Изобретение относится к устройству для удаления замороженного продукта (предпочтительно крови или получаемого из крови продукта) из гибкой пластиковой емкости.
Использование гибкой пластиковой емкости для хранения крови и ее компонентов хорошо известно в области медицины. Разделение крови на различные компоненты, в том числе: плазму, красные кровяные тельца и тромбоциты, также известно.
Эти компоненты традиционно хранят в пластиковых мешках, которые впоследствии замораживают для сохранения свойств этих компонентов.
Согласно сведениям изобретателей все способы, упомянутые выше, нацеленные на полную автоматизацию процесса опорожнения или разгрузки мешков, на практике не были успешны из-за сбоев вследствие непостоянства размера мешков, конечной формы замороженного мешка и требований к чистке и надежности. Поэтому в промышленной практике процессы опорожнения являются полностью ручными или наполовину ручными и касаются обработки биологически опасных продуктов.
Поскольку это жидкий продукт, который застывает при заморозке, точная форма мешка, как только продукт, хранимый в нем, застывает, является непредсказуемой. Поэтому сложность транспортировки и опорожнения этих пластиковых емкостей состоит в том, что помимо того, что их форма не известна, они обычно становятся скользкими из-за влаги, которая замерзает на поверхности мешка.
Более того, продукты, сохраняемые в конкретном варианте осуществления изобретения, имеют, как правило, биологическую природу, и должна поддерживаться их стерильность и безопасность персонала, который имеет с ними дело.
В документе US 5829634 описывается устройство и способ разгрузки замороженного продукта крови (плазмы). В этом документе описывается устройство, которое включает в себя конвейерную ленту, которая перемещает замороженную плазму к участку резки. После выполнения поперечного разреза в мешке мешок перемещается к зубчатому валику, который захватывает мешок за конец, противоположный концу с разрезом, и, прикладывая давление в продольном направлении от захватывающего конца к противоположному концу, замороженный продукт выдавливается. После того, как замороженный продукт был помещен на ленту, используется средство для сбора плазмы, а мешки помещаются в емкость для пустых мешков.
В документе WO 93/24371 описывается способ разгрузки емкости с замороженной кровью без необходимости в частичном размораживании упомянутой крови. Это метод возник вследствие необходимости разрушения связи между замороженной плазмой и мешком, по-видимому, вследствие влаги, которая может образовываться внутри мешка, когда осуществляется стерилизация в автоклаве.
Способ состоит в выполнении спирального разреза по всему мешку. Впоследствии мешок пропускается между двух валиков для вытеснения замороженной плазмы из этого мешка. Из этого документа также становится известно, что все, что оказывает давление на мешок, сначала на один конец, а затем вдоль всего мешка, может быть использовано для извлечения замороженного содержимого.
В документе ES 8603338 описывается устройство для открывания мешков, которые имеют торчащий лоскут и непрочную продольную линию, т.е. продольная линия от края до края мешка является непрочной, или мешок выполнен таким образом, что его можно разорвать по этой линии. Устройство опорожнения для этих мешков включает в себя станцию транспортировки мешков, которая продвигает мешок к станциям для удаления оболочки, где зажимы захватывают торчащий лоскут. Эти зажимы оказывают усилие на мешок, вынуждая его разрываться вдоль линии с меньшей прочностью, вытесняя тем самым содержимое.
Таким образом, ни одно из применений методики не обеспечивает адекватного механизма обработки плазмы после того, как ее содержимое было извлечено. Важно обратить внимание на то, что температура замороженных продуктов увеличивается, пока они движутся на традиционной конвейерной ленте, и к тому же давление, которое оказывают как режущие инструменты, так и зажим, способствует оттаиванию продукта, так что в устройствах по этой методики после того, как мешок с замороженным продуктом был разрезан, остатки биологического вещества остаются на конвейерной ленте. Ситуация ухудшается при использовании устройств, известных в данной области техники, если после удаления замороженного продукта, его вновь помещают на конвейерную ленту, оставляя биологические остатки оттаивать на ленте без какой-либо защиты, увеличивая таким образом грязь на устройстве извлечения и требуя большего и более дорогостоящего обслуживания.
Также в таких применениях крайне желательно поддерживать чистоту каждого из элементов, которые включают в себя устройство опорожнения, поскольку, как объяснено выше, содержимое этих мешков является потенциально опасным биологическим веществом, с которым также следует обращаться в максимально возможных асептических условиях.
Таким образом, изобретение обеспечивает устройство, которое позволяет за счет собственных средств надлежащим образом и надежно обеспечивать опорожнение емкостей с замороженными продуктами, поддерживая в то же время чистоту и стерильность продукта и обеспечивая более низкие потери продукта, чем в устройствах, известных в данном области техники, и увеличенную производительность.
Следовательно, задача изобретения состоит в том, чтобы обеспечить устройство для опорожнения мешка, содержащего получаемый из крови продукт, содержащее:
- устройство для резки;
- экстрактор продукта;
- воронку для приема продукта;
- устройство для транспортировки мешка от зоны приемки до экстрактора плазмы, при этом транспортировочное устройство включает в себя роботизированную руку с захватом, который, в свою очередь, содержит:
- две захватывающие руки, где каждая определяет, по меньшей мере, один дистальный конец и один проксимальный конец, и
- привод,
где привод управляет механизмом для изменения расстояния, отделяющего дистальные концы упомянутых рук захвата, для захвата мешка за его нижнюю поверхность.
В конкретном варианте осуществления захватывающими руками являются две имеющие, по существу, полуэллипсоидальное поперечное сечение руки, прикрепленные к транспортировочному устройству посредством шарнирного соединения, при этом привод снабжен средством вращения упомянутого шарнирного соединения.
Транспортировочным устройством является предпочтительно роботизированная рука.
Более предпочтительно, когда роботизированная рука включает в себя ограничитель, который размещен в одном из продольных концов мешка и между упомянутыми фиксирующими руками. Этот ограничитель содержит предпочтительно датчик приближения. Помимо этого датчик приближения может являться концом дорожки.
Особенно предпочтительно, чтобы устройство для резки содержало режущую кромку, размещенную на траектории мешка между точкой приемки и экстрактором.
В более предпочтительном варианте кромка располагается над принимающей воронкой для продукта, извлекаемого при помощи экстрактора.
Более предпочтительно, когда устройством для резки является устройство для поперечного разрезания мешка. В возможной модели устройством для резки является зубчатое устройство для резки, которое производит на мешке прерывистый разрез, не давая содержимому самому покидать мешок и позволяя извлекающему устройству разрывать эти оставшиеся целыми места мешка при помощи давления.
В одной модели устройство включает в себя неподвижную наклонную платформу с боковыми стенками, которые составляют дорожку для центрирования и доставки мешка к роботизированной руке. В предпочтительной модели устройство включает в себя конвейерную ленту для транспортировки мешков к конвейерному устройству (например, к платформе).
Еще предпочтительней, когда лента является наклонной. Это будет способствовать очистке устройства, так что плазма, которая оттаяла в течение пути мешка, стекает вследствие силы тяжести. Поэтому для очистки оттаявшей плазмы во время ее пути достаточно иметь в наличии воду в верхней части ленты.
Еще предпочтительней, когда экстрактор плазмы включает в себя два валика. В конкретной модели валики находятся в контакте и вращаются в противоположных направлениях, усиливая тем самым захват мешка вследствие пропускания его через них и оказывая давление в продольном направлении всего мешка.
Предпочтительно, когда по меньшей мере один валик выполнен из непроскальзывающего материала.
Для лучшего понимания и для пояснительного, но не ограничивающего, примера варианта осуществления способа и устройства опорожнения мешка с продуктом крови согласно изобретению приложены чертежи.
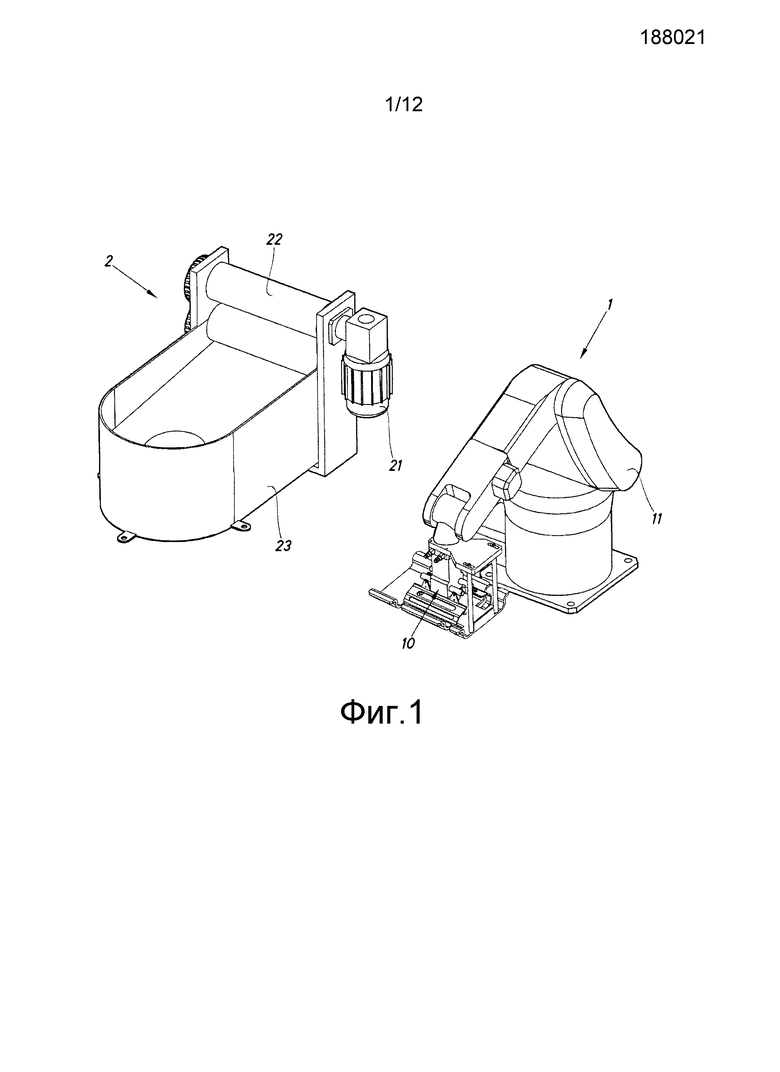
На фиг.1 показан вид в перспективе варианта осуществления изобретения.
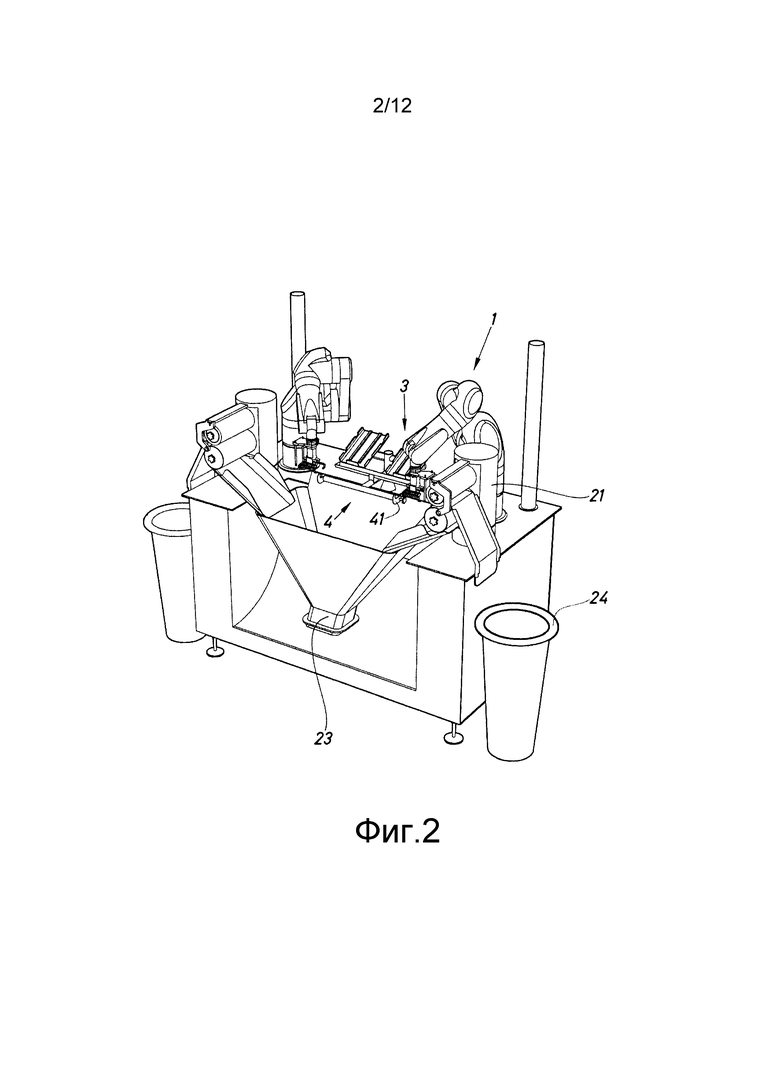
На фиг.2 - другой вид в перспективе варианта осуществления изобретения.
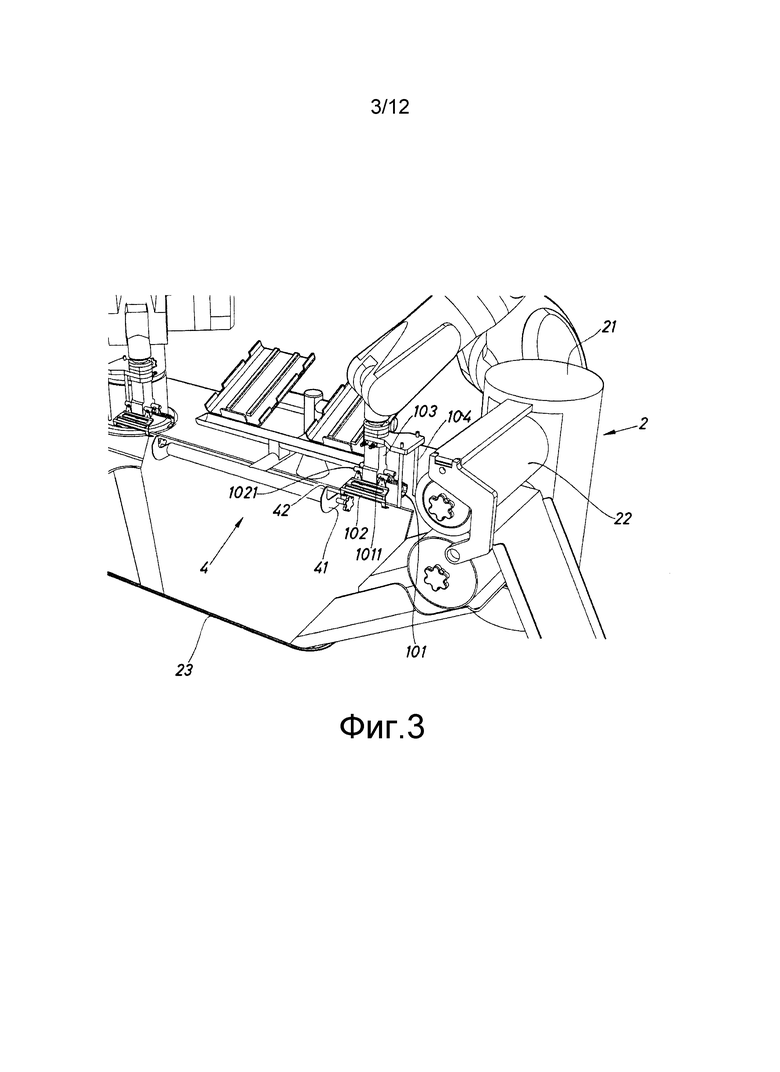
На фиг.3 - подробный вид в перспективе примера.
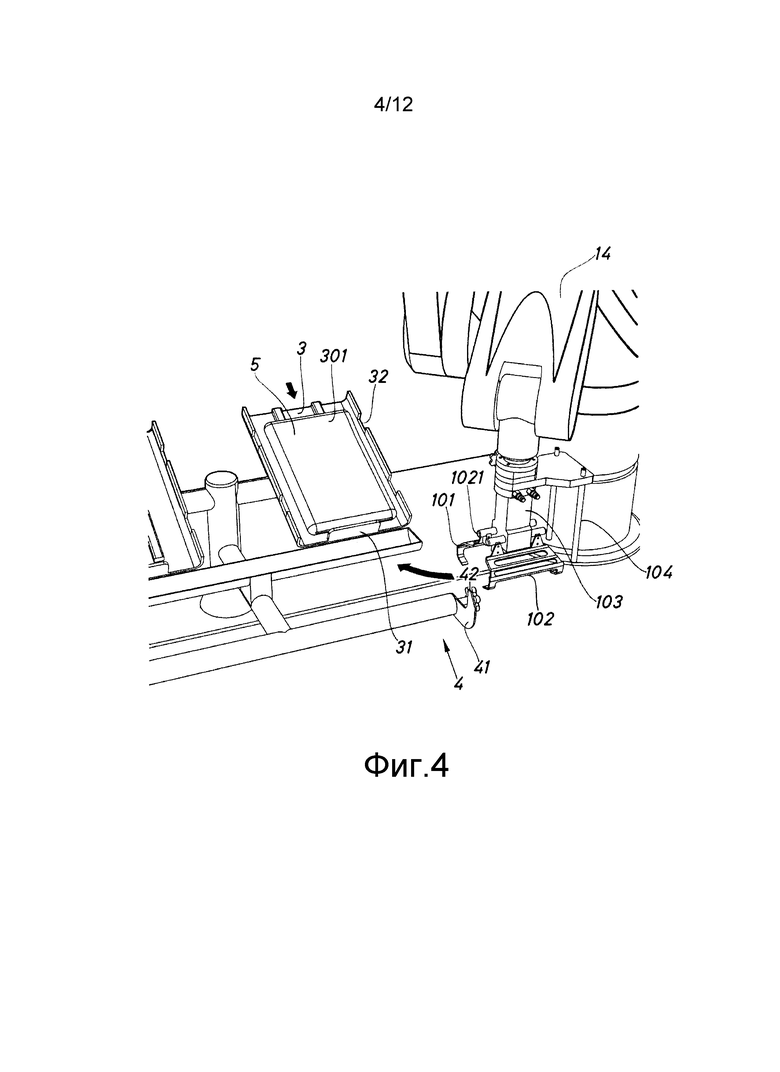
На фиг.4-7 - соответствующие подробные виды в перспективе, иллюстрирующие процесс подбора мешка, его разрезания и извлечения его содержимого.
На фиг.7 показан второй вариант осуществления устройства согласно изобретению.
На фиг.8 показан вид в перспективе захватывающего устройства согласно изобретению.
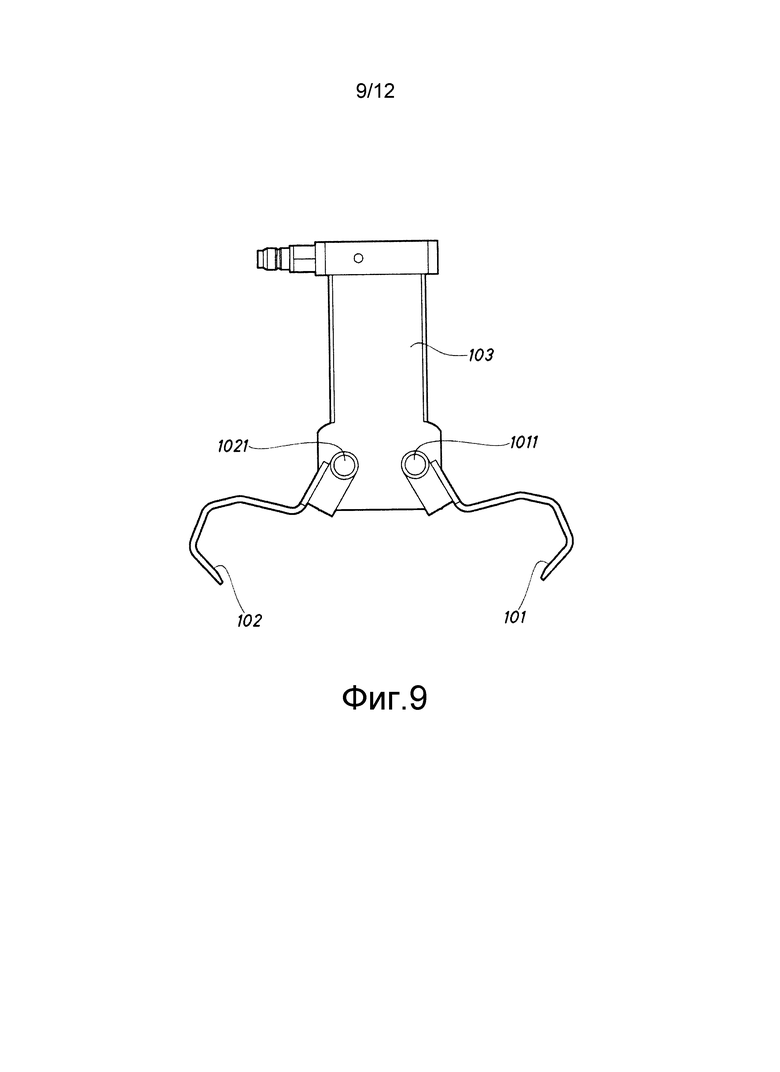
На фиг.9 показан вид сбоку захватывающего устройства по фиг.8 в не рабочем состоянии.
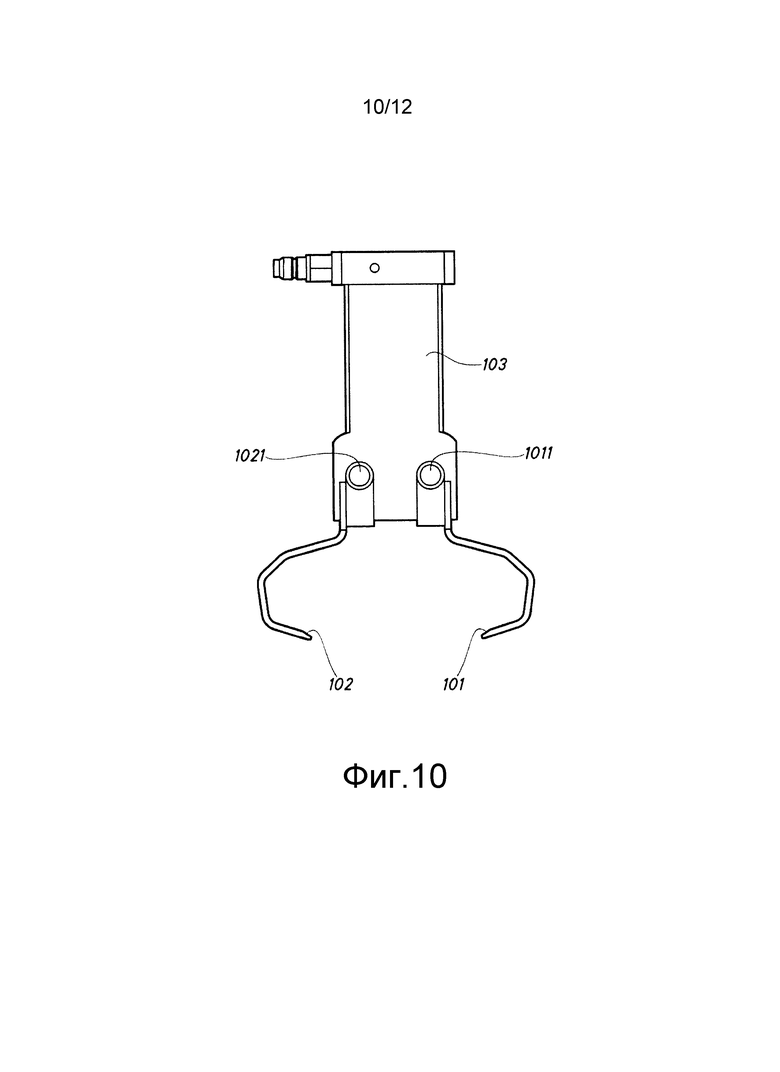
На фиг.10 показан вид сбоку захватывающего устройства по фиг.8 в рабочем состоянии.
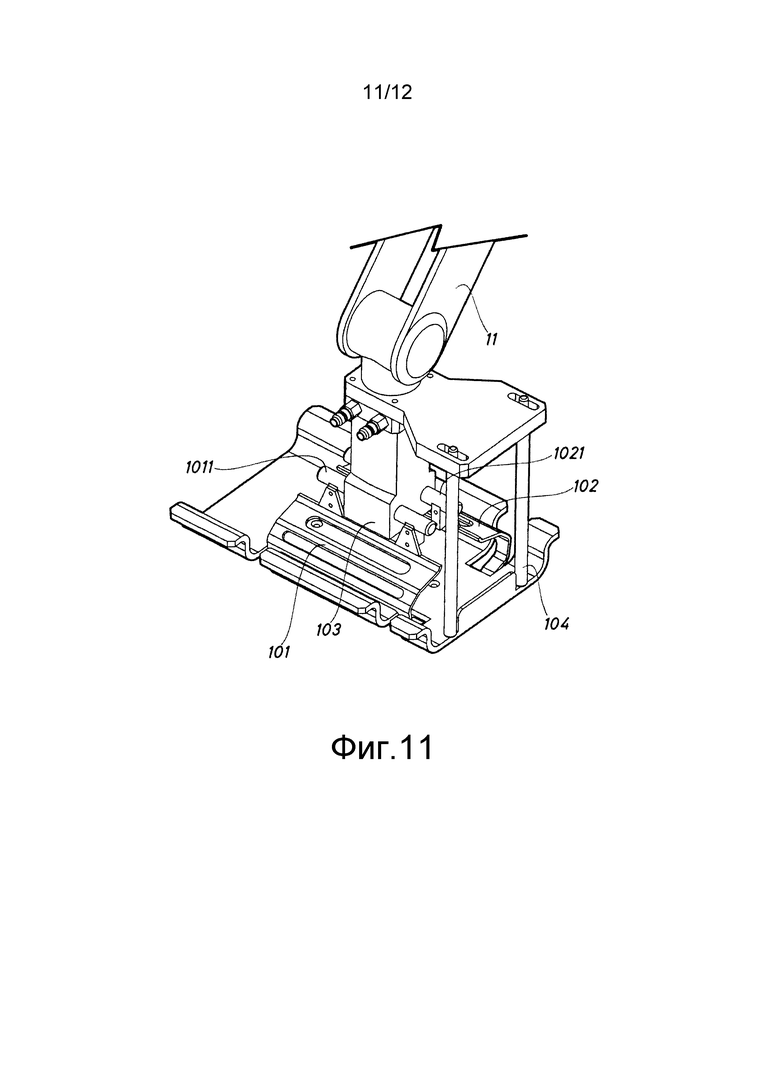
На фиг.11 показано захватывающее устройство по фиг.8, 9 и 10 и их крепление к роботизированной руке.
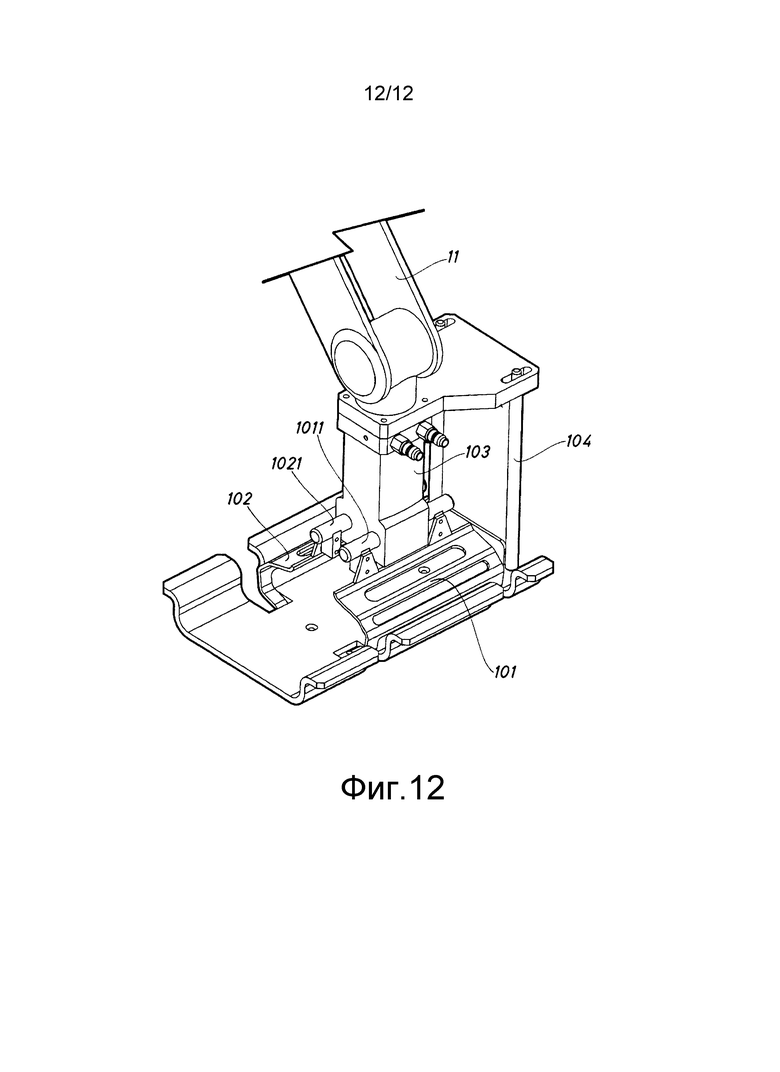
На фиг.12 показан вид сбоку устройства по фиг.11.
На фиг.1-7 видно роботизированную руку 1, которая включает в себя корпус 11 руки и захватывающее устройство 10. Также показаны устройство 2 удаления, содержащее двигатель 21 и экстрактор, которым в этом конкретном случае являются два валика 22, размещенные таким образом, что они вступают в контакт, чтобы оказывать давление на емкость (в этом конкретном случае мешок), когда мешок прогоняют через них. Также показана воронка 23 для отведения продукта, извлеченного из упомянутого мешка.
Вариант осуществления, показанный на фиг.1, преследует цель переместить мешки, расположенные в области 3 приемки, поступающие из транспортной системы, например конвейера (не показан), к устройству 2 извлечения, что сводит к минимуму грязь, производимую оттаявшей плазмой во время процесса транспортировки. В результате уместно перемещать емкость с конвейерной ленты к удаленному устройству, такому как воронка 23.
Устройство извлечения в этом конкретном случае содержит два валика 22 и двигатель 21. Эти валики вращаются в противоположных направлениях, так что емкость (или мешок), размещенная в месте соединения обоих валиков, прогоняется по направлению к валикам и, в свою очередь, от содержимого мешка по направлению от валиков, т.е. к воронке 23, оказывается усилие. Пластиковый мешок 5 втягивается в противоположном направлении и доставляется к емкости 24. В особенно предпочтительной модели один из валиков выполнен из металлического материала, а другой валик сделан из непроскальзывающего материала.
Захватывающее устройство 1 в этом примере включает в себя две полуэллиптические руки 101, 102, хотя в особенно предпочтительной модели ими могут быть две Г-образные руки. Рука 101 прикреплена к выступающей части 103 роботизированной руки (не показана) посредством поворотного сочленения, т.е. шарнирного соединения 1011. Вращение этого шарнирного соединения 1011 определяет, является ли состояние захватывающего устройства рабочим или не рабочим состоянием. Аналогично шарнирное соединение 1021 определяет состояние руки 102.
Для того, чтобы объяснить изобретение просто, термин «рабочее состояние» будет применяться к состоянию, в котором рука схватывает емкость, а термин «нерабочее состояние» - к состоянию, в котором рука не схватывает емкость. Для достижения нерабочего состояния привод (не показан) поворачивает шарнирные соединения 1021, 1011 в противоположных направлениях, вынуждая руки 101, 102 поворачиваться в противоположных направлениях таким образом, что захватывающее устройство раскрывается, позволяя руке приблизиться к емкости.
Следует подчеркнуть, что эта модель захватывающего устройства позволяет схватывать емкость за ее основание; эта деталь имеет существенное значение, поскольку емкости в предпочтительной модели содержат замороженное вещество, что делает емкость слишком скользкой, чтобы держать за ее боковые концы. Кроме этого, использование рук 101, 102 по изобретению обеспечивает дополнительную фиксацию емкости, позволяя ей покоиться на ее основании в полуэллипсоидальных руках.
Захватывающее устройство, соединенное с корпусом роботизированной руки 11, включает в себя ограничитель 104. Наличие ограничителя 104 позволяет устройству обнаруживать приближенность поверхности, на которой находятся емкости, путем включения в состав на его дистальном конце датчика приближения. Неожиданно, но наличие ограничителя 104 препятствует продольному перемещению мешка на руках, не давая тем самым биологически опасному веществу упасть.
Кроме этого, в одной конкретной модели этот ограничитель 104 используется также в качестве толкающего устройства после того, как мешок помещен между валиков. Расположение этого ограничителя может меняться в зависимости от особенностей каждого применения. В особенно предпочтительной модели упомянутый ограничитель размещен в захватывающем устройстве, а не в корпусе руки.
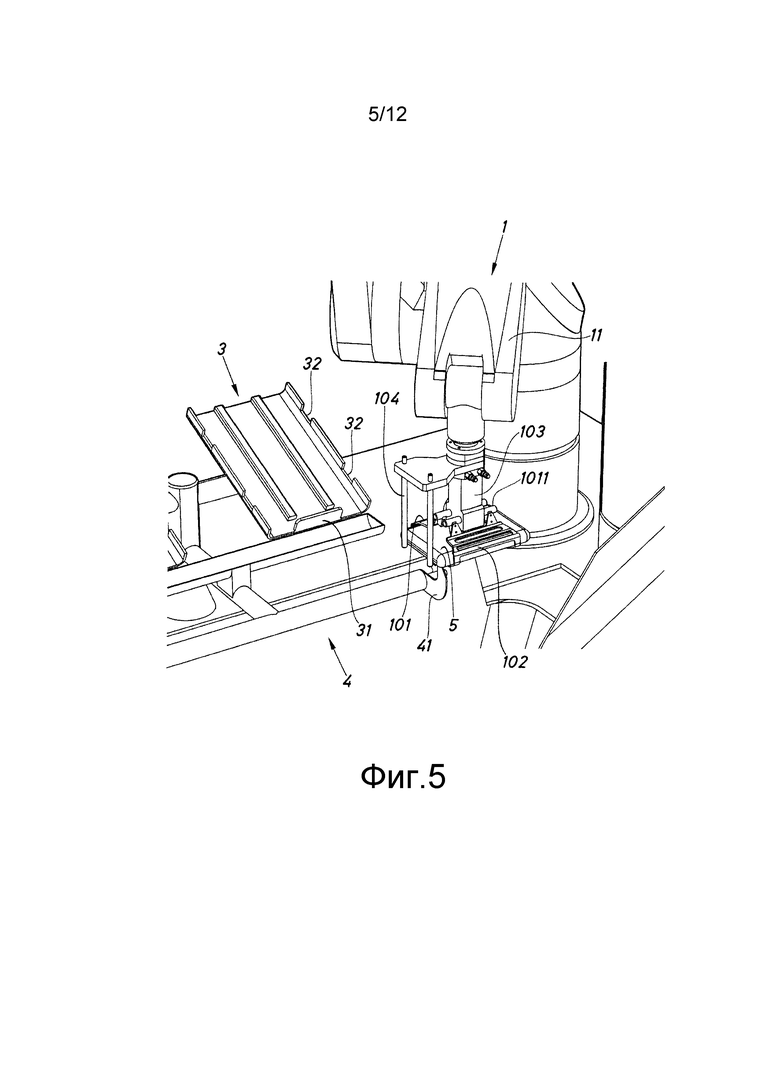
В показанном варианте осуществления можно также увидеть область 3 приемки, откуда роботизированная рука 1 подбирает мешок 5. В показанном примере областью приемки является неподвижная платформа или наклонный лоток с ограничителем 31 и боковыми стенками с отверстиями 32, которые обеспечивают прохождение пальцев рук 101, 102 захватной части этой руки. Лоток является, таким образом, центрирующей дорожкой и доставляет мешки к роботизированной руке 1.
Кроме этого, в показанном варианте осуществления устройство содержит устройство 4 для резки, которое включает в себя неподвижное лезвие 41 с верхней кромкой 42.
Лезвие 41 расположено над воронкой 23 для сбора продукта таким образом, что любая капля, которая может вытечь из мешка 5 во время процесса резки, упадет в воронку 23 вместе с замороженным веществом, извлекаемым из мешка 5 валиками 22.
Устройство 4 для резки находится посередине между областью 3 приемки и экстрактором 2. Конкретно, нож 41, который является неподвижным, находится на траектории, которую проходит мешок 5, только под ней.
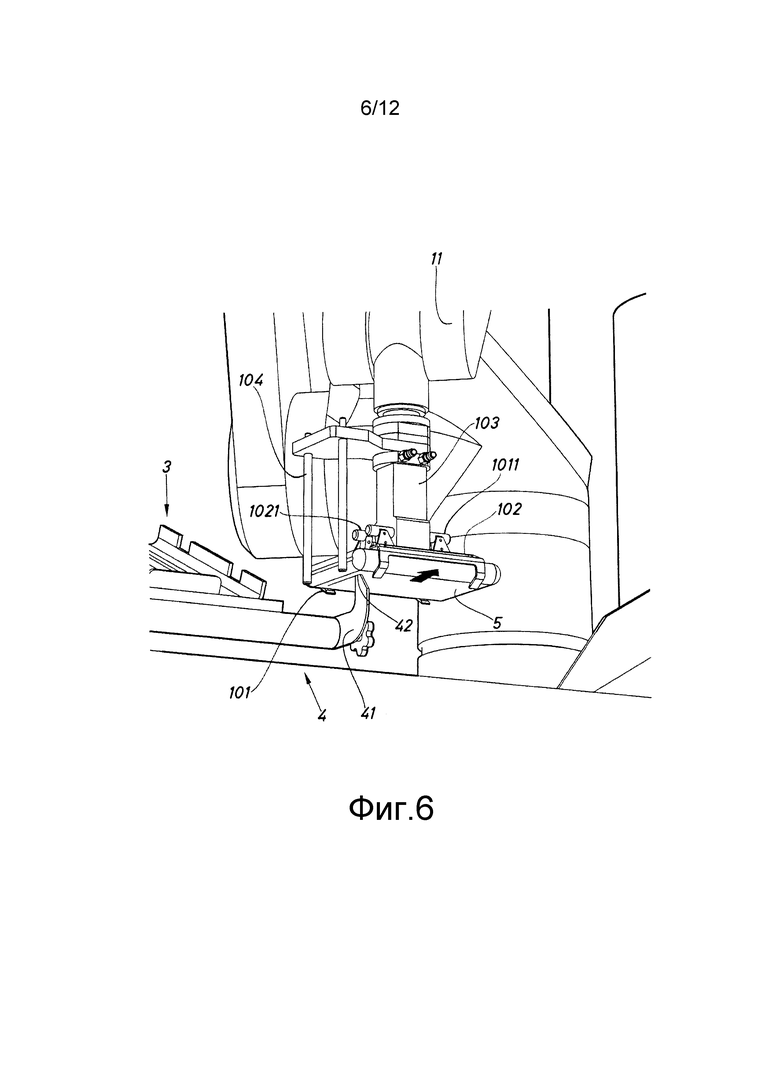
На фиг.4-7 показан процесс сбора, резки и извлечения из мешка 5. Роботизированная рука подбирает мешок 5, а верхняя кромка 42 лезвия 41 разрывает мешок. Для этого применения даже не обязательно, чтобы кромка 42 была очень острой, поскольку для выполнения задачи не обязательно выполнять фактическое разрезание мешка. Частичного разрыва достаточно для создания предпочитаемой области раскрытия, когда валики 21 оказывают давление на мешок.
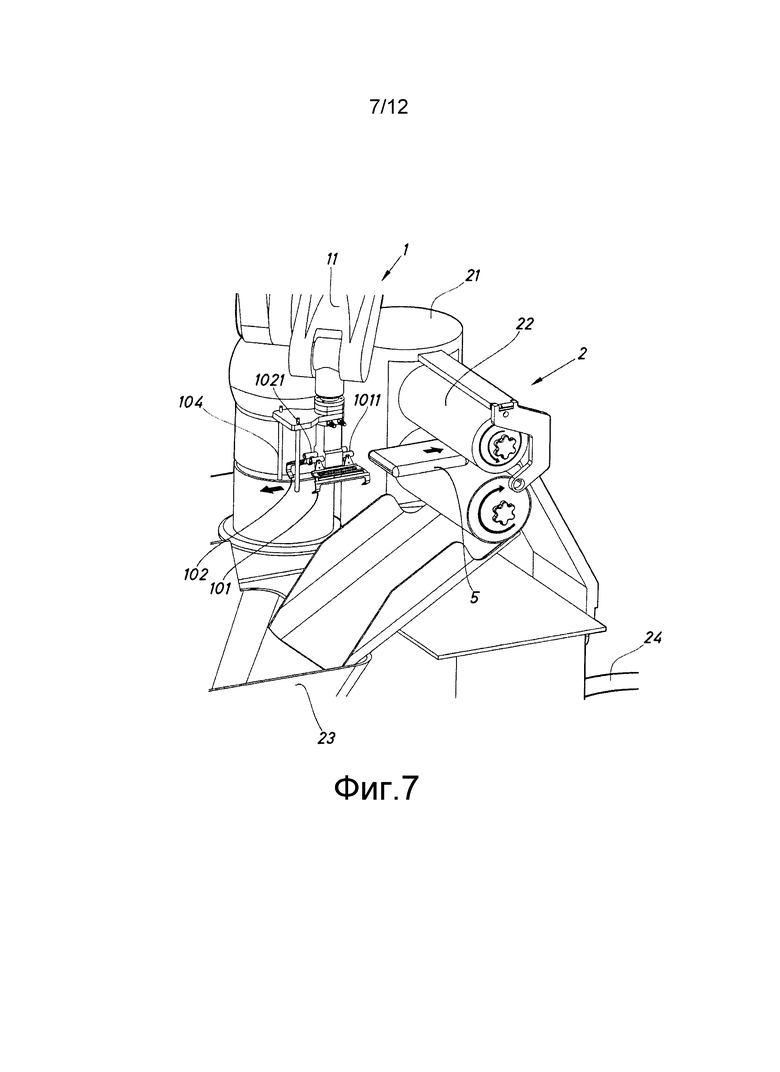
Вариант осуществления по фиг.7-12 включает в себя конвейер, на котором размещают полностью запечатанную замороженную плазму. Конвейерная лента переносит мешки к устройству для резки. Впоследствии устройство для резки выполняет разрез, либо непрерывный (традиционное лезвие), либо прерывистый (зазубренное лезвие), на одном из концов мешка. Затем мешок переносится посредством механической роботизированной руки 1 к устройству извлечения, которое извлекает замороженный продукт из мешка, и замороженный продукт собирается в воронке 23, сконструированной для этой цели.
Чтобы облегчать чистку устройства, конвейер может быть расположен под углом. Таким образом, когда требуется чистка, достаточно воды (или подходящей жидкости для чистки), которая бы стекала, удаляя загрязняющие вещества, которые могут создаваться вследствие естественного оттаивания мешков во время процедуры.
Устройством для резки может быть устройство для непрерывного или прерывистого разрезания, в одной предпочтительной модели выполняется прерывистый разрез, так что, когда мешок находится в экстракторе, он оказывает на мешок достаточное усилие, чтобы завершить его разрыв и вытеснить содержимое.
На фиг.7 видно роботизированную руку 1, которая включает в себя корпус 11 руки и захватывающее устройство 10. Также показано извлекающее устройство 2, которое включает в себя двигатель 21 и экстрактор, которым в этом конкретном случае являются два валика 22, размещенные таким образом, что они вступают в контакт, чтобы оказывать давление на емкость (в этом конкретном случае, мешок), когда мешок помещен между ними. Кроме этого, показана воронка 23 для отведения продукта, извлеченного из этого мешка.
Вариант осуществления, показанный на фиг.7, может быть предназначен для перемещения мешков, поступающих из транспортной системы, например конвейера (не показан), к извлекающему устройству 2, что сводит к минимуму грязь, производимую оттаявшей плазмой во время процесса транспортировки. Поэтому уместно перемещать емкость с конвейерной ленты к удаленному устройству, такому как воронка 23.
Устройство извлечения в этом конкретном случае содержит два валика 22 и двигатель 21. Эти валики вращаются в противоположных направлениях, так что емкость (или мешок), размещенная в месте соединения двух валиков, загоняется в валики, и, в свою очередь, изнутри мешка в направлении наружу от валиков, т.е. к воронке 23, оказывается усилие. В особенно предпочтительной модели один из валиков выполнен из металлического материала, а другой валик сделан из непроскальзывающего материала.
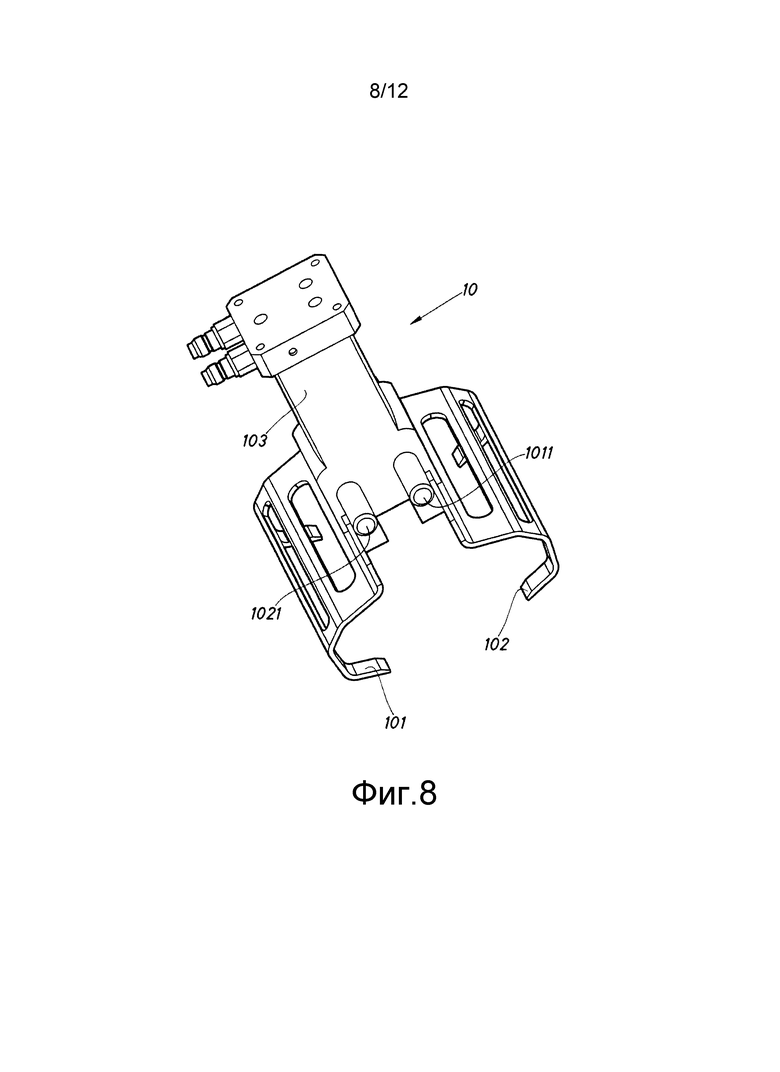
На фиг.8 показано захватывающее устройство 10 согласно изобретению. Вариант осуществления по фиг.2 включает в себя две полуэллипсоидальные руки 101, 102, хотя в особенно предпочтительной модели ими могут быть две Г-образные руки. Рука 101 прикреплена к выступающей части 103 роботизированной руки (не показана) посредством поворотного сочленения, т.е. шарнирного соединения 1011. Вращение этого шарнирного соединения 1011 определяет, находится ли захватывающее устройство в рабочем или нерабочем состоянии. Аналогично шарнирное соединение 1021 определяет состояние руки 102.
Для того, чтобы объяснить изобретение просто, термин «рабочее состояние» будет применяться, где рука схватывает емкость, а термин «нерабочее состояние» - где рука не схватывает емкость.
На фиг.9 показан вариант осуществления захватывающего устройства по фиг.2 в нерабочем состоянии. Для достижения этого нерабочего состояния привод (не показан) поворачивает шарнирные соединения 1021, 1011 в противоположных направлениях, вынуждая руки 101, 102 поворачиваться в противоположных направлениях таким образом, что захватывающее устройство раскрывается, позволяя руке приблизиться к емкости.
На фиг.10 показан вариант осуществления захватывающего устройства по фиг.2 в рабочем состоянии. Следует заметить, что эта модель захватывающего устройства позволяет схватывать емкость за ее основание; эта деталь имеет существенное значение, поскольку емкости в предпочтительной модели содержат замороженное вещество, что делает емкость слишком скользкой, чтобы держать за ее боковые концы.
Кроме этого, использование рук 101, 102 изобретения обеспечивает дополнительную фиксацию емкости, позволяя ей покоиться на ее основании в полуэллипсоидальных руках.
На фиг.11 и 12 показано захватывающее устройство, соединенное с корпусом роботизированной руки 11, с этой точки видна установка ограничителя 104.
Наличие ограничителя 104 позволяет устройству обнаруживать приближенность поверхности, на которой находятся емкости, путем включения в состав на его дистальном конце датчика приближения.
Неожиданно, но наличие ограничителя 104 останавливает продольное перемещение мешка на руках, не давая тем самым биологически опасному веществу упасть.
Кроме этого, в одной конкретной модели этот ограничитель 104 используется также в качестве толкающего устройства, пока мешок помещен между валиков. Расположение этого ограничителя может меняться в зависимости от особенностей каждого применения. В особенно предпочтительном варианте осуществления этот ограничитель размещен в захватывающем устройстве, а не в корпусе руки.
Изобретение касается устройства для опорожнения мешка, содержащее замороженный получаемый из крови продукт. Изобретение включает в себя устройство для резки, экстрактор для продукта, воронку для приема продукта, устройство для транспортировки мешка от области приемки к экстрактору плазмы. Транспортировочное устройство содержит роботизированную руку с захватом, который, в свою очередь, включает в себя две схватывающие лапы, где каждая определяет, по меньшей мере, дистальный конец и проксимальный конец, и привод, где привод управляет механизмом для изменения расстояния, отделяющего дистальные концы лап захвата, для захвата мешка за его нижнюю поверхность. Применение устройства позволяет предотвратить загрязнение продукта, получаемого из крови, во время его выгрузки. 17 з.п. ф-лы, 12 ил.
1. Устройство для опорожнения мешка, содержащего замороженный получаемый из крови продукт, включающее в себя:
- экстрактор (22) продукта;
- воронку (23) для приема продукта;
- устройство для транспортировки мешка от зоны (3) приемки до экстрактора (22) продукта;
- устройство (4) для резки, которое включает в себя режущую кромку, размещенную на траектории мешка между зоной (3) приемки и экстрактором (22) продукта,
отличающееся тем, что указанное транспортировочное устройство включает в себя роботизированную руку (1) с захватом, который, в свою очередь, содержит:
- две захватывающие руки (101, 102), где каждая определяет по меньшей мере один дистальный конец и один проксимальный конец, и
- привод,
где привод управляет механизмом изменения расстояния, отделяющего дистальные концы указанных рук захвата, для захвата мешка за его нижнюю поверхность,
и тем, что устройство (4) для резки является неподвижным лезвием(41).
2. Устройство по п. 1, отличающееся тем, что режущая кромка является верхней режущей кромкой (42), размещенной под траекторией мешка.
3. Устройство по п. 1, отличающееся тем, что режущая кромка находится над воронкой (23) для приема продукта, извлекаемого при помощи экстрактора.
4. Устройство по любому из пп. 1-3, отличающееся тем, что область приемки включает в себя наклонную неподвижную платформу с боковыми стенками, которая содержит дорожку для центрирования и доставки мешков к транспортировочному устройству.
5. Устройство по п. 1, отличающееся тем, что захватывающими руками (101, 102) являются две руки с, по существу, полуэллипсоидальным поперечным сечением, соединенные с роботизированной рукой (1) посредством сочленения.
6. Устройство по п. 1, отличающееся тем, что привод имеет средство для вращения шарнирного соединения.
7. Устройство по п. 1, отличающееся тем, что роботизированная рука содержит ограничитель (104), который размещен на одном из продольных концов мешка, содержащего замороженный продукт, и между этими фиксирующими руками.
8. Устройство по п. 7, отличающееся тем, что ограничитель (104) включает в себя датчик приближения.
9. Устройство по п. 1, отличающееся тем, что устройством (4) для резки является устройство для резки мешка в поперечном направлении.
10. Устройство по п. 1, отличающееся тем, что оно содержит конвейерную ленту для мешков для транспортировки к транспортировочному устройству.
11. Устройство по п. 10, отличающееся тем, что указанная лента является наклонной.
12. Устройство по п. 1, отличающееся тем, что экстрактор (22) продукта включает в себя два валика.
13. Устройство по п. 12, отличающееся тем, что эти валики находятся в контакте.
14. Устройство по любому из пп. 12 и 13, отличающееся тем, что экстрактор продукта включает в себя двигатель (21), связанный с валиками, для их вращения.
15. Устройство по п. 12, отличающееся тем, что эти валики связаны таким образом, что они вращаются в противоположных направлениях.
16. Устройство по любому из пп. 12 и 13, отличающееся тем, что по меньшей мере один валик выполнен из непроскальзывающего материала.
17. Устройство по п. 1, отличающееся тем, что устройством (4) для резки является зазубренное лезвие.
| DE 102009056225 В4, 01.06.2011 | |||
| US 5829634, 02.11.1998 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ЕР 023611 А1, 16.09.1987 | |||
| СПОСОБ ПОЛУЧЕНИЯ БРИКЕТОВ | 0 |
|
SU159792A1 |

