Изобретение относится к области распознавания показаний стрелочных приборов, а именно к способам автоматического считывания показаний со стрелочных приборов, снабженных шкалой (манометры, микрометры, термометры, анемометры и т.п.). Изобретение может быть использовано при поверке стрелочных приборов, а также в различных отраслях промышленности, где они используются для отображения протекающих процессов.
В настоящее время массовый выпуск стрелочных приборов достигает значительных объемов, данный факт обусловлен тем, что такие приборы обладают высокой точностью, а их конструкция довольно проста и достаточно надежна. Однако при эксплуатации таких приборов возникают определенные сложности, такие как: необходимость периодических поверок и погрешность, связанная с особенностями визуального восприятия показаний прибора (например, выведение среднего значения при нахождении стрелки между делениями шкалы, либо искажение значений, отображаемых прибором при наблюдении за показаниями под углом к циферблату, и т.п.).
Для упрощения процесса проведения поверок и ликвидации вышеуказанных погрешностей в последнее время прибегают к разработке технических решений, позволяющих с высокой точностью считывать показания стрелочных приборов.
Известен способ автоматического считывания показаний стрелочного прибора из описания изобретения под названием «Устройство для автоматического съема показаний индикаторов часового типа» [Авторское свидетельство СССР №515036, G01D 13/26, опубл. 25.05.1976].
Согласно известному способу автоматическое считывание показаний стрелочного прибора заключается в том, что создают модель прибора, с которого предполагается считывание показаний, распознают положение стрелки прибора, после чего вычисляют значение, отображаемое прибором.
Положение стрелки в известном способе распознают по значению напряжения, которое зависит от местоположения ползунка относительно потенциометрических полуколец. Значение напряжения определяют с помощью измерительного устройства, подключенного к ползунку, закрепленному на стрелке, и потенциометрическим полукольцам, подключенным к источнику питания и закрепленным на шкале прибора. Модель прибора создают в виде диаграммы значений напряжений, записанных измерительным устройством, в результате поворота стрелки с ползунком, и значений прибора, соответствующих этим углам поворота.
Данный способ позволяет довольно точно считывать показания стрелочного прибора, однако этот способ предполагает дополнение конструкции прибора ползунком и потенциометрическими полукольцами, причем установка этих элементов должна быть осуществлена с высокой точностью и надежностью крепления. Кроме того, измерительная схема, реализующая этот способ, предполагает наличие измерительного устройства, обладающего собственной погрешностью, которая может негативно сказаться на значении погрешности считывания показаний стрелочного прибора.
Известен способ автоматического считывания показаний стрелочного прибора из статьи под названием «Система автоматического контроля и управления на основе распознавания показаний на средствах визуализации аналоговых приборов» [Овсянников А.В., Тезисы доклада на международной научно-технической конференции «автоматический контроль и автоматизация производственных процессов», БГТУ, Минск, 2008. С. 56-63].
Согласно известному способу считывание показаний стрелочного прибора, заключается в том, что в памяти электронно-вычислительного устройства создают модель прибора, с которого предполагается считывание показаний, при помощи устройства регистрации изображений получают цифровое изображение прибора в момент отображения показаний, затем при помощи созданной модели распознают положение элемента шкалы, соответствующего нулевому значению прибора, после этого распознают положение стрелки прибора и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором.
Модель прибора в этом способе создают в виде изображений прибора, на одном из которых стрелка указывает на элемент шкалы, соответствующий минимальному значению прибора, а на другом - на элемент шкалы, соответствующий максимальному значению прибора. Далее из этих изображений получают разностное и суммарное изображения, после чего определяют изображение шкалы путем вычитания разностного изображения из суммарного. Затем определяют положение стрелки прибора путем вычитания изображения шкалы из изображения прибора, в момент отображения показаний, полученного при помощи устройства регистрации изображений. После определения положения стрелки определяют значение углового расстояния, на которое она удалена от элементов, соответствующих минимальному и максимальному значениям прибора. После чего при помощи специальной формулы переводят значение углового расстояния в значение, отображаемое прибором.
Данный способ, в отличие от предыдущего аналога, не требует внесения дополнений в конструкцию прибора, кроме того при его реализации не задействованы дополнительные измерительные устройства, за счет чего этот способ позволяет более точно определять показания стрелочных приборов без внесения изменений в их конструкцию. Однако получение изображений, на которых стрелка прибора указывает на элементы шкалы, соответствующие минимальному и максимальному значениям прибора, требует довольно точной установки стрелки на эти элементы. Это приводит к наличию дополнительных операций и зависимости точности считывания от точности установки стрелки, что в итоге влияет на точность и осложняет процесс считывания показаний стрелочных приборов. Кроме того, использование этого способа для считывания показаний приборов с замкнутой (круговой) шкалой может быть ограничено. Связано это с тем, что при реализации способа требуются два изображения прибора, на которых стрелка указывает на минимальное и максимальное значение прибора. В случае с приборами с замкнутой (круговой) шкалой минимальное и максимальное значения прибора будут находиться в одной и той же точке, а изображения, полученные в соответствии с данным способом, будут одинаковыми, вследствие чего возникает вероятность того, что без наличия отличающегося изображения способ не сможет быть реализован.
Известен способ автоматического считывания показаний стрелочного прибора из статьи под названием «Считывание показаний стрелочного прибора при помощи web-камеры» [Волегов Д.Б., Юрин Д.В. // Тезисы 18-ой международной конференции по компьютерной графике и ее приложениям GraphiCon 2008. - GraphiCon - Москва, 2008. - С. 242-247].
Согласно известному способу считывание показаний стрелочного прибора заключается в том, что в памяти электронно-вычислительного устройства создают модель прибора, с которого предполагается считывание показаний, при помощи устройства регистрации изображений получают цифровое изображение прибора в момент отображения показаний, затем на электронно-вычислительном устройстве производят фильтрацию полученного изображения, определяют положение прибора и при помощи созданной модели распознают положение элемента шкалы, соответствующего нулевому значению прибора, после этого распознают положение стрелки прибора и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором.
Модель прибора создают в виде изображения его шкалы и стрелки, указывающей на элемент шкалы, соответствующий нулевому значению. Фильтрацию изображения производят путем применения к цветовым каналам изображения аффинных преобразований. Определение положения прибора производят путем проведения проективного преобразования, совмещающего текущее изображение с изображением шкалы прибора. Из преобразованного изображения получают изображение стрелки путем вычитания из него изображения шкалы прибора. Для полученного изображения стрелки и изображения стрелки, указывающей на элемент шкалы, соответствующий нулевому значению, вычисляют контурное изображение при помощи алгоритма поиска краев на изображении, далее преобразовывают полученные изображения в полярную систему координат при помощи билинейной интерполяции и проводят вычисление свертки столбцов изображений при помощи преобразования Хартли. Свертку интегрируют по строкам и определяют максимум, по которому вычисляют угловое расстояние, на которое отклонена стрелка. Затем при помощи калибровочной таблицы переводят значение углового расстояния в значение, отображаемое прибором.
В отличие от предыдущих аналогов указанный способ не требует внесения дополнений в конструкцию прибора, не задействует при реализации дополнительные измерительные устройства, не требует дополнительных операций по установке стрелки в конкретных положениях, в результате чего позволяет с меньшими затратами получать более точные результаты считывания показаний стрелочного прибора.
Данный способ выбран в качестве прототипа, так как он обладает наиболее близкой совокупностью общих признаков с заявляемым способом.
Недостатком данного способа можно считать то, что точность данного способа зависит от искажения изображения, полученного при помощи устройства регистрации. Возникновение такого искажения возможно в результате смещения оптической оси устройства регистрации относительно геометрического центра прибора, а зависимость точности способа от искажения изображения объясняется тем, что при искажении изображения искажается и значение углового расстояния между стрелкой и элементом шкалы, соответствующим нулевому значению, по которому определяется считываемое значение прибора. Таким образом, получаем, что данный способ позволяет достигать высокой точности считывания показаний стрелочного прибора, при отсутствии смещения оптической оси устройства регистрации относительно геометрического центра прибора, то есть при наличии дополнительных операций, которые увеличивают трудоемкость способа.
Анализ известных способов автоматического считывания показаний стрелочных приборов позволяет сделать вывод, что существующий уровень техники не обеспечивает создания способа, позволяющего с минимальными трудозатратами достигать высокой точности считывания показаний стрелочных приборов.
Задачей данного изобретения является создание способа, позволяющего с высокой точностью считывать показания стрелочных приборов и исключить наличие дополнительных операций.
Техническим результатом изобретения является снижение трудозатрат при сохранении точности считывания, достигаемое за счет использования для определения считываемого показания прибора, значений расстояний между элементом шкалы, соответствующим нулевому значению, и элементами шкалы, между которыми расположена стрелка при отображении значения.
Для получения указанного технического результата в памяти электронно-вычислительного устройства создают модель прибора, с которого предполагается считывание показаний, при помощи устройства регистрации изображений получают изображение прибора в момент отображения показаний, затем на электронно-вычислительном устройстве производят фильтрацию полученного изображения, определяют положение прибора и при помощи созданной модели распознают положение элемента шкалы, соответствующего нулевому значению прибора, после этого распознают положение стрелки прибора и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором, согласно изобретению модель прибора создают в виде элементов шкалы и соответствующих им значений, с помощью созданной модели, после распознавания элемента шкалы, соответствующего нулевому значению прибора, производят распознавание элементов шкалы, между которыми располагается стрелка прибора в момент отображения показаний, а также соответствующих им значений, после этого определяют значения расстояний между элементом шкалы, соответствующим нулевому значению прибора, и элементами шкалы, соответствующими значениям, между которыми располагается стрелка прибора в момент отображения показаний, далее по полученным значениям и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором.
Заявляемый способ содержит признаки, отличающие его от наиболее близких аналогов, что позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
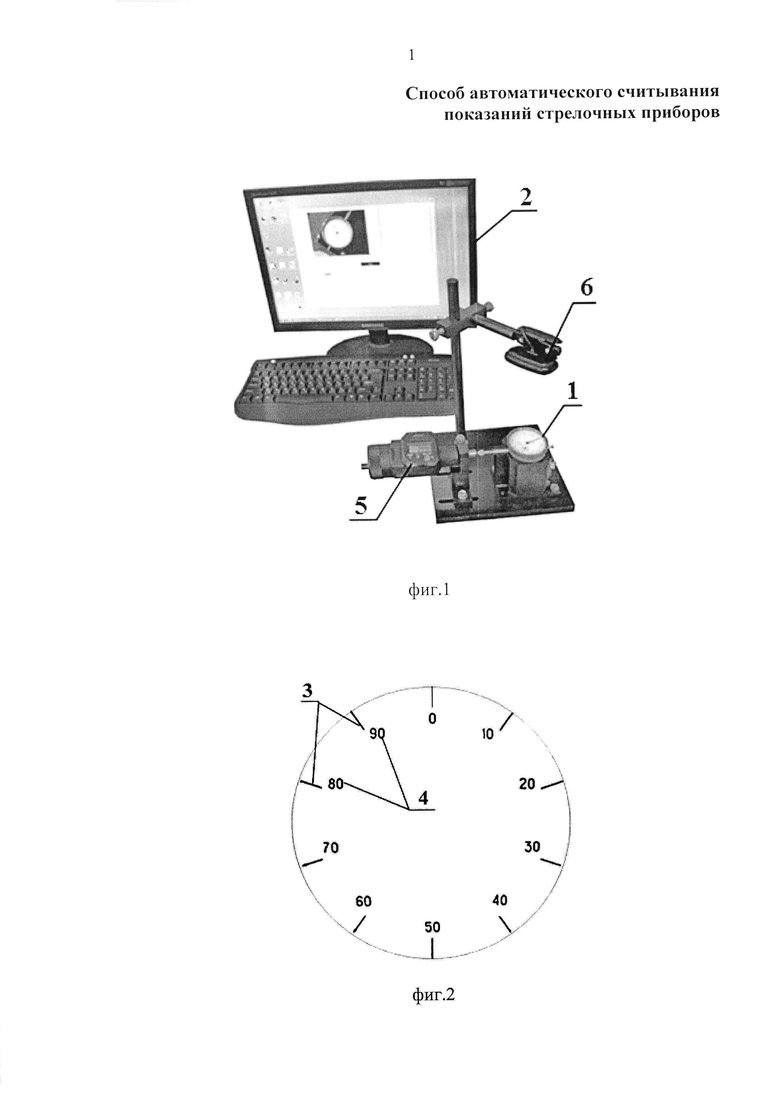
На фиг. 1 показано устройство, реализующее способ.
На фиг. 2 показана модель прибора.
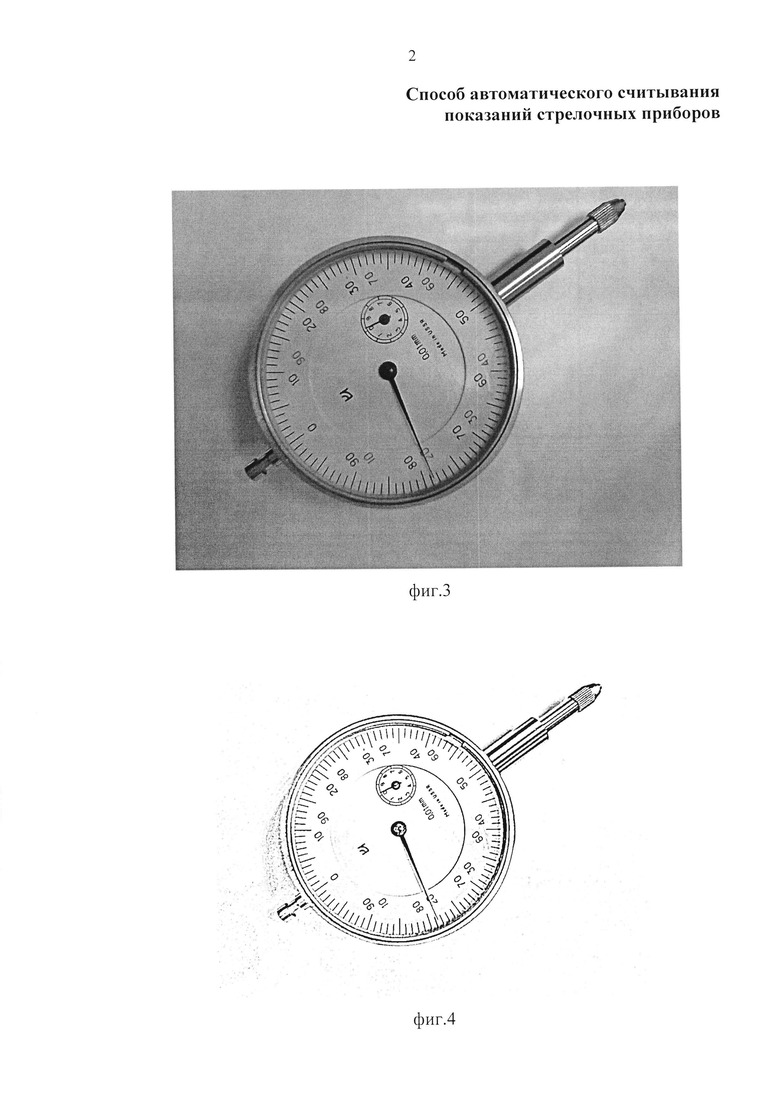
На фиг. 3 показано исходное изображение прибора.
На фиг. 4 показано отфильтрованное изображение прибора.
На фиг. 5 показана схема распознавания элементов прибора.
На фиг. 6 показаны угловые расстояния между элементами прибора.
Для осуществления способа автоматического считывания показаний стрелочного прибора 1 (фиг. 1) в памяти электронно-вычислительного устройства 2 создают модель этого прибора (фиг. 2). Модель прибора 1 создают в виде элементов 3 шкалы прибора 1 и соответствующих им значений 4 (фиг. 2), причем изображение и положение элементов 3 и значений 4 модели полностью соответствуют аналогичным элементам и значениям, изображенным на шкале прибора 1.
Далее, при помощи микрометрической головки 5 воздействуют на прибор 1, в результате чего происходит изменение отображаемого прибором 1 значения. Затем получают текущее изображение прибора 1 (фиг. 3) с помощью устройства регистрации изображений, в качестве которого была использована web-камера 6. При этом web-камеру 6 (фиг. 1) располагают таким образом, чтобы внешняя граница прибора 1 располагалась на минимально возможном расстоянии от границы объектива web-камеры 6, а получаемое с ее помощью изображение прибора 1 было не меньше половины размера текущего изображения.
После получения текущего изображения (фиг. 3) прибора 1 на электронно-вычислительном устройстве 2 производят фильтрацию этого изображения, которая заключается в делении яркости каждого пикселя этого изображения на значение яркости квадратной области с центром в этом пикселе. В результате проделанных операций получают отфильтрованное изображение (фиг. 4) прибора 1.
На отфильтрованном изображении (фиг. 4) определяют положение прибора 1, для этого определяют его внешнюю границу. В конкретном случае способ реализуется на приборе 1, которым является индикатор ИЧ-10, а его внешняя граница образует окружность, поэтому определение положения прибора 1 сводится к определению окружности, соответствующей внешней границе прибора 1. Для каждого возможного положения и размера этой окружности вычисляют среднее значение яркости пикселей отфильтрованного изображения, лежащих на этой окружности, путем деления суммы значений яркости этих пикселей на их количество. После определения всех возможных окружностей на отфильтрованном изображении преступают к определению положения прибора 1 и его внешней границы по окружности наибольшего диаметра. Обусловлено это тем, что текущее изображение было получено таким образом, что вероятность обнаружения на нем окружности, большей по диаметру, чем окружность, образуемая внешней границей прибора 1, практически отсутствует.
После определения положения прибора 1 и его внешней границы, которой является окружность 7 (фиг. 5), определяют положение элементов шкалы прибора 1, которое заключается в нахождении отрезков 8 с минимальным средним значением яркости и направленных от образующей к центру окружности 7. Затем определяют положение стрелки прибора 1 путем нахождения отрезка 9 с минимальным средним значением яркости и направленного от центра окружности 7 к ее образующей.
Определив положение элементов шкалы и стрелки прибора 1, определяют значения, соответствующие найденным в виде отрезков 8 элементам шкалы. Для этого модель прибора 1 (фиг. 2) совмещают с изображением прибора 1 (фиг. 5), а именно элементы 3 (фиг. 2) шкалы прибора 1 с отрезками 8 (фиг. 5). Совместив указанные элементы, модель прибора 1 начинают поворачивать вокруг центра окружности 7 на величину углового расстояния, равную угловому расстоянию между элементами шкалы, до тех пор, пока значения 4 модели прибора 1 (фиг. 2) не совпадут со значениями на изображении прибора 1 (фиг. 5). По угловому положению модели прибора в момент совпадения значений определяют угловое положение элемента шкалы, соответствующего нулевому значению, а также угловое положение элементов шкалы, между которыми расположена стрелка прибора и соответствующие им значения.
Далее, зная угловое положение элемента 10 шкалы, соответствующего нулевому значению (фиг. 6), угловое положение стрелки прибора 1 в виде отрезка 9 и угловые положения элементов 11, 12 шкалы, между которыми расположена стрелка прибора, вычисляют значения угловых расстояний:
- α1 между элементом шкалы, соответствующим нулевому значению, и элементом 11 шкалы прибора;
- α2 между элементом шкалы, соответствующим нулевому значению, и элементом 12 шкалы прибора;
- β между элементом шкалы, соответствующим нулевому значению, и стрелкой прибора в виде отрезка 9.
После чего, используя вышеперечисленные значения и значения, соответствующие элементам 11, 12 шкалы прибора, вычисляют значение, считываемое с прибора, по формуле:
 ,
,
где X - значение, соответствующее положению стрелки прибора, или значение, считываемое с прибора;
X1, X2 - значения, соответствующие элементам 11, 12 шкалы прибора, между которыми расположена стрелка прибора в виде отрезка 9;
α1 - угловое расстояние между элементом шкалы, соответствующим нулевому значению, и элементом 11 шкалы прибора;
α2 - угловое расстояние между элементом шкалы, соответствующим нулевому значению, и элементом 12 шкалы прибора;
β - угловое расстояние между элементом шкалы, соответствующим нулевому значению, и стрелкой прибора в виде отрезка 9.
Данный способ был реализован (фиг. 1) на индикаторе 1 (индикатор часового типа ИЧ - 10) с использованием камеры 6 (Logitech С525) с разрешением 960×720 пикселей, микрометрической головки 5 и электронно-вычислительного устройства 2 (Pentium 4) с установленным на нем специальным программным обеспечением. В результате реализации способа была достигнута точность распознавания значения до 0,5 мкм при цене деления шкалы 10 мкм. Для расчета точности сравнивали значение, полученное при реализации способа, со значением, полученным с увеличенной фотографии индикатора с нанесенной на ней сеткой, которая разделяет деление шкалы на 20 одинаковых частей. В результате сравнения значения, полученные при реализации способа, и значения, вычисленные с помощью наложения сетки на увеличенную фотографию, было выявлено, что заявляемый способ позволяет распознавать значения менее 20-й части цены деления. Данный факт свидетельствует о том, что изобретение позволяет достигать высокой точности считывания показаний с приборов стрелочного типа и соответствует критерию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматической поверки индикаторов часового типа и измерительных головок с применением машинного зрения | 2023 |
|
RU2803036C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С ИНФОРМАЦИЕЙ, ПОЛУЧАЕМОЙ ОТ КАМЕРЫ | 2005 |
|
RU2375756C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО РАСПОЗНАВАНИЯ ИДЕНТИФИКАЦИОННОГО НОМЕРА | 2008 |
|
RU2403617C2 |
| Стрелочный манометр с электрическим интерфейсом | 2021 |
|
RU2791219C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1999 |
|
RU2152047C1 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1981 |
|
SU1259106A1 |
| НЕПОЛНЫЕ ЭТАЛОНЫ | 2013 |
|
RU2641452C2 |
| Аппаратно-программный комплекс для контроля процессов строительства и сбора конструкций с использованием BIM технологии | 2021 |
|
RU2769083C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ИЗГИБА ТРУБЫ ТЕХНОЛОГИЧЕСКОГО КАНАЛА | 2013 |
|
RU2545521C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |

Способ автоматического считывания показаний стрелочных приборов относится к области распознавания показаний стрелочных приборов, а именно к способам автоматического считывания показаний со стрелочных приборов, снабженных шкалой, например манометров, микрометров, термометров, анемометров и т.п. Способ автоматического считывания показаний стрелочного прибора заключается в том, что в памяти электронно-вычислительного устройства создают модель прибора, с которого предполагается считывание показаний, при помощи устройства регистрации изображений получают изображение прибора в момент отображения показаний, затем на электронно-вычислительном устройстве производят фильтрацию полученного изображения, определяют положение прибора и при помощи созданной модели распознают положение элемента шкалы, соответствующего нулевому значению прибора, после этого распознают положение стрелки прибора и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором, согласно изобретению модель прибора создают в виде элементов шкалы и соответствующих им значений, с помощью созданной модели, после распознавания элемента шкалы, соответствующего нулевому значению прибора, производят распознавание элементов шкалы, между которыми располагается стрелка прибора в момент отображения показаний, а также соответствующих им значений, после этого определяют значения расстояний между элементом шкалы, соответствующим нулевому значению прибора, и элементами шкалы, соответствующими значениям, между которыми располагается стрелка прибора в момент отображения показаний, далее, используя полученные значения и значение расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором. Техническим результатом изобретения является снижение трудозатрат при сохранении точности считывания. 6 ил.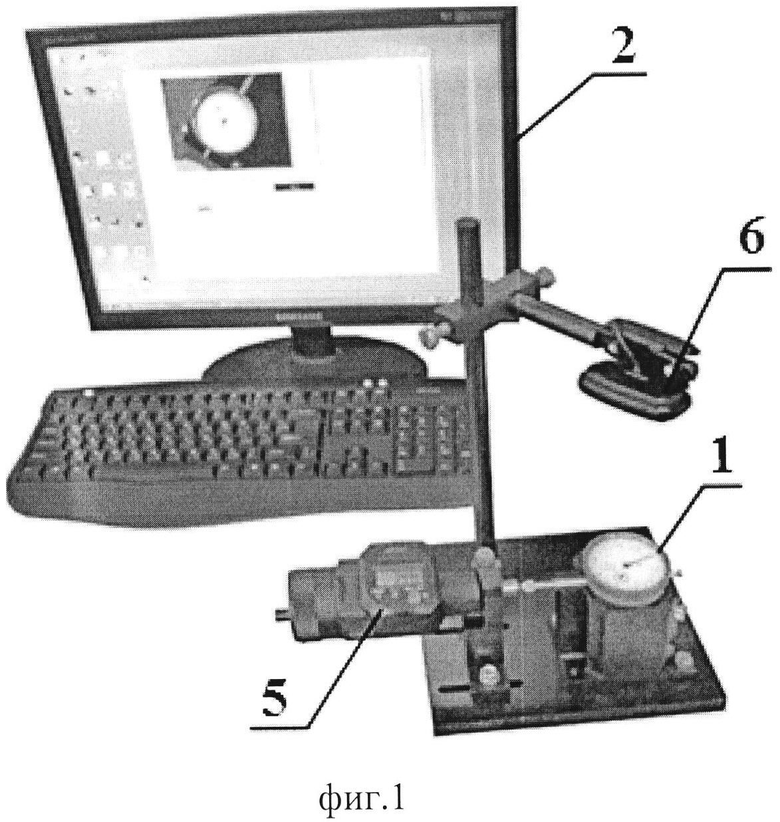
Способ автоматического считывания показаний стрелочного прибора, заключающийся в том, что в памяти электронно-вычислительного устройства создают модель прибора, с которого предполагается считывание показаний, при помощи устройства регистрации изображений получают изображение прибора в момент отображения показаний, затем на электронно-вычислительном устройстве производят фильтрацию полученного изображения, определяют положение прибора и при помощи созданной модели распознают положение элемента шкалы, соответствующего нулевому значению прибора, после этого распознают положение стрелки прибора и по значению расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором, отличающийся тем, что модель прибора создают в виде элементов шкалы и соответствующих им значений, с помощью созданной модели, после распознавания элемента шкалы, соответствующего нулевому значению прибора, производят распознавание элементов шкалы, между которыми располагается стрелка прибора в момент отображения показаний, а также соответствующих им значений, после этого определяют значения расстояний между элементом шкалы, соответствующим нулевому значению прибора, и элементами шкалы, соответствующими значениям, между которыми располагается стрелка прибора в момент отображения показаний, далее, используя полученные значения и значение расстояния между стрелкой прибора и элементом шкалы, соответствующим нулевому значению прибора, вычисляют значение, отображаемое прибором.
| Д.Б | |||
| ВОЛЕГОВ и Д.В | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| А.В | |||
| ОВСЯННИКОВ "Система автоматического контроля и управления на основе распознавания показаний на средствах визуализации аналоговых | |||

