Перекрестная ссылка на родственную заявку
Приоритет данной заявки определяется по датам подачи предварительной патентной заявки США №61/216,339 от 15.05.2009, озаглавленной "System for Combining a Non-invasive Rapid Detection Blood Culture System with an Invasive Microbial Separation and Characterization System"; предварительной патентной заявки США №61/277,862 от 30.09.2009, озаглавленной "Automated Loading Mechanism for Microbial Detection Apparatus", и предварительной патентной заявки США №61/337,597 от 8.02.2010, озаглавленной "Automated Microbial Detection Apparatus". Содержание этих заявок включено в данное описание посредством ссылки на них.
Область техники
Изобретение относится к автоматизированной системе обнаружения присутствия микробного агента (микроорганизмов) в тестируемом (например, биологическом) образце. При этом автоматизированная система по изобретению является усовершенствованием известных систем обнаружения, предназначенных для работы с содержимым контейнеров для хранения и транспортировки образцов (далее - контейнеры для образцов), таких как флаконы с культуральной средой.
Уровень техники
Обнаружение патогенных микроорганизмов в биологических жидкостях желательно производить как можно быстрее, особенно в случае сепсиса, при возникновении которого смертность остается высокой, несмотря на широкий выбор доступных для врачей антибиотиков. Присутствие в жидкости (преимущественно в крови) организма пациента биологически активных агентов, таких как микроорганизмы, обычно определяют с использованием флакона для культивирования крови. Небольшое количество крови инъецируют через резиновую пробку в стерильный флакон, содержащий культуральную среду, после чего флакон инкубируют при 37°С, осуществляя мониторинг роста микроорганизмов.
В настоящее время на американском рынке предлагаются различные приборы, детектирующие рост микроорганизмов в биологическом образце. Одним из таких приборов является прибор BacT/ALERT® 3D, выпускаемый заявителем настоящего изобретения. Устройство принимает флакон для культивирования крови, содержащий образец крови, взятой, например, от человека (пациента). Устройство осуществляет инкубацию флакона. Во время инкубации находящийся в инкубаторе оптический блок обнаружения периодически анализирует состояние колориметрического датчика, встроенного во флакон, чтобы определить, имеет ли место микробный рост внутри флакона. Оптический блок обнаружения, флаконы и датчики описаны в патентной литературе (см, например, патенты США 4945060; 5094955; 5162229; 5164796; 5217876; 5795773 и 5856175, содержание каждого из которых полностью включено в данное описание посредством ссылки). Другие представляющие интерес известные решения, относящиеся к обнаружению микроорганизмов в биологическом образце, описаны в патентах США 5770394, 5518923, 5498543, 5432061, 5371016, 5397709, 5344417, 5374264, 6709857 и 7211430, содержание каждого из которых полностью включено в данное описание посредством ссылки.
Существенные клинические преимущества для пациента (вплоть до спасения его жизни) становятся возможными при условии сокращения времени, необходимого для обнаружения микробного агента в образце крови и доведения этих сведений до лечащего врача. Однако системы, полностью удовлетворяющие этому условию, пока отсутствуют, хотя, в частности, описанный выше прибор уже обеспечивает быстрое обнаружение микробного агента в биологическом образце, таком как образец крови.
Раскрытие изобретения
Предлагаемые система и способы основаны на системе обнаружения, способной определять контейнер, содержащий тестируемый образец (например, биологический), как положительный в отношении присутствия микробного агента. Система и способы согласно изобретению обладают значительным потенциалом для:
(а) сокращения трудозатрат в лаборатории и ошибок со стороны пользователя; (b) улучшенного отслеживания образца и управления информацией; (с) взаимодействия с системами автоматизации лаборатории; (d) улучшенной производительности и эргономики; (е) выдачи релевантной клинической информации; (f) ускоренного получения результатов.
Многие другие достоинства и преимущества изобретения перед уровнем техники станут ясны из дальнейшего описания.
Далее будет описана архитектура автоматизированной системы и устройства, обеспечивающая возможность автоматического обнаружения присутствия микробного агента (например, микроорганизмов) в тестируемом образце, заключенном в контейнере для образцов. В одном варианте автоматизированное устройство для обнаружения представляет собой автоматизированное культивационное устройство для обнаружения роста микробного агента, который содержится или предположительно содержится в тестируемом образце, культивируемом в контейнере для образцов, например во флаконе с культуральной средой.
Контейнер для образцов (например, флакон с культуральной средой), содержащий культуральную среду и тестируемый образец (например, образец крови), в котором, возможно, содержатся микроорганизмы, вводят в автоматизированную систему обнаружения. Система обнаружения содержит корпус, узел держателя и/или взбалтывающий узел для удерживания и/или взбалтывания содержимого контейнера для образцов с целью инициировать или ускорить в нем рост микроорганизмов. В качестве опции, система может содержать один или более нагревательных элементов, чтобы создать нагреваемую полость, т.е. инкубационную камеру. Автоматизированная система обнаружения содержит также один или более блоков обнаружения, который (которые) определяет (определяют), является ли контейнер положительным в отношении присутствия микробного агента в тестируемом образце. Блок обнаружения может обладать признаками, раскрытыми в патентах США 4945060; 5094955; 5162229; 5164796; 5217876; 5795773 и 5856175. Альтернативно, он может использовать другую технологию обнаружения присутствия микробного агента в тестируемом образце. "Положительными" в данном описании именуются контейнеры (например, флаконы), в которых присутствует микробный агент.
В одном варианте устройство по изобретению соответствует автоматизированной системе обнаружения для быстрого неинвазивного обнаружения роста микроорганизмов в тестируемом образце, содержащее: (а) герметизируемый контейнер для образцов, имеющий внутреннюю полость с помещенной в него культуральной средой для культивирования любых микроорганизмов, которые могут присутствовать в тестируемом образце; (b) корпус, окружающий внутреннюю камеру (например, инкубационную камеру, используемую с целью инициировать и/или ускорить рост микроорганизмов); (с) накопитель, который может содержать взбалтывающий узел (например, устройство для придания накопителю колебательного движения), находящийся внутри корпуса и содержащий множество ячеек для размещения контейнеров, причем взбалтывающий узел выполнен с возможностью взбалтывания контейнера для образцов, чтобы инициировать и/или ускорить рост микроорганизмов; (а) узел позиционирования контейнера, выполненный с возможностью перемещения контейнера для образцов к одному или более операционным участкам; (е) автоматический загрузочный механизм для автоматизированной загрузки контейнера для образцов во внутреннюю камеру; (f) автоматический механизм переноса для автоматизированного переноса контейнера для образцов от входа к накопителю и/или для автоматизированного переноса контейнера для образцов внутри корпуса и/или (д) установленный внутри корпуса блок обнаружения для осуществления мониторинга и/или обнаружения роста микроорганизмов в контейнере для образцов.
Предлагается также способ обнаружения роста микроорганизмов в автоматизированной системе обнаружения, включающий следующие операции: (а) обеспечение наличия контейнера для образцов, содержащего культуральную среду, чтобы инициировать и/или ускорить рост указанных микроорганизмов; (b) инокулирование контейнера для образцов образцом, подлежащим тестированию на присутствие микроорганизмов; (с) обеспечение наличия автоматизированного устройства для обнаружения роста микроорганизмов, содержащего: корпус, окружающий инкубационную камеру, обеспечивающую инициирование и/или ускорение роста микроорганизмов, накопитель, находящийся внутри корпуса и содержащий множество ячеек для размещения одного или более контейнеров для образцов, автоматический загрузочный механизм для автоматизированной загрузки контейнера для образцов в автоматизированное устройство для обнаружения, узел позиционирования контейнера для перемещения контейнера для образцов к одному или более операционным участкам, автоматический механизм переноса для автоматизированного переноса контейнера для образцов внутри указанного корпуса к накопителю и блок обнаружения для обнаружения одного или более продуктов, возникающих в результате роста микроорганизмов в контейнере для образцов; (d) загрузку, с использованием автоматического загрузочного механизма, инокулированного контейнера для образцов в устройство для обнаружения; (е) перенос, с использованием автоматического механизма переноса, инокулированного контейнера для образцов к накопителю, находящемуся внутри устройства для обнаружения; (f) инкубирование контейнера для образцов в инкубационной камере и (д) периодический мониторинг контейнера для образцов с целью обнаружения одного или более продуктов, возникающих в результате роста микроорганизмов. При этом контейнер для образцов определяют как положительный в отношении роста микроорганизмов путем обнаружения в нем указанных одного или более продуктов, возникающих в результате роста микроорганизмов.
Еще в одном варианте автоматизированная система обнаружения может содержать один или более операционных участков для проведения одного или более измерений или считываний данных с контейнера для получения информации, такой как тип контейнера, номер партии контейнеров, дата истечения срока годности контейнера, сведения о пациенте, тип образца, тип теста, уровень заполнения, вес и т.д. Так, автоматизированная система обнаружения может содержать один или более из следующих участков: (1) участок считывания штрих-кодов; (2) участок сканирования контейнеров; (3) участок получения изображения контейнера; (4) участок взвешивания контейнера; (5) участок захвата контейнера и/или (6) участок (станцию) переноса контейнера. Согласно этому варианту автоматизированная система обнаружения может дополнительно содержать средство управления контейнером (т.е. узел позиционирования контейнера) для позиционирования и/или перемещения контейнера для образцов между различными операционными участками системы обнаружения.
В другом варианте система обнаружения может дополнительно содержать удерживающее приспособление для удерживания контейнера в накопителе, содержащем одну или более приемных ячеек для размещения одного или более контейнеров. Данное приспособление содержит: (а) скошенную винтовую пружину, расположенную вблизи приемных ячеек, и (b) удерживающую пластину, снабженную v-образной канавкой, примыкающую к скошенной винтовой пружине для удерживания указанной пружины вблизи приемных ячеек. При этом скошенная винтовая пружина обеспечивает удерживание одного или более контейнеров в приемной ячейке или приемных ячейках.
Изобретение направлено также на создание тестирующего устройства для хранения и/или тестирования образца. Устройство содержит: (а) контейнер для образцов с содержащимся в нем тестируемым образцом; (b) корпус, окружающий внутреннюю камеру, и (с) узел позиционирования контейнера, содержащий множество позиционирующих гнезд для помещения в него или в них одного или более контейнеров для образцов и выполненный с возможностью перемещения одного или более контейнеров для образцов к одному или более операционным участкам, находящимся во внутренней камере.
Изобретение направлено также на создание автоматизированного устройства для быстрого неинвазивного обнаружения роста микроорганизмов в тестируемом образце. Данное устройство содержит: (а) герметизируемый контейнер для образцов, имеющий внутреннюю полость с помещенной в него культуральной средой для культивирования любых микроорганизмов, которые могут присутствовать в тестируемом образце; (b) корпус, окружающий внутреннюю камеру; (с) узел позиционирования контейнера для образцов, содержащий одно или более позиционирующих гнезд для приема контейнера для образцов и его перемещения к одному или более операционным участкам, находящимся во внутренней камере, и (а) установленный во внутренней камере блок обнаружения для обнаружения роста микроорганизмов в контейнере для образцов.
Кроме того, изобретение направлено на создание способа автоматизированного управления одним или более контейнерами в устройстве для хранения и/или тестирования образца. Способ включает следующие операции: (а) обеспечение наличия одного или более контейнеров; (b) обеспечение наличия устройства для хранения и/или тестирования, содержащего: корпус, окружающий внутреннюю камеру и содержащий вход и узел позиционирования контейнера, содержащий множество позиционирующих гнезд для помещения в них контейнера и выполненный с возможностью перемещения контейнеров к одному или более операционным участкам, находящимся во внутренней камере для проведения одного или более измерений или считываний данных с контейнера для образцов; и (с) перемещение одного или более контейнеров для образцов к одному или более операционным участкам, находящимся во внутренней камере и проведение одного или более указанных измерений или считываний данных с контейнера для образцов.
Краткое описание чертежей
Различные аспекты изобретения станут более понятными при рассмотрении нижеследующего описания различных вариантов вместе с прилагаемыми чертежами.
На фиг.1 представлена, в перспективном изображении, автоматизированная система для быстрого неинвазивного обнаружения микробного агента в тестируемом образце, содержащая автоматический загрузочный механизм.
На фиг.2 показана, в перспективном изображении, часть системы обнаружения по фиг.1, в которой размещен автоматический загрузочный механизм.
На фиг.3 иллюстрируется, в перспективном изображении, часть системы обнаружения по фиг.1 с показом автоматического загрузочного механизма и выдвинутого нижнего ящика, в котором установлен сборник для выброшенных отрицательных контейнеров с негативным результатом теста на присутствие микробного агента.
На фиг.4 показан, на виде сбоку, один из контейнеров для образцов, протестированный в системе обнаружения по фиг.1-3. Хотя в системе могут использоваться контейнеры различных форм, представленный контейнер сконфигурирован, как флакон для культивирования крови.
На фиг.5А, на виде сбоку, иллюстрируется возможная конфигурация системы по фиг.1.
На фиг.5В система обнаружения по фиг.5А представлена в перспективном изображении, с открытыми верхней и нижней дверцами. Видны внутренние камеры и полки для размещения множества контейнеров типа показанного на фиг.4.
На фиг.6 представлен, в перспективном изображении, механизм переноса, показанный на фиг.5А, 5В и снабженный горизонтальными и вертикальным несущими рельсами. Показаны также первый и второй поворотные механизмы, способные поворачивать механизм переноса вокруг одной или более осей.
На фиг.7А представлены, в перспективном изображении, роботизированная головка и вертикальный несущий рельс, показанный на фиг.5А и 5В. На фиг.7А роботизированная головка имеет вертикальную ориентацию, так что контейнер для образцов, зафиксированный в данной головке, также ориентирован вертикально.
На фиг.7 В представлено другое перспективное изображение роботизированной головки и вертикального несущего рельса. На фиг.7 В роботизированная головка имеет горизонтальную ориентацию, так что контейнер для образцов, зафиксированный в данной головке, также ориентирован горизонтально.
На фиг.8А-8С иллюстрируются этапы загрузки контейнера для образцов в полость роботизированной головки по фиг.7А и 7 В. На фиг.8А показано, как захватный механизм захватывает верхнюю часть контейнера. На фиг.8В контейнер показан на промежуточном этапе процесса загрузки. На фиг.8С контейнер показан после завершения его загрузки в роботизированную головку.
На фиг.9А и 9В представлена, в перспективном изображении и на виде сбоку, альтернативная конфигурация системы обнаружения по фиг.1-3 и 5А-5В с открытыми верхней и нижней дверцами. Видны компоненты альтернативного варианта накопителя. В варианте системы по фиг.9А и 9В накопитель имеет барабанную (цилиндрическую) конфигурацию.
На фиг.10 представлена, в перспективном изображении, другая конфигурация автоматического загрузочного механизма. Видны первая и вторая транспортерные ленты, перемещающиеся соответственно в горизонтальной и в вертикальной плоскостях.
На фиг.11 представлена, в перспективном изображении, еще одна конфигурация автоматического загрузочного механизма. Видны первая транспортерная лента, перемещающаяся в горизонтальной плоскости, и вторая транспортерная лента, снабженная множеством пластин и перемещающаяся в вертикальной плоскости.
На фиг.12 показаны, в перспективном изображении, крышка и кожух, в котором размещен автоматический загрузочный механизм.
На фиг.13 в перспективном изображении показан вариант автоматического загрузочного механизма, отделенный от системы обнаружения. В соответствии с этим вариантом автоматический загрузочный механизм содержит станцию загрузки, транспортный механизм и вход для полностью автоматизированной загрузки контейнера для образцов. Часть одной стороны станции загрузки удалена, чтобы показать дополнительные детали автоматического загрузочного механизма в этом варианте.
На фиг.14 представлено другое перспективное изображение автоматического загрузочного механизма по фиг.13. Чтобы нагляднее показать особенности автоматического загрузочного механизма, станция загрузки представлена как наблюдаемая через прозрачную стенку.
На фиг.15 в увеличенном масштабе и в перспективном изображении показаны выделенные из системы обнаружения загрузочного механизма барабанного типа, вертикальный желоб, узел позиционирования и механизм переноса по фиг.14.
На фиг.16 в поперечном разрезе представлен автоматический загрузочный механизм по фиг.14-15. Более конкретно, на фиг.16 показаны загрузочный механизм барабанного типа и вертикальный желоб в момент, когда по нему падает контейнер для образцов. Как показано на фиг.16, верхняя часть (колпачок) контейнера для образцов кратковременно удерживается скошенным выступом, тогда как его нижняя часть опускается по желобу, придавая контейнеру для образцов вертикальную ориентацию.
На фиг.17 представлено, в перспективном изображении, автоматизированное устройство для обнаружения, содержащее автоматический загрузочный механизм, показанный на фиг.14. Показано, что станция загрузки в составе автоматического загрузочного механизма находится в легкодоступном для пользователя месте, на передней стороне автоматизированной системы для быстрого неинвазивного обнаружения микробного агента. Автоматизированная система обнаружения и станция загрузки контейнеров представлены со снятыми боковыми панелями, чтобы показать компоненты, которые будут описаны далее.
На фиг.18 представлено, в перспективном изображении, автоматизированное устройство для обнаружения, содержащее альтернативный загрузочный механизм. Станция загрузки контейнеров в составе этого загрузочного механизма находится в легкодоступном для пользователя месте, на передней стороне автоматизированной системы для быстрого неинвазивного обнаружения микробного агента. Автоматизированная система обнаружения и станция загрузки контейнеров показаны при снятых боковых панелях, чтобы показать другие компоненты системы.
На фиг.19, на виде сбоку, представлена нижняя часть автоматизированной системы для быстрого неинвазивного обнаружения микробного агента, показанной на фиг.17. Данная система изображена при снятых боковых панелях, чтобы показать другие ее компоненты.
На фиг.20 представлены, в перспективном изображении, накопитель и автоматический механизм переноса, показанные на фиг.17-19. Видно, что в этом варианте для переноса контейнера для образцов внутри устройства для обнаружения автоматический механизм переноса содержит нижний горизонтальный несущий рельс, вертикальный несущий рельс, поворачивающую плиту и роботизированную головку. Для наглядности, накопитель и автоматический механизм переноса показаны отдельно от устройства для обнаружения.
На фиг.21А-21В в перспективном изображении представлены поворотная пластина и роботизированная головка автоматического механизма переноса по фиг.20. Захватный механизм и контейнер для образцов роботизированной головки показаны в разрезе, чтобы пояснить конструкцию захватного механизма. На фиг.21А роботизированная головка показана на первом конце поворачивающей плиты и в горизонтальной ориентации, так что контейнер для образцов также имеет горизонтальную ориентацию. На фиг.21В роботизированная головка показана находящейся на втором конце поворачивающей плиты и в вертикальной ориентации; соответственно; контейнер для образцов также имеет вертикальную ориентацию.
На фиг.22 представлена, в перспективном изображении, альтернативная конфигурация автоматизированного устройства для обнаружения. Показаны пользовательский интерфейс, экран статуса, крышка узла позиционирования и два выходных порта для положительных контейнеров.
На фиг.23 представлена, в перспективном изображении, другая конфигурация системы обнаружения. Как показано на фиг.23, данная система содержит первое устройство для обнаружения и второе устройство для обнаружения.
На фиг.24 представлен, в перспективном изображении, еще один вариант автоматизированной системы обнаружения. Она содержит первое устройство для обнаружения, имеющее автоматический загрузочный механизм, и второе (последующее) устройство для обнаружения, образующее вместе с первым устройством для обнаружения функциональную цепочку.
На фиг.25А-25С показан механизм с толкателем для проталкивания контейнера для образцов от первого устройства для обнаружения ко второму (последующему) устройству для обнаружения.
На фиг.26 представлены, в перспективном изображении и отдельно от системы обнаружения, накопитель и взбалтывающий узел.
На фиг.27А представлены, в перспективном изображении, накопитель и удерживающее приспособление для надежного удерживания контейнера для образцов внутри накопителя.
На фиг.27 В накопитель и удерживающее приспособление по фиг.27А представлены в поперечном разрезе.
На фиг.27С накопитель и удерживающее приспособление по фиг.27А представлены на виде сверху, в разрезе, чтобы нагляднее показать схематично изображенную скошенную винтовую пружину.
На фиг.28А-28В представлены перспективные изображения поддона для переноса множества контейнеров для образцов к устройству для обнаружения. Поддон содержит множество приемных гнезд для удерживания множества контейнеров для образцов. На фиг.28А показаны также две противолежащие рукоятки и механизм для освобождения множества контейнеров для образцов в зоне загрузки.
На фиг.29 представлена, в перспективном изображении, другая возможная конфигурация системы обнаружения. Показанная на фиг.29 система обнаружения содержит механизм для освобождения одного или более контейнеров для образцов из поддона по фиг.28А-28В.
На фиг.30 представлена блок-схема операций, выполняемых в процессе функционирования системы обнаружения.
Осуществление изобретения
Далее будут описаны автоматизированная система (автоматизированное устройство) для неинвазивного обнаружения присутствия микробного агента (т.е. микроорганизмов) в тестируемом образце, содержащемся в контейнере для образцов, например во флаконе с культуральной средой. Один из вариантов такой системы (такого устройства) будет далее описан со ссылками на фиг.1-8С. Другие возможные варианты и альтернативные конструкции будут описаны со ссылками на фиг.9А-30. Автоматизированная система может содержать одну или более из следующих частей:
(1) корпус, окружающий внутреннюю камеру; (2) автоматический загрузочный механизм для загрузки одного или более контейнеров во внутреннюю камеру системы; (3) автоматический механизм управления контейнерами (узел позиционирования контейнера) для перемещения или позиционирования контейнера между различными операционными участками, находящимися внутри системы; (4) автоматический механизм переноса для переноса контейнера внутри системы; (5) один или более накопителей для размещения множества контейнеров для образцов, который (которые) можно дополнительно снабдить взбалтывающим узлом; (6) блок обнаружения для обнаружения микробного роста и/или (7) выгружающий механизм для автоматизированной выгрузки контейнера для образцов из системы. Чтобы сделать функционирование этого варианта устройства более понятным, в нижеследующем описании оно будет рассматриваться на примере конкретного применения устройства (для тестирования образцов крови) и конкретного контейнера для образцов (в виде флакона для культивирования крови). Однако для специалистов будет очевидно, что устройство согласно изобретению может использоваться и в других вариантах и что возможны различные модификации описываемых далее вариантов, соответствующие конкретным применениям. Соответственно, описываемые предпочтительные варианты осуществления изобретения приводятся только в иллюстративных целях, не ограничивая изобретения.
Общая характеристика системы
Рассматриваемая автоматизированная система 100 обнаружения (например, типа представленной на фиг.1-3 и 5А-5В) обладает новой архитектурой и обеспечивает осуществление нового способа автоматизированного обнаружения микробного агента (микроорганизма), который может присутствовать в тестируемом образце или пробе. Может использоваться, по существу, любой пригодный для тестирования образец (например, биологической). В частности, тестируемым образцом может служить клинический или неклинический образец, который предположительно содержит один или более микробных агентов. Клинические образцы, такие как жидкости организма, включают (не ограничиваясь ими) кровь, серозную жидкость, плазму и другие фракции крови, комбинированные жидкости, мочу, семенную жидкость, слюну, испражнения, спинномозговую жидкость, содержимое желудка, вагинальные секреты, тканевые гомогенаты, аспираты костного мозга, костные гомогенаты, мокроту, аспираты, мазки и смывы, а также другие жидкости организма и подобные среды. Пригодные для тестирования образцы, не являющиеся клиническими, могут включать (не ограничиваясь приводимыми примерами) пищевые продукты, безалкогольные напитки, лекарства, косметику, воду (например, питьевую, непитьевую или загрязненную воду), балластную морскую воду, воздух, почву, сточные воды, растительный материал (например, семена, листья, стебли, корни, цветы, плоды), компоненты крови (например, тромбоциты, сыворотку, плазму, фракции белых кровяных телец и др.), образцы донорского органа или ткани, образцы бактериологического оружия и т.д. В одном варианте тестируемым биологическим образцом является образец крови.
Представленная на чертежах система 100 обнаружения может иметь различные конфигурации. Например, как показано на фиг.1-3 и 5А-5В, автоматизированная система 100 обнаружения содержит корпус 102 и один или более механизмов, загружающих (см., например, механизм 200 на фиг.1), перемещающих или позиционирующих (не изображены), переносящих (см, например, механизм 650 на фиг.5А-5В), взбалтывающих (не изображены) и/или загружающих/выгружающих контейнеры 500 для образцов в систему/из системы 100 обнаружения. У корпуса 102 имеются передняя и задняя панели 104А и 104В, противолежащие боковые панели (левая и правая) 106А, 106В, верхняя панель 108А и нижняя панель (дно) 108 В, которые окружают внутреннюю камеру 620 (см., например, фиг.5А-5В) системы 100. В одном варианте внутренняя камера 620 системы 100 обнаружения является камерой с контролируемой атмосферой (например, инкубационной камерой с контролируемой температурой, поддерживаемой у 37°С), чтобы способствовать микробному росту или ускорять его. Как показано на фиг.1-3, корпус может иметь также первый (входной) порт 110 для ввода контейнеров, второй порт 120 (зону для неидентифицированных контейнеров), третий порт 130 (зону для "положительных" контейнеров), нижнюю панель 140 доступа (фиг.1) или ящик 142 (фиг.3) и/или дисплей пользовательского интерфейса 150. Как обычно, у нижней панели 140 доступа или ящика 142 может иметься ручка 144. Как показано на фиг.1, корпус 102 может быть разделен на верхнюю и нижнюю секции 160 и 170, у каждой из которых может иметься дверца (соответственно верхняя и нижняя дверцы 162 и 172 - см., например, фиг.5 В). Верхняя и нижняя дверцы 162 и 172 обеспечивают доступ во внутреннюю камеру 620 системы 100 обнаружения. Однако специалистам будет понятно, что возможны и другие конструктивные выполнения. Так, в другом возможном варианте на всей передней панели может находиться единственная дверца (не изображена).
Как показано, например, на фиг.1-3, в одном варианте нижняя секция 170 может иметь большую высоту и большее поперечное сечение, чем верхняя секция 160. В соответствии с этим вариантом на верхней поверхности корпуса нижней секции 170 сформирована полка 180, примыкающая к верхней секции 160, т.е. расположенная перед ней. Эта полка может служить для пользователя рабочей зоной и/или зоной доступа к входному потоку контейнеров в системе 100 обнаружения. Кроме того, на полке 180 может быть установлено автоматическое загрузочное средство (автоматический загрузочный механизм) 200. На полке 180 могут также находиться зоны доступа к первому порту (входу для контейнеров) 110, ко второму порту (зоне для несчитанных контейнеров) 120 и к третьему порту (зоне для "положительных" контейнеров) 130.
В одном варианте, как показано, например, на фиг.1-3 и 5А-5 В, система 100 обнаружения может содержать автоматический загрузочный механизм 200 для автоматизированной загрузки контейнера 500 для образцов в систему 100 обнаружения. Данный механизм может содержать станцию (зону) 202 загрузки контейнеров, транспортный механизм 204 и входной порт (вход для контейнеров) 110. При использовании системы пользователь (например, лаборант) может ввести один или более контейнеров 500 для образцов (см., например, фиг.4) в зону 202 загрузки контейнеров. Транспортный механизм 204, например его транспортерная лента 206, перенесет контейнер для образцов к первому порту (входу для контейнеров) 110 и далее, через данный порт внутрь системы 100 обнаружения, т.е. загрузит контейнер в систему. Далее автоматический загрузочный механизм 200 будет описан более подробно.
Специалисту должна быть понятна возможность использования других конструкций автоматического загрузочного механизма, некоторые из которых также будут описаны далее. Так, примеры альтернативных автоматических загрузочных механизмов показаны на фиг.10-16. В одном варианте, представленном на фиг.13-16 и более подробно описанном далее, в системе 100 обнаружения может иметься зона 302 загрузки контейнеров в виде емкости, а с целью автоматизированной загрузки контейнера для образцов в систему 100 обнаружения может быть применено загрузочное устройство 308 барабанного типа.
В другом варианте, как показано, например, на фиг.14-15 и 18, автоматизированная система 100 обнаружения может содержать один или более операционных участков 404, служащих для выполнения одного или более измерений, снятий отсчетов, сканирований и/или получения изображений контейнера для образцов с обеспечением тем самым информации, такой как тип контейнера, номер партии контейнеров, дата истечения срока годности контейнера, сведения о пациенте, тип образца, тип теста, уровень заполнения, вес и т.д. Кроме того, один или более операционных участков 404 могут содержать один или более участков выполнения операций с контейнерами, таких как участок захвата контейнера или участок (станцию) переноса контейнера. Например, автоматизированная система обнаружения может содержать один или более из следующих участков контроля: (1) участок считывания штрих-кодов; (2) участок сканирования контейнеров; (3) участок получения изображения контейнера; (4) участок взвешивания контейнера; (5) участок захвата контейнера и/или (6) участок (станцию) переноса контейнера. В соответствии с данным вариантом система 100 обнаружения может дополнительно содержать средство 400 управления контейнером (узел позиционирования контейнера), показанное (показанный), например, на фиг.13-15, 18 и 24. При использовании узла 400 позиционирования он перемещает контейнер 500 для образцов так, чтобы поместить его на один или более операционных участков 404. Согласно одной конфигурации один или более операционных участков находятся внутри корпуса 102 системы 100 обнаружения. В одном варианте, наиболее наглядно представленном на фиг.13-15, чтобы поместить контейнер для образцов в позиционирующее гнездо 402 (которое будет описано далее), могут использоваться барабанное или аналогичное загрузочное устройство 308 и вертикально ориентированный желоб 332 автоматического загрузочного механизма 300. В другом варианте (см. фиг.18 и 24) для установки контейнера для образцов в позиционирующее гнездо 402 может использоваться транспортный механизм 204 или транспортерная лента 206 автоматического загрузочного механизма 200. Как известно специалистам, система 100 обнаружения может также содержать один или более направляющих рельсов (не изображены), по которым контейнер для образцов попадает в позиционирующее гнездо 402. Затем, в соответствии с любым из этих вариантов, средство 400 управления контейнером (узел позиционирования) может быть приведено (приведен) во вращение, чтобы подводить контейнер для образцов к различным имеющимся в системе операционным участкам 404, например таким, как участок считывания штрих-кодов, участки сканирования контейнеров, участок получения изображения контейнера, участок взвешивания контейнера, участок захвата контейнера и/или участок переноса контейнера. Узел 400 позиционирования будет описан далее более подробно.
Как показано, например, на фиг.5А-8С, система 100 обнаружения может содержать также автоматическое средство (автоматический механизм) 650 переноса для переноса контейнера 500 для образцов внутри корпуса 102 системы 100 обнаружения. Данный механизм может, например, переносить контейнер 500 для образцов от входного порта 110 (см., например, фиг.1-3) во внутреннюю камеру 620 системы 100 обнаружения и подавать контейнер 500 в один из приемных элементов типа ячейки 602, имеющийся в одном из множества накопителей 600, выполненных в виде полок. В другом варианте механизм 650 переноса может быть использован для осуществления других действий по управлению контейнером 500 для образцов или по его переносу внутри системы. Так, в одном варианте механизм 650 переноса может быть применен для переноса контейнера 500 для образцов, давшего положительный результат в отношении микробного роста (далее именуемого положительным контейнером), от накопителя (полки) 600 в зону для положительных контейнеров (выходной порт 130) (см., например, фиг.1), откуда пользователь (лаборант) может легко забрать положительный контейнер 500. В другом варианте механизм 650 переноса может быть использован для переноса контейнера 500, давшего, по истечении заданного времени, отрицательный результат в отношении микробного роста (и именуемого далее отрицательным контейнером), от накопителя (полки) 600 в зону для отрицательных контейнеров внутри системы, например в сборник 146 сброшенных отрицательных контейнеров (см., например, фиг.1), к которому пользователь (лаборант) имеет легкий доступ для извлечения и выбрасывания контейнера 500. Специалисту должна быть ясна возможность альтернативных конструкций автоматического механизма переноса, в том числе описываемых далее, например в связи с фиг.17-21В.
Система 100 обнаружения содержит также средство обнаружения микробного роста в контейнере 500 для образцов (например, блок обнаружения, показанный на фиг.27). Для обнаружения микробного роста в контейнере может быть использовано практически любое подходящее средство. Например, как это хорошо известно из уровня техники, каждый накопитель (полка) 600 может содержать линейный оптический сканер, способный осуществлять неинвазивный мониторинг роста микроорганизмов в каждом контейнере 500 для образцов. В одном варианте с целью обнаружения роста микроорганизмов в контейнере оптический сканер может опрашивать датчики (например, сенсоры эмульсии) 514 (см., например, фиг.27В), находящиеся внутри контейнеров 500.
Система 100 обнаружения может содержать, кроме того, автоматический выгружающий механизм для выгрузки положительных и/или отрицательных контейнеров 500 для образцов. Этот механизм может обеспечивать удаление каждого контейнера 500 для образцов из приемного элемента (ячейки) 602 (см., например, фиг.5А и 5В) после того, как для этого контейнера будет получен "положительный" или "отрицательный" сигнал, чтобы освободить место для другого контейнера, подлежащего загрузке в систему 100 обнаружения, и повысить за счет этого производительность системы.
Контейнер для образцов
Контейнер 500 для образцов, показанный, например, на фиг.4 и 27 В, может являться стандартным флаконом с культуральной средой (например, флаконом для культивирования крови). Однако такой флакон с культуральной средой рассматривается только в качестве неограничивающего примера. Как показано на фиг.4, у контейнера 500 для образцов имеются верхняя часть 502, тело 504 и основание 506. На контейнере 500 может иметься этикетка 508 со штрих-кодом для автоматического считывания данных с контейнера 500 в системе обнаружения или во внешнем оборудовании. Как показано на фиг.4 и 27 В, верхняя часть 502 контейнера 500 в типичном варианте имеет горло 510, через которое проходит отверстие 516, открывающее доступ к внутренней полости 518 контейнера. Как показано на фиг.27В, у контейнера имеется также закрывающий элемент 512, например пробка (которая может быть прокалываемой), а также датчик 514 (например, сенсор эмульсии), сформированный в контейнере 500 или помещенный на его дно для обнаружения, методом колориметрии, микробного роста в контейнере 500. Конфигурация контейнера 500 не является существенным фактором, поскольку система и способы согласно изобретению могут быть адаптированы к различным контейнерам, предназначенным для культивирования тестируемых (например, биологических) образцов. Контейнеры 500 типа показанных на фиг.4 и 27В хорошо известны; так, они описаны в патентах, упомянутых в разделе "Уровень техники".
В одном варианте контейнеры 500 для образцов засевают (инокулируют) тестируемым (например, клиническим или неклиническим биологическим) образцом и загружают (а затем выгружают) в систему (из системы) 100 обнаружения. Контейнер 500 может также содержать культуральную среду (не изображена), способствующую росту и/или ускоряющую рост микробов (микроорганизмов). Использование культуральной среды (или культуральных сред) для культивирования микроорганизмов хорошо известно. Подходящая культуральная среда, обеспечивающая требуемые питательные и окружающие условия для роста микроорганизмов, должна содержать нутриенты, необходимые микроорганизму, подлежащему культивации в контейнере 500 для образцов. По истечении временного интервала, достаточного для естественного умножения количества микроорганизмов (который варьирует в зависимости от их вида), контейнер 500 тестируют в системе 100 обнаружения на присутствие роста микробов (микроорганизмов). Тестирование может производиться в непрерывном или периодическом режиме, чтобы, как можно скорее, выявить контейнер, положительный в отношении роста микроорганизмов.
В одном варианте, как только контейнер 500 будет определен системой 100 обнаружения как положительный, она уведомит оператора, например, выдачей визуального сигнала посредством индикатора 190 и/или сообщения на дисплей пользовательского интерфейса 150 или иным образом.
Автоматический загрузочный механизм
Система 100 обнаружения может содержать загрузочный механизм для автоматизированной загрузки контейнера 500 для образцов в систему 100 обнаружения. В одном варианте, как показано, например, на фиг.1-3 и 5А-5В, автоматический загрузочный механизм 200 может содержать станцию (зону) 202 загрузки контейнеров, транспортный механизм 204 и порт (вход) 110 для контейнеров. Однако, как будет понятно специалисту, автоматический загрузочный механизм может иметь много различных конфигураций. Так, со ссылкой на фиг.13-16, в качестве неограничивающего примера, будет описан автоматический загрузочный механизм 300, имеющий иную конструкцию. Представленные (например, на фиг.1-3, 5А-5В и 13-16) автоматические загрузочные механизмы изображены схематично и с частичным нарушением масштаба.
Пользователь (лаборант) может с помощью любых известных средств доставить один или более контейнеров 500 для образцов к системе 100 обнаружения и поместить его (их) в зону 202 загрузки контейнеров. Например, в одном варианте пользователь (лаборант) для доставки образцов к зоне 202 загрузки в составе системы 100 обнаружения может использовать специальный поддон, рассчитанный на большое количество контейнеров.
Возможный вариант такого поддона 350 показан на фиг.28А и 28В. Он содержит основание 351, имеющее верхнюю и нижнюю поверхности 352А и 352В соответственно, переднюю и заднюю поверхность 354А и 354В соответственно, противолежащие боковые поверхности (например, правую и левую поверхности) 356А и 356В, а также пару противолежащих рукояток 358А и 358 В для пользователя, прикрепленных соответственно к боковым поверхностям 356А, 356В. В основании выполнено множество сквозных отверстий 360, каждое из которых рассчитано на удерживание внутри него единственного контейнера 500 для образцов. Основание 351 может содержать также выдвижную пластину 362, которая может двигаться вперед/назад (как это показано стрелкой 366 на фиг.28А) по направляющим 364 скольжения между положением "запирания", в котором контейнеры 500 для образцов закреплены в поддоне 350, и "открытым" положением, в котором контейнеры 500 для образцов могут быть убраны с поддона 350 и помещены в автоматический загрузочный механизм. Направляющие 364 могут быть дополнительно снабжены пружиной или аналогичным средством для закрепления пластины 362 в положение "запирания" на время доставки пользователем контейнеров к системе обнаружения.
Как показано на фиг.28А, 29, поддон 350 может содержать также пару позиционирующих рычажков 368А, 368В и фиксирующую защелку 370, взаимодействующих с механизмом 372 освобождения контейнеров 500 для образцов с установкой их в автоматический загрузочный механизм 200 системы 100 обнаружения. У механизма освобождения имеется пара прорезей 374, которая соответствует паре позиционирующих рычажков 368А и 368В, что обеспечивает точное позиционирование поддона 350 в зоне 202 загрузки контейнеров 500 для образцов. В механизме имеется также освобождающий стержень 376. При использовании системы лаборант доставляет поддон 350, несущий один или более контейнеров 500 для образцов, к автоматическому загрузочному механизму 200 и прижимает поддон к освобождающему стержню 376, когда положение рычажков 368А и 368В согласовано с положением соответствующих им прорезей 374 механизма 372 освобождения. В результате прижатия поддона 350 к стержню 376 фиксирующая защелка 370 отжимается внутрь, переводя выдвижную пластину 362 в "открытое" положение, что позволяет контейнерам 500 для образцов опуститься из сквозных отверстий 360 в зону 202 загрузки. После этого лаборант может поднять поддон 350 настолько, чтобы его основание 351 со сквозными отверстиями 360 освободило контейнеры 500 для образцов, так что контейнеры оказываются введенными в автоматический загрузочный механизм 200 для их автоматизированной загрузки в систему 100 обнаружения. Специалисту должно быть понятно, что возможны и иные конфигурации описанных устройств.
Как показано на фиг.1-3, станция (зона) 202 загрузки соответствует легкодоступному участку автоматического загрузочного механизма 200, куда пользователь (лаборант) может поместить один или более контейнеров 500 для образцов с целью их загрузки в систему 100 обнаружения. Помещенные в зону 202 загрузки контейнеры 500 будут перемещены с помощью транспортного механизма 204 из этой зоны к входному порту 110, а затем, через этот порт, внутрь системы 100 обнаружения. Таким образом, пользователь (лаборант) может просто поместить один или более контейнеров 500 для образцов в зону 202 загрузки и отойти, а контейнеры 500 будут автоматически загружены в систему 100 обнаружения. После переноса контейнеров 500 для образцов в систему они могут быть перемещены, с помощью узла позиционирования, к одному или более операционным участкам и/или к накопителю (полке) (как это будет описано далее).
В одном варианте, представленном на фиг.1-3, 5А и 5В, транспортный механизм 204 является транспортерной лентой 206, способной транспортировать контейнеры 500 к входному порту 110 и далее, через этот порт, внутрь системы 100 обнаружения. Другие возможные варианты средств или механизмов для транспортирования контейнеров 500 для образцов из зоны 202 загрузки к входному порту 110 могут содержать (не ограничиваясь ими) такие компоненты, как, например, подающие винты или синхронизирующие ленты, снабженные соответствующими канавками или пластинами. В других вариантах процесс автоматизированной загрузки контейнера 500 для образцов внутрь системы 100 обнаружения может предусматривать (как будет описано далее) перенос контейнера к накопителю (полке) с использованием механизма 650 переноса или перемещение контейнера к одному или более операционным участкам с использованием узла 400А позиционирования контейнера (см., например, фиг.24).
Как показано на фиг.1-3, 5А и 5В, зона 202 загрузки и транспортный механизм 204 содержат транспортерную ленту 206. Согласно данному варианту для автоматизированной загрузки контейнеров 500 в систему 100 обнаружения пользователь (лаборант) может поместить один или более контейнеров 500 для образцов на определенный участок транспортерной ленты 206 (например, в зоне 202 загрузки). Данная лента может перемещаться непрерывно или активироваться физическим присутствием контейнера 500 в зоне 202 загрузки. Например, контроллер системы может быть использован для управления транспортерной лентой 206 (т.е. для приведения ее в движение или отключения) в зависимости от сигнала (например, от оптического датчика), указывающего на присутствие или отсутствие одного или более контейнеров для образцов в зоне 202 загрузки. Аналогично, можно использовать один или более датчиков у входного порта 110 для выдачи сигнала, если контейнер был загружен неправильно и/или упал, что может привести к заклиниванию ленты. Транспортерная лента 206 осуществляет транспортирование контейнеров 500 из зоны 202 загрузки (в варианте по фиг.1 этой зоне соответствует, например, левый участок транспортерной ленты 206) к входному порту 110, обеспечивая накопление контейнеров 500 у входного порта 110 для их ввода в систему 100 обнаружения. В типичной ситуации, представленной на фиг.1-3 и 5А-5В, зона 202 загрузки, транспортный механизм 204 (или транспортерная лента 206) и входной порт 110 находятся снаружи корпуса 102 системы 100 обнаружения или на нем. В одном варианте автоматический загрузочный механизм 200 установлен на полке 180, расположенной на верхней стороне нижней секции 170 смежно с верхней секцией 160 корпуса системы 100. При этом транспортный механизм или транспортерная лента 206, как правило, обеспечивает перемещение в горизонтальной плоскости, чтобы сохранить вертикальную ориентацию контейнеров 500 для образцов (при которой верхняя часть 502 контейнера 500 находится сверху) при их загрузке в систему 100 обнаружения (см., например, фиг.1-3 и 5А-5В). Как показано на фиг.1-3, транспортерная лента 206 переносит один или более свободно стоящих на ней контейнеров 500, например, слева направо (как это показано стрелкой 208 на фиг.2), т.е. из зоны 202 загрузки к входному порту 110.
Как показано на фиг.1-3 и 10-11, в одном варианте автоматический загрузочный механизм 200 содержит также одну или более вертикальных направляющих пластин 210, прикрепленных к одной или обеим сторонам транспортерной ленты 206. При работе транспортного механизма (транспортерной ленты 206) эти направляющие пластины 210 направляют контейнер 500 для образцов к входному порту 110. В одном варианте эти пластины обеспечивают выстраивание контейнеров для образцов в одну линию у задней части автоматического загрузочного механизма 200, где они ожидают своей очереди для поочередной загрузки в систему 100 обнаружения. В другом конструктивном варианте, представленном, например, на фиг.22, система 100 обнаружения может дополнительно содержать кожух 460, накрывающий узел позиционирования (описываемый далее), формируя внутреннюю камеру узла позиционирования (не изображена). Этот кожух 460 может также содержать одну или более направляющих пластин 462, направляющих контейнер 500 для образцов при его перемещении от автоматического загрузочного механизма 200 к входному порту 110 и, далее, во внутреннюю камеру, с обеспечением автоматического ввода образцов в систему. Согласно этому варианту внутренняя полость узла позиционирования (не изображена) рассматривается как часть внутренней камеры.
Еще в одном варианте автоматический загрузочный механизм 200 может дополнительно содержать средство (устройство) для считывания данных или для иной идентификации контейнеров 500 для образцов при их входе в систему 100 обнаружения. Например, контейнеры 500 могут иметь этикетку 508 со штрих-кодом, которая может быть считана для идентификации контейнера и его отслеживания внутри системы. Согласно этому варианту система 100 обнаружения содержит один или более считывателей 410 штрих-кодов (см. фиг.14-15), установленных в одной или более зонах внутри системы. Так, система 100 обнаружения может иметь считыватель штрих-кодов у входного порта 110, чтобы считывать данные, идентифицировать и регистрировать индивидуальные контейнеры 500 в контроллере системы обнаружения в момент их входа в систему. В другом варианте входной порт 110 может дополнительно содержать средство (устройство) (например, поворотный столик, который будет описан далее) для вращения контейнера внутри входного порта 110, чтобы обеспечить считывание этикетки 508 со штрих-кодом. В другом возможном варианте сам механизм 650 переноса (см., например, фиг.5 В) может вращать контейнер 500, чтобы обеспечить считывание этикетки 508 со штрих-кодом. После того как штрих-код будет считан, механизм переноса, как правило, переносит контейнер 500 от входного порта 110 к одному из множества приемных элементов 602 в одном из накопителей 600.
Еще в одном варианте, если штрих-код с этикетки 508 не мог быть правильно считан (например, в случае дефекта этикетки или ошибки считывания), контроллер системы обнаружения (не изображен) может направить контейнер 500 к зоне для неидентифицированных контейнеров (к порту 120), где пользователь имеет доступ к таким контейнерам. При этом пользователь может, по своему желанию, повторно загрузить контейнер 500 с помощью автоматического загрузочного механизма 200 или вручную и, также вручную (например, через пользовательский интерфейс 150), ввести информацию о контейнере 500 в контроллер системы. В другом варианте система 100 обнаружения может содержать приоритетную станцию загрузки (не изображена) для ввода контейнеров, имеющих высокий приоритет, и/или для ручной загрузки контейнеров, которые имеют дефектную этикетку или в отношении которых произошла ошибка считывания.
На фиг.10 представлена другая конструкция автоматического загрузочного механизма 200. Как показано на фиг.10, этот механизм содержит зону (станцию) 202 загрузки, первую транспортерную ленту 206 и входной порт 110. Транспортерная лента 206 осуществляет перенос контейнеров 500 для образцов от левого края системы 100 (где находится зона 202 загрузки) к входному порту 110. В этом примере (как это показано стрелкой 220 на фиг.10) движение происходит слева направо. Автоматический загрузочный механизм 200 может содержать также направляющую пластину 210 и вторую транспортерную ленту 212, движущуюся вокруг блоков или шестерен 214, 216. Согласно этому варианту вторая транспортерная лента 212 ориентирована и перемещается в вертикальной плоскости над первой, горизонтальной транспортерной лентой 206. При этом она может двигаться по часовой или против часовой стрелки. В зависимости от направления движения второй, вертикально ориентированной транспортерной ленты 212 она может придавать контейнеру 500 для образцов вращение вокруг его вертикальной оси соответственно против часовой стрелки или по часовой стрелке. Авторы обнаружили, что придание контейнеру 500 для образцов вращения по часовой или против часовой стрелки может предотвратить и/или уменьшить вероятность заедания или заклинивания автоматического загрузочного механизма 200 в случае накапливания большого количества контейнеров 500 для образцов у входного порта 110. Как только контейнеры 500 заходят во входной порт 110, они могут беспрепятственно вводиться внутрь системы 100 обнаружения.
Еще в одном варианте автоматический загрузочный механизм 200 может содержать также опорную пластину (не изображена), расположенную горизонтально под первой транспортерной лентой 206. Как известно специалистам, транспортерная лента 206 может быть нежесткой и обладать гибкостью, так что она может рассматриваться как "пружинящая". Данное свойство транспортерной ленты 206 может вести к нестабильности контейнера 500 для образцов при его переносе транспортерной лентой 206 от зоны 202 загрузки к первому порту 110, что может приводить к наклону или падению контейнеров 500 для образцов. Авторы установили, что введение под транспортерную ленту 206 жесткой или полужесткой опорной пластины может ослабить или полностью устранить данную проблему и, тем самым, снизить вероятность и/или предотвратить заедание или заклинивание загрузочного механизма 200 (например, упавшими контейнерами 500). Допустимо использование опорной пластины из, по существу, любого подходящего материала. Так, эта жесткая или полужесткая пластина может быть изготовлена из пластика, дерева или металла.
Следующая конфигурация автоматического загрузочного механизма показана на фиг.11. Представленный здесь автоматический загрузочный механизм 200 может содержать зону 202 загрузки, транспортерную ленту 206 и входной порт 110. Видно, что транспортерная лента 206 способна перемещать контейнеры 500 для образцов от переднего края системы 100 (где находится зона 202 загрузки) к входному порту 110. В этом примере загрузочный механизм 200 обеспечивает движение от передней стороны (т.е. от переднего края) устройства к входному порту 110, как это показано стрелкой 240 на фиг.11. Представленный автоматический загрузочный механизм 200 может содержать также одну или более направляющих пластин 210, чтобы точнее направлять один или более контейнеров 500 для образцов к входному порту 110 при их перемещении посредством транспортерной ленты 206.
Как показано на фиг.11, автоматический загрузочный механизм 200 в этом варианте, в качестве опции, может содержать второй транспортный механизм 230. В одном варианте второй транспортный механизм 230 может содержать вторую транспортерную ленту 232, которая ориентирована и перемещается в вертикальной плоскости над первой, горизонтальной транспортерной лентой 206. Видно также, что второй транспортный механизм 230 может содержать множество лопаток (пластин) 236, прикрепленных ко второй транспортерной ленте 232. Согласно этому варианту первая транспортерная лента 206 обеспечивает перемещение одного или более контейнеров 500 для образцов от зоны 202 загрузки ко второму транспортному механизму 230, в котором контейнеры 500 перемещаются, находясь в индивидуальных ячейках 234 между лопатками 236. Вторая транспортерная лента 232 движется вокруг шестерен или приводных шкивов (не изображены), при этом у заднего края автоматического загрузочного механизма 200 она движется, например, слева направо, транспортируя контейнеры 500 в этом направлении (обозначенном стрелкой 250) вдоль заднего края загрузочного механизма 200 к входному порту 110. Как только контейнеры 500 заходят во входной порт 110, они могут беспрепятственно вводиться в систему 100 обнаружения.
Еще в одном варианте автоматический загрузочный механизм 200 может быть заключен в защитный кожух 260, как это показано на фиг.12. Согласно этому варианту в защитный кожух можно поместить весь автоматический загрузочный механизм 200 или один или более его компонентов (включая станцию загрузки, транспортное средство (например, транспортерную ленту 206) и/или входной порт (не изображен)). В защитном кожухе 260 может иметься окно 262, обеспечивающее доступ к находящемуся внутри него автоматическому загрузочному механизму 200 для загрузки в этот механизм контейнеров 500 для образцов. В качестве опции, защитный кожух 260 может быть снабжен закрывающейся или запирающейся крышкой 264, служащей для защиты автоматического загрузочного механизма 200 и/или установленных в него контейнеров 500. Как показано, крышка 264 может быть откидывающейся; альтернативно, защитный кожух 260 может закрываться каким-либо иным способом. Так, в другом варианте крышка 264 может быть легкой шторкой 266, которая, например, может надвигаться на окно 262. Защитный кожух 260 может иметь также приоритетный загрузочный порт 270 для загрузки контейнеров, имеющих высокий приоритет (например, контейнеров, подлежащих немедленному анализу) и/или неверно считанных контейнеров. В одном варианте контейнер 500 может загружаться в приоритетный порт 270 вручную.
Другой вариант автоматического загрузочного механизма показан на фиг.13-15. Как и ранее описанный автоматический загрузочный механизм, механизм 300, изображенный на фиг.13-15, содержит станцию (зону) 302 загрузки контейнеров, транспортный механизм 304 и вход (входной порт) 306 для полностью автоматизированной загрузки одного или более контейнеров 500 для образцов в систему 100 обнаружения.
Зона 302 загрузки контейнеров находится в легкодоступном месте системы 100 обнаружения, чтобы пользователь мог легко поместить в нее один или более контейнеров 500 для образцов (см., например, фиг.17). Согласно этому варианту контейнеры 500 для образцов загружаются в горизонтальной ориентации, т.е. лежащими на боку, как это показано, например, на фиг.13. Будучи помещенными в зону 302 загрузки, контейнеры 500 для образцов могут быть перемещены транспортным механизмом 304 от зоны 302 загрузки к входу 306, через который контейнеры 500 входят в систему 100 обнаружения, как это будет описано далее. Неожиданно обнаружилось, что автоматический загрузочный механизм 300 по данному варианту способен загружать контейнеры 500 для образцов в систему 100 обнаружения независимо от ориентации контейнера 500 в зоне 302 загрузки (т.е. независимо от того, обращена ли верхняя часть 502 контейнера 500 к системе 100 обнаружения или от нее, - см, например, фиг.14).
В одном варианте станция (зона) 302 загрузки контейнеров содержит загрузочную емкость 303, в которую можно поместить один или более контейнеров 500 для образцов (см., например, фиг.13). Более конкретно, эта емкость 303 может быть рассчитана на нахождение в ней от 1 до 100, до 80 или до 50 контейнеров для образцов. В других конструкциях загрузочная емкость может вместить 100 или более контейнеров 500 для образцов. Автоматический загрузочный механизм 300 по данному варианту может быть снабжен также крышкой (не изображена), посредством которой пользователь (лаборант) может, по желанию, закрывать загрузочную емкость 303 и зону 302 загрузки. Возможны различные конструктивные решения данной крышки.
Как показано на фиг.13-14, загрузочная емкость 303 содержит транспортный механизм 304, например в виде наклонной рампы, направленной вниз, в сторону входа 306, чтобы обеспечить перемещение контейнера 500 для образцов от зоны 302 загрузки к входу 306. Согласно этому варианту наклонная рампа позволяет контейнеру для образцов скатываться или соскальзывать по ней к входу 306. Хотя на чертежах показана именно наклонная рампа, возможны и другие конструкции транспортного механизма 304 для подачи контейнеров для образцов к входу 306. Так, в одной альтернативной конструкции транспортный механизм 304 может содержать транспортерную ленту (не изображена). В соответствии с этим вариантом транспортерная лента может нести один или более контейнеров для образцов, причем она может быть выполнена наклоненной вниз, к входу 306.
Для подачи контейнеров 500 для образцов, поступивших к входу 306, в систему 100 обнаружения может быть применено загрузочное устройство 308 барабанного или аналогичного типа. Барабанное загрузочное устройство 308 снабжено одним или более горизонтально ориентированными пазами 310 для удерживания в них одного или более контейнеров для образцов, причем каждый индивидуальный паз 310 может удерживать единственный контейнер 500 для образцов. В одном варианте загрузочное устройство 308 барабанного типа имеет несколько пазов, например от 1 до 10, до 8, до 6, до 5, до 4 или до 3 пазов для удерживания в них контейнеров 500 для образцов. В другом варианте это устройство может быть выполнено с единственным пазом, в котором может удерживаться единственный контейнер 500 для образцов.
Барабанное загрузочное устройство 308 способно вращаться (по часовой или против часовой стрелки) вокруг горизонтальной оси, с возможностью приема и загрузки индивидуального контейнера 500 для образцов в систему 100 обнаружения. При его использовании загрузочное устройство 308 принимает горизонтально ориентированный контейнер 500 для образцов в одном из нескольких своих горизонтально ориентированных пазов 310 и переносит при своем вращении контейнер 500 к опрокидывателю 330 (наилучшим образом показанному на фиг.16). Для приведения барабанного или аналогичного загрузочного устройства 308 во вращение может быть применено любое подходящее средство, например электродвигатель (не изображен) с приводным ремнем 316 и шкивами 318.
В другом варианте (показанном на фиг.13) автоматический загрузочный механизм 300 может содержать порт 312 загрузки единственного контейнера. Пользователь (лаборант) может использовать данный порт для быстрой (немедленной) загрузки контейнера для образцов, например, требующего немедленного анализа. Как только контейнер будет помещен в порт 312 загрузки единственного контейнера, этот контейнер упадет, под действием силы тяжести, на второй транспортный механизм 314, например в виде наклонной рампы, ведущей вниз, к загрузочному устройству 308 для быстрой (немедленной) автоматизированной загрузки контейнера для образцов в систему 100 обнаружения.
Как показано на фиг.13-16, барабанное или аналогичное загрузочное устройство 308 вращается в вертикальной плоскости (т.е. вокруг горизонтальной оси), перемещая контейнер 500 для образцов от входа 306 к опрокидывателю 330, у которого имеется вертикально ориентированный желоб 332, открытый в своей верхней части. Попав в опрокидыватель 330, контейнеры для образцов разворачиваются (т.е. переходят от горизонтальной ориентации к вертикальной ориентации) с помощью кулачкового механизма и вертикально ориентированного желоба 332. При его использовании кулачковый механизм (не изображен) способен распознавать верхнюю часть и основание контейнера для образцов и проталкивать контейнер 500 для образцов в горизонтальном направлении основанием вперед, так что основание первым проваливается в открытый сверху вертикально ориентированный желоб 332. Таким образом, опрокидыватель 330, позволяющий контейнеру 500 упасть (под действием силы тяжести) основанием вперед по вертикальному желобу 332 в первое позиционирующее гнездо узла 400 позиционирования контейнера (описываемого далее), обеспечивает переориентацию контейнера 500 с приданием ему вертикальной ориентации.
Как показано, например, на фиг.16, у опрокидывателя 330 имеются два скошенных выступа 334, каждый из которых примыкает к соответствующей стороне барабана и выполнен более узким на своем переднем (верхнем) конце и более толстым на заднем (нижнем) конце. Взаимное расположение выступов 334 выбрано таким, что при вращении барабана верхняя часть 502 контейнера 500 будет удерживаться соответствующим выступом, т.е. пробка контейнера будет перемещаться по верхней стороне выступа 334, продолжая лежать на этой стороне. Такое удерживание верхней части 502 контейнера выступом 334 будет продолжаться только короткое время, пока основание контейнера опускается внутри вертикального желоба 332. При этом основание 506 контейнера не будет удерживаться выступом. Напротив, при вращении барабанного или аналогичного загрузочного устройства 308 скошенный выступ 334 будет способствовать проскальзыванию основания 506 контейнера 500 в горизонтальном направлении, от стороны, к которой прилегает основание 506 контейнера 500, к стороне, на которой находится верхняя часть 502 контейнера. Такое выполнение гарантирует, что верхняя часть 502 контейнера с пробкой удерживается на верхней поверхности выступа 334, позволяя основанию 506 контейнера 500 свободно падать по вертикальному желобу 332 в узел 400 позиционирования контейнера. Благодаря наличию выступа 334 на каждой стороне барабанного загрузочного устройства 308 ориентация контейнера 500 во вращающемся барабане не является существенной. Контейнер 500 будет развернут опрокидывателем 330 в правильное положение независимо от того, находится ли верхняя часть 502 контейнера на правой или левой стороне (см. фиг.16) загрузочного устройства 308, поскольку соответствующий выступ 334 будет удерживать пробку или верхнюю часть 502 контейнера при падении его основания 506 по вертикальному желобу 332. В другом варианте вертикальный желоб 332 может иметь более узкую секцию 333, помогающую направить падающий контейнер 500 в узел 400 позиционирования контейнера. Таким образом, в процессе функционирования, когда барабанное загрузочное устройство 308 вращается над открытым сверху вертикально ориентированным желобом 332, пробка или верхняя часть 502 контейнера 500 удерживается у наружного края барабана одним или более выступами 334 (см. фиг.16). Выступы 334 удерживают верхнюю часть 502 контейнера 500 на месте, в то же время позволяя основанию 506 контейнера скатиться или свободно выпасть из барабана загрузочного устройства 308 в вертикально ориентированный желоб 332, придав контейнеру 500 правильную вертикальную ориентацию в процессе его падения, под действием силы тяжести, дном вперед вдоль вертикально ориентированного желоба 332, как описано выше.
Средство управления контейнером (узел позиционирования). Как показано, например, на фиг.13-15, 18 и 25А-25С, система 100 обнаружения может содержать средство управления контейнером (узел 400 позиционирования). Данный узел может быть использован для управления контейнером, в том числе для позиционирования или перемещения контейнера 500 внутри корпуса 102 системы 100 обнаружения между различными операционными участками 404. В одном варианте узел 400 позиционирования, как показано на фиг.13-15, может быть использован совместно с автоматическим загрузочным механизмом 300. В другом варианте узел 400 позиционирования может быть использован совместно с автоматическим загрузочным механизмом, показанным, например, на фиг.18. На фиг.13-15 и 18 узел 400 позиционирования показан схематично и с нарушением масштаба.
Узел 400 позиционирования содержит устройство в форме вращающегося диска, снабженного одним или более позиционирующими гнездами 402, например в количестве от 1 до 10, до 8, до 5, до 4 или до 3 таких гнезд. В одном варианте узел позиционирования содержит параллельные дисковидные пластины (см., например, фиг.25А-25С). Каждое отдельное позиционирующее гнездо 402 способно удерживать единственный контейнер 500 для образцов. В процессе функционирования узел 400 позиционирования вращается (по часовой или против часовой стрелки) в горизонтальной плоскости (т.е. вокруг вертикальной оси), чтобы подводить индивидуальный контейнер 500 к различным операционным участкам 404, перемещая его между этими участками (т.е. от участка к участку). В одном варианте каждый операционный участок 404 способен произвести одно или более измерений или считываний данных с контейнера для получения информации о контейнере, такой как номер партии контейнеров, дата истечения срока годности контейнера, сведения о пациенте, тип образца, уровень заполнения и т.д. В другом варианте один или более операционных участков 404 могут содержать один или более участков выполнения операций с контейнерами, таких как участок захвата контейнера или участок (станцию) переноса контейнера. Например, узел 400 позиционирования может обеспечивать перемещение индивидуального контейнера 500 для образцов к одному или более операционным участкам 404, таким как: (1) участок считывания штрих-кодов; (2) участок сканирования контейнеров; (3) участок получения изображения контейнера; (4) участок взвешивания контейнера; (5) участок захвата контейнера и/или (6) участок переноса контейнера. В другом варианте одно или более указанных измерений и/или считываний могут производиться на одном участке. Например, взвешивание контейнера, сканирование, получение изображения и/или захват контейнера могут иметь место на одном участке. Еще в одном варианте система обнаружения может содержать отдельный участок захвата. Контейнер может захватываться на этом участке транспортным механизмом (как будет описано далее) и переноситься к другим местам внутри системы 100 обнаружения (например, к накопителю и/или взбалтывающему узлу). В следующем варианте система 100 обнаружения может содержать станцию переноса для осуществления переноса контейнера 500 для образцов к другому устройству, например ко второму автоматизированному устройству обнаружения. Согласно этому варианту станция переноса может взаимодействовать с сопрягающим устройством 440 (устройством переноса) в составе системы. Например, как показано на фиг.17-18, сопрягающее устройство 440 может являться транспортерной лентой, позволяющей перенести контейнер для образцов к другому месту внутри системы 100 обнаружения или, в другом варианте, к другому устройству (например, ко второй системе обнаружения типа представленной на фиг.24). Как показано на фиг.14-15, узел 400 позиционирования содержит: (1) входной участок 412; (2) участок 414 считывания штрих-кодов и/или сканирования; (3) участок 416 взвешивания контейнера; (4) участок 418 захвата контейнера и (5) станцию 420 переноса для осуществления переноса контейнера к другому устройству (системе). Узел позиционирования может дополнительно содержать поворотный столик 406 для вращения контейнера с целью облегчить считывание штрих-кодов и/или сканирование контейнера и/или весы 408 для взвешивания контейнера.
Как уже было описано, в процессе функционирования узел 400 позиционирования обеспечивает перемещение контейнера 500 для образцов с целью позиционировать его на требуемом операционном участке 404. В одном варианте эти участки 404 размещены внутри корпуса 102 системы 100 обнаружения. Например, как показано на фиг.13-15 и 18, автоматический загрузочный механизм может поместить контейнер 500 для образцов в позиционирующее гнездо 402 (которое было описано выше), после чего узел 400 позиционирования может начать вращение, чтобы перемещать контейнер для образцов между различными операционными участками в составе системы, например, между участком считывания штрих-кодов, участком сканирования контейнера, участком получения изображения контейнера, участком взвешивания контейнера, участком захвата контейнера и/или участком переноса контейнера.
Средство (механизм) переноса
Как показано, например, на фиг.5-9 В и 17-21, автоматизированная система 100 обнаружения может содержать автоматическое средство (механизм) переноса, служащее (служащий) для переноса контейнера 500 для образцов и/или для управления им внутри системы. Как уже было описано, входной порт 110 принимает контейнеры, например, от транспортерной ленты 206, наиболее наглядно показанной на фиг.1-3. По мере их накопления у входного порта 110, контейнеры вводятся в систему 100 обнаружения, после чего механизм переноса (например, роботизированная рука, снабженная средством захвата контейнера) может захватить или иным образом принять индивидуальный контейнер 500 для образцов и поместить этот контейнер в накопитель (на полку) 600 внутри системы 100 обнаружения, как это будет описано далее. Специалистам известно, что для обеспечения переноса контейнера для образцов к накопителю 600 и для загрузки его в накопитель механизм переноса может использовать видеосистему (например, камеру), запрограммированные координаты и/или средства точного управления движением.
Как показано на фиг.1-3 и 13-15, контейнеры 500 для образцов загружаются и/или вводятся в систему 100 обнаружения с применением автоматического загрузочного механизма 200 (фиг.1-3) или 300 (фиг.13-15). Как показано на чертежах, контейнеры 500 в типичном варианте вводятся в систему 100 обнаружения в вертикальном положении (верхней частью 502 контейнера вверх). В соответствии с одним вариантом контейнеры 500 помещают во множество накопителей 600 и хранят в них с возможностью периодического движения (взбалтывания) с целью усиления роста микроорганизмов в контейнерах. Как показано, например, на фиг.5А и 5 В, приемные элементы (ячейки) 602 накопителей (полок) 600 могут быть ориентированы вдоль горизонтальной оси. Соответственно, в этом варианте автоматический механизм 650 переноса (см., например, фиг.5 В) должен, при переносе контейнера 500 от автоматического загрузочного механизма 200, 300 к приемным элементам (ячейкам) 602 изменить ориентацию контейнера 500 из вертикальной в горизонтальную.
В процессе функционирования системы автоматический механизм 650 переноса (см., например, фиг.5 В) или механизм 700 переноса (см. фиг.20) обеспечивает перенос (перемещение) контейнера 500 для образцов во внутренней камере 620 системы 100 обнаружения. Так, в одном варианте механизм переноса может переносить контейнер 500 для образцов от входного порта 110 к одному из множества накопителей (полок) 600. В другом варианте механизм переноса может забирать контейнер 500 для образцов из позиционирующего гнезда 402 узла 400 позиционирования и переносить контейнер к приемному элементу 602 накопителя (полки) 600. При этом механизм переноса способен поместить контейнер 500 в один из множества приемных элементов 602, имеющихся в одном из множества накопителей 600. В другом варианте механизм переноса может осуществлять извлечение (выемку) положительных и отрицательных контейнеров из накопителей (полок) 600. Соответствующий автоматический выгружающий механизм может обеспечивать извлечение из соответствующего приемного элемента 602 каждого контейнера 500 для образцов сразу же после получения для этого контейнера "положительного" или "отрицательного" показания, чтобы освободить место для другого контейнера, подлежащего загрузке в систему 100 обнаружения, и повысить, тем самым, производительность системы.
В одном варианте механизм переноса может представлять собой роботизированную руку. Для этой цели можно использовать, по существу, любую роботизированную руку, известную из уровня техники. Например, роботизированная рука может быть многокоординатной (например, с возможностью перемещения по 2, 3, 4, 5, или 6 осям). При этом она способна захватывать контейнер 500 для образцов (например, флакон для культивирования крови) и переносить его от входного порта 110 к одному из множества приемных элементов 602, находящемуся в одном из множества накопителей (полок) 600 (снабженных, в качестве опции, взбалтывающим узлом). Далее, чтобы облегчить механизму переноса (роботизированной руке) выполнение необходимых движений, внутренняя камера 620 системы 100 обнаружения может быть снабжена одной или более опорами для роботизированной руки, например одной или более вертикальными опорами и/или одной или более горизонтальными опорами. В случае необходимости механизм переноса (роботизированная рука) будет скользить вверх и вниз или вдоль опоры, чтобы получить доступ к любому из приемных элементов 602 накопителей (полок) 600. Как уже упоминалось, роботизированная рука способна изменять ориентацию контейнера для образцов из вертикальной ориентации (в которой верхняя часть 502 контейнера 500 находится сверху) в горизонтальную (в которой контейнер 500 лежит на боку), например, чтобы облегчить перенос контейнера от станции загрузки и его введение в накопитель и/или взбалтывающий узел.
В одном варианте роботизированная рука является двух- или трехкоординатной роботизированной рукой, способной перемещать контейнер 500 по одной или более горизонтальным осям (например, по осям х и/или z) и, в качестве опции, по вертикальной оси (оси у) в заданное место, например к приемному элементу (ячейке) 602. Согласно этому варианту двухкоординатная рука обеспечивает перемещение по двум осям (например, х и z), а трехкоординатная - по трем осям (х, у, z).
В другом варианте двух- или трехкоординатная роботизированная рука способна дополнительно совершать поворот вокруг одной или более осей, т.е. может поворачивать контейнер 500 для образцов вокруг одной или более осей. Возможность подобных поворотов позволяет роботизированной руке переводить контейнер 500 для образцов из исходной вертикальной ориентации в горизонтальную. Например, роботизированная рука может использовать эту свою способность для поворота контейнера для образцов вокруг горизонтальной оси. Роботизированная рука такого типа будет именоваться далее трех- или четырехкоординатной роботизированной рукой. Например, роботизированная рука, обеспечивающая перемещение по одной горизонтальной оси (х), одной вертикальной оси (у) и вокруг одной оси поворота будет рассматриваться как трехкоординатная роботизированная рука, тогда как роботизированная рука, обеспечивающая перемещение по двум горизонтальным осям (х и z), вертикальной оси (у) и вокруг одной оси поворота, будет рассматриваться как четырехкоординатная роботизированная рука. Аналогично, роботизированная рука, обеспечивающая перемещение по единственной горизонтальной оси (например, оси х), вертикальной оси (у) и вокруг двух осей поворота будет рассматриваться как четырехкоординатная роботизированная рука. Еще в одном варианте роботизированная рука 700 может быть четырех-, пяти- или шестикоординатной роботизированной рукой, обеспечивающей перемещение по осям х, у и z, а также вокруг одной оси поворота (четырехкоординатная рука), вокруг двух осей поворота (пятикоординатная рука) или вокруг двух горизонтальных осей (х и z) и вертикальной оси (у) поворота (шестикоординатная рука).
Еще в одном варианте роботизированная рука может содержать одно или более устройств для проведения измерений, сканирований и/или считывания данных с контейнера 500 для образцов. Так, роботизированная рука может иметь одну или более видеокамер, датчики, сканеры и/или считыватель штрих-кодов. Согласно этому варианту названные компоненты могут облегчить определение положения контейнера, считывание данных (например, штрих-кодов) с этикеток, сканирование контейнера, дистанционное обслуживание системы и/или обнаружение любых возможных утечек из контейнеров внутри системы. В другом конструктивном варианте роботизированная рука может содержать источник ультрафиолетового излучения, чтобы облегчить проведение, при необходимости, автоматического обеззараживания.
Конструктивный вариант механизма переноса показан на фиг.6-8С. Как видно из фиг.6, механизм 650 переноса содержит роботизированную руку, в состав которой входят верхний и нижний горизонтальные несущие рельсы 652А, 652 В, единственный вертикальный несущий рельс 654 и роботизированная головка 656, у которой имеется захватный механизм (не изображен) для захватывания и удерживания контейнера 500 для образцов. Механизм переноса изображен на фиг.6-8С схематично, и некоторые его части, например горизонтальные рельсы 652А, 652 В, вертикальный рельс 654 и роботизированная головка 656 показаны без сохранения масштаба. Специалисту будет легко понять, что длины горизонтальных рельсов 652А, 652 В и вертикального рельса могут быть, в случае необходимости, увеличены или уменьшены. Как показано на чертежах, роботизированная головка 656 установлена на вертикальном несущем рельсе 654, который поддерживается горизонтальными несущими рельсами 652А и 652 В. Как показано на фиг.6, механизм переноса может содержать также одну или более монтажных опор 695, которые служат для установки механизма переноса в систему обнаружения.
В процессе функционирования вертикальный несущий рельс 654 может перемещаться вместе с роботизированной головкой 656 по горизонтальным несущим рельсам 652А и 652 В, т.е. вдоль горизонтальной оси (например, оси х). Для осуществления перемещения вертикального несущего рельса 654 по горизонтальным несущим рельсам 652А и 652В можно использовать, по существу, любое подходящее средство. Показанные на фиг.6 верхний и нижний несущие рельсы 652А и 652В могут иметь верхний и нижний резьбовые валики (не изображены), способные приводить в скользящее движение верхнюю и нижнюю горизонтальные трубки 659А и 659 В соответственно. Кроме того, как показано на фиг.6, верхний и нижний рельсы 652А и 652В могут содержать удлиненные упрочняющие втулки 653А, 653В, которые увеличивают длину верхнего и нижнего несущих рельсов 652А, 652В и охватывают верхний и нижний резьбовые валики (как это описано, например, в патенте США 6467362). В каждой из втулок 653А, 653В выполнена прорезь (например, прорезь 653С), ориентированная по длине верхнего и нижнего несущих рельсов 652А, 652В. Предусмотрены также резьбовые ползунки (не изображены), которые входят в указанные прорези (например, в прорезь 653С) и способны вступать в резьбовое зацепление с резьбовыми валиками (не изображены), заключенными внутри втулок 653А, 653В. При приведении резьбовых валиков верхнего и нижнего несущих рельсов 652А, 652В во вращение посредством первого двигателя 657 неизображенные резьбовые ползунки перемещают, со скольжением, горизонтальные трубки 659А, 659 В по длине верхнего и нижнего несущих рельсов 652А, 652 В, обеспечивая тем самым перемещение роботизированной головки 656 по горизонтальной оси (например, оси х) (см., например, указанный патент США 6467362). Таким образом, первый двигатель 657 обеспечивает приведение во вращение верхнего и нижнего резьбовых валиков (не изображены) и, тем самым, перемещение в горизонтальном направлении вдоль этих валиков верхней и нижней горизонтальных трубок 659А и 659В (каждая из которых снабжена внутренней резьбой, взаимодействующей с резьбой соответствующего валика). В одном конструктивном варианте первый двигатель 657 может приводить во вращение один (например, нижний) резьбовой валик посредством приводного ремня 660 и комплекта шкивов 662, тогда как другой (верхний) резьбовой валик одновременно приводится во вращение непосредственно двигателем 657.
Показанный на фиг.6 вертикальный несущий рельс 654 может быть снабжен вертикальным приводным резьбовым валиком (не изображен), способным приводить в скользящее движение приводной блок 655 и, тем самым, перемещать роботизированную головку 656 вдоль вертикальной оси (оси у). В процессе функционирования второй двигатель 658 может приводить во вращение вертикальный резьбовой валик и, соответственно, перемещать в вертикальном направлении, вдоль этого валика приводной блок 655. В другом варианте, проиллюстрированном на фиг.6-7В, вертикальный резьбовой валик может быть снабжен удлиненной упрочняющей втулкой 654А, которая увеличивает длину вертикального несущего рельса 654 и охватывает вертикальный резьбовой валик (не изображен). Во втулке 654А выполнена прорезь 654В, ориентированная по длине вертикального несущего рельса 654. Предусмотрен также резьбовой ползунок (не изображен), который входит в указанную прорезь и способен вступать в резьбовое зацепление с резьбовым валиком. При приведении двигателем 658 данного резьбового валика во вращение резьбовой ползунок (не изображен) перемещает приводной блок 655 и, следовательно, роботизированную головку 656 вдоль вертикальной оси (оси у) (см., например, указанный патент США 6467362). Приводной блок 655 может быть непосредственно прикреплен к роботизированной головке 656; альтернативно, как показано на фиг.6, он может быть связан с первым поворотным механизмом 664. Приводной блок 655 снабжен внутренней резьбой (не изображена), взаимодействующей с вертикальным резьбовым валиком, приводимым во вращение, чтобы перемещать приводной блок и, тем самым, роботизированную головку 656 в вертикальном направлении, вдоль данного валика.
Механизм 650 переноса может дополнительно содержать один или более поворотных механизмов, обеспечивающих возможность поворота вокруг одной или более осей. Например, как показано на фиг.6, роботизированная головка может быть снабжена первым поворотным механизмом 664 для осуществления поворота вокруг оси у и вторым поворотным механизм 665 для осуществления поворота вокруг оси х. Первый поворотный механизм 664 содержит первую поворотную пластину 667, которая может быть прикреплена к роботизированной головке 656. Первый поворотный механизм 664 содержит также первый двигатель 668 поворота, первую ведущую шестерню 670 и первую кольцевую шестерню 672, которая поворачивает первую поворотную пластину 667 и, следовательно, роботизированную головку 656 вокруг вертикальной оси (оси у). В одном варианте первая ведущая шестерня 670 и первая кольцевая шестерня 672 могут быть снабжены замками (не изображены) или другими стопорными средствами (не изображены). Первая поворотная пластина 667 может быть прикреплена непосредственно к роботизированной головке 656 или, как показано на фиг.6, ко второму поворотному механизму 665. На фиг.6 показано также, что первая поворотная пластина 667 может быть согнута, чтобы облегчить ее прикрепление ко второму поворотному механизму 665. Второй поворотный механизм 665, аналогично первому поворотному механизму 664, содержит вторую поворотную пластину 674, прикрепленную, как это показано на фиг.6, к роботизированной головке 656. Второй поворотный механизм 665 содержит также второй двигатель 678 поворота, вторую ведущую шестерню 680 и вторую кольцевую шестерню 682, обеспечивающие поворот второй поворотной пластины 674, и, следовательно, роботизированной головки 656 вокруг горизонтальной оси (например, оси х). В одном варианте вторая ведущая шестерня 680 и вторая кольцевая шестерня 682 могут быть снабжены замками (не изображены) или другими стопорными средствами (не изображены).
Роботизированная головка 656, лучше всего показанная на фиг.7 В, содержит корпус 684, охватывающий полость 685 для удерживания в ней единственного контейнера 500 для образцов. Роботизированная головка содержит также захватный механизм 686 и приводной механизм 688 для приведения в действие захватного механизма 686, чтобы вводить единственный контейнер 500 для образцов в полость 685 корпуса 684 и выводить его из нее. Захватный механизм 686, как показано на фиг.7В, может содержать подпружиненный зажим 687, способный защелкиваться вокруг верхнего конца контейнера 500 для образцов. После (описываемого выше) переноса контейнера 500 для образцов к накопителю 600 роботизированная головка 656 и с ней захватный механизм 686 могут быть подняты или опущены относительно накопителя 600, чтобы освободить контейнер 500 для образцов. Как показано на фиг.7В, приводной механизм 688 содержит также двигатель 690, направляющую 692, резьбовой валик 694 и снабженный резьбой зажимной блок 696. В процессе функционирования двигатель 690 вращает резьбовой валик 694, перемещая тем самым зажимной блок 696 и, следовательно, захватный механизм 686 вдоль направляющей 692.
Другой конструктивный вариант механизма переноса показан на фиг.9А-9В. Показано, в частности, что автоматический механизм 820 переноса встроен в систему 100 обнаружения, представленную на фиг.9А-9В, чтобы захватывать (извлекать) контейнер 500 у входного порта 110 и переносить этот контейнер к заданному приемному элементу 802 верхнего или нижнего барабанного накопителя 800 (описываемого далее). Автоматический механизм 820 переноса в этом варианте способен также переносить отрицательный контейнер 500 к зоне для отрицательных контейнеров и сбрасывать или другим образом помещать контейнер 500 в сборник 146, или переносить положительный контейнер в зону для положительных контейнеров (например, в зону 130 - см. фиг.1). Чтобы обеспечить такие перемещения, механизм 820 переноса содержит роботизированную головку 824, которая может быть снабжена захватным механизмом 826 для захвата и удерживания контейнера 500 и поворотным несущим стержнем 828, проходящим по ширине внутренней камеры 850 системы 100. Видно, что роботизированная головка 824 установлена на поворотном несущем стержне 828, например, прикреплена к нему. В качестве захватного механизма может быть использован любой известный механизм такого типа. В одном варианте могут использоваться захватный механизм и приводной механизм, описанные выше со ссылкой на фиг.6-8С. Роботизированная головка 824 может устанавливаться в любое положение по длине несущего стержня 828. В процессе функционирования несущий стержень 828 может поворачиваться вокруг своей продольной оси, чтобы ориентировать роботизированную головку 824 в направлении верхнего или нижнего цилиндрических (барабанных) накопителей 800А, 800В.
В одном варианте роботизированная головка 824 способна захватывать контейнер 500 у входного порта 110 и загружать его (верхней частью 502 вперед) в приемный элемент (ячейку) 802 накопителя 800А или 800В. При такой ориентации основание 506 контейнера 500 будет обращено к блоку 810 обнаружения, который может считывать информацию с датчика 514, установленного на основании контейнера 500, чтобы детектировать рост микробов (микроорганизмов) в контейнере.
Другое выполнение механизма переноса показано на фиг.17-21В. В этом варианте роботизированная рука 700 содержит одну или более горизонтальных несущих конструкций 702, одну или более вертикальных несущих конструкций 704 и роботизированную головку 710, содержащую одно или более устройств (например, захватный механизм) для захватывания и/или удерживания контейнера 500 для образцов. Роботизированная головка 710 может поддерживаться одной из горизонтальных и/или вертикальных несущих конструкций или быть прикреплена к ней. Так, в одном варианте, показанном на фиг.17-21В, роботизированная рука 700 содержит нижнюю горизонтальную несущую конструкцию 702В и единственную вертикальную несущую конструкцию 704. Хотя это не изображено, специалисту будет ясна возможность использования также верхней горизонтальной несущей конструкции или иного аналогичного средства, чтобы дополнительно поддерживать или направлять вертикальную несущую конструкцию. По существу, любое подходящее известное средство может быть использовано, чтобы перемещать роботизированную головку 710 вверх и вниз по вертикальной несущей конструкции 704 (как это показано стрелкой 726 на фиг.18) и перемещать вертикальную несущую конструкцию (вертикальный несущий рельс) 704 вперед и назад вдоль горизонтальной несущей конструкции 702В (как это показано стрелкой 736 на фиг.20). В частности, как показано на фиг.20, роботизированная рука 700 может содержать вертикальный приводной двигатель 720 и вертикальный приводной ремень 722, которые обеспечивают перемещение роботизированной головки 710 вверх и вниз (по стрелке 726) вдоль вертикального несущего рельса 704, чтобы перемещать контейнер 500 вверх и вниз, т.е. по вертикальной оси (у). Вертикальная несущая конструкция 704 может содержать вертикальный направляющий рельс 728 и опорный блок 708 роботизированной головки, как это показано на фиг.20. В результате вертикальная несущая конструкция 704, вертикальный направляющий рельс 728, вертикальный приводной двигатель 720 и вертикальный приводной ремень 722 обеспечивают роботизированной руке 700 возможность перемещать опорный блок 708 и, следовательно, роботизированную головку 710 с контейнером 500 для образцов вдоль оси у. Аналогично, как показано на фиг.20, роботизированная рука 700 может содержать также первый горизонтальный приводной двигатель 730, первый горизонтальный приводной ремень 732 и горизонтальный направляющий рельс 738, которые обеспечивают возможность перемещения вертикальной несущей конструкции 704 вперед и назад (т.е. слева направо и/или справа налево) вдоль горизонтального направляющего рельса 738, т.е. вдоль первой горизонтальной оси (х) внутри корпуса 102 системы 100 обнаружения (по стрелке 736). Таким образом, горизонтальная несущая конструкция (горизонтальные несущие конструкции) 702 В, первый горизонтальный приводной двигатель 730, первый горизонтальный приводной ремень 732 и горизонтальный направляющий рельс 738 обеспечивают роботизированной руке 700 возможность переносить контейнер 500 для образцов вдоль оси х. Авторы обнаружили, что применение вертикальной опоры, подвижной вдоль горизонтальной оси, способствует повышению производительности системы обнаружения, поскольку роботизированная рука оказывается способной перемещаться по большему пространству внутри системы. Кроме того, авторы считают, что роботизированная рука с подвижной вертикальной опорой может иметь повышенную надежность.
Как наиболее наглядно показано на фиг.17-21В, автоматический механизм 700 переноса (роботизированная рука) может содержать также горизонтальные салазки 706 и поворачивающую плиту 750. Как показано, например, на фиг.17-20, горизонтальные салазки 706 несут роботизированную головку 710 и захватный механизм 712. При этом горизонтальные салазки 706 и роботизированная головка 710 могут поддерживаться опорным блоком 708 роботизированной головки и вертикальным направляющим рельсом 728 (описанными выше) или быть связаны с этими компонентами каким-то иным образом. Согласно этому варианту горизонтальные салазки 706 можно, с помощью опорного блока 708 роботизированной головки и вертикального направляющего рельса 728, перемещать вверх и вниз (см. стрелку 726 на фиг.18) вдоль вертикальной оси у, чтобы обеспечить перемещение роботизированной головки 710 и/или контейнера 500 для образцов вверх и вниз (т.е. по вертикальной оси у) внутри корпуса 102 системы 100 обнаружения. Как показано на фиг.21А-21В, горизонтальные салазки 706 могут содержать поворачивающую плиту 750, снабженную направляющим рельсом 752, прорезью 754 и кулачком 756. Эти компоненты обеспечивают роботизированной головке 710 возможность скользящего перемещения вдоль горизонтальных салазок 706 вперед-назад (как показано стрелкой 746 на фиг.18), чтобы переносить контейнер 500 вдоль второй горизонтальной оси (оси z). Согласно этому варианту для осуществления данного перемещения могут быть использованы второй горизонтальный приводной двигатель (двигатель горизонтальных салазок) 760 и соответствующий приводной ремень (не изображен). Таким образом, горизонтальные салазки 706, двигатель и приводной ремень горизонтальных салазок обеспечивают возможность роботизированной головке 710 переносить контейнер 500 для образцов вдоль оси z. Как это известно из уровня техники, для индикации положения роботизированной головки 710 на горизонтальных салазках 706 можно использовать один или более датчиков (например, датчик 764 - см. фиг.21А).
Как показано на фиг.21А-21В, при движении роботизированной головки 710 вдоль горизонтальных салазок 706 поворачивающая плита 750, направляющий рельс 752 поворотной плиты, прорезь 754 и кулачок 756 обеспечивают поворот каретки 758 вокруг горизонтальной оси (оси z) и, в результате, поворачивают роботизированную головку 710 с переходом из горизонтальной ориентации (см. фиг.21А) в вертикальную ориентацию (см. фиг.21В) или наоборот. Как уже упоминалось, перевод контейнера 500 из вертикальной (исходной) ориентации в горизонтальную ориентацию может быть необходим для того, чтобы поместить его в горизонтально ориентированный приемный элемент (ячейку) 602 накопителя (полки) 600. Соответственно, поворачивающая плита 750, прорезь 754 и поворотная каретка 758 обеспечивают роботизированной головке 710 возможность изменить ориентацию контейнера 500 для образцов из исходной вертикальной (см., например, фиг.18) в горизонтальную (см., например, фиг.21А). Это позволяет переместить контейнер 500 для образцов из автоматического загрузочного механизма (например, механизма 200 - см. фиг.18) в ячейку накопителя 600 (например, в ячейку 602 - см. фиг.18). Как показано на фиг.20, автоматический механизм переноса может также содержать один или более блоков 782 управления кабелями в системе 100 обнаружения и плату 784 для управления роботизированным механизмом переноса. Еще в одном варианте роботизированная рука 700 может содержать тормозной механизм 786, способный остановить вертикальный приводной ремень 722 и тем самым предотвратить его падение на дно устройства (например, в случае перебоев электропитания).
Роботизированная рука 700 может дополнительно содержать захватный механизм 712, чтобы захватывать и удерживать контейнер 500 для образцов. Как показано, например, на фиг.21А и 21В, захватный механизм может содержать два или более захватывающих пальцев 714. Захватный механизм 712 может, кроме того, содержать линейный приводной компонент 716 и двигатель 718 для этого компонента, который может приводить в действие линейный приводной компонент, чтобы разжимать и сжимать захватывающие пальцы 714. В процессе функционирования, как это понятно специалистам, двигатель 718 может приводить в действие приводной компонент 716 захватного механизма 712, чтобы обеспечить перемещение захватывающих пальцев 714. Так, при движении приводного компонента в первом направлении (например, к двигателю) пальцы сжимаются и захватывают контейнер 500. Наоборот, чтобы разжать захватывающие пальцы и освободить контейнер 500, приводной компонент может двигаться во втором направлении (например, от двигателя). Авторы неожиданно обнаружили, что движение одного или более захватывающих пальцев 714 позволяет захватному механизму 712 работать (т.е. схватывать и/или удерживать большое количество различных контейнеров 500 для образцов). Кроме того, было обнаружено, что при использовании захватывающих пальцев 714 с протяженностью от примерно четверти до примерно половины длины контейнера 500 для образцов эти пальцы способны схватывать и удерживать контейнеры многих известных типов (например, флаконы для культивирования крови с длинным горлом).
Как будет описано далее, автоматический механизм переноса (роботизированная рука 700) может находиться под управлением контроллера системы (не изображен), запрограммированного для управления контейнером 500 для образцов в системе 100 обнаружения (например, включая его схватывание, перенос, размещение и/или удаление).
Еще в одном рассматриваемом далее варианте механизм 700 переноса может применяться для автоматизированной выгрузки "положительных" и "отрицательных" контейнеров 500 для образцов.
Средство размещения с опционным средством взбалтывания
Средство размещения в составе системы 100 обнаружения может иметь различные конфигурации для обращения с множеством индивидуальных контейнеров 500 для образцов, чтобы обеспечить возможность одновременного тестирования большого количества (например, 200 или 400) контейнеров, зависящего от конкретных используемых накопителей. Средство размещения может быть использовано для хранения, взбалтывания (колебательного движения) и/или инкубации контейнера 500 для образцов. Одна из возможных конфигураций показана на фиг.5А-5В, а другие - на фиг.9А и 9В. Эти конфигурации приводятся в качестве неограничивающих примеров. Специалисту будет понятно, что возможны также и другие конфигурации.
Как показано на фиг.5А-5В и 17-20, одна возможная конфигурация использует множество накопителей 600 для контейнеров, которые установлены один на другой и в каждом из которых имеется множество приемных элементов (ячеек) 602 для контейнеров, каждый (каждая) из которых служит для помещения в него (в нее) индивидуального контейнера 500 для образцов. Согласно этому варианту можно использовать 2 или более расположенных друг над другом накопителей 600, например от 2 до 40, до 30, до 20 или до 15 таких накопителей (полок). Как показано на фиг.5А-5 В и 17-20, в представленной конфигурации система 100 обнаружения содержит внутреннюю камеру 620 с контролируемой атмосферой, состоящую из верхней и нижней внутренних камер 622, 624 и содержащую множество установленных одна на другую полок 600 (например, как показано на фиг.5А-5В, 15 таких полок), в каждой из которых имеется множество индивидуальных приемных элементов (ячеек) 602. Каждый индивидуальный накопитель (полка) 600 может содержать два или более приемных элементов, например от 2 до 40, до 30 или до 20 приемных элементов в форме ячеек 602. В одном варианте, показанном на фиг.5А-5В, приемные элементы (ячейки) 602 могут быть расположены двумя взаимно смещенными по вертикали рядами с согласованным расположением приемных элементов 602. В альтернативном варианте приемные элементы 602 могут быть взаимно смещены по горизонтали, чтобы уменьшить высоту каждого индивидуального накопителя 600 (см., например, фиг.20) и, тем самым, увеличить общее количество накопителей (полок) 600 при заданном вертикальном размере инкубационной камеры 620. Как показано в примере на фиг.5А-5В, система обнаружения содержит 15 накопителей 600, каждый из которых содержит два ряда по 10 индивидуальных приемных элементов (ячеек) 602, что соответствует общей емкости варианта системы по фиг.5А-5В, равной 300 контейнеров. В другой возможной конфигурации устройство (система) обнаружения может содержать 16 смещенных по вертикали полок, каждая из которых содержит 25 приемных элементов (ячеек), что соответствует общей емкости (вместительности), равной 400 контейнерам.
Положение (адрес) каждого индивидуального приемного элемента (ячейки) 602 определяется конкретными координатами Х и Y, задающими соответственно горизонтальное и вертикальное положение данного приемного элемента 602. Индивидуальные ячейки 602 доступны для механизма переноса, такого как, например, роботизированная рука, описанная выше со ссылками на фиг.17-21. Как показано на фиг.17-21, автоматический механизм 700 переноса способен подводить роботизированную головку 710 и, следовательно, контейнер 500 для образцов в положение, заданное конкретными значениями X, Y на полке 600, и помещать контейнер 500 на эту полку. В процессе функционирования автоматический механизм 700 переноса может схватывать контейнер 500 для образцов у входного порта 110 или на участке 418 захвата в узле 400 позиционирования, переносить контейнер 500, определенный как положительный в отношении микробного роста, к зоне 130 для положительных контейнеров и/или переносить контейнер 500, определенный как отрицательный в отношении микробного роста, к сборнику 146 отрицательных контейнеров.
В одном варианте весь накопитель (вся полка) 600 может приводиться в колебательное движение посредством взбалтывающего узла (не изображен), чтобы инициировать или ускорить рост микроорганизмов. Взбалтывающий узел может представлять собой любое подходящее средство (любой подходящий механизм), обеспечивающее (обеспечивающий) приведение накопителей (полок) 600 в периодическое (колебательное) движение (например, качание вперед-назад). Так, в конкретном варианте для взбалтывания жидкости в контейнерах накопители (полки) 600 могут приводиться в периодическое качательное движение вперед-назад из, по существу, вертикального положения в, по существу, горизонтальное положение. Еще в одном варианте для взбалтывания жидкости в контейнерах накопители (полки) 600 могут приводиться в периодическое качательное движение вперед-назад из, по существу, горизонтального положения в положение, наклоненное относительно этого положения на 10°, 15°, 30°, 45° или 60°. В одном варианте предпочтительным может являться качательное движение из горизонтального положения в положение, наклоненное относительно этого положения на 10°-15°. Еще в одном варианте накопители 600 для взбалтывания жидкости в контейнерах могут приводиться в возвратно-поступательное движение вперед-назад. В этом варианте накопители (полки) 600 и приемные элементы (ячейки) 602 могут быть ориентированы вертикально или, альтернативно, горизонтально. Авторы обнаружили, что линейное (возвратно-поступательное) движение в горизонтальной плоскости накопителей 600 и, соответственно, приемных элементов (ячеек) 602 и контейнеров 500 для образцов, находящихся в горизонтальной ориентации, может обеспечить существенное взбалтывание при относительно минимальных энергозатратах. Поэтому в некоторых вариантах горизонтальная ориентация накопителей (полок) 600 в сочетании с линейным (горизонтальным) движением взбалтывания может быть предпочтительной. Рассматриваются и другие средства периодического перемещения накопителей (полок) 600 и, соответственно, взбалтывания жидкости в контейнерах 500 для образцов, которые будут очевидны для специалистов. При этом для обеспечения требуемого взбалтывания жидкости в контейнерах горизонтальные возвратно-поступательные перемещения могут повторяться в желательном режиме (например, с различными периодами и/или скоростями).
Одна из возможных конструкций взбалтывающего узла представлена на фиг.26. Видно, что взбалтывающий узел 626 содержит один или более накопителей 600, содержащих множество ячеек 602 для удерживания множества контейнеров 500 для образцов. Узел 626 содержит также двигатель 628 взбалтывания, эксцентрик 630, первое звено 632, второе (промежуточное) звено 634 и несущую раму 636 для полок. В процессе функционирования двигатель 628 взбалтывания приводит во вращение эксцентрик 630, в результате чего первое звено 632 приходит в эксцентрическое движение. Движение первого звена 632 преобразуется в линейное возвратно-поступательное движение промежуточного звена (шатуна) 634 (как это показано стрелкой 635). Возвратно-поступательное движение промежуточного звена 634 приводит раму 636 для полок в возвратно-качательное движение, сообщая тем самым возвратно-качательное движение взбалтывания накопителям 600 (как это показано стрелкой 638 на фиг.17, 18, 26).
В другом конструктивном варианте, показанном на фиг.9А и 9В, система 100 обнаружения может содержать верхний и нижний накопители 800А и 800В в форме цилиндрических (барабанных) конструкций, содержащих множество приемных элементов (ячеек) 802 для приема индивидуальных контейнеров 500. В этом варианте, чтобы обеспечить взбалтывание жидкости в контейнерах 500, каждый цилиндрический (барабанный) накопитель 800А, 800В вращается вокруг горизонтальной оси. Согласно этому варианту в каждом барабанном накопителе может иметься от примерно 8 до примерно 20 рядов (например, от 8 до 20 или до 18 или от 10 до 16 рядов), в каждом из которых имеется от примерно 8 до примерно 20 приемных элементов (ячеек) 802 (например, от 8 до 20 или 18 или от 10 до 16 приемных элементов 802).
Как уже было описано, автоматический механизм 820 переноса включен в систему 100 обнаружения по фиг.9А-9В, чтобы забирать контейнер 500 от входного порта 110, переносить его к заданному приемному элементу (ячейке) 802 верхнего или нижнего барабанного накопителя 800 и вводить контейнер 500 в этот элемент. Автоматический механизм 820 переноса в данном варианте способен обеспечить также перенос отрицательного контейнера 500 в сборник 146 подобных контейнеров или перенос положительного контейнера в зону 130 для положительных контейнеров (см., например, фиг.1). При этом, как было описано, забирать контейнеры 500 от входного порта 110 и загружать их, верхней частью 502 вперед, в ячейки 802 барабанных накопителей 800А, 800В может роботизированная головка 824 (см. фиг.9В). При указанной ориентации контейнера 500 его основание 506 обращено к блоку 810 обнаружения, который может считывать информацию с датчика 514, установленного на основании контейнера 500, чтобы детектировать рост микробов (микроорганизмов) в контейнере.
Как уже было описано, роботизированная рука может извлекать положительные и отрицательные контейнеры и переносить их в другие места внутри системы. Например, контейнер, определенный в отношении микробного роста как положительный, может быть извлечен и перенесен транспортным механизмом в зону для положительных контейнеров, т.е. к выходному порту, откуда его может легко забрать пользователь (лаборант). Аналогично, контейнер, по истечении заданного времени определенный в отношении микробного роста как отрицательный, может быть перенесен транспортным механизмом в сборник отрицательных контейнеров для их утилизации.
В одном варианте накопитель (полка) 600 может дополнительно содержать удерживающее приспособление, служащее, чтобы удерживать контейнеры 500 для образцов внутри приемных элементов (ячеек) 602 полок 600. Как показано на фиг.27А-27С, удерживающее приспособление 860 содержит скошенную винтовую пружину 864 и v-образную удерживающую пластину 862. Согласно этому варианту, использующему винтовую пружину 864, многочисленные точки контакта витков пружины воздействуют на поверхность контейнера, удерживая контейнер (флакон) в ячейке 602 полки. Витки пружины 864 расположены под углом к оси контейнера, как это показано на фиг.27С (на которой, чтобы сделать наглядным наличие угла, образованного витками с осью контейнера, витки представлены преувеличенно растянутыми, тогда как обычно имеет место плотное расположение витков пружины 864). Угол между витками пружины 864 и осью контейнера может составлять, например, от 10° до 50°, до 20°, до 40° или до 30° (см. фиг.27С). V-образная удерживающая пластина 862 способна удерживать пружину 864 в контакте с накопителем 600. Как показано на чертежах, чтобы удерживать скошенную винтовую пружину 864, удерживающая пластина 862 образует v-образную канавку. Данная пластина предотвращает любое движение пружины 864 относительно контейнера 500 и/или накопителя 600. Таким образом, в отличие от традиционных пружин растяжения (например, плоской листовой пружины), которые, как правило, контактируют с контейнером в единственной точке, винтовая пружина 864 может жестко фиксироваться v-образной канавкой пластины 862 так, чтобы витки пружины отклонялись под действием давления. Применение подобной пружины позволяет распределить нагрузку, обеспечивая равномерное отклонение.
Как показано, например, на фиг.27А и 27С, приемные элементы (ячейки) 602 могут быть дополнительно снабжены одним или более ребрами 868. В одном конструктивном варианте, представленном на фиг.27С, два или три таких ребра 868 расположены непосредственно напротив пружины 864. Эти два ребра 868 образуют канавку, обеспечивающую центрирование контейнера 500 внутри ячейки 602 относительно продольной оси ячейки (не изображена). В процессе функционирования скошенная винтовая пружина 864 прикладывает усилие к стенке контейнера 500, надежно удерживая его внутри ячейки 602 полки 600. В одном варианте угловое расстояние между двумя ребрами 868, противолежащими винтовой пружине 864, может составлять от примерно 30° до примерно 90° или от примерно 40° до примерно 80°. В другом варианте это угловое расстояние между ребрами 868 может составлять около 60°. На фиг.27С показано также, что накопитель может содержать первый ряд и второй ряд параллельных приемных элементов, внутри которых может удерживаться множество контейнеров. В этом случае накопитель содержит также первую винтовую пружину, примыкающую к первому ряду, и вторую винтовую пружину, примыкающую ко второму ряду, причем каждая из названных пружин способна удерживать множество контейнеров внутри указанных ячеек.
Использование винтовой пружины 864, v-образной удерживающей пластины 862 и двух ребер 868, противолежащих указанной пружине, обеспечивает постоянное и надежное удерживание флакона в одном и том же положении внутри ячейки 602 независимо от любых боковых нагрузок, прикладываемых в результате взбалтывания или ввода контейнера в ячейку. Применение винтовой пружины 864 и v-образной пластины 862 позволяет также применять ячейки 602 и накопители 600 уменьшенной длины. Уменьшение глубины ячеек 602 позволяет одинаково эффективно удерживать контейнеры различных конструкций и с различными длинами, а также увеличить площадь поверхности контейнера, открытую для обдувания, в процессе инкубации, потоком воздуха, формируемого в системе.
Как будет понятно специалистам, возможны и другие конструкции или конфигурации накопителей 600 и/или взбалтывающего узла, которые не выходят за границы настоящего изобретения.
Блок обнаружения
Различные возможные конфигурации системы 100 обнаружения, как показано на фиг.1-6, 9А-9В, 21А-21В и 27, могут предусматривать применение сходных средств обнаружения. При этом для мониторинга и/или опрашивания контейнера для образцов с целью обнаружения микробного роста могут быть использованы, по существу, любые пригодные для этого средства, известные из уровня техники. Как уже упоминалось, мониторинг контейнера 500 для образцов с целью обнаружения микробного роста может производиться, в процессе инкубации контейнеров 500 в системе 100 обнаружения, непрерывно или периодически. Так, в одном варианте блок 810 обнаружения (см. фиг.9В) считывает информацию с датчика 514, помещенного на основание 506 контейнера 500. Применимы различные технологии детектирования, известные из уровня техники. В одном возможном варианте блок обнаружения производит колориметрические измерения, как это описано в уже упоминавшихся патентах США 4945060; 5094955; 5162229; 5164796; 5217876; 5795773 и 5856175. Как объясняется в данных патентах, контейнер определяется как положительный в зависимости от результатов колориметрических измерений. Альтернативно, обнаружение микробного роста может проводиться измерением собственной флуоресценции микроорганизма и/или обнаружением изменений в рассеивающих свойствах среды (как это описано, например, в американской патентной заявке №12/460,607, поданной заявителем настоящего изобретения 22.07.2009 и озаглавленной "Method and System for Detection and/or Characterization of a Biological Particle in a Sample."). Еще в одном варианте обнаружение микробного роста может производиться методом обнаружения в жидкости или в объеме над ней летучих органических соединений (продуктов). При этом в системе обнаружения могут использоваться различные конструктивные варианты блока обнаружения. Например, с каждой полкой (накопителем) можно связать единственный блок обнаружения или множество таких блоков.
Внутренняя камера с контролируемой атмосферой
Как было описано выше, система 100 обнаружения может содержать внутреннюю (инкубационную) камеру с контролируемой атмосферой для поддержания в ней условий, способствующих росту любых микробных агентов (например, микроорганизмов), которые могут присутствовать в контейнере 500 для образцов, и/или ускоряющих этот рост. Согласно этому варианту, чтобы поддерживать постоянную температуру во внутренней камере, система 100 обнаружения может содержать нагревательный элемент или воздуходувку для подачи горячего воздуха. Так, в одном варианте нагревательный элемент или воздуходувка способны создать и/или поддерживать во внутренней камере повышенную температуру (т.е. температуру, превышающую комнатную температуру). В другом варианте система 100 обнаружения содержит охлаждающий элемент или воздуходувку для подачи холодного воздуха (не изображены), чтобы поддерживать во внутренней камере температуру ниже комнатной температуры. Согласно этому варианту внутренняя (инкубационная) камера будет находиться при температуре от примерно 18°С до примерно 45°С. В одном варианте внутренняя камера может представлять собой инкубационную камеру, в которой поддерживается температура от примерно 35°С до примерно 40°С, предпочтительно около 37°С. В другом варианте температура внутренней камеры может поддерживаться ниже комнатной температуры, например от примерно 18°С до примерно 25°С, предпочтительно около 22,5°С. При этом возможность обеспечения более стабильных температурных условий, чтобы способствовать микробному росту в контейнере 500 для образцов и/или ускорить этот рост, является важным достоинством системы. Эта возможность обеспечивается тем, что система 100 обнаружения является закрытой системой, в которой автоматизированная загрузка, перенос и выгрузка контейнеров 500 для образцов производится без необходимости открывать какую-либо панель обеспечения доступа, что могло бы привести к нарушению температуры инкубации (от 30° до 40°С, предпочтительно около 37°С) во внутренней камере 620.
Система 100 обнаружения может использовать, по существу, любые известные средства, пригодные для поддержания в камере контролируемой атмосферы, способствующей микробному росту и/или ускоряющей его. Например, для поддержания внутреннего объема системы 100 обнаружения при температуре, требуемой для инкубации жидкости в контейнерах и инициирования/ускорения микробного роста, можно применить один или более нагревательных элементов, воздуходувку, вентиляторы и/или другое известное оборудование.
В типичном варианте для поддержания постоянной температуры во внутренней камере 620 системы 100 обнаружения используются один или более нагревательных элементов или воздуходувок, работающих под управлением контроллера системы. Как это известно специалистам, нагревательный элемент или воздуходувку можно установить в различных местах во внутренней камере. Например, как показано на фиг.5 и 6, один или более нагревательных элементов или воздуходувок 640 можно установить на основании, несущем накопители (полки) 600, чтобы теплый воздух мог проходить через множество накопителей. Аналогичный компонент (компоненты) 840 можно использовать и в вариантах по фиг.9А и 9В. Подробности осуществления инкубации не являются критичными для изобретения и хорошо известны специалистам, поэтому в данном описании они опускаются.
Контроллер и пользовательский интерфейс
Для управления различными операциями и механизмами система 100 обнаружения содержит контроллер, например компьютеризированный контроллер (не изображен), и встроенное программное обеспечение. И контроллер системы, и встроенное программное обеспечение для управления функционированием различных механизмов могут быть любыми подходящими и известными из уровня техники средствами. В одном варианте контроллер и встроенное программное обеспечение выполняют все операции, необходимые для управления различными механизмами системы, обеспечивающими: автоматизированную загрузку, автоматизированный перенос, автоматизированное обнаружение и/или автоматизированную выгрузку контейнера для образцов из системы. Контроллер и его программное обеспечение обеспечивают также идентификацию и отслеживание контейнера для образцов внутри системы.
Система 100 обнаружения может также содержать пользовательский интерфейс 150 и ассоциированную с ним компьютерную систему управления для работы с механизмом загрузки, транспортным механизмом, накопителями, оборудованием для взбалтывания, инкубации и приема результатов измерений от блоков обнаружения. Детали такого управления некритичны и могут варьировать в широких пределах. Когда контейнер определяется как положительный, пользователю может быть выдан сигнал через пользовательский интерфейс 150 и/или путем активации индикатора 190 положительного контейнера (см., например, фиг.1), например, включением источника света на индикаторе. Как уже упоминалось, при определении контейнера как положительного он может быть автоматически перенесен в зону 130 для положительных контейнеров, показанную, например, на фиг.1-3, 10-11 и 22-24, откуда он может быть забран пользователем.
Пользовательский интерфейс 150 может также сообщать оператору или лаборанту информацию о статусе контейнеров, загруженных в систему обнаружения. Пользовательский интерфейс может характеризоваться наличием одного или более из следующих признаков: (1) сенсорный дисплей (тачскрин); (2) клавиатура на тачскрине;
(3) отображение статуса системы; (4) оповещение о положительном определении; (5) коммуникация с другими системами: с системой дистанционного управления, мониторинга и сбора данных (DMS), лабораторно-информационной системой (LIS), системой BCES и другими системами и/или устройствами обнаружения или идентификации; (6) отображение статуса контейнера (флакона); (7) поиск контейнеров;
(8) визуальный и звуковой индикатор положительного флакона; (9) вход USB (для резервного копирования и внешнего доступа); (10) дистанционная передача уведомлений о положительных контейнерах, статуса системы и сообщений об ошибках. В другом варианте, представленном на фиг.22-23, может иметься обновляемый экран 152 статуса для выдачи статусной информации о загруженных в систему обнаружения контейнерах, включающей, например: (1) данные о положении контейнера внутри системы; (2) информацию о контейнере, такую как сведения о пациенте, тип образца, время ввода и др.; (3) оповещение об определении контейнера как положительного или отрицательного; (4) температуру внутренней камеры; (5) сообщение о заполнении сборника отрицательных контейнеров и необходимости его опорожнения.
Конкретный внешний вид и конструкция системы обнаружения,
пользовательского интерфейса 150 и/или экрана 152 статуса не рассматриваются как важные и могут варьировать в широких пределах. Выполнение согласно фиг.1-2 представляет только один возможный неограничивающий вариант, приведенный только в иллюстративных целях. Другой вариант, приведенный на фиг.22-23, также является только иллюстративным, но не ограничивающим.
Автоматизированная выгрузка
Система 100 обнаружения может также обеспечивать автоматизированную выгрузку положительных и отрицательных контейнеров 500 для образцов. Как было описано выше, "положительными" именуются контейнеры, в которых присутствует микробный агент, а "отрицательными" - контейнеры, в которых по истечении заданного периода роста микроорганизмов не обнаружено.
Как только контейнер определен как положительный, система обнаружения уведомляет оператора об этом результате через индикатор 190 (например, в форме визуального сигнала) и/или посредством выдачи уведомления через пользовательский интерфейс 150. Как показано на фиг.1-3 и 5А-5В, положительные флаконы могут автоматически извлекаться посредством механизма 650 переноса (например, роботизированной руки) и помещаться в заданную зону для положительных контейнеров, например в выходной порт 130. Данная зона для положительных контейнеров находится вне корпуса устройства, чтобы обеспечить пользователю легкий доступ к контейнеру. В одном варианте контейнер будет помещаться в указанную зону в вертикальной ориентации. В одной конструктивной конфигурации автоматизированная выгрузка положительного контейнера производится с использованием подающей трубки (не изображена), внутри которой положительный контейнер (например, положительный флакон для культивирования крови) может перемещаться и подаваться к зоне для положительных контейнеров (к выходному порту 130). В соответствии с этой конструктивной особенностью механизм переноса (например, роботизированная рука) сбрасывает или иным образом помещает положительный контейнер для образцов во входной (верхний) конец подающей трубки, так что контейнер будет перемещаться внутри нее под действием силы тяжести к зоне для положительных контейнеров (к выходному порту 130). В одном варианте подающая трубка (не изображена) может вмещать один или более положительных контейнеров для образцов, например от 1 до 5, до 4 или до 3 "положительных" контейнеров. В другом варианте, проиллюстрированном на фиг.22-24, зону для положительных контейнеров (выходной порт 130) можно снабдить гнездами для одного или более положительных контейнеров для образцов, например двумя такими гнездами для раздельного удерживания двух положительных контейнеров.
В другом варианте системы 100 обнаружения, отрицательные контейнеры могут переноситься механизмом 700 переноса (например, роботизированной рукой) из накопителя (полки) 600 в зону для отрицательных контейнеров, например в сборник 146. В типичном варианте роботизированная рука будет освобождать такие контейнеры, которые будут падать в сборник 146; однако, возможны и другие варианты, очевидные для специалистов. В одном конструктивном варианте автоматизированная выгрузка отрицательного контейнера будет производиться с использованием подающей трубки (не изображена), внутри которой отрицательный контейнер (например, отрицательный флакон для культивирования крови) может перемещаться и подаваться к зоне для отрицательных контейнеров (к сборнику 146). В соответствии с этой конструктивной особенностью механизм переноса (например, роботизированная рука) сбрасывает или иным образом помещает отрицательный контейнер для образцов во входной (верхний) конец подающей трубки, так что контейнер будет перемещаться внутри нее под действием силы тяжести к зоне для отрицательных контейнеров (к сборнику 146). Система 100 обнаружения может также иметь панель 140 доступа или ящик 142, который открывается, чтобы предоставить пользователю доступ к зоне для отрицательных контейнеров (к сборнику 146 отрицательных контейнеров). В другом варианте сборник 146 отрицательных контейнеров может быть снабжен весами для взвешивания этого сборника. Как должно быть понятно специалистам, осуществляя мониторинг веса сборника 146, контроллер системы (не изображен) может определять степень заполнения этого сборника и, если это представляется желательным, выдавать сигнал (например, на пользовательский интерфейс 150), указывающий пользователю (лаборанту), что сборник 146 отрицательных контейнеров заполнен и требует опорожнения.
Автоматизированная лабораторная система
Как уже отмечалось, система 100 обнаружения согласно изобретению может быть реализована во многих различных конфигурациях. Одна из этих конфигураций, особенно эффективная в применениях, требующих высокой производительности, показана на фиг.24. Более конкретно, систему (устройство) 100А обнаружения можно использовать в качестве автоматизированной системы для микробиологической лаборатории. Например, устройство (система) 100А может составить один из компонентов автоматизированной лабораторной системы. В этом варианте устройство (систему) 100А обнаружения можно включить в функциональную цепочку, включающую также один или более взаимодополняющих аналитических модулей или устройств для дополнительных тестирований. Например, как показано на фиг.24, устройство 100А может быть подключено ко второму, аналогичному блоку 100В обнаружения. Однако в других вариантах устройство для обнаружения может быть включено в цепочку, содержащую также один или более других модулей. Эти другие модули или системы могут включать, например, системы идентификации и тестирования, такие как системы VITEK или VIDAS, выпускаемые заявителем настоящего изобретения, прибор для окрашивания по Граму, масс-спектрометр, систему молекулярной диагностики, систему для микробиологического посева, автоматизированную систему для определения характеристик и/или идентификации (раскрытую в американской патентной заявке №60/216,339, поданной 15.05.2009 заявителем настоящего изобретения и озаглавленной "System for Combining a Non-invasive Rapid Detection Blood Culture System with an Invasive Microbial Separation and Characterization System", или другие аналитические системы).
Как показано на фиг.24, автоматизированная лабораторная система может содержать первую систему 100А обнаружения и вторую систему 100B обнаружения. В других вариантах автоматизированная лабораторная система, в дополнение к названным системам обнаружения, может содержать автоматизированную систему идентификации/определения характеристик (не изображена). Согласно этому варианту положительные контейнеры могут переноситься из первой системы 100А обнаружения во вторую систему 100В обнаружения и/или в автоматизированную систему идентификации/определения характеристик с использованием устройства 440 переноса (сопрягающего устройства). В других вариантах первая система 100А обнаружения может быть подключена к модулю идентификации микроорганизма или к модулю определения чувствительности к антимикробным препаратам (не изображен).
Сопрягающее устройство (сопрягающий механизм), обеспечивающее (обеспечивающий) перенос от первого устройства ко второму контейнера, находящегося внутри первого устройства, может содержать: (а) первый узел позиционирования, связанный с первым устройством и выполненный с возможностью перемещения контейнера к одному или более операционным участкам; (b) транспортный механизм или транспортерную ленту, связанный (связанную) со вторым устройством и установленный (установленную) смежно с первым узлом позиционирования, и (с) толкатель, выполненный с возможностью протолкнуть или продвинуть контейнер от первого узла позиционирования к транспортному механизму, обеспечивающему перенос контейнера из первого устройства во второе устройство. В другом варианте первое и второе устройства могут быть устройствами для культивирования, а контейнер - контейнером для образцов. Еще в одном варианте сопрягающий механизм содержит первый транспортный механизм или первую транспортерную ленту, связанную с первым устройством, первый узел позиционирования, связанный с первым устройством, второй транспортный механизм или вторую транспортерную ленту, связанную со вторым устройством, второй узел позиционирования, связанный со вторым устройством, и толкатель для переноса контейнера из первого узла позиционирования ко второму транспортному механизму или второй транспортерной ленте и, тем самым, для переноса контейнера из первого устройства во второе устройство. Еще в одном варианте сопрягающий механизм может содержать мостик, связанный с первым и вторым устройствами и, следовательно, связывающий первое устройство со вторым устройством. У мостика имеются первый конец, расположенный смежно с первым узлом позиционирования, и второй конец, расположенный смежно со вторым транспортным механизмом или второй транспортерной лентой. Связывая первое устройство со вторым устройством, мостик представляет собой средство для переноса контейнера из первого устройства во второе устройство. Таким образом, в данном варианте механизм переноса может содержать мостик, связывающий первое устройство со вторым устройством. При этом у мостика имеются первый конец, расположенный смежно с первым узлом позиционирования, и второй конец, расположенный смежно с указанным вторым транспортным механизмом, так что мостик связывает первый узел позиционирования и второй транспортный механизм. В данном варианте толкатель выполнен с возможностью протолкнуть контейнер через мостик и, тем самым, перенести контейнер из первого устройства во второе устройство.
Как показано на фиг.24-25С, две системы обнаружения 100А и 100В объединены в функциональную цепочку посредством сопрягающего механизма 441 (механизма переноса). Это позволяет переносить контейнеры из одной системы обнаружения в другую в случае, если одна из них заполнена. Аналогичный сопрягающий механизм может быть предусмотрен и для последующего переноса контейнера 500 для образцов из второй системы 100B обнаружения к установленным за ней системам или модулям (как это было описано выше). Сопрягающий механизм 441 переноса содержит первый узел 400А позиционирования контейнера, содержащий станцию 420 переноса для осуществления переноса контейнера во второе или последующее устройство (последующую систему). Сопрягающий механизм 441 содержит также толкатель 444, приводимый в действие двигателем 442 толкателя, и мостик 446 (см. фиг.24-25С). Как показано, толкатель 444 может содержать пару параллельных планок. В процессе функционирования, когда подлежащий переносу контейнер перемещается посредством станции 420 переноса в составе первого узла 400А позиционирования контейнера, приводится в действие толкатель 444, чтобы протолкнуть (продвинуть) контейнер от станции 420 переноса по мостику 446 к последующей системе 100В обнаружения. Как показано на фиг.25А, толкатель 444 связан с двигателем 442 толкателя через опорную конструкцию 445. На фиг.25А-25С иллюстрируется перенос контейнера от станции 420 переноса первой системы 100А обнаружения на транспортерную ленту 206 В (см. фиг.24) второй системы 100В обнаружения. При этом контейнер показан: (1) в первом положении (см. фиг.25А), когда толкатель 444 начинает продвигать его через мостик 446; (2) во втором, т.е. промежуточном, положении (см. фиг.25В), когда контейнер пересек мостик 446, и (3) в третьем (окончательном) положении (фиг.25С), когда контейнер поступил на транспортерную ленту (не изображена) следующей (второй) системы 100B обнаружения. Как показано на фиг.25А-25С, сопрягающее устройство 440 может дополнительно содержать один или более направляющих рельсов 450, прикрепленных к основанию 409 узла позиционирования посредством одной или более опор 452 направляющих рельсов, и/или направляющие планки 448 мостика, чтобы направлять контейнер от первого узла 400А позиционирования через мостик 446 на транспортерную ленту 206 В (см. фиг.24) автоматического загрузочного механизма 200B последующей системы 100В обнаружения. Как понятно специалистам, перенос контейнера из первой системы 100А обнаружения во вторую (последующую) систему 100В обнаружения с использованием первого узла 400А позиционирования контейнера и толкателя 444 может управляться контроллером системы. В типичном варианте, как это показано на фиг.24, только первая система 100А обнаружения должна содержать пользовательский интерфейс 150. При этом первая и вторая системы 100А, 100В обнаружения могут содержать также экраны 152А, 152В статуса, порты (выходы) 130А, 130В для положительных контейнеров, нижние панели 140А, 140B доступа, автоматические загрузочные механизмы 200А, 200B и транспортерные ленты 206А, 206В.
Кроме того, согласно этому варианту положительные контейнеры могут переноситься в другие системы в составе автоматизированной лабораторной системы. Например, как показано на фиг.24, контейнер, определенный как положительный в первой системе 100А обнаружения, может быть перенесен во вторую систему 100В обнаружения и/или в установленную за ней систему автоматизированного определения характеристик/идентификации (не изображена) для автоматизированного определения характеристик и/или идентификации микроба.
Специалистам понятно, что возможны и другие конструкции или конфигурации автоматизированной лабораторной системы, не выходящие за границы изобретения.
Функционирование
В одном варианте предлагаемый способ обнаружения роста микроорганизмов в автоматизированной системе обнаружения включает: (а) обеспечение наличия контейнера для образцов, содержащего культуральную среду, чтобы инициировать и/или ускорить рост указанных микроорганизмов; (b) инокулирование контейнера для образцов образцом, подлежащим тестированию на присутствие микроорганизмов; (с) загрузку, с использованием автоматического загрузочного механизма, инокулированного контейнера для образцов в устройство для обнаружения; (а) перенос, с использованием автоматического механизма переноса, инокулированного контейнера для образцов к накопителю, находящемуся внутри системы обнаружения, содержащему множество ячеек для размещения одного или более контейнеров для образцов и, в качестве опции, обеспечивающему колебательное движение контейнеров для образцов с целью инициировать и/или ускорить рост микроорганизмов в контейнере; (е) обеспечение наличия блока обнаружения для обнаружения микробного роста в контейнере для образцов путем обнаружения в нем одного или более продуктов, возникающих в результате роста микроорганизмов и (f) обнаружение роста микроорганизмов с использованием указанного блока обнаружения и определение тем самым контейнера как положительного в отношении роста микроорганизмов.
Далее, со ссылками на фиг.30, будет описан способ функционирования системы 100 обнаружения. После инокуляции (произведенной, например, врачом или лаборантом) контейнера 500 тестируемым образцом контейнер 500 для образцов доставляется к автоматическому загрузочному механизму 200 для его автоматизированной загрузки в систему 100 обнаружения.
На шаге (операции) 540 контейнер 500 для образцов загружают в систему 100 обнаружения, например помещая контейнер в зону 202 загрузки транспортного механизма 204, как показано, например, на фиг.1. После этого контейнер 500 для образцов перемещают, посредством транспортного механизма 204 (например, транспортерной ленты), к входному порту 110 и затем через этот входной порт в систему 100 обнаружения, осуществляя автоматическую загрузку контейнера 500 для образцов в эту систему.
На шаге 550 можно использовать автоматический механизм 700 переноса, такой как роботизированная рука (показанная, например, на фиг.5А-5В), чтобы перенести контейнер 500 к находящемуся во внутренней камере 620 системы 100 обнаружения накопителю 600 и поместить в него контейнер 500.
На шаге 560 контейнер 500 для образцов инкубируют в системе 100 обнаружения. Система 100 обнаружения может дополнительно приводить в колебательное движение (например, посредством взбалтывающего узла) накопители (полки) 600 и/или использовать одну или более воздуходувок 740 (см. фиг.5А-5В) для подачи теплого воздуха, чтобы создать контролируемую атмосферу и, тем самым, инициировать и/или ускорить микробный рост в контейнере 500 для образцов.
На шаге 570 информация с контейнера 500 для образцов считывается блоком 810 обнаружения (см., например, фиг.9А и 9В), чтобы определить, является ли контейнер 500 для образцов положительным в отношении микробного роста.
На шаге 580 информацию, считанную с контейнера для образцов, анализируют, чтобы установить, является ли контейнер положительным в отношении роста в нем микробного агента (например, микроорганизмов). Если нет, способ продолжается по ветви 582 "НЕТ", т.е. производится проверка, сработал ли таймер (шаг 584), т.е. истекло ли задаваемое им время. Если таймер сработал, контейнер признается отрицательным и переносится на шаге 586 в сборник 146 отрицательных контейнеров (см., например, фиг.1). В противном случае инкубация продолжается при периодическом считывании (на шаге 580) информации с контейнера 500 для образцов.
Если на шаге 580 контейнер 500 для образцов определяется как положительный, способ продолжается по ветви 590 "ДА". В одном варианте контейнер 500 для образцов на шаге 594 с использованием автоматического транспортного механизма переносится (например, автоматически выгружается, как это было описано выше) в зону для положительных контейнеров (к выходному порту 130 - см., например, фиг.1) для обеспечения доступа к нему со стороны пользователя и/или для дальнейшей обработки. В другом варианте для дальнейшей обработки контейнер для образцов может быть перенесен, с использованием сопрягающего механизма, в другое устройство обнаружения и/или в другую аналитическую систему (например, в автоматизированную систему определения характеристик и/или идентификации) для дальнейшей обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ И ПРИГОТОВЛЕНИЯ ОБРАЗЦА МИКРООРГАНИЗМА КАК ДЛЯ ИДЕНТИФИКАЦИИ, ТАК И ДЛЯ ТЕСТОВ НА ЧУВСТВИТЕЛЬНОСТЬ К АНТИБИОТИКАМ | 2016 |
|
RU2718086C2 |
| АВТОМАТИЗИРОВАННОЕ ОБОРУДОВАНИЕ ДЛЯ ПОЛУЧЕНИЯ БИБЛИОТЕК ПЕПТИДОВ Т-КЛЕТОЧНЫХ РЕЦЕПТОРОВ | 2019 |
|
RU2770700C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ ОБРАБОТКИ СТЕКЛЯННЫХ ИЗДЕЛИЙ | 2017 |
|
RU2728636C2 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СПОСОБ ПРЯМОЙ ИНОКУЛЯЦИИ БУЛЬОНА ИЗ ИСХОДНОЙ СУСПЕНЗИИ | 2019 |
|
RU2807112C2 |
| ЦИФРОВОЙ ОПТИЧЕСКИЙ БЛОК, УСТРОЙСТВО И СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825976C1 |
| АВТОМАТИЗИРОВАННЫЙ МНОГОМОДУЛЬНЫЙ ИНСТРУМЕНТ ДЛЯ РЕДАКТИРОВАНИЯ КЛЕТОК (ВАРИАНТЫ) | 2018 |
|
RU2755308C2 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| МАГАЗИН БЫСТРОГО ОБСЛУЖИВАНИЯ ПОКУПАТЕЛЕЙ НА АВТОМОБИЛЯХ | 2017 |
|
RU2665991C1 |
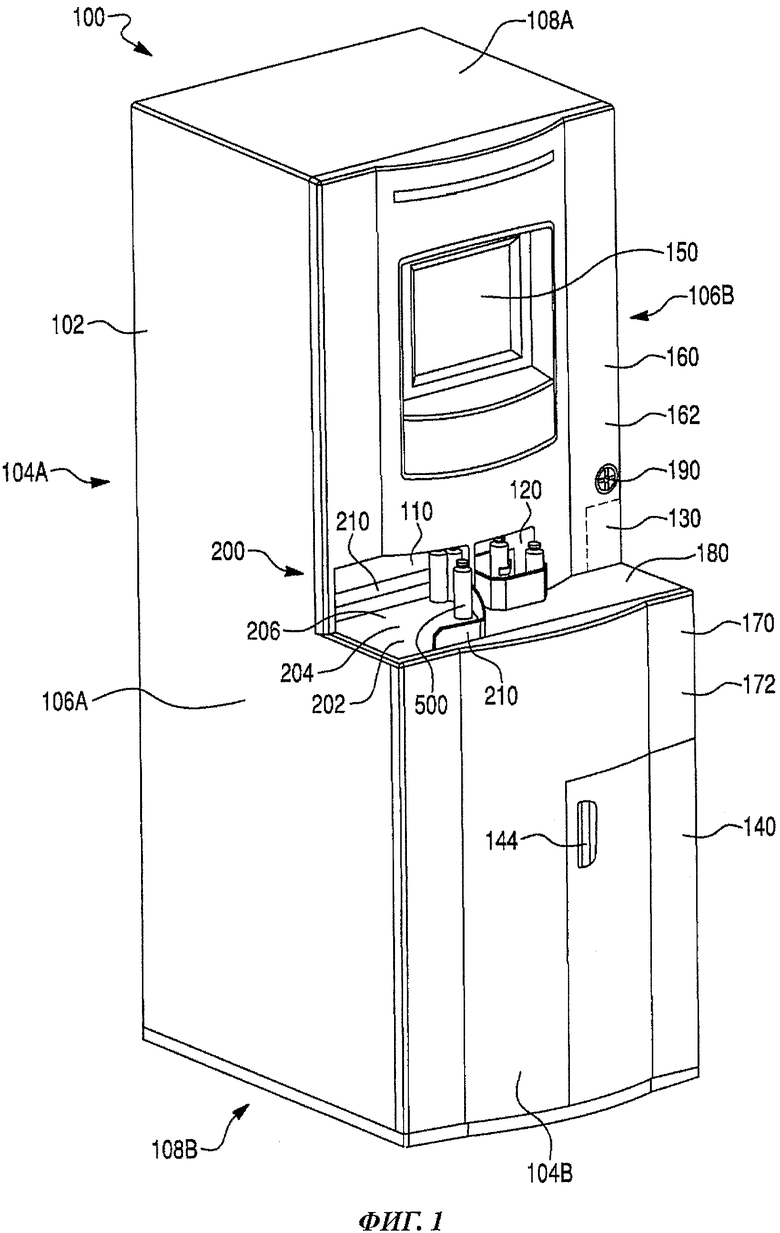
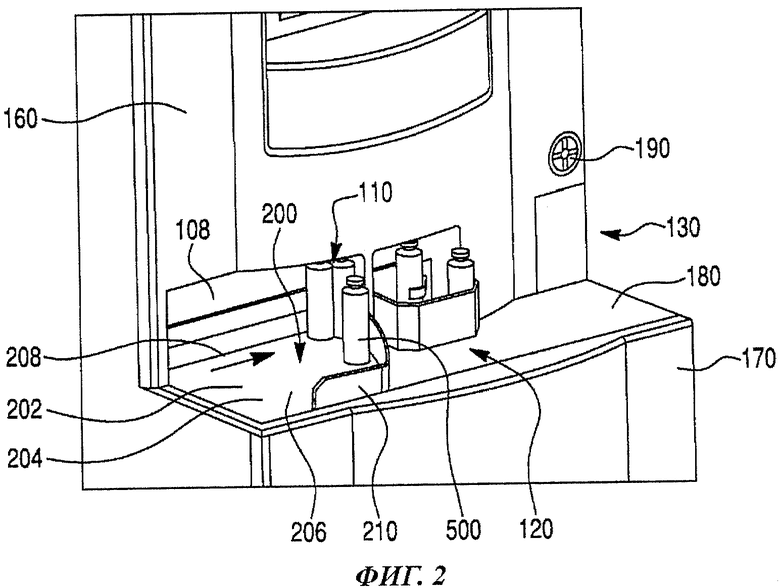
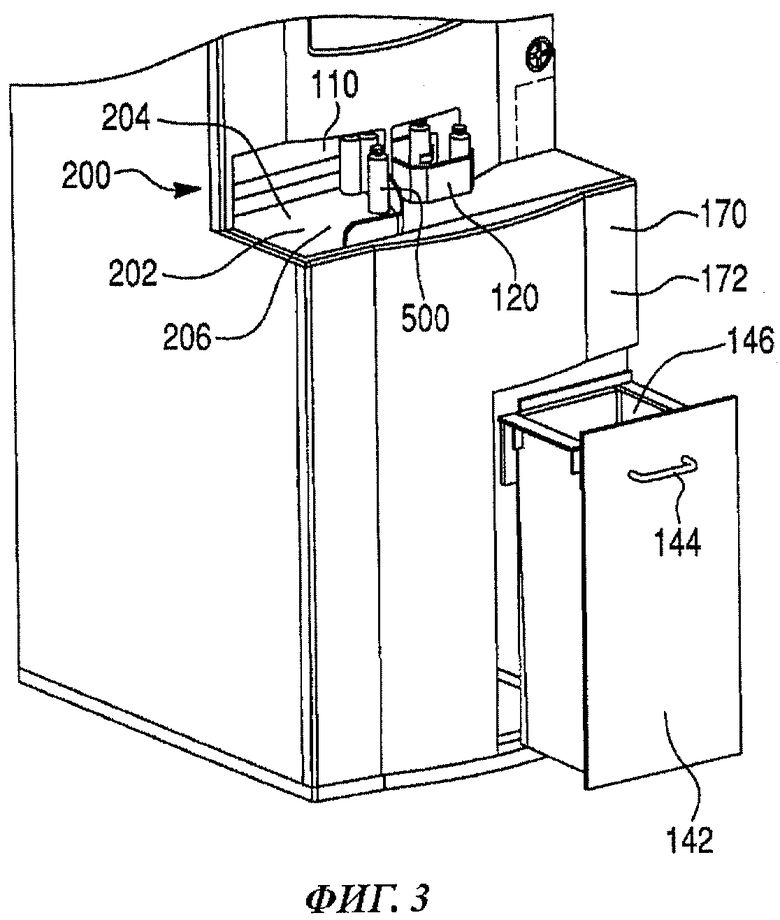
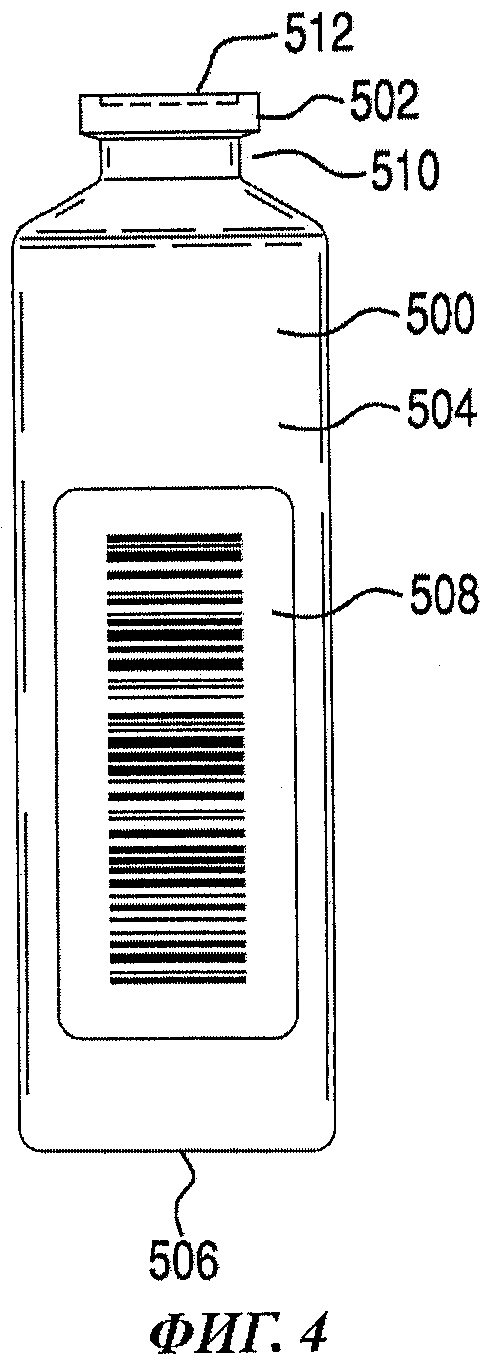
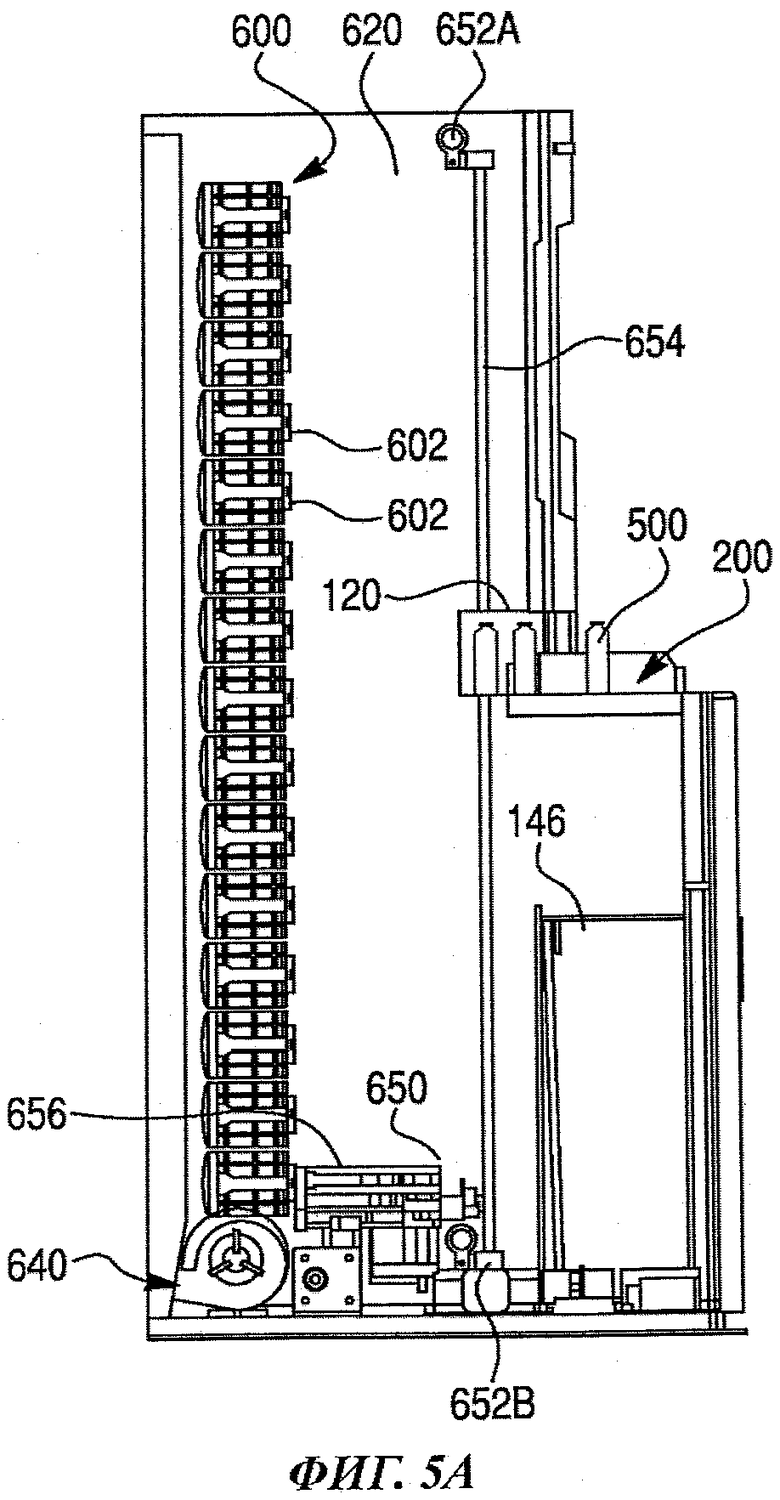
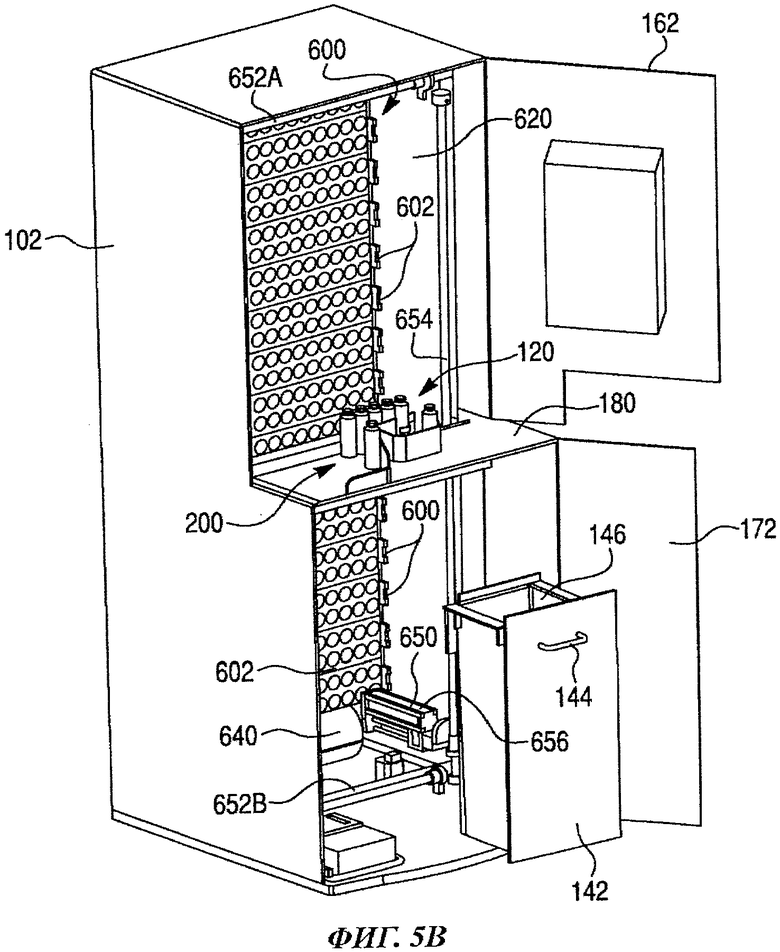
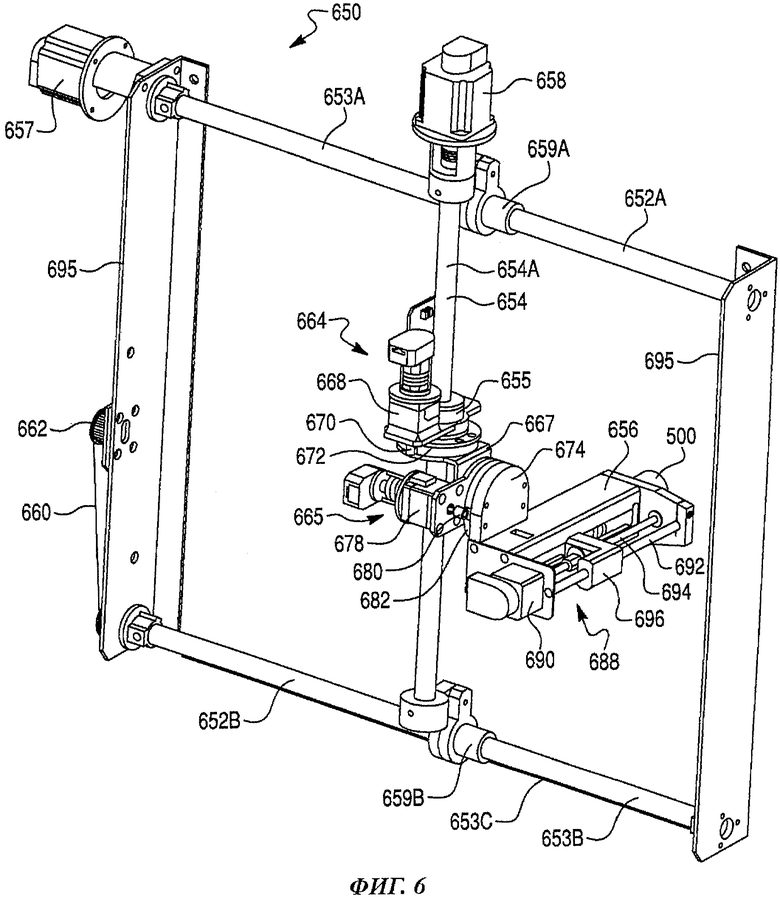
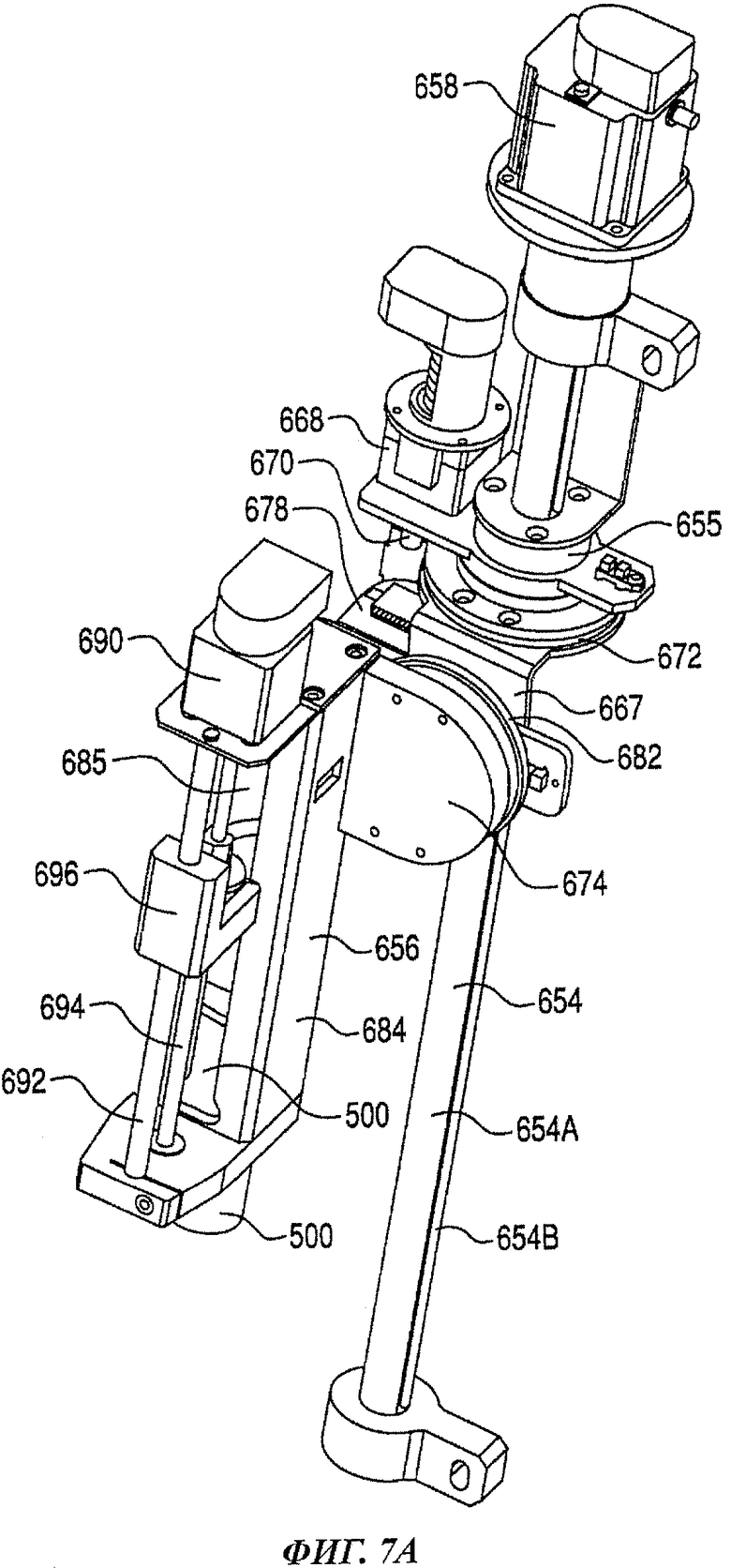
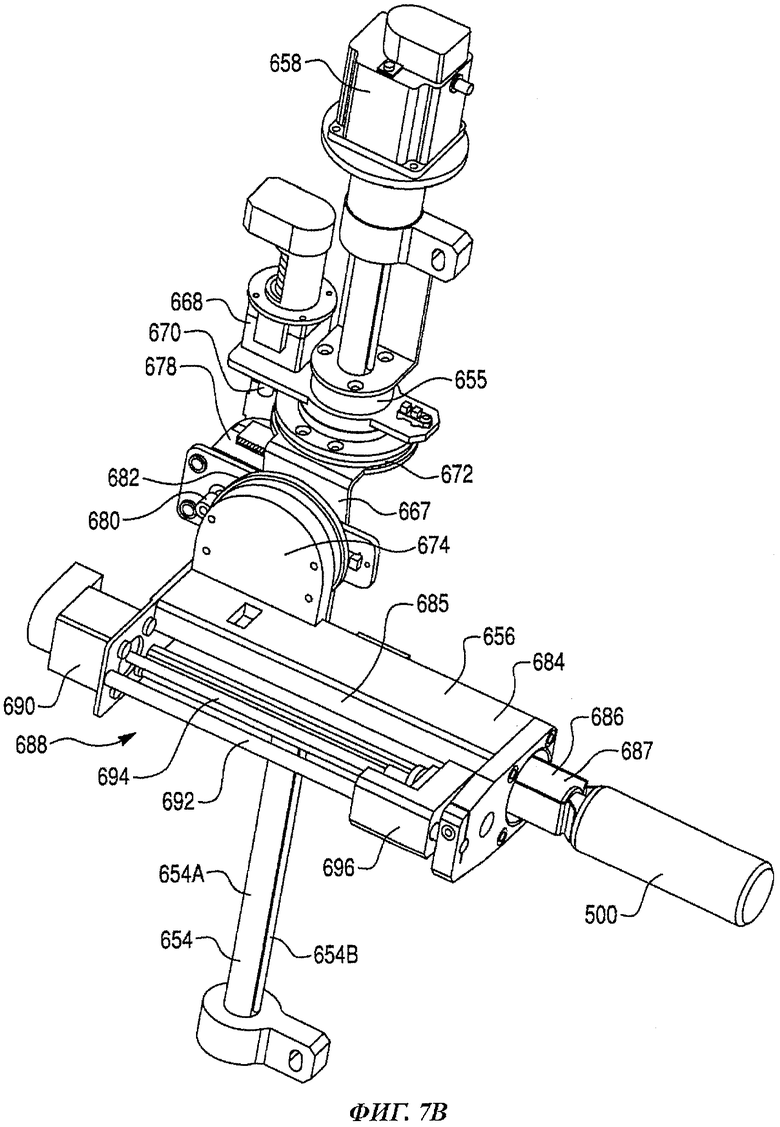
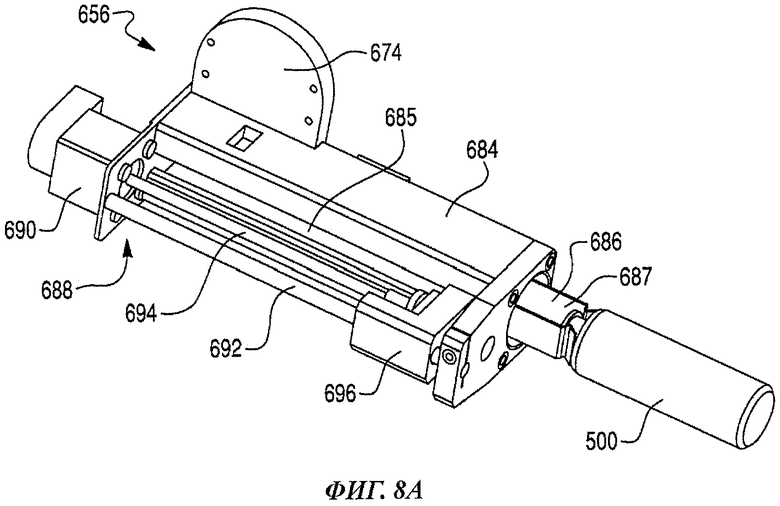
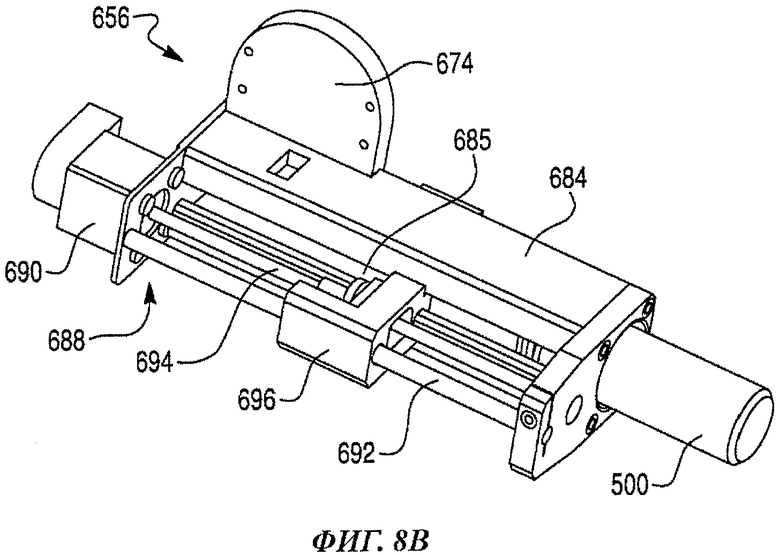
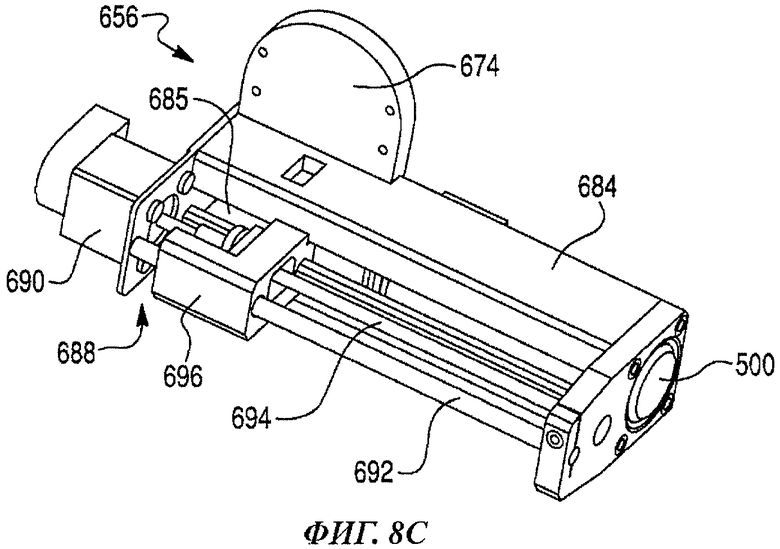
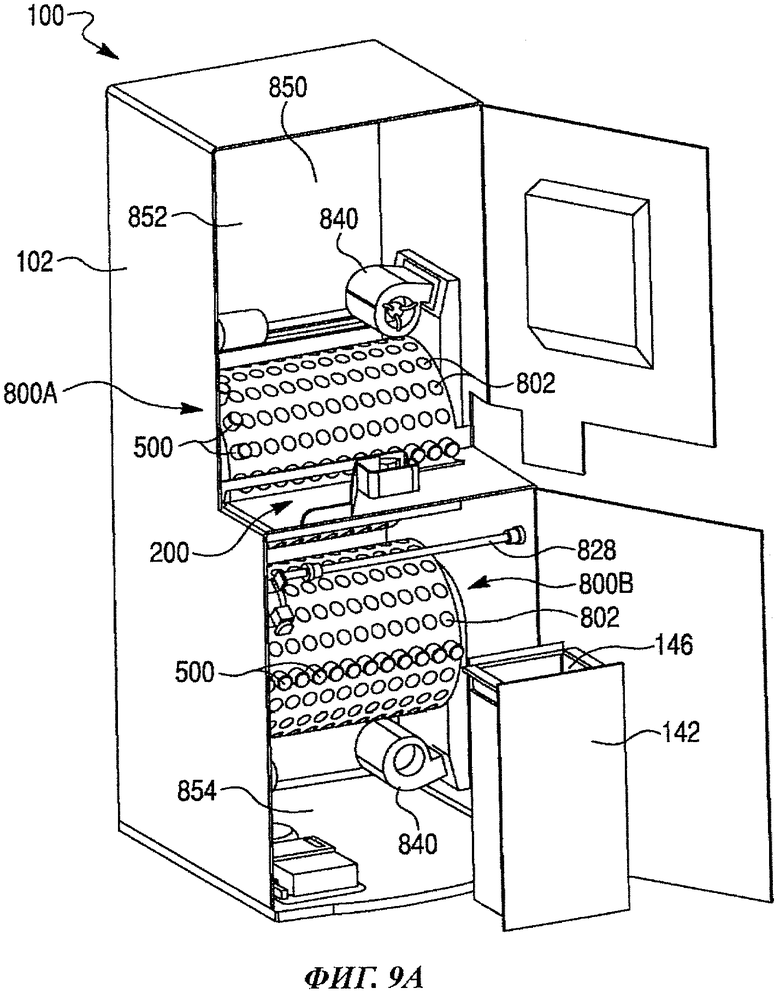
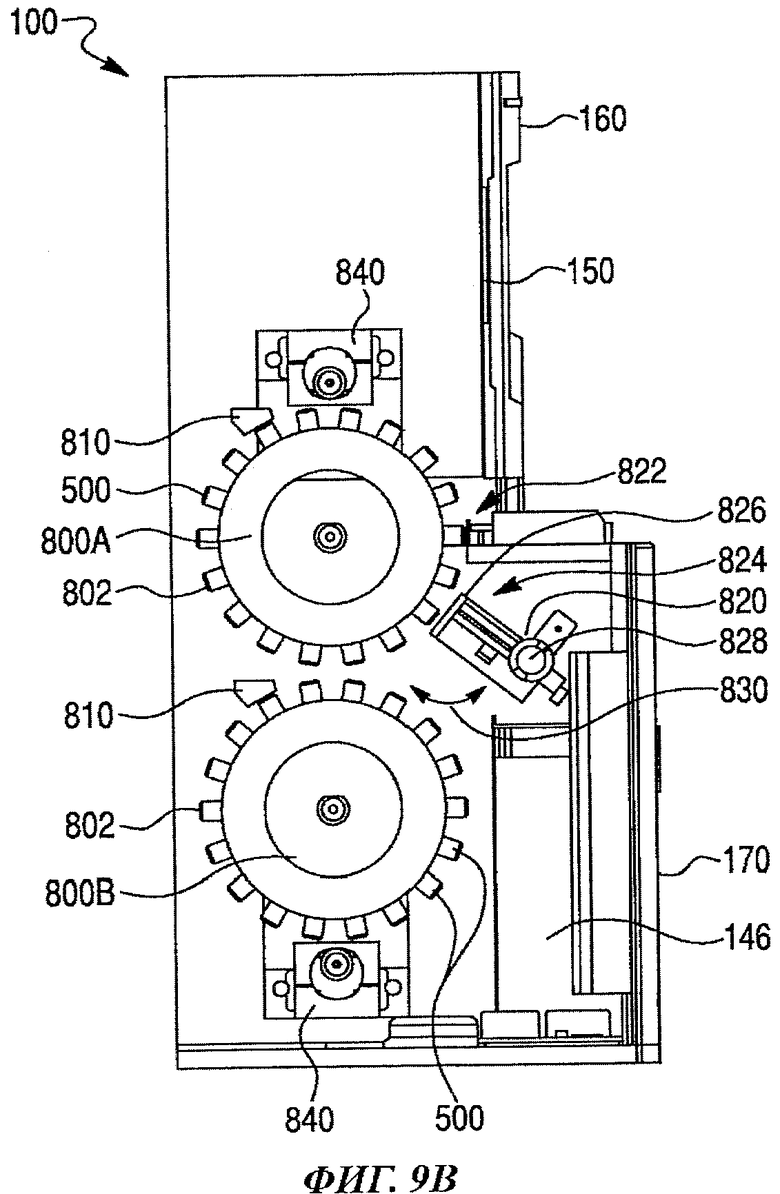
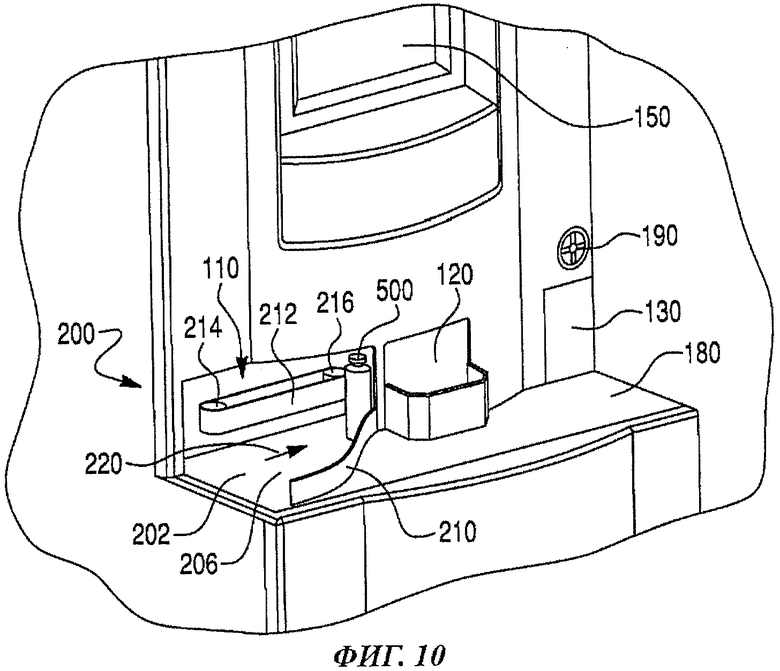
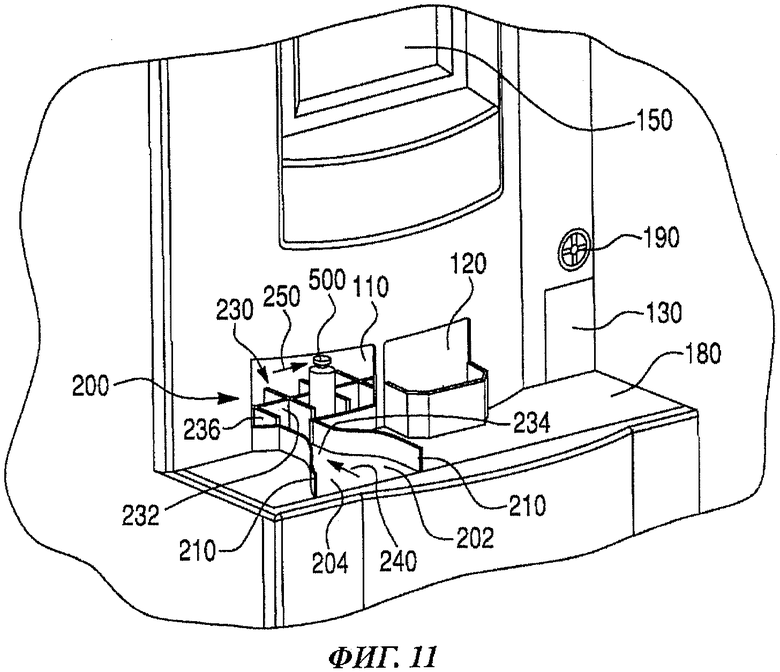
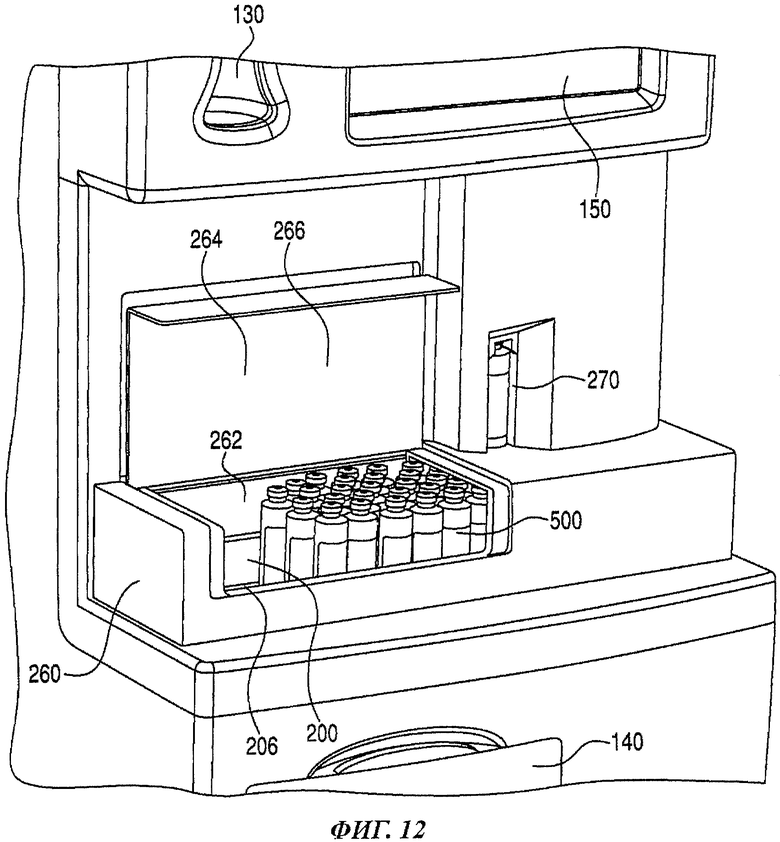
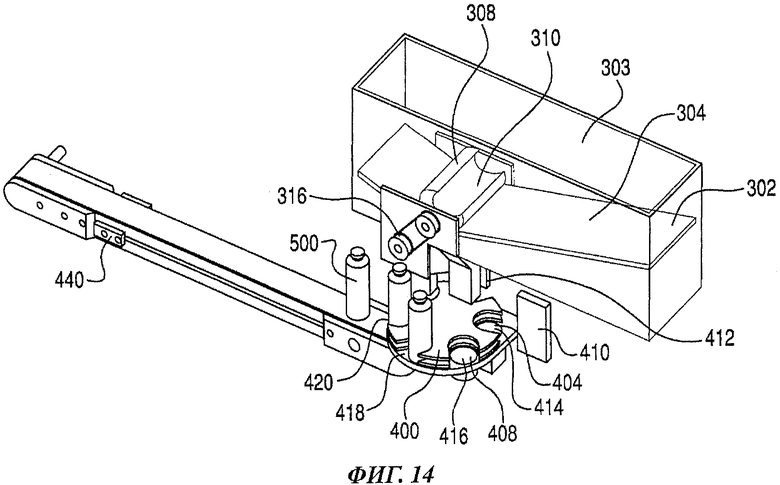
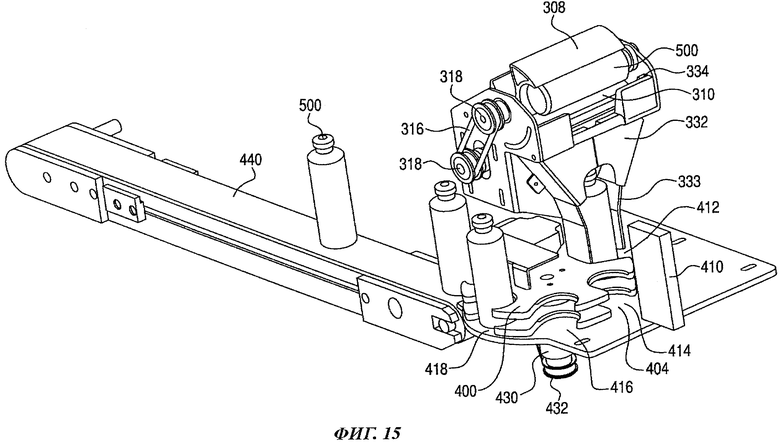
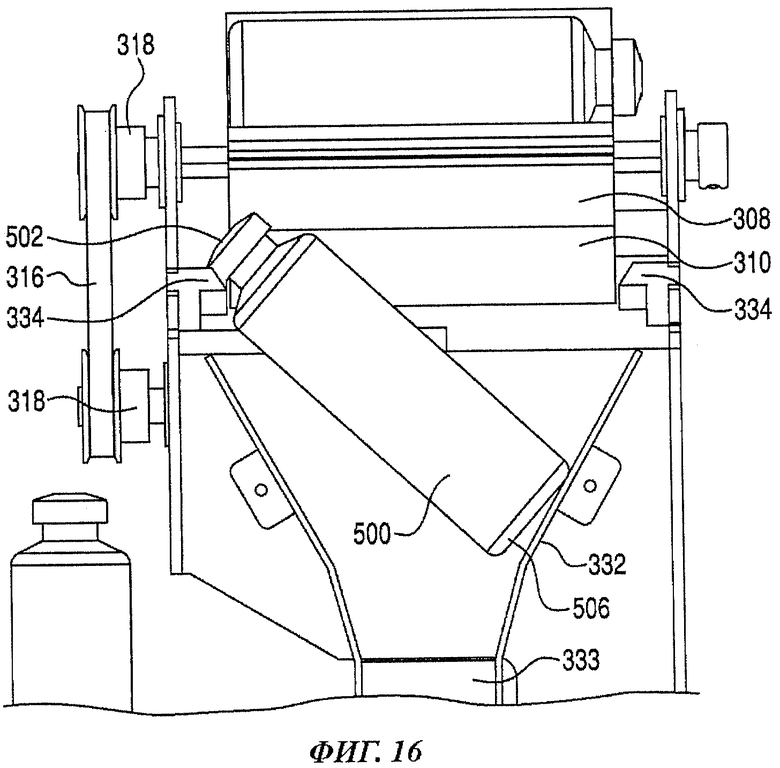
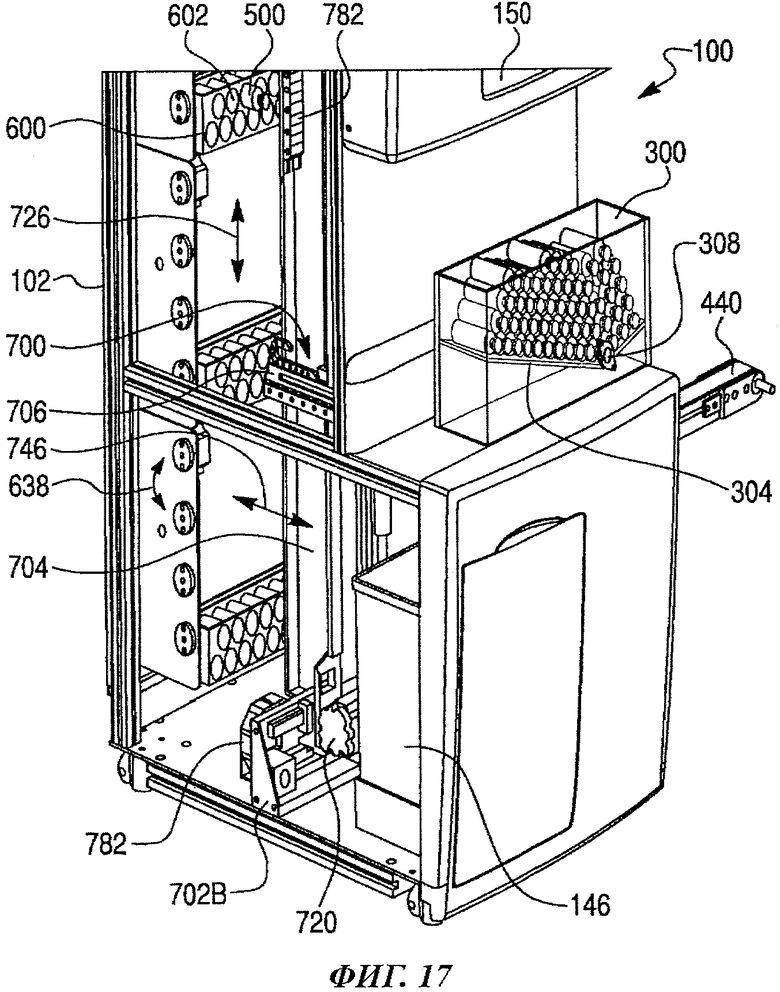
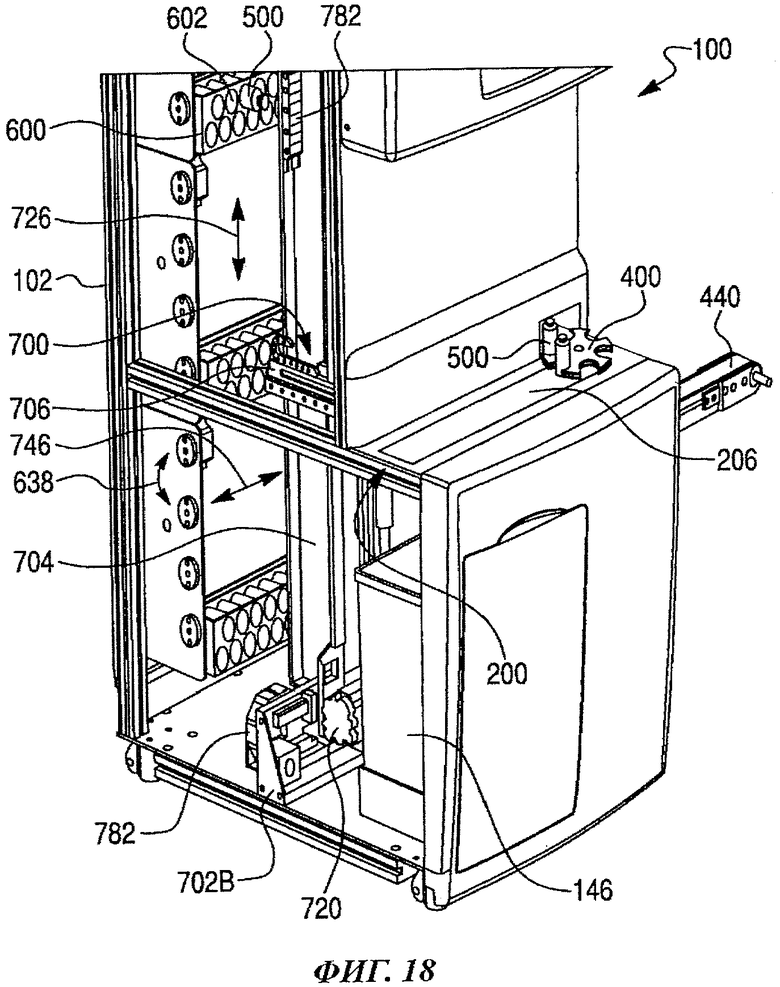
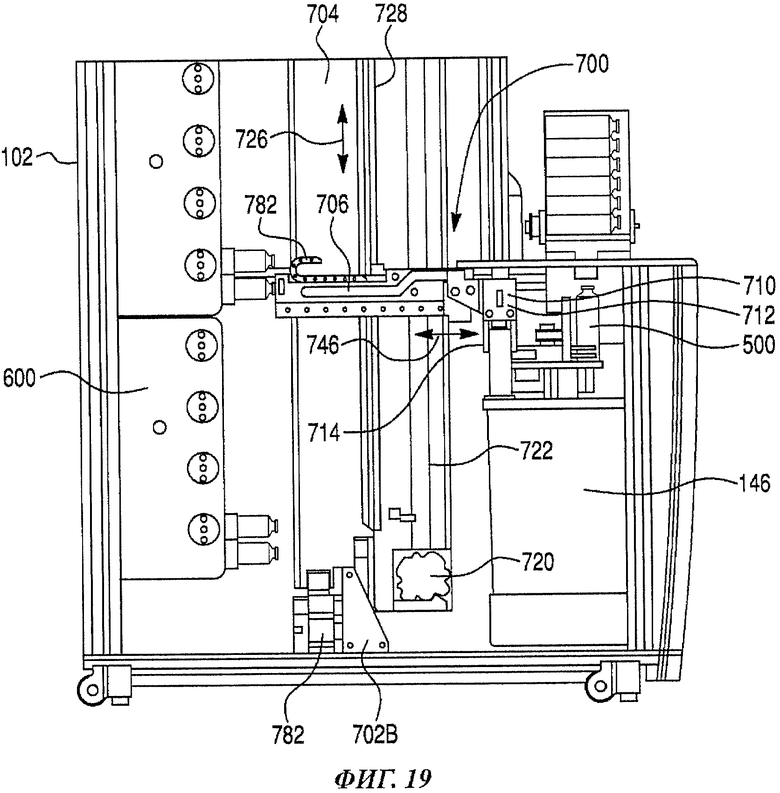
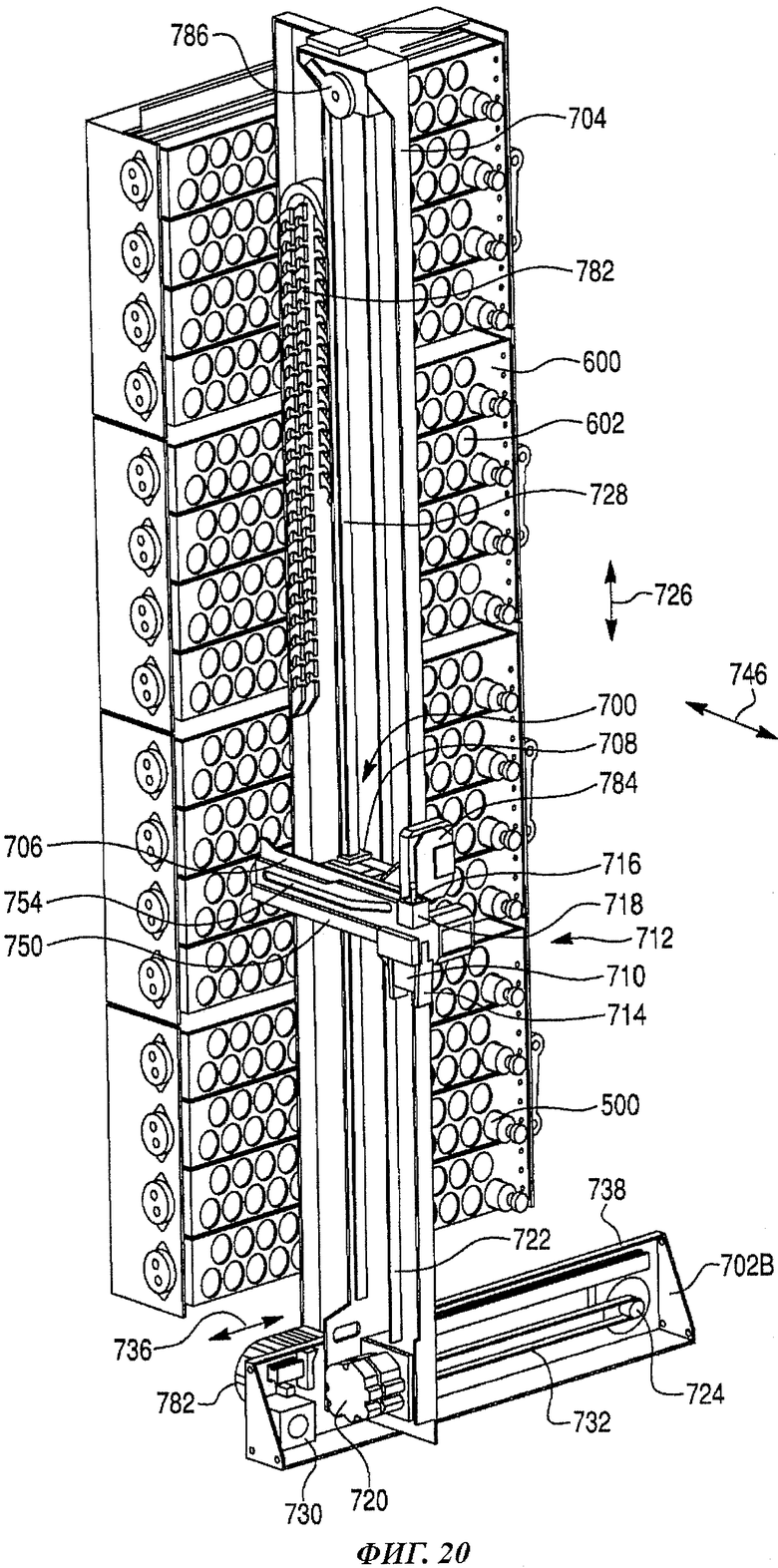
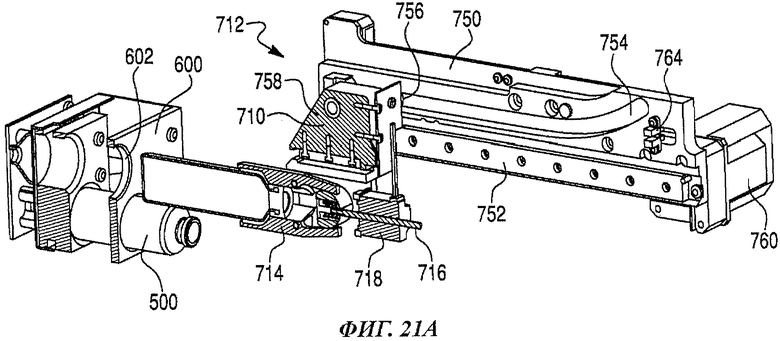
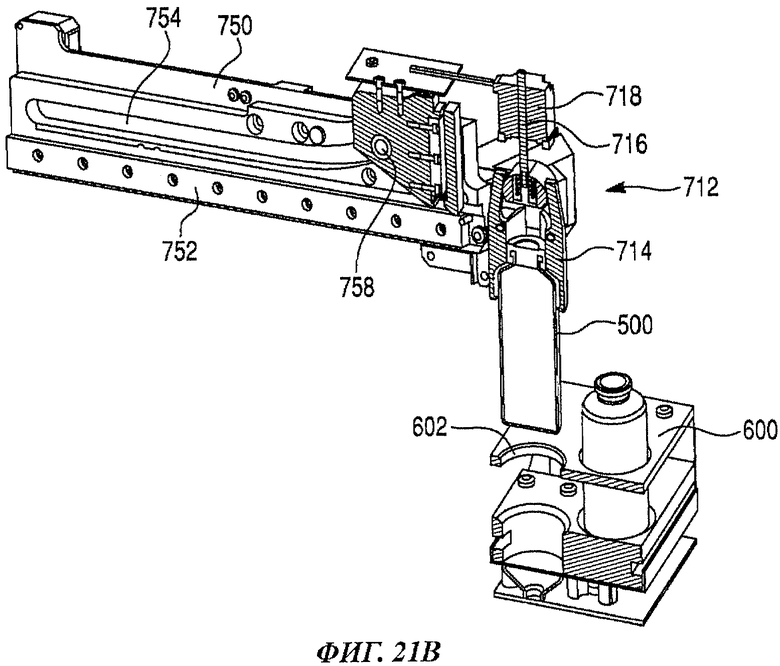
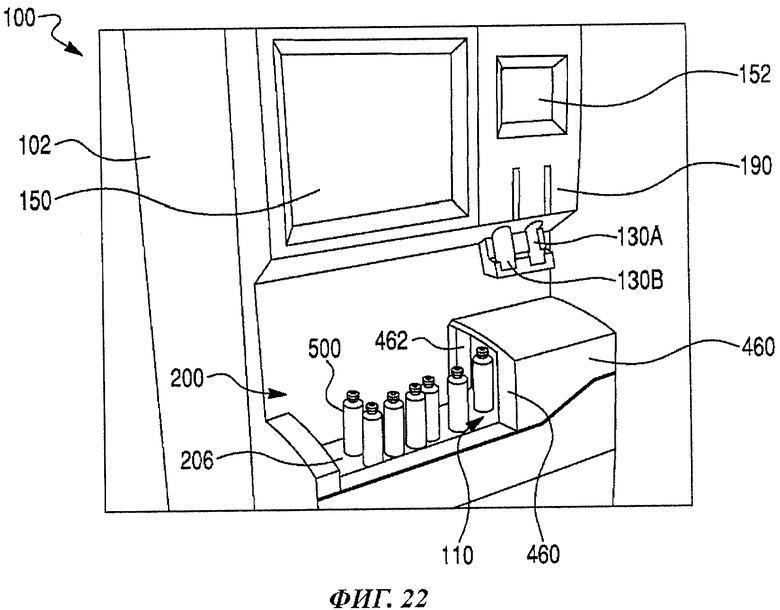
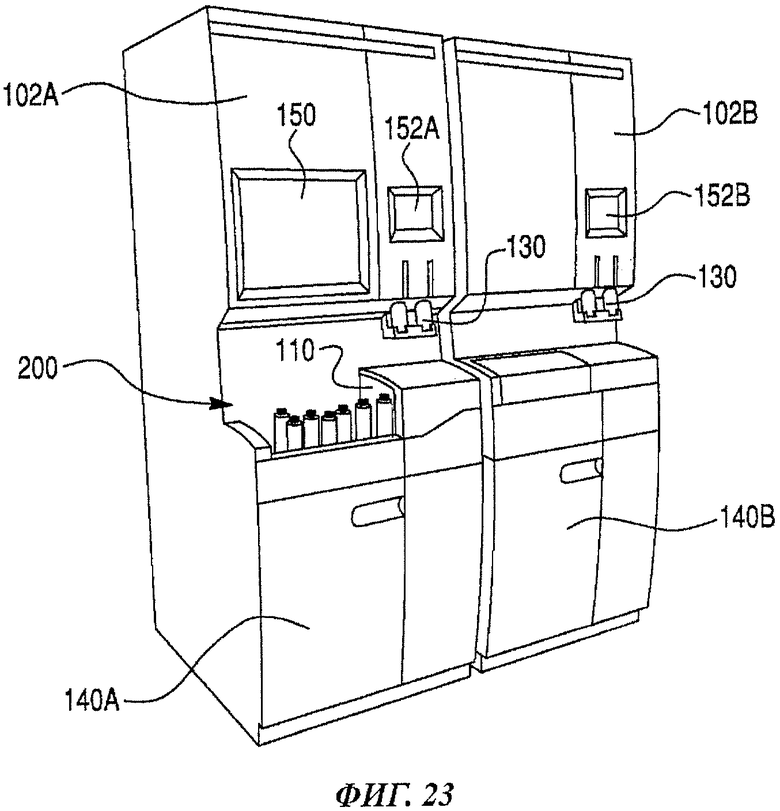
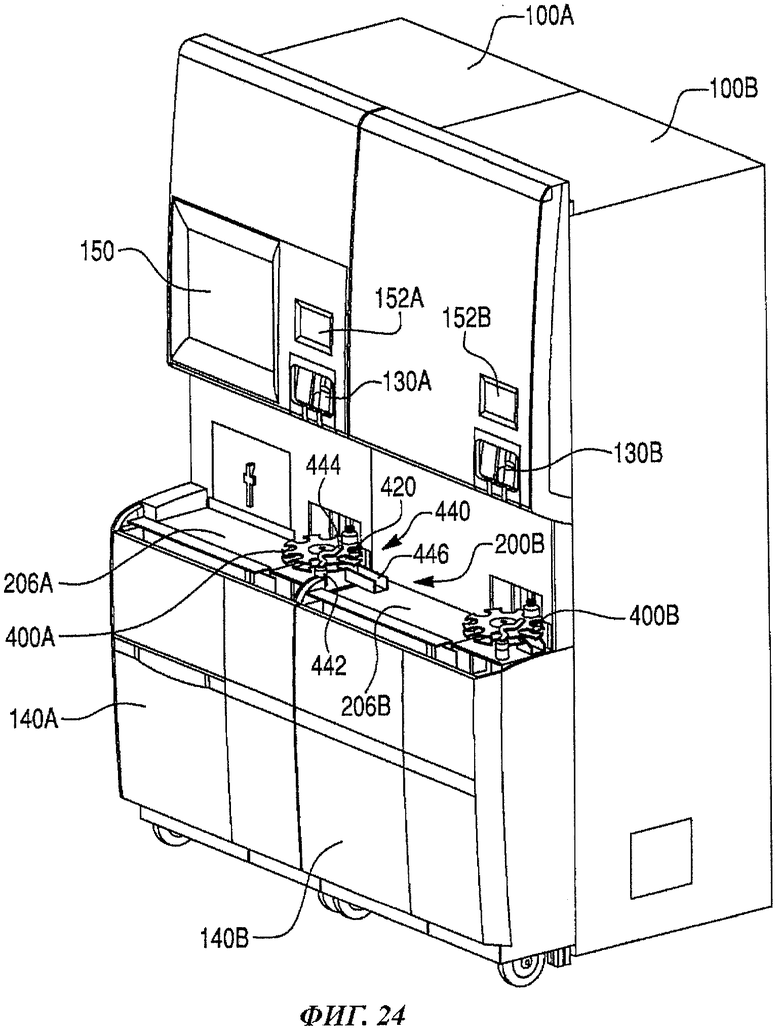
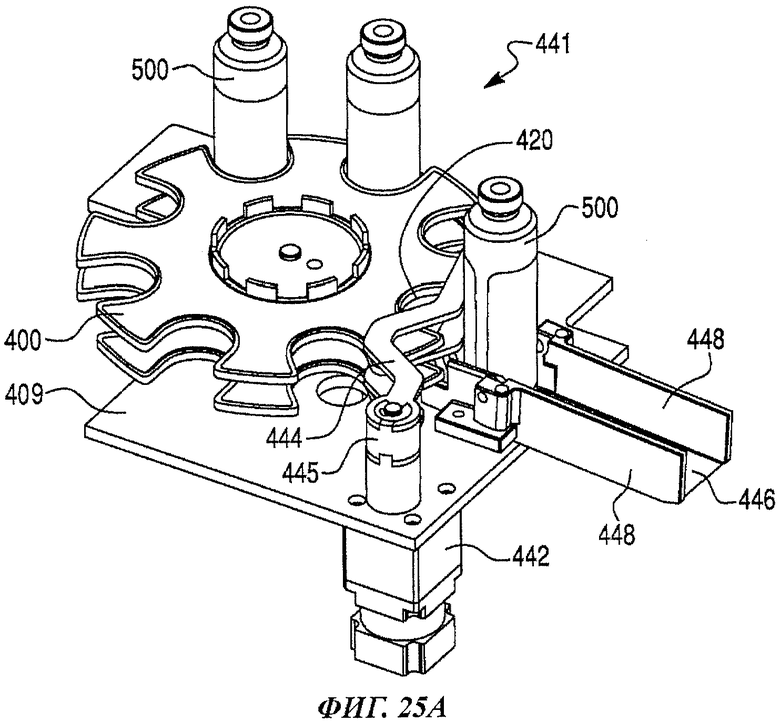
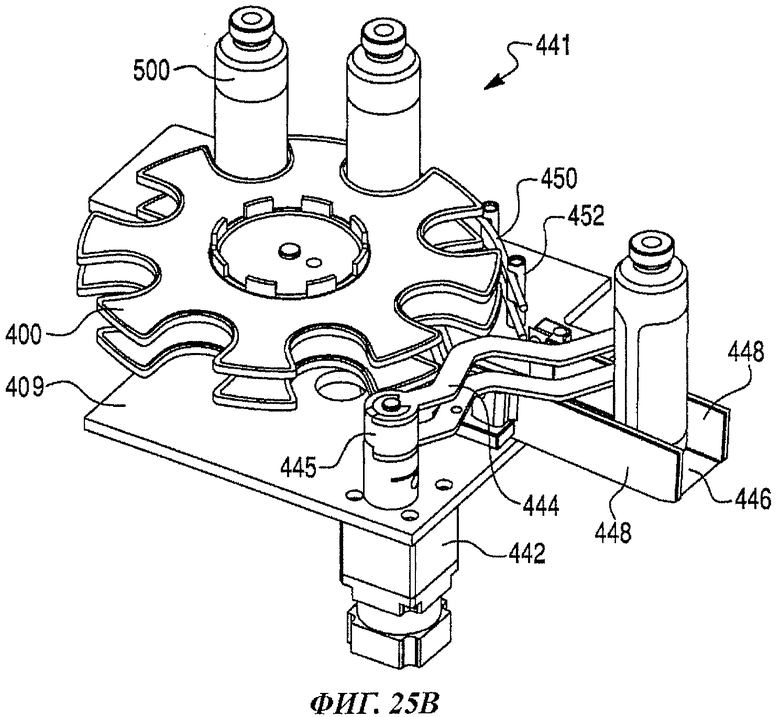
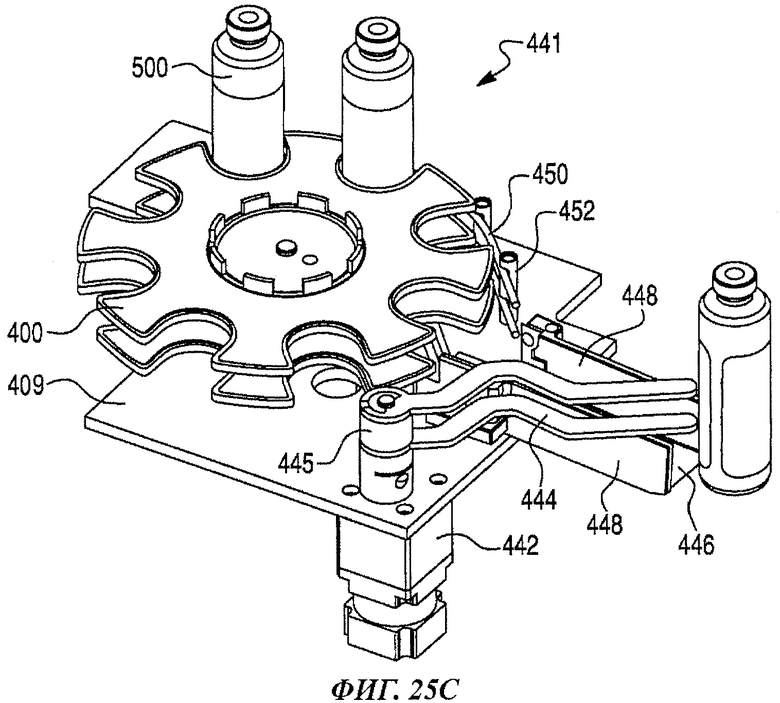
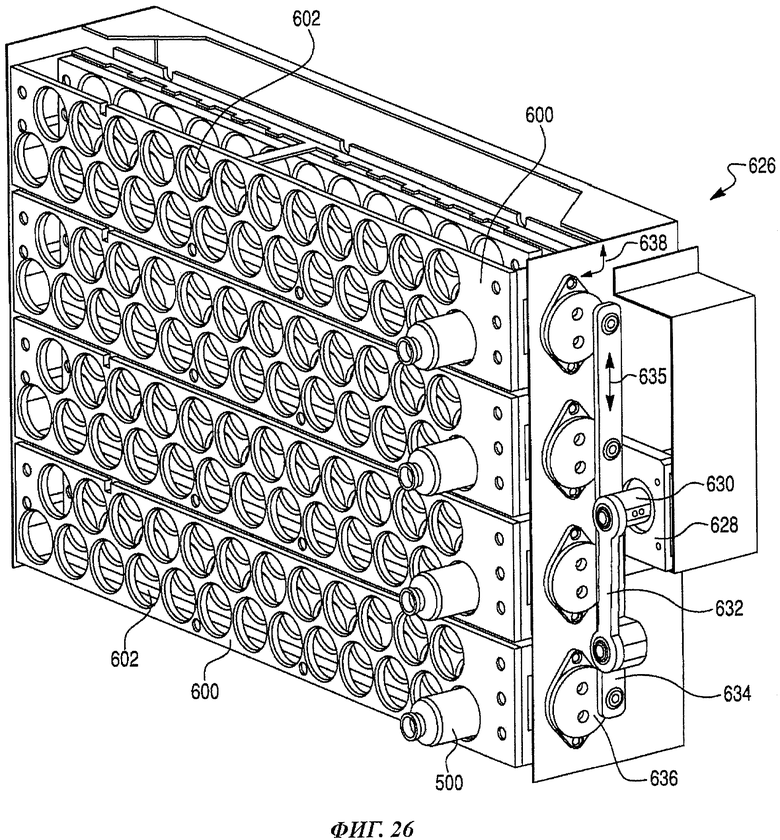
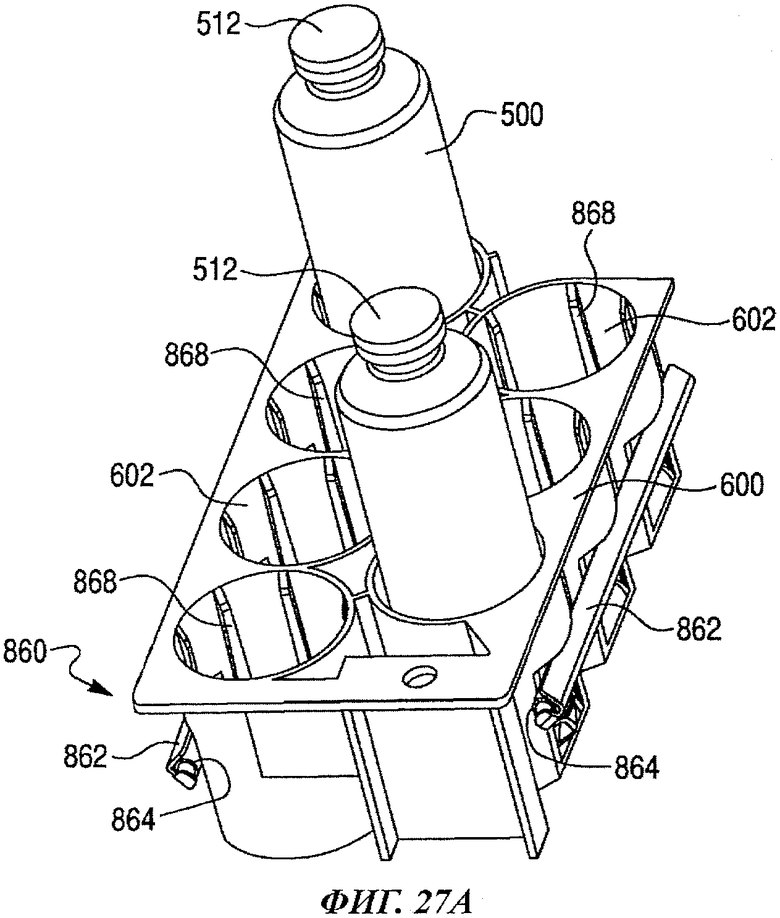
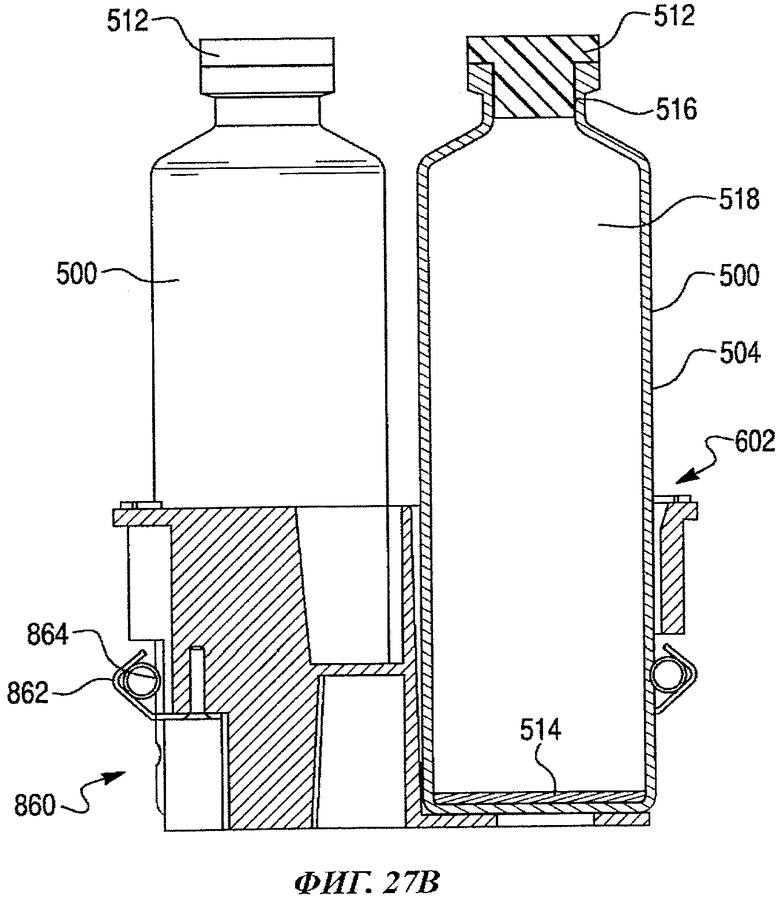
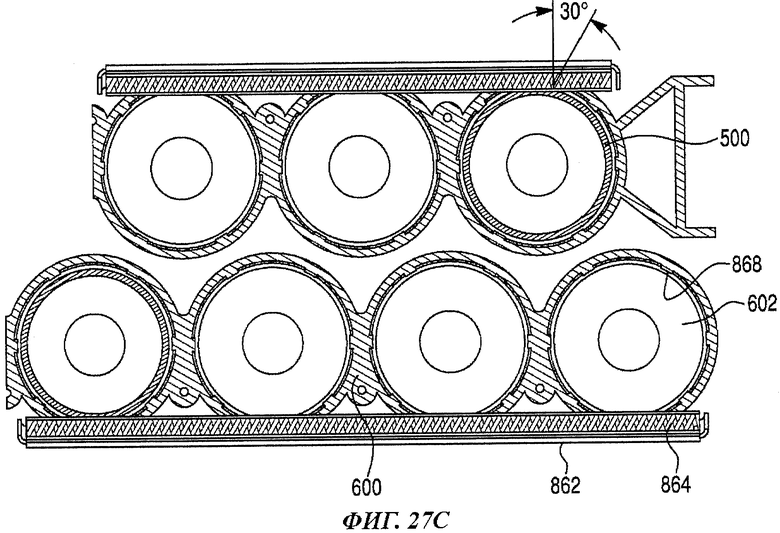
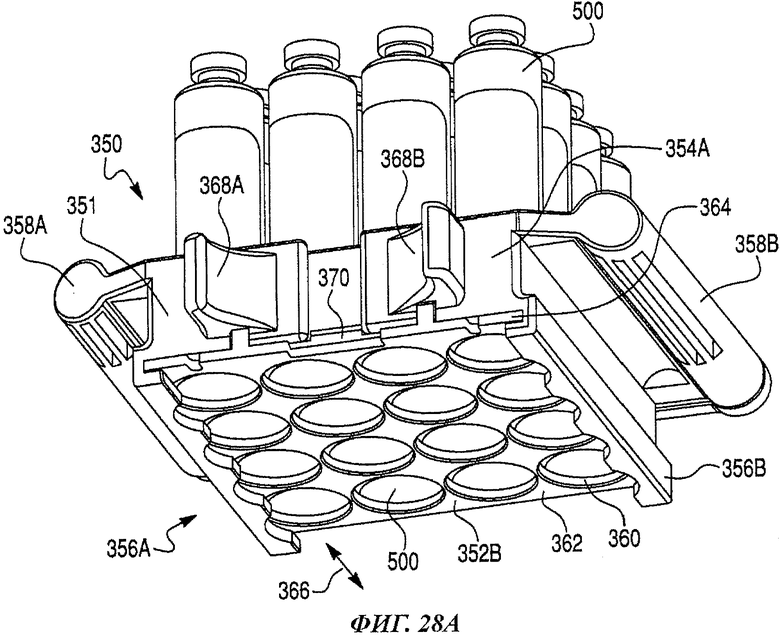
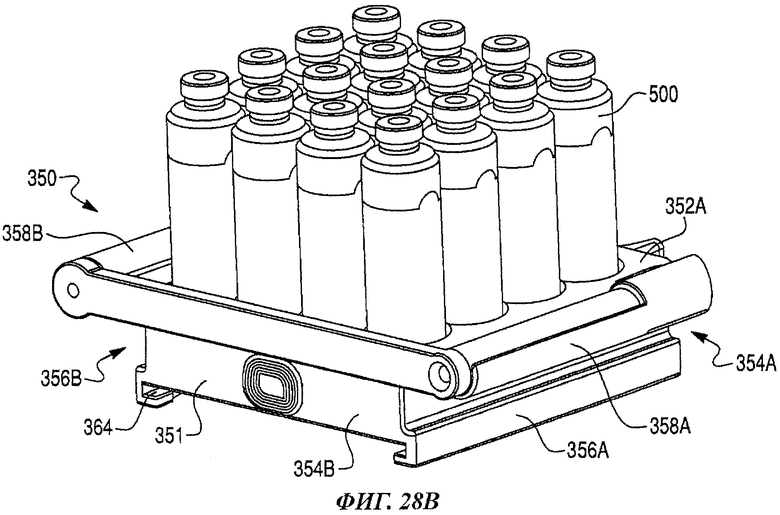
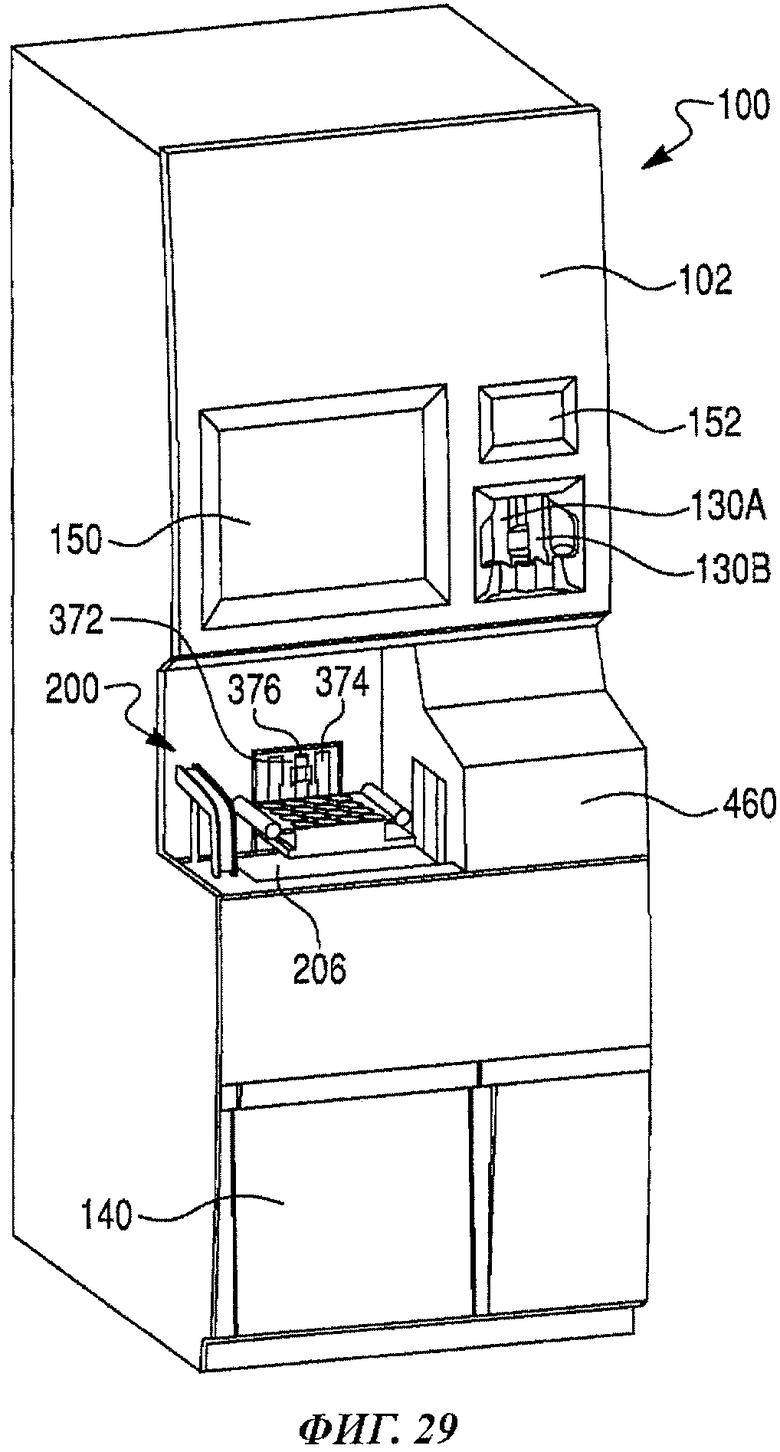
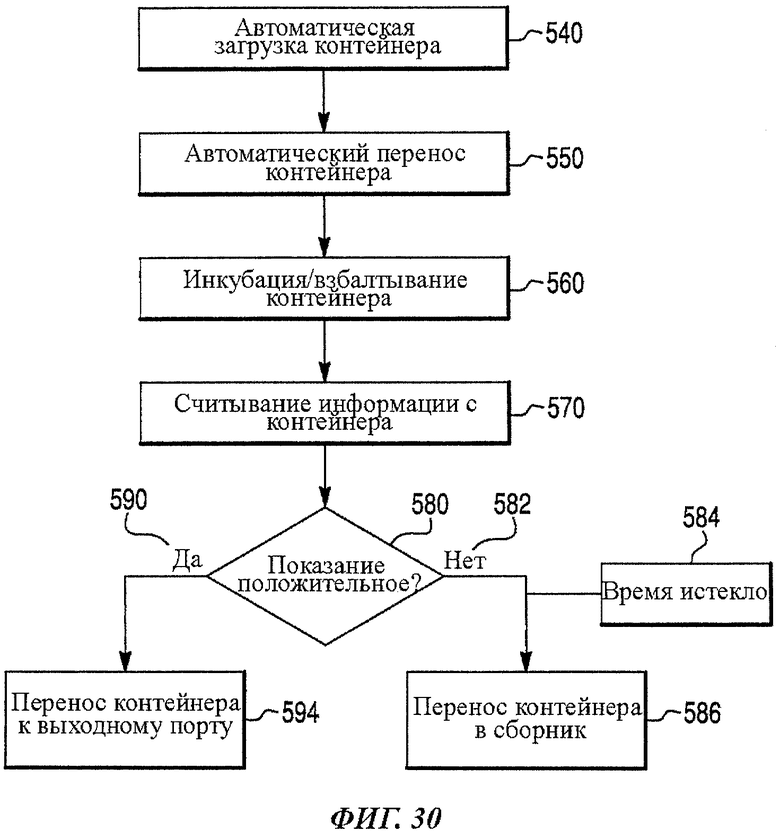
Заявленная группа изобретений относится к средствам для быстрого неинвазивного обнаружения микробного агента в тестируемом образце. Устройство, обеспечивающее обнаружение микробного агента, содержит герметизируемый контейнер для образцов, имеющий внутреннюю полость с помещенной в него культуральной средой для культивирования любых микроорганизмов, которые могут присутствовать в тестируемом образце; корпус, окружающий внутреннюю камеру; накопитель, находящийся во внутренней камере и содержащий множество ячеек для размещения одного или более контейнеров для образцов; узел позиционирования контейнера, содержащий вращающийся диск, снабженный одним или более позиционирующими гнездами, каждое из которых способно удерживать один из указанных контейнеров для образцов, причем указанный вращающийся диск выполнен с возможностью вращения в горизонтальной плоскости вокруг вертикальной оси и размещения указанных контейнеров для образцов между одним или более операционными участками; автоматический загрузочный механизм для автоматизированной загрузки указанного контейнера для образцов во внутреннюю камеру, содержащий транспортерную ленту, выполненную с возможностью установки одного из указанных контейнеров для образцов в одно из указанных позиционирующих гнезд; установленный во внутренней камере автоматический механизм переноса для автоматизированного переноса контейнера для образцов в пределах внутренней камеры и установленный во внутренней камере блок обнаружения для обнаружения роста микроорганизмов в контейнере для образцов. Указанное устройство реализует соответствующий способ обнаружения роста микроорганизмов. Предложенная группа изобретений позволяет сократить время и полностью автоматизировать процесс анализа образцов на наличие в них микробных агентов. 2 н. и 12 з.п. ф-лы, 30 ил.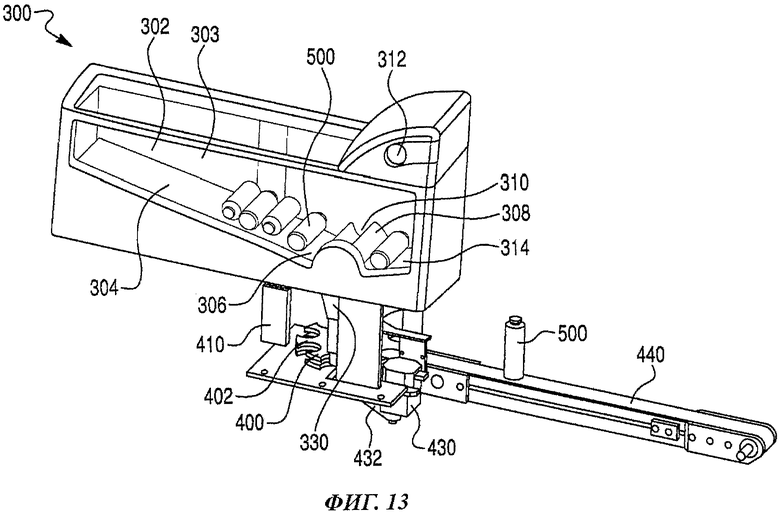
1. Автоматизированная система быстрого неинвазивного обнаружения роста микроорганизмов в тестируемом образце, содержащая:
(a) герметизируемый контейнер для образцов, имеющий внутреннюю полость с помещенной в него культуральной средой для культивирования любых микроорганизмов, которые могут присутствовать в тестируемом образце;
(b) корпус, окружающий внутреннюю камеру;
(c) накопитель, находящийся во внутренней камере и содержащий множество ячеек для размещения одного или более контейнеров для образцов;
(d) узел позиционирования контейнера, содержащий вращающийся диск, снабженный одним или более позиционирующими гнездами, каждое из которых способно удерживать один из указанных контейнеров для образцов, причем указанный вращающийся диск выполнен с возможностью вращения в горизонтальной плоскости вокруг вертикальной оси и размещения указанных контейнеров для образцов между одним или более операционными участками;
(e) автоматический загрузочный механизм для автоматизированной загрузки указанного контейнера для образцов во внутреннюю камеру, содержащий транспортерную ленту, выполненную с возможностью установки одного из указанных контейнеров для образцов в одно из указанных позиционирующих гнезд;
(f) установленный во внутренней камере автоматический механизм переноса для автоматизированного переноса контейнера для образцов в пределах внутренней камеры и
(g) установленный во внутренней камере блок обнаружения для обнаружения роста микроорганизмов в контейнере для образцов.
2. Система по п. 1, отличающаяся тем, что дополнительно содержит автоматический выгружающий механизм для автоматизированной выгрузки контейнера для образцов из системы обнаружения, при этом автоматический выгружающий механизм обеспечивает перенос контейнера для образцов, определенного как положительный в отношении роста микроорганизмов, в зону для положительных контейнеров, а контейнера, определенного как отрицательный в отношении роста микроорганизмов, - в зону для отрицательных контейнеров.
3. Система по п. 1, отличающаяся тем, что автоматический механизм переноса содержит роботизированную руку, представляющую собой многокоординатную роботизированную руку.
4. Система по п. 1, отличающаяся тем, что накопитель дополнительно содержит взбалтывающий узел для взбалтывания содержимого контейнера для образцов с целью инициировать и/или ускорить в нем рост микроорганизмов.
5. Система по п. 1, отличающаяся тем, что внутренняя камера содержит инкубационную камеру, содержащую один или более нагревательных элементов для создания и/или поддержания во внутренней камере контролируемой атмосферы с целью инициировать и/или ускорить рост микроорганизмов, причем внутренняя камера с контролируемой атмосферой выполнена с возможностью поддерживания в ней температуры от около 30°C до около 40°C.
6. Система по п. 1, отличающаяся тем, что один или более операционных участков выбран (выбраны) из группы, состоящей из участка считывания штрих-кодов, участка сканирования контейнера, участка получения изображения контейнера, участка взвешивания контейнера, участка захвата контейнера, участка переноса контейнера или комбинаций указанных участков.
7. Система по п. 1, отличающаяся тем, что автоматический загрузочный механизм содержит станцию загрузки контейнеров, транспортный механизм и вход для контейнеров, при этом транспортный механизм выполнен с возможностью перемещения контейнера для образцов от станции загрузки к входу для контейнеров с целью автоматизированной загрузки указанного контейнера для образцов в систему обнаружения.
8. Система по п. 7, отличающаяся тем, что транспортный механизм содержит транспортерную ленту.
9. Система по п. 1, отличающаяся тем, что дополнительно содержит контроллер, выполненный с возможностью управления автоматическим загрузочным механизмом, узлом позиционирования контейнера и/или автоматическим механизмом переноса с получением полностью автоматизированной системы быстрого неинвазивного обнаружения роста микроорганизмов.
10. Система по любому из пп. 1-9, отличающаяся тем, что дополнительно содержит удерживающее приспособление для удерживания контейнера, причем приспособление содержит:
a) скошенную винтовую пружину, расположенную вблизи приемных ячеек, и
b) удерживающую пластину, снабженную v-образной канавкой и примыкающую к скошенной винтовой пружине для удерживания указанной пружины вблизи приемных ячеек,
при этом скошенная винтовая пружина обеспечивает удерживание одного или более контейнеров в приемной ячейке или в приемных ячейках.
11. Способ обнаружения роста микроорганизмов в автоматизированной системе обнаружения, включающий следующие операции:
(a) обеспечение наличия контейнера для образцов, содержащего культуральную среду, способствующую росту микроорганизмов и/или ускорению указанного роста;
(b) инокулирование контейнера для образцов образцом, подлежащим тестированию на присутствие микроорганизмов;
(c) обеспечение наличия автоматизированной системы обнаружения, содержащей:
(i) корпус, окружающий внутреннюю камеру;
(ii) накопитель, находящийся во внутренней камере и содержащий множество ячеек для размещения одного или более контейнеров для образцов;
(iii) автоматический загрузочный механизм для автоматизированной загрузки контейнера для образцов в автоматизированную систему обнаружения, содержащий транспортерную ленту, выполненную с возможностью установки одного из указанных контейнеров для образцов в одно или более позиционирующих гнезд;
(iv) узел позиционирования контейнера, содержащий вращающийся диск, снабженный указанным одним или более позиционирующими гнездами, каждое из которых способно удерживать один из указанных контейнеров для образцов, причем указанный вращающийся диск выполнен с возможностью вращения в горизонтальной плоскости вокруг вертикальной оси и размещения указанных контейнеров для образцов между одним или более операционными участками;
(v) автоматический механизм переноса для автоматизированного переноса контейнера для образцов внутри указанного корпуса к накопителю и
(vi) блок обнаружения для обнаружения одного или более продуктов, возникающих в результате роста микроорганизмов в контейнере для образцов;
(d) загрузку, с использованием автоматического загрузочного механизма, инокулированного контейнера для образцов в систему обнаружения;
(e) перенос, с использованием автоматического механизма переноса, инокулированного контейнера для образцов к накопителю, находящемуся внутри системы обнаружения;
(f) инкубирование контейнера для образцов в инкубационной камере и
(g) периодический мониторинг контейнера для образцов с целью обнаружения одного или более продуктов, возникающих в результате роста микроорганизмов, при этом контейнер для образцов определяют как положительный в отношении роста микроорганизмов путем обнаружения в нем указанных одного или более продуктов, возникающих в результате роста микроорганизмов.
12. Способ по п. 11, отличающийся тем, что дополнительно включает операцию (d)(1), состоящую в перемещении контейнера для образцов между операционными участками с использованием узла позиционирования контейнера,
при этом один или более операционных участков выбраны из группы, состоящей из участка считывания штрих-кодов, участка сканирования контейнера, участка получения изображения контейнера, участка взвешивания контейнера, участка захвата контейнера, участка переноса контейнера или комбинаций указанных участков.
13. Способ по п. 12, отличающийся тем, что операция (d)(1) включает перемещение контейнера для образцов к участку захвата, при этом способ дополнительно включает операцию выведения контейнера для образцов из участка захвата с использованием автоматического механизма переноса.
14. Способ по п. 11, отличающийся тем, что автоматизированная система обнаружения дополнительно содержит автоматический выгружающий механизм для осуществления автоматизированной выгрузки контейнера для образцов, при этом способ дополнительно включает операцию переноса контейнера для образцов, определенного как положительный в отношении роста микроорганизмов, в зону для положительных контейнеров с использованием указанного автоматического выгружающего механизма или операцию переноса контейнера для образцов, определенного как отрицательный в отношении роста микроорганизмов, в зону для отрицательных контейнеров с использованием указанного автоматического выгружающего механизма.
| US 5498543 A, 12.03.1996 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 5814474 A, 29.09.1998 | |||

