Изобретение относится к области анализа материалов с помощью оптических средств, а именно к способам пассивной дистанционной телевизионной идентификации объектов, и может быть использовано в системах идентификации типа и государственной принадлежности объектов, например воздушных судов.
Существует достаточно большое количество способов дистанционной идентификации объектов. Наиболее распространенными являются способы как визуальной, так и радиолокационной идентификации объекта.
Способы, основанные на радиолокационном способе идентификации, не являющемся пассивным, не могут применяться в боевых условиях для опознавания "свой-чужой", т.к. это демаскирует объект, осуществляющий идентификацию.
В свою очередь недостатки, присущие визуальному способу идентификации объекта ,такие как: небольшая дальность при пассивной идентификации, т.е. при опознавании объекта по внешнему облику; человеческий фактор (усталость зрения, потеря внимания и др.); необходимость использования специальной сигнализации для увеличения расстояния идентификации (сигнальные огни и т.д.), приводящие к демаскировке объекта идентификации, могут быть преодолены за счет использования телевизионных систем высокой четкости.
Наиболее близким по технической сущности является способ пассивной дистанционной телевизионной идентификации объектов RU 2206885, 20.06.2003. Суть известного способа заключается в следующем.
Спектральная характеристика содержащихся в выхлопных газах продуктов сгорания топлива в двигателе летательного аппарата, взятого в качестве идентифицируемого объекта, несет полную характеристику химического состава этого топлива. Следовательно, если в это топливо добавить небольшое количество маркирующей присадки - вещества-идентификатора, имеющего явно выраженную спектральную характеристику, то, проведя анализ спектральной характеристики продуктов сгорания, можно будет отличить "свой" самолет от "чужого". Меняя через определенные промежутки времени вещество-идентификатор, можно исключить возможность использования противником таких же присадок для маскировки.
Изобретение позволяет увеличить дальность опознавания «свой-чужой» до 160-330 км за счет дистанционного измерения спектральных характеристик продуктов сгорания в выхлопных газах с помощью видеоспектрометра.
Недостатком прототипа является невозможность, без ухудшения условий эксплуатации двигателей внутреннего сгорания, подбора комплекта неорганических присадок в топливо двигателя внутреннего сгорания, необходимых для образования в выхлопном газе маркирующей присадки, а также невозможность определения типа и государственной принадлежности летательного аппарата.
Целью изобретения является повышение достоверности идентификации с определением типа и государственной принадлежности объектов.
Техническим результатом заявляемого изобретения является расширение арсенала способов пассивной дистанционной телевизионной идентификации объектов, в частности воздушных судов.
Государственная принадлежность воздушных судов, как правило, для визуальной их идентификации обозначается раскраской фюзеляжа и хвостового оперения воздушного судна. Раскраска определяет спектр отраженного света в изображении. Это позволяет решить обратную задачу, по спектральному распределению восстановить структуру цветовой раскраски. Анализом геометрических параметров изображения можно определить тип объекта.
Технический результат заявляемого способа пассивной дистанционной телевизионной идентификации объектов достигается за счет использования в качестве идентифицирующих признаков геометрических параметров изображения и гистограммы спектра изображения объекта.
Изобретение иллюстрируется Фиг 1-7.
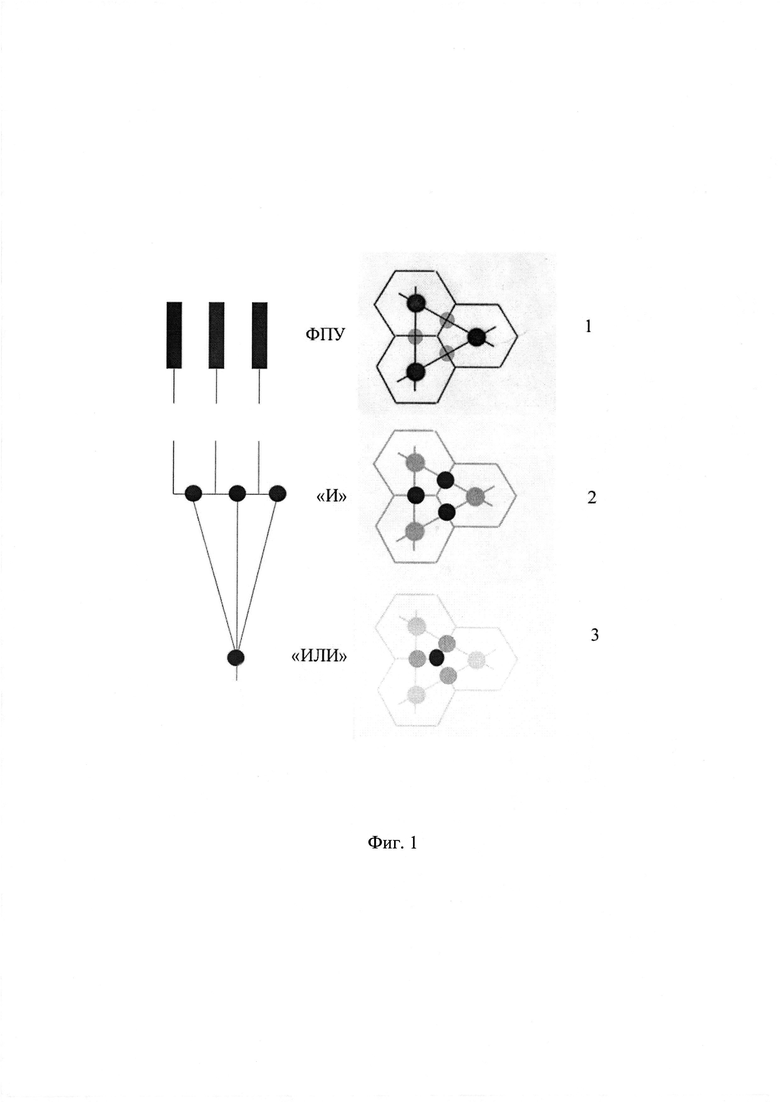
Фиг. 1. Аппаратное построение преобразования сигнала с фотоэлемента в информационную структуру с шестью «узловыми точками».
1 - блок фотоприемного устройства, 2 - слой элементов «И», 3 - слой элементов «ИЛИ».
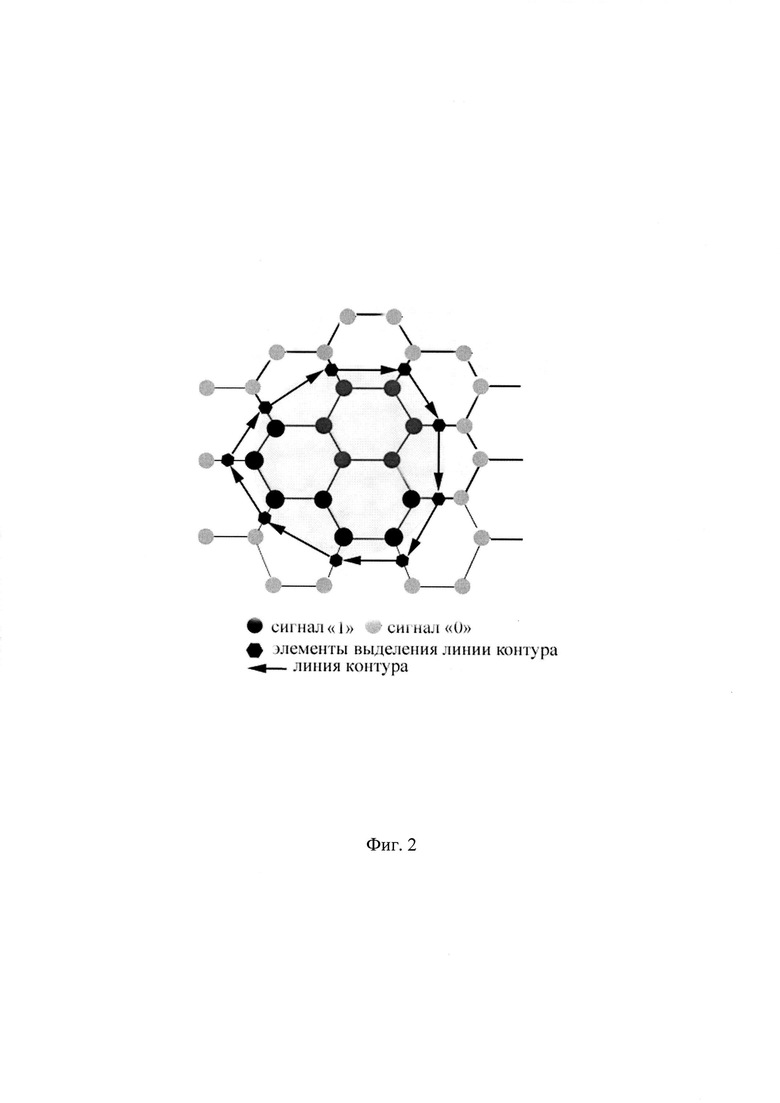
Фиг. 2. Пространственная геометрическая структура размещения элементов булевой алгебры для выделения контура изображения. Линия контура обозначена отрезками прямых со стрелками.
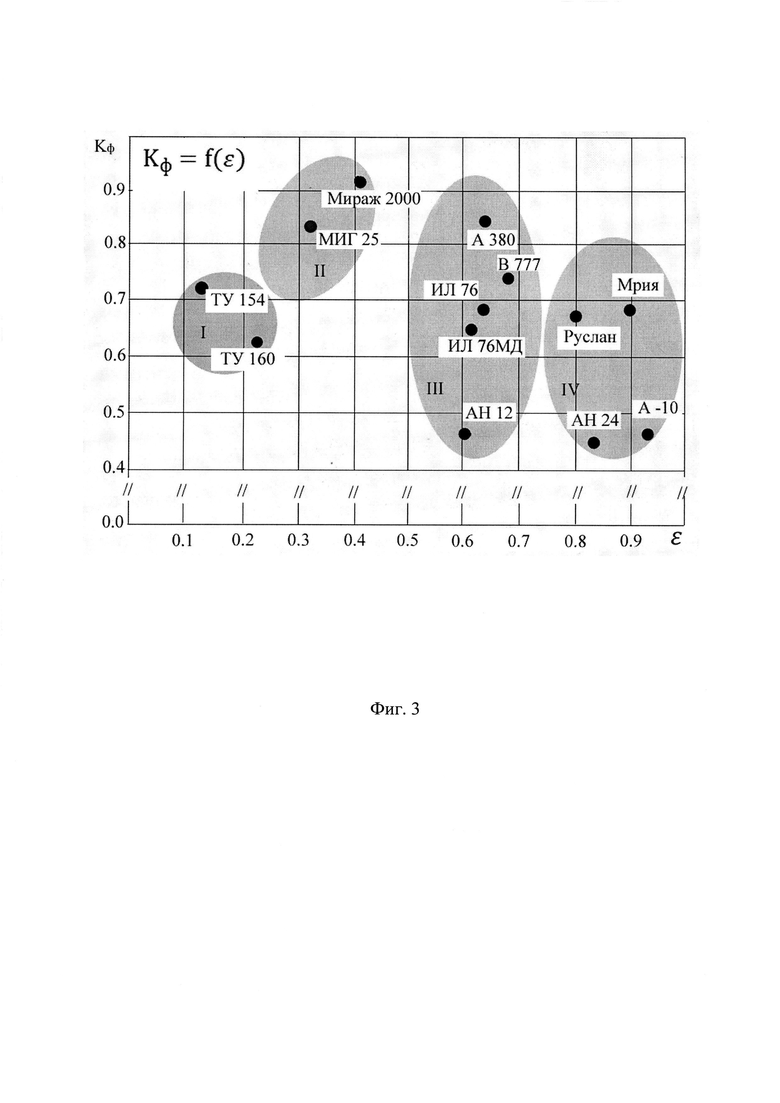
Фиг. 3. Значения коэффициента формы Kф различных типов воздушных судов. Эллипсами показаны области возможных значений других типов самолетов данного класса.
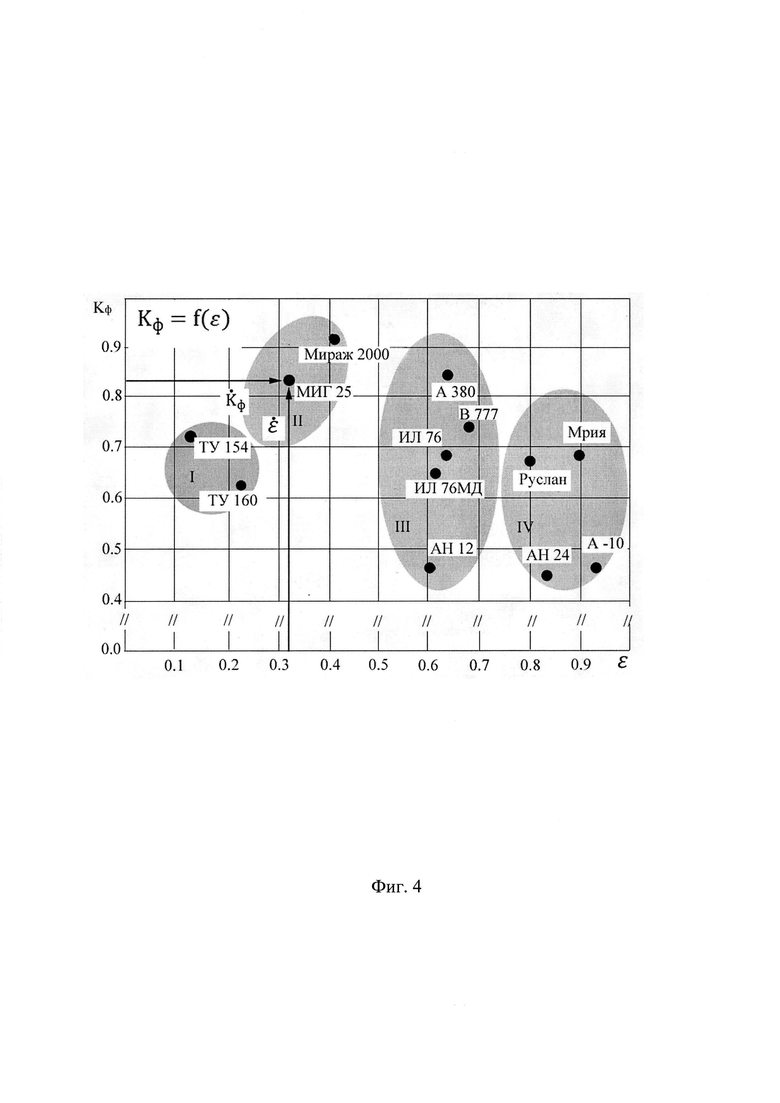
Фиг. 4. Алгоритм определения типа самолета по измеренным значениям коэффициента формы и эксцентриситета.
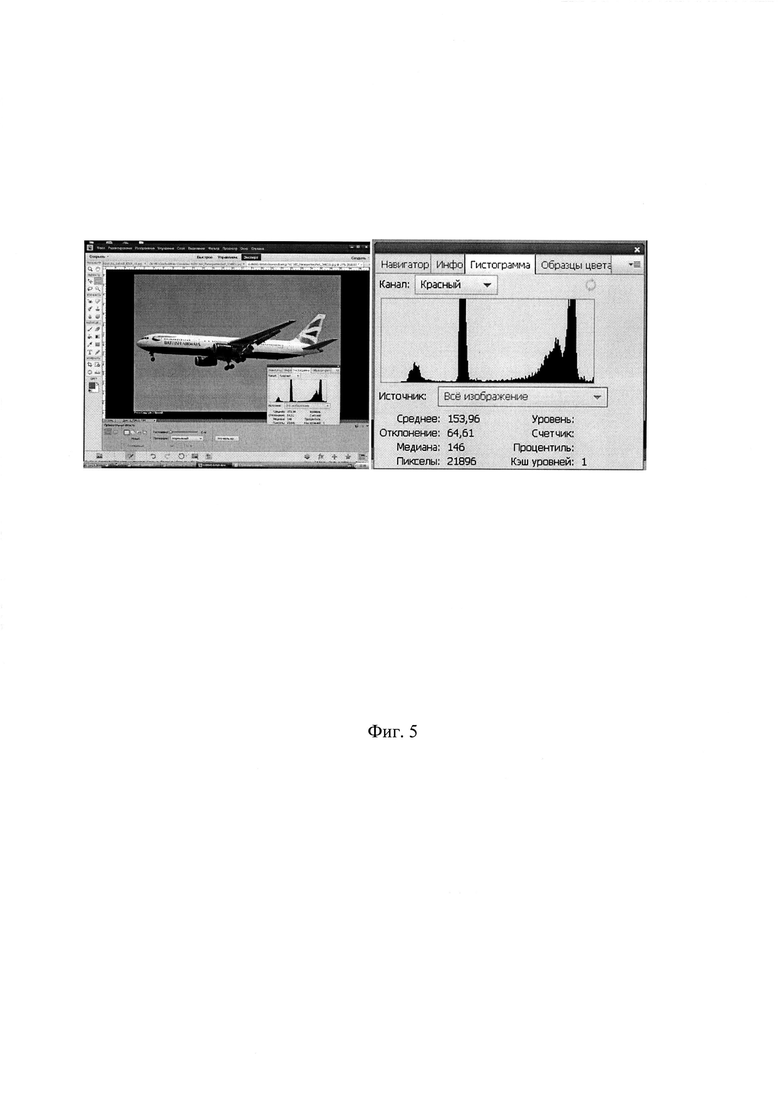
Фиг. 5. Изображение воздушного судна и гистограмма красного канала спектра раскраски его хвостового оперения.
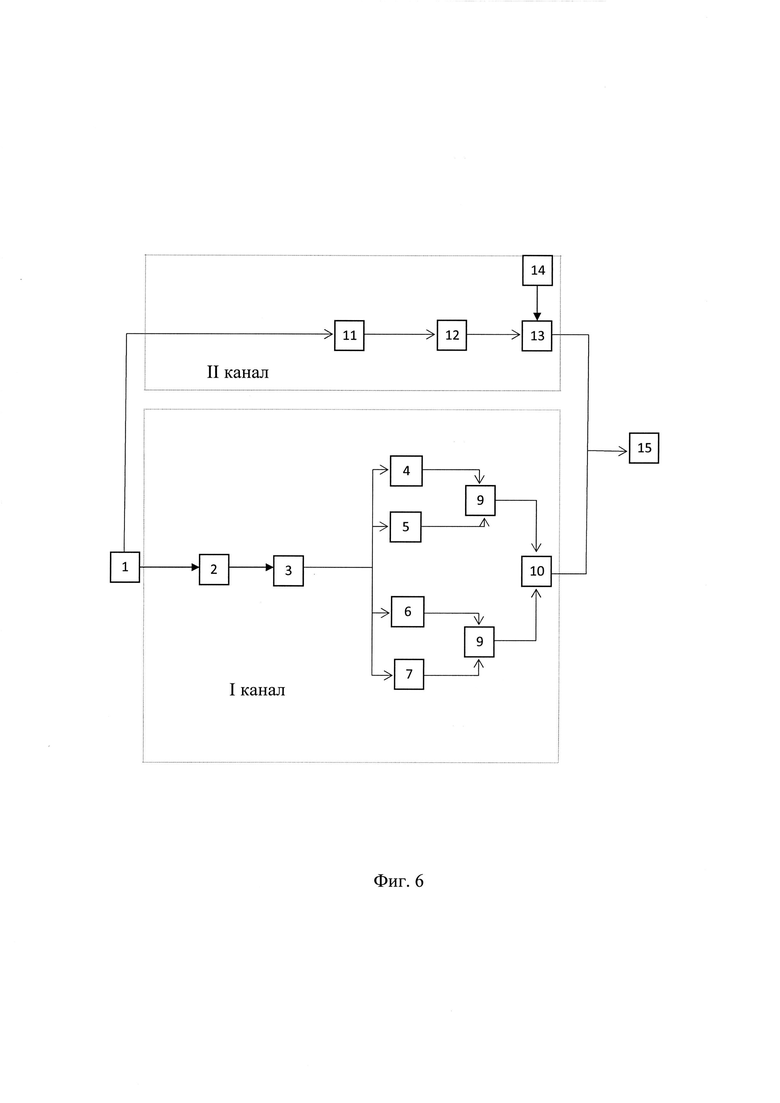
Фиг. 6. Устройство идентификации типа и государственной принадлежности воздушного судна.
1 - блок фотоприемного устройства, 2 - блок бинарного квантования интенсивности изображения, 3 - блок выделения области изображения, 4 - блок вычисления площади изображения, 5 - блок вычисления периметра изображения, 6 - блок вычисления ширины изображения, 7 - блок вычисления длины изображения, 8 - блок вычисления коэффициента формы изображения, 9 - блок вычисления эксцентриситета изображения, 10 - блок идентификации типа летательного аппарата, 11 - блок спектр анализаторов изображения, 12 - блок аппроксимации формы гистограммы изображения, 13 - блок идентификации государственной принадлежности воздушного судна, 14 - блок базы данных по гистограммам спектра изображений государственной принадлежности воздушных судов, 15 - блок индикации типа и государственной принадлежности воздушного судна.
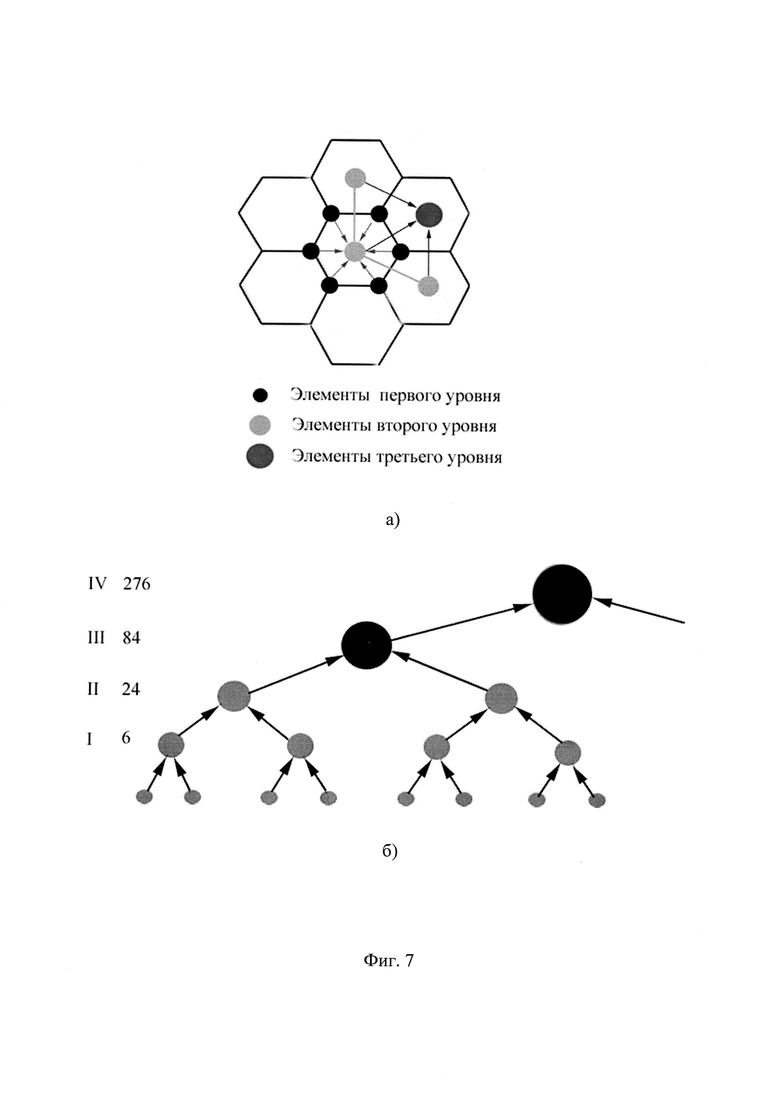
Фиг. 7. Многослойная структура элементов «ИЛИ» вычисления величины площади изображения: а) горизонтальный срез, б) вертикальный срез.
Заявляемый способ заключается в следующем.
Изображение с матричного фотоприемного устройства преобразуется в электрические сигналы и подвергается бинарному квантованию, в результате чего сигналы размещаются по строкам и столбцам в соответствии с геометрической структурой матричного фотоприемного устройства, образуя матрицу значений сигналов 0 или 1. Обработкой полученных информационных матриц программными, или аппаратными средствами, включающими последовательное использование булевой алгебры «И», реализующей логику: «1*1=1, 1*0=0, 0*1=0, 0*0=0», и булевой алгебры «ИЛИ», реализующей логику (три из трех): «1*1*1=1», «1*1*0=0», «1*0*1=0», «0*1*1=0», каждый сигнал с фотоэлемента преобразуется в информационную структуру с шестью «узловыми точками». Затем применением для полученной информационной структуры с шестью «узловыми точками» булевой алгебры «А», реализующей логику: «1*1=0, 1*0=1, 0*1=1, 0*0=0», восстанавливается область изображения и вычисляются площадь, периметр, длина и ширина изображения. Производится вычисление коэффициента формы изображения по формуле  где соответственно S - площадь, Р - периметр изображения, и вычисление эксцентриситета изображения по формуле
где соответственно S - площадь, Р - периметр изображения, и вычисление эксцентриситета изображения по формуле  где соответственно h - ширина, l - длина изображения.
где соответственно h - ширина, l - длина изображения.
Преобразование информационных матриц иллюстрируется Фиг. 1, 2.
На Фиг. 3 показаны значения Kф различных типов транспортных самолетов.
По имеющейся эталонной зависимости  геометрических форм самолетов производится идентификация типа воздушного судна. На Фиг. 4 показан алгоритм определения типа самолета по измеренным значениям коэффициента формы и эксцентриситета.
геометрических форм самолетов производится идентификация типа воздушного судна. На Фиг. 4 показан алгоритм определения типа самолета по измеренным значениям коэффициента формы и эксцентриситета.
Изображение с матричного фотоприемного устройства поступает также в блок спектральных анализаторов, содержащий три типа спектральных анализаторов в диапазонах спектра R, G, В (красный, зеленый, синий). Изображение воздушного судна и гистограмма красного канала спектра раскраски его хвостового оперения показаны на Фиг. 5. В блоке спектральных анализаторов формируются гистограммы распределения яркости изображения и осуществляется их аппроксимация в гистограмму изображения воздушного судна. Сравнением полученной гистограммы изображения воздушного судна с эталонными гистограммами воздушных судов различной государственной принадлежности, выполненными по раскраскам хвостового оперения и фюзеляжа, определяют государственную принадлежность воздушного судна.
Реализация заявляемого способа пассивной дистанционной телевизионной идентификации объектов осуществляется с помощью устройства Фиг. 6, состоящего из блока фотоприемного устройства 1; первого канала - канала идентификации типа воздушного судна, включающего блок бинарного квантования интенсивности изображения 2; блок выделения области изображения 3, блок вычисления площади изображения 4, блок вычисления периметра изображения 5, блок вычисления ширины изображения 6, блок вычисления длины изображения 7, блок вычисления коэффициента формы изображения 8, блок вычисления эксцентриситета изображения 9, блок идентификации типа летательного аппарата 10; второго канала - канала идентификации государственной принадлежности воздушного судна, включающего блок спектр анализаторов изображения 11, блок аппроксимации формы гистограммы изображения 12, блок идентификации государственной принадлежности воздушного судна 13, блок базы данных по гистограммам спектра изображений государственной принадлежности воздушных судов 14; блок индикации типа и государственной принадлежности воздушного судна 15.
Причем один выход блока фотоприемного 1 устройства соединен с входом блока бинарного квантования интенсивности изображения объекта, второй выход блока фотоприемного 1 устройства соединен с входом блока спектр анализаторов изображения 11, выход блока бинарного квантования интенсивности изображения 2 соединен с входом блока выделения области изображения 3, выход блока выделения области изображения 3 соединен с входами блока вычисления площади изображения 4, блока вычисления периметра изображения 5, блока вычисления ширины изображения 6 и блока вычисления длины изображения 7, выходы блоков блока вычисления площади изображения 4 и блока вычисления периметра изображения 5 соединены с входом блока вычисления коэффициента формы изображения 8, выходы блока вычисления ширины изображения 6 и блока вычисления длины изображения 7 соединены с входом блока вычисления эксцентриситета изображения 9, выходы блока вычисления коэффициента формы изображения 8 и блока вычисления эксцентриситета изображения 9 соединены с входом блока идентификации типа воздушного судна 10, выход блока идентификации типа воздушного судна соединен с одним из входов блока индикации типа и государственной принадлежности воздушного судна 15, выход блока спектр анализаторов 11 соединен с входом блока аппроксимации формы гистограммы изображения 12, выход блока аппроксимации формы гистограммы изображения 12 соединен с одним из входов блока идентификации государственной принадлежности воздушного судна 13, другой вход блока идентификации государственной принадлежности воздушного судна 13 соединен с выходом блока базы данных эталонных значений гистограмм спектра изображений государственной принадлежности воздушных судов 14, выход блока идентификации государственной принадлежности воздушных судов 13 соединен со вторым входом блока индикации типа и государственной принадлежности воздушного судна 15.
Устройство работает следующим образом.
Изображение с выхода блока матричного фотоприемного устройства 1, преобразованное в электрические сигналы, поступает на вход блока бинарного квантования 2. В блоке бинарного квантования сигналы размещаются по строкам и столбцам в соответствии с геометрической структурой матричного фотоприемного устройства, образуя матрицу значений сигналов 0 или 1. С выхода блока бинарного квантования 2 информация в виде информационной матрицы поступает в блок выделения области изображения 3. В блоке выделения области изображения 3 специальными аппаратными соединениями или программной обработкой выделяется область изображения. В аппаратном построении устройства блок выделения площади изображения 3 содержит один слой логических вычислительных элементов «И» и один слой элементов «ИЛИ» Фиг. 1. Элементы булевой алгебры «И» реализуют логику: «1*1=1, 1*0=0, 0*1=0, 0*0=0». Элементы булевой алгебры «ИЛИ» реализуют логику (три из трех): «1*1*1=1», «1*1*0=0», «1*0*1=0», «0*1*1=0». Если сигналы обнаружены в каждом из трех соседних элементов фотоприемной матрицы, то с помощью элементов «И» на каждой условной границе двух соседних элементов формируется сигнал на выходе элемента «И». Для того чтобы подтвердить обнаружение сигналов в трех элементах из трех и перенести сигнал в точку соединения трех элементов, используется элемент «ИЛИ». Выделение линии контура производится с помощью элементов булевой алгебры - несовпадения «А». Булева алгебра «А» реализует логику: «1*1=0, 1*0=1, 0*1=1, 0*0=0». Сигналы формируются на границах элементов в соответствии с геометрической структурой матрицы. С выхода блока выделения области изображения 3 сигналы поступают на входы блоков вычисления площади изображения 4, вход блока вычисления периметра изображения 5, вход блока вычисления ширины изображения 7 и вход блока вычисления длины изображения 8. В блоках вычисления площади изображения 4 и блока вычисления периметра изображения 5 каждый элемент блока объединяет сигналы с шести «узловых точек», сформированных в блоке выделения области изображения 3. В аппаратной реализации используется многослойная структура элементов «ИЛИ», представленная на Фиг. 7. С выходов блоков вычисления площади изображения 4 и блока вычисления периметра изображения 5 вычисленные значения площади и периметра изображения поступают на вход блока вычисления коэффициента формы изображения 8. Вычисление коэффициента формы изображения производится в блоке вычисления коэффициента формы изображения 8 по формуле:
 где соответственно S - площадь, Р - периметр изображения. Вычисленное значение коэффициента формы с выхода блока вычисления коэффициента формы изображения 8 поступает на первый вход блока идентификации типа воздушного судна 10.
где соответственно S - площадь, Р - периметр изображения. Вычисленное значение коэффициента формы с выхода блока вычисления коэффициента формы изображения 8 поступает на первый вход блока идентификации типа воздушного судна 10.
В блоке вычисления ширины изображения 6 и блоке вычисления длины изображения 7 производится формирование «цепочки» сигналов соответственно по направлению, перпендикулярному оси симметрии изображения и направлению оси симметрии изображения, сформированного в блоке выделения области изображения 3. С выходов блоков вычисления ширины изображения 6 и блока вычисления длины изображения 7 вычисленные значения площади и периметра изображения поступают на вход блока вычисления эксцентриситета изображения 9. В блоке вычисления эксцентриситета изображения 9 вычисление производится по формуле:
 где h - ширина, l - длина изображения соответственно. С выхода блока вычисления эксцентриситета изображения 9 вычисленное значение эксцентриситета поступает на второй вход блока идентификации типа воздушного судна 10. В блоке идентификации типа воздушного судна 10 изображения реализованы в зависимости
где h - ширина, l - длина изображения соответственно. С выхода блока вычисления эксцентриситета изображения 9 вычисленное значение эксцентриситета поступает на второй вход блока идентификации типа воздушного судна 10. В блоке идентификации типа воздушного судна 10 изображения реализованы в зависимости  в виде точечных значений для различных геометрических форм самолетов. На Фиг. 5 показаны значения Kф различных типов транспортных самолетов. Блок работает следующим образом. Сигналы с блоков вычисления коэффициента формы изображения 8 и вычисления эксцентриситета изображения 9 поступают на ортогонально расположенные линейки физических элементов в блоке идентификации типа воздушного судна 10. Число линеек определяется требуемой достоверностью идентификации типа воздушного судна. На Фиг. 5 представлены 10 уровней квантования. Каждая линейка горизонтальной или вертикальной полоски может быть выполнена на ферритовых кольцах. При этом при пересечении сигналов вертикального и горизонтального направления на выходном проводе ферритового кольца возникает импульс, позиционно соответствующий геометрическому образу. На электронном табло этот импульс высвечивает ячейку с надписью, например, ИЛ-76 или Боинг-747 и так далее. Блок спектральных анализаторов 11 содержит три типа спектральных анализаторов соответственно в диапазонах спектра R, G, В (красный, зеленый, синий). На вход блока спектральных анализаторов 11 с блока матричного фотоприемного устройства 1 поступает изображение воздушного судна. На выходе блока спектральных анализаторов 11 формируются гистограммы распределения яркости изображения по соответствующим уровням интенсивности и спектру, которые поступают на вход блока аппроксимации формы гистограммы изображения 12. С блока аппроксимации формы гистограммы изображения 12 гистограмма изображения поступает на вход блока идентификации государственной принадлежности воздушного судна 13. На другой вход блока идентификации государственной принадлежности воздушного судна 13 из блока базы данных по гистограммам спектра изображений государственной принадлежности воздушных судов 14 поступают эталонные значения гистограмм по раскраскам хвостового оперения и фюзеляжа. При совпадении формы гистограммы изображения с эталонной гистограммой коррелятор формирует сигнал «1», который высвечивает государственную принадлежность воздушного судна на электронном табло блока индикации типа и государственной принадлежности воздушного судна 15.
в виде точечных значений для различных геометрических форм самолетов. На Фиг. 5 показаны значения Kф различных типов транспортных самолетов. Блок работает следующим образом. Сигналы с блоков вычисления коэффициента формы изображения 8 и вычисления эксцентриситета изображения 9 поступают на ортогонально расположенные линейки физических элементов в блоке идентификации типа воздушного судна 10. Число линеек определяется требуемой достоверностью идентификации типа воздушного судна. На Фиг. 5 представлены 10 уровней квантования. Каждая линейка горизонтальной или вертикальной полоски может быть выполнена на ферритовых кольцах. При этом при пересечении сигналов вертикального и горизонтального направления на выходном проводе ферритового кольца возникает импульс, позиционно соответствующий геометрическому образу. На электронном табло этот импульс высвечивает ячейку с надписью, например, ИЛ-76 или Боинг-747 и так далее. Блок спектральных анализаторов 11 содержит три типа спектральных анализаторов соответственно в диапазонах спектра R, G, В (красный, зеленый, синий). На вход блока спектральных анализаторов 11 с блока матричного фотоприемного устройства 1 поступает изображение воздушного судна. На выходе блока спектральных анализаторов 11 формируются гистограммы распределения яркости изображения по соответствующим уровням интенсивности и спектру, которые поступают на вход блока аппроксимации формы гистограммы изображения 12. С блока аппроксимации формы гистограммы изображения 12 гистограмма изображения поступает на вход блока идентификации государственной принадлежности воздушного судна 13. На другой вход блока идентификации государственной принадлежности воздушного судна 13 из блока базы данных по гистограммам спектра изображений государственной принадлежности воздушных судов 14 поступают эталонные значения гистограмм по раскраскам хвостового оперения и фюзеляжа. При совпадении формы гистограммы изображения с эталонной гистограммой коррелятор формирует сигнал «1», который высвечивает государственную принадлежность воздушного судна на электронном табло блока индикации типа и государственной принадлежности воздушного судна 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ТИПА САМОЛЕТА СРЕДСТВАМИ ПАССИВНОЙ ОПТИЧЕСКОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2708346C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ДВИЖУЩЕГОСЯ ВОЗДУШНОГО ОБЪЕКТА МЕТОДОМ ПАССИВНОЙ ЛОКАЦИИ | 2016 |
|
RU2680265C2 |
| Цифровое устройство определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса | 2020 |
|
RU2746088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩИХСЯ ОБЪЕКТОВ МЕТОДОМ ПАССИВНОЙ ЛОКАЦИИ | 2014 |
|
RU2575471C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| СПОСОБ АДАПТИВНОЙ СПЕКТРАЛЬНОЙ СЕЛЕКЦИИ ЦЕЛЕЙ | 2015 |
|
RU2601284C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ЦЕНТРА ИЗОБРАЖЕНИЯ ОБЪЕКТА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2148248C1 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| СПОСОБ ИССЛЕДОВАНИЯ И ДИАГНОСТИКИ СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА ИЛИ ЕГО ЧАСТИ | 2010 |
|
RU2462195C2 |
| СПОСОБ ИССЛЕДОВАНИЯ И ДИАГНОСТИКИ СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА ИЛИ ЕГО ЧАСТИ | 2003 |
|
RU2295297C2 |
Изобретение относится к области анализа материалов с помощью оптических средств, а именно к способам пассивной дистанционной телевизионной идентификации объектов, и может быть использовано в системах идентификации типа и государственной принадлежности объектов, например воздушных судов в полете. Идентификация типа и государственной принадлежности воздушного судна в полете осуществляется по двум каналам: каналу идентификации типа воздушного судна по его геометрическим характеристикам и по каналу идентификации государственной принадлежности воздушного судна по раскраске хвостового оперения и фюзеляжа воздушного судна. В фотоприемном устройстве видеокадры изображения воздушного судна преобразуются в электрические сигналы и передаются в блок бинарного квантования электрических сигналов. С выхода блока бинарного квантования сигналы, преобразованные в информационные матрицы, поступают на вход блоков измерения геометрических характеристик изображения: площади, периметра, длины и ширины. Идентификация типа самолета осуществляется по его геометрическим характеристикам изображения: коэффициенту формы и эксцентриситету. Эксцентриситет изображения определяется отношением измеренных значений длины и ширины изображения - сторонами прямоугольной рамки, аппроксимирующей изображение. С выхода блока вычисления эксцентриситета вычисленное значение подается на вход блока идентификации типа воздушного судна. В блоке идентификации типа воздушного судна использованы аппаратные методы обработки информации на основе полученных зависимостей значений коэффициента формы изображения от его эксцентриситета. Технический результат - повышение достоверности идентификации типа и государственной принадлежности воздушного судна. 7 ил.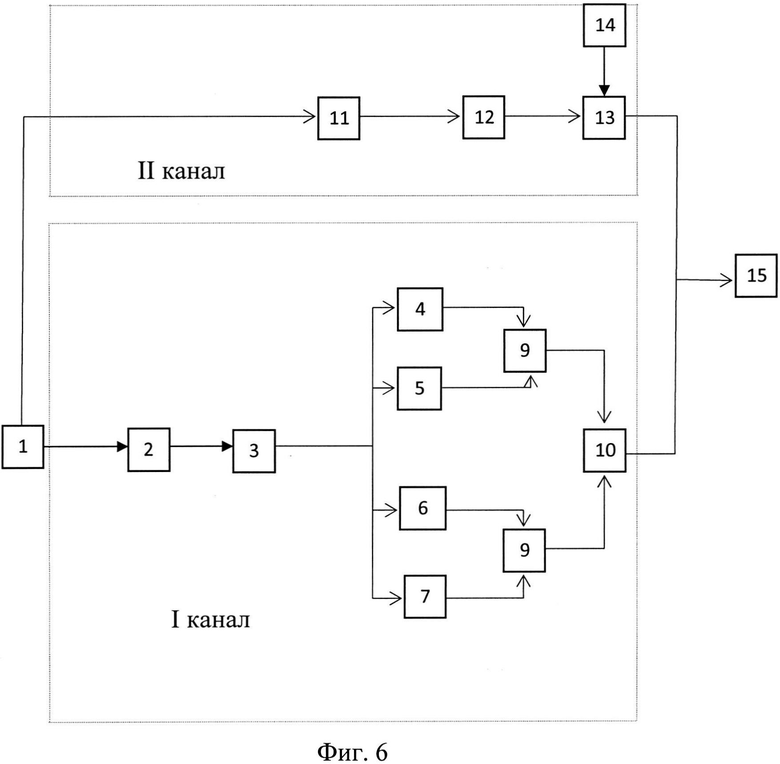
Устройство для пассивной дистанционной телевизионной идентификации объектов, включающее блок фотоприемного устройство, один выход которого соединен с входом блока бинарного квантования интенсивности изображения объекта, а второй - соединен с входом блока спектр анализаторов изображения, выход блока бинарного квантования интенсивности изображения соединен с входом блока выделения области изображения, выход блока выделения области изображения соединен с входами блока вычисления площади изображения, блока вычисления периметра изображения, блока вычисления ширины изображения и блока вычисления длины изображения, выходы блоков блока вычисления площади изображения и блока вычисления периметра изображения соединены с входом блока вычисления коэффициента формы изображения, выходы блока вычисления ширины изображения и блока вычисления длины изображения соединены с входом блока вычисления эксцентриситета изображения, выходы блока вычисления коэффициента формы изображения и блока вычисления эксцентриситета изображения соединены с входом блока идентификации типа воздушного судна, выход блока идентификации типа воздушного судна соединен с одним из входов блока индикации типа и государственной принадлежности воздушного судна, выход блока спектр анализаторов соединен с входом блока аппроксимации формы гистограммы изображения, выход блока аппроксимации формы гистограммы изображения соединен с одним из входов блока идентификации государственной принадлежности воздушного судна, другой вход блока идентификации государственной принадлежности воздушного судна соединен с выходом блока базы данных эталонных значений гистограмм спектра изображений государственной принадлежности воздушных судов, выход блока идентификации государственной принадлежности воздушных судов соединен со вторым входом блока индикации типа и государственной принадлежности воздушного судна.
| US 2012070078 A1, 22.03.2012 | |||
| Определение типа и государственной принадлежности воздушного судна в конфликтной ситуации, Военная мысль, 3, 2014 | |||
| US 4323880 A, 06.04.1982 | |||
| US 2015254279 A1, 10.09.2015. |

