Изобретение относится к моделирующей установке, включающей в себя управляющее устройство. Конкретнее, но не ограничиваясь, изобретение относится к моделирующей установке для обучения специалиста.
Традиционно специалисты, такие как паяльщики, изучают свою специальность на работе в качестве ученика. Подмастерье приобретает различные требуемые навыки, пытаясь повторять работу его учителя. Обучение обеспечивает сфокусированный персональный опыт подготовки. Однако эта форма обучения является неизменной, так как время учителя тратится на многих учеников. Более того, по меньшей мере на ранних этапах обучения подмастерье допускает ошибки, которые принесут расходы учителю и удерживает его/ее от найма подмастерьев в будущем.
Курсы профессиональной подготовки развиты для предоставления ученикам начального опыта, необходимого для начала работы в качестве специалиста, с целью уменьшить начальный затратный период обучения. Однако эти курсы имеют относительно высокую стоимость за счет количества ошибок учеников, выполненных на ранних этапах.
Согласно первому аспекту изобретения обеспечено управляющее устройство, содержащее первый участок и второй участок, участки соединены с возможностью вращения, магнитометр, гироскоп, акселерометр и датчик изгиба, причем датчик изгиба выполнен с возможностью измерения относительного угла между первым и вторым участком.
Датчик изгиба может быть потенциометром или фрикционной пластиной.
Управляющее устройство может дополнительно содержать двигатель для сопротивления изменению относительного угла между первым и вторым участками. Двигатель может быть расположен на первом конце первого участка и включать металлический корпус, а гироскоп, акселерометр и магнитометр могут быть размещены на противоположном конце первого участка.
Управляющее устройство может дополнительно содержать датчик давления. Предпочтительно первый или второй участок включает канавку, причем датчик давления размещен в этой канавке.
Варианты осуществления изобретения будут далее описаны путем примера и со ссылкой на чертежи.
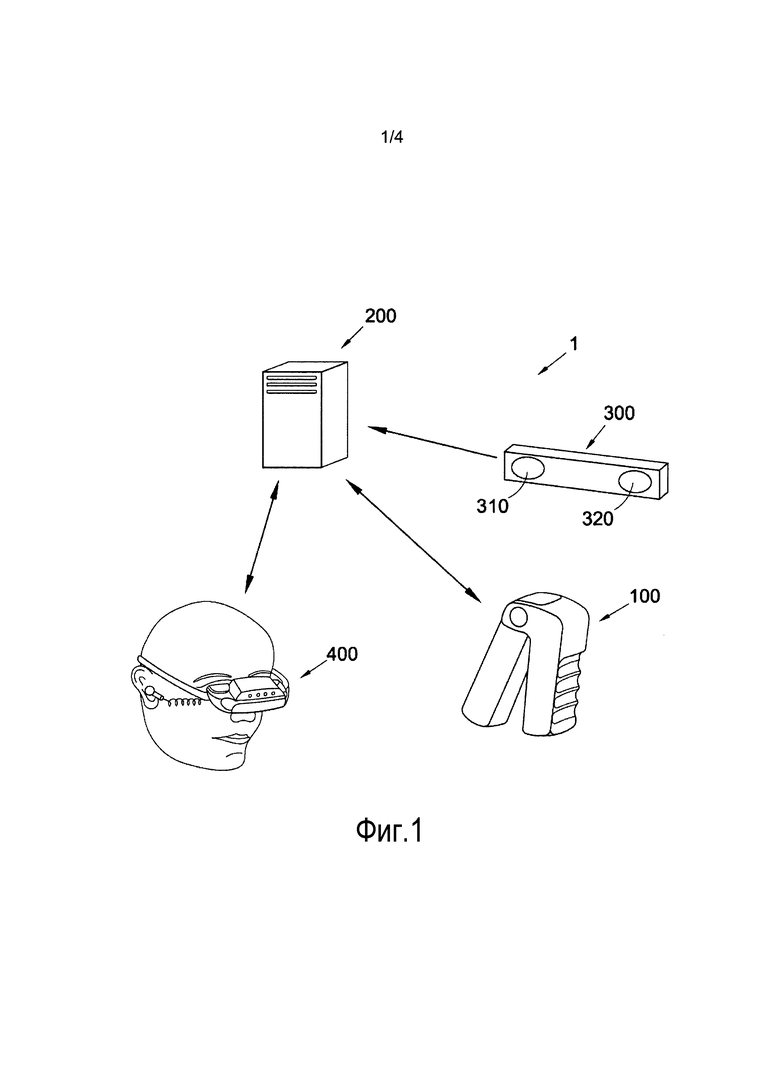
Фиг.1 иллюстрирует моделирующую установку, включающую управляющее устройство варианта осуществления изобретения, также показывая только для ссылки компьютер, устанавливаемый на голове дисплей и блок камеры;
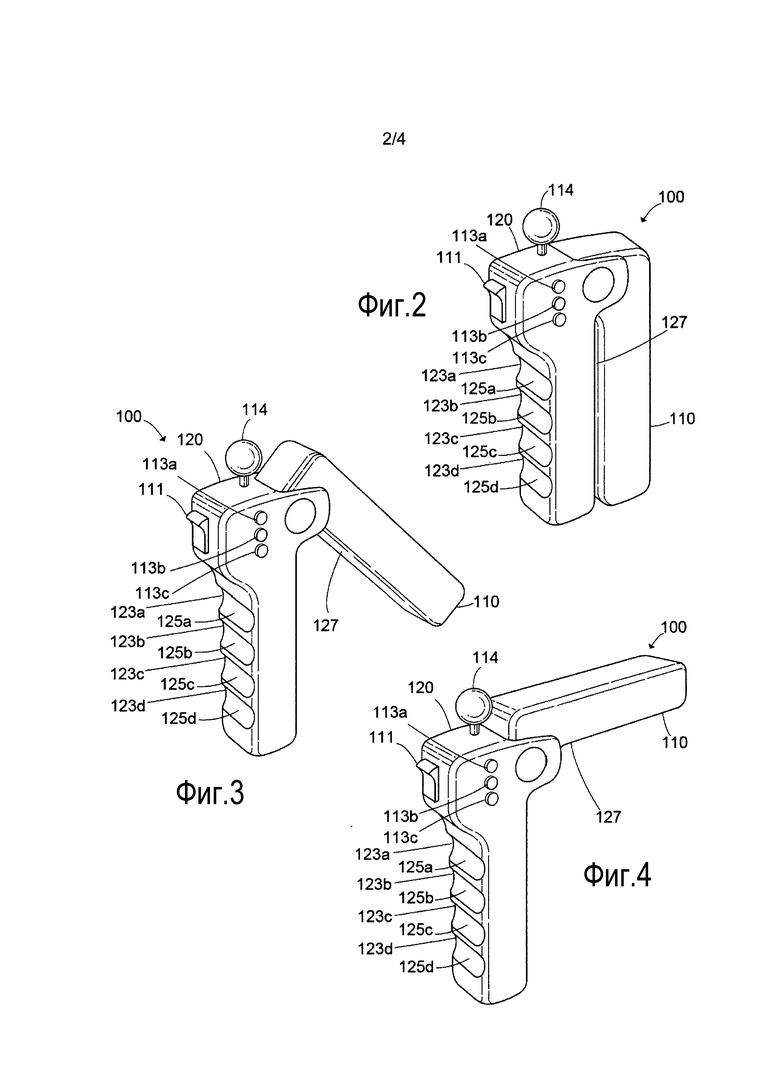
фиг.2 иллюстрирует управляющее устройство согласно фиг.1, показывая первый участок и второй участок в параллельном положении;
фиг.3 иллюстрирует управляющее устройство согласно фиг.1, показывая относительный угол между первым и вторым участком;
фиг.4 иллюстрирует управляющее устройство согласно фиг.1, показывая первый и второй участок в, по существу, перпендикулярном положении;
фиг.5 иллюстрирует внутренний участок управляющего устройства фиг.1, показывая потенциометр, тормозящий двигатель, редуктор и металлический корпус;
фиг.6 иллюстрирует потенциометр, тормозящий двигатель, редуктор и металлический корпус управляющего устройства фиг.1; и
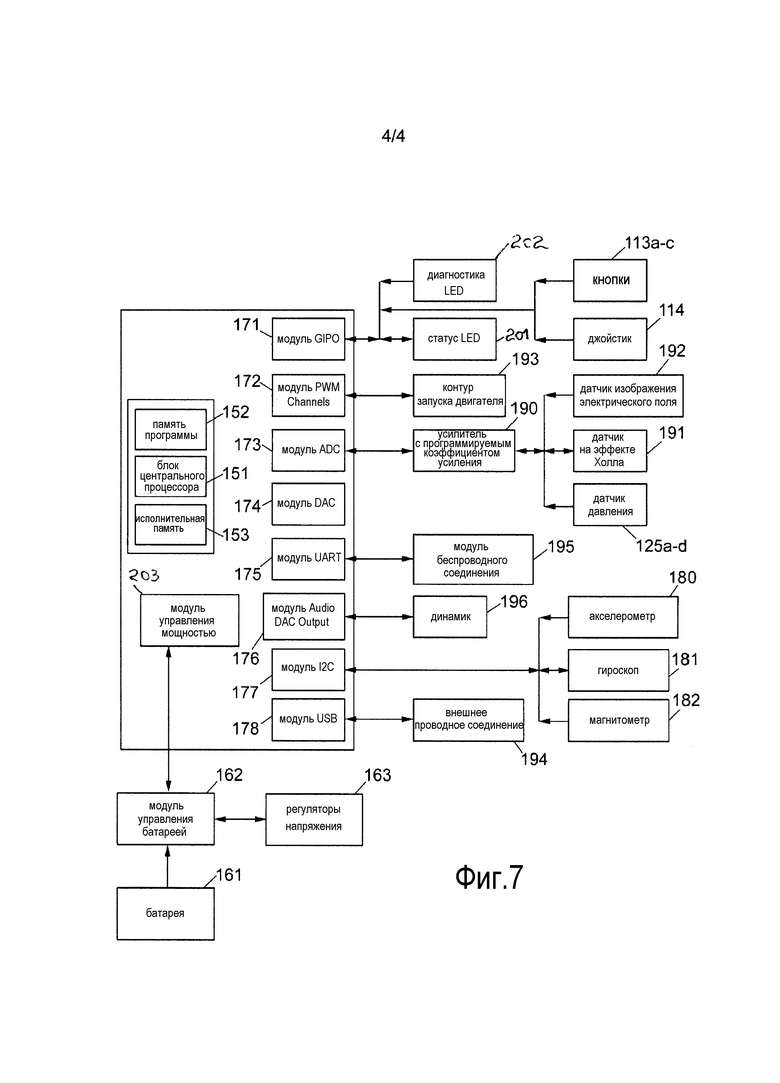
фиг.7 иллюстрирует техническое оснащение управляющего устройства фиг.1.
Фиг.1 иллюстрирует общее представление моделирующей установки 1. Моделирующая установка 1 включает в себя управляющее устройство 100 согласно варианту осуществления изобретения. Моделирующая установка 1 также включает в себя, только для ссылки, компьютер 200, блок 300 камеры и устанавливаемый на голову дисплей 400. Для целей этого описания компьютер 200 выполнен с возможностью запуска компьютерной программы, которая моделирует сценарий обучения, как, например, использование паяльной лампы или изгибание трубы.
Компьютер 200 принимает данные от управляющего устройства 100 и блока 300 камеры. Управляющее устройство 100 включает в себя различные датчики для измерения пространственных характеристик, таких как ускорение и ориентация, и для измерения данных ввода пользователя. Управляющее устройство 100 выводит данные от датчиков в компьютер 200. Блок 300 камеры включает в себя первую камеру 310 и вторую инфракрасную камеру 320 для захвата изображения. Блок 300 камеры выводит данные изображения в компьютер 200.
Компьютер 200 выполнен с возможностью обработки данных из управляющего устройства 100 и блока 300 камеры в виде переменных ввода в компьютерную программу. Управляющее устройство 100 обеспечивает пространственные данные, такие как ускорение и ориентация и данные ввода пользователя, при этом блок 300 камеры обеспечивает изображения, которые могут быть обработаны для определения трехмерного положения управляющего устройства 100. Компьютерная программа, которая может моделировать сценарий обучения, в связи с этим может давать пользователю иммерсивное и точное моделирование реальных навыков, таких как использование паяльной лампы или изгибание трубы. Ниже управляющее устройство 100 моделирующей установки 1 описано более подробно.
Управляющее устройство
Теперь управляющее устройство 100 будет описано со ссылкой на фиг.2-7. Управляющее устройство 100 включает в себя корпус, образованный из первого участка 110 и второго участка 120. Первый участок 110 и второй участок 120 соединены с возможностью вращения на одном конце. Первый участок 110 и второй участок 120 выполнены с возможностью вращаться между параллельным положением, которое показано на фиг.2, где относительный угол равен нулю, и, по существу, перпендикулярным положением, которое показано на фиг.4, где относительный угол равен примерно 90°. В этом варианте осуществления относительный угол в, по существу, перпендикулярном положении равен 95°.
Первый участок 110 включает в себя кнопку 127 завершения, размещенную между первым участком 110 и вторым участком 120. Кнопка 127 завершения выполнена с возможностью нажиматься, когда относительный угол между первым положением 110 и вторым положением 120 достигает нуля (то есть достигает параллельного положения).
Управляющее устройство 100 включает в себя несколько кнопок на нем, включая в себя кнопки 113а-с общего назначения меньшего размера, кнопки 111 общего назначения большего размера и управляемый пальцем джойстик 114. Эти кнопки позволяют пользователю вводить основные команды в компьютерную программу, такие как навигация по меню. В этом варианте осуществления первый участок 110 включает множество LED (не показаны) для отображения статуса или диагностической информации пользователю.
Второй участок 120 включает множество канавок 123а-d для приема пальцев пользователя. Канавки 123а-d позволяют пользователю комфортно держать управляющее устройство 100. Более того, второй участок 120 включает множество датчиков 125а-d давления, размещенных внутри канавок 123а-d. Датчики 125а-d давления выполнены с возможностью измерения давления, прикладываемого к ним, изменением их сопротивления пропорционально давлению. Датчики 125а-d давления могут быть активированы, только когда кнопка 127 закрытия отжата, и включают резиновую оболочку для поглощения удара.
В этом варианте осуществления (который показан на фиг.5 и 6) управляющее устройство включает в себя тормозящий двигатель 131 для сопротивления изменению относительного угла между первым участком 110 и вторым участком 120. В связи с этим тормозящий двигатель 131 размещен на первом конце второго участка 120, где второй участок 120 соединен с возможностью вращения с первым участком 110. Тормозящий двигатель 131 позволяет моделирующей установке воспроизводить сопротивление сгибанию, например, когда пользователь сгибает трубу.
Тормозящий двигатель 131 связан с редуктором 132 для изменения сопротивления изменению относительного угла между первым участком 110 и вторым участком 120. Двигатель 131 и редуктор 132 выполнены так, что сопротивление изменению относительного угла обратно пропорционально электрическому сопротивлению на концах двигателя 131 (т.е. двигатель замкнут накоротко для того, чтобы обеспечивать максимальное сопротивление изменению относительного угла между первым участком 110 и вторым участком 120). Двигатель 131 и редуктор 132 управляются микроконтроллером.
Тормозящий двигатель 131 включает в себя внешний металлический корпус 133, который является прикрепляемым к внутренней поверхности второго участка 120. В этом варианте осуществления внешний металлический корпус 133 является напрессованным литьем к внутренней поверхностью второго участка 120, что улучшает передачу усилия между двигателем 131 и вторым участком 120.
В этом варианте осуществления управляющее устройство включает множество датчиков (объяснены ниже), размещенных внутри противоположного конца второго участка 120 (т.е. противоположно первому концу второго участка 120). В связи с этим внешний металлический корпус 133 продолжается на заданное расстояние от первого конца второго участка 120 так, что эти датчики не покрываются металлическим корпусом 133 двигателя. Таким образом, любые электромагнитные волны, проходящие через устройство, обнаруживаются датчиками без ослабления металлическим корпусом 133 двигателя.
Управляющее устройство 100 также включает в себя датчик изгиба для измерения относительного угла между первым участком 110 и вторым участком 120. В этом варианте осуществления датчик изгиба представляет собой потенциометр 134. Датчик изгиба выдает данные относительного положения первого и второго участка 110, 120, которые могут быть использованы компьютерной программой для симулирования сценария сгибания трубы.
Управляющее устройство 100 также включает в себя создающие вибрации двигатели, которые могут быть использованы для обеспечения физического оповещения пользователя.
Управляющее устройство 100 также включает в себя вход для приема вспомогательного управляющего устройства.
Фиг.7 представляет собой блок-схему, иллюстрирующую техническое оснащение внутри корпуса управляющего устройства 100. Управляющее устройство 100 включает микроконтроллер SOC 150 (включающий множество модулей, описанных ниже), батарею 161, такую как литий-ионный аккумулятор, модуль 162 управления батареей и регуляторы 163 напряжения.
Модуль 162 управления батареей включает зарядное устройство батареи, выполненное с возможностью принимать вход переменного тока. Зарядное устройство включает динамичное управление потоком мощности (DPPM), которое питает управляющее устройство 100 при одновременной и независимой зарядке батареи 161. Модуль управления батареей дополнительно включает контуры расхода топлива и защиты.
Регуляторы 163 напряжения распределяют мощность по модулям на микроконтроллере SOC 150, датчиках и других активных компонентах, описанных ниже.
Микроконтроллер SOC 150 включает CPU 151, память 152 программы и исполнительную память 153, соединенные посредством системной шины. Микроконтроллер SOC 150 дополнительно включает GIPO 171, управление мощностью 172, модули ADC 173, DAC 174, UART 175, Audio DAC Output 176, I2C 177 и USB 178, соединенные посредством периферийной шины.
Модуль GIPO 171 представляет собой цифровой IO, выполненный с возможностью приема данных от кнопок 123а-с, 111 общего назначения большего размера и меньшего размера и джойстика 114. Модуль GIPO 171 также выполнен с возможностью управления LED для обеспечения статуса и диагностической информации пользователю.
Управляющее устройство 100 включает в себя акселерометр 180, гироскоп 181 и магнитометр 182, обеспечивающие девять степеней свободы движения. Три датчика 180, 181, 182 выполнены на монтажной плате. Монтажная плата выполнена с возможностью фильтрации шума от считываний датчиков 180, 181, 182 для обеспечения углов Эйлера или Кватернионов для вывода в виде данных, относящихся к ориентации управляющего устройства 100. Три датчика 180, 181, 182 соединены с микроконтроллером SOC 150 посредством модуля I2C 177, который конфигурирует, инициализирует и калибрует датчики 180, 181, 182.
Датчики 125а-d давления соединены с микроконтроллером SOC 150 посредством усилителя 190 с программируемым коэффициентом усиления и модуля ADC 173. Модуль ADC 173 и усилитель 190 с программируемым коэффициентом усиления также соединяют датчик 191 на эффекте Холла и датчик 192 изображения электрического поля с микроконтроллером SOC 150. Датчик 192 изображения электрического поля используется для бесконтактного обнаружения объектов созданием низкочастотного синусоидального поля. Датчик 192 изображения электрического поля обнаруживает проксимальные объекты изменениями синусоидального поля. Подобным образом, датчик 191 на эффекте Холла измеряет проксимальное магнитное поле.
Модуль ADC 173 выполнен с возможностью приема данных от усилителя 190 с программируемым коэффициентом усиления, преобразования их в цифровой сигнал и передачи в CPU 151 для вычисления.
Микроконтроллер SOC 150 дополнительно включает схему 193 запуска двигателей для запуска двигателей, таких как создающий вибрации двигатель или динамичный тормозящий двигатель. Схема 193 запуска двигателя модулируется модулем PWM 172, который может быть выполнен с возможностью работы без посредничества CPU 151.
Микроконтроллер SOC 150 также включает модуль USB 178 для соединения с внешним устройством USB 194 и модулем UART 175 для взаимодействия с модулем 195 беспроводной связи, например шифратором Bluetooth (RTM) для связи с компьютером 200. Модуль 195 беспроводной связи представляет собой трансивер для передачи данных, собранных от датчиков и устройств ввода, в компьютер 200 и для приема данных обратной связи, например для запуска динамического тормозящего двигателя.
Микроконтроллер SOC 150 также включает модуль 176 вывода Audio DAC для управления динамиком 196 на управляющем устройстве 100.
Опытный читатель поймет, что датчик давления является несущественным признаком. Датчик давления является предпочтительным, так как он допускает дополнительный пользовательский ввод в моделирующую установку 1 так, что пользователь может заниматься определенными обучающими сценариями, такими как паяльная лампа.
Опытный читатель также поймет, что для управляющего устройства 100 несущественно вращаться между параллельным и перпендикулярным положениями. То есть управляющее устройство 100 может вращаться между любыми двумя относительными углами, меньшими или большими 90°.
В вышеуказанном варианте осуществления управляющее устройство 100 использует потенциометр для измерения относительного угла между первым и вторым участком. Опытный читатель поймет, что потенциометр представляет собой только один способ измерения относительного угла, при этом могут быть использованы дополнительные примеры. Например, могут быть использованы фрикционная пластина или шифратор положения, связанные с двигателем. Более того, динамический тормозящий двигатель представляет собой только один пример средства для сопротивления изменению относительного угла между первым и вторым участком. Например, трение может быть достигнуто размещением фрикционных пластин и приложением давления между ними или использованием системы заведенной пружины.
Опытный читатель также поймет, что для металлического корпуса двигателя несущественно отливание единым целым со вторым участком 120. Например, металлический корпус может быть скреплен болтами со вторым участком 120.
Специалист в области техники поймет, что любая совокупность признаков возможна без отклонения от объема изобретения, который заявлен в формуле изобретения.

Изобретение относится к моделирующей установке для обучения специалиста работе с инструментом. Управляющее устройство содержит первый участок и второй участок, которые соединены с возможностью вращения. Магнитометр, гироскоп, акселерометр служат для обеспечения данных, относящихся к пространственной ориентации управляющего устройства. Датчик изгиба выполнен с возможностью измерения относительного угла между первым и вторым участком. Управляющее устройство выполнено с возможностью вывода данных от датчиков на компьютер моделирующей установки, чтобы вынуждать компьютер моделировать программу обучения посредством обработки данных. Техническим результатом изобретения является развитие повышения точности моделирования реальных навыков работы с инструментом. 6 з.п. ф-лы, 7 ил.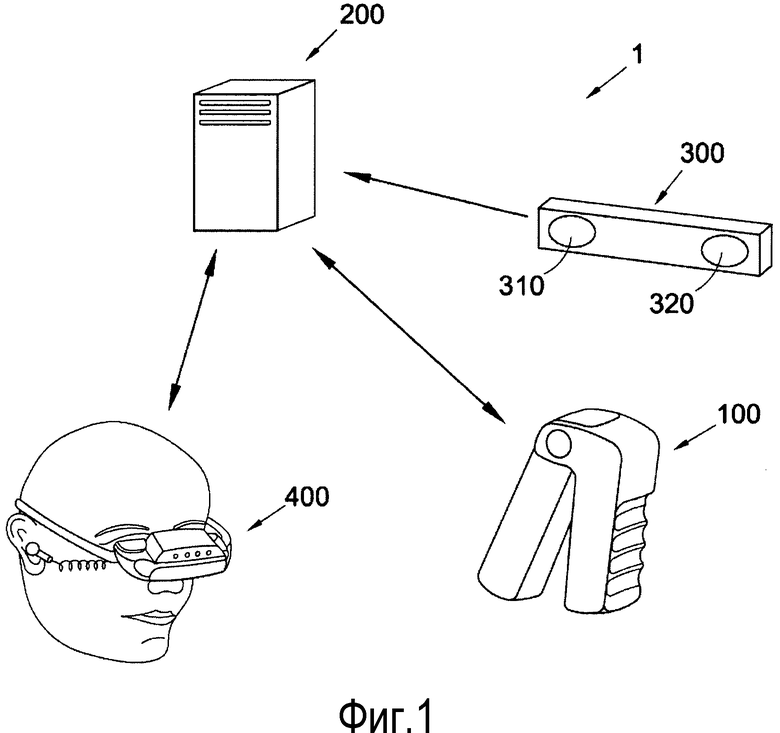
1. Управляющее устройство для моделирующей установки для обучения специалиста, причем управляющее устройство содержит первый участок и второй участок, причем эти участки соединены с возможностью вращения, магнитометр, гироскоп, акселерометр для обеспечения данных, относящихся к пространственной ориентации управляющего устройства, датчики для измерения пользовательских вводов и датчик изгиба, причем датчик изгиба выполнен с возможностью измерения относительного угла между первым и вторым участком; при этом управляющее устройство выполнено с возможностью вывода данных от датчиков на компьютер моделирующей установки, чтобы вынуждать компьютер моделировать программу обучения посредством обработки данных.
2. Управляющее устройство по п. 1, в котором датчик изгиба представляет собой потенциометр.
3. Управляющее устройство по п. 1, в котором датчик изгиба представляет собой фрикционную пластину.
4. Управляющее устройство по любому из предыдущих пунктов, дополнительно содержащее двигатель для сопротивления изменению относительно угла между указанными участками.
5. Управляющее устройство по п. 4, в котором двигатель размещен на первом конце первого участка и включает в себя металлический корпус, а гироскоп, акселерометр и магнитометр размещены на противоположном конце первого участка.
6. Управляющее устройство по п. 1, дополнительно содержащее датчик давления.
7. Управляющее устройство по п. 6, в котором первый или второй участок включает в себя канавку, причем датчик давления размещен в этой канавке.
| WO 2009143208 A2, 26.11.2009 | |||
| JP 2009223169 A, 01.10.2009 | |||
| WO 2005116802 A1, 08.12.2005 | |||
| WO 2006034571 A1, 06.04.2006 | |||
| Тренажер сварщика | 1984 |
|
SU1217151A1 |

