Область техники, к которой относится изобретение
Изобретение относится к области определения уровня заполнения. В частности, изобретение относится к устройству измерения уровня заполнения для измерения уровня заполнения, к способу измерения уровня заполнения, к программному элементу и к компьютерно-читаемому носителю.
Уровень техники
Способы отслеживания эхо-сигнала используются для военных прикладных задач и для гражданского контроля воздушного пространства, а также для применений в автомобильной отрасли. Отнесение эхо-сигнала к правильной траектории зачастую основано на позиции эхо-сигнала, продолжительности эхо-сигнала, амплитуде эхо-сигнала, форме эхо-сигнала и скорости эхо-сигнала.
Однако, известные способы отнесения не всегда надежны.
В DE 10 2006 006 572 A1 раскрывается спаренная промежуточная частотная дискретизация для датчиков уровня заполнения с импульсным временем работы. Кроме того, описывается способ определения фазы эхо-сигнала.
В WO 2009/037000 A2 описывается способ извлечения эхо-сигнала.
Сущность изобретения
Желательно иметь простое и надежное отнесение эхо-сигнала к соответствующей траектории в области определения уровня заполнения.
Согласно аспектам изобретения устройство измерения уровня заполнения для измерения уровня заполнения наполняемой среды в контейнере, соответствующий способ измерения, программный элемент и компьютерно-читаемый носитель предоставлены согласно независимым пунктам формулы изобретения. Дополнительные варианты осуществления следуют из зависимых пунктов формулы изобретения и последующего описания.
Следует отметить, что признаки, которые в последующем описываются относительно устройства измерения уровня заполнения, могут также быть реализованы как соответствующие этапы способа, и что признаки, которые в последующем описываются относительно способа, могут также быть реализованы в устройстве измерения уровня заполнения.
Согласно первому аспекту изобретения предоставляется устройство измерения уровня заполнения для измерения уровня заполнения, например, наполняемой среды внутри контейнера, при этом устройство содержит модуль формирования сигнала и модуль получения и обработки сигнала.
Модуль формирования сигнала предназначен для формирования и передачи передаваемого сигнала по направлению к наполняемой среде, а модуль получения и обработки сигнала предназначен для получения эхо-кривой, соответствующей отраженной части передаваемого сигнала. Кроме того, модуль получения и обработки сигнала предназначен, чтобы идентифицировать, по меньшей мере, один эхо-сигнал эхо-кривой, определять относительный знак значения амплитуды эхо-сигнала относительно соответствующего относительного значения амплитуды передаваемого сигнала и/или определять относительную фазу эхо-сигнала относительно соответствующей фазы передаваемого сигнала, и относить эхо-сигнал к первой траектории эхо-сигнала, которая относится к предыдущим эхо-сигналам ранее полученных эхо-кривых, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет тот же знак, что и значение амплитуды данного эхо-сигнала эхо-кривой, и/или если относительное значение фазы первого эхо-сигнала идентично относительному значению фазы данного эхо-сигнала.
Следовательно, оценка измеренных данных об эхо-сигнале может быть оптимизирована на основе определенного относительного знака и/или определенной относительной фазы эхо-сигнала (в последующем также называемой "полярностью") эхо-кривой. Эта оценка истории ранее полученных данных об эхо-сигнале может также называться отслеживанием.
Термин "отслеживание" относится к способу слежения, который отслеживает движущиеся объекты или, по меньшей мере, их эхо-сигналы, как в нашем случае. Траектория, которая классифицируется как траектория положительного эхо-сигнала, т.е., эхо-сигнала, который имеет положительный относительный знак или положительную относительную фазу (т.е., положительную полярность), не может быть отнесена к эхо-сигналу, который имеет отрицательный относительный знак или отрицательную относительную амплитуду.
Согласно примерному варианту осуществления изобретения, определение знака значения амплитуды эхо-сигнала содержит сравнение средней амплитуды эхо-сигнала с предварительно определенным опорным значением.
Для определения средней амплитуды эхо-сигнала значения амплитуды эхо-сигнала могут быть интегрированы по времени и затем, например, разделены на продолжительность временного интервала, в течение которого эхо-кривая интегрировалась.
Если определенная средняя амплитуда эхо-сигнала, например, больше, чем предварительно определенное опорное значение, относительный знак значения амплитуды считается положительным, при этом, если определенная средняя амплитуда эхо-сигнала ниже предварительно определенного опорного значения, относительный знак амплитуды считается отрицательным.
Согласно другому примерному варианту осуществления изобретения определение относительного знака значения амплитуды эхо-сигнала содержит сравнение эхо-сигнала с предварительно определенной опорной кривой.
Если, например, весь эхо-сигнал или, по меньшей мере, значительная часть эхо-сигнала лежит выше предварительно определенной опорной кривой, относительный знак эхо-сигнала определяется как положительный, и наоборот.
Согласно другому примерному варианту осуществления изобретения определение относительной фазы эхо-сигнала содержит применение вычисления корреляции и/или тригонометрического вычисления.
Вычисление относительной фазы на основе тригонометрического вычисления описано в DE 10 2006 006 572.
При применении вычисления корреляции, два сигнала могут быть сравнены друг с другом. Например, коэффициент корреляции передаваемого импульса и соответствующего эхо-сигнала может быть вычислен и использован для количественного определения сходства двух сигналов. Если принятый эхо-сигнал имеет ту же относительную фазу, что и передаваемый импульс (см. 801, 802 на фиг.8), оба сигнала являются более схожими, чем они были бы, если относительные фазы были бы различными (см. 803, 804 на фиг.8). Это сходство представлено посредством коэффициента корреляции. Таким образом, сравнивая коэффициент корреляции с пороговым значением, можно определить, имеет ли эхо-сигнал ту же относительную фазу или инвертированную относительную фазу, относительно первоначального передаваемого импульса.
Согласно другому примерному варианту осуществления изобретения опорная кривая представлена постоянным значением или может быть получена посредством фильтрации ранее полученной или полученной в настоящей момент эхо-кривой.
Согласно другому примерному варианту осуществления изобретения отнесение эхо-сигнала к первой траектории эхо-сигнала предотвращается, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет другой знак относительно значения амплитуды эхо-сигнала, или если относительное значение фазы первого эхо-сигнала не является идентичным относительному значению фазы эхо-сигнала.
Согласно другому примерному варианту осуществления изобретения модуль получения и обработки сигнала дополнительно предназначен, чтобы относить эхо-сигнал к другой, второй траектории, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет другой знак, чем относительное значение амплитуды эхо-сигнала, или если относительное значение фазы первого эхо-сигнала не идентично относительному значению фазы эхо-сигнала.
Согласно другому примерному варианту осуществления изобретения устройство измерения уровня заполнения является радаром уровня заполнения или ультразвуковым устройством измерения уровня заполнения. Кроме того, оно может быть приспособлено для использования направленных микроволн для измерения уровня заполнения.
Согласно дополнительному аспекту изобретения предоставляется способ измерения уровня заполнения наполняемой среды, в котором в направлении наполняемой среды формируется и передается передаваемый сигнал, эхо-кривая, соответствующая отраженной части передаваемого сигнала, идентифицируется, по меньшей мере, один эхо-сигнал эхо-кривой, определяется знак значения амплитуды эхо-сигнала относительно соответствующего значения амплитуды передаваемого сигнала, или определяется относительная фаза эхо-сигнала относительно соответствующей фазы передаваемого сигнала. Кроме того, эхо-сигнал соотносится к первой траектории эхо-сигнала, которая связана с предыдущими эхо-сигналами ранее полученных эхо-кривых, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет тот же знак, что и значение амплитуды данного эхо-сигнала эхо-кривой.
Согласно другому аспекту изобретения представляется программный элемент, который, при исполнении в процессоре устройства измерения уровня заполнения, инструктирует устройству выполнять выше- и нижеупомянутые этапы способа.
Согласно другому аспекту изобретения предоставляется компьютерно-читаемый носитель, который содержит компьютерную программу, которая, при исполнении в процессоре устройства измерения уровня заполнения, инструктирует устройству выполнять выше- и нижеупомянутые этапы способа.
Ниже, примерные варианты осуществления изобретения описываются со ссылкой на чертежи.
Краткое описание чертежей
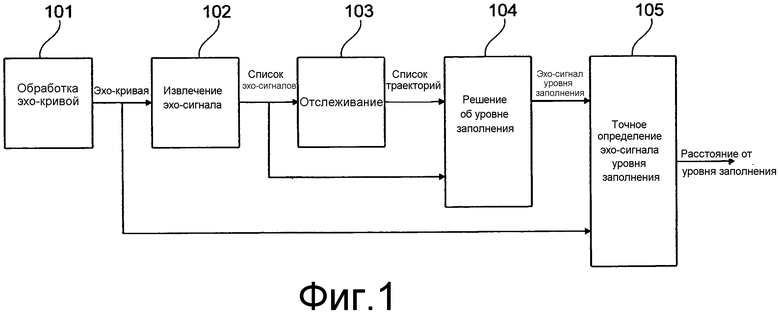
Фиг.1 показывает принципиальный подход в обработке эхо-сигнала.
Фиг.2 показывает устройство измерения уровня заполнения согласно примерному варианту осуществления изобретения.
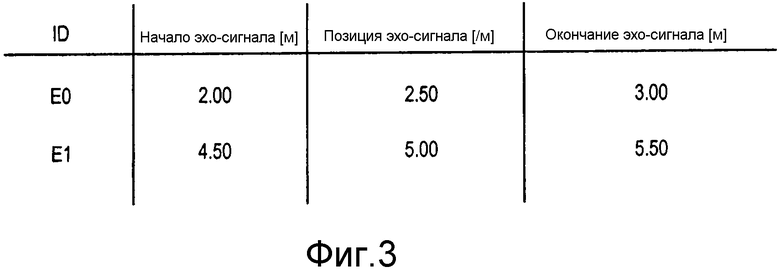
Фиг.3 показывает список эхо-сигналов.
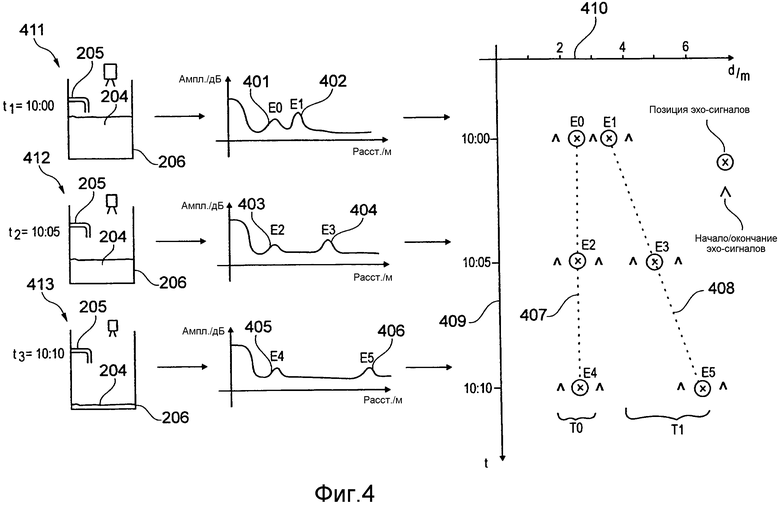
Фиг.4 показывает три эхо-кривых, полученных в три различных момента времени, и соответствующие траектории эхо-сигнала.
Фиг.5 показывает две траектории в списке траекторий.
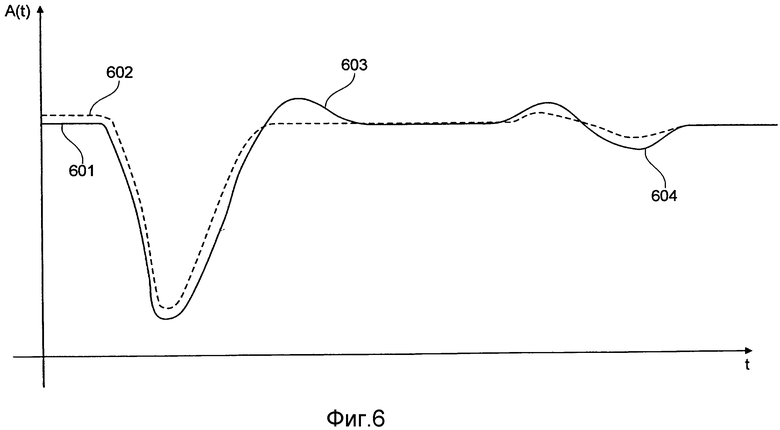
Фиг.6 показывает эхо-кривую и опорную кривую в случае направленных микроволн.
Фиг.7 показывает блок-схему последовательности операций согласно примерному варианту осуществления изобретения.
Фиг.8 показывает передаваемые и принимаемые сигналы в случае ненаправленных, бесконтактных измерений.
Фиг.9 показывает список эхо-сигналов согласно примерному варианту осуществления изобретения.
Фиг.10 показывает тест правдоподобия согласно примерному варианту осуществления настоящего изобретения.
Подробное описание примерных вариантов осуществления
Иллюстрации на чертежах являются схематичными и не начерчены в масштабе.
В последующем описании чертежей одинаковые ссылочные символы используются для идентичных или аналогичных элементов.
Настоящее изобретение, в целом, относится к способам и устройствам для измерения всех видов уровней заполнения. В датчиках уровня заполнения, которые работают согласно FMCW-способу или способу со временем переноса импульса, электромагнитные или акустические волны излучаются в направлении поверхности уровня заполнения. Затем, датчик записывает эхо-сигналы, отраженные заполняющим материалом и внутренностями контейнера, и из них получает соответствующий уровень заполнения.
Фиг.1 показывает основную последовательность обработки эхо-сигнала в коммерческом устройстве измерения уровня заполнения.
Блок "Обработка эхо-кривой" 101 содержит все аппаратные модули и программные модули, которые требуются, чтобы предоставлять эхо-кривую как изображение текущих условий отражения в контейнере. Эхо-кривая предпочтительно получается в цифровой форме в микропроцессорной системе и изучается, с помощью известных способов, на предмет каких-либо эхо-сигналов, содержащихся в ней.
Способ, примененный для этой цели в блоке "Извлечение эхо-сигнала" 102, содержит, в частности, способы из области извлечения эхо-сигнала на основе порогового значения или способы, основанные на извлечении эхо-сигнала на основе шкалы. После обработки способа извлечения эхо-сигнала предоставляется цифровой список эхо-сигналов, который предпочтительно содержит детали, относящиеся к началу, местоположению и окончанию одного или нескольких эхо-сигналов, содержащихся в эхо-кривой.
Для того, чтобы дополнительно увеличивать надежность обработки эхо-сигнала устройства измерения уровня заполнения, найденные эхо-сигналы располагаются в историческом контексте в блоке "Отслеживание" 103. Способы, используемые в этом процессе, могут быть получены из текущего состояния уровня техники. Например, могут быть выгодно использованы способы, основанные на алгоритме Манкреса. При отслеживании, в частности, ход определения местоположения эхо-сигнала отслеживается посредством нескольких отдельных считываний, и эта собранная информация представляется в запоминающем устройстве в форме траектории. Собранная историческая информация о нескольких эхо-сигналах делается доступной извне в форме списка траекторий.
В блоке "Решение об уровне заполнения" 104 данные текущего списка эхо-сигналов и информация, относящаяся к хронологическому прогрессу отдельных эхо-сигналов, балансируются для того, чтобы делать возможным, согласно известным способам, идентификацию эхо-сигнала, соответствующего уровню заполнения.
Для того, чтобы дополнительно улучшать точность измерения уровня заполнения, позиция определенного эхо-сигнала уровня заполнения может быть определена с большой точностью посредством необязательного блока "Точное измерение эхо-сигнала уровня заполнения" 105 с помощью интенсивных по времени способов вычисления, например, способов интерполяции. Определенное расстояние от заполняемого материала делается доступным извне. Это предоставление может быть реализовано в аналоговой форме (например, посредством 4..20 мА интерфейса) или в цифровой форме (например, посредством полевой шины).
Преимущества настоящего изобретения могут получаться в результате специальных граничных условий, которым обрабатываемый эхо-сигнал подвергается в коммерческом устройстве измерения уровня заполнения.
Фиг.2 показывает типовое применение устройства 201 измерения уровня заполнения с электронным модулем 100 согласно примерному варианту осуществления изобретения.
Посредством антенны 202 устройство 201 измерения уровня заполнения излучает сигнал 203 в направлении среды 204, которая должна быть измерена. Устройство измерения уровня заполнения само может определять расстояние от среды согласно ультразвуковому принципу, принципу радара, принципу лазера или принципу направленной микроволны.
Соответственно, и ультразвуковые волны, и электромагнитные волны, могут рассматриваться как сигналы. Среда 204 отражает падающую волну обратно к измерительному устройству, где упомянутая волна принимается и обрабатывается. В то же время излучаемый сигнал также отражается внутренностями контейнера, например, подводящей трубой 205. Эхо-кривая 206, принятая в устройстве 201 измерения уровня заполнения, может, таким образом, содержать не только полезный эхо-сигнал 208, обусловленный уровнем заполнения, но также эхо-сигналы, вызванные внутренними зафиксированными позициями 207 помех, причем эти эхо-сигналы далее в данном документе называются паразитными эхо-сигналами или ложными эхо-сигналами.
Затем начинается процедура обработки сигнала, эхо-кривая специфическим образом исследуется на предмет эхо-сигналов 102.
В результате извлечения эхо-сигнала формируется список эхо-сигналов согласно схеме на фиг.3. Помимо характеристических значений паразитных эхо-сигналов 207 (E0), сформированных подводящей трубой, список эхо-сигналов также содержит эхо-сигнал 208 уровня заполнения (E1), сформированный средой 204.
Конечно, представленные характеристики списка эхо-сигналов просто представляют отдельную реализацию списка эхо-сигналов. В практическом применении также обычно используются списки эхо-сигналов с дополнительными характеристиками или измененными характеристиками эхо-сигнала.
Если циклы циклического измерения реализованы в устройстве измерения уровня заполнения, тогда это дает в результате последовательность принятых эхо-кривых, как показано на фиг.4. В качестве примера показаны три независимых цикла 411, 412, 413 измерений, в каждом случае разделенные пятью минутами. Конечно, вместо этого могут быть реализованы значительно более быстрые циклы измерений, например, разделенные одной секундой.
Описанный сценарий показывает условия во время опорожнения контейнера 206. Для того, чтобы отслеживать движение отдельных эхо-сигналов через несколько таких циклов измерения, используются специализированные алгоритмы, которые известны под термином "отслеживание". В настоящем примере движение эхо-сигналов 401 (E0), 403( E2) и 405 (E4), которые вызваны положением 205 помехи, описано посредством общей траектории 407 (T0). Соответственно, движение эхо-сигналов 402 (E1), 404 (E3) и 406 (E5), которые сформированы средой 204, представлено общей траекторией 408 (T1). Представление, в форме траектории, движения эхо-сигналов, которые вызваны обычной позицией отражения, описано в литературе и используется с выгодой также в других областях, например, в воздушном наблюдении.
Вертикальная ось 410 представляет расстояние от поверхности подаваемого материала или от положения помехи в метрах, в то время как продольная ось 409 представляет время, в которое соответствующий цикл измерения имеет место.
По завершении отслеживания 103 найденные траектории представляются в форме списка траекторий.
Фиг.5 показывает примерным образом список траекторий, который получился бы в результате вышеупомянутой последовательности эхо-кривых. Опять же следует указать, что представленные параметры списка траекторий представляют предпочтительный выбор возможных характеристик, лежащих в основе эхо-сигналов. Конечно, также возможно отслеживать дополнительные или измененные характеристики в таком списке траекторий.
Относительно, проблемы отслеживания могут возникать, когда эхо-сигналы из списка эхо-сигналов должны быть отнесены к представленным траекториям из соответствующего списка траекторий. С известными способами соотнесение может быть ошибочным.
Как уже констатировано выше, может быть видно, что целью изобретения является обеспечение отнесения эхо-сигнала к траектории из списка траекторий простым образом для того, чтобы предотвращать ошибочные отнесения. Таким образом, надежность отнесения эхо-сигнала может быть повышена.
Многие способы отслеживания относятся к отслеживанию движущихся объектов. Например, маршрут самолета или транспортного средства может, таким образом, быть прослежен. Отнесение эхо-сигнала к объекту, если множество эхо-сигналов и/или объектов присутствуют, основано на определении характеристик, которые могут быть получены из эхо-сигнала. Например, такие характеристики могут быть положением эхо-сигнала, скоростью эхо-сигнала, амплитудой эхо-сигнала, доплеровским смещением и продолжительностью эхо-сигнала.
Согласно аспекту настоящего изобретения, в случае устройства измерения уровня заполнения на основе времени прохождения дополнительные характеристики эхо-сигнала могут быть приняты во внимание для отнесения эхо-сигнала к соответствующей траектории.
Фиг.6 показывает эхо-кривую и опорную кривую в случае измерения уровня заполнения, выполняемого с помощью направленных микроволновых сигналов. Эхо-кривая 601, которая получена посредством такого устройства измерения уровня заполнения, может содержать всплески 603, 604, которые направлены вверх или вниз. Причиной этих всплесков являются скачки или шаги в зависимости от измерительного устройства или условий измерения, которые могут возникать в переходных областях между различными средами, имеющими различные плотности или диэлектрические постоянные. Например, когда электромагнитный сигнал движется из области большого импеданса в область меньшего импеданса (например, короткозамкнутая цепь), может быть получено в результате отражение с фазой, противоположной передаваемому сигналу. В случае перехода от меньшего импеданса к большему импедансу отражение, однако, имеет ту же фазу.
Фиг.8 показывает, как фаза или амплитуда передаваемого сигнала может быть изменена. Первый сигнал 801 и второй сигнал 803 представляют передаваемые сигналы. Сигналы 802 и 804 движутся в противоположном направлении и являются сигналами, получающимися в результате отражений передаваемых сигналов 801, 803, соответственно. Сигнал 802 имеет ту же фазу, что и передаваемый сигнал 801, при этом отражаемый сигнал 804 показывает резкое изменение фазы на 180°. Следовательно, относительная фаза между передаваемым и принимаемым сигналом может быть использована для определения того, какие виды скачков импеданса присутствуют на пути передачи сигнала.
Например, фиг.6 показывает типичную форму эхо-кривой в случае направленных микроволновых сигналов. Кроме того, показана определенная опорная кривая (так называемая линия нуля) 602, которая дает возможность устройству измерения уровня заполнения определять, присутствует ли положительный эхо-сигнал (такой как всплеск 603) или отрицательный эхо-сигнал (такой как всплеск 604). Кроме того линия 602 нуля позволяет устройству определять знак фазы соответствующего эхо-сигнала.
Линия 602 нуля может иметь различные формы. Например, она может иметь форму прямой линии, представляющей постоянное значение амплитуды, или форму, которая приближается к эхо-кривой, например, измеряемой в настоящей момент эхо-кривой.
Прямая линия может, например, быть получена на основе стохастического анализа, например, посредством определения среднего значения амплитуды. Аппроксимирующая кривая может быть получена посредством оценки, интерполяции и/или фильтрации. Линия нуля определяет пороговое значение, на основе которого может быть определено, присутствует ли положительный эхо-сигнал или всплеск, или отрицательный эхо-сигнал или всплеск. Более конкретно, если эхо-сигнал или всплеск лежит выше (либо полностью, либо, по меньшей мере, в значительной степени) выше линии нуля, эхо-сигнал или всплеск классифицируется как положительный, и наоборот.
Кроме того, фаза отраженных сигналов из бесконтактных устройств измерения уровня заполнения, таких как радары уровня заполнения, может быть определена, как показано на фиг.8. Для определения фазы отраженного эхо-сигнала могут быть использованы способы корреляции между передаваемым импульсом и принимаемым импульсом, тригонометрические способы, использующие выборочные значения амплитуды, или другие способы. DE 10 2006 006 572 A1, который, таким образом, содержится в данном документе по ссылке, раскрывает способ определения фазы эхо-сигнала.
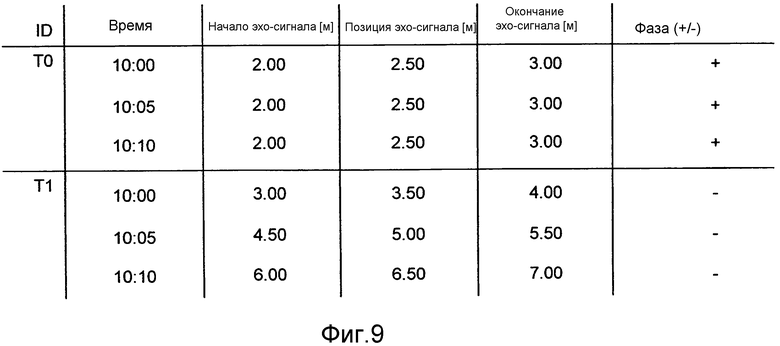
Определенный относительный знак значения амплитуды эхо-сигнала и/или относительная фаза эхо-сигнала могут быть использованы в связи с алгоритмом отслеживания. Например, эта информация может быть добавлена к траекториям, изображенным на фиг.5.
Это может быть видно на фиг.9, которая показывает траектории эхо-сигнала и дополнительный относительный знак амплитуды или информацию об относительной фазе, тем самым, характеризуя, имеет ли соответствующий эхо-сигнал положительный или отрицательный "знак" (плюс или минус).
Траектория T0 - это траектория, эхо-сигналы которой имеют положительный знак (т.е., положительную относительную фазу или положительное относительное значение амплитуды), и, следовательно, только эхо-сигналы с таким положительным знаком могут быть добавлены к этой траектории. С другой стороны, траектория T1 - это траектория, которая содержит только эхо-сигналы с отрицательным знаком, и, следовательно, только эхо-сигналы с таким отрицательным знаком могут быть добавлены к этой траектории.
Согласно аспекту изобретения, отнесение эхо-сигнала с отрицательным знаком к траектории T0 и отнесение эхо-сигнала с отрицательным знаком к траектории T1 предотвращаются.
Альтернативно, после того как эхо-сигнал был отнесен к соответствующей траектории, это отнесение может быть проверено и отменено, если вновь добавленный эхо-сигнал имеет другой знак, чем у эхо-сигналов, уже присутствующих в соответствующей траектории.
Дополнительно возможно, что предоставляется два списка эхо-сигналов и два списка траекторий или один список эхо-сигналов и два списка траекторий, которые включают в себя эхо-сигналы или траектории с идентичными знаками. Традиционное отслеживание может быть выполнено дважды, при этом во время первого отслеживания рассматриваются только эхо-сигналы и списки траекторий с отрицательным знаком, и при этом во время второго отслеживания рассматриваются только эхо-сигналы и списки траекторий с положительным знаком.
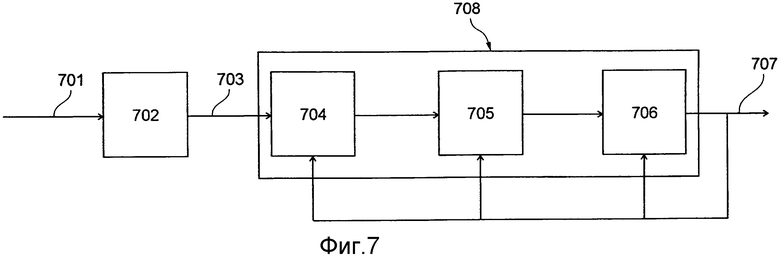
Фиг.7 показывает блок-схему последовательности операций отслеживания траектории согласно примерному варианту осуществления изобретения. Начиная с эхо-кривой 701, извлечение 702 эхо-сигнала дает в результате список эхо-сигналов 703. WO 2009/037000 A2, который, таким образом, содержится в данном документе по ссылке, описывает способы для извлечения эхо-сигнала. Извлечение эхо-сигнала согласно изобретению определяет, кроме начала эхо-сигнала, положение эхо-сигнала и окончание эхо-сигнала, относительный знак значения амплитуды эхо-сигнала относительно соответствующего относительного значения амплитуды передаваемого сигнала и/или относительную фазу эхо-сигнала относительно соответствующей фазы передаваемого сигнала отдельных эхо-сигналов.
Отнесение эхо-сигналов к соответствующей траектории может быть выполнено с помощью матрицы стоимости, которая содержит стоимости отнесения или вероятности отнесения.
Следует отметить, что отнесение эхо-сигнала i к траектории j представлено элементом i, j матрицы стоимости.
Весь алгоритм 708 отслеживания траектории может быть поделен на три функциональных блока. Функциональный блок 704 выполняет тест правдоподобия. Траектории из списка 707 траекторий, вместе с эхо-сигналами из списка эхо-сигналов, анализируются относительно своих знаков.
Неправильные отнесения (вследствие того, что знаки различны) отмечаются в матрице стоимости как неправильные. Функциональный блок 705 вычисляет абсолютные стоимости оставшихся возможных отнесений. Для того, чтобы выполнить это, рассматриваются изменения в положении эхо-сигнала и/или амплитуде, например. Следует отметить, что блок 705 может также быть выполнен перед блоком 704.
Если матрица стоимости завершена, корректное отнесение каждого эхо-сигнала к соответствующей траектории эхо-сигнала может быть определено в функциональном блоке 706. Чтобы выполнить это, может быть использован так называемый алгоритм Манкреса.
В результате, создается законченный список 707 траекторий.
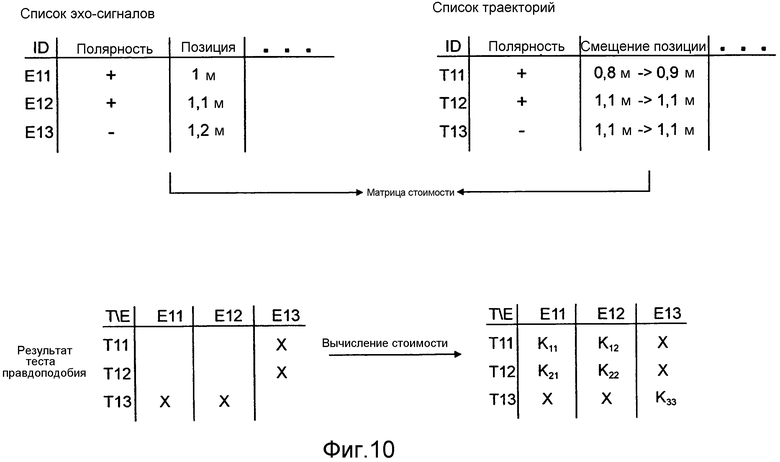
Фиг.10 показывает более подробную иллюстрацию теста правдоподобия. Как список траекторий, так и список эхо-сигналов, содержат столбец, представляющий относительный знак/относительную фазу, т.е., полярность, каждого эхо-сигнала или каждой траектории, соответственно.
Тест правдоподобия может теперь быть выполнен с помощью списка траекторий и списка эхо-сигналов. Например, эхо-сигнал номер 13 не может быть отнесен к траекториям 11 или 12. Кроме того, траектория 13 не может быть отнесена к эхо-сигналам 11 или 12, поскольку траектория и эхо-сигнал имеют различные полярности (знаки/фазы).
Если эхо-сигнал не может быть отнесен к соответствующей траектории, это представляется символом x или, например, относительно высоким значением, например, 5000.
Затем, выполняется определение стоимостей Kij для отнесения эхо-сигнала j к траектории i.
Способ, таким образом, позволяет простой и быстрый тест правдоподобия отнесений "траектория эхо-сигнала".
Согласно изобретению, может быть принято жесткое решение о том, может ли эхо-сигнал быть отнесен к соответствующей траектории, или нет, на основе "полярности" эхо-сигнала.
Известные амплитудные селекторы с диапазоном, например, +/-10 мВ могут позволять (ошибочное) отнесение эхо-сигнала, имеющего -2 мВ, к траектории, имеющей +5 мВ. Согласно аспекту изобретения, такое отнесение может быть предотвращено независимо от диапазона какого-либо амплитудного селектора.
Хотя изобретение подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такое иллюстрирование и описание должны считаться иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации в раскрытых вариантах осуществления могут быть поняты и выполнены специалистами в данной области техники, применяющими на практике заявленное изобретение, из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово "содержит" не исключает других элементов или этапов, а единственное число не исключает множественного. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих мер не может быть использована с выгодой. Все ссылки с номерами в формуле изобретения не должны рассматриваться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТСЛЕЖИВАНИЕ С УЧЕТОМ ИЗМЕНЧИВОСТИ | 2012 |
|
RU2600496C2 |
| ЛИНЕЙНОЕ ОТНОШЕНИЕ МЕЖДУ ТРЕКАМИ | 2012 |
|
RU2606456C2 |
| ИЗМЕРЕНИЕ НА ОСНОВЕ ФУНКЦИИ ДЕТАЛИЗАЦИИ | 2008 |
|
RU2476901C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УРОВНЯ ЗАПОЛНЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОЙ ВЗАИМОСВЯЗИ МЕЖДУ РАЗЛИЧНЫМИ ТРЕКАМИ | 2012 |
|
RU2600507C2 |
| АВТОМАТИЧЕСКИЙ НАКОПИТЕЛЬ ПАРАЗИТНОГО ЭХО-СИГНАЛА | 2005 |
|
RU2394211C2 |
| Способ определения акустической плотности | 2017 |
|
RU2657314C1 |
| ДАТЧИК, СИСТЕМА И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ И РАЗЛИВОЧНАЯ МАШИНА | 2021 |
|
RU2834106C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР, СПОСОБ ТЕСТИРОВАНИЯ УРОВНЕМЕРА И СИСТЕМА ИЗМЕРЕНИЯ УРОВНЯ, СОДЕРЖАЩАЯ ТАКОЙ УРОВНЕМЕР | 2014 |
|
RU2664916C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ И УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ СОЕДИНИТЕЛЬНОЙ ЗОНЫ ГЕРМЕТИЗИРОВАННЫХ КОНТЕЙНЕРОВ ДЛЯ ПИЩЕВЫХ ПРОДУКТОВ | 2002 |
|
RU2326378C2 |
| РЕГУЛИРОВАНИЕ ПОТОКА ИНФОРМАЦИИ В ОПТИЧЕСКИХ СЕТЯХ ПЕРЕДАЧИ ДАННЫХ | 2004 |
|
RU2285343C2 |


Изобретение относится к устройству для измерения уровня заполнения наполняемой среды в контейнере, а также к способу измерения и к компьютерно-читаемому носителю, служащему для управления устройством. Техническим результатом является упрощение процедуры отнесения эхо-сигнала, которая указывает уровень заполнения среды в контейнере к соответствующей траектории. Устройство измерения уровня заполнения выполнено с возможностью определения относительного знака полученного эхо-сигнала посредством сравнения эхо-сигнала с предварительно определенным опорным значением или предварительно определенной опорной кривой. Относительный знак является положительным (отрицательным), если среднее значение эхо-сигнала больше (меньше) опорного значения или если эхо-кривая лежит выше (ниже) опорной кривой. Эхо-сигнал может быть отнесен к траектории эхо-сигнала, соответствующей уровню заполнения среды в контейнере, если ранее определенные эхо-сигналы в траектории эхо-сигнала имеют такой же относительный знак, как и полученный сигнал. В ином случае отнесение эхо-сигнала к траектории эхо-сигнала предотвращается. 3 н. и 6 з.п. ф-лы, 10 ил.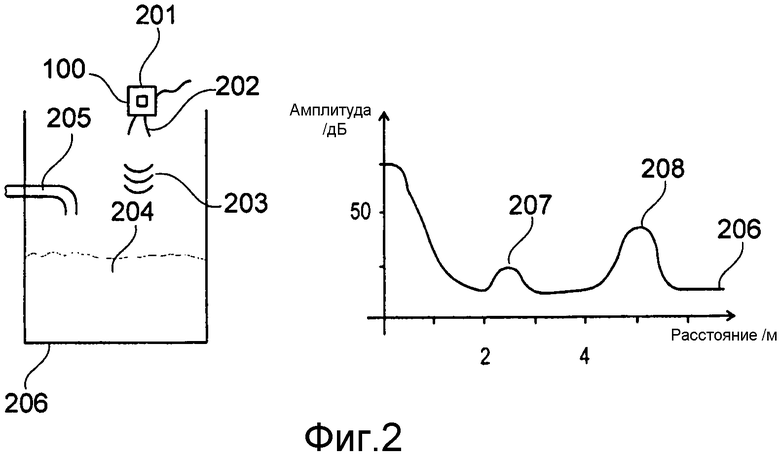
1. Устройство измерения уровня заполнения для измерения уровня заполнения, при этом устройство измерения уровня заполнения содержит:
модуль формирования сигнала, предназначенный для формирования и передачи передаваемого сигнала в направлении наполняемой среды;
модуль получения и обработки сигнала, предназначенный для получения эхо-кривой, соответствующей отраженной части передаваемого сигнала;
при этом модуль получения и обработки сигнала дополнительно предназначен, чтобы выполнять этапы:
идентификации, по меньшей мере, одного эхо-сигнала эхо-кривой;
определения относительного знака значения амплитуды эхо-сигнала,
причем относительный знак значения амплитуды является положительным, если средняя амплитуда эхо-сигнала больше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит выше предварительно заданной опорной кривой и
при этом относительный знак амплитуды является отрицательным, если средняя амплитуда эхо-сигнала меньше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит ниже предварительно заданной опорной кривой;
отнесения эхо-сигнала к первой траектории эхо-сигнала, которая связана с предыдущими эхо-сигналами ранее полученных эхо-кривых, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет тот же знак, что и значение амплитуды упомянутого эхо-сигнала эхо-кривой;
предотвращения отнесения эхо-сигнала к первой траектории эхо-сигнала, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет другой знак относительно значения амплитуды упомянутого эхо-сигнала.
2. Устройство измерения уровня заполнения по п. 1, при этом опорная кривая представлена постоянным значением.
3. Устройство измерения уровня заполнения по п. 1, при этом опорная кривая получена посредством фильтрации ранее полученной или в настоящий момент полученной эхо-кривой.
4. Устройство измерения уровня заполнения по одному из пп. 1-3, в котором модуль получения и обработки сигнала дополнительно предназначен, чтобы выполнять этап:
отнесения эхо-сигнала к другой, второй траектории, если относительное значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет знак, отличный от относительного значения амплитуды упомянутого эхо-сигнала.
5. Устройство измерения уровня заполнения по одному из пп. 1-3, выполненное в качестве радара уровня заполнения.
6. Устройство измерения уровня заполнения по одному из пп.1-3, выполненное как ультразвуковое устройство измерения уровня заполнения.
7. Устройство измерения уровня заполнения по одному из пп. 1-3, выполненное для использования направленных микроволн для измерения уровня заполнения.
8. Способ измерения уровня заполнения наполняемой среды, при этом способ содержит этапы, на которых:
формируют и передают передаваемый сигнал в направлении наполняемой среды;
получают эхо-кривую, соответствующую отраженной части передаваемого сигнала;
идентифицируют, по меньшей мере, один эхо-сигнал эхо-кривой;
определяют относительный знак значения амплитуды эхо-сигнала,
причем относительный знак значения амплитуды является положительным, если средняя амплитуда эхо-сигнала больше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит выше предварительно заданной опорной кривой и
при этом относительный знак амплитуды является отрицательным, если средняя амплитуда эхо-сигнала меньше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит ниже предварительно заданной опорной кривой;
относят эхо-сигнал к первой траектории эхо-сигнала, которая связана с предыдущими эхо-сигналами ранее полученных эхо-кривых, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет тот же знак, что и значение амплитуды упомянутого эхо-сигнала эхо-кривой;
предотвращают отнесение эхо-сигнала к первой траектории эхо-сигнала, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет другой знак относительно значения амплитуды упомянутого эхо-сигнала.
9. Компьютерно-читаемый носитель, который содержит компьютерную программу, которая, при исполнении в процессоре устройства измерения уровня заполнения, инструктирует устройству выполнять этапы:
формирования и передачи передаваемого сигнала в направлении наполняемой среды;
получения эхо-кривой, соответствующей отраженной части передаваемого сигнала;
идентификации, по меньшей мере, одного эхо-сигнала эхо-кривой;
определения относительного знака значения амплитуды эхо-сигнала относительно соответствующего значения амплитуды передаваемого сигнала,
причем относительный знак значения амплитуды является положительным, если средняя амплитуда эхо-сигнала больше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит выше предварительно заданной опорной кривой и
при этом относительный знак амплитуды является отрицательным, если средняя амплитуда эхо-сигнала меньше, чем предварительно определенное опорное значение или если весь эхо-сигнал лежит ниже предварительно заданной опорной кривой;
отнесения эхо-сигнала к первой траектории эхо-сигнала, которая связана с предыдущими эхо-сигналами ранее полученных эхо-кривых, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет тот же знак, что и значение амплитуды упомянутого эхо-сигнала эхо-кривой;
предотвращения отнесения эхо-сигнала к первой траектории эхо-сигнала, если значение амплитуды первого эхо-сигнала из предыдущих эхо-сигналов первой траектории эхо-сигнала имеет другой знак относительно значения амплитуды упомянутого эхо-сигнала.
| СПОСОБ ИММУНОКОРРЕКЦИИ ПРИ ОФТАЛЬМОПАТИЯХ | 1993 |
|
RU2071302C1 |
| US 7823446 B2 02.11.2010 | |||
| US 6690320 B2 10.02.2004 | |||
| US 6535161 B1 18.03.2003. | |||

