Изобретение относится к области демпфирования и гашения механических колебаний и может быть использовано для гашения вредных колебаний в различных механических системах.
Известен способ гашения вертикальных колебаний объекта (патент RU 2399807, МПК F16F 15/023, F16F 9/05, опубл. 20.09.2010), осуществляемый за счет периодического уменьшения восстанавливающей силы основного пневматического упругого элемента подвески путем подведения в начале каждого хода отбоя дополнительной массы газа к дополнительному упругому элементу от автономного источника энергии. При этом дополнительно кратковременно создают за счет вспомогательного демпфирующего электромагнитного элемента электромагнитную силу, воздействующую на амортизируемый объект, а в начале каждого хода сжатия отводят дополнительную массу газа из дополнительного упругого элемента в атмосферу.
Недостатком способа является ограниченность действия электромагнитной силы вспомогательного демпфирующего электромагнитного элемента в течение хода сжатия, т.к силы отталкивания между одноименными полюсами постоянных магнитов, создаваемые электромагнитной силой в конце хода сжатия, имеют наибольшее значение и противодействуют перемещению подвижной части подвески при малых расстояниях между магнитами кратковременно, что означает резкое увеличение жесткости подвески в конце хода.
Известен способ пневматической и магнитной амортизации (патент RU 2437009, МПК F16F 6/00, F16F 9/04, опубл. 20.12.2011), в котором между подвижными и неподвижными элементами системы размещают пневматический упругий элемент с переменным объемом и давлением газа и пневматический элемент постоянного объема, между которыми размещают постоянные магниты и клапанное устройство, согласно способу в начале хода отбоя энергия сжатого газа и энергия магнитного поля системы постоянных магнитов отдаются амортизируемому объекту, при этом для снижения жесткости подвески давление газа в объемах за счет их кратковременного соединения выравнивается, что ведет к дополнительному демпфированию колебаний амортизируемого объекта.
Недостаток способа заключается в ограниченности периода действия сил отталкивания между одноименными полюсами постоянных магнитов, т.к. они имеют наибольшее значение и противодействуют перемещению подвижной части подвески, а также препятствуют пробою подвески только при расстоянии между магнитами в пределах 0…10 мм, что эквивалентно резкому увеличению жесткости подвески в конце хода сжатия.
Наиболее близкими к заявляемым способу и устройству являются способ демпфирования колебаний подвижной системы и устройство для его осуществления (патент RU 2426922, МПК F16F 9/53, F16F 6/00, F16F 15/03, опубл. 20.08.2011); способ заключается в том, что колебания демпфируют посредством приложения к системе диссипативных сил путем увеличения вязкости магнитной жидкости и путем приложения к системе дополнительной диссипативной силы сопротивления за счет возбуждения импульсов магнитного поля в демпфирующей магнитной жидкости, причем дополнительную диссипативную силу сопротивления создают в области демпфирующей магнитной жидкости, которая пространственно предваряет передний фронт перемещения подвижной части системы, погруженной в магнитную жидкость, в направлении перемещения.
Устройство для осуществления способа демпфирования колебаний подвижной системы содержит цилиндр, заполненный магнитной жидкостью, подвижные в осевом направлении шток с поршнем, размещенные в цилиндре, соленоидную катушку из нескольких секций, охватывающую цилиндр и подключаемую к регулируемому источнику питания, причем регулируемый источник питания содержит измерители положения и направления перемещения поршня, выходы которых соединены с первым и вторым информационными входами логического блока, силовой вход которого соединен с источником питания, а выход соединен с управляющим входом коммутатора, причем выходы коммутатора соединены с входами секций соленоидной катушки.
Недостатком способа и устройства для его осуществления является ограниченный диапазон диссипативных сил сопротивления вследствие ограничения рабочего диапазона воспринимаемых нагрузок из-за неизменной жесткости пружины и, в результате, ограниченная эффективность демпфирования.
Техническим результатом изобретения является расширение диапазона значений диссипативных сил сопротивления, рабочего диапазона воспринимаемых нагрузок и повышение эффективности демпфирования.
Указанный технический результат достигается тем, что в способе демпфирования колебаний системы, по которому колебания демпфируют за счет приложения к системе диссипативных сил сопротивления путем увеличения вязкости магнитной жидкости и путем возбуждения импульсов магнитного поля в области демпфирующей магнитной жидкости, которая пространственно предваряет передний фронт перемещения части подвижной системы, погруженной в магнитную жидкость в направлении перемещения, согласно изобретению производят процесс дополнительного демпфирования колебаний системы в заполненных газом переменном объеме пневматического упругого элемента и постоянном объеме полого плунжера, размещенных между подвижными и малоподвижными частями системы и связанных с системой, путем кратковременного соединения объемов газа и уменьшения при этом разности давлений между переменным и постоянным объемами газа, периодически создаваемой при перемещении подвижной части системы.
В части устройства указанный технический результат достигается тем, что в устройстве для демпфирования колебаний системы, содержащем цилиндр, заполненный магнитной жидкостью, подвижные в осевом направлении шток с поршнем, размещенные в цилиндре, соленоидную катушку, охватывающую цилиндр, подключенную к регулируемому источнику питания, содержащему измерители положения и направления перемещения поршня, выходы которых соединены с первым и вторым информационными входами логического блока, силовой вход которого соединен с источником питания, а выход соединен с управляющим входом коммутатора, причем выходы коммутатора соединены с входами секций соленоидной катушки, согласно изобретению между подвижными и малоподвижными частями системы размещают заполненные газом емкость переменного объема в виде пневматического упругого элемента, установленного в жестко связанном с цилиндром пуансоне, и емкость постоянного объема, выполненную в виде жестко соединенного со штоком полого плунжера, между емкостями переменного и постоянного объемов в плунжере установлено с возможностью соединения их объемов клапанное устройство, источник питания снабжен датчиком ускорения поршня, соединенным с третьим информационным входом логического блока.
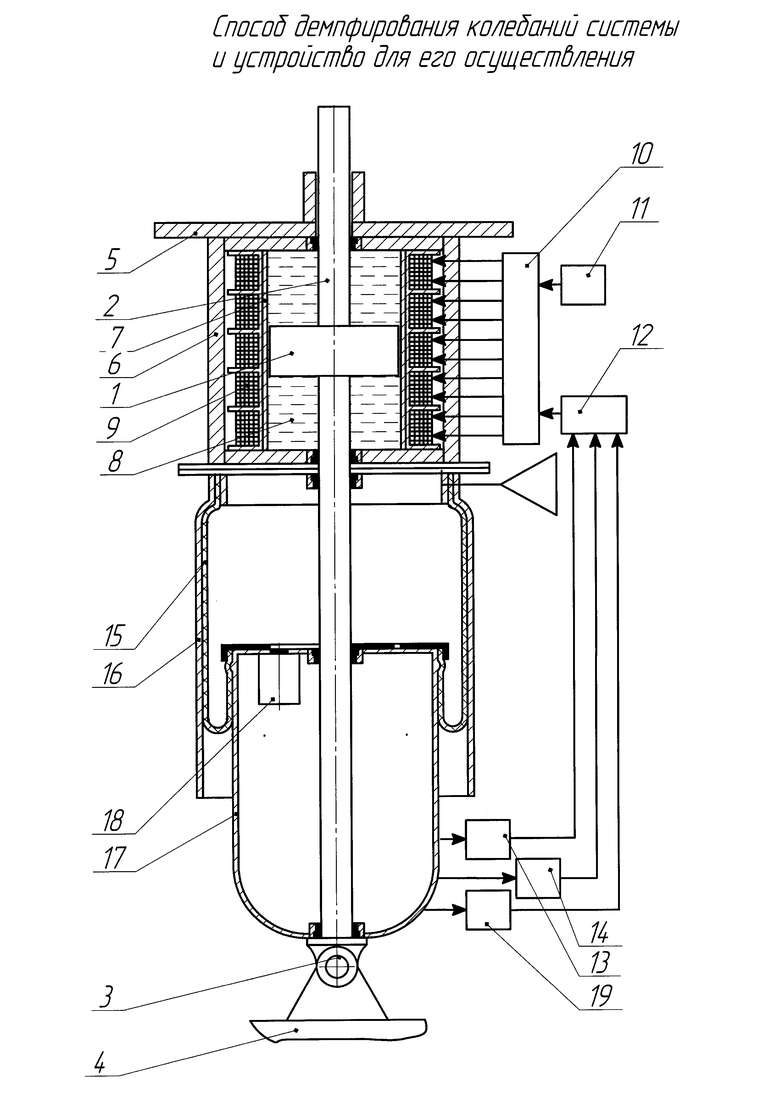
Сущность технического решения поясняется чертежом, на котором изображено заявляемое устройство в разрезе.
Способ осуществляется следующим образом.
Часть подвижной системы помещают в магнитную жидкость. При перемещении этой подвижной части системы путем увеличения вязкости магнитной жидкости и путем возбуждения импульсов в области магнитной жидкости, которая пространственно предваряет передний фронт перемещения этой части в направлении перемещения, что означает приведение в действие двух видов демпфирования колебаний системы, согласно способу-прототипу, на всей длине перемещения подвижной части системы.
Одновременно в сжатом газе, который размещают в емкости переменного объема пневматического упругого элемента и емкости постоянного объема полого плунжера, связанных с системой, при взаимно неперемещаемом (относительно неподвижном) положении частей системы емкости переменного и постоянного объемов сначала кратковременно соединяют, давление газа в объемах за счет их кратковременного соединения выравнивается, а затем емкости изолируют одну от другой, обеспечивая создание разности давлений между переменным и постоянным объемами в течение перемещения, в момент прекращения перемещения емкости переменного и постоянного объемов кратковременно соединяют, а затем изолируют одну от другой, энергия сжатого газа отдается системе, что ведет к дополнительному демпфированию колебаний системы на длине перемещения подвижной части системы.
При колебаниях с малой амплитудой в области статического положения по сигналу датчика ускорений поршня магнитное поле отключается, и колебания демпфируются пневматическим упругим элементом и другими частями системы.
В результате диапазон диссипативных сил сопротивления и диапазон воспринимаемых нагрузок расширяются, эффективность демпфирования повышается вследствие того, что переменный и постоянный объемы газа, заключенные в пневматическом упругом элементе и полом плунжере, выполняют функции демпфирующего элемента, осуществляющего дополнительное демпфирование.
Устройство (см. чертеж) содержит поршень 1, шток 2, соединенные через узел крепления 3 с основанием 4, колебания которого демпфируются и передаются в ослабленном виде массивной малоподвижной части 5. Корпус демпфера 6 является замкнутым и выполнен из магнитопроводящего материала. Поршень 1 и шток 2, являющиеся подвижной частью системы, помещены в цилиндр 7, заполненный магнитной жидкостью 8. Цилиндр 7 расположен внутри многосекционной соленоидной катушки 9, сердечником которой являются цилиндр 7 и корпус демпфера 6.
Входы каждой секции многосекционной соленоидной катушки 9 соединены с выходами коммутатора электрического напряжения 10, один из входов которого соединен с источником питания 11, а второй - с выходом логического блока (микропроцессором) 12. Один из входов логического блока соединен с выходом датчика положения 13, а второй - с выходом датчика направления перемещения 14. Датчик положения 13 и датчик направления перемещения 14 определяют соответственно положение и направление перемещения поршня 1. Малоподвижный элемент системы цилиндр 7 снабжен емкостью переменного объема в виде пневматического упругого элемента 15, размещенного в пуансоне 16, жестко связанном с цилиндром, и емкостью постоянного объема в виде полого плунжера 17, жестко соединенного с подвижным элементом системы штоком 2, между пневматическим упругим элементом 15 и плунжером 17 установлено с возможностью соединения их объемов клапанное устройство 18, а источник питания снабжен датчиком ускорения поршня, соединенным с третьим информационным входом логического блока.
Устройство работает следующим образом.
В исходном состоянии, при неподвижных узле крепления 3 и основании 4, подвижная часть системы поршень 1 и шток 2 цилиндра 7 и малоподвижная часть 5 находятся во взаимно неперемещаемом (относительно неподвижном) положении, т.е. поршень 1 занимает фиксированное положение относительно секций соленоидной катушки 9. Это взаимное расположение подвижных и малоподвижных частей системы определяется величиной давления газа, устанавливаемой в емкости 15 пневматического упругого элемента 16 и полого плунжера в зависимости от массы малоподвижных частей.
При возникновении колебаний узел крепления 3, основание 4 и одновременно с ними поршень 1 и шток 2 перемещаются. Допустим, что перемещение происходит вверх (по чертежу). При этом датчик перемещения 13 зафиксирует перемещение поршня 1 вверх, а датчик положения 14 зафиксирует величину смещения поршня 1 вверх от начального положения. Из-за инерционности малоподвижной части 5 перемещение поршня 1 вверх будет означать такое же перемещение поршня 1 относительно секций соленоидной катушки 9. Логический блок 12 через коммутатор 10 подает питание от источника питания (аккумулятора) 11 на ту секцию соленоидной катушки 9, которая пространственно предваряет перемещение поршня 1 по направлению движения. Это будет та секция, которая в каждый момент совпадает с плоскостью, которую можно мысленно провести через торцовую поверхность поршня, которая находится на переднем фронте движения. Таким образом, при движении поршня 1 вверх под напряжение будут попадать секции катушки 9, которые мысленно пересекаются плоскостью, проводимой через верхнюю (по чертежу) торцовую поверхность поршня 1. Логический блок 12 осуществляет это по сигналам датчиков 13 и 14.
При изменении направления перемещения поршня 1 на противоположное (основание 3 перемещается вниз) определяющей будет секущая плоскость, которую мысленно можно провести через нижнюю (по чертежу) торцовую поверхность поршня 1. То есть положение секции соленоидной катушки 9, которая, пространственно предваряя перемещение поршня 1, подключается к напряжению питания, определяет та торцовая поверхность поршня 1, которая находится в момент движения на переднем фронте перемещения поршня. Согласно чертежу получается, что при движении поршня 1 вверх пространственную область предварения определяет верхняя торцовая поверхность поршня 1, а при движении вниз - нижняя торцовая поверхность поршня 1.
Демпфирование происходит следующим образом.
При подаче напряжения на соленоидную катушку 9 вязкость магнитной жидкости увеличивается, создавая первый демпфирующий фактор. При движении поршня 1 в любую сторону (вниз или вверх) в области, предваряющей пространственно его перемещение, «дежурная» секция соленоидной катушки 9 формирует в пределах своей секции магнитное поле (остальные секции обесточены). Поскольку магнитная жидкость принципиально неполярная среда, она течет в область наибольшей напряженности магнитного поля. Это означает, что при движении поршня 1 куда угодно по направлению (в процессе демпфирования) магнитная жидкость в кольцевом зазоре между поршнем 1 и цилиндром 7 будет протекать в направлении перемещения поршня 1, создавая второй демпфирующий фактор. Следует учесть, что при перемещении поршня 1 при отсутствии поля и при его наличии магнитная жидкость 8 в кольцевом зазоре между поршнем 1 и цилиндром 7 всегда перемещается противоположно перемещению поршня (уравнение Навье-Стокса и профиль течения, как правило, Пуазейлев). Налицо две скорости магнитной жидкости 8 в кольцевом зазоре: Vм - механическая скорость магнитной жидкости за счет перемещения поршня 1 в цилиндре 7 независимо от магнитного поля (всегда направлена противоположно перемещению поршня 5); Vн - магнитная скорость магнитной жидкости за счет наличия градиента магнитного поля в кольцевом зазоре при подаче напряжения на секцию, предваряющую пространственное перемещение поршня 1 в цилиндре 7 (всегда однонаправлена с перемещением поршня 1). Возникают условия:
Vм>Vн - демпфирование нормальное и поршень 1 может перемещаться, поскольку магнитное поле не полностью его тормозит;
Vм=Vн - демпфирование отсутствует, поскольку и подвижная, и неподвижная части «соединены» в единое целое;
Vм<Vн - передемпфирование, когда магнитное поле усиливает колебания подвижной системы, выводя ее при определенных условиях из устойчивого положения и приводя к разрушениям.
Следовательно, второй демпфирующий фактор принципиально позволяет построить систему демпфирования, перекрывающую диапазон жесткости, который принципиально недостижим при использовании первого фактора создания дополнительной диссипативной силы сопротивления при демпфировании.
Дополнительный, третий демпфирующий фактор создается следующим образом.
В исходном неподвижном состоянии системы клапанное устройство 19 закрыто, с началом перемещения поршня 1 из исходного положения вверх (ход сжатия), плунжер 17 перемещается, сжимая пневматический упругий элемент 15 в пуансоне 16, емкость переменного объема 15 уменьшается, давление газа в ней повышается. По окончании хода сжатия, в момент остановки подвижных частей системы поршня и штока, по сигналу датчика перемещения 13 клапанное устройство 18 открывается, при этом давление газа в емкости переменного объема пневматического упругого элемента 15 и емкости постоянного объема полого плунжера 17 в течение их кратковременного соединения выравнивается, осуществляя дополнительное демпфирование колебаний системы.
В начале перемещения поршня 1 вниз клапанное устройство 18 закрывается. Пневматический упругий элемент 15 растягивается (ход отбоя), его объем увеличивается, давление понижается. По окончании хода отбоя клапанное устройство 18 открывается, давление газа в объемах пневматического упругого элемента 15 и полого плунжера 17 за счет их кратковременного соединения выравнивается, что вновь осуществляет дополнительное демпфирование колебаний системы. В начале хода сжатия клапанное устройство 18 закрывается, разъединяя объемы пневматического упругого элемента 15 и полого плунжера 17, и т.д.
При колебаниях с малой амплитудой в области статического положения системы по сигналу датчика ускорений поршня 19 магнитное поле отключается за счет обесточивания соленоидной катушки 9, и колебания демпфируются пневматическим упругим элементом 15 и другими частями системы за счет сил трения, тем самым достигается исключение из диапазона возможных частот колебаний «мертвых» участков, то есть тех, на которых устройство может быть неэффективным.
Таким образом, пневматический упругий элемент 15 в пуансоне 16 и полый плунжер 17 выполняют функции пружины и демпфера одновременно, жесткость такой пружины регулируется изменением давления газа в пневматическом упругом элементе 15, демпфирование в магнитной жидкости и газе в объемах пневматического упругого элемента и полого плунжера осуществляется при колебательном процессе на всей длине перемещения подвижных частей системы относительно малоподвижных, а при колебаниях с малой амплитудой в области статического положения системы колебания демпфируются пневматическим упругим элементом и другими частями системы за счет сил трения, в результате обеспечивается расширение диапазона диссипативных сил сопротивления, расширение рабочего диапазона воспринимаемых нагрузок и повышение эффективности демпфирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И ЭЛЕКТРОСТАТИЧЕСКИЙ ДЕМПФЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2656232C1 |
| Регулируемый магнитореологический пневматический амортизатор | 2021 |
|
RU2764210C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ | 2015 |
|
RU2604250C2 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТОРЕОЛОГИЧЕСКИЙ ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2010 |
|
RU2449188C2 |
| УПРАВЛЯЕМЫЙ МАГНИТОЖИДКОСТНЫЙ АМОРТИЗАТОР (ВАРИАНТЫ) | 2018 |
|
RU2677740C1 |
| Магнитореологический демпфер | 2021 |
|
RU2769591C1 |
| УПРАВЛЯЕМЫЙ МАГНИТОЖИДКОСТНЫЙ АМОРТИЗАТОР | 2013 |
|
RU2550793C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
Изобретение относится к области машиностроения. Колебания демпфируют путем увеличения вязкости магнитной жидкости и путем возбуждения импульсов магнитного поля в демпфирующей магнитной жидкости. Магнитная жидкость пространственно предваряет передний фронт перемещения подвижной части системы. Создают дополнительное демпфирование колебаний системы в переменном объеме пневматического упругого элемента и постоянном объеме полого плунжера. Устройство содержит цилиндр, заполненный магнитной жидкостью. Соленоидная катушка охватывает цилиндр. Измерители положения и направления перемещения поршня соединены с информационными входами логического блока. Выходы коммутатора соединены с входами секций соленоидной катушки. Пневматический упругий элемент размещен в пуансоне. Полый плунжер постоянного объема жестко соединен со штоком. Клапанное устройство установлено между пневматическим упругим элементом и полым плунжером. Источник питания снабжен датчиком ускорения поршня. Достигается расширение диапазона диссипативных сил сопротивления, расширение рабочего диапазона воспринимаемых нагрузок и повышение эффективности демпфирования. 2 н.п. ф-лы, 1 ил.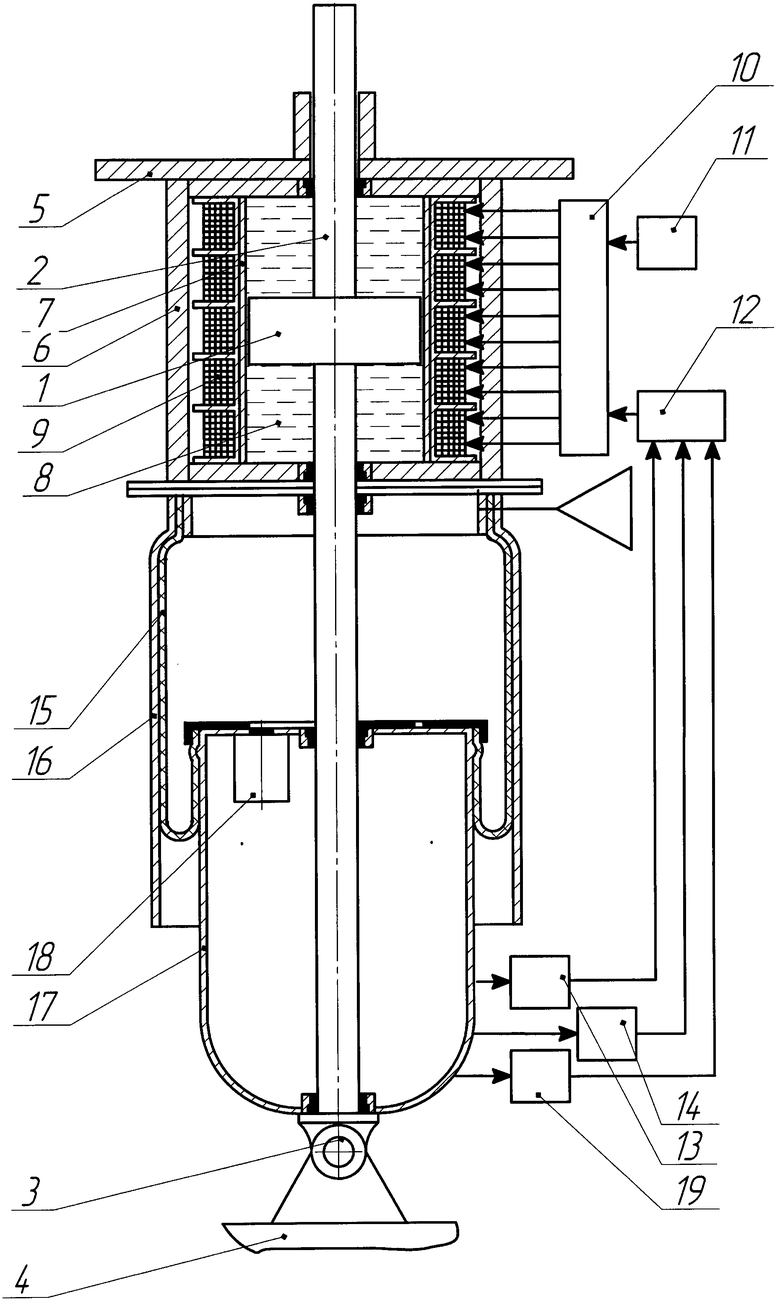
1. Способ демпфирования колебаний системы, заключающийся в том, что колебания демпфируют за счет приложения к объекту диссипативных сил сопротивления путем увеличения вязкости магнитной жидкости и путем возбуждения импульсов магнитного поля в демпфирующей магнитной жидкости, создаваемого в области демпфирующей магнитной жидкости, которая пространственно предваряет передний фронт перемещения подвижной части системы, погруженной в магнитную жидкость, в направлении перемещения, отличающийся тем, что производят процесс дополнительного демпфирования колебаний системы в заполненных газом переменном объеме пневматического упругого элемента и постоянном объеме полого плунжера, размещенных между подвижными и малоподвижными частями системы и связанных с системой, путем кратковременного соединения объемов газа и уменьшения при этом разности давлений между объемами газа, периодически создаваемой при перемещении подвижной части системы.
2. Устройство для демпфирования колебаний системы, содержащее цилиндр, заполненный магнитной жидкостью, подвижные в осевом направлении шток с поршнем, размещенные в цилиндре, соленоидную катушку, охватывающую цилиндр, подключенную к регулируемому источнику питания, содержащему измерители положения и направления перемещения поршня, выходы которых соединены с первым и вторым информационными входами логического блока, силовой вход которого соединен с источником питания, а выход соединен с управляющим входом коммутатора, причем выходы коммутатора соединены с входами секций соленоидной катушки, отличающееся тем, что устройство снабжено пневматическим упругим элементом, размещенным в пуансоне, жестко связанным с цилиндром, и полым плунжером, выполненным в виде емкости постоянного объема, жестко соединенным со штоком, между пневматическим упругим элементом и полым плунжером установлено с возможностью соединения их объемов клапанное устройство, а источник питания снабжен датчиком ускорения поршня, соединенного с третьим информационным входом логического блока.
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| ПНЕВМАТИЧЕСКИЙ УПРУГИЙ ЭЛЕМЕНТ | 2009 |
|
RU2428602C2 |
| US 5449150 A, 12.09.1995 | |||
| US 5878851 A, 09.03.1999. | |||

