Изобретение относится к транспортным средствам и может быть использовано при проектировании инвалидных колясок, например для передвижения по ступеням. Известно транспортное средство (патент SU 1581312, A61G 5/02), содержащее раму, сиденье, ведущие и ведомые колеса, а также приспособление для передвижения по лестничным маршам, выполненное в виде установленных на ведущих колесах радиальных подпружиненных телескопических штырей с фиксатором исходного положения и двух прикрепленных к раме и имеющих возможность перемещаться относительно плоскости, проходящей через точки опоры колес, ползовидных опор (лыж). Недостатком такого транспортного средства при движении по ступеням является возможность соскакивания штырей на находящуюся ниже ступень в случае попадания наконечника штыря на край ступени, что нарушает плавность хода. Конструкция ведущих колес: телескопические штыри, радиальные направляющие, пружины, фиксаторы не позволяют быстро и безопасно передвигаться по ступеням лестничного марша и по бездорожью.
Наиболее близким техническим решением является транспортное средство (патент SU 2537208, В62В 5/02, B62D 57/024, A61G 5/06), содержащее раму, колеса, опорная круговая поверхность которых выполнена волнообразной и/или зигзагообразной и/или торцевая сторона опорной круговой поверхности колеса снабжена штырями. Ось колеса связана шарнирно со втулкой, расположенной внутри ступицы колеса, с возможностью вращения и с возможностью поворота продольной плоскости колеса относительно оси колеса на определенный угол в зависимости от места контакта опорной поверхности колеса с профилем препятствия (дороги), при этом колеса упираются на опорную круговую поверхность, непосредственно в ступице каждого колеса расположен электромотор. Недостатки такого транспортного средства при движении по ступеням. Если шаг волнообразной опорной круговой поверхности колеса два раза больше шага ступеньки, то продольная плоскость колеса относительно оси колеса меняет угол в процессе движения по ступенькам, переваливаясь с боку на бок, что не позволяет быстро и безопасно передвигаться по ступеням лестничного марша. Колеса не могут упираться на торцевые стороны обода колеса при движении по лестнице и по бездорожью, невозможность движения по воде.
Техническим результатом заявляемого технического решения является повышение эксплуатационных возможностей транспортного средства, позволяющих быстро и безопасно передвигаться по ступеням лестничного марша, по бездорожью и по воде.
Технический результат достигается тем, что транспортное средство для преодоления препятствий содержит раму, колеса, опорная круговая поверхность котороых выполнена волнообразной и/или зигзагообразной и/или торцевая сторона опорной круговой поверхности колеса снабжена штырями, непосредственно в ступице каждого колеса расположен электромотор, колеса упираются на опорную круговую поверхность, причем колеса могут упираться и на торцевые стороны обода колеса при движении по лестнице, по бездорожью выполняют функцию зацепа, гребного колеса с воздушными полостями при движении по воде благодаря исполнительному приводу, позволяющему изменять угол наклона колес как на стоянке, так и при движении, где ось каждого колеса связана с рамой с возможностью поворота продольной плоскости колеса относительно плоскости рамы на определенный угол, при этом в зависимости от эксплуатационных назначений используется исполнительный привод: привод с ручным рычажным заданием угла поворота оси колеса, который состоит из рычага с ручкой, рычаг с ручкой связаны с валом, проходящим через оси вращения оси колеса, рычаг расположен между двумя фиксирующими сегментами, расположенными на раме, сегмент снабжен пазами, расположенными по контуру сегмента, в пазах расположены фиксаторы, связанные через штангу с верхней частью ручки в виде рычажка, фиксатор под действием пружины в рабочем положении находится в пазу, или привод управляемый маховиком с ручкой, снабженным шкалой для отсчета углов поворота, привод состоит из червячного редуктора, вал червяка связан с маховиком и ручкой, червячное колесо редуктора соединено на осях вращения оси колеса, редуктор неподвижно закреплен на раме транспортного средства, или привод для задания угла поворота оси колеса посредством пульта управления, привод состоит из редуктора и электромотора, вал редуктора соединен на осях вращения с осью колеса, редуктор с электромотором неподвижно закреплены на раме транспортного средства, или привод, снабженный датчиками угловых положений, блоком управления транспортного средства, электронно-вычислительной машиной, сервоприводом, где при движении транспортного средства датчик угловых положений передает сигнал блоку управления транспортного средства, далее электронно-вычислительной машине исполнительного сервопривода, каждый сервопривод устанавливает продольную плоскость колеса относительно плоскости рамы на угол, приводящий плоскость рамы в горизонтальное положение автоматически. Техническое решение представлено на чертежах:
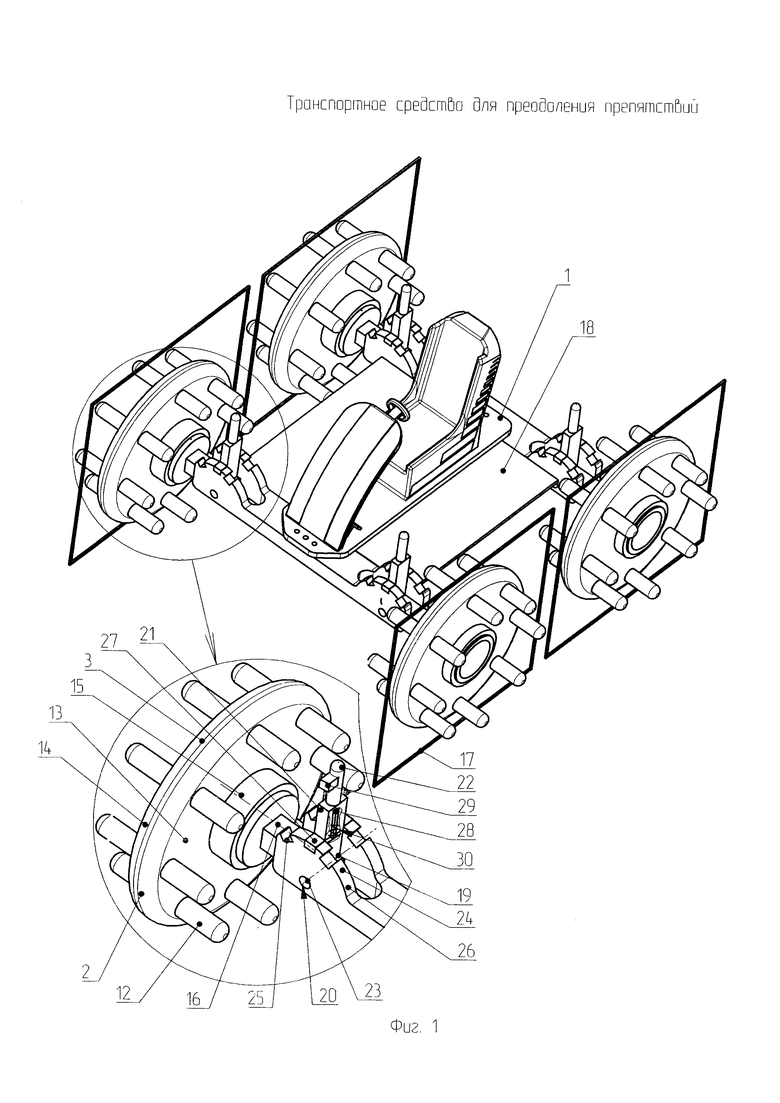
Фиг. 1 - транспортное средство для преодоления препятствий, опорная круговая поверхность снабжена штырями, расположенными с торцовой стороны обода и имеющими шаг, равный шагу ступени, ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по плоской поверхности;
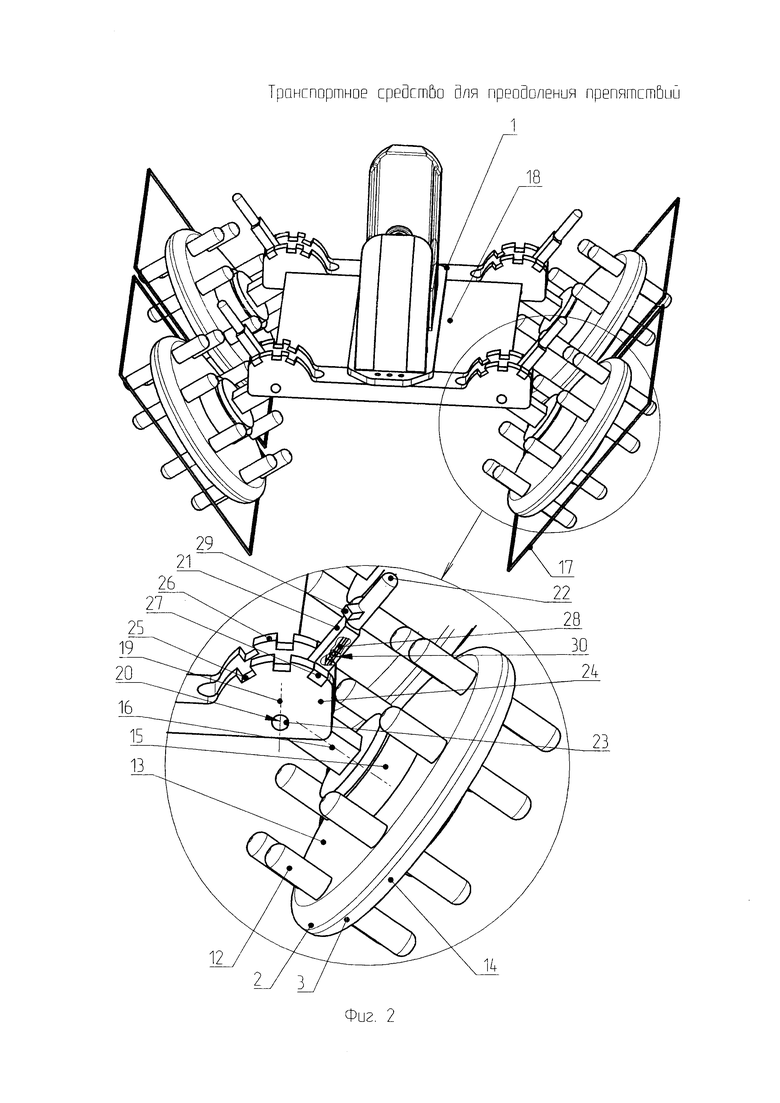
Фиг. 2 - транспортное средство для преодоления препятствий, опорная круговая поверхность снабжена штырями, расположенными с торцовой стороны обода и имеющими шаг, равный шагу ступени, ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по ступенчатой поверхности;
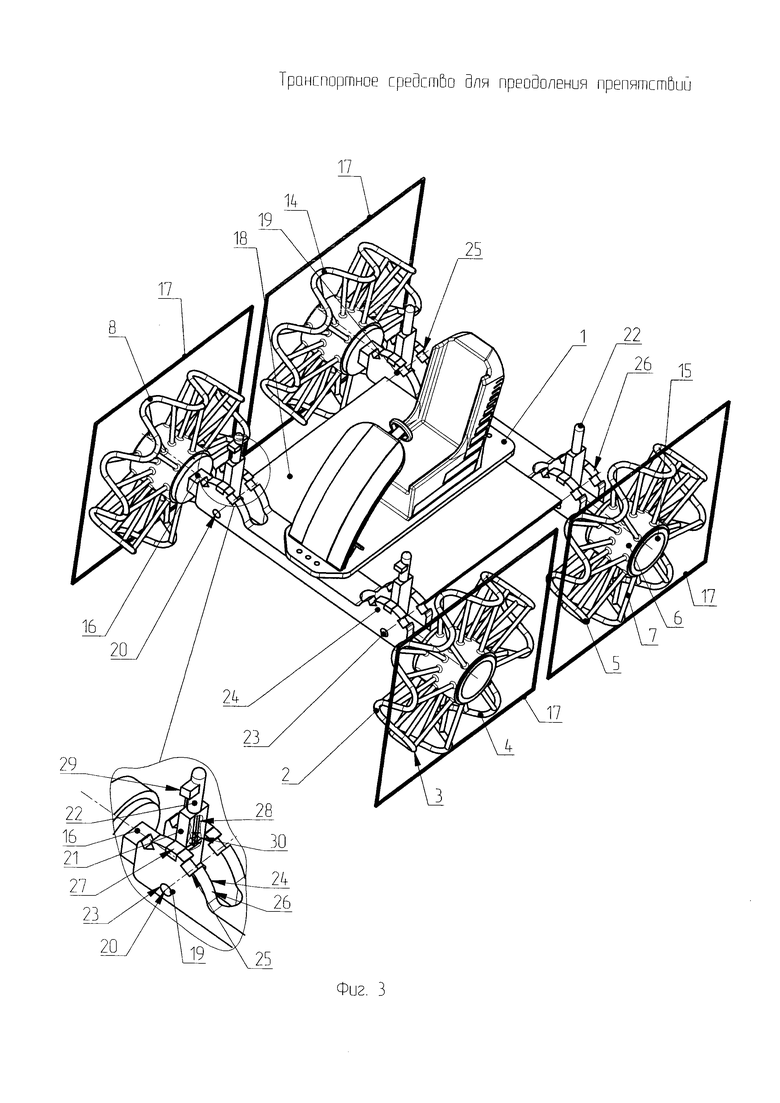
Фиг. 3 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по плоской поверхности;
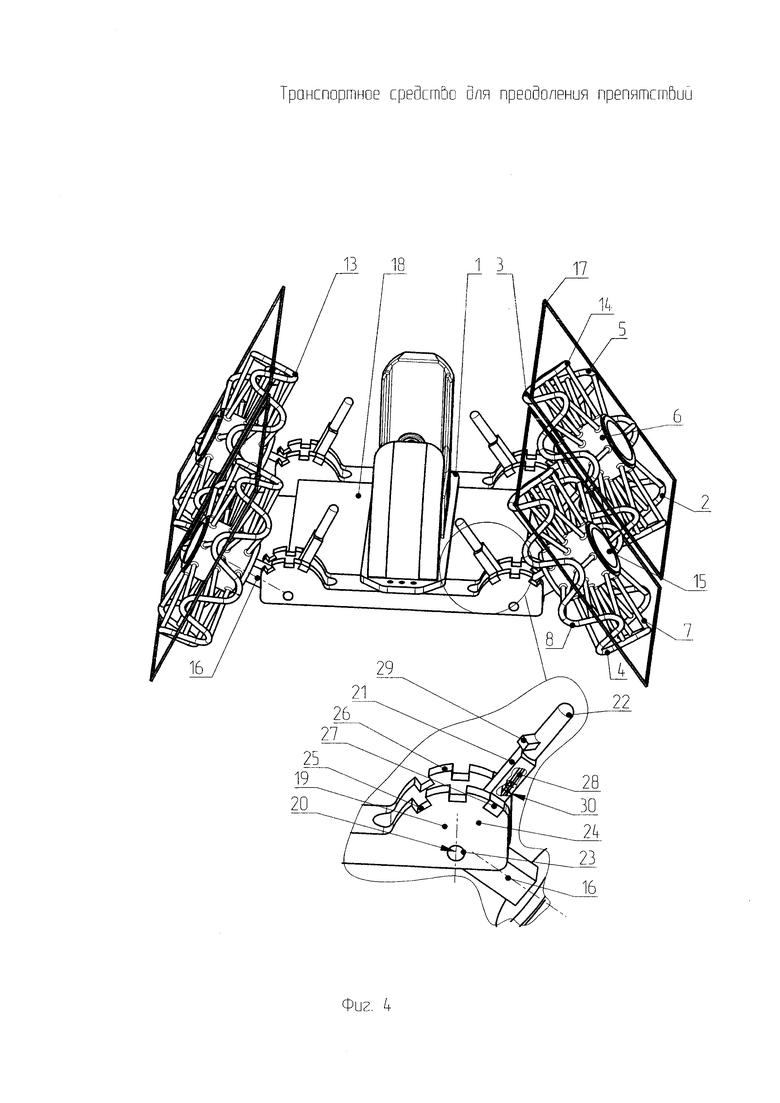
Фиг. 4 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по ступенчатой поверхности;
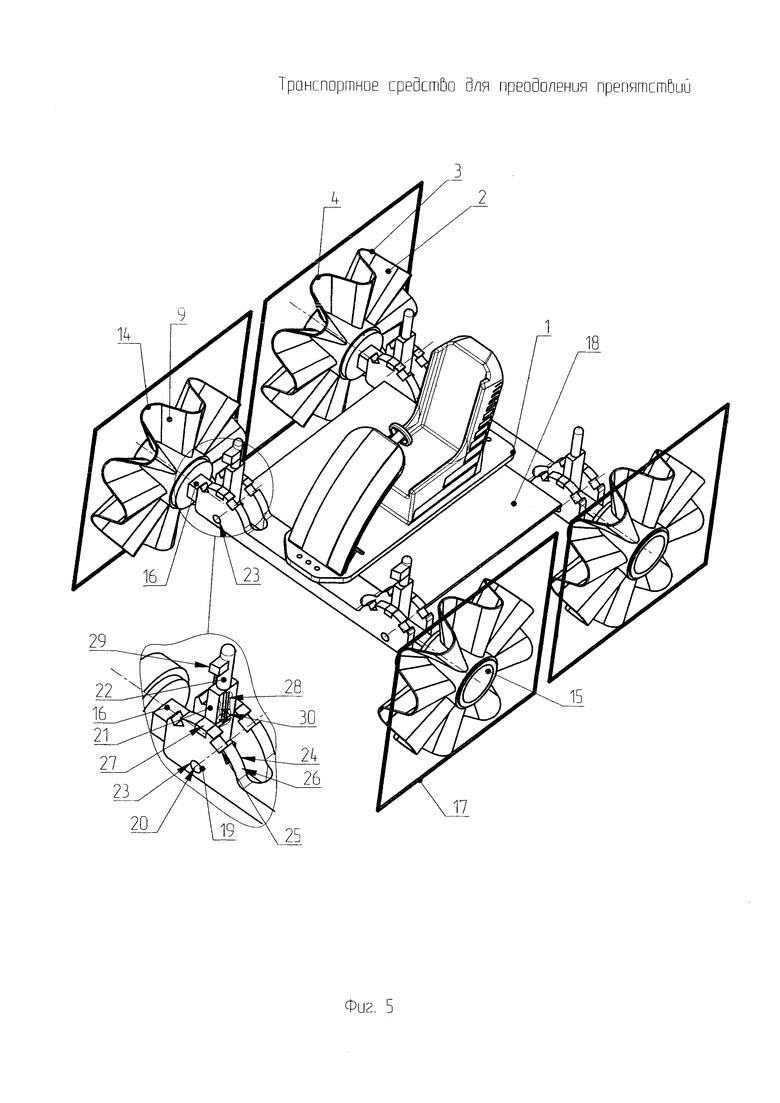
Фиг. 5 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (с волнообразным диском), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по плоской поверхности;
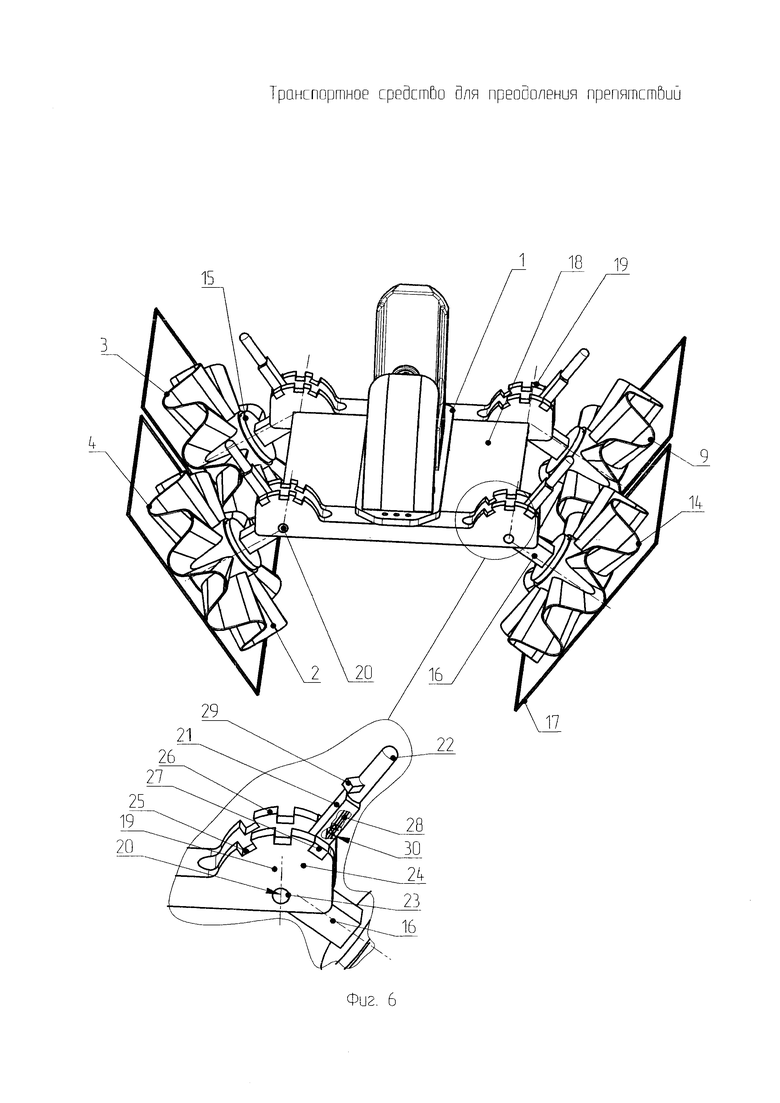
Фиг. 6 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (с волнообразным диском), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по ступенчатой поверхности;
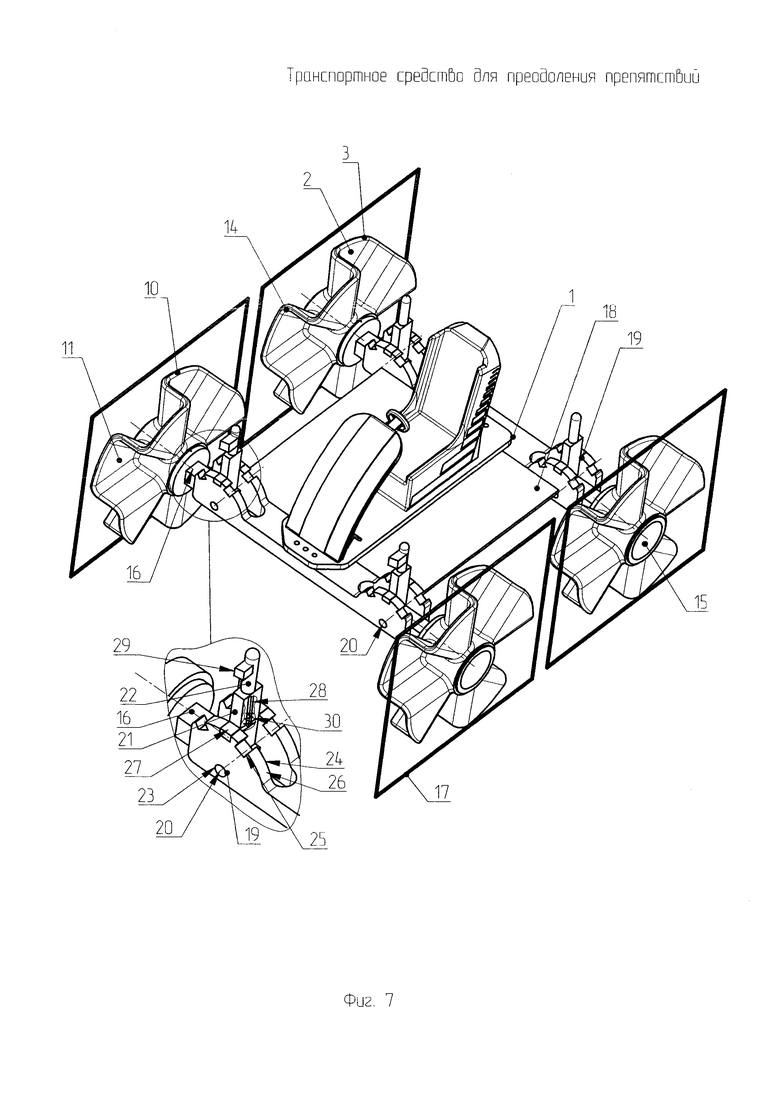
Фиг. 7 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена зигзагообразной (с зигзагообразным диском), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по плоской поверхности;
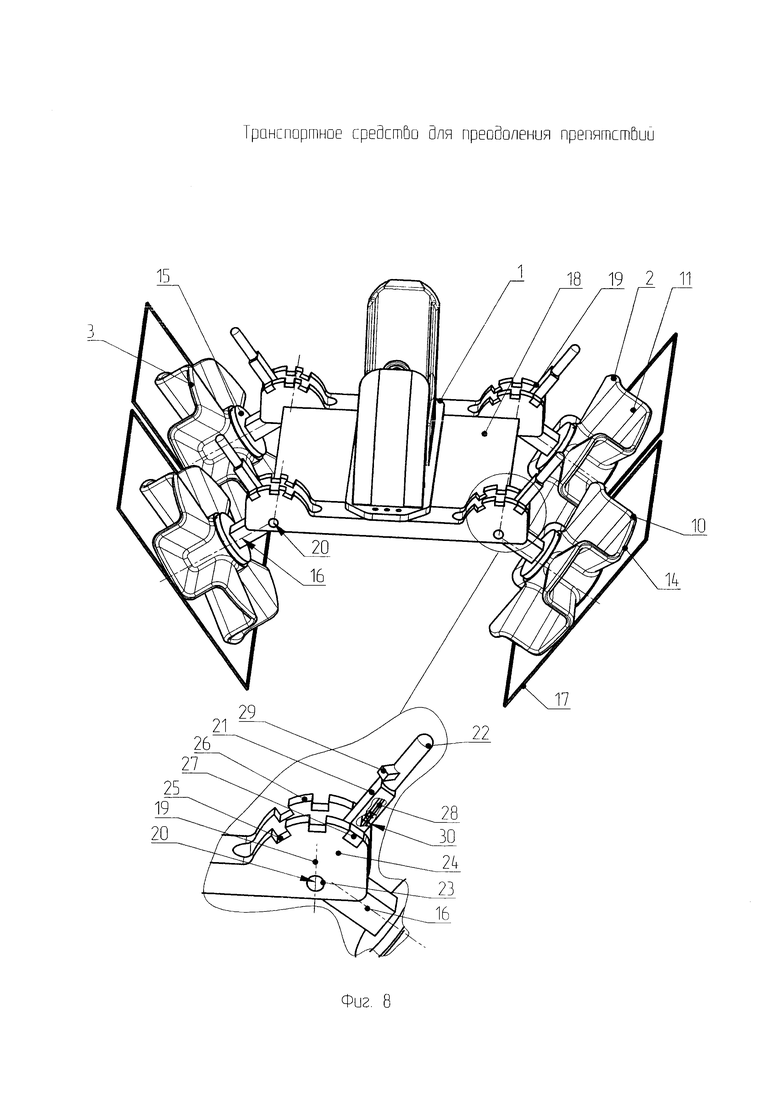
Фиг. 8 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена зигзагообразной (с зигзагообразным диском), ручное рычажное изменение продольной плоскости колеса, транспорт в режиме движения по ступенчатой поверхности;
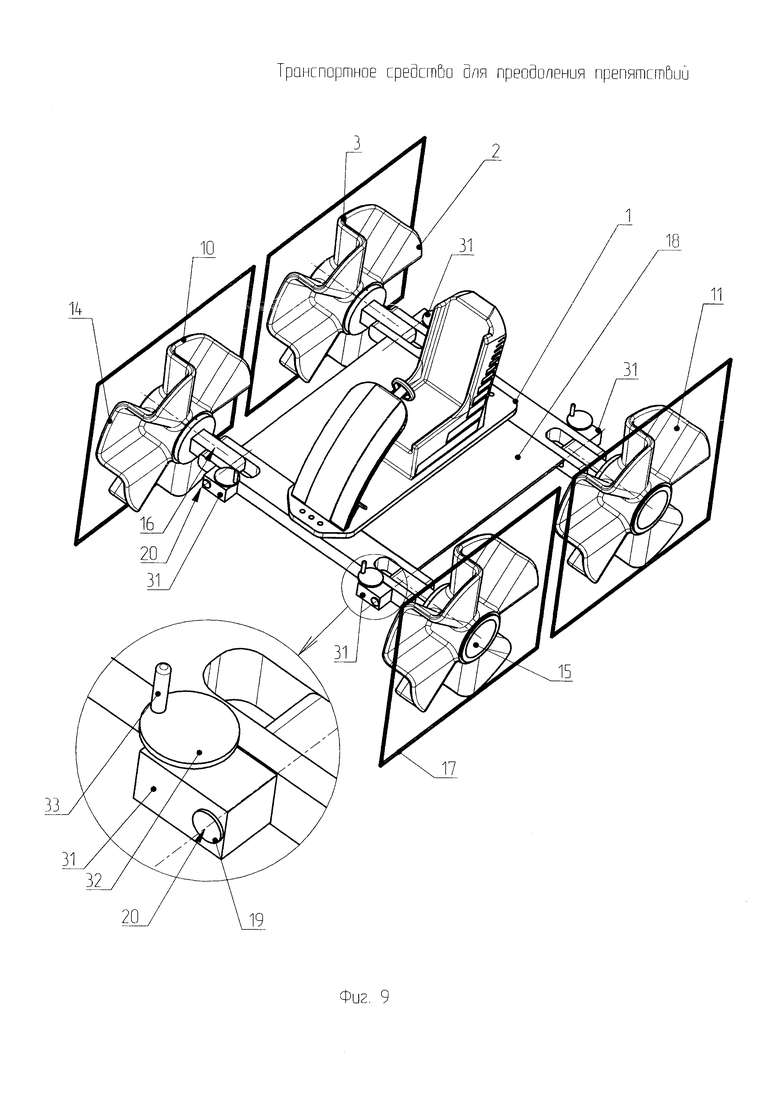
Фиг. 9 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена зигзагообразной (с зигзагообразным диском), изменение продольной плоскости колеса ручное, через редуктор, транспорт в режиме движения по плоской поверхности;
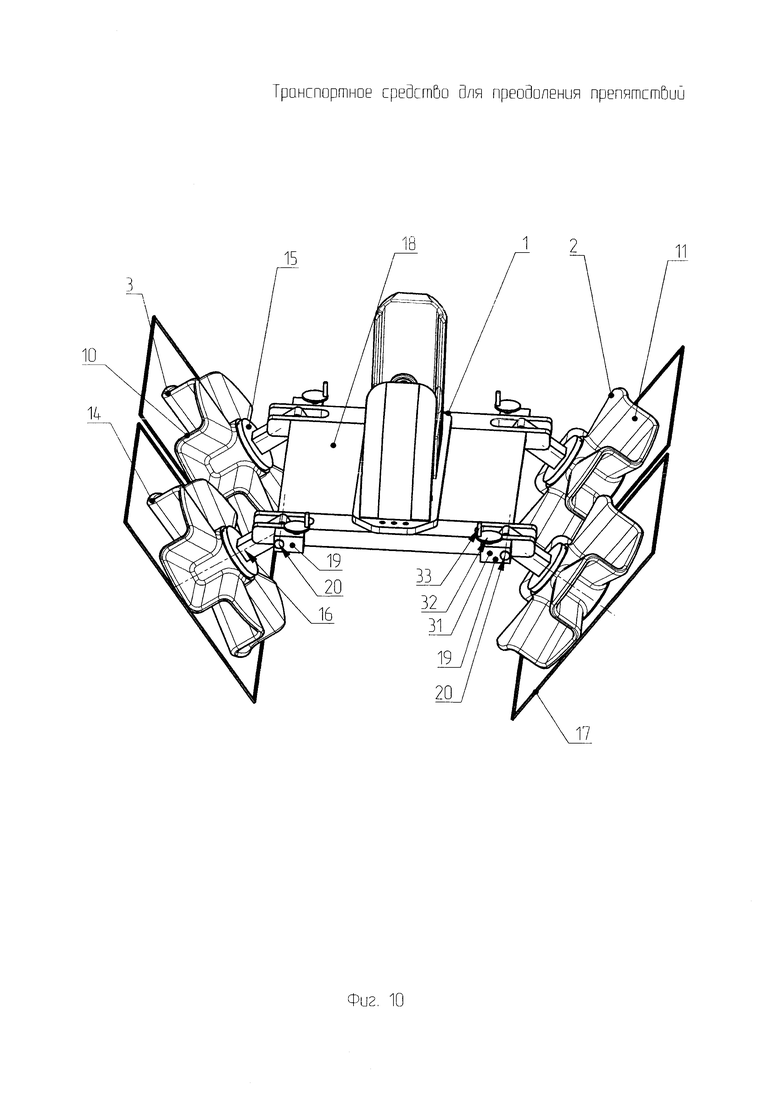
Фиг. 10 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена зигзагообразной (с зигзагообразным диском), изменение продольной плоскости колеса ручное, через редуктор, транспорт в режиме движения по ступенчатой поверхности;
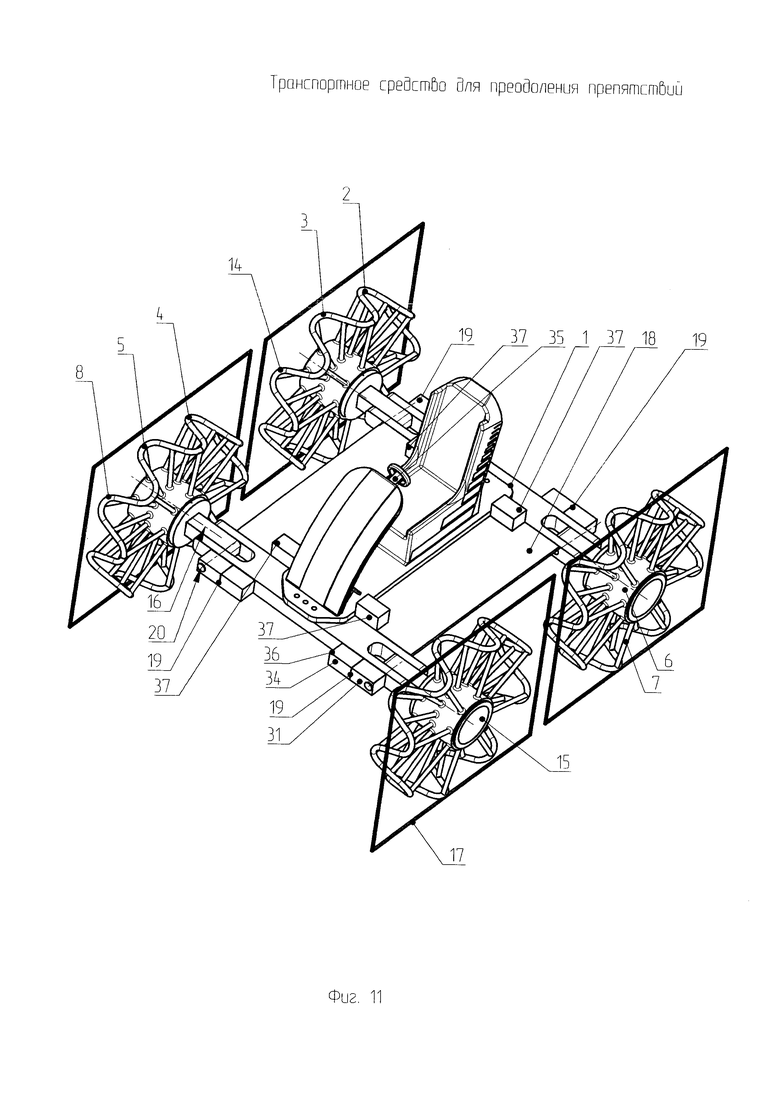
Фиг. 11 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по плоской поверхности;
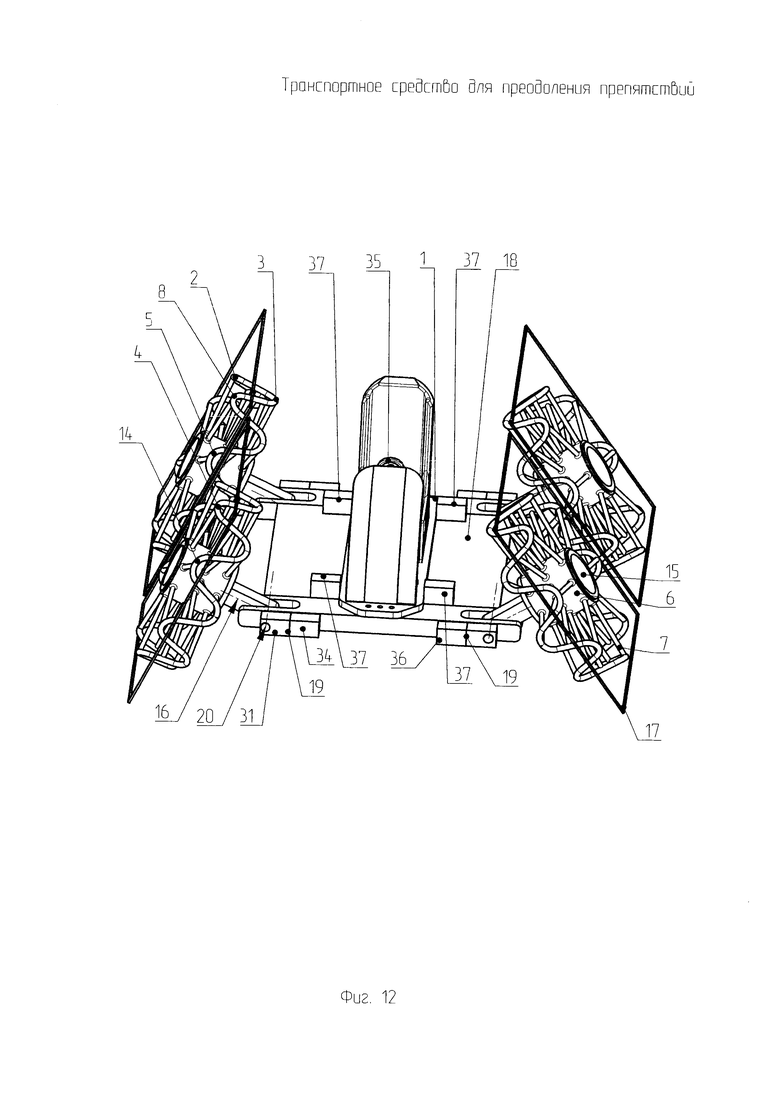
Фиг. 12 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по ступенчатой поверхности;
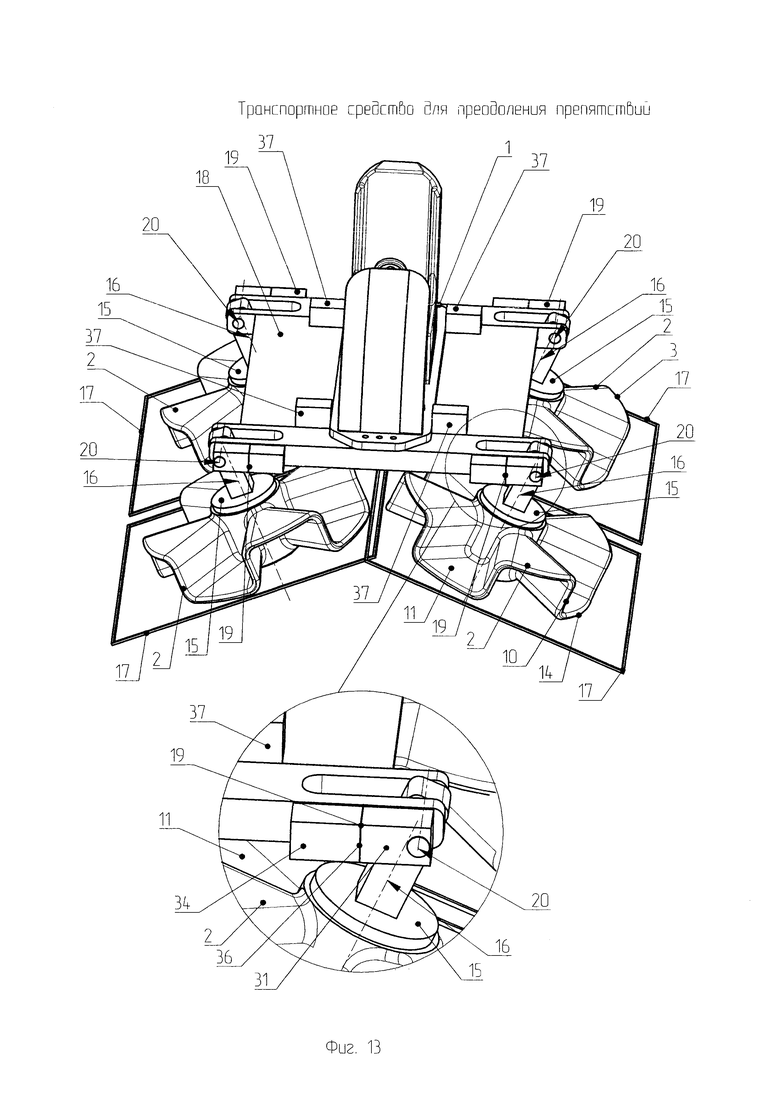
Фиг. 13 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена зигзагообразной (с зигзагообразным диском), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по ступенчатой поверхности, по воде, вид спереди;
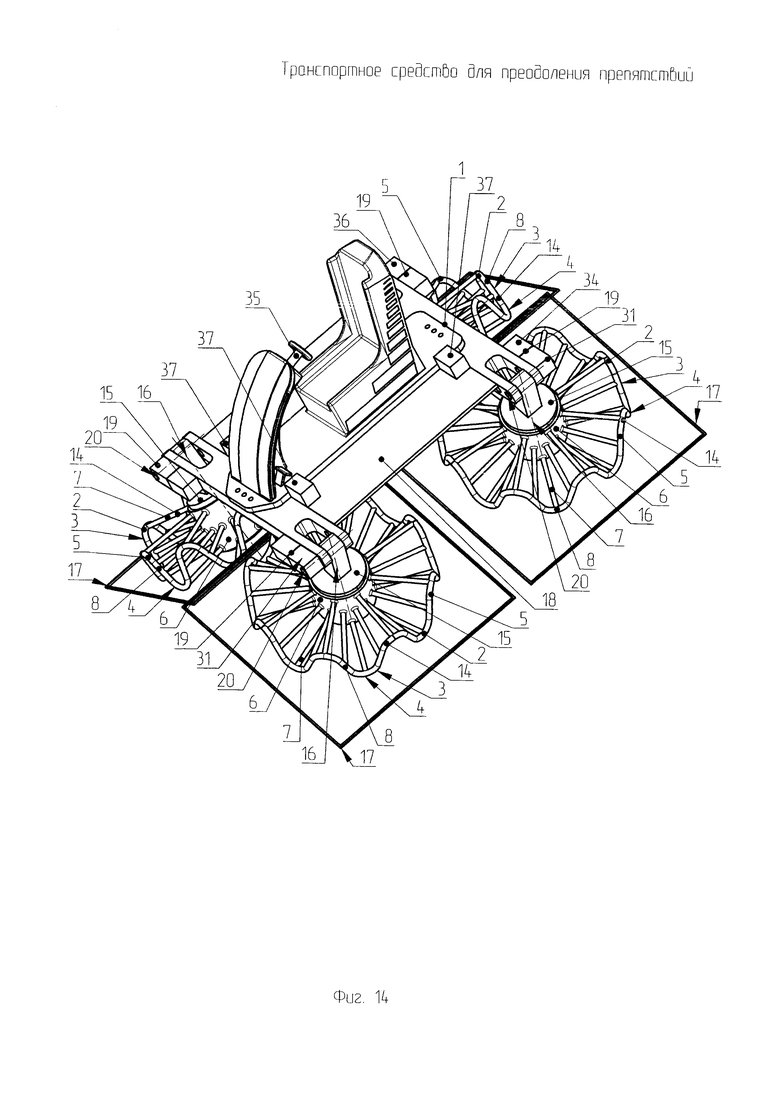
Фиг. 14 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по ступенчатой поверхности, вид сбоку;
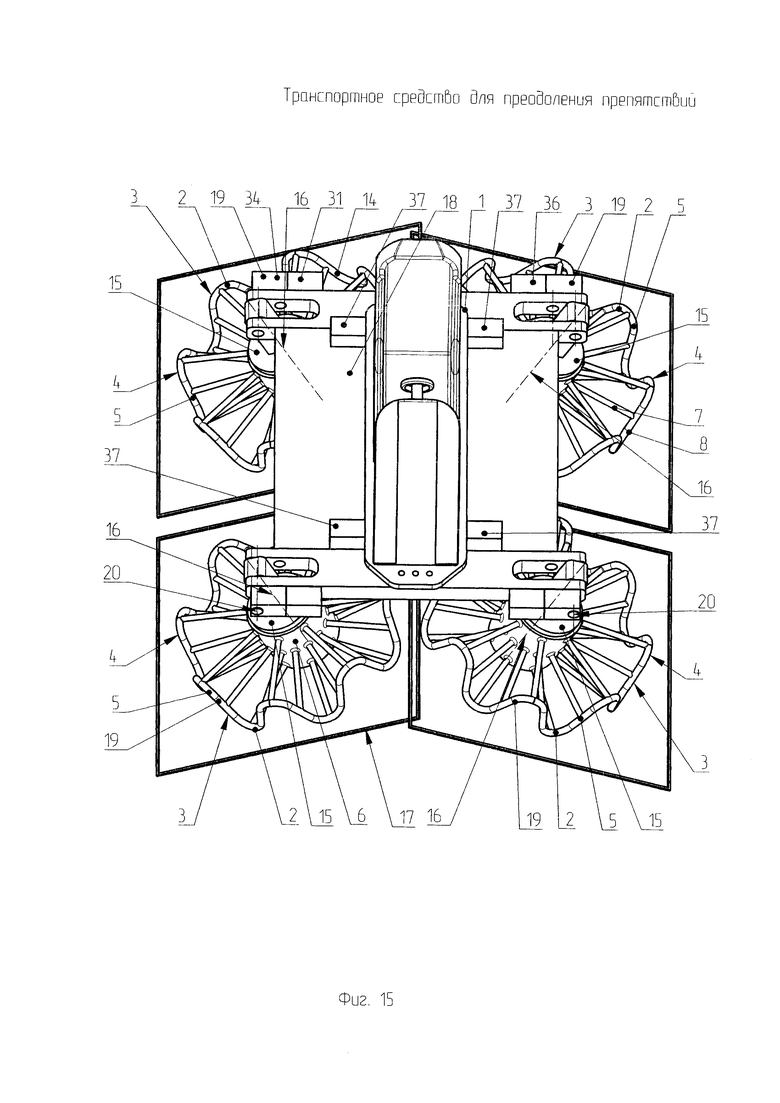
Фиг. 15 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по ступенчатой поверхности, вид сверху;
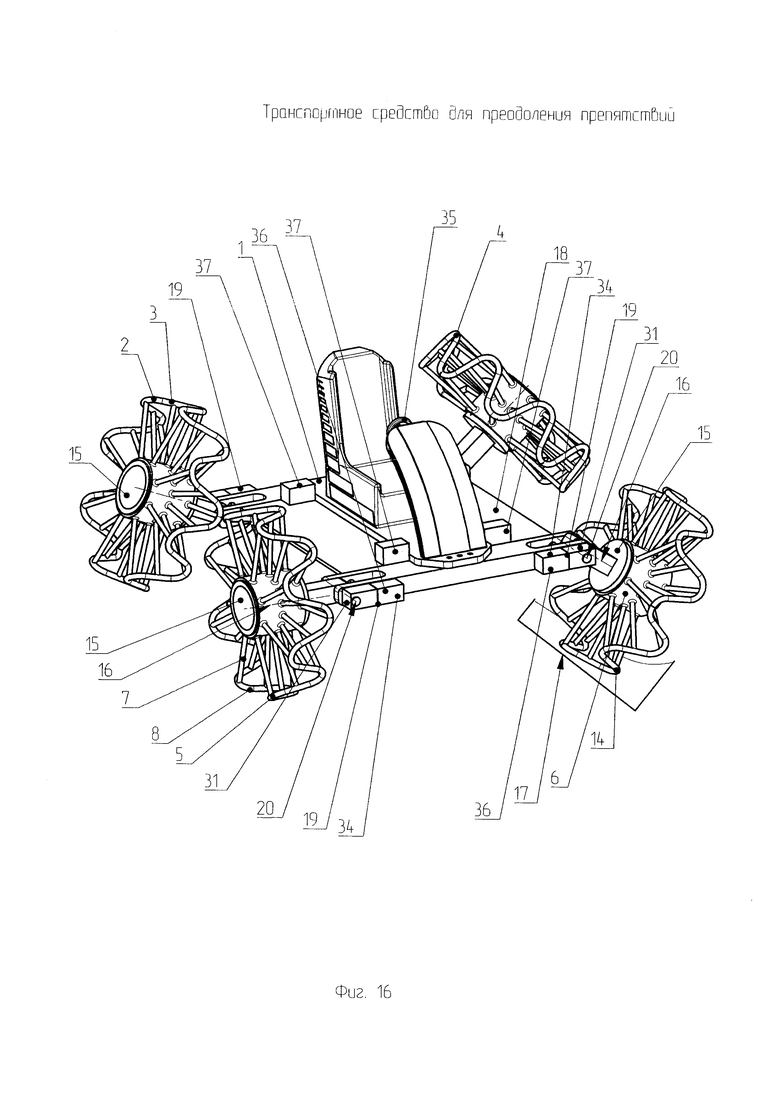
Фиг. 16 - транспортное средство для преодоления препятствий, опорная круговая поверхность колеса выполнена волнообразной (со спицей), изменение продольной плоскости колеса электромотором через редуктор или сервопривод, транспорт в режиме движения по рельефной местности, где:
1 - рама;
2 - колесо;
3 - опорная круговая поверхность;
4 - волнообразная опорная круговая поверхность;
5 - труба;
6 - ступица;
7 - спица;
8 - обод;
9 - волнообразный диск;
10 - зигзагообразная опорная круговая поверхность;
11 - зигзагообразный диск;
12 - штырь;
13 - торцевая сторона обода;
14 - резиновые протекторы;
15 - электромотор колеса;
16 - ось колеса;
17 - продольная плоскость колеса;
18 - плоскость рамы;
19 - исполнительный привод;
20 - ось вращения;
21 - рычаг;
22 - ручка;
23 - вал;
24 - сегмент;
25 - паз;
26 - контур сегмента;
27 - фиксатор;
28 - штанга;
29 - рычажок;
30 - пружина;
31 - редуктор;
32 - маховик;
33 - ручка маховика;
34 – электромотор;
35 - пульт управления;
36 - сервопривод;
37 - датчик угловых положений.
Транспортное средство для преодоления препятствий (Фиг. 1…16) содержит раму 1, колеса 2 (Фиг. 3, 4), опорная круговая поверхность 3 которого выполнена волнообразной 4, например синусоидальной, и изготовлена из трубы 5 из алюминиевого сплава, например марки Д16, и связана со ступицей 6 спицами 7, опорная поверхность выполнена в виде обода 8.
Опорная круговая поверхность 3 (Фиг. 5, 6) колеса 2 может быть выполнена волнообразной 4, например синусоидальной, и изготовлена из алюминиевого сплава цельной с волнообразными дисками 9 со ступицей 6, например марки Д16.
Опорная круговая поверхность 3 (Фиг. 7, 8) колеса 2 может быть выполнена зигзагообразной 10, например «П»-образными зигзагами, и изготовлена из алюминиевого сплава цельной с зигзагообразными дисками 11 со ступицей 6, например марки Д16.
Опорная круговая поверхность 3 (Фиг. 1, 2) колеса 2 может быть снабжена штырями 12, расположенными с торцовой стороны 13 обода 8 и имеющими шаг, равный шагу ступени.
Опорная круговая поверхность 3 снабжена резиновыми протекторами 14 (Фиг. 1…16).
Каждое колесо 2 снабжено электромотором 15, расположенным непосредственно в ступице 6.
Ось 16 колеса 2 связана с рамой 1 с возможностью поворота продольной плоскости 17 колеса 2 относительно плоскости 18 рамы 1 на определенный угол посредством исполнительного привода 19, установленного на осях вращения 20 оси 16 колеса 2 с рамой 1. Вывод: колеса 2 могут упираться и на торцевые стороны 13 обода 8 колеса 2 при движении по лестнице, по бездорожью выполняют функцию зацепа, гребного колеса с воздушными полостями при движении по воде благодаря исполнительному приводу 19, позволяющему изменять угол наклона колес 2 как на стоянке, так и при движении.
Устройство исполнительного привода при ручном рычажном задании угла поворота оси колеса.
Исполнительный привод 19 (Фиг. 1…8) состоит из рычага 21 с ручкой 22. Рычаг 21 с ручкой 22 связаны с валом 23, проходящими через оси вращения 20 оси 16 колеса 2. Вал 23 связан с осью 16 колеса 2. Рычаг 21 расположен между двумя фиксирующими сегментами 24, расположенными на раме 1. Сегмент 24 снабжен пазами 25, расположенными по контуру 26 сегмента 24. В пазах 25 расположены фиксаторы 27, связанные через штангу 28 с верхней частью ручки 22 в виде рычажка 29. Фиксатор 27 под действием пружины 30 в рабочем положении находится в пазу 25 и фиксирует ось 16 колеса 2.
Устройство исполнительного привода при ручном, через редуктор 31 (Фиг. 1…10), задании угла поворота оси 16 колеса 2 путем поворота маховика 32 с ручкой маховика 33.
Исполнительный привод 19 состоит из редуктора 31, например червячный редуктор 31. Червячная передача обладает эффектом самоторможения и является необратимой: если приложить момент к червячному колесу (не показан), из-за сил трения передача работать не будет, такая передача увеличивает крутящий момент и соответственно уменьшает угловую скорость. Вал червяка (не показан) связан с маховиком 32, снабженным ручкой 33, возможно наличие шкалы (не показана) для отсчета углов поворота. Червячное колесо (не показано) редуктора 31 соединено на осях 20 вращения с осью 16 колеса 2. Редуктор 31 неподвижно закреплен за раму 1 транспортного средства.
Устройство исполнительного привода 19 (Фиг. 11…16) при задании угла поворота оси 16 колеса 2 электромотором 34 через редуктор 31 посредством пульта управления 35.
Исполнительный привод 19 состоит из редуктора 31 и электромотора 34. Вал редуктора 31 соединен на осях вращения 20 с осью 16 колеса 2. Редуктор с электромотором неподвижно закреплены за раму 1 транспортного средства.
Устройство исполнительного привода 19 при задании угла поворота оси 16 колеса 2 электрическим сервоприводом 36 посредством управляющей электронно-вычислительной машины (не показана).
В качестве исполнительного привода 19 использован сервопривод 36 СП-01М ООО Научно-производственное предприятие «Автономные аэрокосмические системы-ГеоСервис».
В одном корпусе расположены редуктор (не показан), электромотор (не показан) и управляющая электронно-вычислительная машина (не показана). Особенность СП-01М в том, что установка в положение, например ось 16 колеса 2 относительно плоскости 18 рамы 1 на плоской горизонтальной плоскости может составить 90° по умолчанию при отсутствии команд управления, программируется положение по умолчанию и время ожидания до выставки в него. Если установить на раму датчики угловых положений 37 (акселерометры, датчики угловых положений), и при взаимодействии датчиков угловых положений 37 с электронно-вычислительной машиной и сервоприводом 36 СП-01М позволяет раме 1 при любых неровностях дороги находиться в горизонтальном положении.
Работа устройства.
Работа устройства исполнительного привода 19 (Фиг. 1…8) при ручном рычажном задании угла поворота оси 16 колеса 2.
Пользователь посредством воздействия на рычаг 21 с ручкой 22 может поворачивать продольную плоскость 17 колеса 2 относительно плоскости 18 рамы 1 на определенный угол по оси вращения 20. Для этого пользователь рычажок 29 на ручке 22 приподнимает и фиксатор 27 выводит из паза 25 и путем движения рычага 21 устанавливает ось 16 колеса 2 на определенный угол, отпускает рычажок 29, фиксатор 27 заходит в паз 25 сегмента 24 и ось 16 колеса 2 фиксируется в определенном положении. Таким образом пользователь для каждого колеса 2 проделывает вышеназванные действия.
Работа устройства исполнительного привода 19 (Фиг. 9, 10) при ручном, через редуктор 31, задании угла поворота оси 16 колеса.
Пользователь путем поворота маховика 32 ручкой 33 изменяет положение продольной плоскости 17 колеса 2 относительно плоскости 18 рамы 1 на определенный угол по оси вращения 20, при этом смотрит на шкалу отсчета (не показана) углов поворота. Таким образом пользователь для каждого колеса 2 проделывает вышеназванные действия.
Работа устройства исполнительного привода 19 (Фиг. 11…16) при задании угла поворота оси колеса электромотором через редуктор 31 посредством пульта управления 35.
Пользователь, нажимая на соответствующие кнопки (не показаны) пульта управления 35, поворачивает продольную плоскость 17 колеса 2 каждого по отдельности или сразу всех колес 2 относительно плоскости 18 рамы 1 на определенный угол.
Работа устройства исполнительного привода 19 при задании угла поворота оси 16 колеса электрическим сервоприводом 36 посредством управляющей электронно-вычислительной машины (не показана).
При движении датчик угловых положений 37 передает сигнал блоку управления транспортного средства (не показан), далее электронно-вычислительной машине исполнительного сервопривода СП-01М (не показан), каждый сервопривод 36 устанавливает продольную плоскость 17 колеса 2 относительно плоскости 18 рамы 1 на угол, приводящий плоскость 18 рамы 1 в горизонтальном положении автоматически.
Движение транспортного средства по плоской горизонтальной поверхности.
При этом пользователь вручную, или через пульт управления 35, или автоматически при наличии датчика угловых положений 37 и сервопривода 36 продольную плоскость 17 (Фиг. 1…16) колеса 2 относительно плоскости 18 рамы 1 устанавливает на 90°.
Движение транспортного средства по ступенькам.
При этом пользователь вручную, или через пульт управления 35 (Фиг. 11…16), или автоматически при наличии датчика угловых положений 37 и сервопривода 36 продольную плоскость 17 (Фиг. 1…16) колеса 2 относительно плоскости 18 рамы 1 устанавливает например на 70°.
В зависимости от шага волнообразной 4 и/или зигзагообразной 10 опорной круговой поверхности 3 колеса 2 и при наличии меняющего шага ступени угол наклона колес 2 можно изменять при движении.
Движение транспортного средства по бездорожью.
Пользователь вручную, или через пульт управления 35 (Фиг. 11…16), или автоматически при наличии датчика угловых положений 37 и сервопривода 36 продольную плоскость 17 колеса 2 относительно плоскости 18 рамы 1 меняет угол наклона колеса 2 (Фиг. 1…16) в зависимости от состояния дороги. Опорная круговая поверхность 3 колеса 2, выполненная волнообразной 4 и/или зигзагообразной 10, выполняет функцию грунтозацепа.
Движение транспортного средства по воде.
Пользователь вручную или через пульт управления 35 (Фиг. 13) продольную плоскость 17 колеса 2 относительно плоскости 18 рамы меняет угол наклона колеса 2. Опорная круговая поверхность 3 колеса 2, зигзагообразной 10 выполняет функцию гребного колеса 2. При больших скоростях вращения колес 2 транспортное средство приподнимется и движется, касаясь воды, за зигзагообразные 10 поверхности колес 2, причем колеса 2 выполнены плавучими, например с воздушными полостями.
В отличие от прототипа, где колеса наклоняются на определенный угол в зависимости от места контакта опорной поверхности колеса с профилем препятствия (дороги), в предложенном техническом решении колеса могут упираться и на торцевые стороны обода колеса при движении по лестнице, по бездорожью выполняют функцию зацепа, гребного колеса с воздушными полостями при движении по воде благодаря исполнительному приводу, позволяющему изменять угол наклона колес как на стоянке, так и при движении, где ось каждого колеса связана с рамой с возможностью поворота продольной плоскости колеса относительно плоскости рамы на определенный угол, что повышает эксплуатационные возможности транспортного средства.
Заявленное техническое решение имеет отличия от наиболее близких аналогов, соответственно заявленное решение удовлетворяет условию патентоспособности изобретения «новизна».
Техническое решение явным образом не следует из уровня техники. Кроме того, в процессе патентного поиска не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками заявленного технического решения. Заявленное изобретение технически осуществимо, промышленно реализуемо на машиностроительных предприятиях.
В связи с этим изобретение соответствует уровню патентоспособности и промышленно применимо.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2537208C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2012 |
|
RU2506068C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПОМЕЩЕНИИ | 2014 |
|
RU2553026C1 |
| КОЛЯСКА ДЛЯ ЛИЦ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2024 |
|
RU2840843C1 |
| ГРУЗОПАССАЖИРСКАЯ ВЕЛОМАШИНА | 2021 |
|
RU2758626C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА (ВАРИАНТЫ) | 2014 |
|
RU2600557C2 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| БЕЗОПАСНЫЙ АВТОМОБИЛЬ | 2013 |
|
RU2527622C1 |
| Транспортное средство высокой проходимости | 2021 |
|
RU2814872C2 |
Изобретение относится к транспортным средствам и может быть использовано при проектировании инвалидных колясок, например для передвижения по ступеням. Транспортное средство для преодоления препятствий содержит раму, колеса, опорная круговая поверхность колеса выполнена волнообразной и/или зигзагообразной и/или торцевая сторона опорной круговой поверхности колеса снабжена штырями, непосредственно в ступице каждого колеса расположен электромотор, колеса упираются на опорную круговую поверхность. Согласно изобретению колеса могут упираться и на торцевые стороны обода колеса при движении по лестнице, по бездорожью выполняют функцию зацепа, гребного колеса с воздушными полостями при движении по воде благодаря исполнительному приводу, позволяющему изменять угол наклона колес как на стоянке, так и при движении, где ось каждого колеса связана с рамой с возможностью поворота продольной плоскости колеса относительно плоскости рамы на определенный угол, при этом в зависимости от эксплуатационных назначений используется исполнительный привод: привод с ручным рычажным заданием угла поворота оси колеса, привод, управляемый маховиком с ручкой, снабженным шкалой для отсчета углов поворота, или привод для задания угла поворота оси колеса посредством пульта управления, или привод, снабженный датчиками угловых положений, блоком управления транспортного средства, электронно-вычислительной машиной, сервоприводом. Техническим результатом заявляемого технического решения является повышение эксплуатационных возможностей транспортного средства, позволяющих быстро и безопасно передвигаться по ступеням лестничного марша и по бездорожью. 16 ил.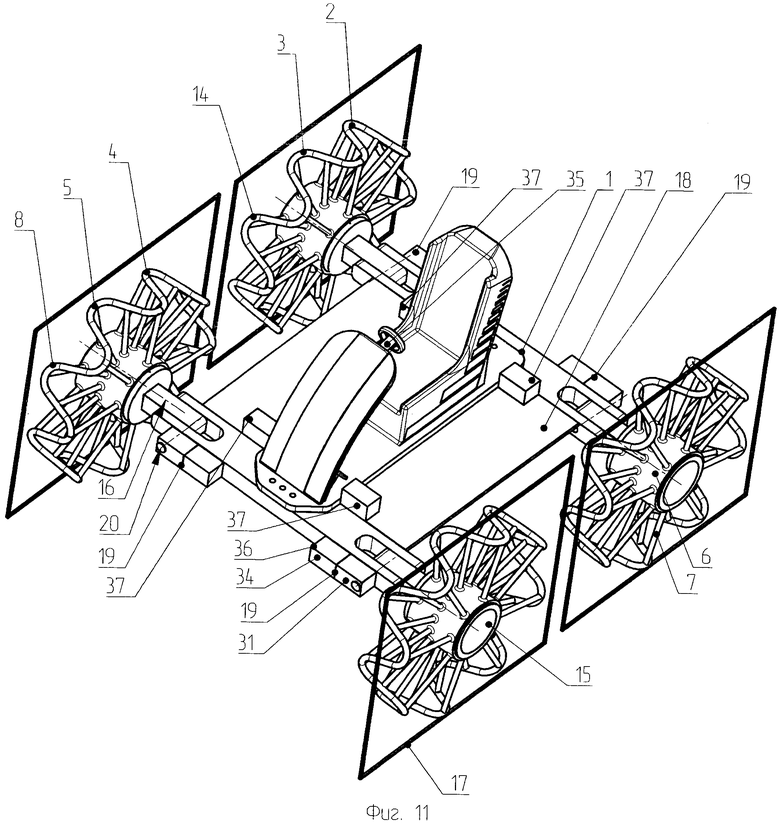
Транспортное средство для преодоления препятствий, содержащее раму, колеса, опорная круговая поверхность колеса выполнена волнообразной и/или зигзагообразной и/или торцевая сторона опорной круговой поверхности колеса снабжена штырями, непосредственно в ступице каждого колеса расположен электромотор, колеса упираются на опорную круговую поверхность, отличающееся тем, что колеса могут упираться и на торцевые стороны обода колеса при движении по лестнице, по бездорожью выполняют функцию зацепа, гребного колеса с воздушными полостями при движении по воде благодаря исполнительному приводу, позволяющему изменять угол наклона колес как на стоянке, так и при движении, где ось каждого колеса связана с рамой с возможностью поворота продольной плоскости колеса относительно плоскости рамы на определенный угол, при этом в зависимости от эксплуатационных назначений используется исполнительный привод: привод с ручным рычажным заданием угла поворота оси колеса, который состоит из рычага с ручкой, рычаг с ручкой связаны с валом, проходящим через оси вращения оси колеса, рычаг расположен между двумя фиксирующими сегментами, расположенными на раме, сегмент снабжен пазами, расположенными по контуру сегмента, в пазах расположены фиксаторы, связанные через штангу с верхней частью ручки в виде рычажка, фиксатор под действием пружины в рабочем положении находится в пазу, или привод, управляемый маховиком с ручкой, снабженным шкалой для отсчета углов поворота, привод состоит из червячного редуктора, вал червяка связан с маховиком и ручкой, червячное колесо редуктора соединено на осях вращения оси колеса, редуктор неподвижно закреплен на раме транспортного средства, или привод для задания угла поворота оси колеса посредством пульта управления, привод состоит из редуктора и электромотора, вал редуктора соединен на осях вращения с осью колеса, редуктор с электромотором неподвижно закреплены на раме транспортного средства, или привод, снабженный датчиками угловых положений, блоком управления транспортного средства, электронно-вычислительной машиной, сервоприводом, где при движении транспортного средства датчик угловых положений передает сигнал блоку управления транспортного средства, далее электронно-вычислительной машине исполнительного сервопривода, каждый сервопривод устанавливает продольную плоскость колеса относительно плоскости рамы на угол, приводящий плоскость рамы в горизонтальное положение автоматически.
| ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2537208C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КОЛЕСА НА РАМЕ ИНВАЛИДНОЙ КОЛЯСКИ | 1995 |
|
RU2095042C1 |
| Препарат для сохранения декоративного вида срезанных цветов гладиолусов и ксифиумов | 1989 |
|
SU1666014A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2260535C2 |

