Предполагаемое изобретение относится к способам диагностики технического состояния газотурбинного двигателя (ГТД) с применением нейронных сетей.
Известен способ диагностики технического состояния двигателя, при котором выбирают параметры, подлежащие контролю, регистрируют эти параметры на диагностируемом ГТД, формируют векторы входных и выходных параметров, полученных путем измерений с помощью датчиков, и обрабатывают полученные данные с помощью нейронных сетей типа персептрон. Нейронную сеть предварительно обучают «с учителем». По полученным данным строят кривые состояния, являющиеся диагностическими нейромоделями процессов, происходящих в диагностируемом ГТД при его исправном состоянии и состоянии с различными неисправностями. Затем производят анализ технического состояния ГТД по этим моделям и делают вывод о его изменении [П.И.Раков. Соверешенствование процесса диагностирования узлов проточной части авиационных ГТД типа ПС-90 в условиях эксплуатации применением нейро-сетевых методов. Автореферат на соискание ученой степени к.т.н., Москва, 2009].
Указанный способ позволяет проводить обработку данных с учетом технического состояния двигателя в прошлом, т.е. анализ временных рядов. Однако он не позволяет производить оценку технического состояния двигателя в динамике с учетом особенностей происходящих в двигателе процессов, т.к. обработка временных рядов в заявленном способе выполняется в виде алгебраических моделей, реализующих зависимость диагностического параметра от времени наработки, а не от предыдущего значения диагностического параметра.
Другим недостатком такого способа, является невозможность диагностики технического состояния двигателя, перечень неисправных состояний которого неизвестен заранее, а может быть выявлен только в процессе эксплуатации, т.к. используются априорно известные классы неисправностей, заложенные в нейросетевую модель в виде обобщенных характеристик определенного типа двигателей, что требует для обучения нейронной сети знать значения выходных параметров и, кроме того, не позволяет реализовать индивидуальный подход к объекту диагностирования.
Также известен способ диагностики технического состояния газотурбинного двигателя, при котором выбирают параметры, подлежащие контролю, определяют исходные значения этих параметров, а также регистрируют эти параметры на диагностируемом ГТД с помощью датчиков, определяют отклонения значений зарегистрированных параметров от исходных, формируют векторы входных параметров. Полученные данные обрабатывают с помощью нейронной сети Кохонена. Нейронную сеть предварительно обучают и проводят формирование структуры классов (кластеризацию) по обучающей выборке с указанием априорно известной структуры классов. При диагностике формируют выходные сигналы сети, выбирают нейрон с максимальным значением сигнала, определяют класс, к которому он относится, и делают вывод об изменении в техническом состоянии двигателя [С.В.Жернаков. Применение технологии нейронных сетей для диагностики технического состояния авиационных двигателей. Научно-практический журнал ИжГТУ «Интеллектуальные системы в производстве», 2006 г., №2, стр.70-80].
В данном способе устраняется один из недостатков предыдущего тем, что структура классов состояний формируется динамически при помощи нейронной сети Кохонена так, что количество классов заранее неизвестно. Однако дальнейшая реализация данного способа предусматривает, что все полученные классы идентифицируются по уже известной априорной структуре, определенной разработчиком диагностической модели. А обучение нейронной сети осуществляют по априорным данным, характеризующим известные классы неисправностей. Поэтому при возникновении иных неисправностей оценка технического состояния двигателя не может быть произведена.
Кроме того, этот способ не обеспечивает отслеживание технического состояния ГТД в процессе развития неисправности, т.е. не позволяет проводить обработку временных рядов, т.к. выполняет только оценку текущего технического состояния, без учета технического состояния в прошлом (не формируется авторегрессионая зависимость), поэтому не допускает выявления процессов развития неисправностей ГТД на ранних стадиях.
Техническим результатом, на достижение которого направлено предлагаемое решение, является расширение технологических возможностей способа определения технического состояния газотурбинного двигателя путем обеспечения возможности выявления новых классов, характеризующих неисправности двигателя, выявления неисправностей на ранних стадиях и отслеживания технического состояния двигателя в динамике.
Заявляемый технический результат достигается тем, что при реализации способа диагностики технического состояния ГТД выбирают параметры, подлежащие диагностическому контролю, определяют исходные значения этих параметров, а также регистрируют параметры на диагностируемом ГТД с помощью датчиков и определяют отклонения значений зарегистрированных параметров от исходных значений. Затем формируют из этих отклонений векторы входных параметров, обрабатывают полученные данные с помощью нейронной сети Кохонена, которую предварительно обучают, формируют структуры классов по обучающей выборке, формируют выходные сигналы сети, выбирают нейрон с максимальным значением сигнала, определяют класс, к которому он относится, и делают вывод об изменении в техническом состоянии двигателя,
Новым в предлагаемом способе является то, что исходные характеристики контролируемых параметров определяют на диагностируемом двигателе в заведомо исправном его состоянии, например в процессе приемо-сдаточных испытаний в виде математических зависимостей, назначают эталонный промежуток N времени, производят последовательную регистрацию каждого параметра с выбранным интервалом в пределах эталонного промежутка N времени. Регистрацию параметров для последующего диагностического контроля производят за пределами этого промежутка времени и, после определения отклонений каждого из этих параметров от исходной характеристики, производят сглаживание величин отклонений. Обучающую выборку для нейронной сети Кохонена формируют из данных эталонного промежутка N времени, для чего формируют наборы исходных кортежей по m последовательных сглаженных значений отклонений параметра в каждом, при этом первый кортеж каждого набора начинают формировать с первого сглаженного значения отклонения, а последующие путем сдвига на одно значение, определяют статистические характеристики для каждого из сформированных кортежей, нормируют параметры исходного кортежа относительно статистических характеристик для каждого набора исходных кортежей и формируют дополнительные кортежи. Вектор входных параметров для нейронной сети формируют из исходного и дополнительного кортежей, а также статистических характеристик исходного кортежа и после обработки полученных данных, в процессе которой выполняется обучение и кластеризация нейронной сети Кохонена, составляют список нейронов, характеризующий классы состояния двигателя. Из отклонений значений параметров для диагностического контроля от исходных характеристик аналогично формируют набор кортежей, после кластерного анализа которого и выбора нейрона с максимальным значением выходного сигнала сопоставляют этот нейрон со списком нейронов, характеризующим классы состояния двигателя. Вывод об отсутствии изменений в техническом состоянии двигателя делают при наличии выбранного нейрона в составленном списке.
На прилагаемых графических материалах, поясняющих сущность способа, изображено:
Фиг.1 - Пример представления сглаженных значений отклонений параметров эталонного промежутка N времени в режиме «движущегося окна».
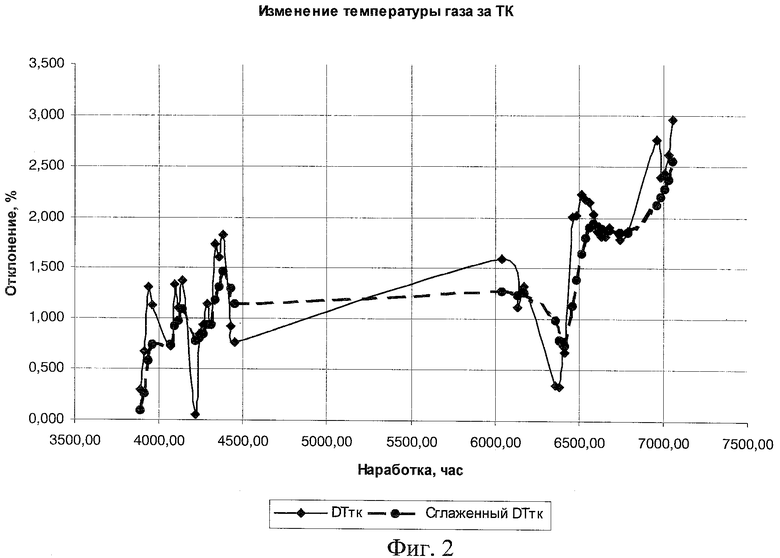
Фиг.2 - Тренд параметра отклонения температуры газа за турбиной двигателя ГТД-6РМ.
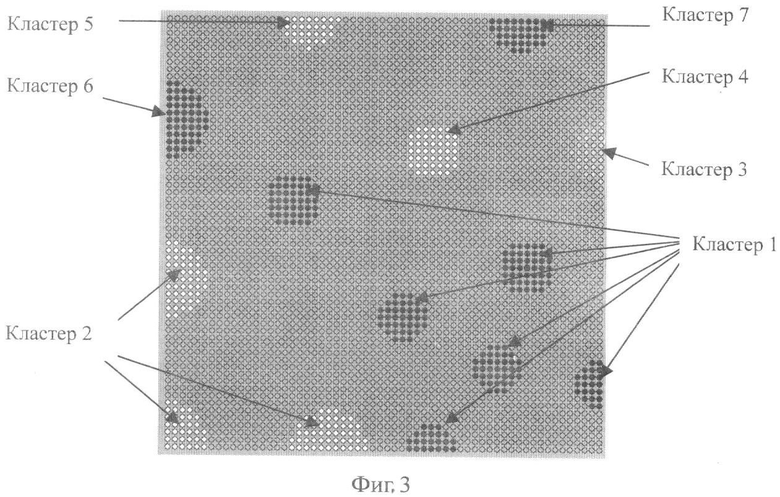
Фиг.3 - Топографическая карта Кохонена после обучения и кластеризации.
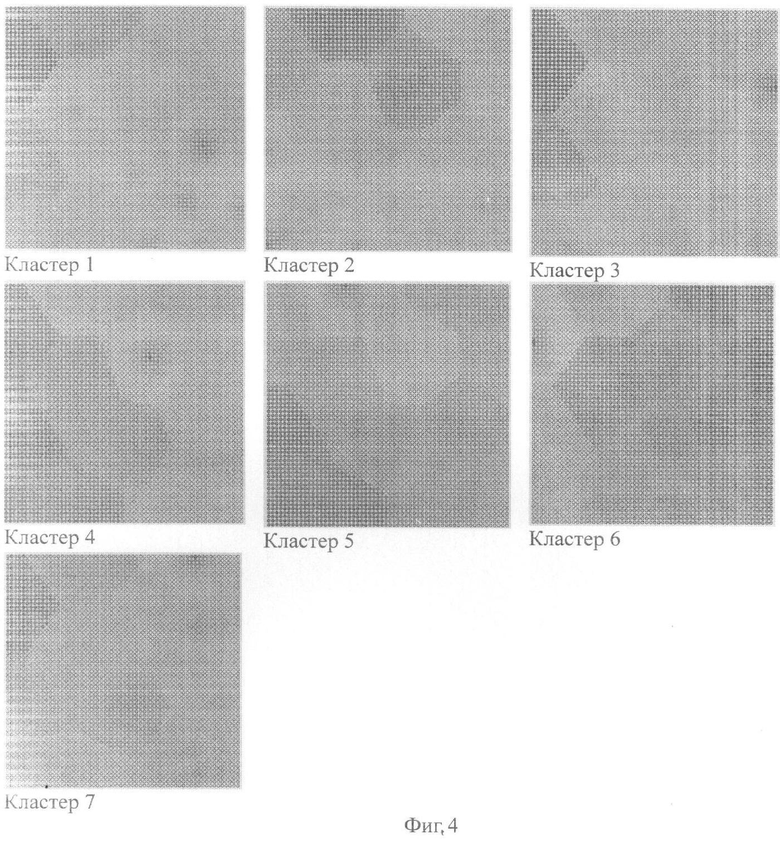
Фиг 4 - Топографические карты выходов начальных классов.
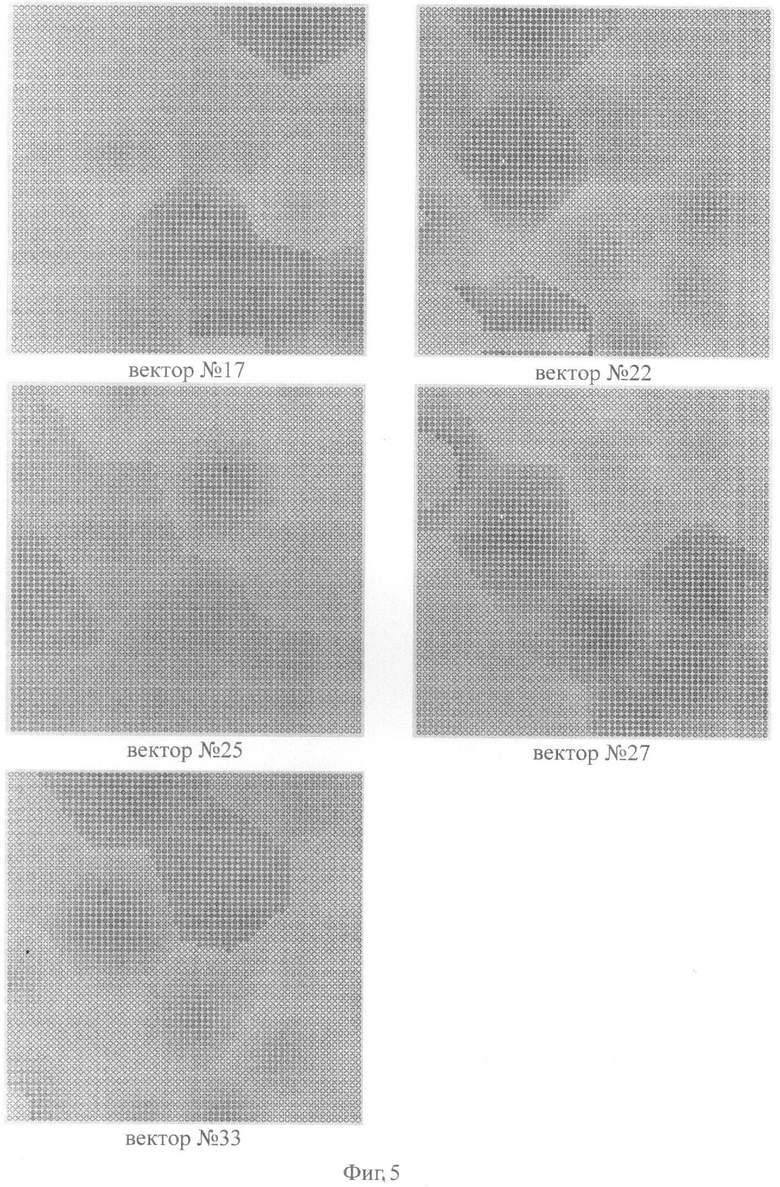
Фиг 5 - Топографические карты выходов для нового класса.
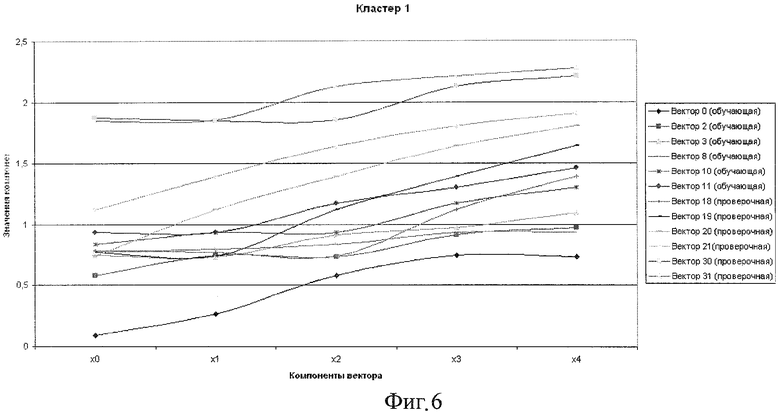
Фиг 6 - Графики входных векторов для обучающей и проверочной выборок, соответствующие одинаковому кластеру.
Заявляемый способ осуществляется следующим образом.
До начала эксплуатации ГТД выбирают параметры, подлежащие диагностическому контролю и регистрируют параметры с помощью датчиков на диагностируемом ГТД в заведомо исправном его состоянии, например в процессе заводских приемо-сдаточных испытаний, формируют их исходные характеристики в виде математических моделей, полученных, например, методом группового учета аргументов (МГУА). Каждый параметр регистрируют последовательно через выбранный интервал времени в пределах назначенного эталонного промежутка N времени.
Для последующего контроля также регистрируют эти параметры на диагностируемом двигателе, но за пределами эталонного промежутка N времени, т.е. во время эксплуатации двигателя.
Для каждого из параметров определяют относительное отклонение от исходного значения:
 ,
,
где ПТЕК - текущее значение диагностического параметра, ПИСХ - исходное значение диагностического параметра, полученное по исходной характеристике.
Производят сглаживание величин относительного отклонения каждого диагностического параметра. Сглаженное значение относительного отклонения диагностического параметра формируют методом экспоненциального сглаживания по рекуррентной формуле:
 ,
,
где  - значение экспоненциальной средней в момент времени t (сглаженное значение x(t)); x(t) - действительное зафиксированное значение относительного отклонения диагностического параметра от исходного значения в момент времени t;
- значение экспоненциальной средней в момент времени t (сглаженное значение x(t)); x(t) - действительное зафиксированное значение относительного отклонения диагностического параметра от исходного значения в момент времени t;  - сглаженное значение x(t) в предыдущий от t момент времени;
- сглаженное значение x(t) в предыдущий от t момент времени;
α≈0,25…0,3 - постоянная сглаживания (весовой коэффициент).
Обработку полученных данных осуществляют с помощью нейронной сети Кохонена, для обучения которой формируют обучающую выборку из данных эталонного промежутка N.
Для этого формируют наборы исходных кортежей.
Эталонный промежуток N времени разбивают на n-m+1 векторов из сглаженных значений относительных отклонений параметров. Здесь n - число сглаженных значений сглаженных отклонений диагностических параметров в исходном промежутке N времени, m - размер кортежа, т.е. число последовательно идущих сглаженных значений отклонений исходного параметра, который измеряют в разные моменты времени (размер малой выборки).
Первый кортеж каждого набора начинают формировать с первого сглаженного значения отклонения параметра, а последующие путем сдвига на одно значение в эталонном промежутке N времени, т.е. реализуют так называемый способ «движущегося окна». Пример представления сглаженных значений отклонений параметров эталонного промежутка N времени в режиме «движущегося окна» приведен в таблице, см. фиг.1.
Таким образом, каждый из n-m+1 векторов содержит m-1 компонентов предыдущего и последующего векторов (кроме первого и последнего векторов).
Затем определяют статистические характеристики для каждого из сформированных кортежей, формируют из них вектор  . Основные из используемых статистических характеристик:
. Основные из используемых статистических характеристик:
- математическое ожидание;
- дисперсия;
- среднеквадратическое отклонение;
- эксцесс;
- скос;
- среднегармоническое значение (для ненулевых величин);
- среднегеометрическое значение (для положительных величин) и др.
Параметры исходных кортежей нормируют относительно их
статистических характеристик и формируют дополнительный кортеж  , элементы которого определяются по формуле:
, элементы которого определяются по формуле:
 ,
,
где  - значение k-й компоненты исходного кортежа из сглаженных значений отклонений контролируемого параметра;
- значение k-й компоненты исходного кортежа из сглаженных значений отклонений контролируемого параметра;
 - среднее значение исходного кортежа;
- среднее значение исходного кортежа;
σх - среднеквадратическое отклонение по исходному кортежу.
Дополнительный нормированный кортеж отличается от исходного кортежа из сглаженных значений отклонений контролируемого параметра тем, что для двух последовательных примеров компоненты нормированного кортежа не будут совпадать, в отличие от компонент исходного кортежа из сглаженных значений отклонений контролируемого параметра.
Вектор входных параметров для нейронной сети формируют из исходного и дополнительного кортежей 
 и
и  , а также статистических характеристик исходного кортежа
, а также статистических характеристик исходного кортежа  .
.
Далее формируют нейронную сеть (НС) Кохонена, которую обучают по обучающей выборке и обрабатывают полученные данные с помощью НС, на вход которой подают входной вектор из обучающей выборки, рассчитывают выходной сигнал нейронной сети и определяют нейрон-победитель и нейрон-проигравший (у нейрона-победителя минимально расстояние от весового вектора до входного сигнала, а выходной сигнал максимален, у нейрона-проигравшего наоборот), для каждого нейрона в нейронной сети рассчитывают уровень активности выхода относительно диапазона выходных сигналов нейрона-победителя и нейрона-проигравшего, нейроны у которых уровень активности выше порогового значения Р считаются принадлежащими к одному кластеру (величина порога Р задается достаточно большой - около 85-90%, таким образом в кластер попадает относительно малое число нейронов), номер которого равен номеру кластера у нейрона-победителя, при этом если для нейрона победителя еще не определен кластер, то формируется новый кластер в НС. После формирования кластерной структуры в НС остается большое количество свободных нейронов, не принадлежащих ни к одному из кластеров, такое поле свободных нейронов позволяет выявлять новые классы во входных данных.
Затем составляют список нейронов, характеризующий классы состояния двигателя. По результатам анализа обучающей выборки идентифицируют классы исходных данных, т.е. выделяют зоны микротрендов, определяют их направленность и сопоставляют с нейронами из списка.
Из параметров для диагностического контроля, зарегистрированных за пределами эталонного промежутка времени N, по мере их регистрации датчиками в процессе эксплуатации двигателя, формируют векторы входных параметров для НС, для чего каждый раз аналогично формируют набор кортежей:
- выполняют определение относительного отклонения текущих зарегистрированных диагностических параметров от своих базовых значений;
- выполняют экспоненциальное сглаживание последовательно регистрируемых величин отклонений диагностического параметра;
- выполняют формирование входного вектора НС из основного и дополнительного кортежей  и
и  , а также статистических характеристик основного кортежа
, а также статистических характеристик основного кортежа  .
.
После чего осуществляют обработку полученных данных с помощью нейронной сети Кохонена и определяют нейрон-победитель с максимальной величиной выходного сигнала. Затем сопоставляют этот нейрон со списком нейронов, характеризующий классы состояния двигателя. При наличии нейрона в этом списке делают вывод об отсутствии изменений в техническом состоянии двигателя. Если нейрон-победитель отсутствует в списке, т.е. не принадлежит ни к одному из кластеров, а находится в зоне свободных нейронов НС, то значит обнаружен новый класс состояний во входном векторе, который характеризует значимое изменение диагностического параметра ГТД.
Оценка выходного сигнала и расстояния от компонент весового вектора до нейрона-победителя позволит определить степень соответствия исходному классу. Если новый класс во входных данных не обнаружен, но при этом имеются значимые отличия в таких характеристиках нейронов-победителей, как расстояние до входного вектора и выходной сигнал при сравнении с аналогичными показателями для параметров нейронов-победителей в этом же кластере из списка нейронов, то должно быть принято решение о дополнительном исследовании входных векторов НС. Значимость отклонений характеристик кластера (степень соответствия исходным классам) подтверждается при сравнении их с пороговым значением. Если класс данных можно характеризовать как микротренд, то такая характеристика нейрона-победителя как расстояние до входного вектора служит степенью развития микротренда.
Применение предлагаемого способа рассмотрено на примере анализа отклонения от исходного значения по времени наработки температуры газа за силовой турбиной газотурбинного двигателя, предназначенного для привода электрического генератора с номинальной мощностью 6 МВт.
Изменение температуры газа за турбиной ГТД определяет не только уровень деградации двигателя, но и режимные параметры, влияющие на величину механических знакопеременных нагрузок, а также факторы, вызывающие газодинамические и температурные неравномерности при работе двигателя.
Исходная зависимость изменения температуры газа за турбиной компрессора двигателя с учетом режимов и условий работы двигателя вида ТСТ=f(nТК ПР,αНА,GT ПР) сформирована по данным приемо-сдаточных испытаний с использованием МГУА в классе полиномиальных моделей не выше второго порядка. С учетом базовой зависимости рассматривается относительное отклонение температуры газа по времени наработки, приведенное на фиг.2. Проведены операции по сглаживанию и статистической оценке параметров временного ряда. Сглаженный тренд отклонения Ттк также приведен на фиг.2.
Данные представлены в двух диапазонах - первый от 3887 до 4454 часов наработки, а второй от 6041 до 7057 часов наработки. Для обучения нейронной сети выбран первый этап наработки, второй этап выбран для проверки работы способа диагностического контроля параметров ГТД.
Размер выборки для постановки диагноза был выбран m=5.
Результаты начальных математических преобразований представлены в таблицах 1 и 2 для обучающей и проверочной выборок соответственно.
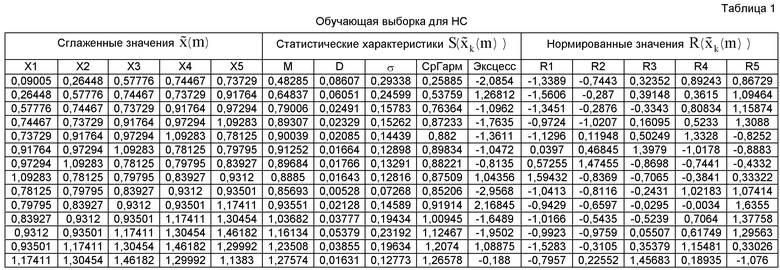
Для контроля изменения параметров была сформирована нейронная сеть Кохонена, представленная топографической картой размером 60×60 нейронов. Сеть была обучена по обучающей выборке в течение 30000 эпох обучения. Под эпохой обучения понимается полный «проход» по всем примерам обучающей выборки. Обученная и кластеризованная карта представлена на фиг.3.
По результатам кластеризации в обучающей выборке выявлено 7 классов данных, они приняты как исходные классы с незначительным трендом.
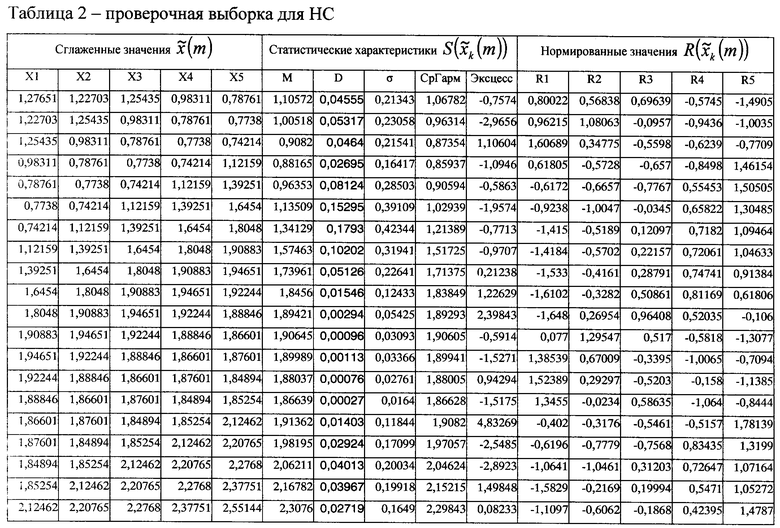
Выявление тренда базировалось на определении нового кластера в нейронной сети. В таблицах 3 и 4 приведены результаты проверки соответствия примеров из обучающей и проверочной выборок классам во входных данных. Класс «0» означает, что НС выявила новую информацию во входных данных.
Обозначения в таблице 3:
№ вектора - номер вектора из обучающей выборки
№ кластера - номер кластера в НС
Dist - дистанция до входного вектора у нейрона-победителя
Y - выходной сигнал нейрона-победителя
Топографические карты выходных сигналов НС для каждого из 7 классов представлены на Фиг 4.
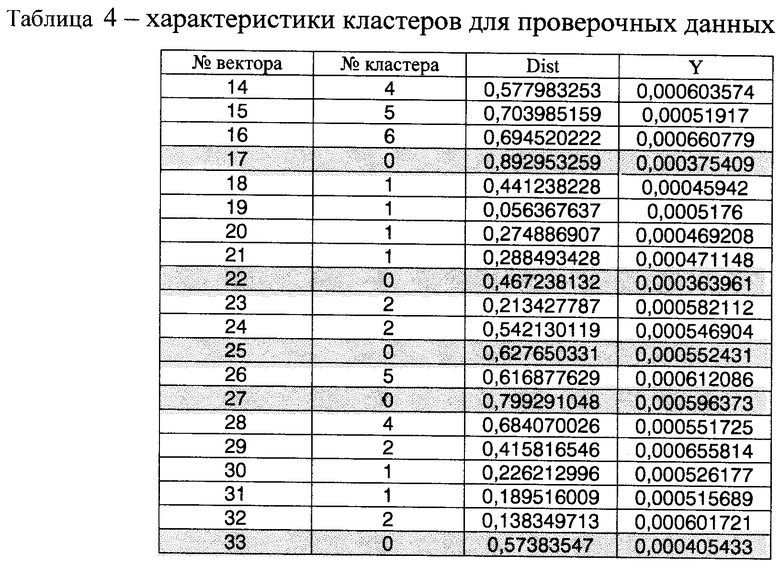
Как видно из таблиц 3 и 4, для проверочных данных зафиксировано 5 случаев выявления новых кластеров во входном векторе. Для топографической карты выходов характерно резкое изменение окраски (дополнительный визуальный диагностический признак), результаты показаны на Фиг 5.
Кроме того, имеется существенное различие в компоненте расстояния до входного вектора - Dist. Данный параметр может характеризовать степень развития тренда, при условии, что он выделен в исходной обучающей выборке. Как пример можно привести входные вектора, относящиеся к самому большому кластеру №1 (Фиг 6). Данный класс можно обозначить как «Возрастающий микротренд». Удаленность текущего входного вектора от соответствующего весового вектора нейрона победителя свидетельствует о степени развития данного тренда, например, для проверочных данных наиболее удаленным является вектор №18. Несмотря на относительно небольшие уровни отклонения температуры газа за турбиной, данный вектор характеризует выход из нисходящего тренда и начало резкого возрастания, т.е. начало значимого изменения параметра, что может свидетельствовать о появлении какого-либо дефекта и должно быть предметом для дополнительного исследования.
Предлагаемый способ определения технического состояния двигателя позволяет за счет использования сглаженных зависимостей изменения диагностического параметра (с учетом условий и режимов работы ГТД), дополненных статистической предобработкой, выделить и расширить вектор диагностических признаков, что дает возможность дифференцировать изменения параметров, связанные с деградацией техники и изменения параметров, обусловленных условиями и режимами работы двигателя.
Такой способ дает возможность автоматически выявлять значимые изменения в параметрах ГТД, контролировать техническое состояние по малой реализации временного ряда диагностического параметра, а также выделять изменения диагностических параметров, связанных с деградацией техники, и изменения, обусловленные режимами и условиями работы двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
| СПОСОБ НЕЙРОСЕТЕВОГО АНАЛИЗА СОСТОЯНИЯ СЕРДЦА | 2011 |
|
RU2461877C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ БЕЗ УЧИТЕЛЯ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ОБУЧЕНИЯ МОДЕЛЕЙ | 2023 |
|
RU2818858C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| Способ вибродиагностирования газотурбинного двигателя | 2015 |
|
RU2688340C2 |

Изобретение относится к способам диагностики технического состояния газотурбинного двигателя (ГТД) с применением нейронных сетей. Техническим результатом является расширение технологических возможностей способа путем выявления неисправностей на ранних стадиях и отслеживания технического состояния двигателя в динамике. Заявляемый технический результат достигается тем, что исходные характеристики контролируемых параметров определяют на диагностируемом двигателе в заведомо исправном его состоянии, например в процессе приемо-сдаточных испытаний в виде математических зависимостей, назначают эталонный промежуток N времени, производят последовательную регистрацию каждого параметра с выбранным интервалом в пределах эталонного промежутка N времени. Регистрацию параметров для последующего диагностического контроля производят за пределами этого промежутка времени и, после определения отклонений каждого из этих параметров от исходной характеристики, производят сглаживание величин отклонений. Обучающую выборку для нейронной сети Кохонена формируют из данных эталонного промежутка N времени, для чего формируют наборы исходных кортежей по m последовательных сглаженных значений отклонений параметра в каждом, при этом первый кортеж каждого набора начинают формировать с первого сглаженного значения отклонения, а последующие путем сдвига на одно значение, определяют статистические характеристики для каждого из сформированных кортежей, нормируют параметры исходного кортежа относительно статистических характеристик для каждого набора исходных кортежей и формируют дополнительные кортежи. Вектор входных параметров для нейронной сети формируют из исходного и дополнительного кортежей, а также статистических характеристик исходного кортежа и после обработки полученных данных, в процессе которой выполняется обучение и кластеризация нейронной сети Кохонена, составляют список нейронов, характеризующий классы состояния двигателя. Из отклонений значений параметров для диагностического контроля от исходных характеристик аналогично формируют набор кортежей, после кластерного анализа которого и выбора нейрона с максимальным значением выходного сигнала сопоставляют этот нейрон со списком нейронов, характеризующим классы состояния двигателя. Вывод об отсутствии изменений в техническом состоянии двигателя делают при наличии выбранного нейрона в составленном списке. 6 ил.
Способ диагностики технического состояния газотурбинного двигателя, при котором выбирают параметры, подлежащие диагностическому контролю, определяют исходные характеристики этих параметров, а также регистрируют параметры на диагностируемом газотурбинном двигателе с помощью датчиков, определяют отклонения значений зарегистрированных параметров от исходных значений, формируют векторы входных параметров, обрабатывают полученные данные с помощью нейронной сети Кохонена, которую предварительно обучают и производят формирование структуры классов по обучающей выборке, формируют выходные сигналы сети, выбирают нейрон с максимальным значением сигнала, определяют класс, к которому он относится, и делают вывод об изменении в техническом состоянии двигателя, отличающийся тем, что исходные характеристики контролируемых параметров определяют на диагностируемом двигателе в заведомо исправном его состоянии, например в процессе приемосдаточных испытаний в виде математических зависимостей, назначают эталонный промежуток N времени, производят последовательную регистрацию каждого параметра с выбранным интервалом в пределах эталонного промежутка N времени, а регистрацию параметров для последующего диагностического контроля производят за пределами этого промежутка времени, после определения отклонений каждого из этих параметров от исходной характеристики производят сглаживание значений отклонений, при этом обучающую выборку для нейронной сети Кохонена формируют из данных эталонного промежутка N, для чего формируют наборы исходных кортежей по m последовательных сглаженных значений отклонений параметра в каждом, при этом первый кортеж каждого набора начинают формировать с первого сглаженного значения отклонения, а последующие - путем сдвига на одно значение, определяют статистические характеристики для каждого из сформированных кортежей, нормируют параметры исходного кортежа относительно статистических характеристик для каждого набора исходных кортежей и формируют дополнительные кортежи, вектор входных параметров для нейронной сети формируют из исходного и дополнительного кортежей, а также статистических характеристик исходного кортежа, после обработки полученных данных в процессе которой выполняется обучение и кластеризация нейронной сети Кохонена, составляют список нейронов, характеризующий классы состояния двигателя, при этом из сглаженных значений отклонений параметров для диагностического контроля аналогично формируют набор кортежей, после кластерного анализа которого и выбора нейрона с максимальным значением выходного сигнала сопоставляют этот нейрон со списком нейронов, характеризующим классы состояния двигателя, вывод об отсутствии изменений в техническом состоянии двигателя делают при наличии выбранного нейрона в составленном списке.
| ЖЕРНАКОВ С.В | |||
| Применение технологии нейронных сетей для диагностики технического состояния авиационных двигателей, Научно-практический журнал ИЖГТУ «Интеллектуальные системы в производстве, 2006, №2, с.70-80 | |||
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВИАЦИОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2389999C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДЕТАЛЕЙ, УЗЛОВ И ПРИВОДНЫХ АГРЕГАТОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2379645C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369854C2 |
| СПОСОБ ДИАГНОСТИКИ И ПРОГНОЗИРОВАНИЯ НАДЕЖНОСТИ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ НА УСТАНОВИВШИХСЯ И НЕУСТАНОВИВШИХСЯ РЕЖИМАХ РАБОТЫ | 2006 |
|
RU2310180C1 |
| ЕР 1619489 В1, 19.03.2008 | |||
| US 7020595 B1, 28.03.2006. | |||

