Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) различных типов (обзорных, многофункциональных и др.), оснащенных выносными пассивными модулями, для решения задачи селекции целей на фоне многократных ответно-импульсных помех, воздействующих по главному лепестку диаграммы направленности (ДН) антенной решетки (АР).
Одним из эффективных способов радиоэлектронного подавления импульсных РЛС является применение многократных ответно-импульсных помех (МОИП), осуществляемое постановщиками активных помех (ПАП) [1-4]. Как правило, МОИП представляют собой серию разомкнутых импульсов, излучаемых в ответ на прием каждого либо выборочного количества зондирующих импульсов подавляемой РЛС. При этом такая помеха создает на выходе подсистемы первичной обработки радиолокационной информации (РЛИ) и на экране индикатора РЛС целеподобные отметки как запаздывающие, так и опережающие целевой эхо-сигнал по временной задержке. Высокая эффективность применения МОИП обеспечивается при их постановке по главному лепестку ДН АР, что существенно затрудняет обнаружение целевых эхо-сигналов. В этих условиях трудности обнаружения, координатных измерений и сопровождения истинных целей усугубляет фактор обнаружения и завязки множества ложных трасс, что обуславливает перегрузку соответствующих информационных каналов РЛС [1-4].
Применение известных способов селекции импульсных помех, основанных на использовании различий временной и (или) частотной структуры импульсов помехи и целевых эхо-сигналов [5 - с. 132-147, 6 - с. 281-289], для решения рассматриваемой задачи не эффективно, так как сигнал МОИП представляет собой копию отраженного сигнала. Так как в настоящее время при проектировании перспективных РЛС большое внимание уделяется оснащению их выносными пассивными модулями (ВПМ), предназначенными для работы совместно с активной РЛС - активным радиолокационным модулем (АРЛМ), то более конструктивным является реализация способов селекции с использованием методов определения местоположения (ОМП) источников радиоизлучения (ИРИ) в многопозиционных радиолокационных системах (МПРЛС).
Известным методом определения местоположения ИРИ в МПРЛС является угломерно-разностно-дальномерный (УРД) метод [7 - с. 494-506, 8 - с. 5-20]. При использовании данного метода достигается наибольшая эффективность обнаружения ИРИ и точность определения их координат при наименьшем количестве баз.
УРД метод ОМП включает корреляционный способ определения разности расстояний до ИРИ относительно разнесенных приемных модулей, выбранный в качестве прототипа [7 - с. 494-506].
Корреляционный способ определения разности расстояний до ИРИ относительно разнесенных приемных модулей заключается в последовательном выполнении следующих операций:
1. Расчет взаимнокорреляционной функции (ВКФ) сигналов принятых разнесенными приемными модулями:

где  - сигнал принятый АРЛМ;
- сигнал принятый АРЛМ;
 - сигнал принятый ВПМ;
- сигнал принятый ВПМ;
 - время зондирования одного углового направления;
- время зондирования одного углового направления;
 - рассогласование по времени.
- рассогласование по времени.
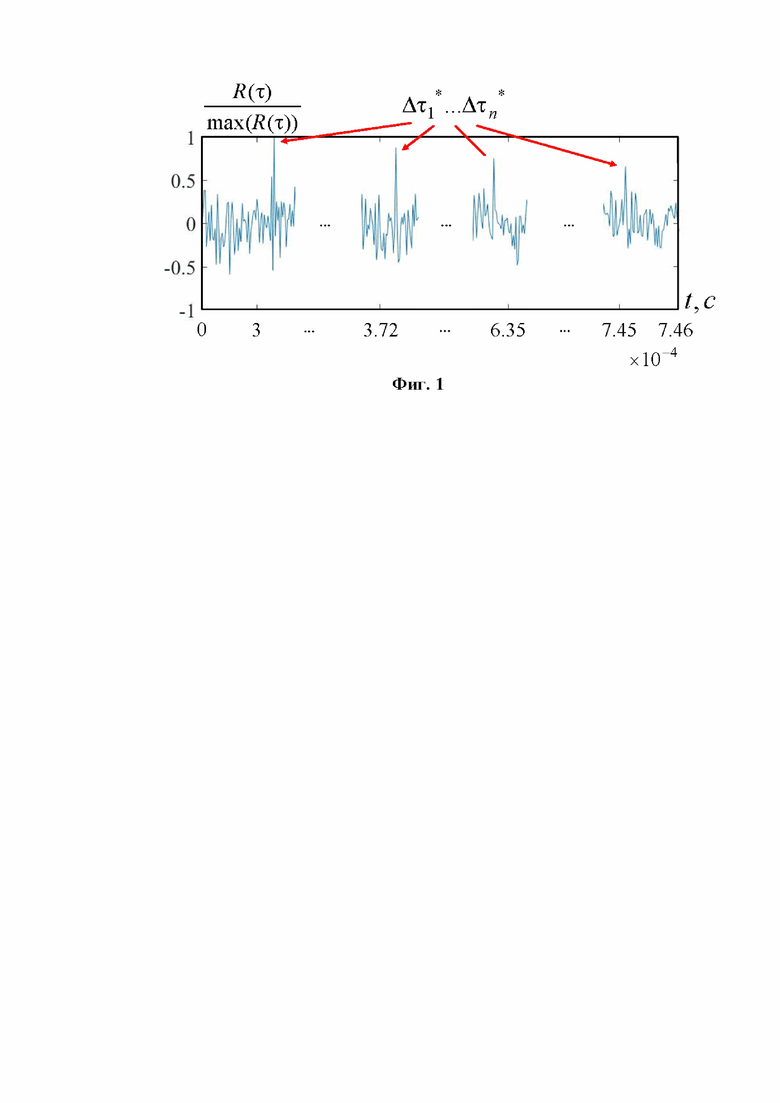
Нормированная ВКФ сигналов, полученная таким образом, показана на фиг. 1.
1. Пороговая обработка ВКФ, которая заключается в поиске ее максимума:

где  - разность времени распространения сигналов до ИРИ относительно разнесенных приемных модулей;
- разность времени распространения сигналов до ИРИ относительно разнесенных приемных модулей;
 - множество возможных значений
- множество возможных значений  .
.
Положение максимума ВКФ соответствует разности расстояний до ИРИ относительно разнесенных приемных модулей (АРЛМ и ВПМ на фиг. 2):

где  - разность расстояний до ИРИ относительно АРЛМ и ВПМ;
- разность расстояний до ИРИ относительно АРЛМ и ВПМ;
 - скорость света.
- скорость света.
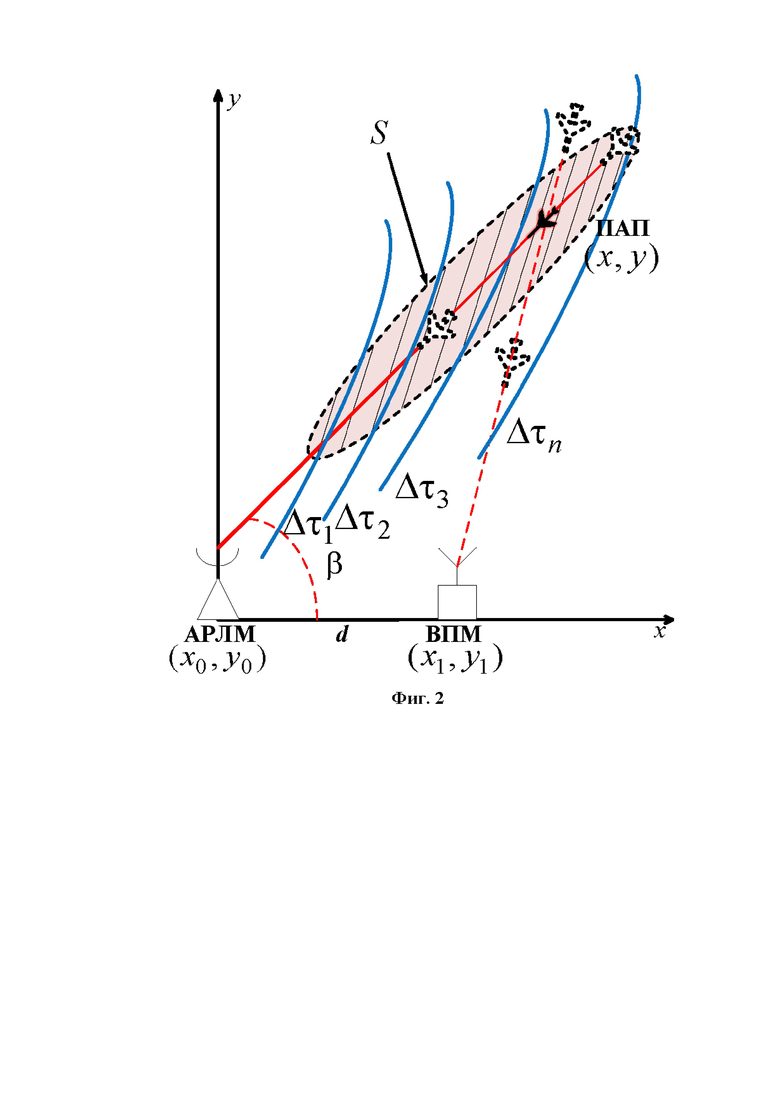
Измеренному значению разности расстояний соответствует линия положения (ЛП) - гипербола (см. фиг. 2).
Данные измерения могут быть использованы для селекции целей на фоне МОИП путем выделения области местоположения постановщика многократных ответно-импульсных помех (ПАП на фиг. 2). Область местоположения ПАП определяется областью пересечений ЛП, например, для УРД метода - прямой и гиперболы (см. фиг. 2).
Реализация методов ОМП, в том числе УРД метода, предполагает, что каждый элемент МПРЛС является РЛС решающей задачи обнаружения целевых и помеховых сигналов. Однако, в рассматриваемой активно-пассивной МПРЛС, выносные пассивные модули оснащаются малоразмерными слабонаправленными антенными решетками и используются для защиты от активных шумовых помех. Это приводит к тому, что при обнаружении МОИП отношение сигнал/шум (ОСШ) на выходе приемных устройств ВПМ недостаточно для решения задачи обнаружения с требуемыми показателями качества.
Малое ОСШ на выходе приемных устройств ВПМ и конечные пределы интегрирования в выражении (1) приводят к тому, что при расчете разности расстояний, положение максимума ВКФ определяется не по целевым сигналам, а по шумовым выбросам (см. фиг.1). Как следствие, недостаток выбранного в качестве прототипа способа заключается в том, что результат взаимнокорреляционной обработки сигналов принятых АРЛМ и ВПМ не позволяет однозначно определить разность расстояний до постановщика МОИП (n - количество неоднозначных измерений разности времени распространения сигналов см. фиг. 1). В итоге область пересечения ЛП увеличивается и затрудняется выделение области местоположения постановщика многократных ответно-импульсных помех. Область возможных пересечений ЛП обозначена S на фиг. 2.
Техническим результатом является обеспечение возможности однозначного определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе.
Технический результат достигается тем, что в способе определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе, который заключается в расчете взаимнокорреляционной функции сигналов принятых разнесенными приемными модулями и поиске ее максимума, согласно изобретения, перед расчетом взаимнокорреляционной функции сигналов принятых разнесенными приемными модулями производится их обработка в согласованном с зондирующим сигналом фильтре и перемножение с временными стробами, формируемыми с использованием оценок временной задержки сигналов первичного обнаружения и угловых координат постановщика активных помех, полученных в активном радиолокационном модуле, а так же с учетом геометрии многопозиционной радиолокационной системы.
Физическая суть предлагаемого способа заключается в следующем.
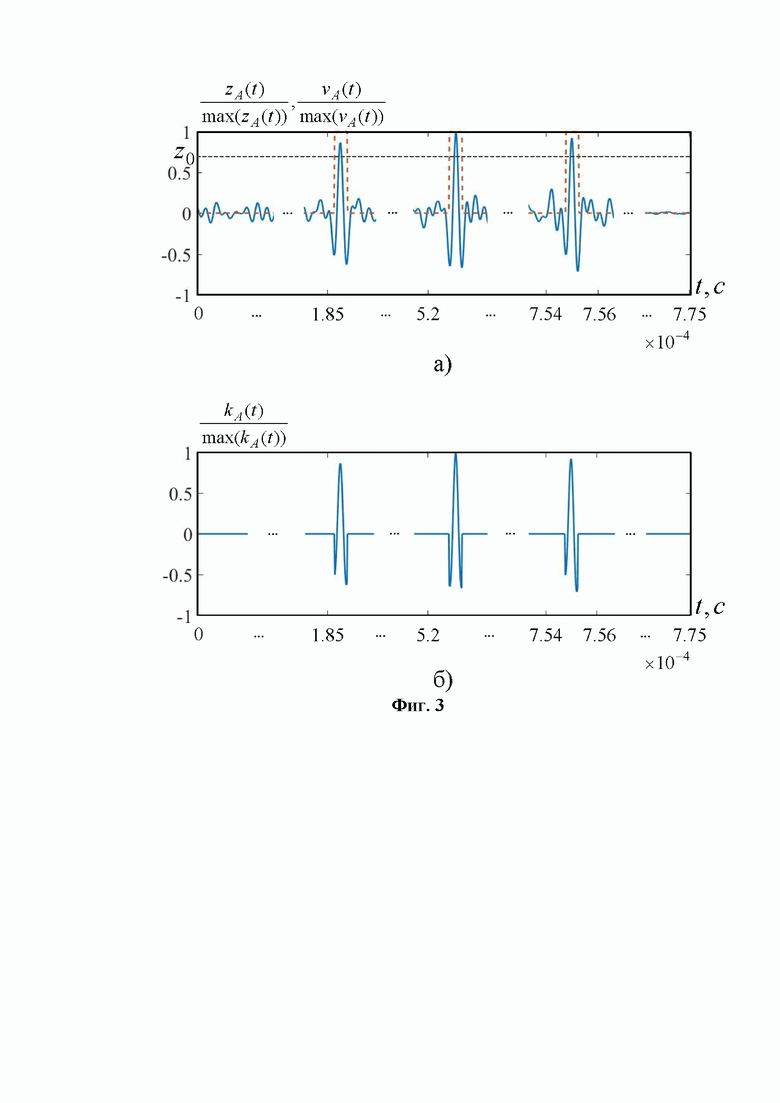
Между разомкнутыми импульсными элементами МОИП объективно существуют свободные от помех межимпульсные интервалы (фиг. 3а). Указанные интервалы являются неинформативными, так как преимущественно содержат собственный шум приемных устройств, что в свою очередь уменьшает ОСШ на выходе приемных устройств разнесенных приемных модулей и ухудшает качество ВКФ. Поэтому для уменьшения влияния собственного шума на качество ВКФ сигналы с выходов приемных устройств разнесенных приемных модулей необходимо обрабатывать в согласованном с зондирующим сигналом фильтре и стробировать по времени существования локальных максимумов фильтровых откликов. При этом операции согласованной фильтрации и стробирования необходимо проводить для сигналов принимаемых АРЛМ и ВПМ.
Обработка сигналов принятых разнесенными приемными модулями в согласованном с зондирующим сигналом фильтре осуществляется с использованием выражений:


где  ,
,  - профильтрованные сигналы принятые АРЛМ и ВПМ соответственно;
- профильтрованные сигналы принятые АРЛМ и ВПМ соответственно;
 - импульсная характеристика согласованного фильтра.
- импульсная характеристика согласованного фильтра.
Под стробированием сигналов понимается их временное выделение путем перемножения локальных максимумов профильтрованных сигналов с временными стробами прямоугольной формы, осуществляемое с использованием выражений:


где  ,
,  - результат стробирования сигналов принятых АРЛМ и ВПМ соответственно;
- результат стробирования сигналов принятых АРЛМ и ВПМ соответственно;
 ,
,  - функция стробирования для сигналов принятых АРЛМ и ВПМ соответственно.
- функция стробирования для сигналов принятых АРЛМ и ВПМ соответственно.
Результат согласованной обработки сигналов принятых АРЛМ позволяет обнаруживать целевые и помеховые сигналы и эффективно их стробировать (см. фиг. 3а). Положение временных стробов вычисляется с использованием оценок временной задержки сигналов первичного обнаружения, полученных в АРЛМ:

где  - уровень порога обнаружения.
- уровень порога обнаружения.
Нормированное значение функции полученной с использованием выражения (6) показано на фиг. 3б.
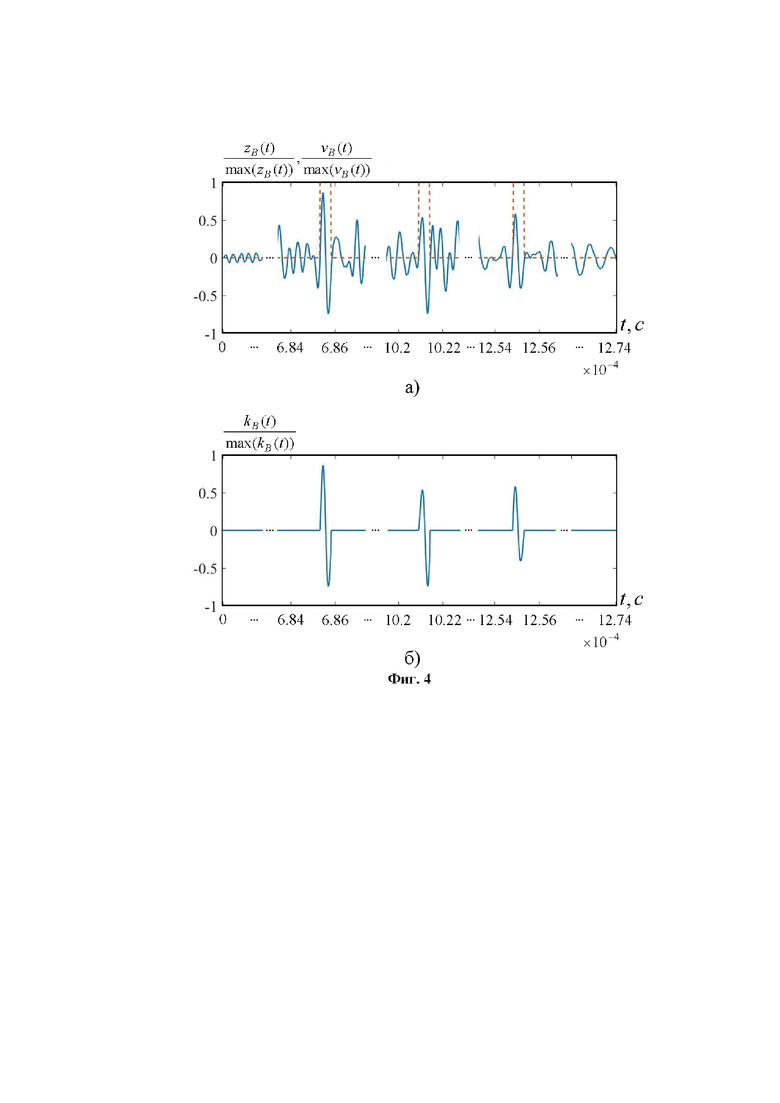
Результат согласованной обработки сигналов принятых ВПМ не позволяет обнаруживать целевые и помеховые сигналы и соответственно их стробировать (см. фиг. 4а). Поэтому положение временных стробов для сигналов, принимаемых ВПМ, вычисляется с использованием оценок временной задержки сигналов первичного обнаружения и угловых координат ПАП, полученных в АРЛМ, а так же с учетом известной геометрии МПРЛС.
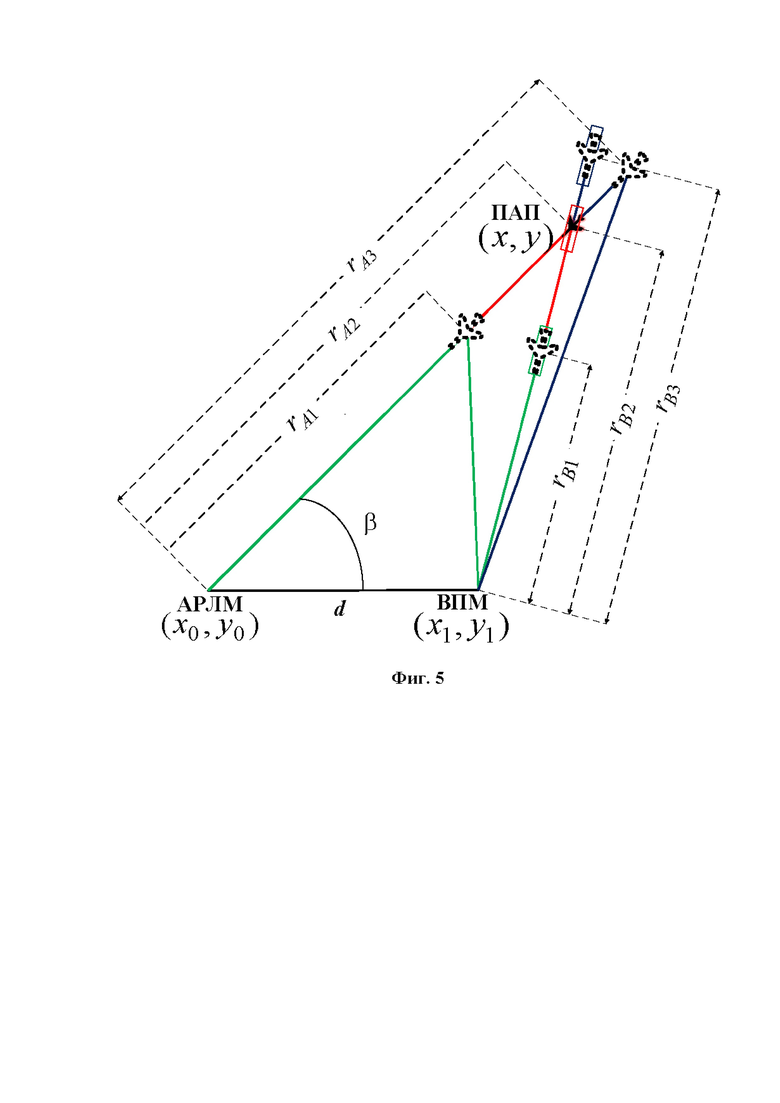
На фиг. 5 показан принцип вычисления положения временных стробов для выделения сигналов принятых ВПМ. Так как расстояние до ПАП много больше расстояния между АРЛМ и ВПМ, то, рассматривая треугольники, в которых в качестве основания выступает база, а вершинами являются точки местоположения цели (ответной помехи), положение временных стробов можно вычислить с использованием тригонометрических уравнений:



где  - оценки временной задержки до g-го сигнала относительно ВПМ;
- оценки временной задержки до g-го сигнала относительно ВПМ;
 - длительность временных стробов;
- длительность временных стробов;
 - оценки расстояний до g-го сигнала относительно ВПМ;
- оценки расстояний до g-го сигнала относительно ВПМ;
 - оценки расстояний до g-го сигнала относительно АРЛМ;
- оценки расстояний до g-го сигнала относительно АРЛМ;
 - номер импульсного элемента МОИП;
- номер импульсного элемента МОИП;
 - количество импульсных элементов МОИП.
- количество импульсных элементов МОИП.
Нормированное значение функции полученной с использованием выражения (7) показано на фиг. 4б.
Профильтрованные сигналы с выходов разнесенных приемных модулей после их стробирования (см. фиг. 3б и фиг. 4б.) далее используются для расчета ВКФ. Модель соответствующей ВКФ, описывается выражением:

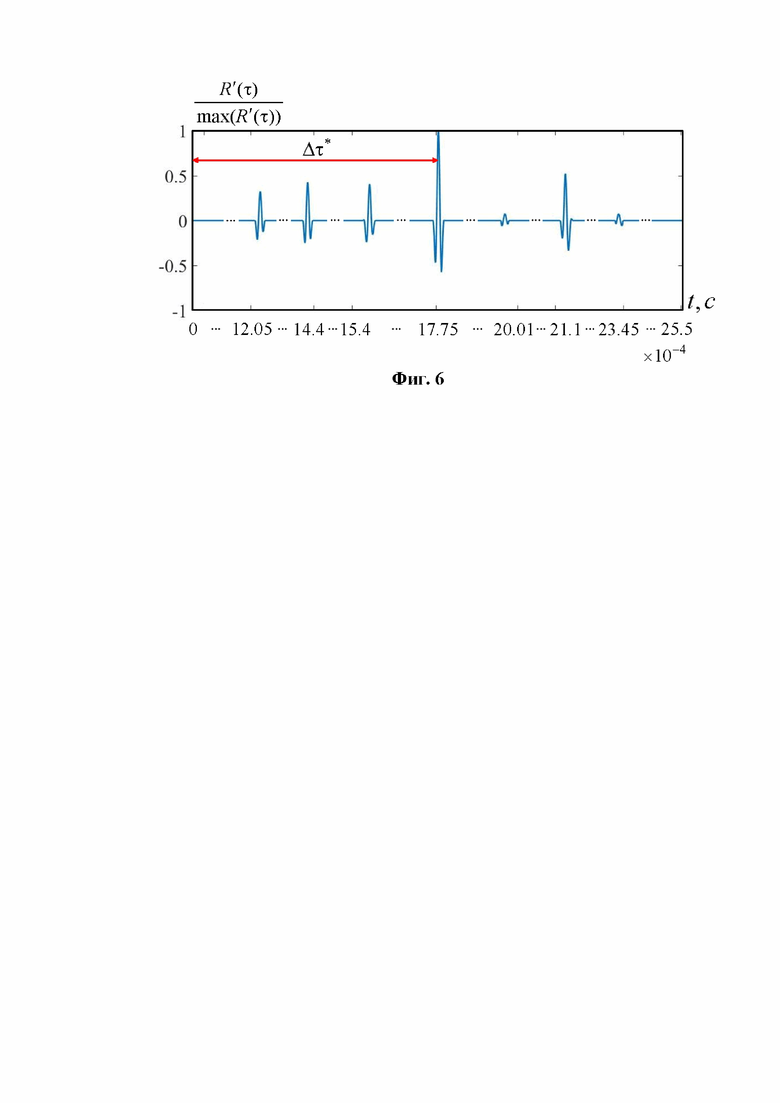
Нормированная ВКФ сигналов принятых разнесенными приемными модулями предварительно прошедших операции согласованной фильтрации и стробирования представлена на фиг. 6. Единственный корреляционный пик позволяет однозначно определить разность времени распространения сигналов.
Оценка разности времени распространения сигналов проводится по максимуму ВКФ:

Единственный максимум ВКФ обусловлен тем, что импульсы МОИП излучаются из одной точки пространства - местоположения ПАП, поэтому разности времени распространения сигналов всех импульсных элементов МОИП и отраженного от ПАП одинаковые.
Таким образом, однозначность измерения разности времени распространения сигналов и комбинация данных измерений с угломерными приведет к уменьшению области пересечения ЛП и позволит определить местоположение постановщика МОИП.
Изобретение иллюстрируется следующими чертежами.
На фиг.1 показана нормированная ВКФ сигналов принятых разнесенными модулями. С использованием обозначений  показаны шумовые выбросы ВКФ, приводящие к неоднозначным измерениям разности расстояний до ПАП относительно разнесенных приемных модулей.
показаны шумовые выбросы ВКФ, приводящие к неоднозначным измерениям разности расстояний до ПАП относительно разнесенных приемных модулей.
На фиг.2 показана геометрия многопозиционной радиолокационной системы. На фиг.2 приняты следующие обозначения: АРЛМ - активный радиолокационный модуль; ВПМ - выносной пассивный модуль; ПАП - постановщик активных помех; (x0, y0), (x1, y1), (x, y) - координаты АРЛМ, ВПМ и ПАП соответственно; d - длина базы; β - азимут на ПАП; Δτ1…Δτn - неоднозначные измерения разности времени распространения сигналов до ПАП относительно АРЛМ и ВПМ; S - область возможных пересечений ЛП.
На фиг. 3 показано нормированное значение результата согласованной обработки и стробирования сигналов принятых АРЛМ: фиг. 3а - результат обработки сигналов принятых АРЛМ в согласованном с зондирующим сигналом фильтре, а также штриховыми линиями поясняется порядок назначения временных стробов; фиг. 3б - результат перемножения сигналов, обработанных в согласованном с зондирующим сигналом фильтре, с временными стробами прямоугольной формы.
На фиг. 4 показано нормированное значение результата согласованной обработки и стробирования сигналов, принятых ВПМ: фиг. 4а - результат обработки сигнала принятого ВПМ в согласованном с зондирующим сигналом фильтре, а также штриховыми линиями поясняется порядок назначения временных стробов; фиг. 4б - результат перемножения сигналов, обработанных в согласованном с зондирующим сигналом фильтре, с временными стробами прямоугольной формы.
На фиг. 5 показана геометрия многопозиционной радиолокационной системы с пояснением принципа вычисления положения временных стробов для выделения сигналов принятых ВПМ. На фиг. 5 приняты следующие обозначения: АРЛМ - активный радиолокационный модуль; ВПМ - выносной пассивный модуль; ПАП - постановщик активных помех; (x0, y0), (x1, y1), (x, y) - координаты АРЛМ, ВПМ и ПАП соответственно; d - длина базы; β - азимут на ПАП; rA1…rA3 - оценки дальности до сигналов первичного обнаружения, полученные в АРЛМ; rB1…rB3 - оценки дальности до сигналов первичного обнаружения, пересчитанные для ВПМ.
На фиг. 6 показана нормированная ВКФ сигналов принятых разнесенными приемными модулями предварительно прошедших операции согласованной фильтрации и стробирования. С использованием обозначения  показано положение максимума ВКФ, позволяющее однозначно определить разность расстояний до ПАП относительно АРЛМ и ВПМ.
показано положение максимума ВКФ, позволяющее однозначно определить разность расстояний до ПАП относительно АРЛМ и ВПМ.
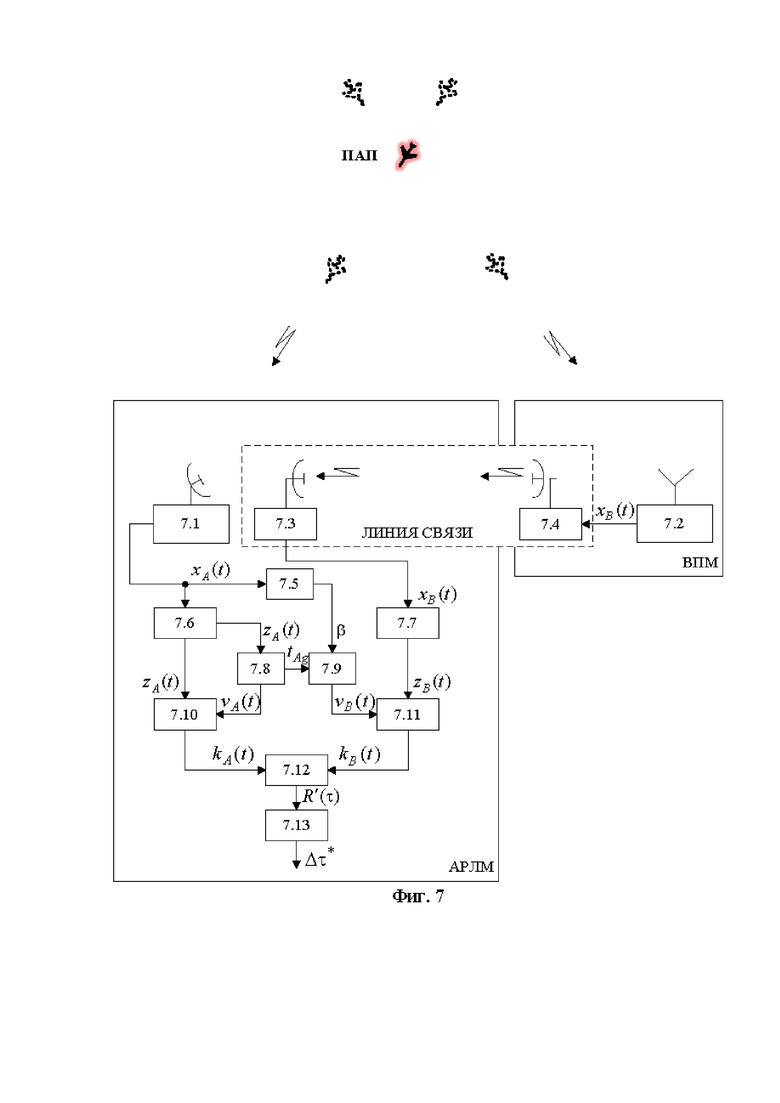
На фиг. 7 приведена блок-схема подсистемы приема и обработки радиолокационных сигналов, реализующей вышеизложенный способ. На фиг. 7 приняты следующие обозначения:
7.1 Приемный модуль АРЛМ;
7.2 Приемный модуль ВПМ;
7.3 Радиоприемник АРЛМ;
7.4 Радиопередатчик ВПМ;
7.5 Блок измерения угловых координат сигналов принятых АРЛМ;
7.6 Блок обработки сигналов принятых АРЛМ в согласованном с зондирующим сигналом фильтре;
7.7 Блок обработки сигналов принятых ВПМ в согласованном с зондирующим сигналом фильтре;
7.8 Блок пороговой обработки и оценивания временной задержки сигналов принятых АРЛМ;
7.9 Блок вычисления положения временных стробов для выделения сигналов принятых ВПМ;
7.10 Блок временного выделения сигналов принятых АРЛМ;
7.11 Блок временного выделения сигналов принятых ВПМ;
7.12 Блок расчета ВКФ;
7.13 Блок пороговой обработки ВКФ.
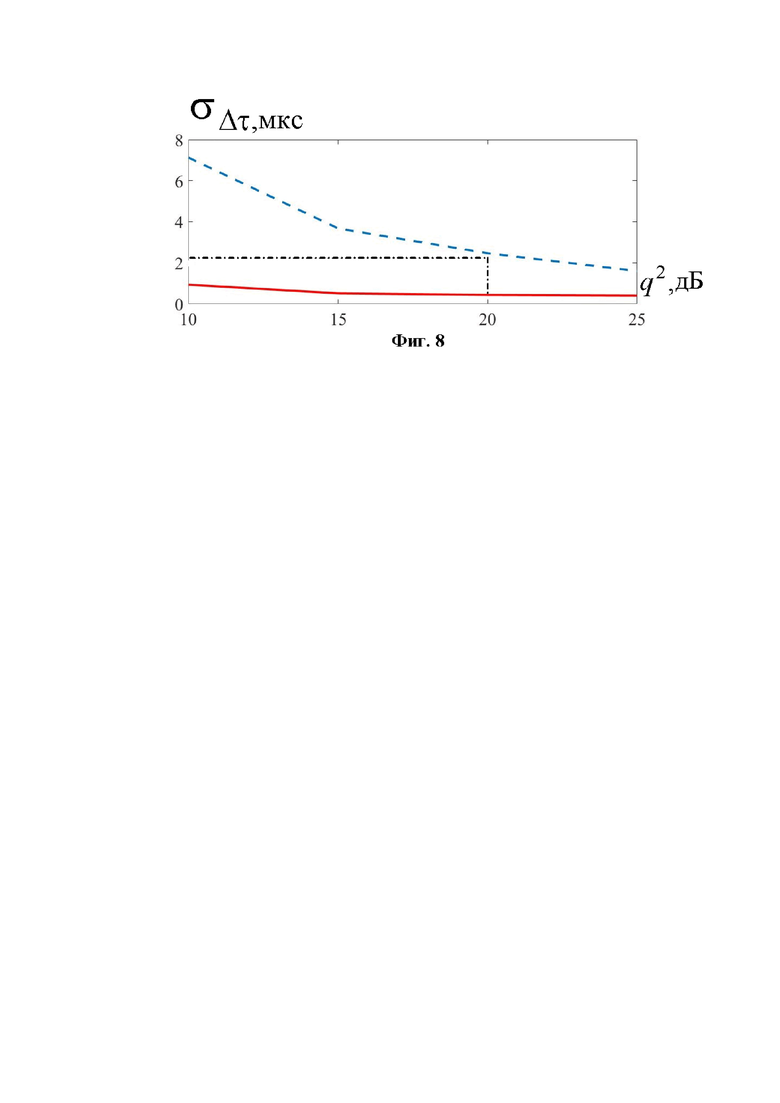
На фиг. 8 сплошными кривыми показаны потенциальные ошибки измерений разности времени распространения сигналов (границы Крамера-Рао) для предлагаемого способа, штриховыми - расчетные. Штрихпунктирной линией показано значение ошибки измерения разности времени распространения сигналов при фиксированном ОСШ по мощности.
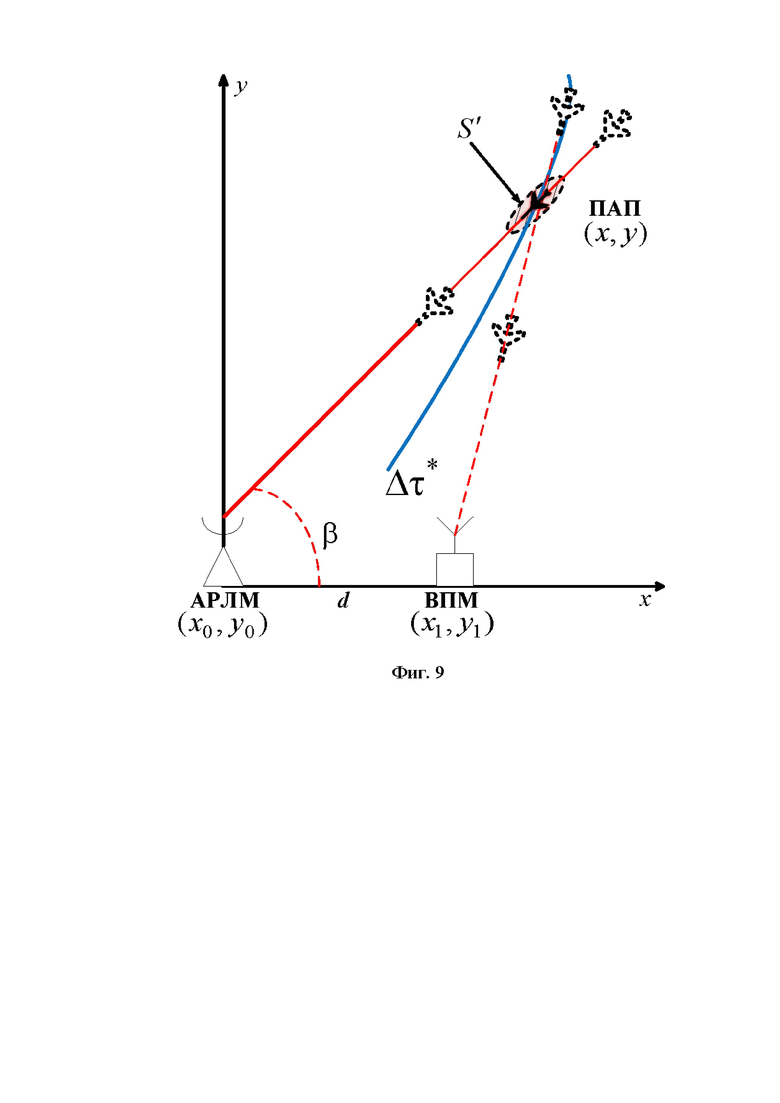
На фиг. 9 показана геометрия многопозиционной радиолокационной системы с пояснением возможности определения местоположения постановщика многократных ответно-импульсных помех. На фиг. 9 приняты следующие обозначения: АРЛМ - активный радиолокационный модуль; ВПМ - выносной пассивный модуль; ПАП - постановщик активных помех; (x0, y0), (x1, y1), (x, y) - координаты АРЛМ, ВПМ и ПАП соответственно; d - длина базы; β - азимут на ПАП; - разность времени распространения сигналов до ПАП относительно АРЛМ и ВПМ, измеренная предлагаемым способом; S' - область возможных пересечений ЛП.
Осуществление способа возможно с помощью блок-схемы представленной на фиг. 7 и заключается в последовательном выполнении следующих операций:
1. Прием сигналов АРЛМ и ВПМ, осуществляемый блоками 7.1 и 7.2 соответственно;
2. Ретрансляция сигнала принятого ВПМ в АРЛМ по линии связи, осуществляемая блоками 7.3 и 7.4;
3. Измерение угловых координат сигналов принятых АРЛМ в блоке 7.5;
4. Обработка сигналов принятых АРЛМ в согласованном с зондирующим сигналом фильтре (4), осуществляемая блоком 7.6;
5. Обработка сигналов принятых ВПМ в согласованном с зондирующим сигналом фильтре (5), осуществляемая блоком 7.7;
6. Временное выделение сигналов принятых АРЛМ, обработанных в согласованном с зондирующим сигналом фильтре, путем перемножения с временными стробами (6), осуществляемое блоком 7.10. Формирование временных стробов производится блоком 7.8. с использованием оценок временной задержки сигналов первичного обнаружения полученных в АРЛМ (8);
7. Временное выделение сигналов принятых ВПМ, обработанных в согласованном с зондирующим сигналом фильтре, путем перемножения с временными стробами (7), осуществляемое блоком 7.11. Формирование временных стробов производится блоком 7.9. с использованием оценок временной задержки сигналов первичного обнаружения и угловых координат постановщика активных помех полученных в АРЛМ, а так же с учетом геометрии МПРЛС (9-12).
8. Расчет ВКФ (13), осуществляемый блоком 7.12;
9. Поиск максимума ВКФ (14), осуществляемый блоком 7.13.
Заявленный технический результат подтвержден результатами, полученными методом имитационного моделирования.
Моделирование проведено при следующих исходных данных: АРЛМ расположен в точке с координатами (0,0), являющейся началом координат; ВПМ расположен в точке с координатами (10,0). В качестве входных воздействий моделировались отраженный сигнал от ПАП с координатами (10,150) и МОИП - одна опережающая и одна запаздывающая с координатами (4,50) и (15,220) соответственно.
Результат имитационного моделирования для рассмотренных выше исходных данных представлен на фиг. 8 в виде зависимости ошибок измерения разности времени распространения сигналов  от ОСШ по мощности q2: сплошной кривой - потенциальные ошибки (граница Крамера-Рао [9]), штриховой - расчетные ошибки.
от ОСШ по мощности q2: сплошной кривой - потенциальные ошибки (граница Крамера-Рао [9]), штриховой - расчетные ошибки.

где  - ОСШ по мощности;
- ОСШ по мощности;
 - энергия сигнала;
- энергия сигнала;
 - спектральная плотность мощности шума.
- спектральная плотность мощности шума.
Анализ зависимости показывает, что при увеличении ОСШ по мощности расчетные ошибки в определении разности времени распространения сигналов стремятся к потенциальным. Ошибка измерения разности расстояний σΔR определяется выражением (16) и при фиксированном значении ОСШ по мощности q2=20 дБ составит не более 600 метров.

где  - ошибка измерения разности расстояний;
- ошибка измерения разности расстояний;
 - ошибка измерения времени распространения сигналов.
- ошибка измерения времени распространения сигналов.
Однозначность измерения разности времени распространения сигналов и комбинация данных измерений с угломерными позволят уменьшить область пересечения линий положения и определить местоположение постановщика МОИП областью, обозначенной S' на фиг. 9.
На основании полученных оценок можно констатировать, что разработанный способ обеспечивает реализацию в радиолокационной станции оснащенной выносными пассивными модулями возможности определения разности расстояний до постановщика многократной ответно-импульсной помехи с ошибками измерения разности расстояний не более 600 метров. Это позволяет заключить о достижении заявленного технического результата, состоящего в обеспечении недоступной для прототипа возможности определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе.
Список литературы
1. Ван Брант, Л.Б. Справочник по методам радиоэлектронного подавления и помехозащиты систем с радиолокационным управлением. США. [Текст] / Л.Б. Ван Брант. 1978: пер. с англ. под ред. К.И. Фомичева, Л.М. Юдина, т. 1, 5 кн. - М.: Воениздат, 1985. - 1079 с.
2. Перунов, Ю.М. Радиоэлектронное подавление информационных каналов систем управления оружием [Текст] / Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин, под ред. Ю.М. Перунова. - М.: Радиотехника, 2008. - 416 с.
3. Куприянов, А.И. Радиоэлектронная борьба. Основа теории [Текст] / А.И. Куприянов, Л.Н. Шустов. - 2-е изд. - М.: Вузовская книга, 2015. - 800 с.
4. Евграфов, В.Г. Развитие авиационных средств РЭБ и их применение в современных вооруженных конфликтах [Текст] / В.Г. Евграфов // Зарубежное военное обозрение. - 2011. - №2. - С. 60 - 65.
5. Защита от радиопомех [Текст] / М.В. Максимов, М.П. Бобнев, Б.Х. Кривицкий и др., под ред. М.В. Максимова М.: Сов. радио, 1976. - 496 с.
6. Ботов, М.И. Основы теории радиолокационных систем и комплексов [Текст] / М.И. Ботов, В.А. Вяхирев, под ред. М.И. Ботова. - Красноярск: Сиб. федер. ун-т, 2013. - 530 с.
7. Теоретические основы радиолокации [Текст] / Я.Д. Ширман, В.Н. Голиков, И.Н. Бусыгин и др., под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970. - 560 с.
8. Алмазов, В.Б. Методы пассивной локации [Текст] / В.Б. Алмазов. - Харьков: ВИРТА. - 1974. - 66 с.
9. Караваев, В.В. Статическая теория пассивной локации [Текст] / В.В. Караваев, В.В. Сазонов - М.: Радио и связь, 1987. - 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
| Способ спектрально-корреляционного обнаружения летательных аппаратов по квазинепрерывным импульсным сигналам бортовых радиоэлектронных систем | 2021 |
|
RU2768370C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| Способ компенсации помех и комплекс для его осуществления | 2018 |
|
RU2703999C1 |
| Способ имитации сигнально-помеховой обстановки | 2023 |
|
RU2818373C1 |
| Способ селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью | 2023 |
|
RU2802367C1 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704007C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях различных типов (обзорных, многофункциональных и др.), оснащенных выносными пассивными модулями, для решения задачи селекции целей на фоне многократных ответно-импульсных помех, воздействующих по главному лепестку диаграммы направленности антенной решетки. Достигаемый технический результат – обеспечение возможности однозначного определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе. Указанный технический результат достигается тем, что в способе определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе, который заключается в расчете взаимнокорреляционной функции сигналов, принятых разнесенными приемными модулями, и поиске её максимума, перед расчетом взаимнокорреляционной функции сигналов, принятых разнесенными приемными модулями, производится их обработка в согласованном с зондирующим сигналом фильтре и перемножение с временными стробами, формируемыми с использованием оценок временной задержки сигналов первичного обнаружения и угловых координат постановщика активных помех, полученных в активном радиолокационном модуле, а также с учетом геометрии многопозиционной радиолокационной системы. 9 ил.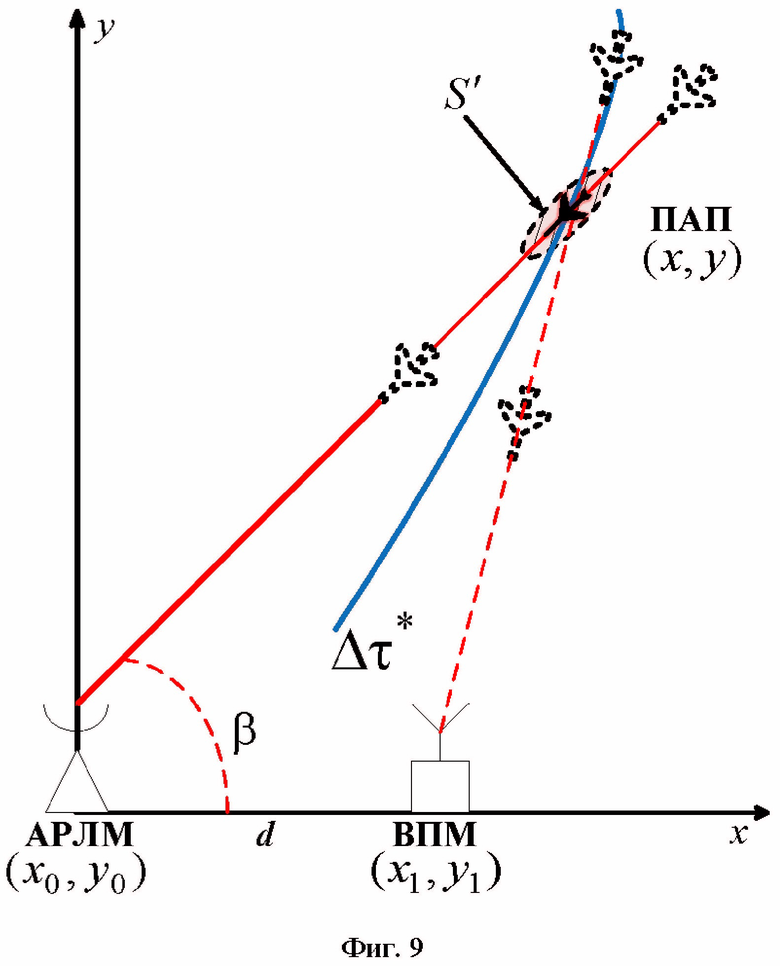
Способ определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе, заключающийся в расчете взаимнокорреляционной функции сигналов, принятых разнесенными приемными модулями, и поиске её максимума, отличающийся тем, что перед расчетом взаимнокорреляционной функции сигналов, принятых разнесенными приемными модулями, производится их обработка в согласованном с зондирующим сигналом фильтре и перемножение с временными стробами, формируемыми с использованием оценок временной задержки сигналов первичного обнаружения и угловых координат постановщика активных помех, полученных в активном радиолокационном модуле, а также с учетом геометрии многопозиционной радиолокационной системы, описываемой тригонометрическими уравнениями
где  – функция стробирования для сигналов, принятых выносным пассивным модулем;
– функция стробирования для сигналов, принятых выносным пассивным модулем;
 – оценки временной задержки до g-го сигнала относительно выносного пассивного модуля;
– оценки временной задержки до g-го сигнала относительно выносного пассивного модуля;
 – длительность временных стробов;
– длительность временных стробов;
 – оценки расстояний до g-го сигнала относительно выносного пассивного модуля;
– оценки расстояний до g-го сигнала относительно выносного пассивного модуля;
 – оценки расстояний до g-го сигнала относительно активного радиолокационного модуля;
– оценки расстояний до g-го сигнала относительно активного радиолокационного модуля;
 – скорость света;
– скорость света;
 – длина базы;
– длина базы;
 – азимут на постановщик активных помех;
– азимут на постановщик активных помех;
 – номер импульсного элемента многократной ответно-импульсной помехи;
– номер импульсного элемента многократной ответно-импульсной помехи;
 – количество импульсных элементов многократной ответно-импульсной помехи.
– количество импульсных элементов многократной ответно-импульсной помехи.
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) | 2015 |
|
RU2586077C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| СПОСОБ ПОДАВЛЕНИЯ АКТИВНОЙ ПОМЕХИ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2549375C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1987 |
|
RU2226700C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНОЙ ТРАЕКТОРИИ, ФОРМИРУЕМОЙ СИНХРОННОЙ ОТВЕТНОЙ ПОМЕХОЙ | 2015 |
|
RU2583050C1 |
| US 5361073 A, 01.11.1994 | |||
| KR 101017590 B1, 28.02.2011 | |||
| CN 103926569 A, 16.07.2014 | |||
| СПОСОБ ПРЕДОСТАВЛЕНИЯ ПОСЛЕДОВАТЕЛЬНЫХ ИМПУЛЬСОВ МОЩНОСТИ | 2012 |
|
RU2631670C2 |
| US 6580392 B2, 17.06.2003. | |||

