Изобретение относится к области управления угловым движением космических аппаратов (КА) с силовыми гироскопами (СГ) и поворотными солнечными батареями (СБ).
Известен способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями (см. патент RU 2030338 С1, Способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями, НПО "Энергия" им С. П. Королева, Ковтун B. C. , Кузьмичев А.Ю., Платонов В.Н., 1995 г.), суть которого заключается в том, что к корпусу КА прикладывают внешний момент магнитных сил, получаемый от взаимодействия магнитного поля небесного тела со свойственным самому КА магнитным моментом. В указанном способе магнитный момент КА формируется с помощью солнечных батарей. Для этого формируют сигналы управления на токовые контуры солнечных батарей для создания магнитных моментов  положительного знака и магнитных моментов
положительного знака и магнитных моментов  отрицательного знака из условия равенства нулю суммарного магнитного момента. Далее после ориентации СБ на Солнце непрерывно измеряют вектор кинетического момента
отрицательного знака из условия равенства нулю суммарного магнитного момента. Далее после ориентации СБ на Солнце непрерывно измеряют вектор кинетического момента  в системе силовых гироскопов и вектор индукции магнитного поля Земли
в системе силовых гироскопов и вектор индукции магнитного поля Земли  по которому определяют единичный вектор
по которому определяют единичный вектор  от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака. Затем определяют знак проекции
от взаимодействия магнитного поля Земли и магнитных моментов токовых контуров положительного знака. Затем определяют знак проекции  на направление вектора кинетического момента
на направление вектора кинетического момента  . Если знак положителен, то формируют сигнал управления на токовые контуры СБ для совпадения векторов
. Если знак положителен, то формируют сигнал управления на токовые контуры СБ для совпадения векторов  при отрицательном знаке - для совпадения векторов
при отрицательном знаке - для совпадения векторов  Если проекция равна нулю, то сигнал управления на токовые контуры не формируют.
Если проекция равна нулю, то сигнал управления на токовые контуры не формируют.
Известна система формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями, реализующая описанный выше способ. Она содержит блок управления угловым движением KА, блок датчиков угловых скоростей, датчик измерения координат Солнца, блок силовых гироскопов, блок измерения значений вектора кинетического момента, блок формирования разгрузочного момента, магнитометр, систему ориентации СБ.
Основной недостаток рассмотренного способа и системы заключен в том, что такое формирование разгрузочного момента приводит к нарушению магнитоуравновешенности КА, что вызывает сбои в работе аппаратной части КА.
Известен другой способ формирования управляющих воздействий на КА с силовыми гироскопами и поворотными солнечными батареями (см. Patent US 4325124 U. Renner. System for controlling the direction of the momentum vector of a geosynchronous satellite. Apr. 13, 1982), не нарушающий магнитоуравновешенность КА, по технической сути наиболее близкий к предлагаемому изобретению и выбранный авторами в качестве прототипа. Способ прототип включает в себя измерение вектора абсолютной угловой скорости космического аппарата  и текущих значений вектора кинетического момента
и текущих значений вектора кинетического момента  в системе силовых гироскопов. Определение по этим измеренным значениям суммарного вектора кинетического момента
в системе силовых гироскопов. Определение по этим измеренным значениям суммарного вектора кинетического момента  по формуле
по формуле (1)
(1)
где J - тензор инерции КА.
Измерение координат единичного вектора направления на Солнце  и определение по нему расчетного времени приложения управляющего момента от сил светового давления к космическому аппарату. Измерение в расчетный момент времени угла отклонения положения КА относительно орбитальной ориентации по оси крена, которая задается единичным вектором, проведенным из центра Земли в центр масс КА. Определение требуемого управляющего момента для воздействия на КА. Если измеренный угол не выходит за границы зоны нечувствительности, то формирование управляющего момента не производится и осуществляется вращение СБ таким образом, чтобы их нормали к рабочим поверхностям совпадали с проекцией вектора
и определение по нему расчетного времени приложения управляющего момента от сил светового давления к космическому аппарату. Измерение в расчетный момент времени угла отклонения положения КА относительно орбитальной ориентации по оси крена, которая задается единичным вектором, проведенным из центра Земли в центр масс КА. Определение требуемого управляющего момента для воздействия на КА. Если измеренный угол не выходит за границы зоны нечувствительности, то формирование управляющего момента не производится и осуществляется вращение СБ таким образом, чтобы их нормали к рабочим поверхностям совпадали с проекцией вектора  на плоскость орбиты. Если измеренный угол выходит за границы зоны нечувствительности, то формируют требуемый управляющий момент одним из следующих способов:
на плоскость орбиты. Если измеренный угол выходит за границы зоны нечувствительности, то формируют требуемый управляющий момент одним из следующих способов:
- в расчетный момент времени останавливают вращение одной из СБ. По истечении заданного интервала времени восстанавливают вращение СБ таким образом, чтобы ее нормаль к рабочей поверхности совпадала с проекцией вектора  на плоскость орбиты;
на плоскость орбиты;
- в расчетный момент времени разворачивают СБ так, чтобы ее нормаль к рабочей поверхности составляла с проекцией вектора  на плоскость орбиты заданный угол и останавливают ее вращение. По истечении заданного интервала времени, когда нормаль СБ совпадет с проекцией вектора
на плоскость орбиты заданный угол и останавливают ее вращение. По истечении заданного интервала времени, когда нормаль СБ совпадет с проекцией вектора  на плоскость орбиты, возобновляют вращение СБ.
на плоскость орбиты, возобновляют вращение СБ.
Известна система формирования управляющих воздействий на КА с силовыми гироскопами и поворотными солнечными батареями, не нарушающая магнитоуравновешенность КА, по технической сути наиболее близкая к предлагаемому изобретению и выбранная авторами в качестве прототипа. Блок-схема этой системы приведена на фиг.1, содержащей 1 - блок определения навигационных параметров (БОНП), 2 - датчики ориентации (ДОР), 3 - датчики угловой скорости (ДУС), 4 - блок измерения кинетического момента системы СГ (БИКМ), 5 - блок определения вектора суммарного кинетического момента (БОВСКМ), первый вход которого связан с выходом ДУС 3, а второй вход - с выходом БИКМ 4, 6 - систему ориентации солнечных батарей (СОСБ), первый вход которой связан со вторым выходом БОНП 1, 7 - солнечные батареи (СБ), 8 - корпус КА, 9 - силовые гироскопы (СГ), 10 - блок определения углового отклонения (БОУО), вход которого связан с выходом ДОР 2, 11 - блок определения координат единичного вектора направления на Солнце в инерциальном базисе (БОВСИБ), вход которого связан с первым выходом БОНП 1, а выход - со вторым входом СОСБ 6, 12 - блок сравнения текущего углового отклонения с максимально допустимым (БСУО), вход которого соединен с выходом БОУО 10, 13 - блок выбора управляющего момента от сил солнечного давления и формирования сигналов для системы ориентации СБ (БВУМФС), первый вход которого связан со вторым выходом БОНП 1, второй вход - с выходом БОВСИБ 11, третий вход - с выходом БОУО 10, четвертый вход - с выходом БСУО 12, пятый вход - с выходом БОВСКМ 5, а выход - с третьим входом СОСБ 6. На фиг.1 также условно показано воздействие на СБ 7 сил солнечного давления и суммирование на корпусе КА 8 следующих моментов: управляющего момента от СГ 9 (MГ), суммарного момента всех внешних возмущающих сил (МВ) и управляющего момента (MУ) от СБ 7. Дополнительно приведена механическая связь СОСБ 6 с СБ 7 и СГ 9 с БИКМ 4, а также установка ДОР 2 и ДУС 3 на корпусе КА 8. Принцип работы системы состоит в том, что БОУО 10, используя информацию с ДОР 2, определяет угловое отклонение ориентации КА от заданной и, если отклонение превышает максимально допустимое, БСУО 12 формирует для БВУМФС 13 требование на проведение разгрузки накопленного кинетического момента. При наличии требования на проведение разгрузки БВУМФС 13 определяет момент для проведения разгрузки, используя информацию о положении КА из БОНП 1 и вектор направления на Солнце из БОВСИБ 11, далее БВУМФС 13 использует информацию об угловом отклонении из БОУО 10 и вектор суммарного кинетического момента, определенный в БОВСКМ 5 по формуле (1), для выбора управляющего момента от сил солнечного давления, а затем формирует сигналы для СОСБ 6, которая осуществляет управление СБ для формирования выбранного управляющего момента от сил солнечного давления одним из описанных выше способов.
Основной недостаток способа и системы прототипов заключен в том, что управление вектором суммарного кинетического момента  осуществляется на основе измерения отклонения положения КА от заданной ориентации, а не на основе измерения самого вектора
осуществляется на основе измерения отклонения положения КА от заданной ориентации, а не на основе измерения самого вектора  Такой подход приемлем для КА с одним маховиком и не допустим для большого класса КА, которые требуют поддержания заданной ориентации с высокой точностью. Для КА с несколькими маховиками, расположенными по разным осям, применение такого способа может привести не к разгрузке, а к нагрузке системы СГ. Кроме того, в прототипе управляющий момент формируется непродолжительными импульсами (по 108 минут), в течение которых одна из батарей остается неподвижной, что ограничивает кинетический момент, который способ и система прототипы позволяют разгрузить за один виток. Также в способе и системе прототипах отсутствует возможность непрерывной компенсации внешнего возмущающего момента. Указанные недостатки способа и системы прототипов приводят к тому, что эти способ и система обеспечивают требуемую разгрузку СГ только для КА с одним СГ и при достаточно малом внешнем возмущающем моменте. Для КА с несколькими СГ или при большом внешнем возмущающем моменте способ и система прототипы не способны обеспечить требуемую разгрузку СГ и компенсацию указанного момента.
Такой подход приемлем для КА с одним маховиком и не допустим для большого класса КА, которые требуют поддержания заданной ориентации с высокой точностью. Для КА с несколькими маховиками, расположенными по разным осям, применение такого способа может привести не к разгрузке, а к нагрузке системы СГ. Кроме того, в прототипе управляющий момент формируется непродолжительными импульсами (по 108 минут), в течение которых одна из батарей остается неподвижной, что ограничивает кинетический момент, который способ и система прототипы позволяют разгрузить за один виток. Также в способе и системе прототипах отсутствует возможность непрерывной компенсации внешнего возмущающего момента. Указанные недостатки способа и системы прототипов приводят к тому, что эти способ и система обеспечивают требуемую разгрузку СГ только для КА с одним СГ и при достаточно малом внешнем возмущающем моменте. Для КА с несколькими СГ или при большом внешнем возмущающем моменте способ и система прототипы не способны обеспечить требуемую разгрузку СГ и компенсацию указанного момента.
Техническим результатом, достигаемым данным изобретением, является обеспечение разгрузки системы СГ для КА с произвольным количеством СГ и непрерывная компенсация возмущающего момента при помощи формирования управляющих моментов на КА от сил солнечного давления. Кроме того, благодаря непрерывному формированию управляющего момента, применение предлагаемого способа и системы увеличивает срок службы КА за счет экономии рабочего тела и ресурса двигательных установок, так как за одно и то же время позволяет производить значительно большие изменения кинетического момента, чем применение способа и системы прототипов.
Указанный технический результат достигается тем, что в способе формирования управляющих моментов на космический аппарат с силовыми гироскопами и поворотными солнечными батареями, включающем измерение вектора абсолютной угловой скорости космического аппарата  измерение вектора кинетического момента
измерение вектора кинетического момента  в системе силовых гироскопов, определение суммарного вектора кинетического момента КА
в системе силовых гироскопов, определение суммарного вектора кинетического момента КА  измерение единичного вектора направления на Солнце
измерение единичного вектора направления на Солнце  и определение по нему расчетного времени приложения управляющего момента от сил светового давления к космическому аппарату, определение требуемого управляющего момента для воздействия на космический аппарат, формирование требуемого управляющего момента на космический аппарат путем разворота солнечных батарей в расчетный момент времени, в отличие от известного в текущий момент времени t, по определенным в предыдущие моменты времени (τ<t) значениям суммарного вектора кинетического момента
и определение по нему расчетного времени приложения управляющего момента от сил светового давления к космическому аппарату, определение требуемого управляющего момента для воздействия на космический аппарат, формирование требуемого управляющего момента на космический аппарат путем разворота солнечных батарей в расчетный момент времени, в отличие от известного в текущий момент времени t, по определенным в предыдущие моменты времени (τ<t) значениям суммарного вектора кинетического момента  , устанавливают величину постоянной составляющей
, устанавливают величину постоянной составляющей  скорости изменения вектора
скорости изменения вектора  выбирают солнечную батарею, при управлении которой формируется управляющий момент
выбирают солнечную батарею, при управлении которой формируется управляющий момент  от сил светового давления, удовлетворяющий условию
от сил светового давления, удовлетворяющий условию
MB1•Му1<0,
где МВ1 и Му1 - проекции векторов  на ось, направление которой задается единичным вектором
на ось, направление которой задается единичным вектором 

где  единичный вектор в направлении орбитальной угловой скорости космического аппарата,
единичный вектор в направлении орбитальной угловой скорости космического аппарата,
в начальный момент времени t0 формирования управляющего момента определяют проекцию G1 суммарного вектора кинетического момента  на ось, направление которой задается вектором
на ось, направление которой задается вектором  определяют угол α0 между нормалью к плоскости выбранной солнечной батареи и проекцией вектора
определяют угол α0 между нормалью к плоскости выбранной солнечной батареи и проекцией вектора  на плоскость орбиты, при котором формируется управляющий момент, удовлетворяющий условиям:
на плоскость орбиты, при котором формируется управляющий момент, удовлетворяющий условиям:
Му1= -МВ1, если модуль проекции G1 < GKP - порогового значения вектора кинетического момента,
Mу1=-МВ1+ΔМ, если модуль проекции G1 ≥ GKP, где ΔM- - изменение проекции управляющего момента на ось, направление которой задается вектором  создаваемое при развороте выбранной СБ на угол Δα, величина которого определяется дискретностью угла поворота СБ, при этом знак ΔM противоположен знаку проекции G1,
создаваемое при развороте выбранной СБ на угол Δα, величина которого определяется дискретностью угла поворота СБ, при этом знак ΔM противоположен знаку проекции G1,
определяют проекции G2 и Му2 векторов  на ось, направление которой совпадает с проекцией единичного вектора
на ось, направление которой совпадает с проекцией единичного вектора  на плоскость орбиты. Затем на интервале времени от t0 до t1=t0+Δt, где Δt- периодичность определения требуемого управляющего момента, формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α0 в направлении, при котором выполняется условие
на плоскость орбиты. Затем на интервале времени от t0 до t1=t0+Δt, где Δt- периодичность определения требуемого управляющего момента, формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α0 в направлении, при котором выполняется условие
sign(G2)=-sign(Mу2),
в моменты времени ti=t0+iΔt; i=1, 2,... определяют проекцию G1 суммарного вектора кинетического момента  на ось, направление которой задается вектором
на ось, направление которой задается вектором  Определяют значение угла αi, при котором формируется управляющий момент, удовлетворяющий условиям
Определяют значение угла αi, при котором формируется управляющий момент, удовлетворяющий условиям
Mу1= M'у1, если модуль проекции G1 < GKP или  где M'у1 - проекция управляющего момента, сформированного в момент времени ti-1, G'1 - значение проекции G1 в момент времени ti-1, ΔG- уставочное значение, определяющее минимальную величину разгрузки за время Δt,
где M'у1 - проекция управляющего момента, сформированного в момент времени ti-1, G'1 - значение проекции G1 в момент времени ti-1, ΔG- уставочное значение, определяющее минимальную величину разгрузки за время Δt,
Mу1=M'у1 +ΔM, если модуль проекции G1 ≥ GKP и 
определяют проекции G2 и Му2 векторов  на ось, направление которой совпадает с проекцией единичного вектора
на ось, направление которой совпадает с проекцией единичного вектора  на плоскость орбиты. На интервале времени от ti до ti+1 формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол αi в направлении, при котором выполняется условие
на плоскость орбиты. На интервале времени от ti до ti+1 формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол αi в направлении, при котором выполняется условие
sign(G2)=-sign(Mу2).
Указанный технический результат достигается тем, что в систему, содержащую блок определения навигационных параметров, датчики ориентации, датчики угловой скорости, блок измерения кинетического момента системы силовых гироскопов, блок определения вектора суммарного кинетического момента, первый вход которого связан с выходом датчиков угловой скорости, а второй вход - с выходом блока измерения кинетического момента системы силовых гироскопов, систему ориентации солнечных батарей, введен блок определения углового положения КА, первый, второй и третий входы которого связаны соответственно со вторым выходом блока определения навигационных параметров, с выходом датчиков ориентации и с выходом датчиков угловой скорости, блок определения координат единичного вектора направления на Солнце в связанном базисе, первый вход которого связан с первым выходом блока определения навигационных параметров, а второй вход - со вторым выходом блока определения углового положения КА, блок определения параметров управления угловым движением, первый вход которого связан с первым выходом блока определения углового положения КА, второй вход - с выходом датчиков угловой скорости, третий вход - с выходом блока определения вектора суммарного кинетического момента, блок формирования управляющих сигналов на СГ, вход которого связан со вторым выходом блока определения параметров управления угловым движением, блок оценки постоянной составляющей возмущающего момента, первый вход которого соединен с выходом блока определения координат единичного вектора направления на Солнце в связанном базисе, второй вход - с выходом блока определения вектора суммарного кинетического момента, а третий вход - с третьим выходом блока определения параметров управления угловым движением, блок определения управляющего момента от сил солнечного давления и требуемого отклонения солнечных батарей, первый вход которого связан с выходом блока определения координат единичного вектора направления на Солнце в связанном базисе, второй вход - с первым выходом блока определения параметров управления угловым движением, третий вход - с выходом блока определения вектора суммарного кинетического момента, четвертый вход - с выходом блока оценки постоянной составляющей возмущающего момента, при этом первый вход системы ориентации солнечных батарей связан с выходом блока определения координат единичного вектора направления на Солнце в связанном базисе, а второй вход системы ориентации солнечных батарей - с выходом блока определения управляющего момента от сил солнечного давления и требуемого отклонения солнечных батарей.
При поддержании заданной ориентации КА при помощи СГ постоянная составляющая вектора - функции  будет постоянно расти в проекциях на оси связанного базиса по мере увеличения длительности поддержания ориентации. Для значительного класса КА (в т.ч. и для КА на геостационарной орбите) указанный рост происходит в основном в результате взаимодействия магнитного поля Земли с собственным магнитным моментом КА и под воздействием на КА сил солнечного давления, причем, под воздействием этих возмущающих моментов растет в основном постоянная составляющая проекции
будет постоянно расти в проекциях на оси связанного базиса по мере увеличения длительности поддержания ориентации. Для значительного класса КА (в т.ч. и для КА на геостационарной орбите) указанный рост происходит в основном в результате взаимодействия магнитного поля Земли с собственным магнитным моментом КА и под воздействием на КА сил солнечного давления, причем, под воздействием этих возмущающих моментов растет в основном постоянная составляющая проекции  на плоскость орбиты. Т. к. создать КА с нулевым магнитным моментом и такой, чтобы его центр масс всегда точно совпадал с центром солнечного давления, на практике невозможно, то невозможно и избежать воздействия на КА указанных возмущающих моментов. Кроме того, на КА такого типа периодически проводится коррекция орбиты, при которой угловую стабилизацию производят при помощи СГ. Поэтому по окончании коррекции кинетический момент
на плоскость орбиты. Т. к. создать КА с нулевым магнитным моментом и такой, чтобы его центр масс всегда точно совпадал с центром солнечного давления, на практике невозможно, то невозможно и избежать воздействия на КА указанных возмущающих моментов. Кроме того, на КА такого типа периодически проводится коррекция орбиты, при которой угловую стабилизацию производят при помощи СГ. Поэтому по окончании коррекции кинетический момент  может принимать произвольно большие значения.
может принимать произвольно большие значения.
Кинетический момент корпуса КА на геостационарной орбите можно считать постоянным и направленным вдоль вектора орбитальной угловой скорости, а следовательно, проекции вектора суммарного кинетического момента КА  и вектора кинетического момента системы СГ
и вектора кинетического момента системы СГ  на плоскость орбиты совпадают. Для предотвращения потери управляемости при насыщении системы СГ применяют различные способы разгрузки СГ. Предлагаемый способ позволяет не только разгружать накопленный кинетический момент, но и осуществлять непрерывную компенсацию роста
на плоскость орбиты совпадают. Для предотвращения потери управляемости при насыщении системы СГ применяют различные способы разгрузки СГ. Предлагаемый способ позволяет не только разгружать накопленный кинетический момент, но и осуществлять непрерывную компенсацию роста  за счет управления моментом от сил солнечного давления на КА.
за счет управления моментом от сил солнечного давления на КА.
Суть изобретения поясняется фиг.1-7. На фиг.1 приведена блок-схема системы прототипа, на фиг.2 приведена блок-схема предлагаемой системы, на фиг.3 - используемые системы координат, на фиг.4 - КА с солнечными батареями, на фиг.5 - блок-схема алгоритма работы БОВМ 18, на фиг.6 - силы солнечного давления на элементарную площадку, на фиг.7 - блок-схема алгоритма работы БОУМТО 19.
Блок-схема предлагаемой системы, приведенная на фиг.2, включает 1 - блок определения навигационных параметров (БОНП), 2 - датчики ориентации (ДОР), 3 - датчики угловой скорости (ДУС), 4 - блок измерения кинетического момента системы СГ (БИКМ), 5 - блок определения вектора суммарного кинетического момента (БОВСКМ), первый вход которого связан с выходом ДУС 3, а второй вход - с выходом БИКМ 4, 6 - система ориентации солнечных батарей (СОСБ), 7 - солнечные батареи (СБ), 8 - корпус КА, 9 - силовые гироскопы (СГ), 14 - блок определения углового положения КА (БОУП), первый вход которого связан со вторым выходом БОНП 1, второй вход - с выходом ДОР 2, третий вход - с выходом ДУС 3, 15 - блок определения координат единичного вектора направления на Солнце в связанном базисе (БОВССБ), первый вход которого связан с первым выходом БОНП 1, а второй вход - со вторым выходом БОУП 14, 16 - блок определения параметров управления угловым движением (БОПУУД), первый вход которого связан с первым выходом БОУП 14, второй вход - с выходом ДУС 3, третий вход - с выходом БОВСКМ 5, 17 - блок формирования управляющих сигналов на СГ (БФУССГ), вход которого связан со вторым выходом БОПУУД 16, 18 - блок оценки постоянной составляющей возмущающего момента (БОВМ), первый вход которого соединен с выходом БОВССБ 15, а второй вход - с выходом БОВСКМ 5, 19 - блок определения управляющего момента от СД и требуемого отклонения СБ (БОУМТО), первый вход которого связан с выходом БОВССБ 15, второй вход - с первым выходом БОПУУД 16, третий вход - с выходом БОВСКМ 5, четвертый вход - с выходом БОВМ 18, также приведена связь 1-го входа СОСБ 6 с выходом БОВССБ 15, а 2-го входа СОСБ 6 - с выходом БОУМТО 19. Условно показано воздействие на СБ 7 сил солнечного давления и суммирование на корпусе КА 8 следующих моментов: управляющего момента от СГ 9 (MГ), суммарного момента всех внешних возмущающих сил (МВ) и управляющего момента (MУ) от СБ 7. Дополнительно приведена механическая связь СОСБ 6 с СБ 7, БФУССГ 17 с СГ 9 и СГ 9 с БИКМ 4, а также установка ДОР 2 и ДУС 3 на корпусе КА 8.
Примером реализации данной системы может служить система управления движения КА "Ямал 100". Работает она следующим образом. БОУП 14 на основе координат вектора угловой скорости  в связанной системе координат, поступающих с ДУС 3, и данных, поступающих с ДОР 2, формирует нормированный кватернион разворота А от выбранной инерциальной системы координат к связанной системе координат, путем интегрирования уравнения
в связанной системе координат, поступающих с ДУС 3, и данных, поступающих с ДОР 2, формирует нормированный кватернион разворота А от выбранной инерциальной системы координат к связанной системе координат, путем интегрирования уравнения
компоненты которого используются в БОВССБ 15, а также кватернион управления N, компоненты которого используются в БОПУУД 16. Кватернион N соответствует развороту от орбитального базиса к связанному
N=L-1•А,
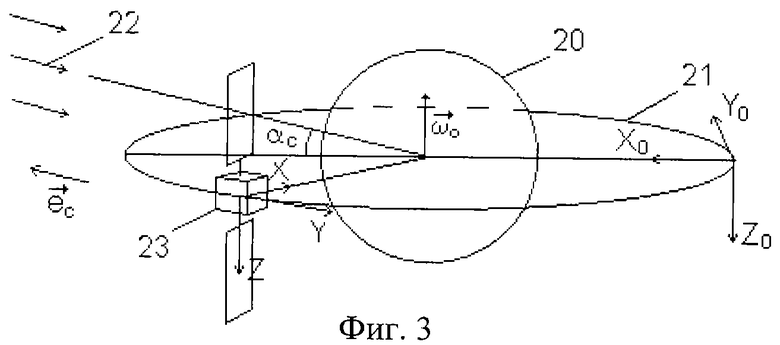
где L - нормированный орбитальный кватернион, соответствующий развороту от выбранной инерциальной системы координат к орбитальной системе координат, формируемый БОНП 1, принцип работы которого подробно представлен в "Навигация, наведение и стабилизация в космосе" (Авторы Ч.С. Дрейпер и др., "Машиностроение", Москва, 1970 г. ). Оси связанной системы координат OXYZ направлены таким образом, что при поддержании орбитальной ориентации они совпадают с осями орбитальной системы координат и ось Х направлена на центр Земли, ось Z - противоположно вектору орбитальной угловой скорости, а ось Y - дополняет их до правой тройки (см. фиг.3). На фиг.3 цифрами обозначены: 20 - Земля, 21 - траектория движения КА, 22 - направление падающего солнечного света, 23 - КА. БОВСКМ 5 формирует для БОПУУД 16, БОВМ 18 и БОУМТО 19 компоненты вектора суммарного момента  по формуле (1). БОПУУД 16 формирует расчетное значение вектора требуемого управляющего момента для построения и поддержания ориентации КА
по формуле (1). БОПУУД 16 формирует расчетное значение вектора требуемого управляющего момента для построения и поддержания ориентации КА  компоненты которого используются
компоненты которого используются
БФУССГ 17, и требуемый вектор орбитальной угловой скорости  в связанном базисе
в связанном базисе , координаты которого используются в БОВМ 18, здесь ωo - модуль орбитальной скорости,
, координаты которого используются в БОВМ 18, здесь ωo - модуль орбитальной скорости,  единичный вектор, направленный противоположно оси Z орбитальной системы координат. Кроме того, БОПУУД 16 формирует для БОУМТО 19 требование на формирование управляющего момента от сил солнечного давления. Требование на формирование управляющего момента от сил солнечного давления формируется при отсутствии проведения коррекции орбиты и когда построена и поддерживается орбитальная ориентация, т.е.
единичный вектор, направленный противоположно оси Z орбитальной системы координат. Кроме того, БОПУУД 16 формирует для БОУМТО 19 требование на формирование управляющего момента от сил солнечного давления. Требование на формирование управляющего момента от сил солнечного давления формируется при отсутствии проведения коррекции орбиты и когда построена и поддерживается орбитальная ориентация, т.е.

где δN- уставка, определяющая границы зоны нечувствительности по углу,
δω- уставка, определяющая границы зоны нечувствительности по угловой скорости,
I - единичный кватернион.
БФУССГ 17 использует компоненты вектора  для формирования сигналов на электрические двигатели, управляющие скоростями вращения СГ.
для формирования сигналов на электрические двигатели, управляющие скоростями вращения СГ.
БОВССБ 15 использует координаты единичного вектора направления на Солнце в выбранной инерциальной системе координат, формируемые БОНП 1 и компоненты кватерниона А из БОУП 14. По ним рассчитываются координаты единичного вектора направления на Солнце в связанной системе координат, используемые в СОСБ 10, БРУМ 9 и БОВМ 13.

где RE - координаты единичного вектора направления на Солнце в связанной системе координат,
RI - координаты единичного вектора направления на Солнце в выбранной инерциальной системе координат.
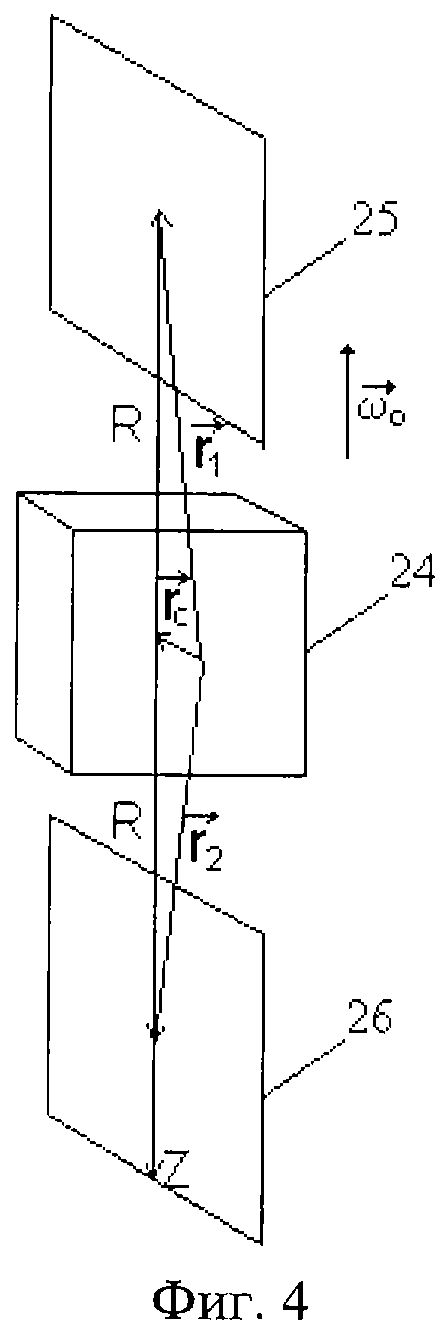
СОСБ 6 осуществляет разворот СБ 7 в требуемое положение. KA "Ямал-100" с поворотными СБ схематично представлен на фиг.4, где цифрами обозначены: 24 - центральный блок, 25 - СБ 1, 26 - СБ 2. Положение каждой СБ на KA "Ямал-100" задается углом поворота данной СБ относительно "исходного" положения. В исходном положении нормаль к рабочей поверхности СБ направлена противоположно оси Х связанной системы координат. Угол поворота измеряется в зонах (1 зона равна Δα≈2.81o): USB[0] - для первой СБ и USB[1] - для второй. Поворот осуществляется по часовой стрелке, если смотреть на батарею со стороны центрального блока.
По координатам единичного вектора на Солнце в связанной системе координат RE из БОВССБ 15 определяются положения СБ USB0[0] и USB0[1], при которых нормали батарей наиболее близки к проекции  на плоскость орбиты. Далее формируются
на плоскость орбиты. Далее формируются
USB[0]=USB0[0]+DZ[0] и
USB[1]=USB0[1]+dz[1],
где DZ[0] и DZ[1] - поправки к положению соответствующих СБ относительно направления на Солнце, формируемые в БОУМТО 19. Затем СОСБ 6 осуществляет разворот СБ 7 при помощи электрических двигателей до тех пор, пока первая батарея не придет в зону USB[0]-2, a вторая - в зону USB[1]+2. После этого разворот батарей прекращается до тех пор, пока вследствие вращения КА они не придут соответственно в зоны USB[0]+2 и USB[1]-2. Далее снова осуществляется разворот и т.д.
Описание вышеуказанных блоков и их реализация на КА "Ямал 100" приведены в техническом описании "Система управления движением и навигацией" (300ГК. 12Ю000А-0ТО).
БОВМ 18 реализуется в виде программы, работающей на БЦВМ, алгоритм которой представлен на фиг.5, где G[0..2] - координаты вектора суммарного кинетического момента из БОВСКМ 5, е[0..2] - координаты единичного вектора направления на Солнце из БОВССБ 15, ω0[0..2] - координаты вектора орбитальной угловой скорости из БОПУУД 16, МB - постоянная составляющая возмущающего момента, формируемая для БОУМТО 19, ΔT - периодичность подключения программы, ΔК - изменение проекции суммарного кинетического момента за время ΔT, G'[0.. 2] - координаты вектора суммарного кинетического момента, запомненные при предыдущем подключении программы. В БОВМ 18 оценивается суммарный возмущающий момент в предыдущие моменты времени по формуле
Определяется проекция этого момента на ось Y0 инерциальной системы координат OX0Y0Z0 (см. фиг. 3). Ось Х0 этой системы направлена в направлении проекции  на орбитальную плоскость, ось Z0 - противоположно вектору
на орбитальную плоскость, ось Z0 - противоположно вектору  а ось Y0 так, чтобы она дополняла предыдущие две оси до правой тройки. Эта система совпадает со связанной системой координат OXYZ, когда вектор направления на центр Земли совпадет с проекцией
а ось Y0 так, чтобы она дополняла предыдущие две оси до правой тройки. Эта система совпадает со связанной системой координат OXYZ, когда вектор направления на центр Земли совпадет с проекцией  на плоскость орбиты. Определяется постоянная составляющая МB проекции вектора
на плоскость орбиты. Определяется постоянная составляющая МB проекции вектора  на ось Y0, которая используется в БОУМТО 19.
на ось Y0, которая используется в БОУМТО 19.
где прямые скобки означают усреднение по времени.
Чтобы пояснить принцип работы БОУМТО 19, оценим моменты, действующие на КА со стороны сил солнечного давления.
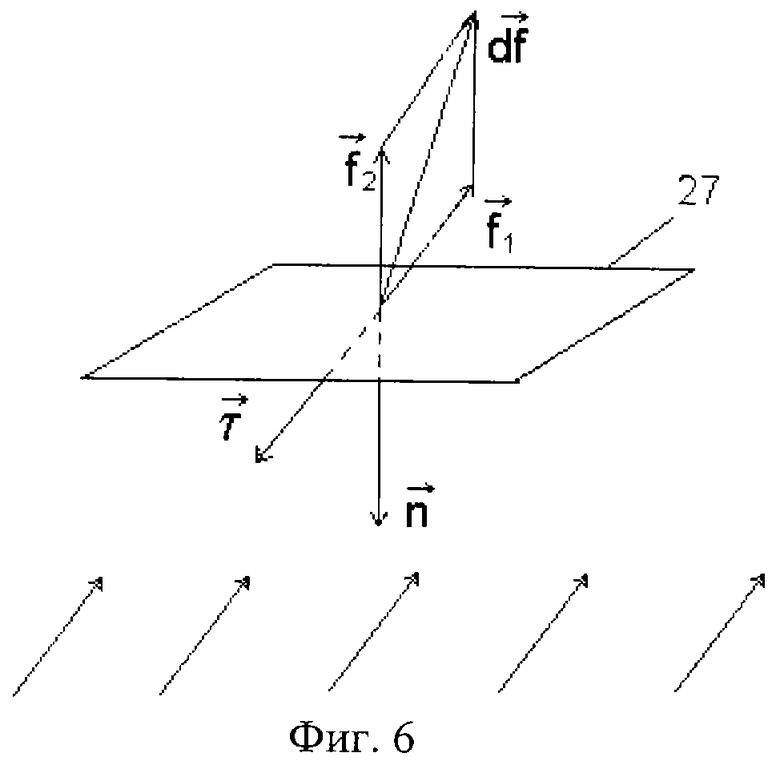
Силы, действующие со стороны света на элементарную площадку dS, изображены на фиг.6. Здесь 27 - площадка dS,  единичный вектор в направлении на Солнце,
единичный вектор в направлении на Солнце,  нормаль к поверхности. Сила
нормаль к поверхности. Сила


Здесь ε0- коэффициент отражения, Pc - давление солнечного света.
Момент  , действующий на спутник:
, действующий на спутник:


Интегрирование производится по всей освещенной поверхности КА.
Основной вклад в этот момент вносят силы, действующие на поверхность СБ, и в дальнейшем мы не будем учитывать момент, создаваемый силами солнечного давления на корпус КА.
КА "Ямал-100" снабжен двумя поворотными СБ, общая ось которых параллельна вектору орбитальной угловой скорости (см. фиг.4). Найдем проекции суммарного момента  на оси инерциальной системы координат OX0Y0Z0. Проинтегрировав по всей поверхности СБ и пренебрегая небольшими периодическими составляющими, возникающими из-за несовпадения центра масс с центром давления, получаем для проекций
на оси инерциальной системы координат OX0Y0Z0. Проинтегрировав по всей поверхности СБ и пренебрегая небольшими периодическими составляющими, возникающими из-за несовпадения центра масс с центром давления, получаем для проекций  на плоскость орбиты:
на плоскость орбиты:
MX = PcSε0cos2αCR(-sinα1cos2α1+sinα2cos2α2);
Здесь S - суммарная площадь СБ, R - расстояние от центра солнечного давления до центра симметрии каждой батареи, αC- угол между направлением на Солнце и плоскостью орбиты, α1 и α2- углы поворота первой и второй батарей соответственно относительно положения, при котором нормаль батареи совпадает с проекцией  на плоскость орбиты. Углы будем считать положительными, когда разворот происходит по часовой стрелке, если смотреть со стороны +Z0, а в противном случае - отрицательными.
на плоскость орбиты. Углы будем считать положительными, когда разворот происходит по часовой стрелке, если смотреть со стороны +Z0, а в противном случае - отрицательными.
У проекции вектора  на ось Z0 постоянная составляющая отсутствует и разворот СБ на углы α1 и α2 соответственно приводит к возникновению периодической составляющей, изменяющейся с орбитальной частотой и амплитудой
на ось Z0 постоянная составляющая отсутствует и разворот СБ на углы α1 и α2 соответственно приводит к возникновению периодической составляющей, изменяющейся с орбитальной частотой и амплитудой
где A - расстояние от центра давления до центра масс КА.
Из приведенных соотношений видно, что разворот той или иной СБ относительно направления на Солнце приводит к возникновению управляющего момента, знак проекции которого на ось Y0 определяется тем, какую СБ повернули, а знак проекции этого момента на ось Х0 - тем, в какую сторону повернули данную батарею. Предлагаемый способ позволяет формировать требуемый управляющий момент путем разворота СБ на угол, при котором осуществляется разгрузка накопленного кинетического момента и компенсируется постоянная составляющая возмущающего момента.
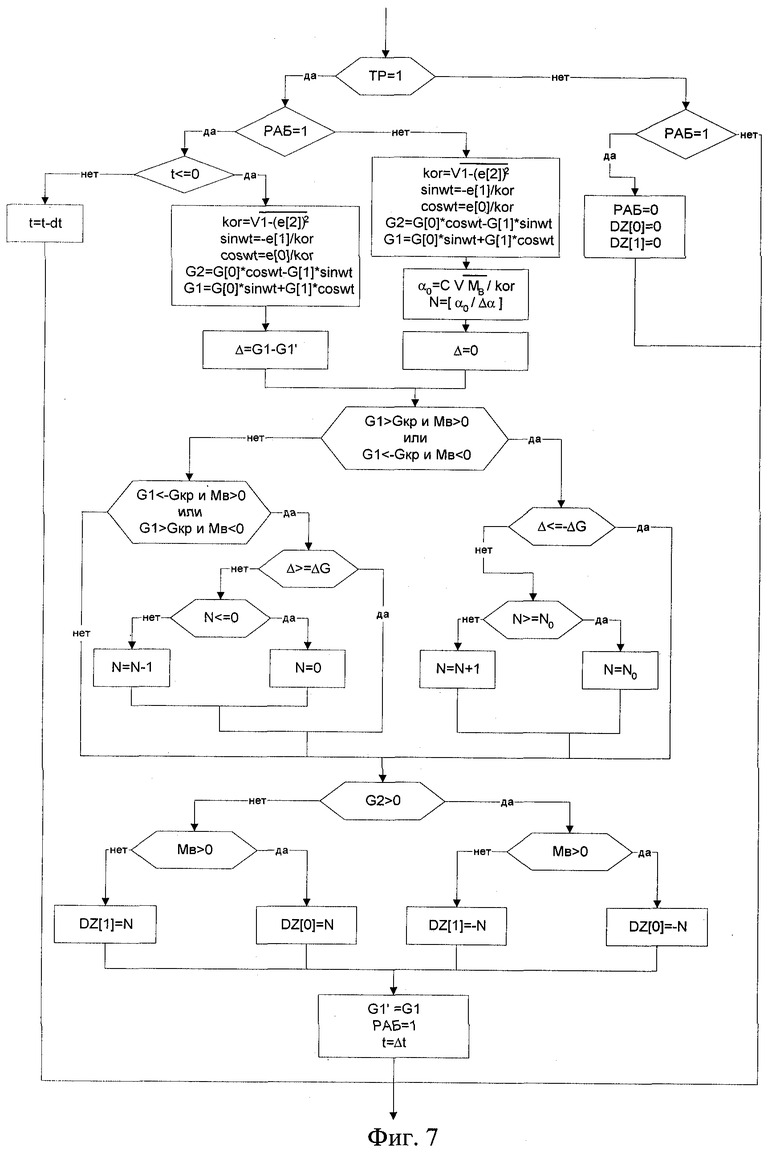
БОУМТО 19 реализуется в виде программы, работающей на БЦВМ, алгоритм которой представлен на фиг.7, где G[0..2] - координаты вектора суммарного кинетического момента из БОВСКМ 5, е[0..2] - координаты единичного вектора направления на Солнце из БОВССБ 15, МB - постоянная составляющая возмущающего момента из БОВМ 18, ТР - требование на формирование управляющего момента от сил солнечного давления из БОПУУД 16, РАБ - признак формирования управляющего момента, dt - периодичность подключения программы, DZ[0] и DZ[1] - требуемые отклонения положения СБ, формируемые для СОСБ 6, t - время, оставшееся до очередного пересчета требуемого отклонения СБ, G2 и G1 - проекции кинетического момента на оси Х0 и Y0 соответственно, G1' - значение проекции G1, запомненное во время предыдущего пересчета, С - константа
Пусть проекция возмущающего момента на ось Y0 МB, формируемая в БОВМ 18, имеет положительный знак. Тогда для формирования управляющего момента выбираем первую батарею, т.к. при развороте ее относительно направления на Солнце формируется управляющий момент, имеющий отрицательную проекцию на ось Y0 Mу. В БОУМТО 19 рассчитывается угол α0, при развороте на который Му=-МB.

Определяется число зон, соответствующее повороту СБ на угол α0
N = [α0/Δα],
где квадратные скобки означают выделение целой части.
Во время проведения коррекции орбиты или когда на КА не поддерживается орбитальная ориентация, формирование управляющего момента не производится и требуемые отклонения СБ от ориентации на Солнце полагаются равными нулю, DZ[0] = DZ[1] = 0 для каждой батареи. Если же коррекция не проводится и поддерживается орбитальная ориентация, то в начальный момент времени формирования управляющего момента определяются текущие проекции вектора  на ось Х0 (G2) и на ось Y0 (G1). Запоминается текущее значение G1, G1=G'1. Если G1≥GKP или G1≤GKP, то для обеспечения разгрузки кинетического момента по оси Y0 соответственно увеличивается или уменьшается N на одну зону. Здесь GKP - пороговое значение кинетического момента, при превышении которого требуется разгрузка системы СГ. Причем N должно остаться неотрицательным и меньшим некоторого максимального значения N0, превышение которого недопустимо с точки зрения энергообеспечения КА. Для КА "Ямал 100" можно взять, например, N0= 10, что соответствует развороту СБ на угол ≈28o относительно направления на Солнце и не приводит к значительным потерям по энергетике.
на ось Х0 (G2) и на ось Y0 (G1). Запоминается текущее значение G1, G1=G'1. Если G1≥GKP или G1≤GKP, то для обеспечения разгрузки кинетического момента по оси Y0 соответственно увеличивается или уменьшается N на одну зону. Здесь GKP - пороговое значение кинетического момента, при превышении которого требуется разгрузка системы СГ. Причем N должно остаться неотрицательным и меньшим некоторого максимального значения N0, превышение которого недопустимо с точки зрения энергообеспечения КА. Для КА "Ямал 100" можно взять, например, N0= 10, что соответствует развороту СБ на угол ≈28o относительно направления на Солнце и не приводит к значительным потерям по энергетике.
Далее определяют поправку DZ[0] к положению первой батареи USB0[0].
Если G2>0, то DZ[0]=-N,
иначе DZ[0]=N.
Далее через интервалы времени Δt производится пересчет поправки DZ[0]. Для этого определяются текущие проекции вектора  на ось Х0 (G2) и на ось Y0 (G1). Если G1≥GKP и G'1-G1≤ΔG, то для обеспечения разгрузки кинетического момента по оси Y0 N увеличивается на одну зону. Если G1≤GКР и G1- G '1≤ΔG, то N уменьшается на одну зону. Где ΔG определяет минимальную скорость разгрузки за время Δt.
на ось Х0 (G2) и на ось Y0 (G1). Если G1≥GKP и G'1-G1≤ΔG, то для обеспечения разгрузки кинетического момента по оси Y0 N увеличивается на одну зону. Если G1≤GКР и G1- G '1≤ΔG, то N уменьшается на одну зону. Где ΔG определяет минимальную скорость разгрузки за время Δt.
Если G2> 0, то определяется DZ[0]=-N,
иначе DZ[0]=N.
Аналогично формируется значение DZ[1] в том случае, когда знак проекции МB отрицателен.
Таким образом при развороте СБ в заданное положение создается управляющий момент  который либо компенсирует возмущающий момент
который либо компенсирует возмущающий момент 

либо разгружает накопленный кинетический момент гиродинов
На КА "Ямал-100" характерная величина внешнего возмущающего момента в плоскости орбиты - 6•10-5 Нм. Компенсация такого момента, а также разгрузка СГ на газовых реактивных двигателях требует порядка 5 кг жидкого азота в год. Применение предлагаемого способа и системы позволяет сэкономить это топливо для других операций, а следовательно, без каких-либо дополнительных затрат увеличить срок службы КА, что для спутников связи ведет соответственно к уменьшению стоимости каналов связи.


Изобретение относится к области управления и может использоваться в системах разгрузки и компенсации возмущений, действующих на космические аппараты (КА) с трехосной стабилизацией. В предлагаемом способе определяют угловую скорость КА и его кинетические моменты: в системе силовых гироскопов  и суммарный
и суммарный  По измеренному направлению на Солнце
По измеренному направлению на Солнце  определяют время приложения к КА управляющего момента
определяют время приложения к КА управляющего момента  сил светового давления, который формируют путем разворота солнечной батареи. Выбор последней делают из условия противоположности знаков проекций
сил светового давления, который формируют путем разворота солнечной батареи. Выбор последней делают из условия противоположности знаков проекций  на ось, задаваемую вектором
на ось, задаваемую вектором  единичный вектор орбитальной угловой скорости, a
единичный вектор орбитальной угловой скорости, a  - средняя скорость изменения вектора
- средняя скорость изменения вектора  по ряду ранее измеренных его значений. В начальный и последующие моменты времени формирования
по ряду ранее измеренных его значений. В начальный и последующие моменты времени формирования  определяют проекции (G1 и Му1) векторов
определяют проекции (G1 и Му1) векторов  на указанную ось
на указанную ось  и на ось, направленную вдоль проекции вектора
и на ось, направленную вдоль проекции вектора  на плоскость орбиты (G2 и Му2). Углы разворотов и доворотов солнечной батареи находят из условий сравнения текущих (G1) и порогового (Gкр) значений соответствующих проекций при условии противоположности знаков проекций G2 и Мy2. При этом учитывают дискретность данных углов и периодичность (Δt) определения требуемого момента
на плоскость орбиты (G2 и Му2). Углы разворотов и доворотов солнечной батареи находят из условий сравнения текущих (G1) и порогового (Gкр) значений соответствующих проекций при условии противоположности знаков проекций G2 и Мy2. При этом учитывают дискретность данных углов и периодичность (Δt) определения требуемого момента  , а также заданную минимальную величину разгрузки за время Δt. Реализующая бортовая система КА содержит необходимые функциональные блоки и связи между ними. Изобретение обеспечивает разгрузку и непрерывную компенсацию возмущающего момента на КА с произвольным числом гироскопов, эффективно используя солнечные батареи для формирования управляющих моментов от сил светового давления, давая экономию рабочего тела и ресурса двигательных установок. 2 с.п. ф-лы, 7 ил.
, а также заданную минимальную величину разгрузки за время Δt. Реализующая бортовая система КА содержит необходимые функциональные блоки и связи между ними. Изобретение обеспечивает разгрузку и непрерывную компенсацию возмущающего момента на КА с произвольным числом гироскопов, эффективно используя солнечные батареи для формирования управляющих моментов от сил светового давления, давая экономию рабочего тела и ресурса двигательных установок. 2 с.п. ф-лы, 7 ил.
 измерение вектора кинетического момента
измерение вектора кинетического момента  в системе силовых гироскопов, определение суммарного вектора кинетического момента космического аппарата
в системе силовых гироскопов, определение суммарного вектора кинетического момента космического аппарата  измерение единичного вектора направления на Солнце
измерение единичного вектора направления на Солнце  и определение по нему расчетного времени приложения управляющего момента от сил солнечного светового давления к космическому аппарату, определение требуемого управляющего момента для воздействия на космический аппарат, формирование требуемого управляющего момента на космический аппарат путем разворота солнечных батарей в расчетный момент времени, отличающийся тем, что в текущий момент времени t по определенным в предыдущие моменты времени τ<t значениям суммарного вектора кинетического момента
и определение по нему расчетного времени приложения управляющего момента от сил солнечного светового давления к космическому аппарату, определение требуемого управляющего момента для воздействия на космический аппарат, формирование требуемого управляющего момента на космический аппарат путем разворота солнечных батарей в расчетный момент времени, отличающийся тем, что в текущий момент времени t по определенным в предыдущие моменты времени τ<t значениям суммарного вектора кинетического момента  устанавливают величину постоянной составляющей
устанавливают величину постоянной составляющей  скорости изменения вектора
скорости изменения вектора  выбирают солнечную батарею, при управлении которой формируется управляющий момент
выбирают солнечную батарею, при управлении которой формируется управляющий момент  от сил солнечного светового давления, удовлетворяющий условию
от сил солнечного светового давления, удовлетворяющий условию
MB1•Mу1<0,
где МВ1 и Му1 - проекции векторов  на ось, направление которой задается единичным вектором
на ось, направление которой задается единичным вектором 

где  - единичный вектор в направлении орбитальной угловой скорости космического аппарата,
- единичный вектор в направлении орбитальной угловой скорости космического аппарата,
в начальный момент времени t0 формирования управляющего момента определяют проекцию G1 суммарного вектора кинетического момента  на ось, направление которой задается вектором
на ось, направление которой задается вектором  определяют угол α0 между нормалью к плоскости выбранной солнечной батареи и проекцией вектора
определяют угол α0 между нормалью к плоскости выбранной солнечной батареи и проекцией вектора  на плоскость орбиты, при котором формируется управляющий момент, удовлетворяющий условиям Му1= -MВ1, если модуль проекции G1 < GKP, где GKP - пороговое значение вектора кинетического момента, Му1= -МВ1+ΔМ, если модуль проекции G1 ≥ GKP, где ΔM - изменение проекции управляющего момента на ось, направление которой задается вектором
на плоскость орбиты, при котором формируется управляющий момент, удовлетворяющий условиям Му1= -MВ1, если модуль проекции G1 < GKP, где GKP - пороговое значение вектора кинетического момента, Му1= -МВ1+ΔМ, если модуль проекции G1 ≥ GKP, где ΔM - изменение проекции управляющего момента на ось, направление которой задается вектором  создаваемое при развороте выбранной солнечной батареи на угол Δα, величина которого определяется дискретностью угла поворота солнечной батареи, при этом знак ΔМ противоположен знаку проекции G1, определяют проекции G2 и Му2 векторов
создаваемое при развороте выбранной солнечной батареи на угол Δα, величина которого определяется дискретностью угла поворота солнечной батареи, при этом знак ΔМ противоположен знаку проекции G1, определяют проекции G2 и Му2 векторов  на ось, направление которой совпадает с проекцией единичного вектора
на ось, направление которой совпадает с проекцией единичного вектора  на плоскость орбиты, затем на интервале времени от t0 до t1= t0+Δt, где Δt- периодичность определения требуемого управляющего момента, формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α0 в направлении, при котором выполняется условие sign(G2)= -sign(Mу2), в моменты времени t1= t0+i•Δt, i= 1, 2, . . . определяют проекцию G1 суммарного вектора кинетического момента
на плоскость орбиты, затем на интервале времени от t0 до t1= t0+Δt, где Δt- периодичность определения требуемого управляющего момента, формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α0 в направлении, при котором выполняется условие sign(G2)= -sign(Mу2), в моменты времени t1= t0+i•Δt, i= 1, 2, . . . определяют проекцию G1 суммарного вектора кинетического момента  на ось, направление которой задается вектором
на ось, направление которой задается вектором  определяют значение угла αi при котором формируется управляющий момент удовлетворяющий условиям My1= M'y1, если модуль проекции G1 < GKP или
определяют значение угла αi при котором формируется управляющий момент удовлетворяющий условиям My1= M'y1, если модуль проекции G1 < GKP или  где M'y1 - проекция управляющего момента, сформированного в момент времени ti-1; G'1 - значение проекции G1 в момент времени ti-1; ΔG- уставочное значение, определяющее минимальную величину разгрузки за время Δt; My1= M'y1+ΔM, если модуль проекции G1 ≥ GKP и
где M'y1 - проекция управляющего момента, сформированного в момент времени ti-1; G'1 - значение проекции G1 в момент времени ti-1; ΔG- уставочное значение, определяющее минимальную величину разгрузки за время Δt; My1= M'y1+ΔM, если модуль проекции G1 ≥ GKP и  определяют проекции G2 и Му2 векторов
определяют проекции G2 и Му2 векторов  на ось, направление которой совпадает с проекцией единичного вектора
на ось, направление которой совпадает с проекцией единичного вектора  на плоскость орбиты, на интервале времени от ti до ti+1 формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α1 в направлении, при котором выполняется условие sign(G2)= -sign(Mу2).
на плоскость орбиты, на интервале времени от ti до ti+1 формируют управляющий момент путем разворота выбранной солнечной батареи на угол, обеспечивающий текущую ориентацию солнечной батареи на Солнце, и доворота ее относительно этого положения на угол α1 в направлении, при котором выполняется условие sign(G2)= -sign(Mу2).
| СПОСОБ ФОРМИРОВАНИЯ РАЗГРУЗОЧНОГО МОМЕНТА ДЛЯ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЛНЕЧНЫМИ БАТАРЕЯМИ | 1992 |
|
RU2030338C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ВЫПОЛНЕНИИ ПРОГРАММНОГО РАЗВОРОТА | 1995 |
|
RU2098325C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 4325124 А, 13.04.1982 | |||
| US 5312073 А, 17.05.1994. | |||

