Область техники
Изобретение относится к устройствам регулирования натяжения нитевидных материалов и может использоваться в машинах текстильной промышленности и для оборудования перемотки гибких материалов, таких как проволока, лента и т.п.
Уровень техники
Одним из необходимых условий получения изделий из длинномерных нитевидных материалов с требуемыми техническим характеристиками является обеспечение подачи нитевидного материала в рабочую зону с заданным натяжением.
В частности, в ткацком производстве при формировании ткани на ткацкой машине в процессе подачи и прокладывании уточной нити необходимо поддержание заданного постоянного натяжения нити при каждом прокладывании от зева к зеву. С технологической точки зрения, стабилизация постоянного натяжения уточных нитей в ткани позволяет получить равномерную структуру переплетения уточных и основных нитей, устранить дефекты при формировании левой и правой кромок, а также оказывает положительное влияние на равномерную нагрузку, уработку и удлинение уточной нити.
Поддержание заданного натяжения нити осуществляется с использованием регулятора натяжения нитевидного материала. Конструкция нитенатяжителя должна отвечать следующим основным условиям:
постоянство усилия натяжения нити, возможность его регулирования;
легкое прохождение неравномерностей нити;
быструю реакцию на неравномерность нити или ее обрыв.
На практике известно использование натяжителей двух типов: механические и механические с электромагнитным управлением.
Механические нитенатяжители имеют простую конструкцию, чаще всего, тарельчатого типа, которые настроены на постоянное усилие торможения, создаваемого усилием пружины, действующей на подвижную прижимную часть (как правило, в виде прижимного диска) и через нее на нить, прижимая ее к нижней неподвижной части (нижнему диску). Однако такой технический принцип нитенатяжителя не обеспечивает надежного поддержания постоянного натяжения нитевидного материала и не реагирует на изменение условий прохождения и состояния нити, особенно для нитей с большой неравномерностью по длине. Кроме того, при работе с текстильной нитью, при попадании узелка или подобного порока нить может сместиться к периферии диска и оказаться вне нитенатяжителя. Последнюю проблему можно, в частности, решить за счет конструкции нитенатяжителя с вращающимися дисками, как предлагается, например, в патентной заявке Китая CN 103950794 A, опубл. 30.07.2014 [1].
Эффективность работы нитенатяжителя повышается на основе конструкций с системой активного контроля натяжения, регулирующих силу прижима нитевидного материала с учетом условий прохождения в зоне создания силы прижима. Это обеспечивается конструкциями, работа которых построена на электромагнитном принципе управления.
В известных устройствах нитенатяжителей, с электромагнитным управлением величины силы прижима движущейся нити, проходящей между тормозными элементами (см., например, пат. США US 6224009 (B1), опубл. 01.05.2001 [2]), сила прижима подвижной частью нитенатяжителя изменяется в зависимости от выходного натяжения нити. Для этого чувствительный элемент, с которым взаимодействует нитевидный материал, закрепляется на подвижном сердечнике-штоке, несущим постоянный магнит, охватываемый катушкой, электрически связанной через аналоговый преобразователь с блоком управления на базе микропроцессора, который в свою очередь связан с датчиком положения штока. Изменение положения штока под действием меняющегося натяжения нити фиксируется датчиком положения штока, генерирует сигнал, подаваемый на микроконтроллер, который сравнивает его с сигналом от катушки электромагнита и соответственно измененному положению штока выдает сигнал на изменение величины тока, протекающего через катушку, с созданием силы магнитного поля, вызывающей изменение силы прижима нити к неподвижного элементу тормозящей части нитенатяжителя.
Однако в решении [2] совмещение в одном подвижном узле элемента, воспринимающего нагрузку от нити, чувствительного элемента и исполнительного элемента, управляемого силами магнитного поля, снижает точность и быстродействие регулирования для поддержания заданного натяжения, что снижает преимущества активного контроля и регулирования.
В известном решении по пат. США US 6095449, опубл. 01.08.2000 [3], контроль натяжения нитевидного материала и регулирование натяжения нити осуществляется отдельными узлами: узел датчика натяжения нити и узел торможения нити с плоскостным тормозящим элементом тормозящей части и электромагнитным средством зажима нити, связанными с блоком управления натяжением нити. В данной конструкции нить проходит через три направляющих глазка, между которыми последовательно определены зона тормозящей части и зона чувствительного элемента, в которой осуществляют контроль натяжения нити.
В данном решении нить в зоне чувствительного элемента постоянно нагружена упругим усилием от чувствительного элемента узла датчика натяжения с индуктивной цепью генерирования сигнала рассогласования, соответствующего величине измеренного натяжения нити и подаваемого на блок управления, где выполняется сравнение с заданным значением величины натяжения. Такое решение по блоку датчика натяжения отличается недостаточной надежностью работы из-за возможного нарушения под действием внешних факторов постоянного контакта нити с чувствительным элементом. Из-за переходных процессов, возникающих в контуре датчика натяжения нити, система в целом работает с некоторым запаздыванием, что сказывается на быстродействии работы устройства. Кроме того, использование тормозящего элемента в виде плоскостного элемента создает условия накопления текстильной пыли в зоне торможения нити, что снижает надежность и точность работы устройства.
Подобное решение также используется в устройстве для регулирования натяжения нити по патентной заявке Германии DE 102012005478, опубл. 19.09.2013 [4], которое принято в качестве прототипа, содержащем узел натяжения нити с тормозящей частью и узел датчика натяжения нити, связанные с блоком управления поддержания заданного натяжения нити, направляющие глазки для движущейся нити, два из которых неподвижны, а третий, подвижный, механически связан с узлом датчика натяжения нити. Блок натяжения нити выполнен с электромагнитным исполнительным средством управления тормозящей части тарельчатого типа. Устройству по техническому решению [4] присущи те же недостатки, что и устройству по техническому решению [3].
Раскрытие изобретения
Технической задачей и техническим результатом настоящего изобретения является повышение быстродействия и надежности устройства натяжения нити и точности работы устройства.
Для достижения указанного технического результата предлагается устройство регулирования натяжения нитевидного материала, содержащее узел торможения нити, узел датчика натяжения нити, связанные с блоком управления, и нитепроводящие глазки, в котором узел торможения нити выполнен в виде магнитоподвижной системы на упругой подвеске, содержащей магнитопроводы, магнит и катушку индуктивности, соосно которым установлена тормозящая часть с гибкой тормозной пластиной для взаимодействия с нитью и неподвижной тормозной пластиной, связанная посредством соединительного несущего элемента с мембранами и катушкой индуктивности, причем узел датчика натяжения нити выполнен с тензопреобразователем, состоящим из упругого элемента с наклеенными тензорезисторами и закрепленного на упругом элементе нитепроводящим глазком.
Предпочтительно, тормозная часть состоит из основания с пазами и боковыми щечками и гибкой тормозной пластины, которая своими зацепами устанавливается в упомянутые пазы основания, так что деформация гибкой тормозной пластины в направлении движения нити ограничена упомянутыми боковыми щечками, формирующими профиль гибкой выпуклой тормозной пластины.
Предпочтительно узел торможения нити установлен с возможность поворота относительно узла датчика натяжения нити для обеспечения беспрепятственной заправки нити.
Краткое описание чертежей
На чертежах одни и те же элементы обозначены одни и теми же позициями.
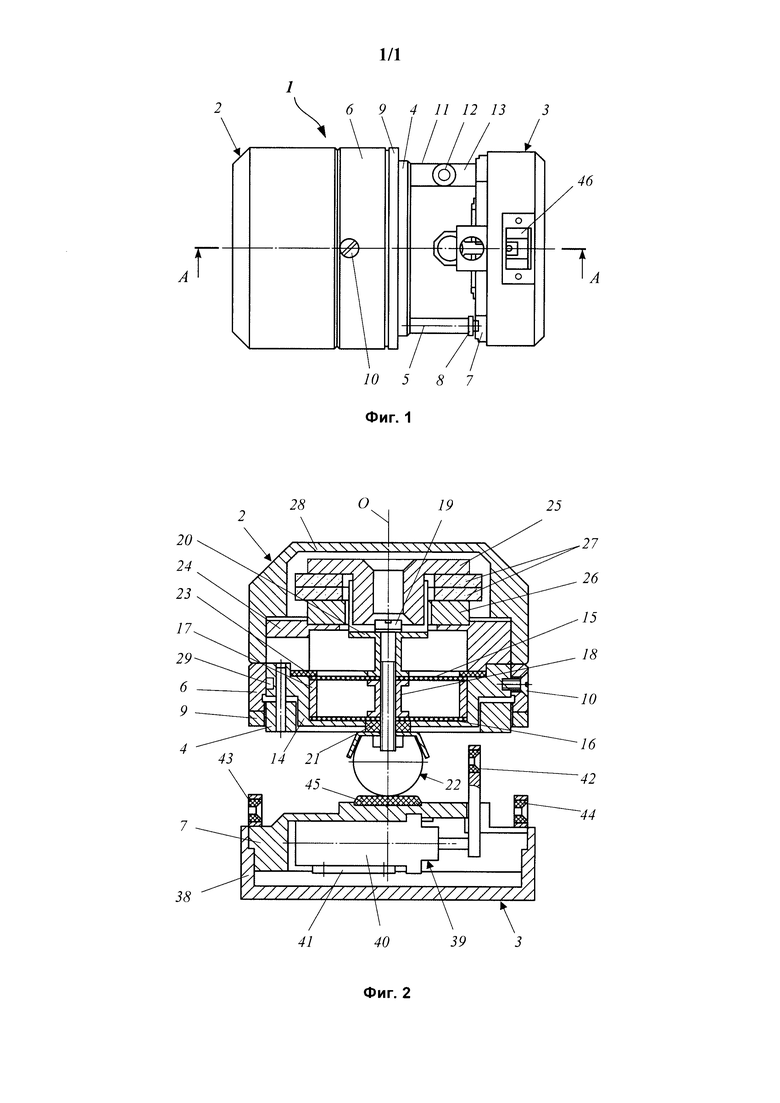
Фиг. 1 - общий вид устройства натяжения нитевидного материала.
Фиг. 2 - сечение устройства натяжения нитевидного материала на фиг. 1 по линии А-А с поворотом на 90°.
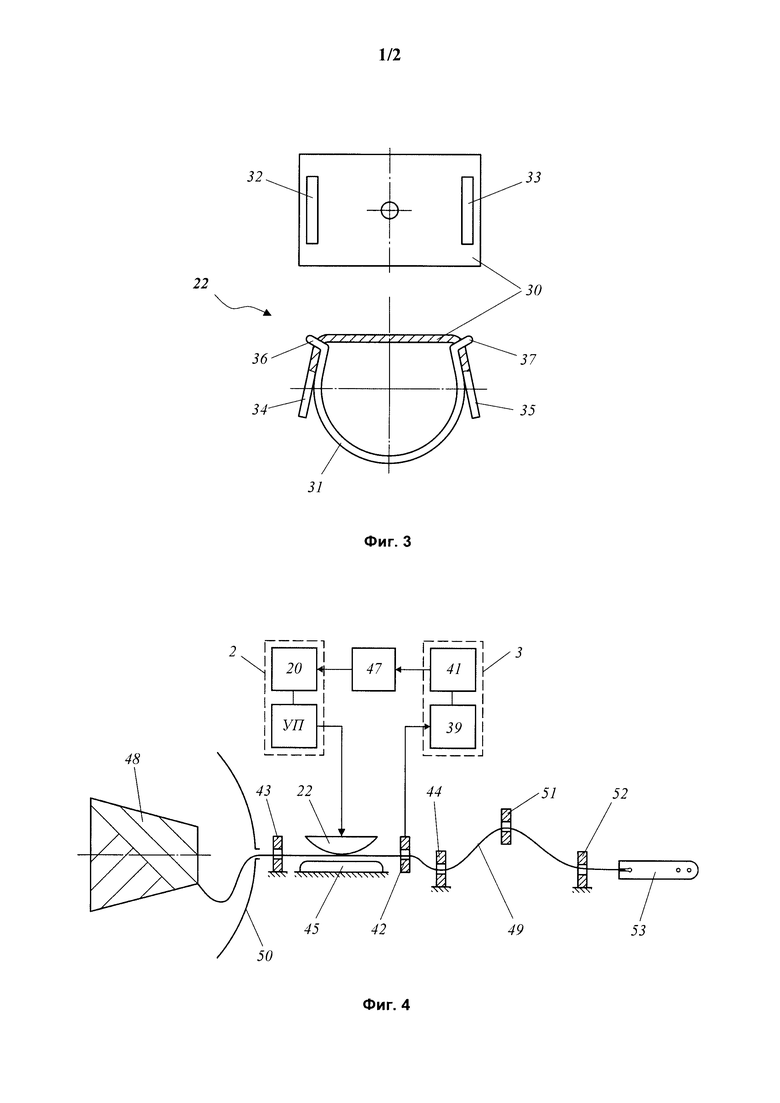
Фиг. 3 - конструкция прижимного элемента.
Фиг. 4 - принципиальная схема управления натяжением нитевидного материала.
Описание изобретения
Устройство регулирования натяжения нитевидного материала по настоящему изобретению и его работа поясняются применительно к текстильным нитям для устройств прокладывания уточной нити механическими средствами введения уточной нити в зев, например на ткацких машинах с микропрокладчиками.
На фиг. 1 представлен общий вид устройства натяжения нитевидного материала, а на фиг. 2 - сечение устройства по линии А-А, повернутого на 90°.
Устройство 1 для натяжения нити содержит два функциональных узла: узел 2 торможения нити с подвижной магнитной системой и узел 3 датчика натяжения нити с тензопреобразователем. Корпус 14 (см. фиг. 1 и 2) магнитной подвижной системы посредством пальца 5, закрепленного в обойме 4, соединенной стяжной гайкой 6 с корпусом магнитной системы, связан с корпусом 7 узла датчика натяжения нити. Палец 5 с резьбой определяет расстояние между корпусом 14 подвижной магнитной системы и корпусом 7 тензопреобразователя. Палец 5 также посредством магнита 8, закрепленного на корпусе 7, образет магнитную защелку, обеспечивающую посредством стопорной гайки 9 и винта 10 фиксацию обоймы 4 корпуса магнитной подвижной системы относительно корпуса 7 тензопреобразователя. На фиг. 1 также показаны сухарь 11, имеющий ось 12, и вилка 13.
Узел 2 торможения нити с магнитной подвижной системой (см. фиг. 2) включает в себя корпус 14, во внутренней полости которого установлены мембраны 15 и 16, разделенные втулками 17 и 18, размещенными по оси «О» мембран, в центральном отверстии которых установлен соединительный несущий элемент, выполненный в виде винта 19. В верхней части винта 19, у его головки, закреплена катушка 20 индуктивности, а на нижней части винта закреплены втулка 21 и тормозящая часть 22, которая будет описана ниже.
Мембраны 15 и 16 закреплены в корпусе 14 через прокладку 23 при помощи винтов (не показаны). Контакты (не показаны) катушки 20 гибким проводом соединены с разъемом (не показан), размещенным на фланце 24. Через фланец 24 со стороны контакта крепится магнитная цепь, состоящая из магнитопроводов 25 и 26 и магнита 27, которая закрывается крышкой 28.
На наружной поверхности корпуса 14 выполнена канавка 29, которая служит направляющей для винтов 10, установленных в стяжной гайке 6, что обеспечивает стяжной гайке возможность вращения и фиксацию в требуемом положении. Посредством резьбы, выполненной на внутренней поверхности стяжной гайки 6, последняя соединяется с обоймой 4, в которой установлен палец 5 с резьбой (см. фиг. 1), определяющий расстояние между корпусом 14 подвижной магнитной системы и корпусом 7 тензопреобразователя. По этой резьбе перемещается стопорная гайка 9, служащая для фиксации обоймы. Вращение и фиксация стяжной гайки 6 в требуемом положении обеспечивается винтами 10. На обойме 4 также расположены сухарь 11, имеющий ось 12, вокруг которой поворачивается вилка 13, запрессованная в корпус 7. При этом, как уже упоминалось, фиксация обоймы 4 в рабочем положении относительно корпуса 7 осуществляется с помощью магнитной защелки, состоящей из пальца 5 и магнита 8, закрепленного на корпусе 7.
Тормозящая часть 22, показанная на фиг. 3, состоит из основания 30 и гибкой тормозной пластины 31. Основание 30 имеет два паза 32 и 33 и две боковые щечки 34 и 35 специальной формы, устанавливаемые под определенными углами к основанию 30. Гибкая тормозная пластина 31 имеет пластинчатые зацепы 36 и 37. В пазы 32 и 33 основания свободно входят пластинчатые зацепы 36 и 37 гибкой тормозной пластины 31. Благодаря нежесткому креплению зацепов в основании можно изменять форму гибкой выпуклой тормозной пластины и, соответственно, усилие торможения в широких пределах путем перемещения основания 30 вдоль вертикальной оси «О». Это позволяет обеспечить регулирование натяжения в более широком диапазоне линейных плотностей движущихся нитей и снизить обрывность нитей за счет стабилизации их натяжения. При этом выпуклая форма тормозной пластины существенно снижает возникновение условий скапливания текстильной пыли в зоне прижима нити к неподвижной пластине.
Узел 3 датчика натяжения нити с тензопреобразователем включает в себя корпус 7 с тензопреобразователем 39, закрепленный в стакане 38 при помощи винтов. Тензопреобразователь 39 состоит из упругого элемента 40 и тензорезисторов 41, наклеенных на него. Упругий элемент тензопреобразователя имеет нитепроводящий глазок 42, а на корпусе 7 закреплены два неподвижных нитепроводящих глазка 43 и 44, через которые проходит движущаяся нить. На корпусе 7 напротив гибкой тормозной пластины 31 тормозящей части 22 закреплена тормозная пластина 45, выполненная из ситала.
Контакты тензопреобразователя соединяются с разъемом 46 (см. фиг. 1), установленным в стакане 38.
Для обеспечения беспрепятственной заправки нити узел 2 торможения нити установлен с возможностью поворота относительно узла 3 датчика натяжения нити. Для этого на обойме 4 установлен сухарь 11, имеющий ось 12, вокруг которой поворачивается вилка 13, запрессованная в корпус 7. При этом фиксация обоймы 4 в рабочем собранном положении устройства относительно корпуса 7 осуществляется с помощью магнитной защелки, состоящей из пальца 5 и магнита 8, закрепленного на корпусе 7.
На фиг. 4 представлена принципиальная схема управления натяжением нити применительно к ткацкой машине с механическим прокладчиком уточной нити, на которой показаны механическая часть и электрическая часть системы управления натяжением нити. Механическая часть включает в себя неподвижные нитепроводящие глазки 43, 44, нитепроводящий глазок 42 тепзопреобразователя 39 узла 3 датчика натяжения нити, упругую подвеску (УП) с тормозящей частью 22 узла 2 торможения нити и тормозную пластину 45. Электрическая часть включает в себя тензорезистор 41 узла 3 натяжения нити, блок управления 47 на базе микроконтроллера с аналого-цифровым преобразователем (АЦП) тензодатчика и катушку 20 индуктивности узла 2 торможения нити.
Блок управления регулирует натяжение в соответствии с заданной циклограммой его работы. В первой фазе устанавливается фиксированный ток, обеспечивающий необходимое усилие прижима, во второй фазе при подаче этого тока производится управление натяжением нити по показаниям тензопреобразователя, в третьей фазе - свободный ход - блок управления подает отрицательной ток полярности на активную исполнительную часть (катушку индуктивности 20).
Уточная нить 49, сматывалась с бобины 48, проходит через глазок баллоноограничителя 50, поступает во входной нитепроводящий глазок 43 устройства натяжения нити. Проходя между тормозящей частью 22 и неподвижной тормозной пластиной 45, уточная нить направляется в нитепроводящий глазок 42 узла 3 датчика натяжения. Далее уточная нить поступает в выходной нитепроводящий глазок 44, глазок 51 компенсатора, направляющий глазок 52 и зажимается губками пружины прокладчика 53 нити утка.
Устройство натяжения уточной нити на ткацкой машине устанавливается на линии заправки утка. Установка начального тормозного усилия производится в два этапа. Сначала вручную устанавливается зазор, равный диаметру движущейся нити, между неподвижной тормозной пластиной 45, закрепленной на корпусе 7 узла 3 датчика натяжения нити, и подвижной гибкой тормозной пластиной 31 тормозящей части 22 узла 2 торможения нити. Это достигается поворотом стяжной гайки 6 с последующим смещением основания 30 вдоль вертикальной оси «О» устройства. При этом перемещаются катушка 20, втулки 17, 18, втулка 21 и основание 30 тормозящей части 22 вниз до касания гибкой тормозной пластины 31 с поверхностью нити.
Затем при помощи потенциометра, содержащегося в блоке управления 47 подается напряжение на катушку 20, которая, воздействуя на основание 30 тормозной части 22, прижимает нить к неподвижной тормозной пластине 45 корпуса 7. В результате при движении нити в ней возникает натяжение, величина которого измеряется в cH, высвечивается на индикаторе и поддерживается за счет электрической связи узла датчика натяжения нити с узлом 2 торможения в зависимости от величины сигнала, подаваемого от тензопреобразователя 39 на катушку индуктивности 20.
При подобной установке тормозных пластин 45 и 31 напряжение, подаваемое на катушку 20, имеет минимальное значение, что способствует меньшему нагреву катушки и повышает надежность работы всего устройства.
Для стабилизации тормозного усилия, которое зависит от формы гибкой тормозной пластины 31, гибкая тормозная пластина 31 изготавливается из термообработанной ленты и монтируется между двумя боковыми щечками 34 и 35 основания 30. Крепление гибкой тормозной пластины 31 осуществляется при помощи зацепов 36 и 37, имеющихся на торцах пластины 31. Сдеформированная пластина 31 зацепами входит в пазы 32 и 33 основания 30 и за счет упругих сил прижимается к боковым щечкам 34 и 35, формирующим за счет своего профиля форму окружности или полуэллиплса, что снижает деформацию гибкой тормозной пластины 31 от воздействия движущейся нити особенно высокой линейной плотности. Приведенное устройство крепления гибкой тормозной пластины 31 в основании 30 позволяет облегчить и ускорить смену гибкой тормозной пластины 31 при обслуживании.
Устройство натяжения нити работает следующим образом.
Составляющая силы натяжения уточной нити 49 преобразуется в вертикальное перемещение нитепроводящего глазка 42 и деформации участка нити с тензорезистором 41 тензопреоборазователя 39. Сигнал с тензопреообразователя поступает через инструментальный усилитель (ИУ) на АЦП микроконтроллера блока управления. По показаниям тензопреоразователя осуществляется программное управление натяжением в соответствии с программным обеспечением микроконтроллера. Управляющий сигнал микроконтроллера подается на катушку 20 индуктивности. Электрический ток, протекающий в катушке 20 индуктивности, создает магнитный поток, который взаимодействует с магнитным потоком, образованным частями 25 и 26 магнитопровода и постоянным магнитом 27. Это взаимодействие магнитных потоков вызывает электродинамическую силу, которая заставляет перемещаться катушку 20, а вместе с ними и соединительный несущий элемент 19. Таким образом, при изменении величины натяжения уточной нити 49 изменяется усилие зажима этой нити между гибкой пластиной 31 тормозящей частью 22, упруго подвешенной посредством мембран 15 и 16, и неподвижной пластиной 45. Настройка натяжения посредством изменения тока начального прижима и калибровки тензорезисторов обрабатывается программой микроконтроллера.
Устройство натяжения нити в предложенном исполнении обеспечивает постоянную подачу нити в зону обработки за счет обеспечения:
- автоматического снижения величины натяжения нитей, выходящей за пределы технологически необходимой;
- снижения амплитуды колебаний величины натяжения с минимальной погрешностью регулирования;
- пригодности для любых видов и линейных плотностей нитей;
- удобства и простоты в обслуживании с возможностью корректировки натяжения в процессе работы оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗ УТОЧНОЙ НИТИ ДЛЯ БЕСЧЕЛНОЧНЫХ ТКАЦКИХ СТАНКОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1991 |
|
RU2015221C1 |
| Нитепроводящая система бытовой вязальной машины | 1987 |
|
SU1420086A1 |
| СИСТЕМА НИТЕПОДАЧИ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 1988 |
|
RU2037582C1 |
| Нитепроводящая система бытовой вязальной машины | 1982 |
|
SU1079708A1 |
| Электромагнитное устройство для торможения уточной нити | 1988 |
|
SU1838475A3 |
| Устройство для подачи нити в петлеобразующую систему трикотажной машины | 1977 |
|
SU903409A1 |
| Устройство для натяжения нити | 1990 |
|
SU1719302A1 |
| УСТРОЙСТВО КОНТРОЛЯ НИТИ ТРИКОТАЖНОЙ МАШИНЫ | 1988 |
|
RU2037583C1 |
| Устройство для прокладывания по меньшей мере одной уточной нити на бесчелночном ткацком станке преимущественно с микропрокладчиками | 1986 |
|
SU1454260A3 |
| Устройство для подачи нити в петлеобразующую систему трикотажной машины | 1977 |
|
SU1044692A1 |
Изобретение относится к устройствам для регулирования натяжения нитевидных материалов и может использоваться в машинах текстильной промышленности и для оборудования перемотки гибких материалов. Устройство регулирования натяжения нитевидного материала содержит узел торможения нити, узел датчика натяжения нити и нитепроводящие глазки. Узел торможения нити выполнен в виде магнитоподвижной системы на упругой подвеске. Подвеска содержит магнитопроводы, магнит и катушку индуктивности, соосно которым установлена тормозящая часть. Тормозящая часть содержит гибкую тормозную пластину для взаимодействия с нитью и неподвижную тормозную пластину, связанную с мембранами и катушкой индуктивности. Узел датчика натяжения нити выполнен с тензопреобразователем. Тензопреобразователь состоит из упругого элемента с наклеенными тензорезисторами. Обеспечивается повышение быстродействия и надежности устройства натяжения нити и точности работы устройства натяжения нити. 2 з.п. ф-лы, 4 ил.
1. Устройство регулирования натяжения нитевидного материала, содержащее узел (2) торможения нити, узел (3) датчика натяжения нити, связанные с блоком управления, и нитепроводящие глазки, в котором узел (2) торможения нити выполнен в виде магнитоподвижной системы на упругой подвеске, содержащей магнитопроводы (25, 26), магнит (27) и катушку (20) индуктивности, соосно которым установлена тормозящая часть (22) с гибкой тормозной пластиной (31) для взаимодействия с нитью и неподвижной тормозной пластиной (45), связанная посредством соединительного несущего элемента (19) с мембранами (15, 16) и катушкой индуктивности (20),
причем узел (3) датчика натяжения нити выполнен с тензопреобразователем (39), состоящим из упругого элемента (40) с наклеенными тензорезисторами (41) и закрепленного на упругом элементе нитепроводящего глазка (42).
2. Устройство по п. 1, отличающееся тем, что тормозная часть (22) состоит из основания (30) с пазами (32, 33) и боковыми щечками (34, 35) и гибкой тормозной пластины (31), которая своими зацепами (36, 37) устанавливается в упомянутые пазы основания, так что деформация гибкой тормозной пластины в направлении движения нити ограничена упомянутыми боковыми щечками, формирующими профиль гибкой выпуклой тормозной пластины.
3. Устройство по п. 1, отличающееся тем, что узел (2) торможения нити установлен с возможностью поворота относительно узла (3) датчика натяжения нити для обеспечения беспрепятственной заправки нити.
| DE 102012005478 A1, 19.09.2013 | |||
| EP 1072707 A1, 31.01.2001 | |||
| Устройство для выравнивания колебаний натяжения длинномерного изделия при намотке | 1978 |
|
SU792320A1 |
| Регулятор натяжения нити | 1975 |
|
SU538967A1 |

