Изобретение относится к способам пассивной радиолокации. Оно может быть использовано для определения местоположения находящихся на земной поверхности неподвижных источников радиоизлучения (ИРИ), в том числе таких, сигналы которых не разрешаются по времени и частоте. Способ позволяет обнаруживать источники импульсных и непрерывных модулированных, в том числе шумоподобных сигналов и определять их координаты.
Известен способ определения координат источников радиоизлучений с борта летательного аппарата [1]. Недостатком данного способа и, как следствие систем, в которых он может быть реализован, является невозможность определения координат нескольких источников радиоизлучения (ИРИ), сигналы которых не разрешаются приемной аппаратурой по частоте и времени приема.
Известен разностно-дальномерный способ определения координат ИРИ [2, с. 8], при котором местоположение ИРИ на плоскости определяется как точка пересечения двух гипербол, каждая из которых соответствует линии положения ИРИ, соответствующей постоянной разности времен приема сигналов парой приемных пунктов. Недостатком способа является возможность работы только по импульсным сигналам с низкой частотой повторения.
Известен разностно-дальномерный способ определения координат ИРИ с использованием базово-корреляционной обработки сигнала [3, с. 43], позволяющий определять координаты ИРИ, излучающих непрерывные модулированные, в том числе шумоподобные, сигналы. Способ предполагает необходимость обнаружения сигнала и оценки разности времен его приема парой приемных пунктов на основе анализа взаимной корреляционной функции (ВКФ) в каждом измерении. Обнаружением считается событие превышения сигналом (взаимно-корреляционной функцией) порога обнаружения. При низком отношении сигнал/шум порог может не быть превышен, и обнаружение не состоится. Кроме того, при наличии нескольких ИРИ, сигналы которых не разрешаются по времени и частоте, имеют место пересечения гипербол, принадлежащих различным ИРИ, что приводит к ложному обнаружению ИРИ.
Известен разностно-дальномерный способ определения координат источника радиоизлучения [4]. Он заключается в приеме и измерении задержек сигнала группой взаимосвязанных с известным местоположением пунктов приема, решении гиперболических уравнений на центральном приемном пункте, на основе которого определяются координаты ИРИ.
Известен способ, реализованный в корреляционно-базовой системе локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата [5]. Суть способа состоит в определении координат ИРИ парой приемных пунктов, один из которых - подвижный, размещен на беспилотном летательном аппарате. Для каждого положения измерительной базы (отрезка, соединяющего пару приемных пунктов), которое изменяется при движении приемного пункта, производится прием сигналов, их взаимно-корреляционная обработка, обнаружение максимума корреляционной функции (КФ) и построение линии положения ИРИ (гиперболы). Местоположения ИРИ определяются пересечением нескольких линий положения, полученных в результате измерений задержки приема сигнала ИРИ приемными пунктами при различных положениях в пространстве измерительной базы.
Известные способы [2-5] предполагают обнаружение сигнала в каждом измерении, и построение, соответствующей разности времен приема сигнала, линии положения ИРИ (гиперболы). При таком способе обработки исключается возможность накопления сигнала, обеспечивающая более высокое отношение сигнал/шум и, как следствие повышение вероятности обнаружения ИРИ и точности определения его координат.
В качестве наиболее близкого аналога выбран рассмотренный способ, реализованный в [5].
Недостатками способа являются:
низкая эффективность обнаружения ИРИ при малом отношении сигнал/шум;
необходимость решения задачи обнаружения и определения координат ИРИ по множественным пересечениям линий положения, которые по причине ошибок измерений не совпадают с точкой нахождения ИРИ, а находятся в ее окрестностях.
Техническим результатом изобретения является повышение отношения сигнал/шум за счет реализации некогерентного накопления сигнала в разностно-дальномерной базово-корреляционной системе с подвижной измерительной базой и исключение этапа определения координат ИРИ по пересечениям линий его положения.
Технический результат достигается за счет исключения операций принятия решения об обнаружении сигнала в единичном наблюдении, и использовании некогерентного накопления сигнала, предполагающего совместную обработку принятых реализаций сигнала за продолжительное время наблюдения ИРИ при перемещении одного или пары приемных пунктов.
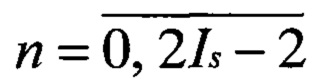
Заявленный способ заключается в одновременном приеме радиосигналов парой разнесенных в пространстве приемных пунктов и расчет ВКФ (фиг. 1) принятых радиосигналов для различных пространственных положений приемных пунктов.
На основе координат приемных пунктов в момент приема радиосигналов и ВКФ, производится расчет корреляционно-разностно-дальномерной поверхности (КРДП) (фиг. 2, 3), представляющей собой функцию от значений ВКФ в пространстве координат поверхности, на которой производится обнаружение источников радиоизлучений, так что значение КРДП в любой ее точке задается равным значению ВКФ, соответствующему постоянной разности задержек, описываемой гиперболой, проходящей через данную точку.
КРДП при обработке дискретного сигнала описывается двумерным массивом значений.
КРДП рассчитывается для каждого положения приемных пунктов, в котором был принят сигнал.
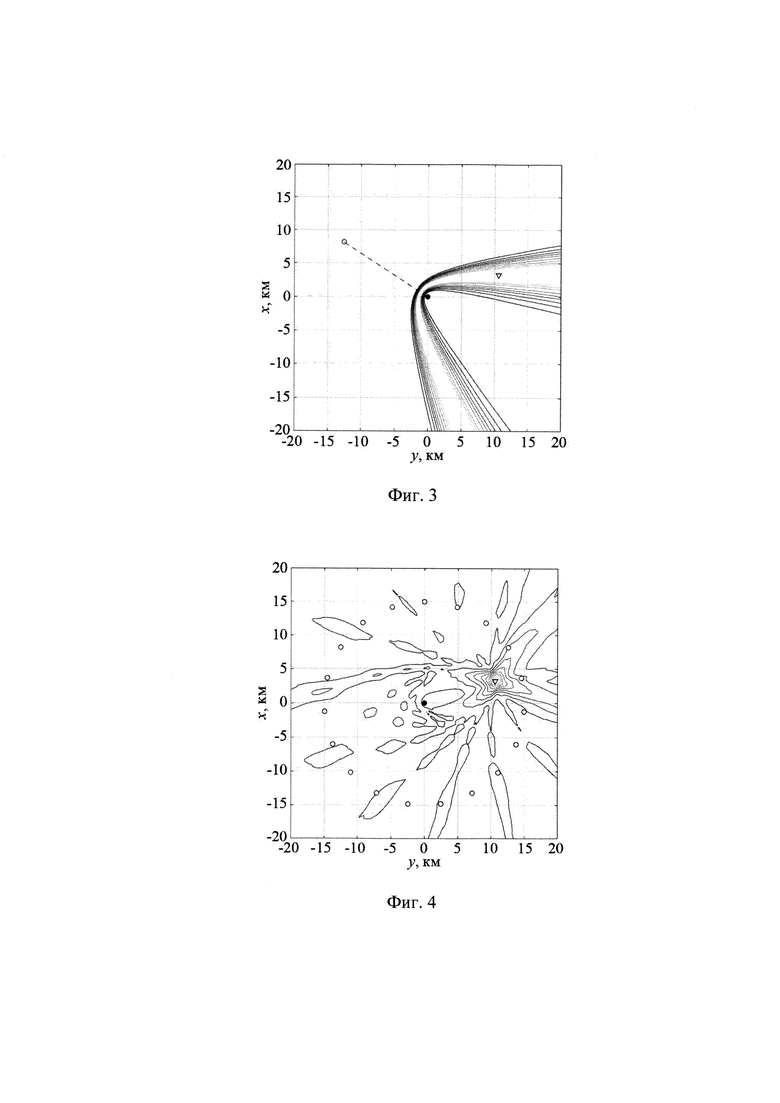
Поверхность сигнального рельефа (фиг. 4-6) рассчитывается поэлементным суммирования полученных КРДП. Такой способ обработки реализует некогерентное накопление сигнала и позволяет получить выигрыш в отношении сигнал/шум. Обнаружение источников радиоизлучения и определение их координат производятся по максимумам поверхности сигнального рельефа.
Поверхность сигнального рельефа при обработке дискретного сигнала описывается двумерным массивом значений.
Прием сигналов производится при перемещении одного или обоих приемных пунктов, периодически, с заданным темпом.
Изобретение иллюстрируется следующими чертежами.
Фиг. 1 - ВКФ реализаций шумоподобного сигнала, принятых парой приемных пунктов.
Фиг. 2 - половина КРДП до ее поворота на угол, равный углу между приемными пунктами.
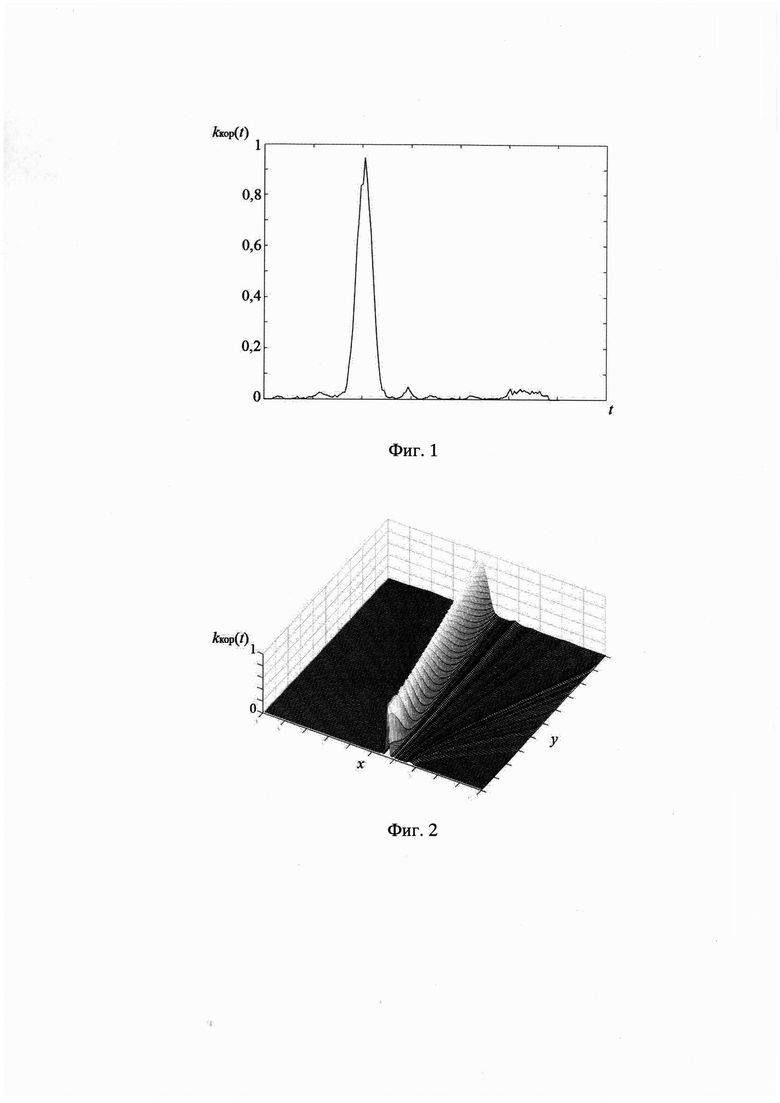
Фиг. 3 - линии уровня КРДП, местоположение приемных пунктов и одного ИРИ.
На фигурах 3-6 обозначены:
 - местоположение приемного пункта №1;
- местоположение приемного пункта №1;
 - местоположение приемного пункта №2 в которых производился прием сигналов;
- местоположение приемного пункта №2 в которых производился прием сигналов;
 - истинное местоположение ИРИ; пунктирная линия - траектория движения приемного пункта №2.
- истинное местоположение ИРИ; пунктирная линия - траектория движения приемного пункта №2.
Фиг. 4 - линии уровня поверхности сигнального рельефа при движении одного приемного пункта по окружности, и одного ИРИ.
Фиг. 5 - линии уровня поверхности сигнального рельефа при прямолинейном движении одного приемного пункта, и одного ИРИ.
Фиг. 6 - линии уровня поверхности сигнального рельефа при движении одного приемного пункта по окружности, и двух ИРИ.
Фигуры получены для следующих исходных данных: приемные пункты и ИРИ находятся на плоскости;
тип сигнала ИРИ - гауссовский шум с шириной спектра по уровню половинной мощности 500 кГц;
объем выборки сигнала - 128;
отношение сигнал/шум в приемных пунктах - 0 дБ;
ошибки определения координат приемных пунктов не учитываются.
Заявленный способ включает следующие этапы:
1. Одновременный прием радиосигналов парой разнесенных в пространстве приемных пунктов. Принятый сигнал в каждом приемном пункте фильтруется, усиливается и преобразуется в цифровую форму. Сигнал, принятый одним из приемных пунктов (дополнительным приемным пунктом) по линии связи передается на второй приемный пункт (основной приемный пункт), где рассчитывается ВКФ принятых сигналов (фиг. 1).
ВКФ дискретных сигналов, согласно [6, с. 206], вычисляется как их дискретная свертка

где Is - объем выборки каждого из сигналов;
 - индексация отсчетов;
- индексация отсчетов;
s1 - выборка сигнала, принятого основным приемным пунктом;
s2 - выборка сигнала, принятого дополнительным приемным пунктом.
2. Расчет двумерного массива КРДП

где round - операция округления до ближайшего целого; с - скорость электромагнитной волны;
Δr - размер элемента разрешения по пространственным координатам;
Nmax, Mmax - размер массива по соответствующим координатам;
τ' - относительная задержка приема сигналов, для точки КРДП с координатами (х, у) относительно прямой, проходящей через приемные пункты;

где В - измерительная база (расстояние между приемными пунктами).
Массив Θ'' формируется путем зеркального отображения массива Θ' относительно стороны, лежащей на прямой, проходящей через приемные пункты.
Массив КРДП Θ рассчитывается путем поворота массива Θ'' на угол, равный углу между нулевым направлением и прямой, проходящей через приемные пункты, при этом, ось поворота совпадает с основным приемным пунктом, и смещения элементов массива по координатам х и у на число элементов, соответствующим перемещению основного приемного пункта относительно его начального положения (первого приема сигналов). Если основной приемный пункт неподвижен, операция смещения элементов массива не производится.
Операции зеркального отображения массива, поворота массива на заданный угол и смещения элементов массива могут производиться по известным алгоритмам, применяемым для обработки растровых графических изображений.
3. Перемещение одного или пары приемных пунктов. Этапы 1-3 повторяются заданное число раз.
4. После завершения накопления сигнала производится поэлементное суммирование полученных массивов КРДП Θ, рассчитанных для различных положений измерительной базы. Результатом суммирования является массив сигнального рельефа.
5. По анализу массива сигнального рельефа производится обнаружение и оценка координат ИРИ. Информация о наличии и координатах ИРИ содержится в максимумах массива сигнального рельефа.
Способ может быть реализован в системах с наземными приемными пунктами, приемными пунктами на воздушных носителях, а также в комбинированной системе.
При малом отношении сигнал/шум известные способы не обеспечивают гарантированного обнаружения ИРИ даже при длительном наблюдении его сигнала. Предложенный способ лишен данного недостатка, поскольку операции обнаружения сигнала и построения соответствующей ему линии положения в каждом измерении исключены.
Выигрыш в отношении сигнал/шум обеспечивается за счет обработки всех сигналов с учетом отношения сигнал/шум в каждом измерении. Кроме того, в предложенном способе отсутствует этап определения координат ИРИ по пересечениям линий его положения, за счет чего достигается заявленный технический результат.
Литература
1. Патент на изобретение №2619915. Способ определения координат источника радиоизлучений с борта летательного аппарата.
2. Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения, -М.: «Оборгиз», 1958.
3. Куприянов А.И. Радиоэлектронная борьба. - М.: «Вузовская книга», 2013.
4. Патент на изобретение №2000129837. Разностно-дальномерный способ пеленгования источников радиоизлучения и реализующее его устройство.
5. Патент на изобретение №2674265. Корреляционно-базовая система локации неподвижных источников радиоизлучения с использованием беспилотного летательного аппарата.
6. Р. Лайонс. Цифровая обработка сигналов. Пер. с англ. - М.: ООО «Бином-Пресс», 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ И НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО СИГНАЛАМ РАДИОИЗЛУЧЕНИЯ ИХ БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2599984C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| Способ определения координат источников радиоизлучений и система для его реализации | 2019 |
|
RU2717828C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения (варианты) и устройство для их реализации | 2020 |
|
RU2740640C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ МИНИМАЛЬНОГО ЧАСТОТНОГО СДВИГА (MSK) СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2020 |
|
RU2747108C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| УСТРОЙСТВО ПОИСКА ЗАБРАСЫВАЕМЫХ ПЕРЕДАТЧИКОВ ПОМЕХ | 2016 |
|
RU2620607C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2704793C1 |
Изобретение относится к способам пассивной радиолокации в системах радиомониторинга и радиотехнической разведки и может быть использовано для определения местоположения находящихся на земной поверхности неподвижных источников радиоизлучения, в том числе тех, чьи сигналы не разрешаются по времени и частоте. Техническим результатом является повышение отношения сигнал/шум. В заявленном способе реализуют некогерентное накопление сигнала в разностно-дальномерной базово-корреляционной системе с подвижной измерительной базой с исключением этапа определения координат источника радиоизлучения по пересечениям линий его положения. Использование некогерентного накопления сигнала предполагает совместную обработку принятых реализаций сигнала за продолжительное время наблюдения источников радиоизлучения при перемещении одного или пары приемных пунктов. Способ позволяет обнаруживать источники импульсных и непрерывных модулированных, в том числе шумоподобных, сигналов и определять их координаты. 6 ил.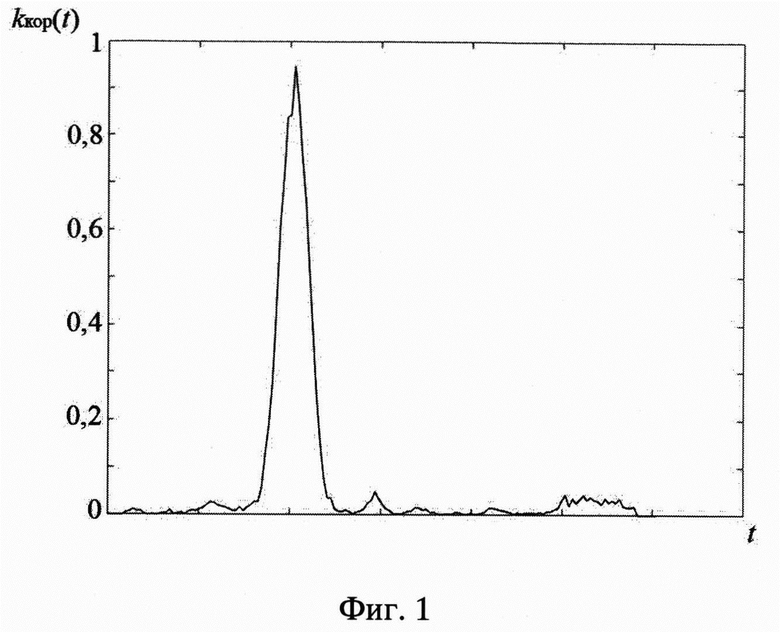
Способ обнаружения и определения координат источников радиоизлучений, предусматривающий одновременный прием радиосигналов парой разнесенных в пространстве приемных пунктов, передачу сигнала, принятого одним из приемных пунктов, по линии связи на второй приемный пункт и расчет на втором приемном пункте взаимной корреляционной функции принятых радиосигналов для различных пространственных положений приемных пунктов, отличающийся тем, что на основе координат приемных пунктов в момент приема радиосигналов и взаимной корреляционной функции производят расчет корреляционно-разностно-дальномерной поверхности, представляющей собой функцию от значений взаимной корреляционной функции в пространстве координат поверхности, на которой производится обнаружение источников радиоизлучений, так что значение корреляционно-разностно-дальномерной поверхности в любой ее точке задается равным значению взаимной корреляционной функции радиосигналов, соответствующему постоянной разности задержек приема радиосигналов парой приемных пунктов, описываемой гиперболической линией положения источника радиоизлучения, проходящей через данную точку, осуществляют периодическое перемещение одного или пары приемных пунктов заданное число раз, корреляционно-разностно-дальномерные поверхности рассчитывают для каждого положения приемных пунктов, в котором был принят радиосигнал, после завершения накопления радиосигнала производят поэлементное суммирование полученных массивов корреляционно-разностно-дальномерных поверхностей, рассчитанных для различных положений измерительной базы между парой приемных пунктов, получая тем самым поверхность сигнального рельефа, обнаружение источников радиоизлучения и определение их координат производят по максимумам поверхности сигнального рельефа.
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| CN 112666546 A, 16.04.2021 | |||
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Способ определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе | 2020 |
|
RU2745108C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНЫХ СТАНЦИЙ | 2005 |
|
RU2297718C1 |
| ЛОЩИНИН И.В., АРХИПЕНКОВ Д.В | |||
| Методы определения пространственных координат постановщиков активных помех в базово-корреляционных системах пассивной локации // Радиотехника и | |||
