Область техники
Изобретение относится к области пассивной оптической локации (G01S 17/46), конкретно к цифровым устройствам (G06N 7/04) для определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса.
Уровень техники
Известны пассивные оптические устройства измерения и распознавания характеристик воздушных объектов (ВО), содержащие инфракрасный пеленгатор кругового обзора и телевизионную фотокамеру (телекамеру) с длиннофокусным объективом (телескопом), соединенные по цифровым выходам с электронной вычислительной машиной (ЭВМ) управления и идентификации типа объектов. Инфракрасный пеленгатор обеспечивает скрытое обнаружения наземных и воздушных объектов (НВОБ) по их тепловому излучению и передает целеуказание обнаруженных объектов телекамере. По полученному целеуказанию объектив телекамеры фокусируется на НВОБ и увеличенное его изображение на фотоприемной матрице телекамеры, преобразуется в цифровую форму и передается на ЭВМ. По виду изображения объекта, размеру засветки и текущему её положению на фотоприемной матрице телекамеры ЭВМ производит идентификацию типа объекта и косвенное определение его пространственных координат, включая дальность, азимут и угол места.
Для регистрации отраженного от ВО излучения видимого диапазона используется телевизионная камера и соответствующий объектив, расположенный на опорно-поворотном устройстве (ОПУ), позволяющем осуществлять вращение линии визирования устройства по азимуту и углу места.
Недостатком известных устройств является невозможность определения углов псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ' ВО, приводящая к недостаточной точности определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса.
Желательно обеспечить возможность определения углов псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ' ВО.
Таких устройств в известном уровне техники не обнаружено.
Постановка задачи
Задачей изобретения является создание цифрового устройства (G06N 7/04) для определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса.
Техническим результатом, обеспечивающим решение этой задачи, является повышение точности определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса.
Сущность изобретения
Решение поставленной задачи и достижение заявленного технического результата обеспечивается тем, что цифровое устройство определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса содержит последовательно соединенные аналого-цифровой преобразователь (АЦП) 2 фоноцелевой обстановки (ФЦО) на фотоприемной матрице в цифровое изображение, блок сегментации изображения (БСИ) 7 ФЦО, блок определения границ ВО (БОГ) 8 на изображении ФЦО, блок вычисления параметров проекции ВО на изображении (БВП) 9 ВО, блок выбора параметров проекций ВО конкретного типа из базы данных (БВПВО) 11, блок анализа данных от внешних измерительных устройств и устранения неоднозначности определения параметров пространственной ориентации ВО (БАД) 13, блок определения параметров пространственной ориентации ВО (БОП) 15, блок формирования выходных данных о пространственной ориентации ВО (БФД) 16. Второй вход БОГ 8 соединен через блок детектирования ВО на изображении (БДИ) 5 с блоком эталонов классов ВО (БЭК) 3 и через блок идентификации типа ВО на изображении (БИТ) 6 с блоком эталонов типов ВО (БЭТ) 4, с БДИ 5 и вторым входом БВПВО 11. Третий вход, которого через блок параметров эталонных изображений проекций 3D-модели ВО (БДПЭ) 12 соединен с выходом виртуальной 3D-модели ВО (ВМ3д) 10. При этом второй вход БДИ 5 и третий вход БИТ 6 соединены между собой и с выходом АЦП 2, а второй вход БАД 13 соединен с выходом опорно-поворотного устройства ОПУ 14.
Достижение заявленного технического результата и поставленной задачи
Такая конструкция заявленного устройства позволяет определить углы псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ' ВО путем сопоставления параметров исследуемого изображения проекции ВО на ФМ с параметрами эталонных изображений, хранящимися в заранее подготовленной базе данных, содержащей полную информацию о пространственной ориентации ВО и достичь заявленного технического результата. Это позволяет повысить точность определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса.
Сущность изобретения поясняется чертежами
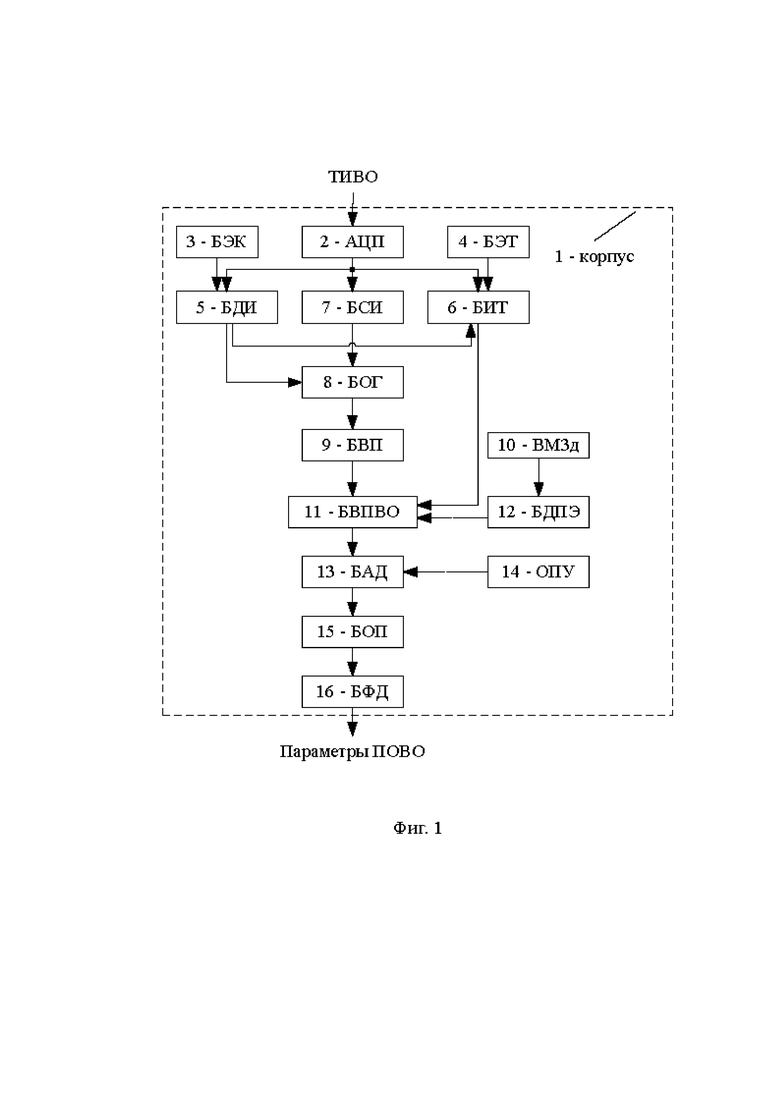
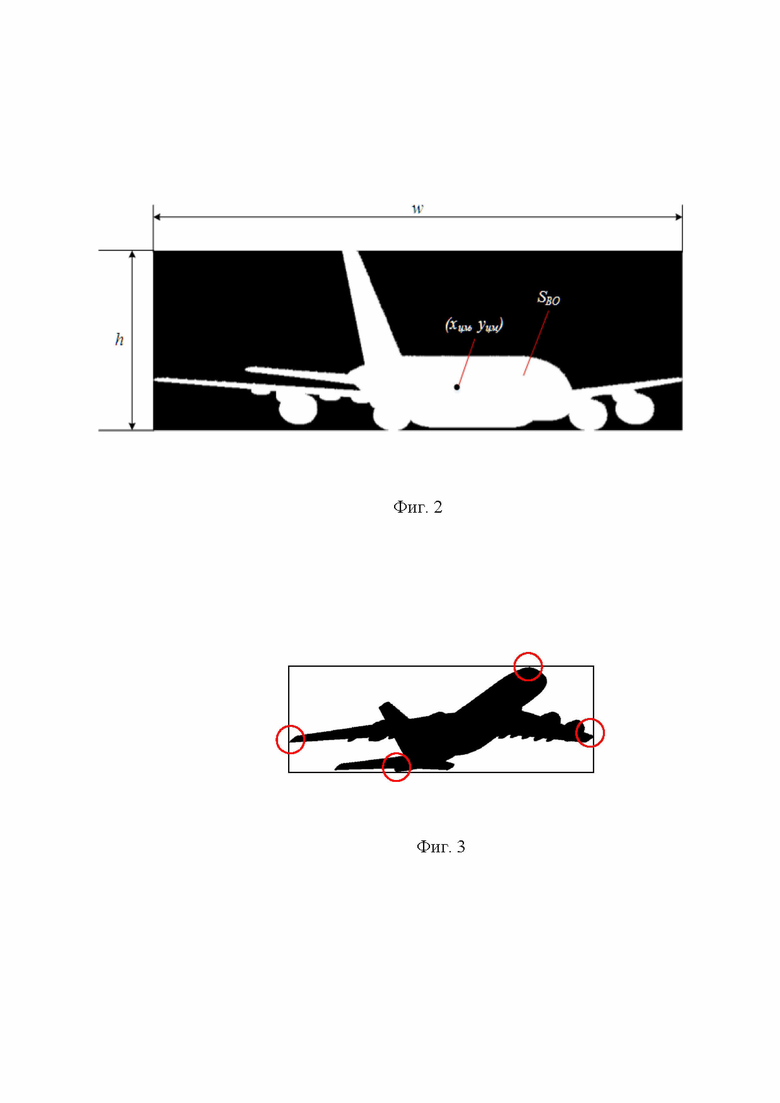
На фиг. 1 представлена функциональная схема определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса, на фиг. 2 – обозначение исследуемых параметров изображения проекции ВО, на фиг. 3 – обозначение граничных точек проекции ВО на изображении.
На фиг. 1 обозначены:
1 – корпус цифрового устройства определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса;
2 – аналого-цифровой преобразователь (АЦП) оптического изображения фотоприемной матрицы в цифровое изображение;
3 – блок эталонов классов ВО (БЭК);
4 – блок эталонов типов ВО (БЭТ);
5 – блок детектирования ВО на изображении (БДИ);
6 – блок идентификации типа ВО на изображении (БИТ);
7 – блок сегментации изображения (БСИ);
8 – блок определения границ ВО на изображении (БОГ);
9 – блок вычисления параметров проекции ВО на изображении (БВП);
10 – виртуальная 3D-модель ВО (ВМ3д);
11 – блок выбора параметров ВО конкретного типа из базы данных (БВПВО);
12 – блок параметров эталонных изображений проекций 3D-модели ВО (БДПЭ);
13 – блок анализа данных от внешних измерительных устройств и устранения неоднозначности определения параметров пространственной ориентации ВО (БАД);
14 – опорно-поворотное устройство (ОПУ);
15 – блок определения параметров пространственной ориентации ВО (БОП);
16 – блок формирования выходных данных (БФД) о пространственной ориентации ВО.
Раскрытие сущности изобретения
Согласно фиг. 1 цифровое устройство определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса содержит корпус 1. Внутри корпуса 1 последовательно установлены аналого-цифровой преобразователь (АЦП) 2 фоноцелевой обстановки (ФЦО) на фотоприемной матрице в цифровое изображение, блок сегментации изображения (БСИ) 7 ФЦО, блок определения границ ВО (БОГ) 8 на изображении ФЦО, блок вычисления параметров проекции ВО на изображении (БВП) 9 ВО, блок выбора параметров проекций ВО конкретного типа из базы данных (БВПВО) 11, блок анализа данных от внешних измерительных устройств и устранения неоднозначности определения параметров пространственной ориентации ВО (БАД) 13, блок определения параметров пространственной ориентации ВО (БОП) 15, блок формирования выходных данных о пространственной ориентации ВО (БФД) 16. Второй вход БОГ 8 соединен через блок детектирования ВО на изображении (БДИ) 5 с блоком эталонов классов ВО (БЭК) 3 и через блок идентификации типа ВО на изображении (БИТ) 6 с блоком эталонов типов ВО (БЭТ) 4, с БДИ 5 и вторым входом БВПВО 11. Третий вход которого через блок параметров эталонных изображений проекций 3D-модели ВО (БДПЭ) 12 соединен с выходом виртуальной 3D-модели ВО (ВМ3д) 10. При этом второй вход БДИ 5 и третий вход БИТ 6 соединены между собой и с выходом АЦП 2, а второй вход БАД 13 соединен с выходом опорно-поворотного устройства ОПУ 14.
При этом БДИ 5, БИТ 6 выполнены в виде блоков цифровой свертки входных сигналов на основе модифицированных архитектур нейросети ResNet-50 и AlexNet соответственно, а БСИ – в виде блока цифровой свертки с U-net архитектурой. Нейросеть в БДИ 5 предварительно обучается на изображениях ВО из БЭК 3, нейросеть в БИТ 6 – на изображениях из БЭТ 4.
БВП 9 выполнен в виде блока вычислителей параметров прямоугольного бинарного изображения проекции ВО на его поперечное сечение, включающего вычислитель доли площади проекции SВОд на изображении ВО, вычислитель положения центра масс площади проекции SВО относительно ширины изображения ВО, вычислитель положение центра масс площади проекции SВО относительно высоты изображения, вычислитель отношения ширины изображения к высоте изображения ВО, вычислитель координат граничных точек проекции на изображении ВО. БДПЭ 12 выполнен в виде вычислителя реляционного типа для определения углов псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ' ВО. ВМ3д 10 выполнена в формате OBJ. БЭК 3, БЭТ 4 и БДПЭ 12 выполнены в виде блоков памяти типа HDD/SSD. Все элементы 1–16 цифрового устройства определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса выполнены на цифровых интегральных микросхемах.
Работа цифрового устройства
Работа цифрового устройства определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса состоит в следующем. На вход АЦП 2 с выхода фотоприемной матрицы пассивного оптико-электронного комплекса поступает аналоговое изображение фоноцелевой обстановки (ФЦО). АЦП 2 преобразует аналоговое изображение ФЦО в цифровую форму. С выхода АЦП 2 цифровое изображение ФЦО одновременно подается на БДИ 5, БСИ 7 и БИТ 6. БДИ 5 осуществляет детектирование ВО на кадре, БСИ 7 – идентификацию типа ВО, БДИ 5 – сегментацию изображения ФЦО. Принцип работы этих программных блоков основан на использовании алгоритмов сверточных нейронных сетей для решения указанных задач. В БДИ 5 и БИТ 6 используется модифицированная архитектура нейросети ResNet-50 и AlexNet, в БСИ используется сеть с U-net архитектурой. Результатом работы БДИ 5 является выделение на изображении ФЦО, сформированном на АЦП 2, проекции ВО и определение координат его положения на ФЦМ (в пикселях). Полученная в ходе детектирования ВО информация используется в работе БИТ 6 и БСИ 7 путем учета положения ВО в координатах изображения. БЭК 3 и БЭТ 4 содержат изображения ВО для создания карт отличительных признаков ВО, которые используются в работе нейросетей в БДИ 5 и БИТ 6. Результатом работы БИТ 6 является информация о типе обнаруженного на изображении ВО. Информация о типе ВО является первичным ключом базы данных реляционного типа БДПЭ 12.
В БСИ 7 осуществляется сегментация этого изображения ФЦО. Далее сегмент проекции ВО на этом изображении заполняется, например, белым цветом, а оставшийся фон вокруг нее – черным. Результатом работы БСИ 7 является формирование бинаризированного изображения ФЦО. Полученное в БСИ 7 изображение подается на вход БОГ 8. Где с учетом информации от БДИ 5 формируется прямоугольное бинарное изображение проекции ВО, ограниченное по его крайним точкам (фиг. 2). Полученное изображение проекции подается на вход БВП 9, где производится расчет его параметров, а именно:
1) доля площади проекции ВО SВОд на изображении:
где SВО (%) – количество пикселей, занимаемых ВО на изображении, w (пикс) и h (пикс) – ширина и высота изображения проекции ВО (фиг. 2);
2) относительные коэффициенты, характеризующие:
– положение центра масс площади проекции SВО относительно ширины изображения:
– положение центра масс площади проекции SВО относительно высоты изображения:
– отношение ширины изображения к высоте:
где xцм (пикс) и yцм (пикс) – координаты центра масс площади ВО на изображении (фиг. 2);
3) координаты граничных точек проекции ВО на изображении (фиг. 3) относительно высоты изображения слева (Lh), справа (Rh) и относительно ширины сверху (Uw), снизу (Dw), а точнее их относительное коэффициенты, определяемые по следующим формулам:
В работе БВПВО 11 используется заранее подготовленная база данных параметров эталонных бинарных изображений проекций ВО – БДПЭ 12, полученная с использованием точной виртуальной 3D-модели ВО ВМ3д 10. С помощью специализированного ПО производится вращение ВМ3д 10 по углам рыскания, тангажа и крена с заданным шагом. В БДПЭ 12 реляционного типа заносится информация о параметрах пространственной ориентации ВМ3д в системе координат относительно линии визирования ФМ (определяются углы псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ') и соответствующие этому положению параметры изображения ее проекции (1) – (8). Таким образом подготавливаются данные для БДПЭ 12 для различных типов ВО. Параметры изображения проекции ВО на ФМ, вычисленные в БВП, и параметры эталонных изображений виртуальной 3D-модели ВО, полученные из БДПЭ 12 с учетом информации от БИТ 6 поступают в БВПВО 11. В этом блоке по первичному ключу (тип конкретного ВО) и по вторичному ключу (параметры проекции ВО на изображении) из БДПЭ 12 выбираются углы псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ', соответствующие конкретной пространственной ориентации ВО относительно линии визирования ФМ. Результатом работы БАД 13 является устранение неоднозначности определения параметров пространственной ориентации ВО. Эта задача решается путем учета данных, получаемых от датчиков азимутального и угломестного двигателей ОПУ 14, а также динамики данных о параметрах изображения проекции ВО на ФМ от БВП 9. Результаты работы БАД 13 передаются в БОП 15, где определяются окончательные значения параметров пространственной ориентации ВО. Полученная информация о параметрах пространственной ориентации ВО передается в блок БФД 16 для перевода их в требуемый формат и дальнейшей передачи в другие узлы системы.
Промышленная применимость
Изобретение разработано на уровне технического предложения и математической модели устройства определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса. Испытания модели показали реализуемость предлагаемого устройства и достижение заявленного технического результата за счет сопоставления параметров исследуемого изображения проекции ВО на ФМ с параметрами эталонных изображений, хранящимися в заранее подготовленной базе данных, которая содержит полную информацию о пространственной ориентации ВО и за счет полного исключения влияния человеческого фактора – процесс определения параметров пространственной ориентации полностью автоматизирован.
Источники информации
1. RU 2352480, 24.07.2007.
2. RU 2530185, 10.10.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2745304C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ СЛАБОИЗЛУЧАЮЩИХ ПОДВИЖНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ НА ПРОСТРАНСТВЕННО-НЕОДНОРОДНОМ ФОНЕ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2013 |
|
RU2536082C1 |
| Определитель параметров ветра бесконтактный пассивный | 2024 |
|
RU2839260C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| Оптико-электронное устройство для дешифрирования фотоизображения системы поиска и разведки природных ресурсов | 1989 |
|
SU1659742A1 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
Изобретение относится к устройствам для определения пространственной ориентации воздушного объекта. Технический результат заключается в повышении точности определения пространственной ориентации воздушного объекта относительно пассивного оптико-электронного комплекса. Устройство содержит аналого-цифровой преобразователь, блок сегментации изображения, блок определения границ на изображении, блок вычисления параметров проекции на изображении, блок выбора параметров проекций конкретного типа из базы данных, блок анализа данных от внешних измерительных устройств и устранения неоднозначности определения параметров пространственной ориентации, блок определения параметров пространственной ориентации, блок формирования выходных данных о пространственной ориентации. 6 з.п. ф-лы, 3 ил.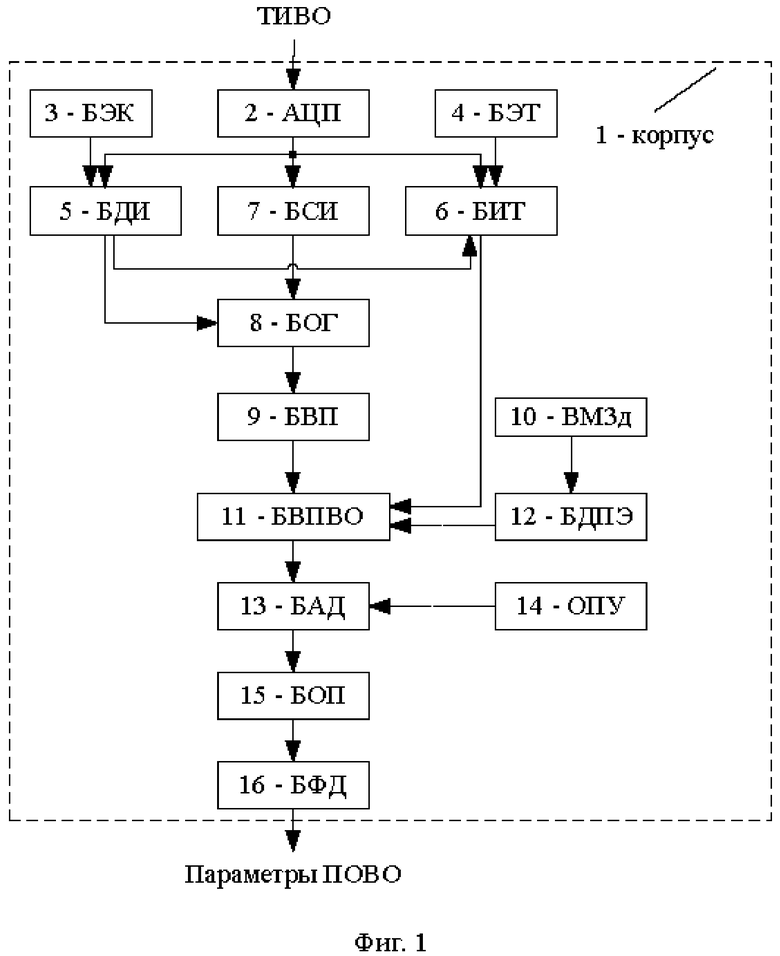
1. Цифровое устройство определения пространственной ориентации воздушного объекта (ВО) относительно пассивного оптико-электронного комплекса, характеризующееся тем, что оно содержит последовательно соединенные аналого-цифровой преобразователь (АЦП) фоноцелевой обстановки (ФЦО) на фотоприемной матрице в цифровое изображение, блок сегментации изображения (БСИ) ФЦО, блок определения границ (БОГ) ВО на изображении ФЦО, блок вычисления параметров проекции ВО на изображении (БВП) ВО, блок выбора параметров проекций ВО (БВПВО) конкретного типа из базы данных, блок анализа данных (БАД) от внешних измерительных устройств и устранения неоднозначности определения параметров пространственной ориентации ВО, блок определения параметров (БОП) пространственной ориентации ВО, блок формирования выходных данных (БФД) о пространственной ориентации ВО, второй вход БОГ соединен через блок детектирования ВО на изображении (БДИ) с блоком эталонов классов (БЭК) ВО и через блок идентификации типа (БИТ) ВО на изображении с блоком эталонов типов (БЭТ) ВО, с вторыми входами БДИ, БСИ и БВПВО, третий вход которого через блок параметров эталонных изображений (БДПЭ) проекций 3D-модели ВО соединен с выходом виртуальной 3D-модели ВО (ВМ3д), причем второй вход БДИ и третий вход БИТ соединены между собой и с выходом АЦП, а второй вход БАД соединен с выходом опорно-поворотного устройства ОПУ.
2. Цифровое устройство по п. 1, отличающееся тем, что БДИ, БИТ выполнены в виде блоков цифровой свертки входных сигналов на основе модифицированных архитектур нейросети ResNet-50 и AlexNet соответственно, а БСИ – в виде блока цифровой свертки с U-net архитектурой.
3. Цифровое устройство по п. 1, отличающееся тем, что БВП выполнен в виде блока вычислителей параметров прямоугольного бинарного изображения проекции ВО на его поперечное сечение, включающего вычислитель доли площади проекции SВОд на изображении проекции ВО, вычислитель положения центра масс площади проекции SВО относительно ширины изображения проекции ВО, вычислитель положения центра масс площади проекции SВО относительно высоты изображения проекции ВО, вычислитель отношения ширины изображения к высоте изображения проекции ВО, вычислитель координат граничных точек проекции ВО на изображении.
4. Цифровое устройство по п. 1, отличающееся тем, что БДПЭ выполнен в виде вычислителя реляционного типа для определения углов псевдотангажа θ', псевдокрена φ' и псевдорыскания ψ' ВО.
5. Цифровое устройство по п. 1, отличающееся тем, что ВМ3д выполнена в формате OBJ.
6. Цифровое устройство по п. 1, отличающееся тем, что БЭК, БЭТ и БДПЭ выполнены в виде блоков памяти типа HDD/SSD.
7. Цифровое устройство по п. 1, отличающееся тем, что его элементы (1-16) выполнены на цифровых интегральных микросхемах.
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2352480C1 |
| US 4660044, 21.04.1987 | |||
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| Устройство для изменения шага винта | 1943 |
|
SU67529A1 |

