Способ контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа предназначен для мониторинга состояния телемеханизированных добывающих и паронагнетательных скважин, погружного оборудования на месторождении добычи нефти.
Изобретение относится к области вычислительной техники, применяемой в нефтяной промышленности, а именно к информационным системам автоматизации управления нефтедобывающего предприятия.
Близким по способу применения нейросетевого алгоритма самоорганизующихся карт Кохонена (СКК) к анализу цифровых данных является способ нейросетевого анализа сердца [2]. Изобретение [2] относится к медицине, в частности к кардиологии, и может быть использовано для оценки состояния по данным электрокардиографического обследования пациента при скрининге или в условиях скорой и неотложной помощи. Техническим результатом является усовершенствование алгоритма нейросетевого анализа электрокардиосигнала. Способ содержит этапы, на которых осуществляют формирование обучающей выборки в виде множества (k-1)*m n-размерных векторов справочной информации, построение решающих правил и обучение k*L (L - количество отведений) нейронных сетей для анализа каждого из k состояний сердца в каждом отведении. Затем производят регистрацию электрокардиосигнала пациента, его предварительную обработку и представление в виде n-размерного вектора. Нейросетевой анализ осуществляют путем сравнения n-размерного вектора с множеством (k-1)*m n-размерных векторов справочной информации. По результатам нейросетевого анализа осуществляют выбор k-го состояния сердца, у которого выявлено максимальное количество признаков.
Основными отличиями предлагаемого способа контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа данных телеметрии являются:
1. использование зависимого параметра в нейросетевом анализе;
2. вычисление прогнозных (в соответствие с картой Кохонена) значений зависимого параметра;
3. вычисление разницы между расчетным и замеренным значениями зависимого параметра;
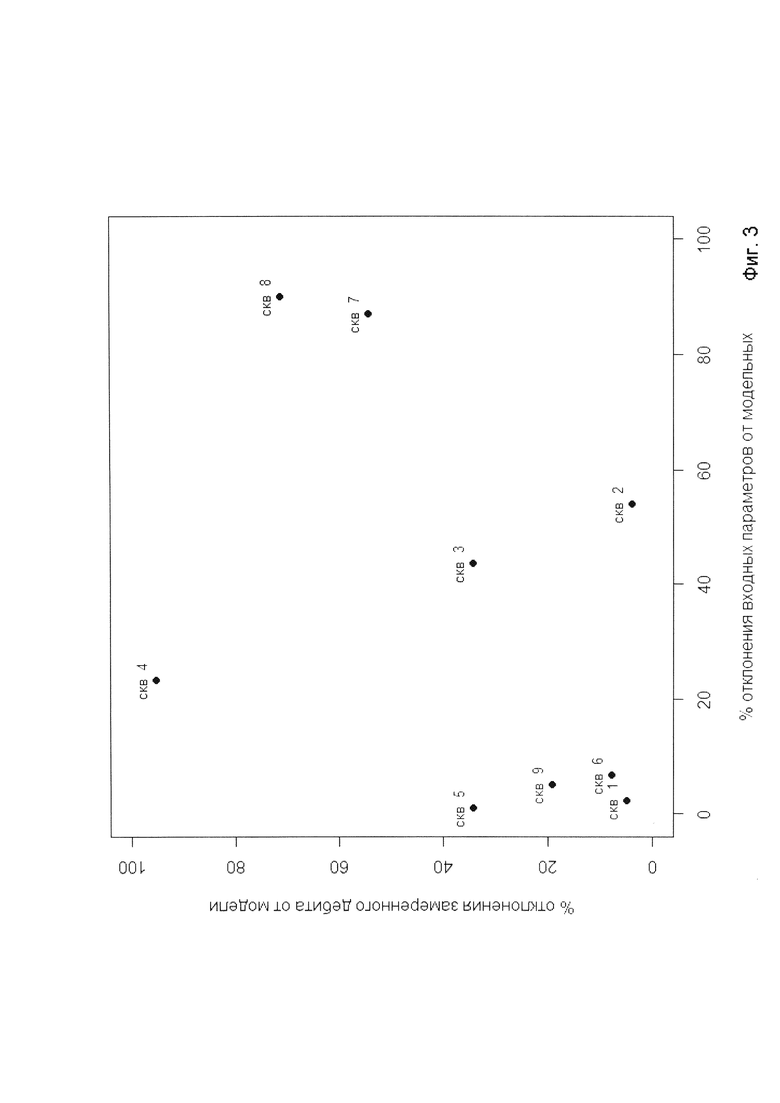
4. представление результатов работы алгоритма в виде совместного графика двух переменных: средней дистанции между векторами входных параметров и вектором модели для каждой скважины, и разницы между значениями расчетного и замеренного значения зависимого параметра для каждой скважины;
5. возможность выбора объектов на топографической карте.
В качестве независимого параметра модели используется параметр, величина которого влияет на какую-либо другую величину (значение зависимого параметра), представленную в модели.
Техническим результатом является появление конкретного способа контроля функционирования нефтепромысловых объектов и погружного оборудования по данным телеметрии на месторождениях добычи нефти.
Способ контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа, состоящий в том, что автоматизированная система осуществляет подготовку данных из архива в виде n-размерных векторов состояний скважин в соответствии с определенными оператором скважинами и интервалом формирования выборки для обучения, в результате обучения формируются карты Кохонена, формируется выборка данных из архива базы в виде n-размерных векторов состояний скважин в соответствии с определенными оператором скважинами и интервалом формирования выборки для анализа, в соответствии с полученными данными производится нейросетевой анализ, заключающийся в сравнении векторов состояний с моделью, способ отличается тем, что оператор имеет возможность выбора объектов для анализа и для построения карт Кохонена на топографической карте, алгоритм нейросетевого анализа использует зависимый параметр, вычисляются прогнозные значения зависимого параметра, вычисляется разница между расчетным и замеренным значениями зависимого параметра, результаты работы алгоритма представляются в виде совместного графика двух переменных: средней дистанции между векторами входных параметров и вектором модели для каждой скважины, и разницы между значениями расчетного и замеренного значения зависимого параметра для каждой скважины.
Нефтепромысловые объекты на месторождениях нефти оборудованы погружными и наземными системами телеметрии. Количество параметров, поступающих с одной скважины, достигает семи десятков. Наземные и погружные системы телеметрии имеют свои АРМ (автоматизированные рабочие места), позволяющие производить мониторинг состояния скважин и погружного оборудования на основе анализа графиков замеров параметров. Совместный анализ поступающих параметров существующими автоматизированными системами не производится.
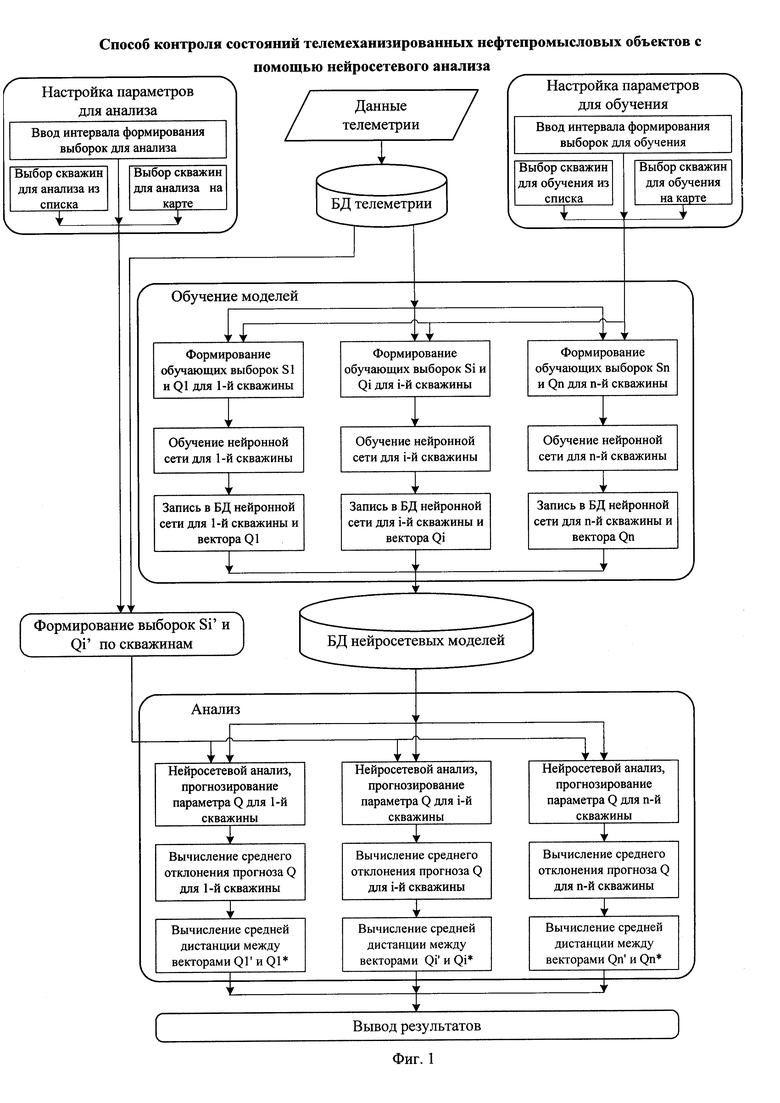
Предложенный способ изложен на примере следующих параметров: температура на приеме насоса, давление на приеме насоса, мощность, расход жидкости и представлен на фиг. 1. Предложенный способ может использоваться для контроля любых значимых параметров функционирования телемеханизированных нефтепромысловых объектов, включающих в себя один независимый параметр и несколько зависимых. Способ контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа содержит следующие этапы:
1. Сбор телеметрической информации в единую базу данных.
2. Настройка параметров для обучения. Осуществляется ручной ввод интервала формирования выборок данных для обучения, а так же выбор скважин для обучения из списка или на карте.
3. Настройка параметров для анализа позволяет вводить интервал формирования выборки данных для анализа, выбирать скважины из списка или на карте.
4. Обучение нейросетевых моделей осуществляет формирование обучающей выборки векторов состояний нефтепромысловых объектов (отдельный набор для каждой скважины, всего n скважин) Si=(Tpi, Ppi, Ni) и векторов Qi в отдельные моменты времени, где Si - вектор состояния, который содержит зависимые параметры: Tpi - температура на приеме насоса, Ppi - давление на приеме насоса, Ni - мощность; Qi - расход жидкости является независимым параметром; обучение нейронных сетей; запись в БД нейронных сетей и векторов Qi.
5. Формирование выборок векторов состояний нефтепромысловых объектов (отдельный набор для каждой скважины) в отдельные моменты времени 

6. Расчет прогнозного вектора 


7. Вывод результатов: построение графиков
Необходимо отметить, что в нейросетевом алгоритме самоорганизующихся карт Кохонена [1] используются следующие параметры:
- при инициализации карты вектору веса присваивается значение случайного наблюдения из входных данных;
- в качестве функции соседства используется гауссовская функция 
Разница между расчетным и замеренным значениями расхода жидкости рассчитывается следующим образом: 
Дистанция между векторами

Процесс обучения начинается с выборки данных, поступающих из Блока данных телеметрии 1 в БД телеметрии 2. Параметры выборки задаются в Модуле настройки для обучения 3. Полученные векторы передаются в самообучающуюся карту Кохонена (Обучающий модуль 5) с заданным количеством узлов, которые представлены в двумерном евклидовом пространстве в виде гексагональной решетки. В результате самообучения формируются и записываются в Базу данных нейросетевых моделей 6 узлы, содержащие в себе вектора модели.
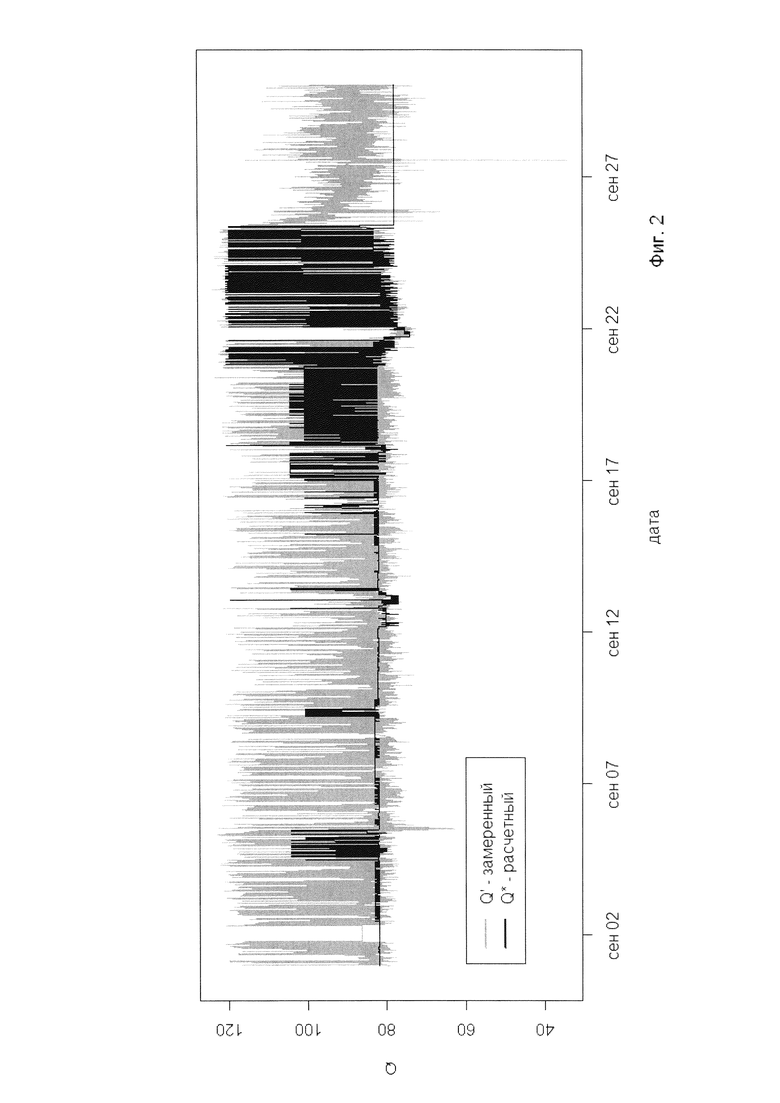
Выборка векторов для анализа производится из архива Базы данных телеметрии 2, по параметрам, заданным в Модуле настройки для анализа 4. Далее в Блоке 7 производится формирование выборки Si′ и Qi′ по скважинам. При размещении на карте вектора вновь пришедшего состояния, в Аналитическом модуле 8 определяется вектор-победитель. Вычисляется прогнозное значение зависимого параметра для каждого состояния. График замеренных и прогнозных значений зависимого параметра отображен на Фиг. 2. Так же вычисляется дистанция между вектором данных и вектором модели, и разница между расчетным и замеренным значением зависимого параметра. Данные значения рассчитываются для всех векторов состояний, поступивших на вход, затем рассчитывается среднее значение. Фиг. 3 показывает способ построения графика средних значений дистанции и разницы между расчетным и замеренным значением. На графике значения каждого из двух критериев располагаются на одной из осей координат. Вывод результатов 9 содержит график замеренных и прогнозных значений зависимого параметра и график дистанции и разницы между расчетным и замеренным значением.
Средние значения дистанций и разницы между расчетным и замеренным значениями зависимого параметра характеризуют состояние объекта на рассматриваемом промежутке времени. Нормирование вычисленных коэффициентов позволяет произвести сравнительный анализ состояний различных скважин.
Большое значение одного из вычисленных критериев может характеризовать сбой в работе телеметрии или смену режима работы объекта. Величина вычисленного критерия анализируется относительно критериев вычисленных для других скважин. В случае, если один или оба критерия на одной из скважин значительно превышает значения критериев вычисленных для других скважин, требуется анализ данных экспертом, и в случае определения данного участка работы скважины как нормального, требуется переобучение карты Кохонена с включением в обучающую выборку нового участка. Данная ситуация характеризуется тем, что данные, на которых производилось обучение модели, не включали подобных состояний объекта.
ИСТОЧНИКИ ИНФОРМЦИИ
1. Kohonen, Т., Self-Organizing Maps, Second Edition, Berlin: Springer - Verlag, 1997.
2. Патент РФ №2461877. Способ нейросетевого анализа состояния сердца. Бодин О.Н., Волкова Н.А., Логинов Д.С., Рябчиков Р.В., Фунтиков В.А.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕЙРОСЕТЕВОГО АНАЛИЗА СОСТОЯНИЯ ТЕЛЕМЕХАНИЗИРОВАННЫХ НЕФТЕПРОМЫСЛОВЫХ ОБЪЕКТОВ | 2014 |
|
RU2598786C2 |
| СПОСОБ НЕЙРОСЕТЕВОГО АНАЛИЗА ДАННЫХ ТЕЛЕМЕТРИИ ПО ФОНДУ СКВАЖИН | 2013 |
|
RU2571470C2 |
| СПОСОБ НЕЙРОСЕТЕВОГО АНАЛИЗА СОСТОЯНИЯ СЕРДЦА | 2011 |
|
RU2461877C1 |
| СИСТЕМА СТАТИСТИЧЕСКОГО И НЕЙРОСЕТЕВОГО АНАЛИЗА ДАННЫХ ТЕЛЕМЕТРИИ НЕФТЕПРОМЫСЛОВЫХ ОБЪЕКТОВ | 2014 |
|
RU2598785C2 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445598C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745136C1 |
Изобретение относится к способам мониторинга состояния телемеханизированных скважин, погружного оборудования на месторождении добычи нефти. Техническим результатом является появление конкретного способа контроля функционирования нефтепромысловых объектов и погружного оборудования по данным телеметрии на месторождениях добычи нефти. Способ контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа, заключается в подготовке данных из архива в виде n-размерных векторов состояний скважин, формировании карты Кохонена, формировании выборки данных из архива базы в виде n-размерных векторов состояний скважин. Алгоритм нейросетевого анализа использует зависимый параметр, вычисляются прогнозные значения зависимого параметра, вычисляется разница между расчетным и замеренным значениями зависимого параметра. Результаты работы алгоритма представляются в виде совместного графика двух переменных: средней дистанции между векторами входных параметров и вектором модели для каждой скважины и разницы между значениями расчетного и замеренного значения зависимого параметра для каждой скважины. 3 ил.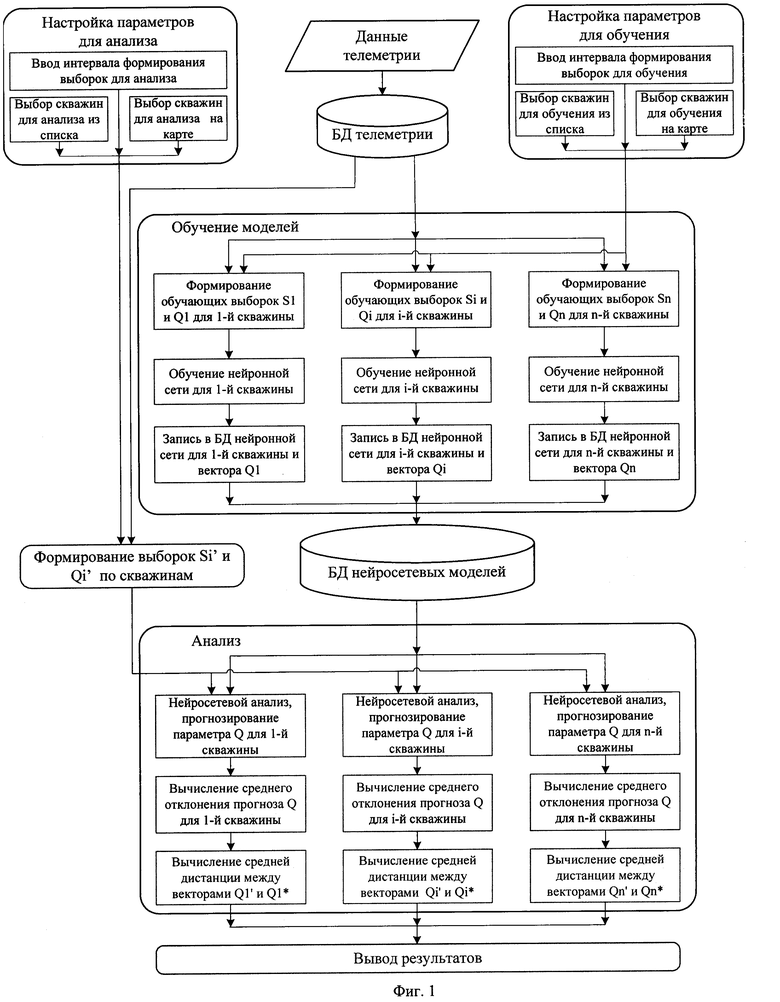
Способ контроля состояний телемеханизированных нефтепромысловых объектов с помощью нейросетевого анализа, состоящий в том, что автоматизированная система осуществляет подготовку данных из архива в виде n-размерных векторов состояний скважин в соответствии с определенными оператором скважинами и интервалом формирования выборки для обучения, в результате обучения формируются карты Кохонена, формируется выборка данных из архива базы в виде n-размерных векторов состояний скважин в соответствии с определенными оператором скважинами и интервалом формирования выборки для анализа, в соответствии с полученными данными производится нейросетевой анализ, заключающийся в сравнении векторов состояний с моделью, способ отличается тем, что оператор имеет возможность выбора объектов для анализа и для построения карт Кохонена на топографической карте, алгоритм нейросетевого анализа использует зависимый параметр, вычисляются прогнозные значения зависимого параметра, вычисляется разница между расчетным и замеренным значениями зависимого параметра, результаты работы алгоритма представляются в виде совместного графика двух переменных: средней дистанции между векторами входных параметров и вектором модели для каждой скважины, и разницы между значениями расчетного и замеренного значения зависимого параметра для каждой скважины.
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА СТОХАСТИЧЕСКОГО ИЗУЧЕНИЯ ПЛАСТА ПРИ НЕФТЕПРОМЫСЛОВЫХ ОПЕРАЦИЯХ | 2008 |
|
RU2496972C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

