Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, объединяющего спутниковый способ навигации и радиотехнический дальномерный способ навигации на основе наземных радиомаяков (НРМ), и может быть использовано при осуществлении навигации ЛА, включая посадку на взлетно-посадочную полосу (ВПП).
Известен спутниковый способ навигации ЛА по N навигационным искусственным спутникам земли (НИСЗ), формирующим рабочее созвездие, который включает прием сигналов НИСЗ на борту ЛА и вычисление по упомянутым сигналам навигационных параметров ЛА, например [1, 2].
Наиболее точным из спутниковых способов навигации является дифференциальный спутниковый способ навигации, в котором прием сигналов НИСЗ производится также на земле на контрольно-корректирующей станции (ККС) с известным местоположением, вычисляются дифференциальные поправки (ДП) по разности между известными и непрерывно определяемыми координатами ККС. Далее ДП транслируются на борт ЛА и с помощью них корректируются навигационные параметры ЛА.
Для определения местоположения в дифференциальном режиме могут использоваться ДП к навигационным параметрам ЛА как в виде ДП к координатам [1, 3, 4], так и в виде ДП к псевдодальностям [1, 4, 5, 6]. Каждому из указанных способов формирования и использования ДП присущи свои достоинства и недостатки.
При передаче с ККС ДП к координатам объем передаваемой информации значительно меньше, чем при передаче ДП к псевдодальностям. Недостатком такого способа является необходимость работы на ККС и на ЛА по одному и тому же рабочему созвездию навигационных спутников, что обеспечивается либо передачей дополнительной информации о составе рабочего созвездия, по которому выработаны ДП к координатам, либо увеличением на ККС минимально допустимого угла места навигационного спутника. Следует также отметить, что требование идентичности навигационных созвездий на ККС и на ЛА было необходимым при работе по созвездию с минимальным количеством спутников. В спутниковых навигационных системах ГЛОНАСС и GPS современной конфигурации, а также при работе по двум системам одновременно, созвездие радионавигационных точек обладает большой избыточностью спутников, и приведенное выше требование не является определяющим при исправных спутниках [4].
При передаче с ККС ДП к псевдодальностям требуется значительный информационный объем, но при этом появляется возможность повысить надежность определения навигационных параметров путем дополнительного контроля характеристик доступности спутниковой системы [7]. Кроме того, при передаче ДП к псевдодальностям в нормативных документах ИКАО предусмотрена передача с ККС в составе корректирующей информации данных для проведения на ЛА тропосферной коррекции ДП с учетом разности высот ККС и ЛА. В известных аналогах, в которых используется способ передачи ДП к координатам, их тропосферная коррекция с учетом высоты расположения ЛА не предусмотрена. Поэтому при высотах полета более 3000 м может произойти ухудшение точности местоопределения ЛА при дифференциальном способе навигации.
Эффективность упоминаемого известного дифференциального способа навигации с коррекцией навигационных параметров ЛА зависит от удаленности ЛА от ККС [3-5]. Максимальный эффект достигается, когда ЛА находится на минимальном расстоянии от ККС.
Для повышения эффективности упомянутого дифференциального способа навигации на ЛА используют ДП от нескольких ККС, разнесенных в пространстве [3-5]. При этом могут быть применены различные варианты объединения ДП от нескольких ККС. Наиболее полно упомянутые варианты описаны в [4].
Известен радиотехнический дальномерный способ навигации на основе определения дальностей ЛА до L наземных радиомаяков (НРМ), который включает излучение запросных дальномерных сигналов с борта ЛА, прием этих сигналов на НРМ, формирование и излучение ответных дальномерных сигналов, измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение с помощью данного измерения навигационных параметров ЛА, например [8].
Каждый из упомянутых способов навигации имеет свои достоинства и недостатки.
Достоинством спутникового метода навигации является глобальность и высокая точность измерения. Недостатком является низкая помехоустойчивость и высокая, с точки зрения безопасности полета, вероятность отказа. Поэтому при решении задач навигации ЛА спутниковый способ целесообразно дополнять радиотехническим дальномерным способом навигации.
Радиотехнический дальномерный способ навигации предполагает большое отношение сигнал/шум и характеризуется высокой помехоустойчивостью, однако используемые радиосигналы не обеспечивают высокой точности, а применение способа требует совместной работы с автономными датчиками на ЛА.
Общее повышение надежности способа навигации и уменьшение его недостатков достигается путем одновременного использования обоих упомянутых способов.
Такой комплексный способ навигации и система на его основе используется, например, в [9, 10].
Прототипом заявленного изобретения является комплексный способ по патенту [9], в котором совместно используются три способа навигации: инерциальный, спутниковый и радиотехнический дальномерный.
В данном изобретении рассматривается комплексный способ навигации, объединяющий спутниковый и радиотехнический дальномерный способы, взаимодействующие между собой. Дополнительное возможное использование инерциальной системы (ИНС) при этом не создает новых, отличающихся от прототипа [9] свойств. Кроме того, использование ИНС имеет место на небольшом парке ЛА в связи с высокой стоимостью, а необходимые для навигации параметры обеспечивают штатные автономные датчики ЛА. В связи с этим патент [9] как прототип может быть описан следующим образом.
Комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения местоположения ЛА использование спутникового способа навигации по N навигационным искусственным спутникам земли (НИСЗ), формирующим рабочее созвездие, который включает прием сигналов НИСЗ на борту ЛА, определение по упомянутым сигналам навигационных параметров ЛА по спутниковому способу в виде псевдодальностей и координат, и одновременно с упомянутым способом использование радиотехнического дальномерного способа навигации на основе определения дальностей ЛА до L наземных радиомаяков (НРМ), который включает излучение по дальномерному каналу запросных дальномерных сигналов с борта ЛА, прием упомянутых сигналов на НРМ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на борту ЛА упомянутых ответных сигналов, измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров ЛА по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров ЛА, полученных по каждому из упомянутых способов навигации, и отображение результатов вычислений на дисплее, при этом в бортовом вычислителе вырабатываются сигналы управления частотно-временным режимом формирования последовательности упомянутых запросных дальномерных сигналов при использовании базы данных ЛА.
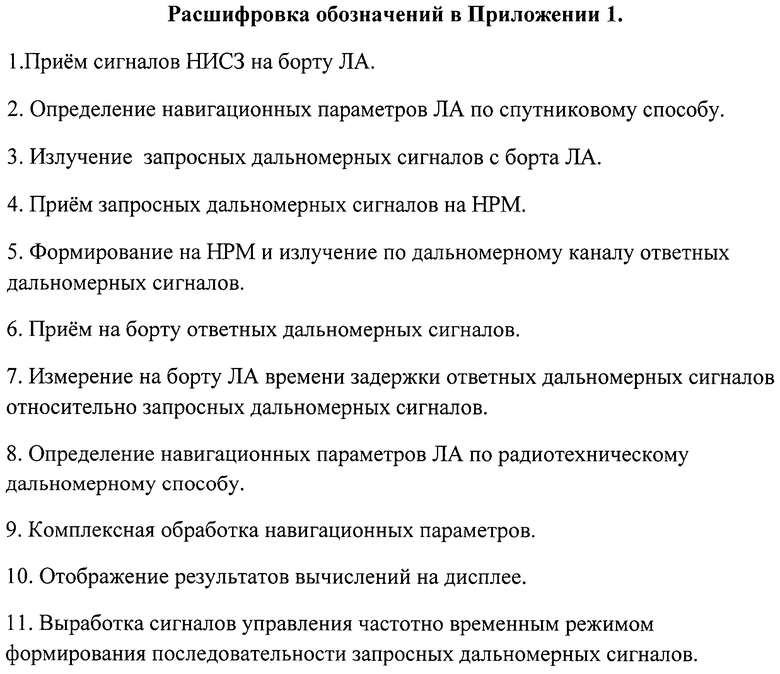
Блок-схема и перечень последовательности действий способа прототипа представлены в Приложении 1.
Недостатками способа прототипа являются недостаточная точность и надежность, особенно при осуществлении посадки ЛА на ВПП, что связано с использованием стандартного (недифференциального) спутникового способа навигации.
Задачей заявленного изобретения является повышение надежности и точности комплексного способа навигации, в первую очередь при посадке ЛА. Задача решается следующим образом.
Предлагается комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения местоположения ЛА использование спутникового способа навигации по N навигационным искусственным спутникам земли (НИСЗ), формирующим рабочее созвездие, который включает прием сигналов НИСЗ на борту ЛА, определение по упомянутым сигналам навигационных параметров ЛА по спутниковому способу в виде псевдодальностей и координат, и одновременно с упомянутым способом использование радиотехнического дальномерного способа навигации на основе определения дальностей ЛА до L наземных радиомаяков (НРМ), который включает излучение по дальномерному каналу запросных дальномерных сигналов с борта ЛА, прием упомянутых сигналов на НРМ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на борту ЛА упомянутых ответных сигналов, измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров ЛА по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров ЛА, полученных по каждому из упомянутых способов навигации, и отображение результатов вычислений на дисплее, при этом в бортовом вычислителе вырабатываются сигналы управления частотно-временным режимом формирования последовательности упомянутых запросных дальномерных сигналов при использовании базы данных ЛА, кроме того, предлагаемый способ дополнительно предусматривает то, что прием сигналов НИСЗ также производится на земле, по крайней мере, на одном из названных НРМ, расположенном наиболее близко к выбранной взлетно-посадочной полосе, на которую предстоит посадка ЛА, на данном НРМ производится определение по спутниковому способу навигации опорных координат НРМ, являющихся координатами точки приема спутниковых сигналов, непрерывно вычисляются уточненные опорные и базовые координаты НРМ, определяются дифференциальные поправки (ДП) к навигационным параметрам ЛА в виде ДП к координатам и ДП к псевдодальностям по спутниковому способу навигации, производится формирование пакета корректирующей информации, включающей ДП к координатам, ДП к псевдодальностям, погрешности определения ДП, данные тропосферной рефракции и уточненные базовые координаты НРМ, при этом данные тропосферной рефракции предварительно рассчитываются на основе обновляющихся метеоданных, параллельно на борту ЛА формируется и излучается по дальномерному каналу запросный информационный сигнал, который принимается на НРМ, далее производится излучение с НРМ по дальномерному каналу ответного информационного сигнала с пакетом корректирующей информации, причем передаются ДП только в виде ДП к координатам, на борту ЛА выполняется прием ответного информационного сигнала и выделение из пакета корректирующей информации упомянутых составляющих, определение навигационных параметров ЛА по радиотехническому дальномерному способу с учетом информации от автономных датчиков ЛА и уточненных базовых координат НРМ, вычисление навигационных параметров ЛА по спутниковому способу в виде координат с коррекцией на основе ДП к координатам и данных тропосферной рефракции, комплексная обработка навигационных параметров выполняется с учетом погрешностей определения ДП и выполняется непрерывная коррекция алгоритма комплексной обработки навигационных параметров, производится непрерывная сравнительная оценка погрешностей определения навигационных параметров по спутниковому и радиотехническому способам навигации, а при достижении ЛА зоны аэродрома и переходе к посадке выполняется, в случае меньшего значения погрешности по спутниковому способу навигации, перевод упомянутого выше режима формирования последовательности запросных дальномерных сигналов L НРМ в режим запроса только одного НРМ, расположенного у выбранной взлетно-посадочной полосы, при этом запросный информационный сигнал содержит признак упомянутого режима запроса только одного НРМ, а ответный информационный сигнал передается с упомянутыми выше составляющими корректирующей информации, причем ДП передаются только в виде ДП к псевдодальностям, на борту ЛА проводится выделение из пакета корректирующей информации упомянутых составляющих с ДП к псевдодальностям и коррекция псевдодальностей, а далее по откорректированным псевдодальностям вычисляются уточненные координаты ЛА.
Кроме того, предлагается развитие комплексного способа, в котором в случае передачи на борт корректирующей информации с ДП к координатам в составе данных тропосферной рефракции передаются тропосферный коэффициент масштабирования высоты и тропосферная поправка координат НРМ, при этом выполняется корректировка ДП к координатам с учетом высоты ЛА по уравнению:

где Δh - откорректированное на борту ЛА значение ДП к координатам;
Δк - значение ДП к координатам, передаваемое с НРМ;
Δтр - тропосферная поправка координат НРМ;
Δh - разность высот расположения НРМ и ЛА;
h0 - тропосферный коэффициент масштабирования высоты.
Предлагается вариант комплексного способа, в котором опорные и базовые координаты НРМ, расположенного у взлетно-посадочной полосы, определяются и уточняются с помощью спутникового способа навигации путем усреднения данных при накоплении их на достаточном интервале времени.
Предлагается вариант комплексного способа, в котором комплексная обработка навигационных параметров ЛА производится с помощью фильтра Калмана, а непрерывная коррекция алгоритма комплексной обработки производится путем соответствующего изменения весовых коэффициентов, используемых в фильтре Калмана, на основе непрерывной оценки погрешностей для спутникового и дальномерного способов навигации.
Предлагается вариант комплексного способа, в котором сравнительная оценка погрешностей по спутниковому и радиотехническому способам навигации проводится путем сопоставления корреляционных матриц ошибок определения координат по каждому из упомянутых способов.
Предлагается вариант комплексного способа, в котором в режиме запроса летательным аппаратом только одного НРМ, расположенного у выбранной взлетно-посадочной полосы, увеличивают частоту повторения запросных информационных сигналов.
Предлагается вариант комплексного способа, в котором в режиме запроса только одного НРМ в запросном информационном сигнале формируется дополнительный код, по которому осуществляется санкционированный доступ к ответному информационному сигналу НРМ.
Предлагается вариант комплексного способа, в котором при полете нескольких ЛА, выполняющих посадку с использованием одного и того же НРМ, после посадки первого ЛА производят последовательно переход в режим запроса только одного НРМ при посадке каждого следующего ЛА.
Предлагается вариант комплексного способа, в котором на всех НРМ, по которым осуществляется навигация ЛА, производится прием сигналов НИСЗ, формирование пакета корректирующей информации, использование на борту ЛА корректирующей информации для уточнения навигационных параметров ЛА и координат каждого из L НРМ.
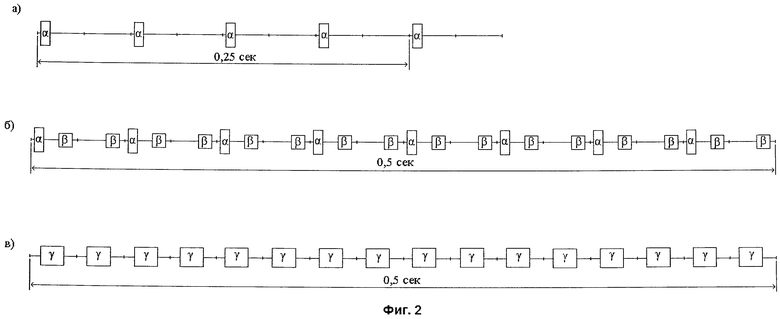
Работа заявляемого способа поясняется с помощью Фиг.1, где представлена блок-схема последовательности действий при реализации комплексного способа навигации, и Фиг.2, отражающей временные диаграммы последовательностей ответных информационных сигналов.
Ниже приведена расшифровка обозначений на Фиг.1:
1 - прием сигналов НИСЗ на борту ЛА;
2 - определение навигационных параметров ЛА по спутниковому способу;
3 - излучение запросных дальномерных сигналов с борта ЛА;
4 - прием запросных дальномерных сигналов на НРМ;
5 - формирование на НРМ и излучение по дальномерному каналу ответных дальномерных сигналов;
6 - прием на борту ЛА ответных дальномерных сигналов;
7 - измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов;
8 - определение навигационных параметров ЛА по радиотехническому дальномерному способу;
9 - комплексная обработка навигационных параметров;
10 - отображение результатов вычислений на дисплее;
11 - выработка сигналов управления частотно временным режимом формирования последовательности запросных дальномерных сигналов;
12 - прием сигналов НИСЗ на НРМ;
13 - определение по спутниковому способу опорных координат НРМ;
14 - вычисление уточненных опорных координат и базовых координат НРМ;
15 - определение дифференциальных поправок к навигационным параметрам;
16 - расчет данных тропосферной рефракции;
17 - формирование пакета корректирующей информации;
18 - формирование на борту ЛА и излучение по дальномерному каналу запросного информационного сигнала;
19 - прием на НРМ по дальномерному каналу запросного информационного сигнала;
20 - излучение с НРМ по дальномерному каналу ответного информационного сигнала с корректирующей информацией;
21 - прием ответного информационного сигнала на борту ЛА;
22 - выделение составляющих пакета корректирующей информации;
23 - вычисление навигационных параметров ЛА по спутниковому способу навигации в виде координат с коррекцией;
24 - непрерывная оценка погрешности определения навигационных параметров ЛА по каждому способу навигации;
25 - непрерывная коррекция алгоритма комплексной обработки навигационных параметров;
а - дифференциальные поправки;
b - данные тропосферной коррекции;
с - погрешности определения дифференциальных поправок;
d - уточненные базовые координаты.
Способ, согласно Фиг.1, включает характерные для способа-прототипа действия: прием сигналов НИСЗ на борту ЛА 1, определение навигационных параметров ЛА по спутниковому способу 2, излучение запросных дальномерных сигналов с борта ЛА 3, прием запросных дальномерных сигналов на НРМ 4, формирование на НРМ и излучение по дальномерному каналу ответных дальномерных сигналов 5, прием на борту ЛА ответных дальномерных сигналов 6, измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов 7, определение навигационных параметров ЛА по радиотехническому дальномерному способу 8, комплексная обработка навигационных параметров 9, отображение результатов вычислений на дисплее 10 и выработка сигналов управления частотно-временным режимом формирования последовательности запросных дальномерных сигналов 11.
Предложены новые действия, реализующие заявленный способ. Новизна способа, согласно Фиг.1, состоит в том, что прием сигналов НИСЗ также производится на НРМ 12 и при этом производится определение по спутниковому способу опорных координат НРМ 13, вычисляются уточненные опорные и базовые координаты НРМ 14, определяются дифференциальные поправки (ДП) к навигационным параметрам ЛА в виде ДП к координатам и ДП к псевдодальностям по спутниковому способу навигации 15, производится расчет данных тропосферной рефракции 16, формирование пакета корректирующей информации, включающей ДП к координатам, ДП к псевдодальностям, погрешности определения ДП, данные тропосферной рефракции и уточненные базовые координаты НРМ 17, формирование на борту ЛА и излучение по дальномерному каналу запросного информационного сигнала 18, прием на НРМ по дальномерному каналу запросного информационного сигнала 19, включение упомянутого пакета в ответный информационный сигнал НРМ и излучение с НРМ по дальномерному каналу ответного информационного сигнала 20, прием ответного информационного сигнала на борту ЛА 21, выделение составляющих пакета корректирующей информации 22, после чего вычисляются навигационные параметры ЛА по спутниковому способу навигации в виде координат с коррекцией 23, при этом выполняется сравнительная оценка погрешностей определения навигационных параметров ЛА по каждому из упомянутых способов навигации 24 и непрерывная коррекция алгоритма комплексной обработки навигационных параметров 25.
На Фиг.1 тонкими линиями обозначены действия, совпадающие с прототипом, штриховыми - действия, известные из аналогов, жирными линиями - новые введенные действия; комбинированные линии обозначают совместное применение перечисленных признаков.
Работа заявляемого способа происходит следующим образом. Действия 1-8, 10 выполняются полностью аналогично прототипу. Действия 9, 11 выполняют то же основное назначение, но имеют дополнительные возможности по сравнению с прототипом. Основная новизна состоит в том, что в предлагаемом комплексном способе навигации предусмотрены два режима: режим навигации ЛА на маршруте с использованием спутникового и радиотехнического дальномерного (по сигналам L НРМ) способов и режим посадки ЛА с использованием спутникового способа и ответных информационных сигналов одного НРМ. Кроме того, навигационные параметры, определяемые по спутниковому способу, вычисляются с учетом ДП к координатам с коррекцией на тропосферную рефракцию, при этом при смене режима навигации на режим посадки изменяется и вид корректируемых навигационных параметров - при навигации корректировка происходит по ДП к координатам, а при посадке - по ДП к псевдодальностям.
В радиотехническом дальномерном способе используется два вида сигналов:
- запросные/ответные дальномерные сигналы (содержат только кодовую группу импульсов);
- запросные/ответные информационные сигналы (дополнительно к кодовой группе импульсов содержат информационную часть).
Рассмотрим особенности операций, выполняемых на НРМ. Как в типовых НРМ, в прототипе предусмотрен режим излучения фоновых сигналов, действующий без запросных сигналов ЛА [8]. При этом от генератора хаотической импульсной помехи выполняется формирование ответных сигналов 5. Частота повторения этих сигналов ограничена энергетическим потенциалом работы передатчика НРМ. Сформированные от упомянутого генератора ответные дальномерные сигналы используются на борту ЛА для оценки уровня сигнала. Прием запросных дальномерных сигналов ЛА 4 в НРМ приводит к замещению фонового сигнала кодированным ответным дальномерным сигналом.
В НРМ также осуществляется прием сигналов НИСЗ 12 и определение опорных координат точки приема спутниковых сигналов (фазового центра антенны приемника сигналов НИСЗ) 13. Дальнейшие действия зависят от статуса НРМ (статус НРМ передается в информационном сообщении).
Следует различать два статуса НРМ - А и Б. Для НРМ, имеющего статус А, базовые координаты (место расположения фазового центра антенны передатчика) известны с точностью геодезической привязки (и имеются в базе данных ЛА). В этом случае координаты точки приема спутниковых сигналов Х0 (опорные координаты) также известны и в НРМ выполняется формирование ДП к координатам и ДП к псевдодальностям 15.
Для формирования ДП к координатам используются известные опорные координаты Х0, а также определенные в момент времени i при приеме сигналов НИСЗ координаты X(i):

где Δк(i) - ДП к координатам в момент времени i.
ДП к координатам включаются в пакет корректирующей информации 17 по запросному информационному сигналу ЛА. Кроме того, в информационный пакет НРМ включаются: элементы корреляционной матрицы ошибок определения ДП к координатам Рдп (в информационный пакет включаются три диагональных элемента корреляционной матрицы Рдп, а также три элемента, учитывающих корреляцию ошибок Δк(i) [10]); данные тропосферной рефракции (тропосферный коэффициент масштабирования высоты и тропосферная поправка координат НРМ). Расчет данных тропосферной рефракции 16 осуществляется по известным формулам в зависимости от метеоданных [15].
Для формирования ДП к псевдодальностям также используются известные опорные координаты Х0, которые необходимы при вычислении расстояний до каждого используемого спутника. Кроме того, может использоваться дополнительная корректирующая информация, обеспечивающая повышение общей надежности способа (например, могут включаться оценки дисперсий ошибок ДП к псевдодальностям [11]).
ДП к псевдодальностям и дополнительная информация включаются в ответный информационный сигнал НРМ после приема запросного информационного сигнала ЛА, содержащего признак запроса только одного НРМ.
Для НРМ, имеющего статус Б, геодезической привязки нет, и его базовые координаты (а также координаты точки приема спутниковых сигналов) известны неточно. В этом случае выполняется вычисление уточненных опорных координат НРМ 14 путем усреднения определенных при приеме сигналов НИСЗ координат X(i) [13].
Уточненные координаты ХУТ равны:

где весовой коэффициент в начале работы НРМ переменный: K(i)=1/i, i<Nf, а затем - постоянный: K(i)=1/Nf (Nf - константа, определяющая интервал усреднения координат).
Далее производится пересчет уточненных опорных координат к базовым координатам НРМ 14.
В НРМ со статусом Б также выполняется формирование ДП к координатам и ДП к псевдодальностям 15 описанным выше способом. В отличие от НРМ со статусом А, в НРМ со статусом Б выполняется регулярное (без запроса ЛА) периодическое излучение ответных информационных сигналов 20, содержащих данные об уточненных базовых координатах и статусе НРМ. С этой целью весь информационный пакет, содержащий уточненные координаты и статус НРМ, разбивается на информационные посылки и передается в заданном темпе. Например, для передачи 3-х уточненных координат требуется следующее количество бит информации: 32 (широта) +32 (долгота) +24 (высота) = 88 бит информации. Информационный пакет (Фиг.2, а) разбивается на несколько (например, четыре) информационных посылок, содержащих уточненные базовые координаты, передаваемые сигналами формата α, а также заголовок и элементы циклической проверки целостности, и эти посылки передаются периодически в течение 0,25 сек (тогда на борту ЛА уточненные базовые координаты НРМ будут гарантированно приняты во временном интервале работы с данным НРМ, равным, например, 0,5 сек).
Для организации дифференциального режима навигации на борту ЛА выполняется формирование и излучение запросных информационных сигналов 18 и их прием на НРМ 19. Соответственно, кроме приема запросных дальномерных сигналов ЛА 4 возможен прием запросных информационных сигналов ЛА 19. Если на НРМ принимается такой сигнал ЛА, то выполняется его декодирование. В случае содержания в запросном информационном сигнале запроса на ДП к координатам (режим навигации ЛА на маршруте с использованием сигналов L НРМ) формирование пакета корректирующей информации 17 производится с данными о ДП к координатам, а также с дополнительной информацией об элементах корреляционной матрицы ошибок определения ДП, тропосферном коэффициенте масштабирования высоты и тропосферной поправке координат НРМ (сигналы формата β на фиг.2б). При этом весь информационный пакет, содержащий данные о ДП к координатам и дополнительную информацию, разбивается на информационные посылки и излучается в ответных информационных сигналах в заданном темпе 20. Кроме того, в случае необходимости в информационный пакет включаются уточненные базовые координаты НРМ (для НРМ со статусом Б).
Оценим возможность передачи информации рассматриваемым методом. Например, для передачи 3-х ДП к координатам требуется 3×16=48 бит информации, для передачи данных об элементах корреляционной матрицы Рдп (6 элементов) требуется 6×8=48 бит, для передачи данных о тропосферном коэффициенте масштабирования высоты и тропосферной поправке координат НРМ требуется 2x16=32 бита. Всего, вместе со статусом, требуется 130 бит. Информационный пакет (Фиг.2, б) разбивается на несколько (например, восемь) информационных посылок, содержащих также заголовок и элементы циклической проверки целостности, и они передаются периодически в течение 0,25 сек (тогда на борту ЛА уточненные базовые координаты НРМ будут гарантированно приняты во временном интервале работы с данным НРМ, равным, например, 0,5 сек). По окончании передачи информационного пакета (в ответных информационных сигналах) на НРМ проверяется наличие очередного запросного информационного сигнала ЛА (с запросом ДП к координатам) и, при его наличии, передача ответных информационных сигналах НРМ повторяется.
В случае если НРМ принимает запросный информационный сигнал ЛА с содержанием в нем запроса на ДП к псевдодальностям (режим посадки ЛА), то формируется, независимо от статуса НРМ, пакет корректирующей информации с данными о ДП к псевдодальностям. При этом объем пакета зависит от числа наблюдаемых на НРМ спутников. Поэтому вычисляется полный объем информационного пакета, содержащего статус НРМ, ДП к псевдодальностям и дополнительные показатели, далее этот пакет разбивается на информационные посылки (Фиг.2, в) и излучается в ответных информационных сигналах формата γ в заданном темпе 20. Например, согласно [11], для передачи информационного пакета с ДП к псевдодальностям в формате RTCA (сообщение типа 1) требуется 56 бит (общая часть сообщения) + N∗56 бит (N - число спутников). Если N=10, то получаем 616 бит. Данный пакет разбивается на несколько информационных посылок, содержащих также заголовок и элементы циклической проверки целостности, и они передаются периодически в течение 0,5 сек (тогда на борту ЛА, находящегося в режиме посадки и, соответственно, в режиме запроса только этого НРМ, полный информационный пакет с ДП к псевдодальностям будет приниматься в темпе 0,5 сек). Передача такого объема информации существенно загружает канал ответных дальномерных сигналов НРМ. Современное бортовое оборудование ЛА обеспечивает измерение дальности при снижении вероятности ответа до величины 0,5 (при расчетной 0,7). Поэтому передачу указанного объема информации в течение 0,5 сек необходимо уложить во временной интервал, не превышающий 0,25 сек. Если НРМ передает ответные информационные сигналы с ДП к псевдодальностям, то передача ответных информационных сигналов, содержащих ДП к координатам и уточненные координаты, прекращается.
Рассмотрим особенности действий, выполняемых на борту ЛА. В бортовом оборудовании ЛА реализуются два способа навигации: радиотехнический дальномерный способ, использующий сигналы нескольких (до L) НРМ, и спутниковый способ навигации, работающий в дифференциальном режиме.
Для реализации радиотехнического дальномерного способа навигации на борту ЛА необходимо иметь координаты L НРМ и измерять дальности до НРМ путем излучения запросных дальномерных сигналов 3, приема этих сигналов 6 и измерения задержки ответных дальномерных сигналов НРМ 7. В режиме навигации ЛА в ответ на излучаемые запросные дальномерные сигналы с борта ЛА 3 выполняется прием ответных дальномерных сигналов от L НРМ 6, и дополнительно, не используя свои запросные информационные сигналы, производится прием от НРМ со статусом Б ответных информационных сигналов 21, содержащих данные об уточненных базовых координатах и статусе таких НРМ. В радиотехническом дальномерном способе навигации выполняется вычисление навигационных параметров ЛА 8 на основе комплексирования измерений дальностей до нескольких НРМ с данными от автономных датчиков (датчика воздушных сигналов, курсовой системы и измерителя высоты) [14].
Бортовой приемник дальномерных сигналов в соответствии с выработкой сигналов управления частотно-временным режимом 11 работает в режиме частотно-кодового сканирования (например, работает последовательно с пятью НРМ по 0,5 сек с каждым и общим периодом сканирования 2,5 сек). Задача выбора L НРМ с наилучшей геометрией для решения навигационной задачи базируется на вычислении геометрического фактора [14], производимом при комплексной обработке навигационных параметров. При этом используется матрица линеаризованных измерений дальностей в локальной системе координат:

где Δхj, Δyj, Δzj - разности координат ЛА и j-го НРМ; dj - расстояние до j-го НРМ.
Используя (4), вычисляется корреляционная матрица ошибок оценивания координат:
и определяется геометрический фактор дальномерного способа навигации для горизонтальных координат (сумма первых двух диагональных элементов нормированной корреляционной матрицы ошибок оценивания координат):

где σ2 - среднеарифметическое значение дисперсий 
Непрерывная оценка погрешностей определения координат дальномерным способом 24 выполняется по формуле (5).
Если количество доступных НРМ превышает L, то при выработке сигналов управления 11 выбирается сочетание из L НРМ с минимальным значением ГДМ.
В спутниковом способе навигации на ЛА дифференциальный режим реализуется с использованием ДП к координатам или ДП к псевдодальностям. В режиме навигации ЛА на маршруте с использованием сигналов L НРМ на борту ЛА происходит выделение составляющих из информационного пакета корректирующей информации 22 - ДП к координатам, а также набор дополнительной информации об элементах корреляционных матриц ошибок определения ДП к координатам, тропосферных коэффициентах масштабирования высоты и тропосферных поправках координат.
ДП к координатам включают в себя тропосферную составляющую, обусловленную рефракцией радиоволн в тропосфере Земли. Ее величина зависит от высоты фазового центра приемной антенны и, в общем случае, неодинакова для НРМ и ЛА. Поэтому принятые и декодированные на борту ЛА значения ДП к координатам должны быть скорректированы с учетом разности высот расположения антенн НРМ и ЛА. С этой целью применяется ранее не рассматриваемая следующая последовательность действий. На НРМ определение ДП 15 выполняется дважды на один и тот же момент времени: с учетом тропосферной коррекции в измеренных значениях псевдодальностей [11, 15] и без такого учета. Разность между ними дает тропосферную поправку координат НРМ Δтр:

где Δк - ДП к координатам без учета тропосферной коррекции,

Это значение, соответствующее высоте антенны НРМ, вместе с тропосферным коэффициентом масштабирования высоты h0 передается на борт ЛА в составе дополнительной корректирующей информации. По этим данным и формуле (1) на ЛА выполняется вычисление навигационных параметров 23 с коррекцией ДП к координатам в зависимости от разности высот Δh антенн НРМ и ЛА.
По полученным ДП к координатам от нескольких НРМ вычисляется средневзвешенное значение вектора 
где Δкj - ДП к координатам от j-того НРМ,
wj - весовой коэффициент j-того НРМ.
Величины wj обратно пропорционально зависят от следа Рдп. Полученное средневзвешенное значение вектора ДП 
В результате этих действий определяются координаты ЛА по спутниковому способу в режиме навигации ЛА на маршруте с использованием информационных сигналов L НРМ. В режиме посадки (работа с одним НРМ) при выделении корректирующей информации 22 используются ДП к псевдодальностям, измеренные псевдодальности корректируются, и выполняется вычисление 23 (решение навигационной задачи методом наименьших квадратов [1, 2]).
Комплексная обработка навигационных параметров 9 может быть выполнена разными способами:
- объединение навигационной информации, получаемой путем решения навигационной задачи независимо спутниковым и радиотехническим дальномерным способами (объединение информации по выходу [16]);
- совместная обработка навигационной информации, получаемой спутниковым и радиотехническим дальномерным способами (объединение информации по входу).
В качестве примера рассмотрим первый вариант. В информационном пакете НРМ, передаваемом на борт ЛА, содержатся погрешности определения ДП к координатам, представленные как элементы корреляционной матрицы ошибок определения поправок Рдп (режим навигации ЛА на маршруте с использованием сигналов L НРМ). На борту ЛА в процессе определения координат и решения навигационной задачи с учетом поправок 

Объединение навигационной информации, получаемой путем решения навигационной задачи независимо спутниковым и радиотехническим дальномерным способами, и определение оптимальной оценки X выполняется с помощью комплексного алгоритма [16]:

где Хсп - оценка координат при вычислении по спутниковому способу 23; Хдм - оценка координат при вычислении радиотехническим дальномерным способом 8; К - оптимальный коэффициент усиления, вычисляемый при непрерывной коррекции 25 с использованием выражений (5) и (9):

Поскольку I-K=Pдм(Рсп+Рдм)-1, комплексный алгоритм определения оптимальной оценки 

Погрешность определения навигационных параметров ЛА по спутниковому способу навигации характеризуют элементы матрицы Рсп, погрешность определения навигационных параметров ЛА по радиотехническому дальномерному способу навигации характеризуют элементы матрицы Рдм. В зависимости от погрешностей определения навигационных параметров ЛА в алгоритме комплексной обработки выполняется непрерывная коррекция 25 весовых коэффициентов (I-K и К), с которыми учитываются оценки координат по спутниковому способу Хсп и оценки координат по радиотехническому дальномерному способу Хдм. При этом корреляционная матрица ошибок определения координат ЛА помощью комплексного алгоритма Р равна:

В режиме навигации ЛА спутниковый способ обычно обеспечивает лучшие точностные характеристики (элементы матрицы К существенно меньше элементов матрицы I-K). Радиотехнический дальномерный способ является альтернативным дополнением и используется в форс-мажорных обстоятельствах (интенсивный маневр ЛА, наличие эффектов радиоинтерференции и пр.). Именно в этих обстоятельствах радиотехнический дальномерный способ позволяет выявить неработоспособность спутникового способа навигации и повысить надежность комплексной навигационной системы. Кроме того, связь ЛА с НРМ обеспечивает дифференциальный режим спутниковой навигации, при этом использование ДП к координатам характеризуется приемлемыми точностными характеристиками и позволяет более экономно, благодаря меньшему объему передаваемой информации, расходовать информационный ресурс НРМ.
В режиме посадки ЛА предлагается применить только спутниковый способ навигации в дифференциальном режиме с использованием ДП к псевдодальностям. При приближении ЛА к одному из НРМ с целью захода на посадку производится выработка сигналов запроса 11 только данного НРМ. Формирование запросного информационного сигнала 18 сопровождается запросом на получение ДП к псевдодальностям, при этом НРМ обеспечивает посадку ЛА в соответствии со стандартом RTCA [11].
Таким образом, в отличие от прототипа навигационные параметры ЛА определяются более точно, благодаря вычислению их с коррекцией 23 с учетом дифференциальных поправок и данных тропосферной рефракции, а комплексная обработка 9 ведется с учетом погрешностей определения дифференциальных поправок. Кроме того, выполняется сравнительная оценка погрешностей каждого из способов навигации 24 и коррекция алгоритма комплексной обработки 25. При этом выработка сигналов управления частотно-временным режимом формирования последовательности запросных дальномерных сигналов 11 управляется по результатам сравнительной оценки погрешностей каждого из способов навигации.
Ниже рассмотрены варианты, развивающие и уточняющие предложенный способ.
С целью компенсации тропосферной составляющей ошибки в случае передачи на борт корректирующей информации с ДП к координатам в составе данных тропосферной рефракции передаются тропосферный коэффициент масштабирования высоты и тропосферная поправка координат НРМ, при этом выполняется корректировка ДП к координатам с учетом высоты ЛА с помощью выражения (1). Последовательность действий для формирования тропосферной поправки координат НРМ Δтр дается выражением (7) и описана ранее. Упомянутая при этом тропосферная коррекция измеренных на НРМ псевдодальностей осуществляется по известным формулам [15], приведенным в Приложении 2. С этой целью рассчитываются параметры тропосферы NR и h0, зависящие от метеоданных (температуры, относительной влажности и давления атмосферы в месте расположения НРМ). С учетом убывания тропосферной погрешности с высотой по экспоненциальному закону (см. формулу П2-2) для высоты ЛА до 20 км (выше тропосфера отсутствует) и с учетом локальности рабочей зоны дифференциальной навигации справедлива приведенная выше формула (1).
В случае если базовые координаты НРМ известны неточно (например, для мобильных НРМ), опорные и базовые координаты НРМ, расположенного у взлетно-посадочной полосы, определяются и уточняются с помощью спутникового способа навигации путем усреднения данных при накоплении их на достаточном интервале времени. Базовые координаты НРМ соответствуют месту расположения фазового центра антенны передатчика и должны быть известны на борту ЛА для реализации радиотехнического дальномерного способа навигации. Если они известны не точно, то уточнение их выполняется с помощью следующей последовательности действий. Координаты точки приема спутниковых сигналов Х0 (опорные координаты) усредняются описанным выше способом (3) и далее уточненные опорные координаты пересчитываются к базовым координатам НРМ (место расположения антенны передатчика НРМ относительно антенны приемника спутниковых сигналов известно).
Комплексная обработка навигационных параметров ЛА производится с помощью фильтра Калмана, а непрерывная коррекция алгоритма комплексной обработки производится путем соответствующего изменения весовых коэффициентов, используемых в фильтре Калмана, на основе непрерывной оценки погрешностей для спутникового и дальномерного способов навигации. Для этого на борту ЛА вычисляется корреляционная матрица суммарных ошибок определения координат (навигационных параметров ЛА) по спутниковому способу Рсп с учетом корреляционной матрицы погрешностей определения ДП Рдп, учитывающей специфические ошибки формирования ДП на НРМ, и корреляционной матрицы Рла, учитывающей специфические ошибки определения координат на борту ЛА. При этом весовые коэффициенты алгоритма комплексной обработки К и I-К, как описано выражениями (10)-(12), учитывают ошибки, присущие спутниковому и дальномерному способам навигации.
Сравнительная оценка погрешностей по спутниковому и радиотехническому способам навигации проводится путем сопоставления корреляционных матриц ошибок определения координат по каждому из упомянутых способов. Как отмечено выше, погрешность определения навигационных параметров ЛА по спутниковому способу навигации характеризуют элементы матрицы Рсп, погрешность определения навигационных параметров ЛА по радиотехническому дальномерному способу навигации характеризуют элементы матрицы Рдм. Сопоставление этих корреляционных матриц выполняется путем вычисления следа каждой матрицы и сравнения их по величине (след корреляционной матрицы характеризует сумму дисперсий ошибок оценивания координат).
Для обеспечения надежности посадки в режиме запроса летательным аппаратом только одного НРМ, расположенного у выбранной взлетно-посадочной полосы, увеличивают частоту повторения запросных информационных сигналов. Увеличение частоты повторения запросных информационных сигналов повышает вероятность приема на борту ЛА ответных информационных сигналов и, соответственно, повышает надежность обеспечения режима посадки.
Предусмотрен санкционированный доступ, когда в режиме запроса только одного НРМ в запросном информационном сигнале формируется дополнительный код, по которому осуществляется санкционированный доступ к ответному информационному сигналу НРМ. Санкционированный доступ к ответному информационному сигналу НРМ повышает вероятность приема на борту ЛА ответных информационных сигналов и, соответственно, повышает надежность обеспечения режима посадки специально выделенных ЛА.
Для обеспечения очередности посадки при полете нескольких ЛА, выполняющих посадку с использованием одного и того же НРМ, после посадки первого ЛА производят последовательно переход в режим запроса только одного НРМ при посадке каждого следующего ЛА. При этом ЛА излучают запросные информационные сигналы, принимаемые на НРМ. Если на НРМ принимается такой сигнал ЛА, то выполняется декодирование его информационной части и, в зависимости от его содержания, формируются и излучаются ответные информационные сигналы. Эти сигналы принимают все ЛА, находящиеся в рабочей зоне данного НРМ. При приближении одного из ЛА к данному НРМ с целью захода на посадку бортовая аппаратура переходит в режим запроса только этого НРМ. В информационном сообщении ЛА на НРМ передается запрос на получение ДП к псевдодальностям, при этом НРМ обеспечивает посадку ЛА в соответствии со стандартом RTCA, прекращая передачу иной информации. В таком режиме могут находиться несколько ЛА (при отсутствии санкционированного доступа к информации НРМ). После посадки первого ЛА НРМ обеспечивает посадку очередного ЛА в том же режиме.
С целью обеспечения дифференциального режима спутниковой навигации на всех НРМ, по которым осуществляется навигация ЛА, производится прием сигналов НИСЗ, формирование пакета корректирующей информации, использование на борту ЛА корректирующей информации для уточнения навигационных параметров ЛА и координат каждого из L НРМ. Использование на борту ЛА корректирующей информации, получаемой из ответных информационных сигналов НРМ описанным выше способом, позволяет реализовать дифференциальный режим спутниковой навигации и повысить точность и надежность определения навигационных параметров ЛА. При этом уточнение координат каждого из L НРМ описанным выше способом позволяет использовать мобильные НРМ.
Подчеркнем, что повышение надежности и точности определения навигационных параметров ЛА достигнуто в предложенном комплексном способе навигации благодаря введению новых действий и взаимодействий для спутниковых сигналов и радиотехнических дальномерных и информационных сигналов:
- комплексной обработке с учетом погрешностей определения ДП, непрерывной коррекции алгоритма комплексной обработки и сравнительной оценке погрешностей определения ДП, непрерывной коррекции алгоритма комплексной обработки и сравнительной оценки погрешности определения навигационных параметров по спутниковому и радиотехническому дальномерным способам навигации;
- переходу к посадке на ВПП с использованием спутникового способа для определения навигационных параметров и использованием радиотехнического дальномерного способа для формирования и передачи информационного пакета с корректирующей информацией;
- изменению вида используемых дифференциальных поправок с ДП к координатам на ДП к псевдодальностям.
Варианты предложенного способа расширяют его функциональные возможности.
Математическое моделирование и полунатурные испытания системы навигации, построенной на базе наземного и бортового радиотехнического комплексов дальномерного оборудования и бортовой аппаратуры глобальных навигационных спутниковых систем, в которой реализован заявляемый комплексный способ навигации летательных аппаратов, показывают, что точность в такой системе навигации возрастает в 3-5 раз, помехоустойчивость системы повышается на 50-70 дБ, безопасность полета, по сравнению с прототипом, повышается ориентировочно на 20-30%.
Опытная система, реализующая предложенный способ, была построена с использованием дальномерного канала отечественной аппаратуры РСБН 85В-130 в режиме ОВК, а также аппаратуры глобальной навигационной системы ГЛОНАСС/GPS типа БМС-Индикатор. При этом аппаратная реализация новых предложенных действий была реализована с использованием вычислительных устройств, аналогичным тем, которые применялись в прототипе.
В бортовых комплексах перспективных отечественных ЛА, на которые устанавливается аппаратура РСБН-85В-130 совместно с БМС-Индикатором, были реализованы основные элементы заявляемого комплексного способа навигации, которые подтвердили его эффективность.
Таким образом, заявляемое изобретение чрезвычайно перспективно для использования на ЛА с целью обеспечения глобальности навигационных определений, повышения помехоустойчивости и точности измерения координат и, в конечном итоге, для повышения безопасности полетов.
Литература
1. Сетевые спутниковые радионавигационные системы. / Шебшаевич B.C., Дмитриев П.П, Иванцевич Н.В. и др.; Под ред. B.C.Шебшаевича. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1993. - 408 с.
2. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Перова, В.Н.Харисова. - 4-е изд., перераб. и доп. - М.: Радиотехника. - 800 с.
3. Патент 2130622 RU G01S 5/12 19.12.1997 «Способ групповой навигации движущихся объектов» ВИКУ им. А.Ф.Можайского.
4. Спутниковая дифференциальная подсистема, включающая несколько контрольно-корректирующих станций. // С.Б.Волошин, B.C.Жолнеров, С.П.Зарубин и др. / Новости навигации. - 2005. - №4. - С.31-34.
5. Патент RU 2155969 G01S 5/02 24.05.1999 «Способ дифференциальной навигации» ВИКУ им. А.Ф.Можайского.
6. Патент RU 2112991 G01S 1/02 16.06.1997, «Интегральная радионавигационная система», АОЗТ Фирма «Котлин».
7. Патент RU 2331901 G01S 5/02 17.07.2007, «Способ посадки ЛА с использованием СНС и система посадки на его основе», ЗАО «ВНИИРА-Навигатор».
8. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
9. Патент US 2010/0106416, «Навигация самолета, использующая GPS, инерциальную систему управления, и дистанционные измерения (DME)», 28.10.2008.
10. Патент на полезную модель 113243, «Радиотехнический комплекс навигации и управления полетами ЛА морского базирования», 6.06.2011.
11. Minimum Aviation System Performance Standards for the LAAS, RTCA/DO-245, Washington, Sept.28, 1998.
12. Соловьев Ю.А. Спутниковая навигация и ее приложения. - М.: Эко-Трендз, 2003.
13. Казаринов Ю.М. и др. Проектирование устройств фильтрации радиосигналов. - Л.: Изд. ЛГУ. 1985.
14. Гаврищук В.В. и др. Моделирование и исследование комплексной навигационной системы, содержащей DME, ДВС и датчик курса. Вопросы радиоэлектроники, сер. РЛТ, вып.2. - М. 2009.
15. McGraw G.A. et al. Development of the LAAS accuracy models. - ION GPS 2000, 19-22 September 2000, Salt Lake City, UT. - p.1212-1223.
16. Rogers R.M. Applied mathematics in integrated navigation systems. AIAA, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |


Изобретение относится к области радиотехники, а именно к навигации летательных аппаратов (ЛА), и может быть использовано при осуществлении навигации ЛА, включая посадку на взлетно-посадочную полосу (ВПП). Технический результат заключается в повышении надежности и точности определения координат ЛА. Для этого комплексный способ навигации объединяет спутниковый и радиотехнический дальномерный способы навигации на основе наземных радиомаяков (НРМ), при этом прием сигналов спутников проводят как на борту ЛА, так и на ряде наземных НРМ, в том числе на НРМ у ВПП. На НРМ непрерывно уточняют базовые координаты, определяют дифференциальные поправки (ДП) к координатам и ДП к псевдодальностям, формируют пакет корректирующей информации (КИ) с упомянутыми ДП, погрешностями их определения, вычисленными данными тропосферной рефракции и уточненными базовыми координатами НРМ. По запросу с ЛА НРМ излучает по дальномерному каналу сигнал с КИ, включающей ДП только в виде ДП к координатам. На ЛА вычисляют навигационные параметры с учетом КИ, производят комплексную обработку данных и непрерывную сравнительную оценку погрешностей. При достижении зоны аэродрома и посадке, в случае меньшего значения погрешности по спутниковому способу, режим формирования последовательности запросных дальномерных сигналов ряда НРМ переводят в режим запроса только одного НРМ, расположенного у ВПП, при этом на ЛА в составе КИ передают ДП только в виде ДП к псевдодальностям. По откорректированным псевдодальностям вычисляют уточненные координаты ЛА. 8 з.п. ф-лы, 2 ил., 2 прил.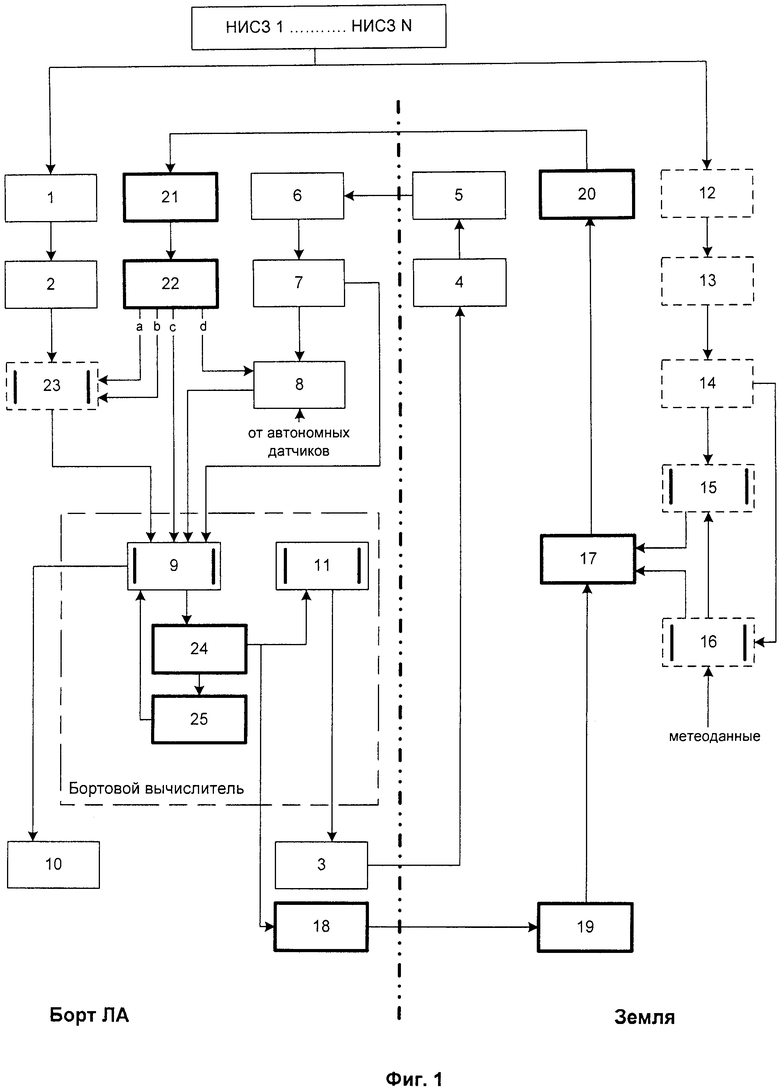
1. Комплексный способ навигации летательных аппаратов (ЛА), предусматривающий для определения местоположения ЛА использование спутникового способа навигации по N навигационным искусственным спутникам земли (НИСЗ), формирующим рабочее созвездие, который включает прием сигналов НИСЗ на борту ЛА, определение по упомянутым сигналам навигационных параметров ЛА по спутниковому способу в виде псевдодальностей и координат, и одновременно с упомянутым способом использование радиотехнического дальномерного способа навигации на основе определения дальностей ЛА до L наземных радиомаяков (НРМ), который включает излучение по дальномерному каналу запросных дальномерных сигналов с борта ЛА, прием упомянутых сигналов на НРМ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на борту ЛА упомянутых ответных сигналов, измерение на борту ЛА времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров ЛА по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров ЛА, полученных по каждому из упомянутых способов навигации, и отображение результатов вычислений на дисплее, при этом в бортовом вычислителе вырабатываются сигналы управления частотно-временным режимом формирования последовательности упомянутых запросных дальномерных сигналов при использовании базы данных ЛА, отличающийся тем, что прием сигналов НИСЗ также производится на земле, по крайней мере, на одном из названных НРМ, расположенном наиболее близко к выбранной взлетно-посадочной полосе, на которую предстоит посадка ЛА, на данном НРМ производится определение по спутниковому способу навигации опорных координат НРМ, являющихся координатами точки приема спутниковых сигналов, непрерывно вычисляются уточненные опорные и базовые координаты НРМ, определяются дифференциальные поправки (ДП) к навигационным параметрам ЛА в виде ДП к координатам и ДП к псевдодальностям по спутниковому способу навигации, производится формирование пакета корректирующей информации, включающей ДП к координатам, ДП к псевдодальностям, погрешности определения ДП, данные тропосферной рефракции и уточненные базовые координаты НРМ, при этом данные тропосферной рефракции предварительно рассчитываются на основе обновляющихся метеоданных, параллельно на борту ЛА формируется и излучается по дальномерному каналу запросный информационный сигнал, который принимается на НРМ, далее производится излучение с НРМ по дальномерному каналу ответного информационного сигнала с корректирующей информацией, причем передаются ДП только в виде ДП к координатам, на борту ЛА выполняется прием ответного информационного сигнала и выделение из пакета корректирующей информации упомянутых составляющих, определение навигационных параметров ЛА по радиотехническому дальномерному способу с учетом информации от автономных датчиков ЛА и уточненных базовых координат НРМ, вычисление навигационных параметров ЛА по спутниковому способу в виде координат с коррекцией на основе ДП к координатам и данных тропосферной рефракции, комплексная обработка навигационных параметров выполняется с учетом погрешностей определения ДП и выполняется непрерывная коррекция алгоритма комплексной обработки навигационных параметров, производится непрерывная сравнительная оценка погрешностей определения навигационных параметров по спутниковому и радиотехническому способам навигации, а при достижении ЛА зоны аэродрома и переходе к посадке выполняется, в случае меньшего значения погрешности по спутниковому способу навигации, перевод упомянутого выше режима формирования последовательности запросных дальномерных сигналов L НРМ в режим запроса только одного НРМ, расположенного у выбранной взлетно-посадочной полосы, при этом запросный информационный сигнал содержит признак упомянутого режима запроса только одного НРМ, а ответный информационный сигнал передается с упомянутыми выше составляющими корректирующей информации, причем ДП передаются только в виде ДП к псевдодальностям, на борту ЛА проводится выделение из пакета корректирующей информации упомянутых составляющих с ДП к псевдодальностям и коррекция псевдодальностей, а далее по откорректированным псевдодальностям вычисляются уточненные координаты ЛА.
2. Комплексный способ по п.1, отличающийся тем, что в случае передачи на борт корректирующей информации с ДП к координатам в составе данных тропосферной рефракции передаются тропосферный коэффициент масштабирования высоты и тропосферная поправка координат НРМ, при этом выполняется корректировка ДП к координатам с учетом высоты ЛА по уравнению:
 ,
,
где Δh - откорректированное на борту ЛА значение ДП к координатам;
Δк - значение ДП к координатам, передаваемое с НРМ;
Δтр - тропосферная поправка координат НРМ;
Δh - разность высот расположения НРМ и ЛА;
h0 - тропосферный коэффициент масштабирования высоты.
3. Комплексный способ по п.1, отличающийся тем, что опорные и базовые координаты НРМ, расположенного у взлетно-посадочной полосы, определяются и уточняются с помощью спутникового способа навигации путем усреднения данных при накоплении их на достаточном интервале времени.
4. Комплексный способ по п.1, отличающийся тем, что комплексная обработка навигационных параметров ЛА производится с помощью фильтра Калмана, а непрерывная коррекция алгоритма комплексной обработки производится путем соответствующего изменения весовых коэффициентов, используемых в фильтре Калмана, на основе непрерывной оценки погрешностей для спутникового и дальномерного способов навигации.
5. Комплексный способ по пп.1 или 3, отличающийся тем, что сравнительная оценка погрешностей по спутниковому и радиотехническому способам навигации проводится путем сопоставления корреляционных матриц ошибок определения координат по каждому из упомянутых способов.
6. Комплексный способ по п.1, отличающийся тем, что в режиме запроса летательным аппаратом только одного НРМ, расположенного у выбранной взлетно-посадочной полосы, увеличивают частоту повторения запросных информационных сигналов.
7. Комплексный способ по п.1, отличающийся тем, что в режиме запроса только одного НРМ в запросном информационном сигнале формируется дополнительный код, по которому осуществляется санкционированный доступ к ответному информационному сигналу НРМ.
8. Комплексный способ по п.3, отличающийся тем, что при полете нескольких ЛА, выполняющих посадку с использованием одного и того же НРМ, после посадки первого ЛА производят последовательно переход в режим запроса только одного НРМ при посадке каждого следующего ЛА.
9. Комплексный способ по п.1, отличающийся тем, что на всех НРМ, по которым осуществляется навигация ЛА, производится прием сигналов НИСЗ, формирование пакета корректирующей информации, использование на борту ЛА корректирующей информации для уточнения навигационных параметров ЛА и координат каждого из L НРМ.
| US 2010106416 A1, 29.04.2010 | |||
| Станок для обтяжки мебельных подушек | 1954 |
|
SU113243A1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2386176C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| US 2011130898 A1, 02.06.2011. | |||

