со со
со
а:
заданной частоте вращения ведущего вала, так как дальнейщее уменьшение относительных размеров ступицы приводит к соударениям роликов между собой, а увеличение диаметра ступицы уменьшает относительные амплитуду колебаний и массы роликов.
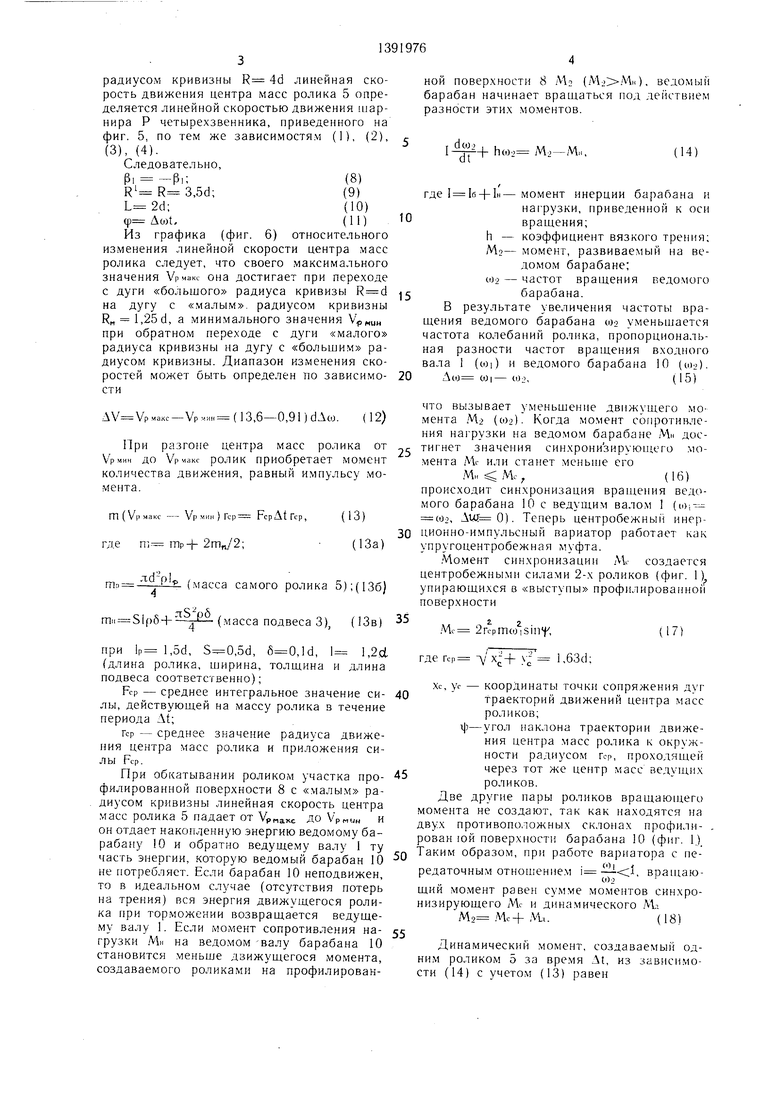
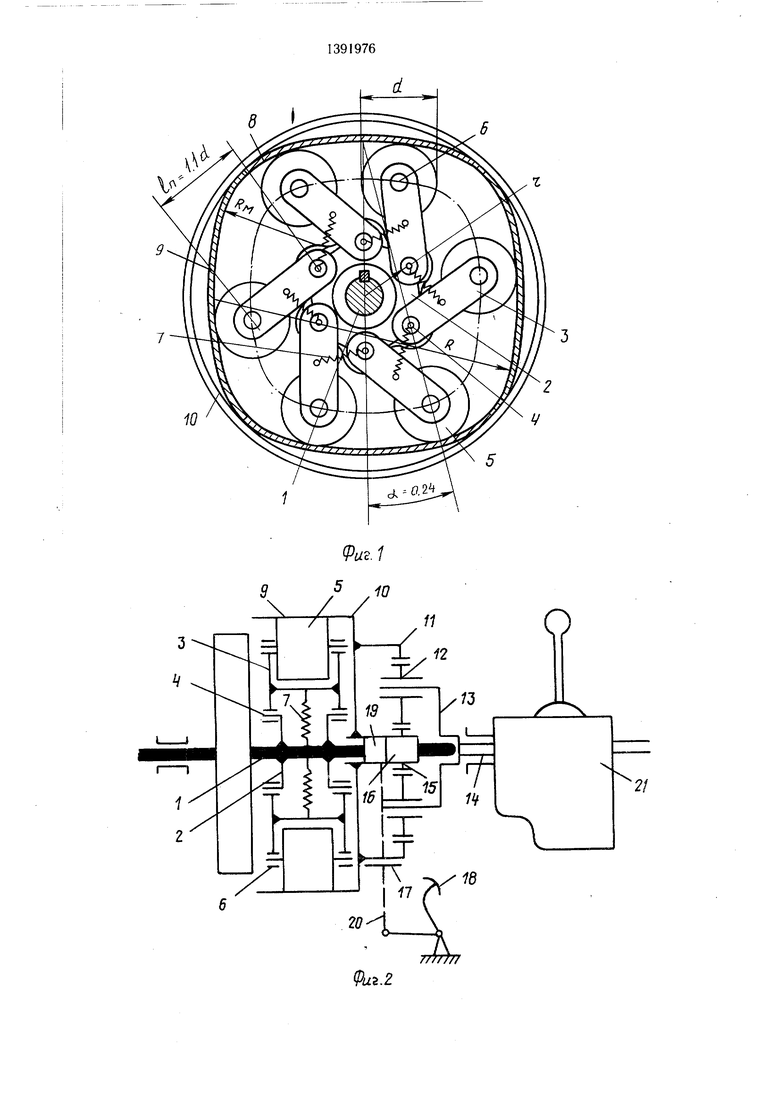
Профилированная поверхность, обкатываемая роликами, конструктивно выполнена в виде четырех скоб 9, вложенных в кругяжелых конвейеров и станков, автомати- 10 лый ведомый барабан 10. еских дверей городского транспорта и т.д.На кинематической схеме силовой передачи (фиг. 2) показано, что барабан 10 жестко соединен с внешним венцом 11 дифференциального механизма с числом зубьqnopTHbix средств.. ев Z2, который через сателлиты 12, установI Целью изобретения является улучшение ленные на водиле 13, соединен с выходным эксплуатационных показателей путем согласования нагрузочных характеристик вариатора с эксплуатационными нагрузками.
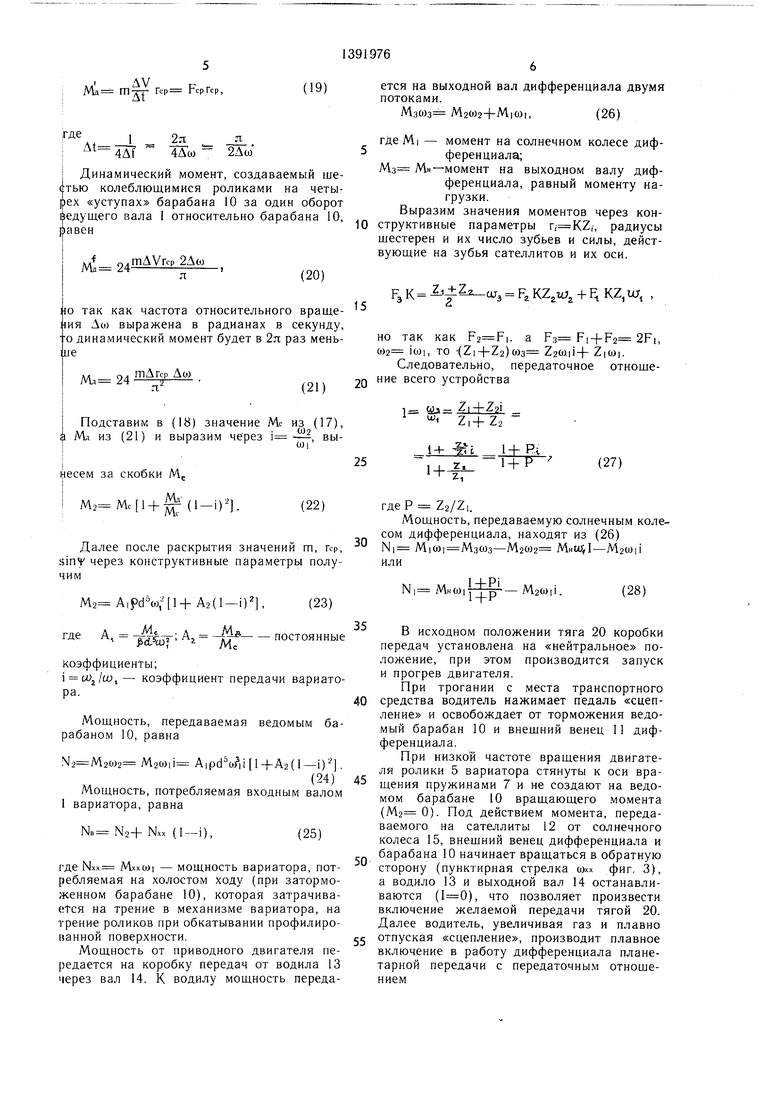
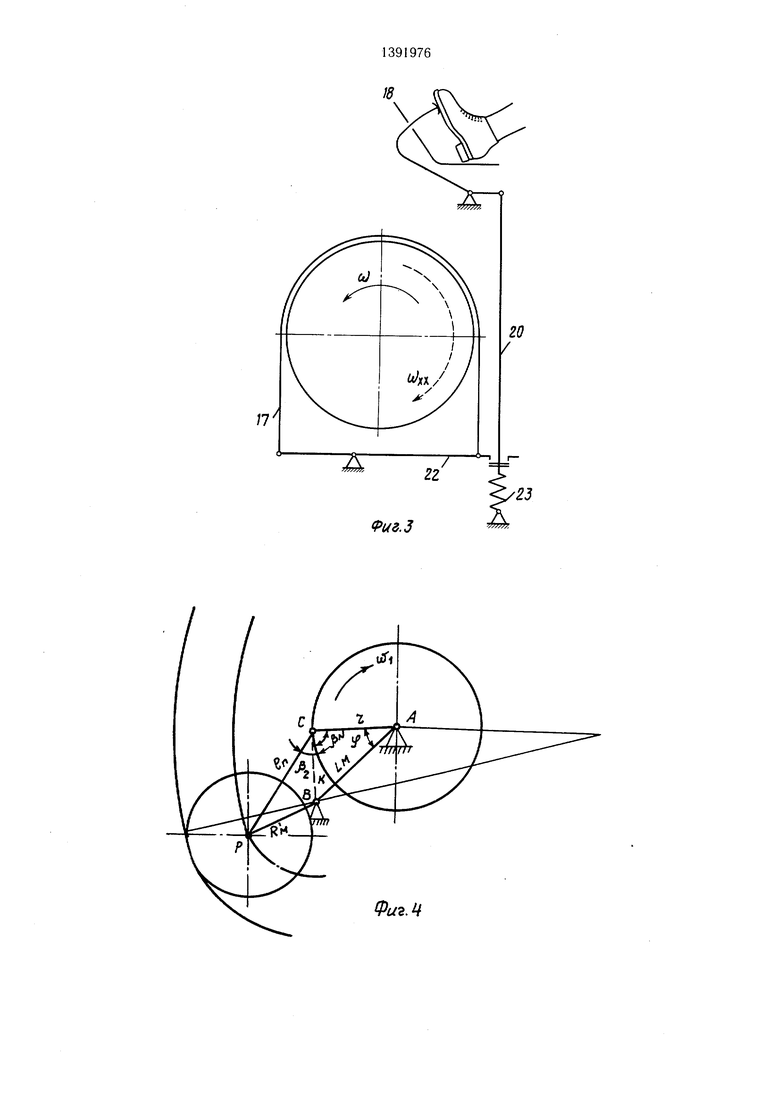
На фиг. 1 показан центробежный инерционно-импульсный вариатор, поперечный разрез; на фиг. 2 - кинематическая схема силовой передачи; на фиг. 3 -. однонаправленный ленточный тормоз, взаимодействующий с ведомым профили- рэванным барабаном и выполняющий (функцию «сцепление в современных, транспортных средствах, поперечный разрез;
; Изобретение относится к механике, а 1менно автоматическим силовым передачам, и может быть использовано в маши- .шх с большой инерционной нагрузкой, момент инерции которой на несколько по- РЯД.КОВ превышает собственный момент инерции приводного двигателя и для разгона такой нагрузки необходимо авто.матиче- ( изменить передаточные отношения в заданных пределах, например, в приводах
Наибольший эффект может быть получен ри использовании изобретения в качестве Полуавтоматической силовой передачи траннЬ фиг. 4 - кинематическая схема, отра- ж5ающая связь конструктивных параметров вариатора при обкатывании роликом провалом 14 дифференциала. Солнечное колесо 15 с числом зубьев Zi соединено с входным валом 1 вариатора через механизм блокировки 16. Однонаправленный тормоз 20 17 удерживает барабан 10 от вращения в обратную сторону при низкой частоте вращения входного вала 1. Педаль 18 «сцепление служит для управления однонаправленным тормозом 17 и механизмом блокировки 16 при помощи муфты 19 и тяги 20. Выходной вал 14 дифференциала соединен с нагрузкой через шестеренчатую коробку передач 21.
Вариант реализации однонаправгленного ленточного тормоза 17 приведен на фиг. 3.
25
филированной поверхности с радиусом кри- ,Q Здесь лента тормоза 17 соединена с неравно35
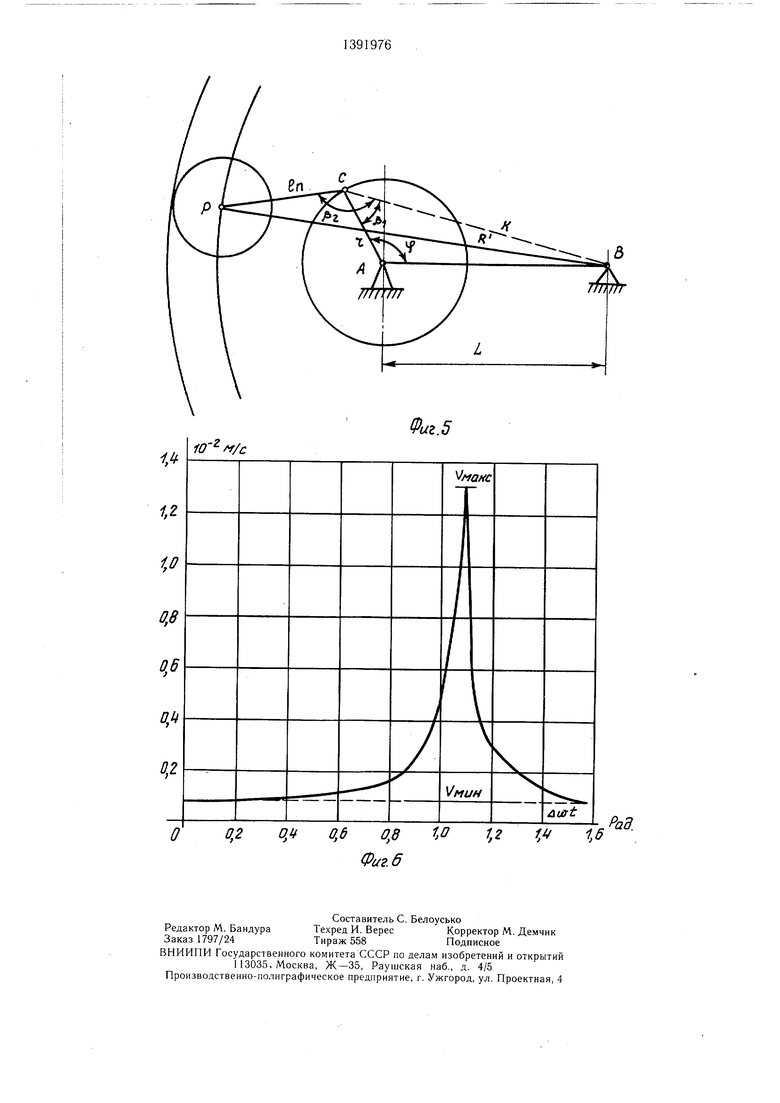
визны l,254d, LM 0,94d; на фиг. 5 - кинематическая связь конструктивных параметров вариатора при обкатывании роликом профилированной поверхности с радиусом кривизны и на фиг. 6 - график изменения линейной скорости центра масс ролика за 1/4 оборота ведущего вала относительно ведомого барабана.
Центробежный инерционно-импульсный в риатор (основной элемент силовой передачи), содержит входной вал 1, связанный с валом приводного двигателя. На валу 1 установлена ступица 2 с ше.стью проушинами, выполненными на расстоянии ,7dVP от оси вращения входного вала 1. В проушинах установлены подвесы 3 при помощи осей 4. На свободных концах подвесов на расстоянии 1„ l,ld установлены инерционные ролики 5 с наружным диаметром d при помощи осей 6. Ролики стянуты пружинами 7 к оси вращения вала 1. При повы- щенных оборотах (за счет центробежных 2 сил) ролики 5 обкатывают профилированную гп поверхность 8 ведомого барабана, выполненную в виде четырех цилиндрических поверхностей с радиусом кривизны R l,254d, которые сопряжены с цилиндрическими поверхностями с радиусом кривизны . 55
Такое выполнение близко к оптимальному по массогабаритным показателям на единицу передаваемой мощности при
плечим рычагом 22. Отключение однонаправленного тормоза осуществляется педалью 18 «сцепление через тягу 20. Возврат педали 18 осуществляется пружиной 23.
Вариатор работает следующим образом.
При безотрывном обкатывании роликом 5 профилированной поверхности 8 с радиусом кривизны RM можно найти линейную скорость центра масс ролика 5, как скорость щарнира Р, движущегося по радиусу R в составе четырехзвенника САВР (фиг. 4) по фор- 40 муле
R rsin(pi+P2)Au) К sin Ра
45
где К ВС +г -2Ьмгсо5ф, Р| arcsin(LM /К)з1пф;
arccos
КЧ R ЖТ
R RM 5
LM LM;
0, Aojt 0,482.
(1)
(2) (3)
(4)
(5) (6) (7)
При безотрывном обкатывании роликом участка профилированной поверхности 8 с
ленные на водиле 13, соединен с выходным
валом 14 дифференциала. Солнечное колесо 15 с числом зубьев Zi соединено с входным валом 1 вариатора через механизм блокировки 16. Однонаправленный тормоз 17 удерживает барабан 10 от вращения в обратную сторону при низкой частоте вращения входного вала 1. Педаль 18 «сцепление служит для управления однонаправленным тормозом 17 и механизмом блокировки 16 при помощи муфты 19 и тяги 20. Выходной вал 14 дифференциала соединен с нагрузкой через шестеренчатую коробку передач 21.
Вариант реализации однонаправгленного ленточного тормоза 17 приведен на фиг. 3.
Здесь лента тормоза 17 соединена с неравноЗдесь лента тормоза 17 соединена с неравно
VP 2
плечим рычагом 22. Отключение однонаправленного тормоза осуществляется педалью 18 «сцепление через тягу 20. Возврат педали 18 осуществляется пружиной 23.
Вариатор работает следующим образом.
При безотрывном обкатывании роликом 5 профилированной поверхности 8 с радиусом кривизны RM можно найти линейную скорость центра масс ролика 5, как скорость щарнира Р, движущегося по радиусу R в составе четырехзвенника САВР (фиг. 4) по фор- муле
VP 2 п 5
R rsin(pi+P2)Au) К sin Ра
5
где К ВС +г -2Ьмгсо5ф, Р| arcsin(LM /К)з1пф;
arccos
КЧ R ЖТ
R RM 5
LM LM;
0, Aojt 0,482.
(1)
(2) (3)
(4)
(5) (6) (7)
При безотрывном обкатывании роликом участка профилированной поверхности 8 с
радиусом кривизны R 4d линейная скорость движения центра масс ролика 5 определяется линейной скоростью движения шарнира Р четырехзвенника, приведенного на фиг. 5, по тем же зависимостям (1), (2), (3), (4).
Следовательно,
Pi pi;(8)
,5d;(9)
(10)
ф Ao)t,(11)
Из графика (фиг. 6) относительного изменения линейной скорости центра масс ролика следует, что своего максимального значения Урмакс она достигает при переходе с дуги «большого радиуса кривизы на дугу с «малы.м. радиусом кривизны К.„ l,25d, а минимального значения Ур„ин при обратном переходе с дуги «малого радиуса кривизны на дугу с «большим радиусом кривизны. Диапазон изменения скоростей может быть определен по зависимости
AV VP макс-VP «и„ (13,6-0,9 i) dAoj. (12)
При разгоне центра масс ролика от до Урмакс ролик приобретает момент количества движения, равный импу.аьсу .момента.
т(УрмаксУрми„)Гср FcpAtrcp,(13)
где т- Пр-)-2mn/2; (13а)
ГПз
.Td - pl
(масса самого ролика 5);(136)
m,,-- Slp6-|- J
(масса подвеса 3), (3в) 35
4
ной поверхности 8 .Мз (.), ведомый барабан начинает вращаться под действием разности
этих моментов.
14тг+ h(o.M,-Ми, dt
:i4i
0
5
0
5
0
где 1 1б -|- 1н
момент инерции барабана и на1 рузки, приведенной к оси вращения;
h - коэффициент вязкого трения; М2- момент, развиваемый на ведомом барабане; to2 - частот вращения ведомого
барабана.
В результате увеличения частоты вращения ведомого барабана шо уменьшается частота колебаний ролика, пропорциональная разности частот вращения входного вала 1 (coi) и ведомого барабана 10 (ш).
Д(.0 С0| 032,(15)
что вызывает уменьщение движ щего мо- .мента М2 (Ю2). Когда момент сопротивления на1 рузки на ведо.мо.м барабане Мн достигнет значения синхронизируюпи го момента Мс или станет меньн е его
,,(16)
происходит синхронизация вращения ведомого барабана 10 с ведущим валом 1 (ю,-- (02, ). Теперь центробежньп инер- ционно-и.мпульсный вариатор работает как упругоцентробежная муфта.
.Момент синхронизации М- создается центробежными силами 2-х роликов (фиг. 1) упирающихся в «выступы профилированной поверхности
2,2
Мс 2гсртсо1з1п,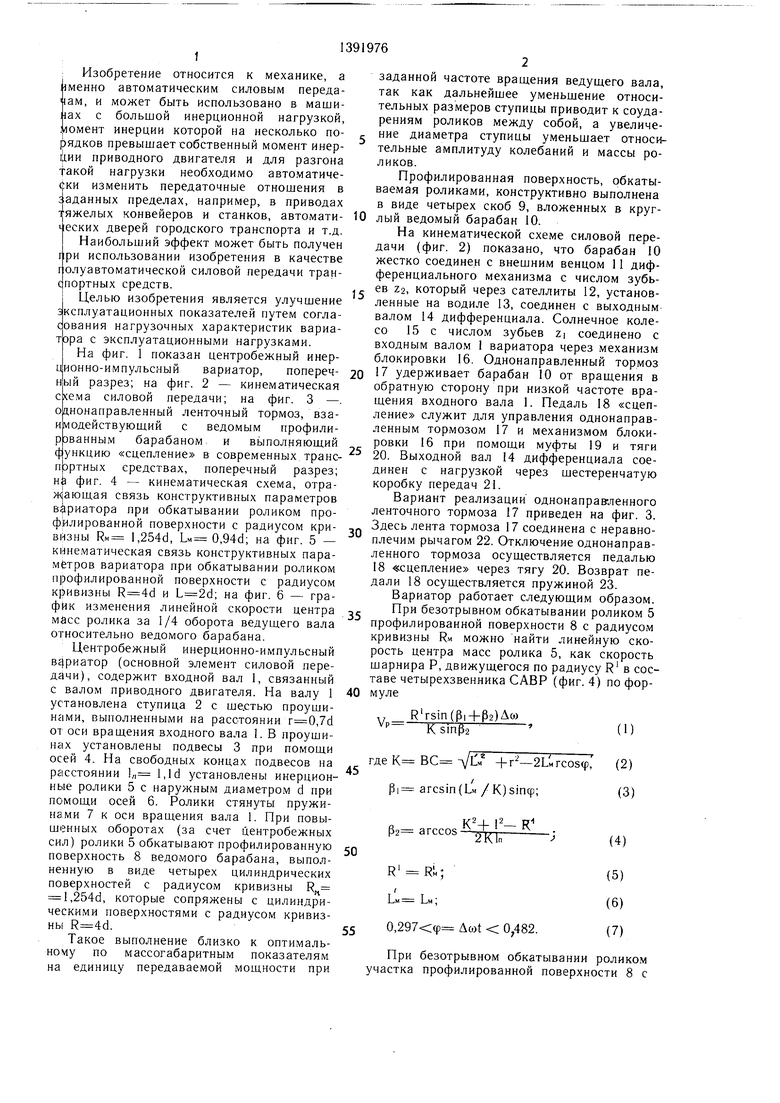

| название | год | авторы | номер документа |
|---|---|---|---|
| Силовая передача | 1984 |
|
SU1238985A1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
| АВТОМАТИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА | 2014 |
|
RU2558414C2 |
| ИНЕРЦИОННАЯ ТРАНСМИССИЯ | 1994 |
|
RU2160191C2 |
| АВТОМАТИЧЕСКИЙ ЦЕНТРОБЕЖНО-ИНЕРЦИОННЫЙ ВАРИАТОР | 2008 |
|
RU2403469C2 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2020336C1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА С ГОЛОНОМНЫМ ВАРИАТОРОМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2011555C1 |
Изобретение .относится к механике и предназначено для автоматизации нодбора передаточного отношения при разгоне инерционной нагрузки при ограниченной .мощности приводного двигателя. Цель изобретения - улучшение эксплуатационных показателей путем согласования нагрузочны.х характеристик вариатора с эксплуатационными нагрузками. Между шестеренчатой коробкой передач, управляемой вручную, и центробежным инерционно-импульсным вариатором установлен дифференцпа., ведомый барабан которого снабжен однонаправленным тормозом, управляемым от педали «сцепление, а солнечное ко. юсо дифференциала соединено с ва.чом приводного двигателя через механизм б/юкировки, управля- е.мый от педали «сцеиление. На ведущем валу вариатора установлено шесть ро.-щков диа.метром d на качающихся подвесах д/щ- ной 1 (0,9-2)d, оси качания подвесов установлены на расстоянии г(0,5-l,2)d, профилированная повер.хиость ведомого барабана вьиюлнена из четырех во1 путых поверхностей с радиусом кривизны RM 
при 1р l,5d, ,5d, ,Id, 1 l,2d (длина ролика, ширина, толш,ина и длина подвеса соответственно);
Fcp - среднее интегральное значение силы, действующей на массу ролика в течение периода At;
Гер - среднее значение радиуса движения центра масс ролика и приложения силы Fcp.
При обкатывании роликом участка профилированной поверхности 8 с «малы.м радиусом кривизны линейная скорость центра масс ролика 5 падает от Ур„ахс до Ург,цн и он отдает накопленную энергию ведомому барабану 0 и обратно ведущему валу 1 ту часть энергии, которую ведомый барабан 10 не потребляет. Если барабан 10 неподвижен, то в идеальном случае (отсутствия потерь на трения) вся энергия движущегося ролика при тор.можении возвращается ведущему валу 1. Если момент сопротивления нагрузки ЛЪ. на ведомом -валу барабана 10 становится меньще движущегося момента, создаваемого роликами на профилировангде Гср д, yj 1,63d;
Хс, УС - координаты точки сопряжения дуг траекторий движений центра масс роликов;
J)-угол наклона траектории движения центра масс ролика к окружности радиусо.м Гер, проходящей через тот же центр масс ведуп их роликов.
Две другие пары роликов вращающего момента не создают, так как находятся на двух противоположных склонах профилирован ой поверхности барабана 10 (фиг. 1) Таким образом, при работе вариатора с передаточным отношением , вращающий момент равен сумме моментов синхронизирующего jHc и динамического .М-.
М2 .Мс-4-Мч.(18)
Динамический момент, создаваемый од- ни.м роликом 5 за время At, из зависимости (14) с учетом (13) равен
n}-f-r- Гср FcpTcp,
(19)
1
4Д
4Доз 2Aoj
I Динамический момент, создаваемый ше- (|тью колеблющимися роликами на четырех «уступах барабана 10 за один оборот федущего вала 1 относительно барабана 10, |1авен
м ,
л
(20)
0 так как частота относительного вращения Aoj выражена в радианах в секунду, О динамический момент будет в 2л раз меньше
Мг 24
(21;
Подставим в (18) значение Мс из (17), и Мг из (21) и выразим через , вынесем за скобки М
+ (l-i).
(22)
Далее после раскрытия значений ш, гср, siny через конструктивные параметры получим
М2 AipdV l+A2(l-i)
(23)
где
А -М«- А - - (,45,jiz г Hji
постоянные
г - д
коэффициенты;
i u;j/uj,- коэффициент передачи вариатора.
Мощность, передаваемая ведомым барабаном 10, равна
N2 M20J2 M20,i A2().
(24) 45
Мощность, потребляемая входным валом 1 вариатора, равна
NB N2+ Nxx (1-i),
(25)
де Nxx Mxxoji - мощность вариатора, потребляемая на холостом ходу (при заторможенном барабане 10), которая затрачивается на трение в механизме вариатора, на трение роликов при обкатывании профилированной поверхности.
Мощность от приводного двигателя передается на коробку передач от водила 13 через вал 14. К водилу мощность передается на выходной вал дифференциала двумя потоками.
МзО)з M2032 + M|OJi,(26)
гДеМ| - момент на солнечном колесе диф- ференциала;
Мз Мн-момент на выходном валу дифференциала, равный моменту нагрузки.
Выразим значения моментов через кон- структиБные параметры ,, радиусы шестерен и их число зубьев и силы, действующие на зубья сателлитов и их оси.
15
,KZ,uJ, + F,KZ,W, ,
но так как . а РЗ р1 + р2 2Pi,
032 ioJl, то (Z|-|-Z2)033 Z201|i+ ZiOJi.
Следовательно, передаточное отноще- ние всего устройства
1: OJ3- Z|+Z2i Z,+ Z2
i+ i 1-f p.i
1+1+p
(27)
гдеР Z2/Z,.
Мощность, передаваемую солнечным колесом дифференциала, находят из (26)
NI М|0)1 Мз0 з-M20J2 Мн141 - M20Jii
или
1 -l-Pi
N1 МнОЗГ. Тр - M20J|i .
(28)
5
0
5
0
5
В исходном положении тяга 20 коробки передач установлена на «нейтральное положение, при этом производится запуск и прогрев двигателя.
При трогании с места транспортного средства водитель нажимает педаль «сцепление и освобождает от торможения ведомый барабан 10 и внешний венец 11 дифференциала.
При низкой частоте вращения двигателя ролики 5 вариатора стянуты к оси вращения пружинами 7 и не создают на ведомом барабане 10 вращающего .момента (). Под действием момента, передаваемого на сателлиты 12 от солнечного колеса 15, внешний венец дифференциала и барабана 10 начинает вращаться в обратную сторону (пунктирная стрелка шхх фиг. 3), а водило 13 и выходной вал 14 останавливаются (), что позволяет произвести включение желаемой передачи тягой 20. Далее водитель, увеличивая газ и плавно отпуская «сцепление, производит плавное включение в работу дифференциала планетарной передачи с передаточным отноще- нием
I 1 + P-0 1
- p - i+p
так как передаточное отношение вариатора равно нулю (i 0).
Далее, по мере увеличения частоты вращения вала 1, ролики 5, преодолевая усилие пружин 7, расходятся и начинают обкатывать профилированную поверхность 8, и на ведомом барабане 10 возникает момент Мг. Когда момент Мг достигает значе- ния Мг Мн- , ведамый барабан 10 начинает вращаться в прямом направлении (сплошная стрелка фиг. 3), при этом передаточное отношение становится равным
-Pi
1
где передаточное отношение вариатора i изменяется от О до 1. Когда момент со- против 1ения на ведомом барабане станет равным моменту синхронизации (), и передаточное отношение станет равным единице и ведомый барабан 10 с внешним венцом 11, сателлитами 12 и водилом 13 начнут вращаться синхронно, что обеспечивает минимальные энергетические потери и износ только в опорных подшипниках.
При изменении дорожной обстановки и необходимости изменить передаточное отношение коробки передач водитель сбрасывает «газ (т.е. уменьшает частоту вращения вала 1), но вследствие того, что вариа- тор работает в режиме упругой центробежной муфты, разъединения двигателя с нагрузкой не происходит и происходит торможение двигателем. Для разъединения ведущего вала от ведо.мого необходимо нажать педаль «сцепление и разъединить меха- низм блокировки 16 через муфту 19 и тягу 20 (фиг. 2). В результате разъединения силовой передачи солнечное колесо 15 гиожет обгонять приводной вал I, что позволяет включить новую передачу в соответствии с дорожной обстановкой. После переключе- ния передачи педаль 18 «с.цепление отпускается и прибавляется «газ. Если момент нагрузки, приведенной к ведомому барабану 10 вариатора после включения новой передачи, превышает момент синхронизации Мн Мс, происходит пробуксовка и трансформация вращающего момента. По мере выхода на новый режим работы вновь
0
5
5
0
- с 0
происходит синхронизация вращения валов и вариатор работает как упругая центробежная .муфта.
Формула изобретения
10
(Puc.1
11
О
21
Фиг.З
Фиг.И
| Силовая передача | 1984 |
|
SU1238985A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
