Изобретение относится к области управления угловым движением космических аппаратов (КА) с силовыми гироскопами (СГ) и поворотными солнечными батареями (СБ).
Известен способ формирования управляющих воздействий на КА (см. "Пленочные отражатели в космосе", А.В. Лукьянов, издательство Московского Университета, 1977 г., стр. 46-53), суть которого заключается в том, что управляющие воздействия на КА создаются при помощи использования давления потока солнечного излучения на специальную конструкцию - солнечный парус. Основной недостаток рассмотренного способа и системы заключен в том, что такое формирование управляющих воздействий требует создания сложного дополнительного устройства - солнечного паруса со своей системой управления.
Известен другой способ формирования управляющих воздействий на КА (см. "Управление орбитой стационарного спутника", Г.М. Чернявский, В.А. Бартенев, В. А. Малышев, Москва, "Машиностроение", 1984 г., стр. 104-108), позволяющий значительно упростить конструкцию солнечного паруса и систему управления, по технической сути наиболее близкий к предлагаемому изобретению и выбранный авторами в качестве прототипа.
Способ-прототип включает в себя измерение единичного вектора направления на Солнце  определение по нему и заданному приращению характеристической скорости космического аппарата
определение по нему и заданному приращению характеристической скорости космического аппарата  требуемого, ориентированного относительно направления на Солнце, управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, при котором эффективность этого воздействия максимальна, формирование требуемого управляющего воздействия на космический аппарат в течение заданного интервала времени путем раскрытия солнечного паруса в расчетный момент времени. Направление формируемого управляющего воздействия противоположно направлению на Солнце.
требуемого, ориентированного относительно направления на Солнце, управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, при котором эффективность этого воздействия максимальна, формирование требуемого управляющего воздействия на космический аппарат в течение заданного интервала времени путем раскрытия солнечного паруса в расчетный момент времени. Направление формируемого управляющего воздействия противоположно направлению на Солнце.
Основной недостаток способа-прототипа заключен в том, что его применение позволяет управлять только параметрами траектории движения КА и не решает вопроса управления кинетическим моментом КА, который непременно встает, так как при формировании управляющей силы формируется и момент. Управляющее воздействие всегда направлено в сторону, противоположную направлению на Солнце, а поэтому действует на КА только в той точке орбиты, где оно наиболее эффективно и в течение непродолжительного интервала времени, что ограничивает величину приращения характеристической скорости КА. Кроме того, для создания управляющего воздействия используется солнечный парус, который утяжеляет конструкцию и усложняет систему управления КА.
Техническим результатом, достигаемым данным изобретением, является формирование на КА и управляющих сил и моментов, что позволяет не только обеспечивать заданное изменение характеристической скорости, но и управление кинетическим моментом КА. Предлагаемый способ позволяет изменять направление действия силы относительно направления на Солнце, что дает возможность непрерывно формировать управляющие воздействия и, следовательно, обеспечить большее изменение характеристической скорости. Кроме того, предлагаемый способ использует для формирования управляющих воздействий существующие на КА солнечные батареи и не требует специального солнечного паруса.
Указанный технический результат достигается тем, что в способе формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями, включающем измерение единичного вектора направления на Солнце  определение по нему и заданному приращению характеристической скорости космического аппарата
определение по нему и заданному приращению характеристической скорости космического аппарата  требуемого, ориентированного относительно направления на Солнце, управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, формирование требуемого управляющего воздействия на космический аппарат в расчетный момент времени, в отличие от известного, начиная с текущего момента времени, через заданные интервалы времени измеряют вектор абсолютной угловой скорости космического аппарата
требуемого, ориентированного относительно направления на Солнце, управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, формирование требуемого управляющего воздействия на космический аппарат в расчетный момент времени, в отличие от известного, начиная с текущего момента времени, через заданные интервалы времени измеряют вектор абсолютной угловой скорости космического аппарата  измеряют вектор кинетического момента
измеряют вектор кинетического момента  в системе силовых гироскопов, определяют суммарный вектор кинетического момента космического аппарата
в системе силовых гироскопов, определяют суммарный вектор кинетического момента космического аппарата  сравнивают модуль кинетического момента космического аппарата G с предельно допустимым значением кинетического момента Gкp, если G<Gкp, то определяют максимальный угол разворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце αmax, при котором выполняется условие Jпp-Jн>ΔJ, где Jпр - ток притока от солнечных батарей, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления, определяют угол поворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце -π/2<α<π/2, при котором
сравнивают модуль кинетического момента космического аппарата G с предельно допустимым значением кинетического момента Gкp, если G<Gкp, то определяют максимальный угол разворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце αmax, при котором выполняется условие Jпp-Jн>ΔJ, где Jпр - ток притока от солнечных батарей, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления, определяют угол поворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце -π/2<α<π/2, при котором  для измеренного значения единичного вектора направления на Солнце, где
для измеренного значения единичного вектора направления на Солнце, где  управляющая сила от воздействия светового потока на поверхность солнечных батарей, если |α|<αmax, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол α относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
управляющая сила от воздействия светового потока на поверхность солнечных батарей, если |α|<αmax, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол α относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  то определяют
то определяют  составляющую вектора суммарного кинетического момента космического аппарата
составляющую вектора суммарного кинетического момента космического аппарата  в плоскости орбиты, если
в плоскости орбиты, если  , где Gгр - заданное граничное значение проекции суммарного кинетического момента космического аппарата на плоскость орбиты, при превышении которого требуется разгрузка накопленного кинетического момента от сил солнечного давления, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
, где Gгр - заданное граничное значение проекции суммарного кинетического момента космического аппарата на плоскость орбиты, при превышении которого требуется разгрузка накопленного кинетического момента от сил солнечного давления, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, выбирают солнечные батареи, при развороте которых на угол α1 формируемый управляющий момент
то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, выбирают солнечные батареи, при развороте которых на угол α1 формируемый управляющий момент  от сил солнечного давления на поверхность солнечных батарей удовлетворяет условию
от сил солнечного давления на поверхность солнечных батарей удовлетворяет условию  при развороте всех остальных солнечных батарей на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, формируют управляющее воздействие на космический аппарат, разворачивая выбранные солнечные батареи на угол α1, а все остальные солнечные батареи на угол sign(α)α2 относительно проекции на плоскость орбиты единичного вектора направления на Солнце, где α2 - максимальный угол разворота остальных солнечных батарей, при котором выполняется условие Jпр-Jн>ΔJ.
при развороте всех остальных солнечных батарей на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, формируют управляющее воздействие на космический аппарат, разворачивая выбранные солнечные батареи на угол α1, а все остальные солнечные батареи на угол sign(α)α2 относительно проекции на плоскость орбиты единичного вектора направления на Солнце, где α2 - максимальный угол разворота остальных солнечных батарей, при котором выполняется условие Jпр-Jн>ΔJ.
Одной из важнейших задач управления КА является задача управления параметрами орбиты. Для ее решения обычно используют реактивные или электромагнитные двигатели, которые способны создавать значительные по величине ускорения в течение коротких промежутков времени. Существуют решения этой задачи, использующие малые силы, непрерывно воздействующие на КА. Как пример, можно привести солнечный парус, использующий давление потока светового излучения Солнца на пленочную поверхность. Такие решения как правило более экономичны, и их выгодно использовать в тех случаях, когда не требуется создание больших управляющих воздействий, например, для поддержания в рабочей точке стационарного спутника. Предлагаемый способ использует в качестве солнечного паруса существующие на КА солнечные батареи. Основное назначение СБ - обеспечение КА электроэнергией, и, обычно, управление СБ осуществляется таким образом, чтобы их нормаль к активной поверхности была как можно ближе к направлению на Солнце. Однако, при проектировании СБ учитывается снижение электрических характеристик СБ в связи с их старением, поэтому, особенно в начальный период использования КА, ток притока электроэнергии от СБ значительно превышает ток потребления. Это позволяет, отклоняя СБ относительно направления на Солнце, решать не только задачу электропитания, но и задачу управления КА. Причем, так как при отклонении СБ относительно направления на Солнце создаются и силы и моменты, то таким образом можно управлять не только параметрами орбиты КА, но и суммарным кинетическим моментом КА.
Суть изобретения поясняется фиг 1-4. На фиг.1 приведена блок-схема предлагаемой системы, на фиг.2 - используемые системы координат, на фиг.3 - КА с солнечными батареями, на фиг.4 - силы солнечного давления на элементарную площадку.
Примером системы, реализующей данный способ, может служить система управления движения КА "Ямал 100". Блок-схема системы, приведенная на фиг.2, включает 1 - блок определения навигационных параметров (БОНП), 2 - датчики ориентации (ДОР), 3 - датчики угловой скорости (ДУС), 4 - блок измерения кинетического момента системы СГ (БИКМ), 5 - блок определения вектора суммарного кинетического момента (БОВСКМ), первый вход которого связан с выходом ДУС 3, а второй вход - с выходом БИКМ 4, 6 - система ориентации солнечных батарей (СОСБ), 7 - солнечные батареи (СБ), 8 - корпус КА, 9 - силовые гироскопы (СГ), 10 - блок определения углового положения КА (БОУП), первый вход которого связан с первым выходом БОНП 1, второй вход - с выходом ДОР 2, третий вход - с выходом ДУС 3, 11 - блок определения координат единичного вектора направления на Солнце в связанном базисе (БОВССБ), первый вход которого связан со вторым выходом БОНП 1, второй вход - с первым выходом БОУП 10, а выход - с первым входом СОСБ 6 и первым входом БОУВТО 15, 12 - блок определения параметров управления угловым движением (БОПУУД), первый вход которого связан со вторым выходом БОУП 10, второй вход - с выходом ДУС 3, третий вход - с выходом БОВСКМ 5, 13 - блок формирования управляющих сигналов на СГ (БФУССГ), вход которого связан с первым выходом БОПУУД 12, 14 - блок задания требуемого изменения характеристической скорости (БЗТИХС), 15 - блок определения управляющих воздействий от СД и требуемого отклонения СБ (БОУВТО), второй и третий входы которого связаны соответственно со вторым и третьим выходами БОПУУД 12, четвертый вход - с выходом БОВСКМ 5, пятый вход - с выходом БЗТИХС 14, а выход - со вторым входом СОСБ 6. Условно показано воздействие на СБ 7 сил солнечного давления и суммирование на корпусе КА 8 следующих моментов: управляющего момента от СГ 9 (MГ), суммарного момента всех внешних возмущающих сил (МВ) и управляющего момента (MУ) от СБ 7. Дополнительно приведена механическая связь СОСБ 6 с СБ 7, БФУССГ 13 с СГ 9 и СГ 9 с БИКМ 4, а также установка ДОР 2 и ДУС 3 на корпусе КА 8.
Работает система следующим образом. БОУП 10 на основе координат вектора угловой скорости  в связанной системе координат, поступающих с ДУС 3, и данных, поступающих с ДОР 2, формирует нормированный кватернион разворота А от выбранной инерциальной системы координат к связанной системе координат, путем интегрирования уравнения
в связанной системе координат, поступающих с ДУС 3, и данных, поступающих с ДОР 2, формирует нормированный кватернион разворота А от выбранной инерциальной системы координат к связанной системе координат, путем интегрирования уравнения
компоненты которого используются в БОВССБ 11, а также кватернион управления N, компоненты которого используются в БОПУУД 12. Кватернион N соответствует развороту от орбитального базиса к связанному
N = L-1•A,
где L - нормированный орбитальный кватернион, соответствующий развороту от выбранной инерциальной системы координат к орбитальной системе координат, формируемый БОНП 1, принцип работы которого подробно представлен в "Навигация, наведение и стабилизация в космосе" (Авторы Ч.С. Дрейпер и др. "Машиностроение", Москва, 1970 г. ). Оси связанной системы координат OXYZ направлены таким образом, что при поддержании орбитальной ориентации они совпадают с осями орбитальной системы координат и ось Х направлена на центр Земли, ось Z - противоположно вектору орбитальной угловой скорости, а ось Y дополняет их до правой тройки (см. фиг.2). На фиг.2 цифрами обозначены: 16 - Земля, 17 - траектория движения КА, 18 - направление падающего солнечного света, 19 - КА. БОВСКМ 5 формирует для БОПУУД 12 и БОУВТО 15 компоненты вектора суммарного момента  где J - тензор инерции КА. БОПУУД 12 формирует расчетное значение вектора требуемого управляющего момента для построения и поддержания ориентации КА
где J - тензор инерции КА. БОПУУД 12 формирует расчетное значение вектора требуемого управляющего момента для построения и поддержания ориентации КА  компоненты которого используются БФУССГ 13, и требуемый вектор орбитальной угловой скорости
компоненты которого используются БФУССГ 13, и требуемый вектор орбитальной угловой скорости  в связанном базисе
в связанном базисе  координаты которого используются в БОУВТО 15, здесь ω0 - модуль орбитальной скорости,
координаты которого используются в БОУВТО 15, здесь ω0 - модуль орбитальной скорости,  единичный вектор, направленный противоположно оси Z орбитальной системы координат. Кроме того, БОПУУД 12 формирует для БОУВТО 15 требование на формирование управляющего момента от сил солнечного давления. Требование на формирование управляющего момента от сил солнечного давления формируется при отсутствии проведения коррекции орбиты на двигателях, когда модуль суммарного кинетического момента не превышает заданного предельного значения и когда построена и поддерживается орбитальная ориентация, т.е.
единичный вектор, направленный противоположно оси Z орбитальной системы координат. Кроме того, БОПУУД 12 формирует для БОУВТО 15 требование на формирование управляющего момента от сил солнечного давления. Требование на формирование управляющего момента от сил солнечного давления формируется при отсутствии проведения коррекции орбиты на двигателях, когда модуль суммарного кинетического момента не превышает заданного предельного значения и когда построена и поддерживается орбитальная ориентация, т.е.  где δN - уставка, определяющая границы зоны нечувствительности по углу,
где δN - уставка, определяющая границы зоны нечувствительности по углу,
δω - уставка, определяющая границы зоны нечувствительности по угловой скорости,
I - единичный кватернион.
БФУССГ 13 использует компоненты вектора  для формирования сигналов на электрические двигатели, управляющие скоростями вращения СГ.
для формирования сигналов на электрические двигатели, управляющие скоростями вращения СГ.
БОВССБ 11 использует координаты единичного вектора направления на Солнце в выбранной инерциальной системе координат, формируемые БОНП 1 и компоненты кватерниона А из БОУП 10. По ним рассчитываются координаты единичного вектора направления на Солнце в связанной системе координат, используемые в СОСБ 6 и БОУВТО 15.

где RE - координаты единичного вектора направления на Солнце в связанной системе координат,
RI - координаты единичного вектора направления на Солнце в выбранной инерциальной системе координат.
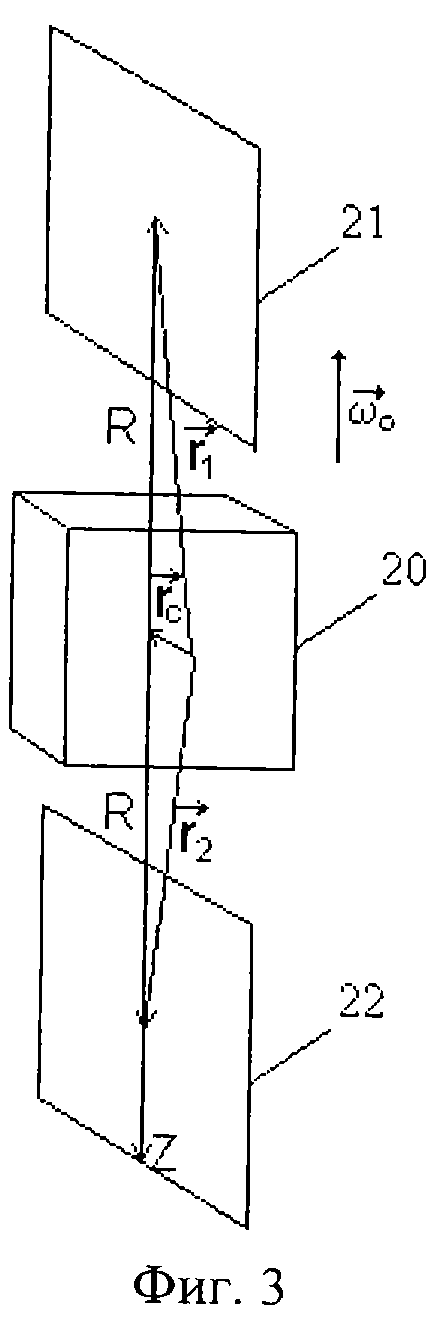
СОСБ 6 осуществляет разворот СБ 7 в требуемое положение. КА "Ямал-100" с поворотными СБ схематично представлен на фиг.3, где цифрами обозначены: 20 - центральный блок, 21 - СБ 1, 22 - СБ 2. Положение каждой СБ на КА "Ямал-100" задается углом поворота данной СБ относительно "исходного" положения. В исходном положении нормаль к рабочей поверхности СБ направлена противоположно оси Х связанной системы координат. Угол поворота измеряется в зонах (1 зона равна Δα≈2,81o): USB[0] - для первой СБ и USB[1] - для второй. Поворот осуществляется по часовой стрелке, если смотреть на батарею со стороны центрального блока.
По координатам единичного вектора на Солнце в связанной системе координат RE из БОВССБ 11 определяются положения СБ USB0[0] и USB0[1], при которых нормали батарей наиболее близки к проекции  на плоскость орбиты. Далее формируются
на плоскость орбиты. Далее формируются
USB[0]=USB0[0]+DZ[0] и
USB[1]=USB0[1]+DZ[1],
где DZ[0] и DZ[1] - поправки к положению соответствующих СБ относительно направления на Солнце, формируемые в БОУВТО 15. Затем СОСБ 6 осуществляет разворот СБ 7 при помощи электрических двигателей до тех пор, пока первая батарея не придет в зону USB[0]-2, a вторая - в зону USB[1]+2. После этого разворот батарей прекращается до тех пор, пока вследствие вращения КА они не придут соответственно в зоны USB[0]+2 и USB[1]-2. Далее снова осуществляется разворот и т.д.
Описание вышеуказанных блоков и их реализация на КА "Ямал 100" приведены в техническом описании "Система управления движением и навигацией" (300ГК. 12Ю000A-0TO).
Чтобы пояснить принцип работы БОУВТО 15, оценим силы и моменты, действующие на КА со стороны сил солнечного давления.
Силы, действующие со стороны света на элементарную площадку dS, изображены на фиг.4. Здесь 23 - площадка dS,  единичный вектор в направлении на Солнце,
единичный вектор в направлении на Солнце,  нормаль к поверхности. Сила
нормаль к поверхности. Сила
df=df1+df2;
df1 = -Pc(n•τ)τdS(1-ε0);
df2 = -2Pc(n•τ)2ndSε0,
здесь ε0 - коэффициент отражения, Рc - давление солнечного света.
Сила  и момент
и момент  действующий на спутник:
действующий на спутник:
MУ=М++М-;
M+ = Pcτ×∫(1-ε0)r(τ•n)dS;
M- = 2Pc∫ε0n×r(τ•n)2dS.
Интегрирование производится по всей освещенной поверхности КА.
Основной вклад в эти воздействия вносят силы, действующие на поверхность СБ, и в дальнейшем мы не будем учитывать воздействия, создаваемые силами солнечного давления на корпус КА.
КА "Ямал-100" снабжен двумя поворотными СБ, общая ось которых параллельна вектору орбитальной угловой скорости (см. фиг.4). Найдем проекции суммарного момента  на оси инерциальной системы координат OX0Y0Z0. Проинтегрировав по всей поверхности СБ и пренебрегая небольшими периодическими составляющими, возникающими из-за несовпадения центра масс с центром давления, получаем для проекций
на оси инерциальной системы координат OX0Y0Z0. Проинтегрировав по всей поверхности СБ и пренебрегая небольшими периодическими составляющими, возникающими из-за несовпадения центра масс с центром давления, получаем для проекций  на плоскость орбиты:
на плоскость орбиты:
MX = PcSε0cos2αcR(-sinα1cos2α1+sinα2cos2α2);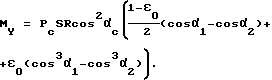
Здесь S - суммарная площадь СБ, R - расстояние от центра солнечного давления до центра симметрии каждой батареи,  угол между направлением на Солнце и плоскостью орбиты, где τX и τY - проекции единичного вектора направления на Солнце на оси связанной системы координат, α1 и α2 - углы поворота первой и второй батарей соответственно относительно положения, при котором нормаль батареи совпадает с проекцией
угол между направлением на Солнце и плоскостью орбиты, где τX и τY - проекции единичного вектора направления на Солнце на оси связанной системы координат, α1 и α2 - углы поворота первой и второй батарей соответственно относительно положения, при котором нормаль батареи совпадает с проекцией  на плоскость орбиты. Углы будем считать положительными, когда разворот происходит по часовой стрелке, если смотреть со стороны +Z0, а в противном случае - отрицательными.
на плоскость орбиты. Углы будем считать положительными, когда разворот происходит по часовой стрелке, если смотреть со стороны +Z0, а в противном случае - отрицательными.
У проекции вектора  на ось Z0 постоянная составляющая отсутствует и разворот СБ на углы α1 и α2 соответственно приводит к возникновению периодической составляющей, изменяющейся с орбитальной частотой и амплитудой
на ось Z0 постоянная составляющая отсутствует и разворот СБ на углы α1 и α2 соответственно приводит к возникновению периодической составляющей, изменяющейся с орбитальной частотой и амплитудой
MZ = PcSε0cos2αcA(sinα1cos2α1+sinα2cos2α2),
где А - расстояние от центра давления до центра масс КА.
Из приведенных соотношений видно, что разворот той или иной СБ относительно направления на Солнце приводит к возникновению управляющего момента, знак проекции которого на ось Y0 определяется тем, какую СБ повернули, а знак проекции этого момента на ось Х0 - тем, в какую сторону повернули данную батарею. Если разворачивать батареи на
одинаковые углы, то управляющий момент в орбитальной плоскости не создается.
Проекции управляющей силы  на оси связанной системы координат при развороте обеих батарей на угол α
на оси связанной системы координат при развороте обеих батарей на угол α

FZ = -PcS(1-ε0)cosαccosατZ,
где τX, τY, τZ - проекции единичного вектора направления на Солнце на оси связанной системы координат.
При отсутствии требования на формирование управляющего воздействия из БОПУУД 12, формирование управляющего воздействия не производится и требуемые отклонения СБ от ориентации на Солнце полагаются равными нулю, DZ[0]=DZ[1] для каждой батареи. Если же требование выставлено, то в начальный момент времени формирования управляющих воздействий численным методом определяется значение угла поворота -π/2<α<π/2, при котором скалярное произведение  принимает максимальное значение Nmax, где
принимает максимальное значение Nmax, где  - требуемое изменение характеристической скорости из БЗТИХС 14. Сравнивается значение полученного угла α с углом αmax≥0, где αmax определяется из соотношения Jmaxcosαmaxcosαc = Jн+ΔJ, где Jmax - максимальный ток притока от СБ, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления. Если |α|<αmax, то для разворота батарей на угол α определяют требуемые отклонения СБ
- требуемое изменение характеристической скорости из БЗТИХС 14. Сравнивается значение полученного угла α с углом αmax≥0, где αmax определяется из соотношения Jmaxcosαmaxcosαc = Jн+ΔJ, где Jmax - максимальный ток притока от СБ, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления. Если |α|<αmax, то для разворота батарей на угол α определяют требуемые отклонения СБ
DZ[0] = [-α/Δα];
DZ[1] = [α/Δα],
где квадратные скобки обозначают выделение целой части. Если |α|≥αmax, но Nmax≥0, то для разворота батарей на угол α′ = αmaxsign(α) определяют требуемые отклонения СБ
DZ[0] = [-α′/Δα];
DZ[1] = [α′/Δα].
Если |α|≥αmax и Nmax<0, то определяется  текущая составляющая вектора
текущая составляющая вектора  в плоскости орбиты. Если
в плоскости орбиты. Если  где Gгр - заданное граничное значение, определяющее границу зоны нечувствительности по кинетическому моменту, то для разворота батарей на угол α′ = αmaxsign(α) определяют требуемые отклонения СБ
где Gгр - заданное граничное значение, определяющее границу зоны нечувствительности по кинетическому моменту, то для разворота батарей на угол α′ = αmaxsign(α) определяют требуемые отклонения СБ
DZ[0] = [-α′/Δα];
DZ[1] = [α′/Δα].
Если  то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, величина которого определяет скорость разгрузки и не превышает αmax. Находят угол α2, решая уравнение Jmaxcosαc(cosα1+cosα2)/2 = Jн+ΔJ.
то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, величина которого определяет скорость разгрузки и не превышает αmax. Находят угол α2, решая уравнение Jmaxcosαc(cosα1+cosα2)/2 = Jн+ΔJ.
Отсюда
Далее, если при развороте первой и второй батареи соответственно на углы α1 и α2 расчетный управляющий момент удовлетворяет условию  то для разворота соответствующих батарей на углы α1 и α2 определяют требуемые отклонения СБ
то для разворота соответствующих батарей на углы α1 и α2 определяют требуемые отклонения СБ
DZ[0] = [-α1/Δα];
DZ[1] = [α2/Δα].
Если же  то для разворота соответствующих батарей на углы α2 и α1 определяют требуемые отклонения СБ
то для разворота соответствующих батарей на углы α2 и α1 определяют требуемые отклонения СБ
DZ[0] = [-α2/Δα];
DZ[1] = [α1/Δα].
Далее, через заданные интервалы времени Δt производится перерасчет управляющих воздействий и требуемых отклонений DZ[0] и DZ[1]. Наиболее удобно выбирать интервал времени Δt таким образом, чтобы за это время угловое перемещение Солнца относительно аппарата составляло одну зону, т.е. Δt≈10 мин.
Таким образом при развороте СБ в заданное положение создается управляющая сила, имеющая максимальную составляющую в направлении требуемого изменения характеристической скорости. На тех участках орбиты, где невозможно создать такую управляющую силу, создается управляющая сила, имеющая минимальную составляющую, противоположную требуемому изменению характеристической скорости, и управляющий момент  разгружающий накопленный кинетический момент гиродинов
разгружающий накопленный кинетический момент гиродинов
Для КА "Ямал-100" характерная величина требуемого изменения характеристической скорости для поддержания КА в рабочей точке по долготе ~1 м/с в год. Такое изменение создается при помощи проведения периодических маневров с использованием двигателей. Применение предлагаемого способа позволяет не только уменьшить требуемое суммарное изменение характеристической скорости в 10 раз, но и разгружать накопленный кинетический момент без дополнительных затрат топлива, следовательно, сэкономить топливо для других операций и без каких-либо дополнительных затрат увеличить срок службы КА, что для спутников связи ведет соответственно к уменьшению стоимости каналов связи.


Изобретение относится к области управления угловым и орбитальным движением космических аппаратов (КА). Предлагаемый способ использует повороты солнечных батарей КА на различные углы в солнечном потоке для формирования управляющих воздействий. Последние определяют по измеренному направлению на Солнце и заданному приращению характеристической скорости КА. Измеряют также кинетический момент в системе силовых гироскопов и определяют суммарный кинетический момент КА. Углы поворота солнечных батарей определяют с учетом предельно допустимой разницы между током, генерируемым батареями, и потребляемым на борту КА. Кроме того, прогнозируют насыщение силовых гироскопов от моментов сил солнечного давления и при необходимости заблаговременно разворачивают по крайней мере некоторые солнечные батареи на углы, создающие моменты разгрузки гироскопов. Изобретение позволяет без специального солнечного паруса изменять направление действия силы относительно направления на Солнце, непрерывно формируя управляющие воздействия и обеспечивая большее изменение характеристической скорости КА. 4 ил.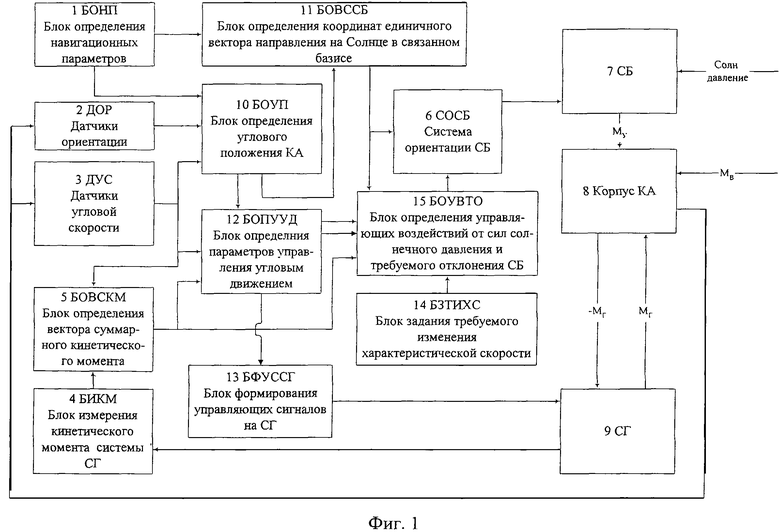
Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями, включающий измерение единичного вектора направления на Солнце  определение по нему и заданному приращению характеристической скорости
определение по нему и заданному приращению характеристической скорости  космического аппарата требуемого ориентированного относительно направления на Солнце управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, формирование требуемого управляющего воздействия на космический аппарат в расчетный момент времени, отличающийся тем, что, начиная с текущего момента времени, через заданные интервалы времени измеряют вектор абсолютной угловой скорости космического аппарата
космического аппарата требуемого ориентированного относительно направления на Солнце управляющего воздействия на космический аппарат и расчетного времени приложения управляющего воздействия к космическому аппарату, формирование требуемого управляющего воздействия на космический аппарат в расчетный момент времени, отличающийся тем, что, начиная с текущего момента времени, через заданные интервалы времени измеряют вектор абсолютной угловой скорости космического аппарата  измеряют вектор кинетического момента
измеряют вектор кинетического момента  в системе силовых гироскопов, определяют суммарный вектор кинетического момента космического аппарата
в системе силовых гироскопов, определяют суммарный вектор кинетического момента космического аппарата  сравнивают модуль кинетического момента космического аппарата G с предельно допустимым значением Gкр кинетического момента и если G<Gкр, то определяют максимальный угол αmax разворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце, при котором выполняется условие Jпр-Jн>ΔJ, где, Jпр - ток притока от солнечных батарей, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления, определяют в интервале -π/2<α<π/2 угол поворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце, при котором
сравнивают модуль кинетического момента космического аппарата G с предельно допустимым значением Gкр кинетического момента и если G<Gкр, то определяют максимальный угол αmax разворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце, при котором выполняется условие Jпр-Jн>ΔJ, где, Jпр - ток притока от солнечных батарей, Jн - ток нагрузки, ΔJ - предельно допустимое значение разницы тока притока и потребления, определяют в интервале -π/2<α<π/2 угол поворота нормали к активной поверхности солнечных батарей относительно проекции на орбитальную плоскость единичного вектора направления на Солнце, при котором  для измеренного значения единичного вектора направления на Солнце, где
для измеренного значения единичного вектора направления на Солнце, где  управляющая сила от воздействия светового потока на поверхность солнечных батарей, и если |α|<αmax, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол α относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
управляющая сила от воздействия светового потока на поверхность солнечных батарей, и если |α|<αmax, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол α относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  то определяют
то определяют  составляющую вектора суммарного кинетического момента космического аппарата
составляющую вектора суммарного кинетического момента космического аппарата  в плоскости орбиты, если
в плоскости орбиты, если  ≤Gгр, где Gгp - заданное граничное значение проекции суммарного кинетического момента космического аппарата на плоскость орбиты, при превышении которого требуется разгрузка накопленного кинетического момента от сил солнечного давления, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если
≤Gгр, где Gгp - заданное граничное значение проекции суммарного кинетического момента космического аппарата на плоскость орбиты, при превышении которого требуется разгрузка накопленного кинетического момента от сил солнечного давления, то формируют управляющее воздействие на космический аппарат, разворачивая солнечные батареи на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, если  >Gср, то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, выбирают солнечные батареи, при развороте которых на угол α1 формируемый управляющий момент
>Gср, то определяют угол α1 = (αmax-dα)sign(α), где dα - уставочный угол разворота солнечных батарей относительно максимального значения для разгрузки накопленного кинетического момента, выбирают солнечные батареи, при развороте которых на угол α1 формируемый управляющий момент  от сил солнечного давления на поверхность солнечных батарей удовлетворяет условию
от сил солнечного давления на поверхность солнечных батарей удовлетворяет условию  при развороте всех остальных солнечных батарей на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, формируют управляющее воздействие на космический аппарат, разворачивая выбранные солнечные батареи на угол α1, а все остальные солнечные батареи на угол sign(α)α2 относительно проекции на плоскость орбиты единичного вектора направления на Солнце, где α2 - максимальный угол разворота остальных солнечных батарей, при котором выполняется условие Jпр-Jн>ΔJ.
при развороте всех остальных солнечных батарей на угол sign(α)αmax относительно проекции на плоскость орбиты единичного вектора направления на Солнце, формируют управляющее воздействие на космический аппарат, разворачивая выбранные солнечные батареи на угол α1, а все остальные солнечные батареи на угол sign(α)α2 относительно проекции на плоскость орбиты единичного вектора направления на Солнце, где α2 - максимальный угол разворота остальных солнечных батарей, при котором выполняется условие Jпр-Jн>ΔJ.
| ЧЕРНЯВСКИЙ Г.М., БАРТЕНЕВ В.А | |||
| и др | |||
| Управление орбитой стационарного спутника | |||
| - М.: Машиностроение, 1984, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| СПОСОБ ФОРМИРОВАНИЯ РАЗГРУЗОЧНОГО МОМЕНТА ДЛЯ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЛНЕЧНЫМИ БАТАРЕЯМИ | 1992 |
|
RU2030338C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ВЫПОЛНЕНИИ ПРОГРАММНОГО РАЗВОРОТА | 1995 |
|
RU2098325C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 4325124 А, 13.04.1982 | |||
| US 5312073 А, 17.05.1994. | |||

