ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет по дате подачи заявки № EP 11176609.3 на выдачу европейского патента, поданной 4 августа 2011 г., раскрытие которой настоящим включено в данный документ посредством ссылки, и предварительной заявки № 61/515184 на выдачу патента США, поданной 4 августа 2011 г., раскрытие которой настоящим включено в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Изобретение имеет отношение к измерениям уровня. Изобретение в особенности относится к уровнемеру, то есть устройству измерения уровня заполнения, для определения значений изменчивости эхо-сигналов кривой эхо-сигналов и для выполнения способа отслеживания трассы с учетом по меньшей мере одного из значений изменчивости, использованию такого уровнемера для измерений расположенного на поверхности раздела уровня, способу, элементу программы и машиночитаемому носителю.
УРОВЕНЬ ТЕХНИКИ
В датчиках уровня, которые действуют в соответствии с принципом FMCW (частотно-модулированного непрерывного колебания) или задержки длительности импульса, электромагнитные или акустические волны испускаются в направлении поверхности продукта. Затем датчик регистрирует эхо-сигналы эхо-продуктом, то есть средой заполнения, креплением контейнера и самим контейнером, и выводит местоположение или положение поверхности по меньшей мере одного продукта, расположенного в контейнере, из зарегистрированных эхо-сигналов.
При использовании акустических или оптических волн, сигнал, сформированный уровнемером, обычно свободно распространяется в направлении измеряемой поверхности. В устройствах, которые используют радиолокационные волны для измерения поверхности продукта, радиолокационные волны могут распространяться свободно в направлении измеряемой среды или внутри полого волновода, который направляет радиолокационные волны из датчика к среде. В устройствах, которые работают в соответствии с принципом направляемых микроволн, высокочастотные сигналы направляются к среде вдоль волновода.
Приходящие сигналы отражаются на поверхности измеряемой среды или продукта и вновь достигают уровнемера через соответствующее время пробега. Уровнемер принимает эхо-сигналы в разных местоположениях и определяет расстояние до продукта.
Определенное расстояние до продукта передается во внешнее местоположение. Передача может осуществляться в аналоговой форме, например, посредством интерфейса 4…20 мА, или в цифровой форме, например, посредством протокола промышленной шины (fieldbus).
Способ слежения может использоваться, чтобы группировать эхо-сигналы последовательных кривых эхо-сигналов, которые получаются соответственно из идентичных точек отражения. Однако может быть затруднительным корректно сопоставить эхо-сигнал с определенной трассой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Может быть желательным упростить корректное сопоставление эхо-сигнала с трассой.
Раскрыты уровнемер, применение или использование, способ, программный элемент и машиночитаемый носитель согласно характеристикам независимых пунктов формулы изобретения. Усовершенствования изобретения вытекают из зависимых пунктов формулы изобретения и последующего описания.
Согласно первому аспекту изобретения, раскрыт уровнемер для определения значений изменчивости эхо-сигналов кривой эхо-сигналов и для выполнения способа слежения с учетом по меньшей мере одного из значений изменчивости. Уровнемер характеризуется арифметическим блоком, то есть вычислительным блоком или процессором, который, например, содержит один или более микропроцессоров и предназначен для определения первого значения изменчивости первого эхо-сигнала первой кривой эхо-сигналов с учетом позиционного сдвига первого эхо-сигнала и позиционного сдвига другого эхо-сигнала первой кривой эхо-сигналов. Арифметический блок, кроме того, пригоден для выполнения способа слежения, чтобы группировать эхо-сигналы последовательных кривых эхо-сигналов, которые получаются из идентичных точек отражения.
Арифметический блок дополнительно предназначен для назначения второго эхо-сигнала второй кривой эхо-сигналов, которая получена после первой кривой эхо-сигналов, определенной трассе с учетом по меньшей мере одного значения изменчивости.
Другими словами, уровнемер способен выполнять модифицированный способ слежения, в котором учитывается, изменил ли положение определенный эхо-сигнал в прошлом (например, во время более раннего измерения или между более ранним измерением и измерением, которое имело место до этого более раннего измерения) и, более того, изменил ли положение также другой эхо-сигнал.
При назначении определенного эхо-сигнала (измеряемой в настоящее время кривой эхо-сигналов) определенной трассе, другими словами, можно учитывать информацию о том, переместился ли эхо-сигнал этой трассе во время предыдущего измерения или во время предыдущих измерений. Более того, учитывается, переместился ли другой эхо-сигнал в течение предыдущего измерения или во время предыдущих измерений. Следовательно, два перемещения или позиционных сдвига двух эхо-сигналов взаимосвязаны, и эта связь включена в решение, должен ли эхо-сигнал вновь зарегистрированной кривой эхо-сигналов назначаться определенной трассе, или нет.
Согласно еще одному аспекту изобретения, значение изменчивости (мобильности) эхо-сигнала является параметром для абсолютного перемещения или относительного перемещения эхо-сигнала, который определяется с учетом одновременно происходящего перемещения или перемещений, или позиционных сдвигов или другого изменения (например, расширения, сужения, увеличения амплитуды или уменьшения амплитуды) по меньшей мере одного другого эхо-сигнала.
Позиционный сдвиг эхо-сигнала кривой эхо-сигналов, например, относится к перемещению эхо-сигнала, например, во время получения кривой эхо-сигналов. Это перемещение может детектироваться, например, с помощью доплеровского анализа кривой эхо-сигналов. В дополнение, это перемещение также может рассчитываться посредством различения того, что положения эхо-сигнала или эхо-сигналов идентичного источника отражения сравниваются друг с другом в двух или более последовательных кривых эхо-сигналов.
Согласно еще одному аспекту изобретения, назначение второго эхо-сигнала определенной трассе выполняется посредством использования функции ожидания, посредством которой может рассчитываться вероятность для корректного назначения второго эхо-сигнала определенной трассе. Ширина или дисперсия функции ожидания уменьшается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов является нулевым или незначительным, но позиционный сдвиг другого эхо-сигнала первой кривой эхо-сигналов не равен нулю или значительно больше, чем позиционный сдвиг первого эхо-сигнала.
Следовательно, ширина или дисперсия функции ожидания для второго эхо-сигнала, который должен назначаться трассе, может уменьшаться, если первый эхо-сигнал первой кривой эхо-сигналов не перемещается во время предыдущего измерения, но по меньшей мере один другой эхо-сигнал первой кривой эхо-сигналов перемещается.
Следовательно, если этот первый эхо-сигнал не перемещается за несколько циклов измерения, но перемещение других эхо-сигналов действительно имеет место, ширина функции ожидания для трассы, назначенной этому стационарному первому эхо-сигналу, становится меньше и меньше.
Согласно еще одному аспекту изобретения, функция ожидания является оконной функцией, то есть прямоугольной функцией.
Однако функция ожидания, например, также может быть подобной гауссовой функцией.
Согласно еще одному аспекту изобретения, ширина или дисперсия функции ожидания увеличивается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов не равен нулю или отклоняется от нуля на некоторую величину.
Согласно еще одному аспекту изобретения, ширина или дисперсия функции ожидания увеличивается, если второй эхо-сигнал не достигает минимального расстояния до смежного эхо-сигнала второй кривой эхо-сигналов.
Если второй эхо-сигнал приближается к соседнему эхо-сигналу (или наоборот), ширина или дисперсия функции ожидания, следовательно, может увеличиваться значительнее, чем в случаях, в которых расстояние до смежного эхо-сигнала достигает минимального расстояния.
Согласно еще одному аспекту изобретения, ширина или дисперсия функции ожидания может увеличиваться, если функция ожидания перекрывается с соответствующей функцией ожидания соседнего эхо-сигнала.
Согласно еще одному аспекту изобретения, значение изменчивости первого эхо-сигнала уменьшается, если первый эхо-сигнал не перемещался в предыдущем измерении, но по меньшей мере один другой эхо-сигнал перемещался. Другими словами, значение изменчивости уменьшается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов является нулевым, но позиционный сдвиг другого эхо-сигнала первой кривой эхо-сигналов не равен нулю.
Поэтому можно снижать соответствующее значение изменчивости, а также ширину или дисперсию функции ожидания. Другими словами, неизменные эхо-сигналы «облагаются штрафом дважды».
Согласно еще одному аспекту изобретения, начальные функции ожидания имеют идентичную ширину или дисперсию. Другими словами, функции ожидания, которые назначены эхо-сигналам и/или трассам начальной кривой эхо-сигналов, полученной в начале способа отслеживания трассы, и посредством которых определяется, нужно ли эхо-сигнал полученной затем кривой эхо-сигналов назначать определенной трассе, имеют идентичную ширину или дисперсию.
Затем начинается способ отслеживания трассы, и ширины или дисперсии функций ожидания могут соответствующим образом уменьшаться или увеличиваться в зависимости от того, каким образом эхо-сигналы (а потому, трассы) ведут себя относительно друг друга.
Согласно еще одному аспекту изобретения, раскрыто использование уровнемера типа, описанного выше и ниже, для измерений расположенного на поверхности раздела уровня.
Согласно еще одному аспекту изобретения, раскрыт способ для определения значений изменчивости эхо-сигналов кривой эхо-сигналов и для выполнения способа отслеживания трассы с учетом по меньшей мере одного из значений изменчивости. В этом способе, первое значение изменчивости первого эхо-сигнала первой кривой эхо-сигналов в начале определяется с учетом позиционного сдвига первого эхо-сигнала и позиционного сдвига другого эхо-сигнала первой кривой эхо-сигналов. Затем способ отслеживания трассы выполняется для того, чтобы сгруппировать эхо-сигналы последовательных кривых эхо-сигналов, которые получаются из идентичных точек отражения. Второй эхо-сигнал второй кривой эхо-сигналов, полученной после первой кривой эхо-сигналов, назначается определенной трассе с учетом по меньшей мере первого значения изменчивости.
В дополнение, также может использоваться способ для определения положения расположенного на поверхности раздела уровня и, в частности, характеризующийся следующими этапами:
Прием кривой эхо-сигналов; определение по меньшей мере двух разных эхо-сигналов на кривой эхо-сигналов; определение значения изменчивости по меньшей мере одного эхо-сигнала кривой эхо-сигналов, при этом по меньшей мере один параметр позиционного сдвига этого эхо-сигнала и по меньшей мере один параметр позиционного сдвига другого эхо-сигнала используются для этой цели; выполнение способа отслеживания трассы, чтобы группировать эхо-сигналы идентичных точек отражения, в течение нескольких циклов измерения, при этом по меньшей мере одно значение изменчивости эхо-сигнала или трассы, полученное в предыдущих циклах измерения, используется для этой цели.
Согласно еще одному аспекту изобретения, раскрыт машиночитаемый носитель, на котором хранится элемент программы, который при исполнении на процессоре уровнемера, побуждает процессор выполнять процедурные этапы, описанные выше и ниже.
В этом случае элемент программы, например, может формировать часть программного обеспечения, которое хранится в процессоре уровнемера. Процессор, подобным образом, может формировать предмет изобретения в этом случае. Этот примерный вариант осуществления изобретения, кроме того, содержит элемент компьютерной программы, который уже использует изобретение с начала, а также элемент компьютерной программы, который побуждает существующую программу использовать изобретение в результате обновления (обновление).
Способ может делать возможной реализацию устойчивого отслеживания трассы, особенно в условиях изменяющихся амплитуд и в присутствии ложных эхо-сигналов в контейнере.
Примерные варианты осуществления изобретения описаны ниже со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает устройство для определения положения поверхности продукта в контейнере.
Фиг.2 показывает оценку эхо-сигнала посредством использования способа отслеживания трассы.
Фиг.3 показывает оценку эхо-сигнала для низкого значения DK посредством способа отслеживания трассы.
Фиг.4 показывает оценку эхо-сигнала с определением значений изменчивости.
Фиг.5 показывает отслеживание трассы, при котором выполняется способ стробирования.
Фиг.6 показывает устройство для определения положения поверхности продукта согласно примерному варианту осуществления изобретения.
Фиг.7 показывает способ оценки эхо-сигнала согласно примерному варианту осуществления изобретения.
Фиг.8 показывает блок-схему последовательности операций способа оценки эхо-сигнала согласно примерному варианту осуществления изобретения.
Фиг.9 показывает блок-схему последовательности операций способа стробирования согласно примерному варианту осуществления изобретения.
Фиг.10 показывает результаты отслеживания трассы с учетом изменчивости согласно примерному варианту осуществления изобретения.
Фиг.11A показывает две функции ожидания согласно примерному варианту осуществления изобретения.
Фиг.11B показывает две функции ожидания согласно еще одному примерному варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Чертежи дают схематичные представления, выполненные не в точном масштабе.
В последующем описании чертежей, идентичные или подобные элементы на разных чертежах идентифицированы одинаковыми ссылочными позициями. Однако идентичные или подобные элементы также могут быть идентифицированы разными ссылочными позициями.
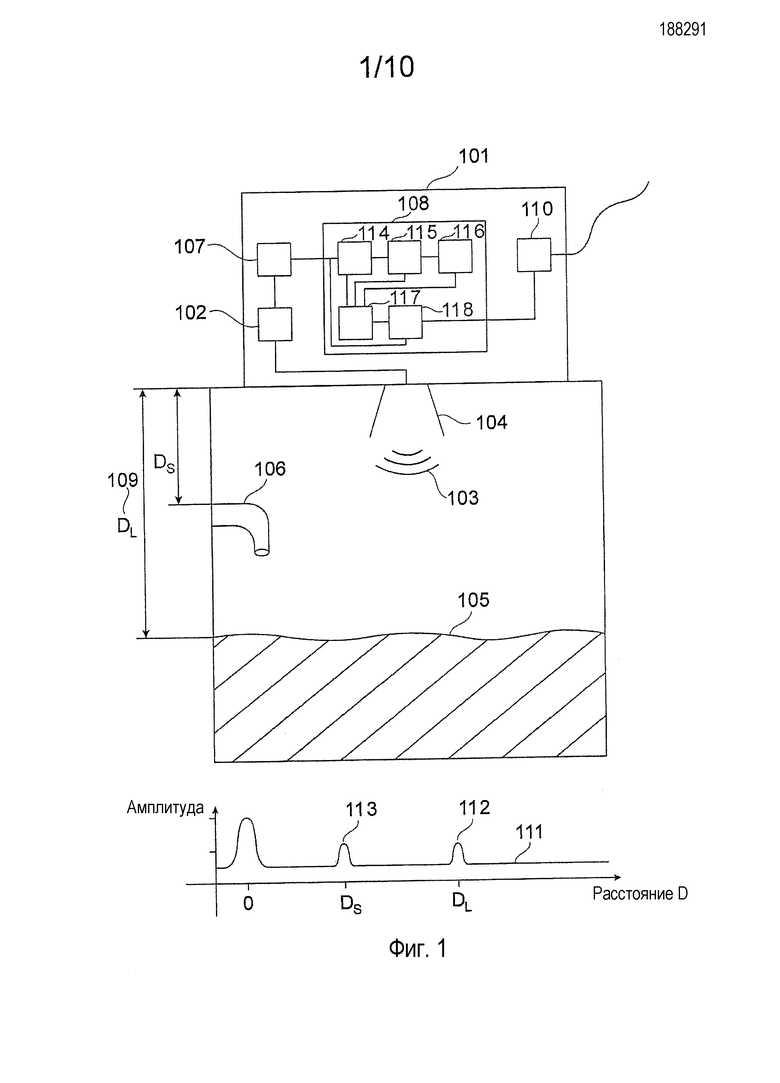
Фиг.1 показывает типичное применение коммерчески доступного уровнемера.
Уровнемер 101 вырабатывает измерительный сигнал 103 с помощью блока 102 формирования сигналов и испускает этот измерительный сигнал в направлении среды 105, подлежащей измерению, через соответствующее устройство 104 передачи/приема или антенну 104. Сам уровнемер может определять расстояние от среды в соответствии с ультразвуковым, радиолокационным, лазерным или направленным микроволновым принципом. Соответственно, ультразвуковые волны, а также электромагнитные волны могут рассматриваться в качестве измерительных сигналов 103.
Среда 105 отражает падающий измерительный сигнал обратно на уровнемер, где он принимается и обрабатывается. Однако излученный сигнал одновременно отражается арматурой контейнера, например, такой как подводящая труба 106.
Измерительные сигналы, принятые через антенну 104, преобразуются в более низкочастотный диапазон промежуточной частоты, например, с помощью блока 102 формирования сигналов, и затем пересылаются в блок 107 аналого-цифрового преобразователя. Блок 107 аналого-цифрового преобразователя оцифровывает принятую кривую эхо-сигналов и делает сканированные значения амплитуды доступными блоку 108 обработки эхо-сигналов.
Блок 108 обработки эхо-сигналов анализирует полученную кривую эхо-сигналов и определяет расстояние D L 109 между уровнемером и поверхностью среды 105, подлежащей измерению, используя предопределенные способы. Определенное расстояние D L 109 пересылается в блок 110 вывода. Определенное значение расстояния дополнительно обрабатывается в этом блоке вывода в соответствии с техническими требованиями пользователя, например, в виде коррекции или посредством принятия во внимание функций линеаризации для компенсации нелинейных геометрических форм контейнера.
Основным компонентом каждого уровнемера является блок 108 обработки эхо-сигналов, который определяет расстояние до поверхности 105 продукта на основании оцифрованной кривой 111 эхо-сигналов.
Кривая 111 эхо-сигналов, выданная в блок 108 обработки эхо-сигналов для этой цели, может характеризовать не только полезный эхо-сигнал 112 или эхо-сигнал 112 продукта, вызванный поверхностью 105 продукта, но также эхо-сигналы постоянно установленных точек 106 интерференции, которые упоминаются ниже как ложные эхо-сигналы 113. Наличие таких ложных эхо-сигналов усложняет определение расстояния до поверхности продукта и является причиной использования сложных способов оценки кривой эхо-сигналов. Устройства, требуемые для выполнения такого способа, также проиллюстрированы на Фиг.1.
На первом процедурном этапе, кривая 111 эхо-сигналов, выданная блоком аналого-цифрового преобразования, анализируется в отношении эхо-сигналов в блоке 108 обработки эхо-сигналов. Для этой цели блок обработки эхо-сигналов характеризуется устройством 114 выделения эхо-сигналов или устройством 114 определения эхо-сигналов. Способы, применяемые в этом блоке обработки, в частности, включают в себя способы из области основанного на пороговых значениях выделения эхо-сигналов или способы на базе основанного на масштабе выделения эхо-сигналов. После завершения способа выделения эхо-сигналов, предоставляется цифровой список эхо-сигналов, который предпочтительно включает в себя информацию о начале, местоположении и конце одного или более эхо-сигналов, содержащихся на кривой эхо-сигналов.
Для того чтобы дополнительно повышать надежность обработки эхо-сигналов уровнемера, детектированные эхо-сигналы вводятся в статистический (архивный) контекст в устройстве 115 отслеживания трассы. Способы, используемые в этом случае, могут соответствовать существующему уровню техники. Например, преимущественно могут применяться способы на основе алгоритма Мункреса. В этом процессе отслеживания трассы, в частности, изменение местоположения эхо-сигнала отслеживается по нескольким отдельным измерениям, и собранная информация представляется в памяти в виде трассы. Собранная статистическая информация о нескольких эхо-сигналах передается во внешнее местоположение в виде одного или более списков трасс.
Достоверность идентификации отражения продукта может быть значительно улучшена посредством оценки изменчивости отдельных эхо-сигналов. В ходе расчета изменчивости, в данном случае, определяется, что эхо-сигнал 112 продукта меняется в отношении местоположения эхо-сигнала (также упоминаемого как положение эхо-сигнала) по нескольким измерениям, в то время как эхо-сигнал 113 отражения на подводящей трубе 106 не меняется в отношении местоположения эхо-сигнала. Устройство 116 оценки изменчивости предоставляет значения изменчивости во внешнее местоположение.
Результаты из устройства 114 выделения эхо-сигналов, устройства 115 отслеживания трассы и устройства 116 оценки изменчивости объединяются в устройстве 117 принятия решения. На основании выданных данных, устройство принятия решения определяет эхо-сигнал текущей кривой эхо-сигналов, который был создан поверхностью продукта, в соответствии с традиционными способами.
Данные идентифицированного эхо-сигнала продукта выдаются в измерительное устройство 118, которое имеет функцию дополнительного улучшения точности измерения уровня. Традиционные способы, например, такие, как способы из области техники интерполяции кривых эхо-сигналов или аппроксимации кривых эхо-сигналов, используются для этой цели.
Процедурные этапы (то есть этапы способа), которые выполняются в пределах объема настоящего изобретения, подробнее описаны ниже со ссылкой на чертежи.
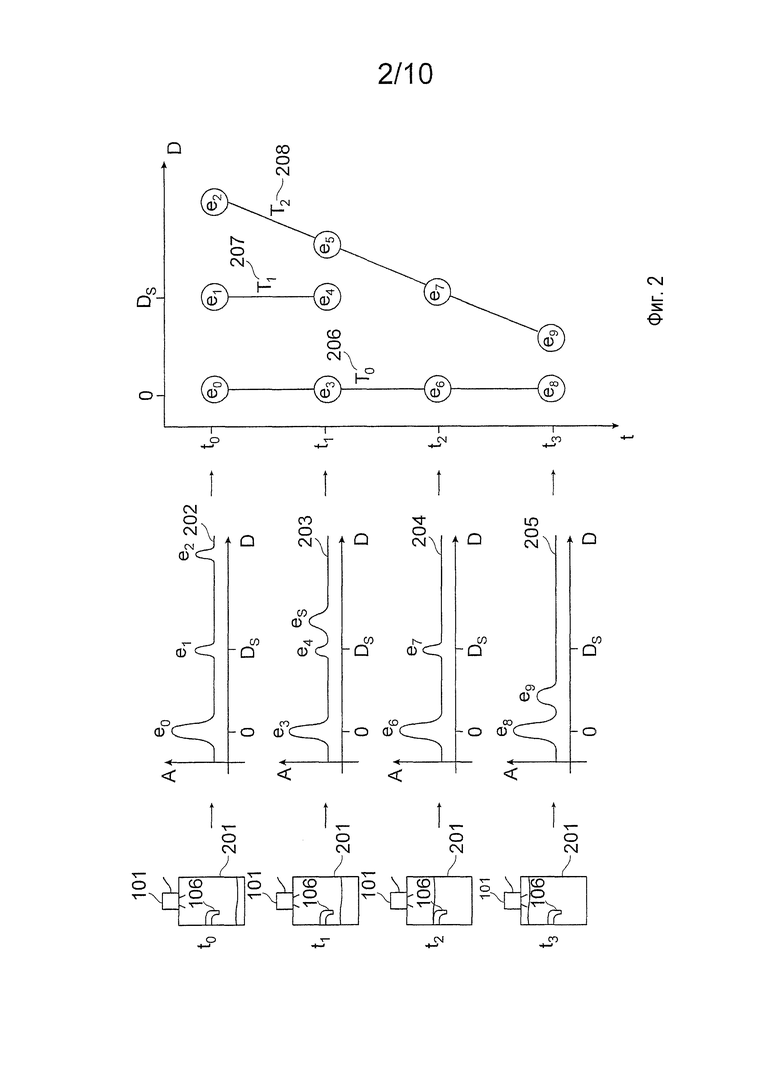
Последовательность принятых кривых эхо-сигналов типа, проиллюстрированного на Фиг.3, получается, если циклы циклического измерения реализуются в уровнемере. В этом примере, четыре независимых цикла измерения проиллюстрированы в пределах соответственных временных интервалов 5 минут. Естественно, также было бы возможным осуществлять значительно более быстрые циклы измерения, например, в пределах временных интервалов 1 секунды.
Проиллюстрированный сценарий показывает условия во время наполнения контейнера 201. Цикл измерения уровнемера 101 начинается в каждый из моментов времени t0, t1, t2 и t3. После приема соответственной кривой 202, 203, 204, 205 эхо-сигналов, она анализируется в отношении эхо-сигналов посредством традиционных способов. Для того чтобы отслеживать изменение местоположения или положения отдельных эхо-сигналов в течение нескольких циклов измерения этого типа, отслеживание трассы детектированных эхо-сигналов выполняется во время дальнейшего хода способа.
В настоящем примере, изменение местоположения эхо-сигналов e0, e3, e6 и e8, которые вызваны самой антенной 104, описано общей трассой T0. В дополнение, изменение местоположения эхо-сигналов e1 и e4, вызванных подводящей трубой 106, описано соответствующей трассой T1. Ход эхо-сигналов, вызванных продуктом 105 в течение нескольких циклов измерения, описан трассой T2, которая состоит из эхо-сигналов e2, e5, e7 и e9.
Во время выполнения алгоритма отслеживания, трассы T0 и T2 инициализируются в момент времени t0 и постепенно наращиваются в моменты времени t1, t2 и t3. Более того, трасса T1 инициализируется в момент времени t0 и наращивается во время процедуры обработки сигналов в момент времени t1.
Иллюстрация хода эхо-сигналов, которые вызваны общей точкой отражения, описывается в форме трассы в профильной литературе и также выгодно используется в других областях техники, например, таких как аэрофотосъемка.
Назначение получаемых текущим образом эхо-сигналов кривой эхо-сигналов трассам, которые уже были получены в более ранних циклах измерения, по существу достигается тем, что определяется различие в отношении местоположения и амплитуды трассы и соответственного эхо-сигнала, и эхо-сигналы назначаются трассе, только если они приблизительно имеют такую же амплитуду и положение, как последние соответствующие параметры трасс.
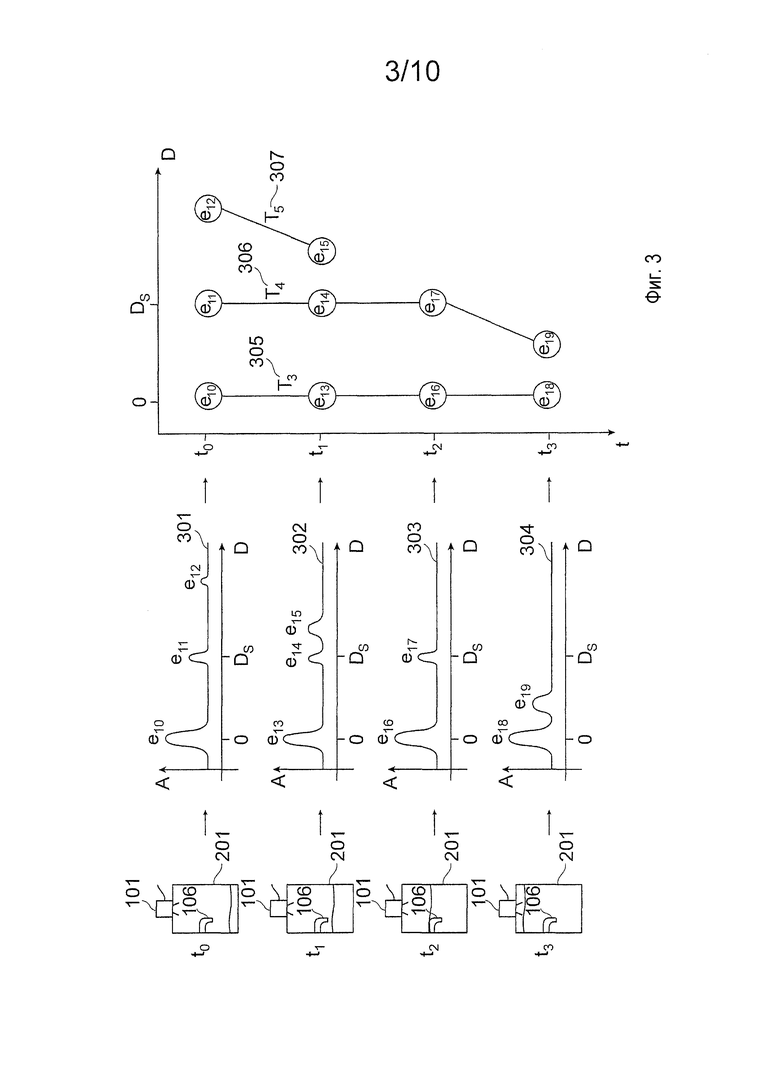
Фиг.3 показывает условия во время наполнения того же самого контейнера жидкостью, которая, в противоположность примеру согласно Фиг.2, имеет значительно более низкое значение DK, а потому значительно более низкую отражательную способность. Значение DK описывает диэлектрическую постоянную среды и также упоминается как диэлектрическая проницаемость. Кривые 301, 302, 303 и 304 эхо-сигналов, полученные в моменты времени с t0 по t3, главным образом, отличаются от соответствующих кривых эхо-сигналов согласно Фиг.2 по той причине, что эхо-сигналы e12, e15, e17 и e19 отражения продукта имеют более низкую амплитуду.
Иллюстрация второй кривой 302 ясно показывает, что эхо-сигнал e15 от поверхности продукта имеет почти такую же амплитуду, как эхо-сигнал e14 подводящей трубы 106.
Вследствие этой совокупности, способ отслеживания трассы, который выполняется традиционно, наталкивается на проблемы с назначением эхо-сигналов идентичных точек отражения существующим ранее трассам. Согласно описанным выше этапам, традиционному устройству 115 отслеживания трассы необходимо решать в момент времени t=t2, должен ли эхо-сигнал e17, идентифицированный в кривой 303, назначаться существующей ранее трассе T3 305, T4 306 или T5 307. Вследствие значительной разницы в местоположении между трассой T3 и эхо-сигналом e17, становится ясно при выполнении традиционных способов отслеживания трассы, что эхо-сигнал может быть назначен только трассе T4 или трассе T5. В профильной технической литературе, этот этап «предварительного выбора» также упоминается как «стробирование». Поскольку текущие значения амплитуды эхо-сигнала e14 (трассы T4) и эхо-сигнала e15 (трассы T5) почти идентичны, решение, какой трассе должен быть назначен эхо-сигнал e17 в данном случае, должно приниматься только на основании наименьшей разницы в местоположении между эхо-сигналом и соответственной трассой. Следовательно, эхо-сигнал e17, а затем также эхо-сигнал e19 ошибочно назначаются трассе T4.
Однако, поскольку эхо-сигналы e17 и e19 были вызваны поверхностью продукта, и трасса T4 должна группировать эхо-сигналы подводящей трубы 106, произошло классическое неправильное назначение, которое существенным образом осложняет дальнейшие этапы оценки, которые основаны на списке трасс.
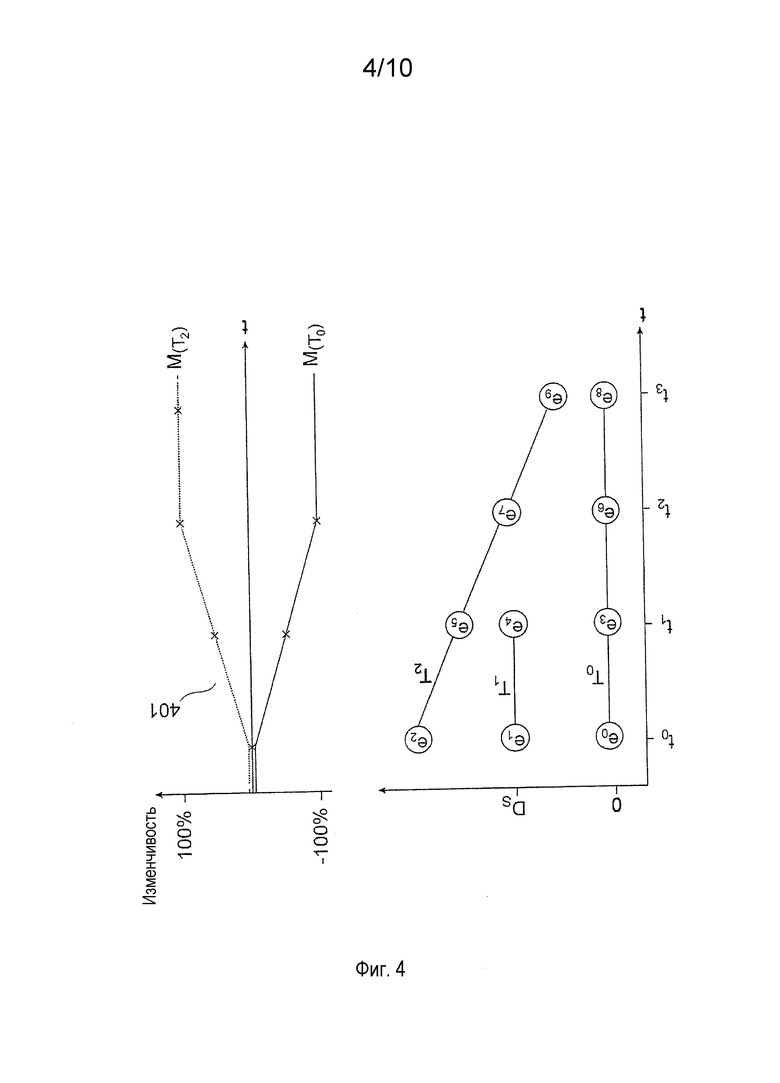
Фиг.4 показывает важный этап во время оценки трасс из списка трасс. Согласно традиционным способам, трассы могут исследоваться в отношении своей изменчивости. Раскрытия в этом отношении, например, могут быть найдены в EP 10156793.1. В противоположность классическому анализу движения, который просто дает информацию о том, какая трасса и/или какой эхо-сигнал изменяет положение, анализ изменчивости также дает возможность получать информацию о том, какая трасса обладает доказанной неизменностью. Иллюстрация согласно Фиг.4 разъясняет этот контекст с помощью списка трасс по Фиг.2.
Трассы T0, T1 и T2 инициализируются в момент времени t=t0. Поскольку все из этих трасс характеризуются лишь одиночным эхо-сигналом, и никакой доплеровской оценки не должно выполняться в данном случае, вообще никакой информации об изменчивости трасс не имеется в соответствующий момент времени. Следовательно, иллюстрация значений 401 изменчивости в момент t=t0 показывает изменчивость 0% для всех трасс. Следует отметить, что изменчивость трасс T1 не проиллюстрирована на чертеже для большей наглядности. В момент времени t=t1, устройство оценки 116 изменчивости обнаруживает, что трасса T2 переместилась за период времени между t0 и t1, а трасса T0 не переместилась совсем за тот же самый период времени. Другими словами, устройство (116) оценки изменчивости определяет, после завершения цикла измерения уровнемера, указанного в момент времени t=t1, что эхо-сигнал e3 трассы T0 имеет позиционный сдвиг, или перемещение ноль, или почти ноль, в то время как эхо-сигнал e5 трассы T2 имеет позиционный сдвиг или перемещение больше ноля. Следовательно, изменчивость M(T2) увеличивается, а изменчивость M(T0) уменьшается. Соответствующие измерительные точки на графике (401) изменчивости проясняют, в момент времени t=t1, что трасса T2 перемещается положительно (изменчивость>0), в то время как трасса T=T0 имеет подтвержденную стационарность (изменчивость<0). Другими словами, трасса T0 (а потому, эхо-сигнал e3, назначенный ей) положительно не перемещается, так как другое перемещение было обнаружено, в то время как она оставалась в своем местоположении. В моменты времени t=t2 и t=t3, полученная информация усиливается в соответствии с вышеупомянутым графиком. Поэтому, становится ясно, что на анализ изменчивости может отрицательно влиять, в отношении эффективности, список ошибочных трасс согласно примеру, проиллюстрированному на Фиг.3.
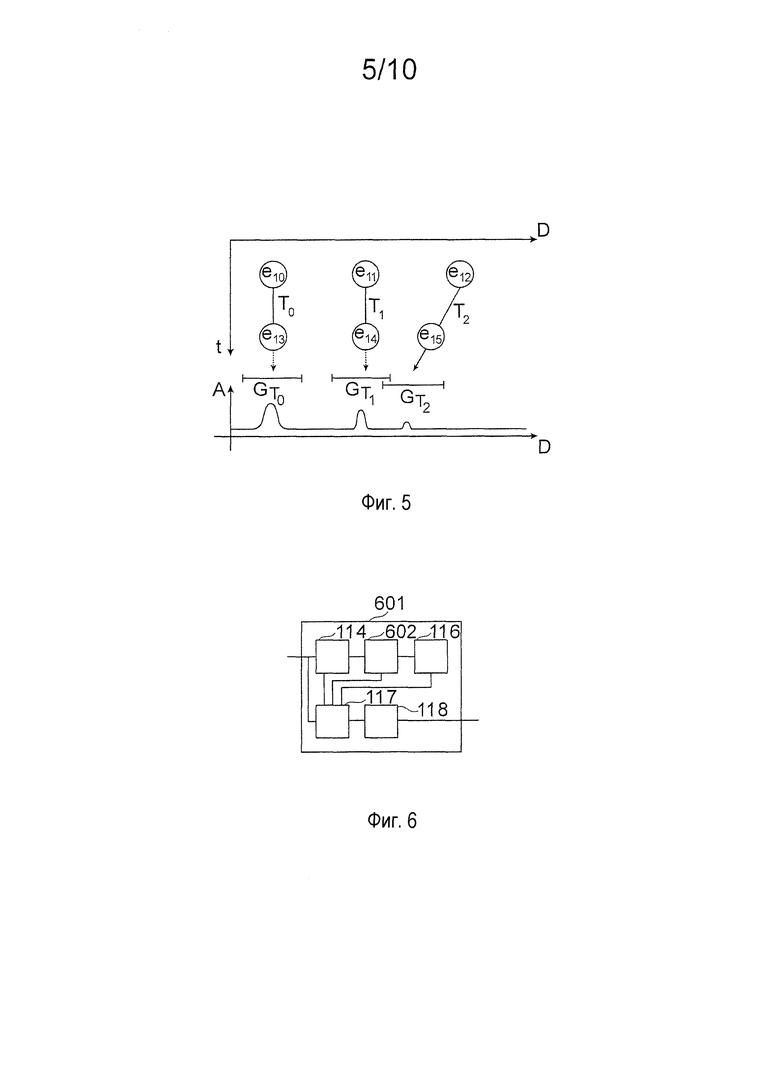
Фиг.5 еще раз проясняет предварительный выбор потенциально следующих один за другим эхо-сигналов трасс, который происходит в устройстве 115 отслеживания трассы и также упоминается как стробирование. Строб трассы определяет позиционный диапазон, в котором должны лежать потенциально следующие один за другим эхо-сигналы трассы. В практической реализации, информация о соответствующем применении, в первую очередь, включена в определение длительности строба. Например, может быть задано, что изменение уровня может иметь максимальную скорость наполнения или опустошения 0,1 м/с. В связи с типичной частотой повторения измерений 1 с между двумя циклами измерения уровнемера, может быть сделан вывод, что потенциально следующему эхо-сигналу необходимо находиться в диапазоне ±10 см вокруг зарегистрированного ранее местоположения трассы. Все эхо-сигналы, которые находятся на большем расстоянии от трассы, больше не рассматриваются в качестве последующего элемента по причинным соображениям.
Фиг.5 показывает пример ситуации отслеживания трассы, в которой также проиллюстрированы стробы GT0, GT1, GT2 трасс T0, T1, T2. Становится ясно, что определение потенциальных последующих элементов трассы может быть значительно ускорено. Более того, становится ясным, что неправильное назначение - как проиллюстрировано на Фиг.3 - не может предотвращаться традиционным стробированием, так как соответствующие стробы перекрываются, когда две трассы сливаются, а следовательно, от амплитудных условий зависит, может ли быть реализовано правильное назначение эхо-сигналов трассам.
Изобретение предоставляет устойчивый к ошибкам способ для отслеживания трассы разных эхо-сигналов. Настоящее изобретение особенно улучшает традиционные алгоритмы отслеживания трассы, когда две трассы пересекаются.
Фиг.6 показывает блок 601 обработки эхо-сигналов, который был модифицирован в соответствии с изобретением и может отличаться от блоков 108, известных до настоящего времени, модифицированным устройством 602 отслеживания трассы.
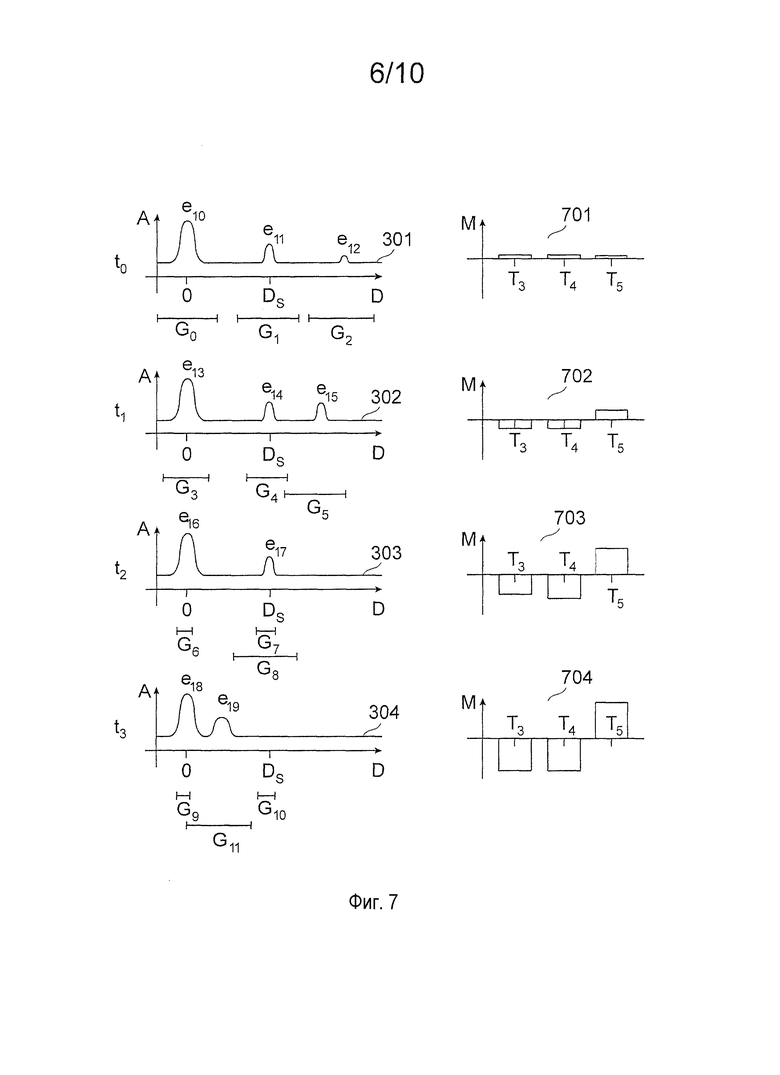
Фиг.7 показывает ход процедуры обработки сигналов с модифицированным блоком 601 обработки сигналов. Эта иллюстрация показывает последовательность 301, 302, 303, 304 кривых эхо-сигналов, которая уже известна из Фиг.3, и дает в результате среды с худшим значением DK. Более того, значения изменчивости, определенные для трасс T3 (305), T4 (306) и T5 (307) на Фиг.3, проиллюстрированы в моменты времени t0, t1, t2 и t3. В момент времени t=t0, трасса T3 (305) инициализируется посредством использования эхо-сигнала e10. Более того, трассы T4 (306) и T5 (307) вновь инициализируются с эхо-сигналами e11 и e12. Устройство 116 оценки изменчивости инициализирует значения изменчивости трех трасс в 0 (701), так что никакой информации о стационарном поведении или перемещении не имеется. В это время соответствующее изобретению устройство отслеживания трассы определяет стробы G0, G1 и G2 в качестве диапазонов ожидания для продолжения трасс.
Еще одна кривая 302 эхо-сигналов получается в момент времени t=t1. Трассы T3, T4 и T5 продолжаются эхо-сигналами e13, e14 и e15. Более того, начальная информация об изменчивости трасс имеется в распоряжении в это время. Соответствующий график 702 изменчивости показывает, что трассы T3 и T4 несомненно имеют стационарное поведение, а трасса T5 перемещается. Другими словами, эхо-сигналы трасс T3, T4 или также трассы T3, T4 имеют отрицательные значения изменчивости, а эхо-сигналы трассы или трасса T5 имеют положительное значение изменчивости. Соответствующее изобретению устройство отслеживания трассы далее рассчитывает длительность новых стробов G3, G4 и G5 посредством использования значений изменчивости трасс. В настоящем примерном варианте осуществления, только отрицательная изменчивость оценивается, так что длительность стробов G3 и G4 уменьшается по сравнению с длительностью стробов G0 и G1. Также было бы возможно использовать положительную изменчивость, чтобы удлинять стробы.
В момент времени t=t2, принимается еще одна кривая эхо-сигналов, эхо-сигналы e16 и e17 которой могут использоваться для продолжения T3 и T4, в соответствии с иллюстраций на Фиг.3. Согласно графику 703 изменчивости, трассы T3 и T4 имеют дополнительно увеличивающуюся отрицательную изменчивость, так что длительности соответствующих стробов G6 и G7 необходимо дополнительно уменьшать в соответствии с изобретением. В противоположность этому, длительность строба G8, принадлежащего трассе 5, остается в изначально заданном значении.
На этой стадии, уже становится ясным, что строб G8 трассы T5 покрывает гораздо больший диапазон, чем строб G7 трассы T4. Данная мера дает возможность эффективно предотвращать «не назначение» стационарных трасс эхо-сигналам с большей разницей в положении.
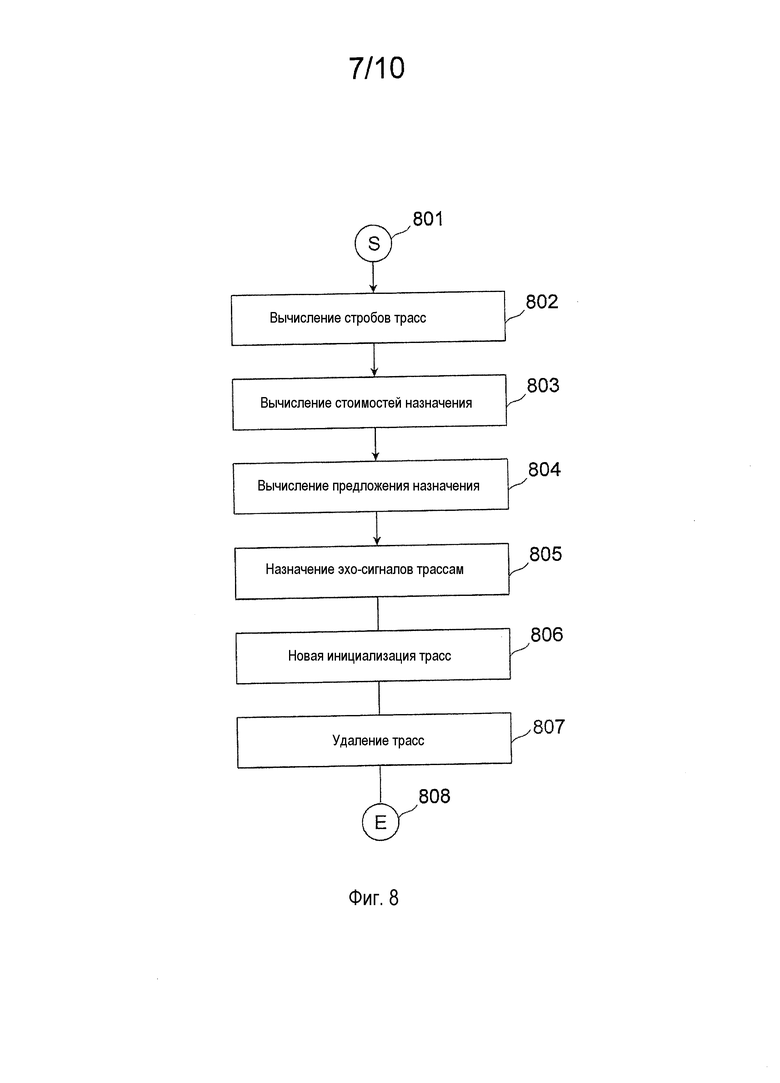
Блок-схема последовательности операций способа по Фиг.8 показывает пример способа отслеживания трассы согласно примерному варианту осуществления настоящего изобретения. Способ, в частности, может быть реализован в соответствующем изобретению устройстве 602 отслеживания трассы. Способ отслеживания трассы начинается в начальном состоянии 801. На этапе 802 вначале определяются границы строба трассы, и стоимости назначения эхо-сигнала трассе рассчитываются для эхо-сигналов, которые лежат в диапазоне строба трассы для трассы. Стоимости назначения являются мерой, которая указывает, насколько хорошо эхо-сигнал соответствует трассе. Стоимости могут рассчитываться в соответствии с традиционными способами, при этом большие различия амплитуд или большие различия в местоположении, в частности, могут приводить к высоким стоимостям.
WO 2009/03700 описывает соответствующие способы. На этапе 804, предложение назначения для продолжения трасс с соответствующими эхо-сигналами предпочтительно рассчитывается посредством алгоритмов глобальной минимизации стоимости. Раскрытия в этом отношении также могут быть найдены в WO 2009/03700. На этапе 805 эхо-сигналы формально переносятся в список трасс. Этапы 806 и 807 служат для новой инициализации трасс с неназначенными эхо-сигналами или удаления трасс, которые больше не продолжаются, например, через соответственно длительное время без назначения. Способ отслеживания заканчивается на этапе 808.
В настоящем примерном варианте осуществления согласно Фиг.7, значения изменчивости отдельных трасс используются для определения стробов которые модифицируются в соответствии с изобретением для трасс на этапе 802.
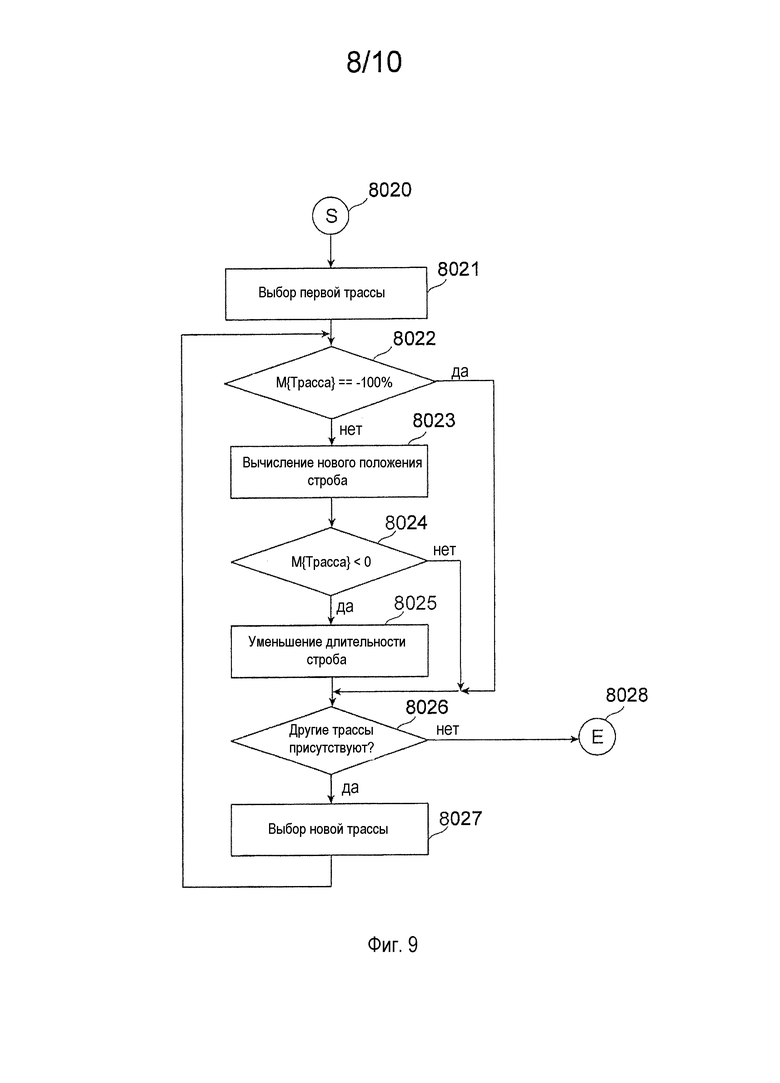
Фиг.9 подробно показывает выполнение способа стробирования согласно настоящему примерному варианту осуществления.
Способ начинается на этапе 8020. На этапе 8021 вначале выбирается первая трасса из списка трасс. На этапе 8022 далее проверяется, является ли трасса положительно неизменной, то есть, идентична ли ее изменчивость -100%, посредством списка изменчивости, предоставленного устройством 116 оценки изменчивости. Если это так, то обновление стробов приостанавливается, и способ продолжается непосредственно со следующей трассой. Иначе, новое положение строба определяется на этапе 8023 с учетом параметризованных или постоянно запрограммированных длительностей стробов. На этапе 8024 проверяется, указывает ли по меньшей мере значение изменчивости текущей трассы стационарные тенденции. Если это так, то длительность строба затем уменьшается в соответствии с изобретением на этапе 8025. Способ заканчивается в конечном состоянии 8028, как только были рассчитаны стробы каждой трассы.
Здесь следует отметить, что учет значений изменчивости в способе отслеживания трассы посредством уменьшения длительности строба для одного или более стробов, представляет одно из предпочтительных изменений. Различные другие формы соответствующего изобретению использования значений изменчивости в устройстве (602) отслеживания трассы также могут приниматься во внимание. Например, расчет стробов может осуществляться классическим способом, но необходимо, чтобы обеспечивалось, что значения изменчивости целенаправленно подавляют отдельные назначения во время расчета стоимостей назначения на этапе (803). Также было бы возможным целенаправленно предотвращать отдельные назначения во время определения предложения назначения на этапе 804. Более того, было бы возможно, чтобы рассмотрение значений изменчивости не реализовывалось до назначения эхо-сигналов трассам на этапе (805), а именно, чтобы только трассы с доказанной неизменностью продолжались надлежащими эхо-сигналами, указанными их местоположением или позицией.
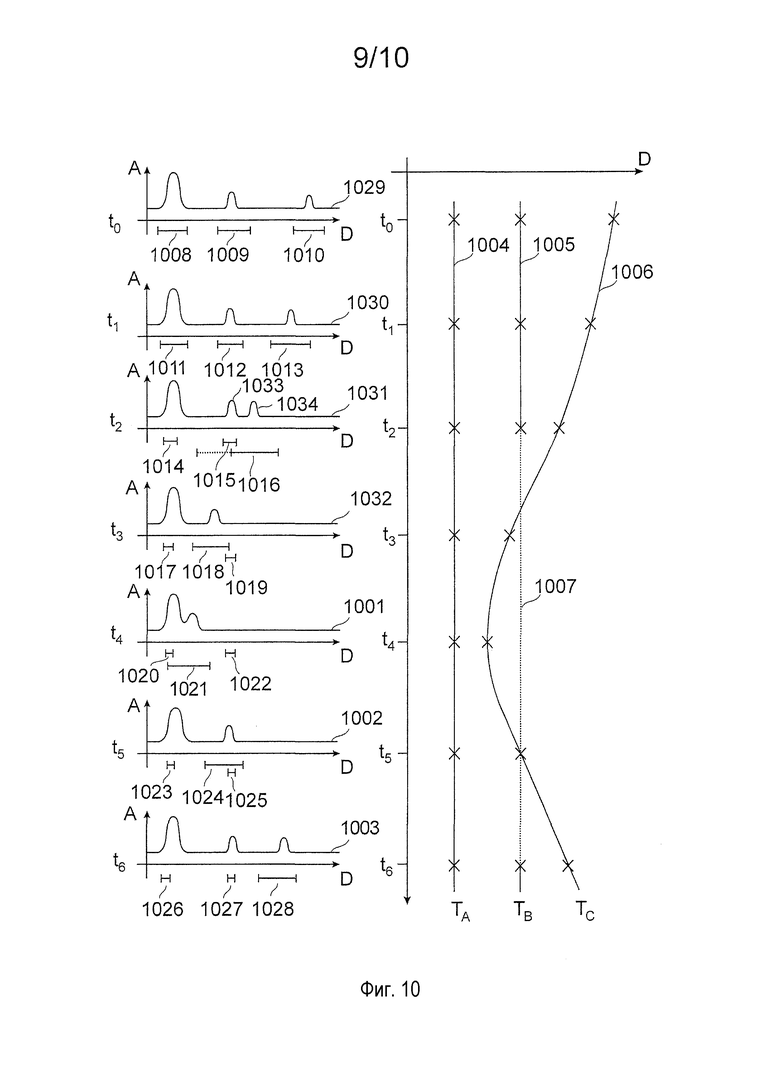
Фиг.10 показывает соответствующий изобретению ход способа отслеживания трассы со ссылкой на пример последовательности кривых согласно Фиг.3. Кривые 1029, 1030, 1031, 1032 и 1001 эхо-сигналов первоначально показывают наполнение контейнера 201. Вследствие изменчивости трасс TC 1006, которая детектирована с увеличивающейся надежностью, и стационарности трасс TA 1004 и TB 1005, 1007 проистекающей из этого, стробы трасс TA и TB 1008, 1009, 1011, 1012, 1014, 1015, 1017, 1019, 1020, 1022, 1023, 1025,1026, 1027 последовательно уменьшаются в отношении своей длительности, при этом целесообразно не достигать минимальной длительности, которая может быть предопределенной. Стробы 1010, 1013, 1016, 1018, 1021, 1024, 1028 трассы TC 1006, которая была достоверно определена в качестве изменчивой, остаются на своей исходной длительности в течение всего времени. Более точно, в цикле измерения в момент времени t=t3 это дает в результате только трассу TC, являющуюся продолжаемой, так как строб 1015 трассы TB надежно подавляет ошибочное назначение. Трасса TB переходит в невидимое состояние 1007 и не продолжается дальше до цикла измерения в момент времени t=t6.
Фиг.10 показывает еще один вариант соответствующего изобретению способа. Когда два эхо-сигнала совпадают (кривая 303), ширина или дисперсия функции стробирования или функции ожидания могут увеличиваться в настоящем примере, если два эхо-сигнала (1033, 1034) не достигают предопределенного минимального расстояния. Вариант, проиллюстрированный прерывистыми линиями, указывает расширение строба 1016 в момент времени t=t2, которое, в частности, может использоваться для надежной идентификации эхо-сигнала продукта при перемещении через область ложного эхо-сигнала.
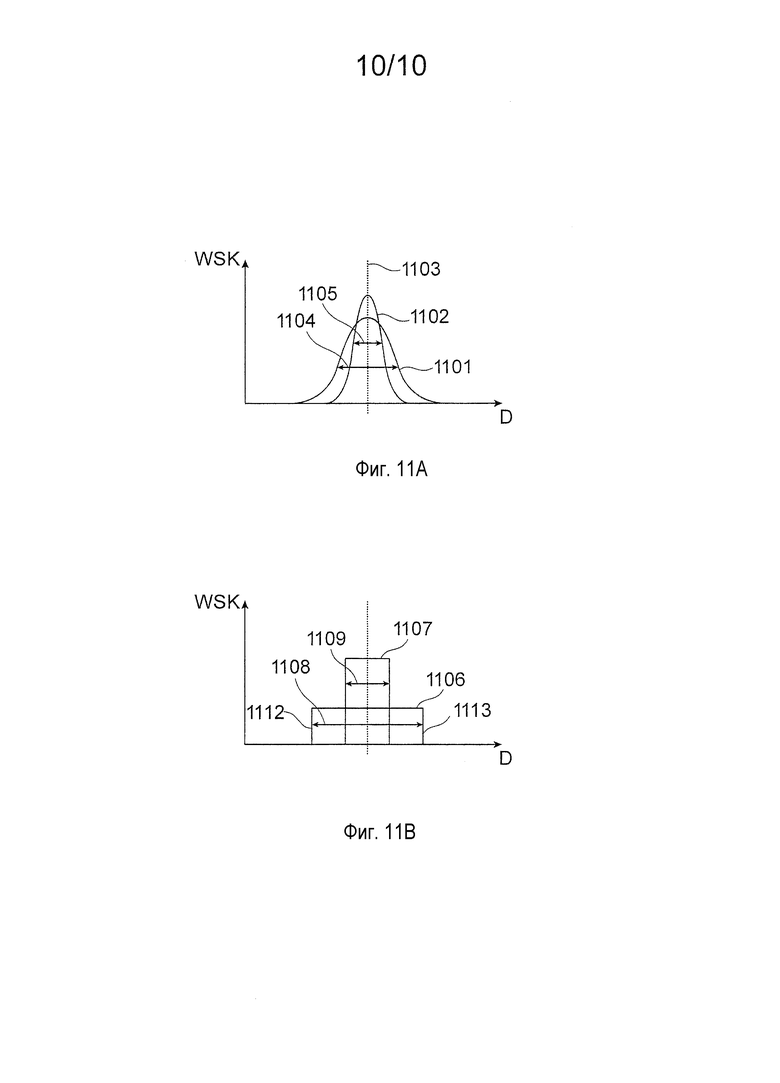
Фиг.11A показывает две функции 1101, 1102 ожидания согласно примерному варианту осуществления изобретения. В этом случае поперечная ось 1110 указывает расстояние от продукта, а вертикальная ось 1111 указывает вероятность эхо-сигнала, который имеет определенное расстояние от уровнемера, подлежащего назначению определенной трассе.
Две функции 1101 и 1102 ожидания, например, имеют гауссову форму и имеют разные ширины. Более пологая функция 1101 ожидания является более широкой (см. стрелку 1104), чем несколько более крутая функция 1102 ожидания (см. стрелку 1105).
Например, значение, которое представляет ширину функции на половине высоты, может использоваться в качестве «ширины» функции ожидания.
Фиг.11B показывает две прямоугольных функции 1106, 1107 ожидания, которые также упоминаются как оконные функции.
В этом случае ширина функции синонимична расстоянию возрастающей левой боковой стороны 1112 от убывающей правой боковой стороны 1113.
Прямоугольные функции 1106, 1107 ожидания, например, могут использоваться для выполнения классического или соответствующего изобретению способа стробирования.
Другие функции 1101, 1102 ожидания, например, могут использоваться для модификации способа для определения затрат для назначения эхо-сигналов трассам в соответствии с изобретением.
Дополнительно, должно быть понятно, что «содержащий» и «включающий в себя в качестве отличительного признака» не исключает любые другие элементы или этапы и что единственное число не исключает множественности. Более того, должно быть понятно, что характеристики или этапы, которые описывались со ссылкой на один из вышеприведенных примерных вариантов осуществления, также могут использоваться в комбинации с другими характеристиками или этапами других вышеописанных примерных вариантов осуществления. Ссылочные позиции в формуле изобретения не должны толковаться в ограничительном смысле.
Предложенная группа изобретений относится к средствам, предназначенным для определения уровня заполнения емкости с учетом изменчивости эхо-сигналов. Уровнемер для определения значений изменчивости эхо-сигналов кривой эхо-сигналов и для выполнения способа отслеживания с учетом по меньшей мере одного из значений изменчивости содержит: блок вычисления для определения первого значения изменчивости первого эхо-сигнала первой кривой эхо-сигналов с учетом позиционного сдвига первого эхо-сигнала и позиционного сдвига другого эхо-сигнала первой кривой эхо-сигналов; при этом блок вычисления дополнительно предназначен для выполнения способа отслеживания, чтобы группировать эхо-сигналы последовательных кривых эхо-сигналов, которые вызваны одной и той же точкой отражения; при этом блок вычисления назначает второй эхо-сигнал второй кривой эхо-сигналов, которая получена после первой кривой эхо-сигналов, определенной трассе с учетом изменчивости. Указанный уровнемер реализует соответствующий способ для определения значений изменчивости эхо-сигналов кривой эхо-сигналов. Также заявлен машиночитаемый носитель, на котором хранится элемент программы для выполнения такого способа. 4 н. и 8 з.п. ф-лы, 12 ил.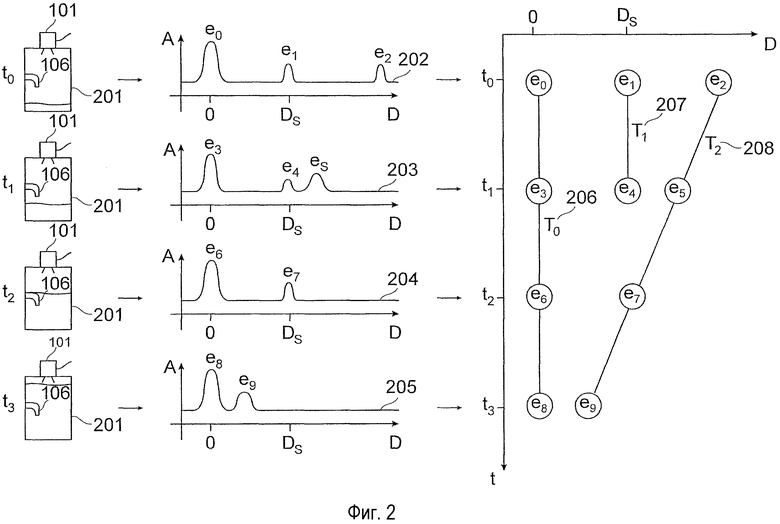
1. Уровнемер для определения значений изменчивости эхо-сигналов кривой эхо-сигналов и для выполнения способа отслеживания с учетом по меньшей мере одного из значений изменчивости, причем уровнемер содержит:
блок вычисления для определения первого значения изменчивости первого эхо-сигнала первой кривой эхо-сигналов с учетом позиционного сдвига первого эхо-сигнала и позиционного сдвига другого эхо-сигнала первой кривой эхо-сигналов;
при этом блок вычисления дополнительно предназначен для выполнения способа отслеживания, чтобы группировать эхо-сигналы последовательных кривых эхо-сигналов, которые вызваны одной и той же точкой отражения;
при этом блок вычисления назначает второй эхо-сигнал второй кривой эхо-сигналов, которая получена после первой кривой эхо-сигналов, определенной трассе с учетом по меньшей мере одного значения изменчивости.
2. Уровнемер по п.1,
в котором значение изменчивости эхо-сигнала является параметром для перемещения эхо-сигнала, которое определяется с учетом одновременного происходящих перемещений или других изменений по меньшей мере одного другого эхо-сигнала.
3. Уровнемер по п.1 или 2,
в котором назначение второго эхо-сигнала определенной трассе осуществляется посредством использования функции ожидания, посредством которой может рассчитываться вероятность правильного назначения второго эхо-сигнала определенной трассе;
при этом ширина или дисперсия функции ожидания уменьшается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов является нулевым, но позиционный сдвиг другого эхо-сигнала первой кривой эхо-сигналов не равен нулю.
4. Уровнемер по п.3,
в котором функция ожидания состоит из оконной функции.
5. Уровнемер по п.3,
в котором ширина или дисперсия функции ожидания увеличивается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов не равен нулю.
6. Уровнемер по п.4 или 5,
в котором ширина или дисперсия функции ожидания увеличивается, если второй эхо-сигнал не достигает минимального расстояния до соседнего эхо-сигнала второй кривой эхо-сигналов.
7. Уровнемер по п.6,
в котором ширина или дисперсия функции ожидания увеличивается, если функция ожидания перекрывается с соответствующей функцией ожидания соседнего эхо-сигнала.
8. Уровнемер по любому из пп.1, 2, 4, 5, 7,
в котором значение изменчивости второго эхо-сигнала уменьшается, если позиционный сдвиг первого эхо-сигнала первой кривой эхо-сигналов является нулевым, но позиционный сдвиг другого эхо-сигнала первой кривой эхо-сигналов не равен нулю.
9. Уровнемер по любому из пп.1, 2, 4, 5, 7,
в котором функции ожидания, назначенные эхо-сигналам начальной кривой эхо-сигналов, которая получена в начале способа отслеживания и посредством которых определяется, нужно ли эхо-сигнал полученной затем кривой эхо-сигналов назначать определенной трассе, имеют идентичные ширины или дисперсии.
10. Использование уровнемера по любому из предыдущих пунктов для измерений расположенного на поверхности раздела уровня.
11. Способ для определения значений изменчивости эхо-сигналов кривой эхо-сигналов для выполнения способа отслеживания с учетом по меньшей мере одного из значений изменчивости, причем упомянутый способ характеризуется следующими этапами, на которых:
определяют первое значение изменчивости первого эхо-сигнала первой кривой эхо-сигналов с учетом позиционного сдвига первого эхо-сигнала и позиционного сдвига другого эхо-сигнала первой кривой эхо-сигналов;
выполняют способ отслеживания, чтобы группировать эхо-сигналы последовательных кривых эхо-сигналов, которые вызваны идентичными точками отражения;
назначают второй эхо-сигнал второй кривой эхо-сигналов, которая получена после первой кривой эхо-сигналов, определенной трассе с учетом по меньшей мере одного значения изменчивости.
12. Машиночитаемый носитель, на котором хранится элемент программы, который при исполнении на процессоре уровнемера побуждает процессор выполнять способ по п.11.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ТЕРМОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА ЗАХОЛАЖИВАНИЯ ГАЗА | 1999 |
|
RU2148219C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

