Изобретение относится к специальным самоходным транспортным средствам высокой проходимости и может быть использовано как транспорт в боевых воздушных, сухопутных или подводных роботах; как транспорт в военных целях, как транспорт для спецназа, а также как патрульное судно для пограничной службы и береговой охраны; как транспорт для МЧС; для охраны лесов и заповедников; для тушения пожаров, как с воздуха, так и с земли; как транспорт для скорой помощи; как транспорт для нефтяников - при оснащении тепловизорами, системами радио и телеметрии, может быть использован как лаборатория на обнаружении выхода нефти, газа, обслуживании поисковых и геологоразведочных работ, обеспечения работ в арктических условиях; как транспорт для обслуживания пассажиров между населенными пунктами расположенными в труднодоступных местах, не имеющим доступа к дорогам круглогодичного пользования; как транспорт для экологического мониторинга; как транспорт для бизнесменов и путешественников; как транспорт для охотников и рыболовов.
Известно Транспортное средство высокой проходимости, состоящие из корпуса, ходовой части и системы управления с пультом управления (патент РФ №2554900, B62D 57/028, опубл. 27.06.2015 г.).
Недостатком этого технического решения является ограниченный уровень проходимости при преодолении достаточно сильной распутицы, снежных пространств и неоправданно высокий расход горючего при преодолении этих пространств, невозможность преодоления водных пространств, невозможность его использования для перевозки пассажиров, так как велика вероятность частого опрокидывания корпуса на бок.
Известно Прыгающее транспортное средство, включающее корпус, ходовую часть и систему управления с пультом управления (патент РФ №2259298, B62D 57/02, опубл. 27.08.2005 г.).
Недостатком этого технического решения является то, что низкая проходимость передвижения в распутицу, по снегу, кроме того, из-за возникающих динамических перегрузок, невозможно его использование для перевозки пассажиров, низкая надежность взаимодействия узлов привода движителя.
Целью заявляемого технического решения является создание всесезонного, всепогодного транспортного средства высокой проходимости, обладающего сверхпроходимостью в условиях бездорожья для круглогодичного сообщения между населенными пунктами, расположенными в труднодоступных, удаленных от «большой земли» районах, как с пассажирами, так и без них и обладающего дополнительными функциями, так, например, возможностью взлетать и совершать полеты на относительно небольшие расстояния.
Техническим результатом заявляемого технического решения является повышение маневренности, проходимости и «живучести» Транспортного средства, например, без опрокидывания корпуса на бок за счет усовершенствованной конструкции, в том числе усовершенствованной и ходовой части, посредством различных заданных комбинированных движений элементов конструкции с возможностью совершения преодоления препятствий в разных средах, в нестандартных условиях движения, также предлагаемое техническое решение устраняет вышеперечисленные недостатки, приведенные в аналогах, при этом Транспортное средство высокой проходимости включает корпус, ходовую часть и систему управления с пультом управления, днище корпуса представляет собой глиссирующую поверхность и снабжено четырьмя ребрами жесткости, расположенными вдоль днища корпус попарно по обеим сторонам днища корпуса, двумя подвижными лыжами, расположенными между ребер жесткости по всей длине днища, где каждая подвижная лыжа выполнена с глиссирующей поверхностью и снабжена мини рессорами или пружинами, установленными между днищем и подвижной лыжей, четыре тормозных щитка, закрепленных на задних кромках ребер жесткости с возможностью торможения, ходовая часть расположена по обеим сторонам корпуса и содержит трансмиссию, четыре вращающихся рычага подвески, расположенные с возможностью вращения вокруг своих осей по «часовой стрелки» или против «часовой стрелки», четыре вращающихся ходовых рессоры, колесные пары, при этом колеса соединены попарно и расположены симметрично относительно осей вращения вращающихся ходовых рессор, на концах которых расположены быстросъемные крепления для колесных пар, а сами ходовые рессоры закреплены на рычагах подвески с возможностью вращения вокруг своих осей по «часовой стрелке» или против «часовой стрелки», каждая колесная пара снабжена лыжей с глиссирующей поверхностью, расположенной над колесной парой с возможностью перемещения ее из верхнего положения в нижнее положение и наоборот, восемь или шестнадцать бортовых рессор, где каждая бортовая рессора соединена с пневмо или гидроцилиндром, каждая лыжа с глиссирующей поверхностью выполнена с внутренней полостью, внутри которой расположена штанга заданных размеров и формой с механизмом выдвижения из внутренней полости и втягивания, который состоит из мини электрического мотор-редуктора червячного типа и автономного источника питания, трансмиссия выполнена с возможностью многоуровнего демпфирования силовых импульсов, возникающих при преодолении неровностей и включает в себя привод на каждую колесную пару, привод на вращение каждой ходовой рессоры и привод на вращение каждого рычага подвески, при этом каждый привод состоит из червячной и/или цепной передачи, двигателя или электромотора, большой цилиндрический корпус червячного колеса червячной пары рычага подвески выполнен из бронзы и закреплен в корпусе с возможностью вращения, червячные валы выполнены с удлиненной средней червячной частью и с удлиненной шлицевой частью на обоих концах, корпуса сферических подшипников выполнены клинообразными, червячная пара выполнена с возможностью осуществления червячным валом вращения и продольных перемещений относительно своей оси, передаваемых через соответствующее червячное колесо, которое кинематически связано через звездочку и цепь с осью вращения ходовой рессоры, на концах которой симметрично относительно оси вращения закреплена колесная пара, одна червячная пара установлена с возможностью вращения рычага подвески вокруг своей оси, а другая червячная пара вращения ходовой рессоры неподвижна вместе с неподвижной звездочкой, зафиксированной на малом цилиндре не вращающегося червячного колеса и связанной через цепь со звездочкой, насаженной на стакан оси вращения ходовой рессоры, на концах которой закреплена колесная пара, при этом обе звездочки выполнены с одинаковым числом зубьев и неподвижная звездочка расположена с возможностью при вращении рычага подвески через цепь фиксировать звездочку, насаженную на стакан рычага подвески, которая занимает в пространстве одно и то же заданное положение, и дополнительно снабжено автономной системой жизнеобеспечения, расположенной внутри корпуса и представляет собой мини-пиролизную установку с возможностью получения электрической энергии на основе эффекта Пельтье, оно дополнительно снабжено быстросъемной полостью, огибающей верхнюю часть крыши корпуса и выполненной с возможностью подачи в нее до заданного давления сжатого воздуха и спуска сжатого воздуха из нее, дополнительно снабжено биконусным аэродинамическим крылом малого удлинения круглым в плане, расположенным и закрепленным в верхней части корпуса, выполненным с возможностью раскрытия или складывания веером в виде мягкой и/или жесткой сегментной оболочки, где в каждом сегменте оболочки расположен лонжерон, в котором один из концов нижней полки каждого лонжерона закреплен к одной из двух осей вращения под углом более 90 градусов, а один из концов верхней полки каждого лонжерона закреплен к оси вращения под заданным углом также более 90 градусов, противоположные концы полок лонжеронов сходятся по периметру крыла, которое снабжено сдвоенными элевонами, выполняющими функции рулей высоты и функции элеронов и сдвоенными рулями высоты выполняющими при посадке функции тормозных щитков и/или закрылков, каждый сегмент раскрытого крыла жестко фиксируется в заданном положении с помощью механизма раскрытия крыла с дублирующей функцией по периметру, не позволяющей смещение сегментов относительно друг друга во время полета, оболочка в раскрытом положении в плане представляет собой круг, при этом биконусное аэродинамическое крыло малого удлинения выполнено с возможностью осуществления полета в режиме самолета, не срываясь в штопор, и с возможностью осуществления полета в режиме парашютирования, дополнительно снабжено двумя самолетными винтами изменяемого шага, расположенными на вертикальных стойках рулей направления, каждый из которых выполнен с возможностью создания толкающего момента при движении и осуществления взлетно-посадочные и полетные режимы, дополнительно снабжено четырьмя гусеницами, при этом каждая гусеница размещена на колесной паре и снабжена катками, закрепленными на соответствующей ходовой рессоре, дополнительно снабжено системой управления по направлению, состоящей из рулей, выполненных в виде лодочных рулей, рулей направления выполненных в виде самолетных рулей направления, силовая пластина рычага подвески соединена с большим цилиндрическим бронзовым корпусом червячного колеса с возможностью вращения по «часовой стрелке» или против «часовой стрелки», рычаг подвески установлен с возможностью синхронного и асинхронного вращения по отношению к заданным рычагам подвески электромотором, работающим от тяговых аккумуляторов через червячный вал и большой цилиндрический бронзовый корпус червячного колеса и снабжен дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем, червячные валы вращения ходовых рессор снабжены автономными электроприводами с возможностью независимого синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем, механизмы вращения колес снабжены автономными электроприводами с возможностью синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем, ходовая рессора закреплена на цилиндрическим стакане рычага подвески с возможностью вращения по «часовой стрелке» или против «часовой стрелки», ходовая рессора установлена с возможностью вращения электромотором, работающим от тяговых аккумуляторов через червячный вал, малый цилиндр червячного колеса с установленной на него звездочкой, и с возможностью передачи вращения через цепь на цилиндрический стакан рычага подвески с закрепленной к нему ходовой рессорой, малый цилиндр одного червячного колеса установлен внутри большого бронзового цилиндра другого червячного колеса, внутри малого цилиндра червячного колеса расположен вал привода ходовой части, привод ходовой части расположен на рычаге подвески и имеет промежуточный вал, привод вращения рычага подвески, привод вращения ходовой рессоры, привод вращения ходовой части расположены на рычаге подвески, и являются неотъемлемой частью рычага подвески и представляют собой единый функционально связанный механизм, рычаг подвески, ходовая рессора и валы привода ходовой части расположены с возможностью осуществления вращения независимо друг от друга по «часовой стрелке» или против «часовой стрелки» в заданной последовательности или синхронно, верхний и нижний узлы рычага подвески выполнены с возможностью передачи трех видов вращения в заданную сторону и с заданной скоростью, защита от грязи выполнена с функцией лыж с глиссирующими поверхностями, ходовая часть выполнена с возможностью осуществления смены колес на лыжи с глиссирующими поверхностями или с лыж с глиссирующими поверхностями на колеса в автоматическом режиме дистанционно за счет вращения рычагов подвески и вращения ходовых рессор вокруг своих осей вращения, ходовая часть выполнена с возможностью осуществления смены лыж с глиссирующими поверхностями на гусеницы или смены гусениц на лыжи с глиссирующими поверхностями в автоматическом режиме дистанционно за счет вращения рычагов подвески и вращения ходовых рессор вокруг своих осей вращения, ходовая часть выполнена с возможностью осуществления смены лыж с глиссирующими поверхностями или колес на подвижные лыжи и/или глиссирующее днище корпуса в автоматическом режиме дистанционно за счет поднятия ходовой части выше уровня днища за счет вращения рычагов подвески, колеса попарно смонтированы с возможностью вращения на концах ходовых рессор и расположены симметрично относительно осей вращения ходовых рессор, ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех пар колес или четырех лыж с глиссирующими поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей, ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех гусениц или двух гусениц и двух лыж с глиссирующими поверхностями сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей, ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор или при помощи четырех ходовых рессор с закрепленными на ходовых рессорах заданными опорными поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей, ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор с прикрепленными к ним бревнами сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей, ходовая часть выполнена с возможностью передвижения на восьми колесах или на четырех колесах, смонтированных попарно, при этом четыре колеса или одно в положении приподняты, ходовая часть выполнена с возможностью передвижения при постоянном вращении ходовых рессор вокруг своих осей с закрепленными на них колесами и лыжами с глиссирующими поверхностями или гусеницами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, занимающих при этом заданное положение, ходовая часть выполнена с возможностью передвижения при постоянном вращении ходовых рессор вокруг своих осей со снятыми колесными парами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, но занимающих при этом заданное положение, ребра жесткости установлены вдоль днища корпуса по два с каждой стороны днища корпуса с возможностью дополнительного обеспечения путевой устойчивости при движении по снежной или водной поверхности и разворотах транспортного средства, на задних кромках ребер жесткости дополнительно расположены четыре тормозных щитка с возможностью их выдвижения, дополнительно снабжено умножителем напряжения, расположенным с возможностью подачи на наружный металлический контур высокого напряжения, дополнительно снабжено, по меньшей мере, одним дополнительным двигателем, по меньшей мере, одним дополнительным электрогенератором и механикой с возможностью продублировать функции электропривода, дополнительно снабжено приспособлениями против скольжения или быстросъемными мини-колесами, предварительно установленными на концах выдвигаемых штанг с возможностью электропривода от автономного источника питания привода выдвигаемых штанг, червячный вал выполнен с удлиненной средней червячной частью и с удлиненной шлицевой частью с обоих концов вала, червячный вал установлен с возможностью продольных перемещений, червячный вал с одной стороны или с обеих сторон закреплен с возможностью вращения с бортовой рессорой и через бортовую рессору с пневмо или гидроцилиндром, червячный вал расположен с возможностью одновременного выполнения двух функций, передачи вращения на червячное колесо и передачи силовых импульсов, возникающих от неровностей при движении, на бортовую рессору и пневмо или гидроцилиндр для гашения, демпфирования этих импульсов, бортовые рессоры совместно с пневмо или гидроцилиндрами расположены с возможностью возврата червячного вала в исходное положение, серединной частью червячного участка совпадающей с вертикальной осью червячного колеса, лыжи с глиссирующими поверхностями смонтированы с возможностью обеспечения дополнительной остойчивости при движении по водной поверхности, корпус выполнен аэродинамической формы.
На фиг. 1 изображено Транспортное средство высокой проходимости с находящимися в контакте с поверхностью колесами, крылом малого удлинения круглым в плане в раскрытом веером виде, со сдвоенными элевонами, рулями направления, самолетными винтами, рычагами подвески, лыжами с глиссирующими поверхностями, ходовыми рессорами, вид сбоку, на фиг. 2 изображено Транспортное средство высокой проходимости с крылом малого удлинения круглым в плане в раскрытом веером виде, вид сверху, на фиг. 3 изображено Транспортное средство высокой проходимости с крылом малого удлинения в сложенном веером виде, вид сверху, на фиг. 4 изображено Транспортное средство высокой проходимости, вид сзади, на фиг. 5 изображен рычаг подвески в сборе со снятой крышкой, вид в профиль, на фиг. 6 изображен вид сбоку рычага подвески, на фиг. 7 изображено Транспортное средство высокой проходимости в исходной позиции для режима шагового передвижения корпуса при помощи вращении рычагов подвески и колесных пар, которые сохраняют при этом вращении горизонтальное положение, а также выполняют при этом передвижении функции опорных поверхностей, на фиг. 8 изображено Транспортное средство высокой проходимости в момент начала вращения рычагов подвески против «часовой стрелки» и колесных пар, сохраняющих при этом вращении горизонтальное положение, на фиг. 9 изображено Транспортное средство высокой проходимости в момент продолжения вращения рычагов подвески против «часовой стрелки» и колесных пар, сохраняющих при этом вращении горизонтальное положение, на фиг. 10 изображено Транспортное средство высокой проходимости в момент продолжения вращения рычагов подвески против «часовой стрелки» и колесных пар, сохраняющих при этом вращении горизонтальное положение и вошедших в соприкосновение с поверхностью, на фиг. 11 изображено Транспортное средство высокой проходимости в исходной позиции перед сменой колес на лыжи с глиссирующими поверхностями, которые при последующем шаговом передвижении корпуса начинают выполнять функции опорных поверхностей, на фиг. 12 изображено начало одновременного или последовательного вращения против «часовой стрелки» рычагов подвески и колесных пар вокруг своих осей вращения, на фиг. 13 изображено продолжение одновременного или последовательного вращения против «часовой стрелки» рычагов подвески и колесных пар вокруг своих осей вращения, на фиг. 14 изображено продолжение одновременного или последовательного вращения против «часовой стрелки» рычагов подвески и колесных пар вокруг своих осей вращения, на фиг. 15 изображено продолжение одновременного или последовательного вращения против «часовой стрелки» рычагов подвески и колесных пар вокруг своих осей вращения, на фиг. 16 изображено продолжение вращения против «часовой стрелки» рычагов подвески вокруг своих осей вращения в момент выполнения шагового передвижения Транспортным средством высокой проходимости при помощи уже принявших горизонтальное положение лыж с глиссирующими поверхностями, выполняющих при этом функции опорных поверхностей, на фиг. 17 изображено Транспортное средство высокой проходимости в исходной позиции для режима передвижения корпуса с помощью «гребковых», как веслами, вращательных движений колесно-лыжных или лыжно-гусеничных пар вокруг своих осей вращения, на фиг. 18 изображено начало одновременного или последовательного вращения против «часовой стрелки» рычагов подвески и колесно-лыжных пар вокруг своих осей вращения, на фиг. 19 изображено продолжение вращения против «часовой стрелки» колесно-лыжных или лыжно-гусеничных пар вокруг своих осей вращения при этом рычаги подвески могут принимать в заданный момент времени заданное наиболее выгодное положение, на фиг. 20 изображено продолжение вращения против «часовой стрелки» колесно-лыжных пар вокруг своих осей вращения при этом рычаги подвески могут принимать в заданный момент времени заданное наиболее выгодное положение, на фиг. 21 изображено продолжение вращения против «часовой стрелки» колесно-лыжных пар вокруг своих осей вращения при этом рычаги подвески могут принимать в любой момент времени наиболее выгодное положение, на фиг. 22 показано начало преодоления Транспортным средством высокой проходимости препятствия за счет вращения по «часовой стрелке» колесной или гусеничной пары на угол обеспечивающий прохождение препятствия под днищем корпуса, на фиг. 23 показано продолжение преодоления Транспортным средством высокой проходимости препятствия за счет задних движущихся колесных пар при поднятых передних парах выше уровня днища корпуса, при этом само днище опирается на препятствие и скользит по нему, на фиг. 24 показано дальнейшее преодоление Транспортным средством высокой проходимости препятствия, где передние колесные пары и рычаги подвески приняли уже заданный наиболее оптимальный угол и, находясь в соприкосновении с поверхностью вместе с задними колесными парами, способствуют дальнейшему передвижению транспортного средства, при этом задние колесные пары повернуты на заданный угол по «часовой стрелке» обеспечивая, тем самым, дальнейшее прохождение препятствия под днищем корпуса, на фиг. 25 показано дальнейшее преодоление Транспортным средством высокой проходимости препятствия, где передние колесные пары и рычаги подвески продолжают принимать заданный наиболее оптимальный угол и, находясь в соприкосновении с поверхностью вместе с задними колесными парами, способствуют дальнейшему передвижению транспортного средства, при этом задние колесные пары повернуты на заданный угол уже против «часовой стрелки», входя в соприкосновение с поверхностью, обеспечивая дальнейшее прохождение препятствия под днищем корпуса, на фиг. 26 показано начало преодоления Транспортным средством высокой проходимости высокого препятствия, где все рычаги подвески, все колесные пары приняли вертикальное нижнее положение, а из внутреннего пространства лыж с глиссирующими поверхностями выдвинуты на заданную длину штанги, крыло малого удлинения круглое в плане в сложенном положении, на фиг. 27 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, показан сработавший захват, препятствующий соскальзыванию передней части корпуса с высокого препятствия, передние штанги втянуты во внутреннее пространство передних лыж с глиссирующими поверхностями, передние рычаги подвески занимают вертикальное верхнее положение вместе с колесной парой, на фиг. 28 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, где показан сработавший захват препятствующий соскальзыванию передней части корпуса с препятствия, передние рычаги подвески заняли горизонтальное переднее положение, а передняя колесная пара занимает вертикальное положение и повернута лыжной глиссирующей поверхностью к высокому препятствию, на фиг. 29 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия за счет вращения передних рычагов подвески и передних колесных пар против «часовой стрелки», при этом высокое препятствие приближено к центру тяжести транспортного средства, на фиг. 30 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия за счет вращения передних рычагов подвески и передних колесных пар против «часовой стрелки», высокое препятствие приблизилось к центру тяжести транспортного средства, на фиг. 31 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, из внутреннего пространства передней пары лыж с глиссирующими поверхностями вновь выдвигаются штанги, передние рычаги подвески начинают принимать вместе с колесными парами заданный наиболее оптимальный угол, на фиг. 32 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, произошло пересечение высоким препятствием центра тяжести Транспортного средства, передние штанги находятся в соприкосновении с поверхностью высокого препятствия, а задние штанги втянуты во внутреннее пространство лыж с глиссирующими поверхностями, при этом задние колесные пары начали вращение против «часовой стрелки», вступив соприкосновение с высоким препятствием, на фиг. 33 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, передние штанги находятся в соприкосновении с поверхностью высокого препятствия, при вращении задних колесных пар произошло дальнейшее перемещение корпуса вперед относительно высокого препятствия, которое достигло задней части корпуса и зафиксировалось выдвинутыми четырьмя тормозными щитками для предотвращения соскальзывания корпуса с высокого препятствия, на фиг. 34 показано продолжение преодоления Транспортным средством высокой проходимости высокого препятствия, задняя часть, опираясь на высокое препятствие, дает возможность занять задним рычагам подвески вместе с колесными парами наиболее оптимальный заданный угол с последующим выдвижением штанг из внутреннего пространства лыж с глиссирующими поверхностями до соприкосновения с поверхностью, при этом высокое препятствие остается зафиксированным выдвинутыми четырьмя тормозными щитками для предотвращения соскальзывания корпуса с высокого препятствия, на фиг. 35 показано преодоление Транспортным средством высокой проходимости высокого препятствия за счет заданного поворота всех рычагов подвески против «часовой стрелки», предварительно четыре тормозные щитка были втянуты, заняв исходное положение, после чего втягиваются во внутреннее пространство лыж штанги и Транспортное средство готово к дальнейшему передвижению, на фиг. 36 показана возможность подъема передней и/или задней части корпуса при ремонте нижней части корпуса или подвижных лыж, или ремонта рулей и тормозных щитков, или для очистки (покраски) днища и подвижных лыж от грязи, снега, на фиг. 37 показано Транспортное средство с одетыми на парные колеса гусеницами и быстросъемными катками, на фиг. 38 показан разрез крыла малого удлинения круглого в плане вертикальной плоскостью для демонстрации верхней аэродинамической кривой, на фиг. 39 показан разрез лонжерона, на фиг. 40 показан разрез двух лонжеронов входящих друг в друга, на фиг. 41 показана задняя часть корпуса Транспортного средства высокой проходимости с четырьмя щитками торможения, на фиг. 42 показана задняя часть корпуса Транспортного средства высокой проходимости с рулями, самолетными винтами и рулями направления.
Возможности предлагаемого Транспортного средства высокой проходимости позволяют превратить его, своего рода, в «такси высокой проходимости», т.е. становится возможным забирать каждого пассажира от своего дома (подъезда) в одном населенном пункте и доставлять каждого пассажира до своего дома (подъезда) уже в другом населенном пункте, т.е. взлететь с земли, снежной или водной поверхности за околицей одного населенного пункта, а приземлиться (приводниться) за сотни километров на околице другого населенного пункта, что может быть быстрее и удобнее? А вызвано это следующими обстоятельствами.
С 1990 количество аэродромов в России сократилось почти в пять раз - с 1450 до 300. Сегодня местные перевозки составляют лишь 2% в общем объеме авиакомпаний, а при СССР они превышали 25%.
В настоящее время можно купить билет на самолет и вечером того же дня загорать в Таиланде. Но попробовали бы вы улететь из Нижнего Новгорода в Екатеринбург или подняться на теплоходе по Волге километров на 200. В «союзное» время и то и другое было легко достижимо.
Ныне типичный маршрут из Новосибирска в Красноярск (789 км.) пролегает через Москву - это 8 тысяч километров, плюс ожидание и пересадки в течение 6-8 часов.
В советское время из Уфы можно было вылететь в любой из 49 райцентров, сегодня такие перелеты стали невозможны и не только из вышеуказанного города, но почти на всей территории России.
Точно такая же картина наблюдается и на речном транспорте, и это там, где самая большая протяженность рек в мире (101,3 тысячи километров).
В 1990 году российский речной флот состоял из 14 тысяч грузовых и 1,7 тысяч пассажирских судов. К 2010 году судов-«пассажиров» осталось 619, средний возраст которых составляет 30 и более лет, что превышает срок их безопасной эксплуатации на 5-10 и более лет.
Кроме того, нельзя забывать, что (на 2019 год) около 15 миллионов человек (10% населения России) проживает в 28 тысячах населенных пунктах, откуда нет выхода на сеть круглогодично эксплуатируемых дорог. В итоге потенциальных пассажиров стало на 20 миллионов меньше прежних показателей. При этом мы не затрагиваем другие очень важные, возникшие за последние несколько лет изменения касающиеся ухудшения условий выживания населения, к примеру, такие; уже в двух третях (!!!) населенных пунктов России нет доступа к любым видам медицинской помощи и это реальность. За последние десять лет количество школ в России сократилось на 25 тысяч и автобусный парк, особенно в условиях бездорожья, является «слабым звеном» при перевозке школьников в школу и обратно из школы.
Возьмем Республику Саха (Якутия), размер территории которой сопоставим с Индией. И на эту огромную территорию, битком набитую полезными ископаемыми, месторождениями газа, реками, тайгой, тундрой приходится, по данным Росстата, всего 967 тыс.жителей. Что происходит с населением? С 1990 года начался отток населения, за 25 лет он составил 331 тыс.человек. 45% населенных пунктов республики вообще не имеют выхода на сеть автодорог общего пользования, где один километр дороги с твердым покрытием стоит 1.5 млрд. рублей.
На сегодняшний день рынок по вездеходной технике не занят и серьезных игроков, к сожалению, нет, поэтому и цены на более-менее серьезную технику астрономические, от 6 до 18 и выше млн, рублей.
Транспортное средство высокой проходимости обладает следующими уникальными особенностями:
во-первых, Транспортное средство высокой проходимости, дополнительно снабженное крылом малого удлинения круглым в плане, так называемый - дископлан, малое удлинение крыла позволяет выполнять полет при больших, чем обычные, углах атаки. Характерная аэродинамическая особенность - срыв потока крыла малого удлинения затягивается до углов 45-50 градусов (Су мах) в следствие возникающих в полете вихревых воздушных пространственных структур, которые индуцируют на верхней поверхности крыла вдоль хорд дополнительную скорость в следствии закручивания многочисленных вихревых жгутов, от чего возникает разряжение, а значит, и дополнительная подъемная сила (вспомним закон Бернулли - чем больше скорость жидкости в сосуде, тем меньше давление оказываемое жидкостью на стенки сосуда), которая с избытком компенсирует потери от местных срывов потока вдоль боковых и передних кромок крыла. Такой аэродинамический эффект у крыла малого удлинения усиливается с увеличением угла атаки. Поэтому круглое крыло, имея такие аэродинамические особенности, не имеет и тенденции сваливания на крыло, не срывается в штопор, что, в свою очередь, гарантирует медленное и безопасное снижение, аналогичное снижению на парашюте. То же самое произойдет и при аварийной остановке двигателя;
во-вторых, на взлетно-посадочных режимах (именно на них происходит большинство авиакатастроф в мире), между корпусом Транспортного средства высокой проходимости и землей образуется очень мощная воздушная подушка. Отсюда следует, что пока посадочная скорость не снизится до расчетной, транспортное средство высокой проходимости не коснется поверхности, например, земли, воды, снега;
в-третьих, Транспортное средство высокой проходимости также является аппаратом внеаэродромного обслуживания, что существенно снижает цены на билеты, делает их более доступными;
в-четвертых, при использовании экранного эффекта возникающего между землей, водной, снежной поверхностью (полет в непосредственной близости от земли) и круглым крылом, Транспортное средство высокой проходимости выполнено с возможностью поднятия в воздух в 4 раза больше полезной нагрузки (при той же самой мощности силовой установки и площади крыла), чем летательные аппараты других аэродинамических схем. Следует отметить, что вообще горизонтальное оперение необходимо не маневренному сверхзвуковому самолету, главным образом при больших углах атаки (взлет, посадка, выход из срыва и т.п.). В крейсерском же полете функции горизонтального оперения с успехом могут выполнять закрылки-элевоны. Однако при взлете и посадке самолет схемы «бесхвостка» уступает самолету нормальной схемы, так как крыло бесхвостого самолета не допускает механизации. Из условий продольной балансировки крыла его задняя кромка на выгоднейшем режиме полета, то есть на скорости соответствующей минимальной скорости снижения, должна быть приподнята кверху, но это ведет к уменьшению коэффициента балансированной подъемной силы и, соответственно, увеличению скорости полета;
в-пятых, Транспортное средство высокой проходимости выполнено с возможностью эксплуатации его круглый год, во всех средах и в любую погоду.
В заявленном Транспортном средстве при использовании в режиме самолета или экраноплана эти проблемы решены за счет большей абсолютной величины допустимого диапазона размещения центра масс (аэродинамического фокуса), сдвоенных элевонов, сдвоенных боковых рулей направления выполняющих также функции тормозных щитков, сдвоенных закрылков находящихся на нижнем крыле, максимальной хорды круглого крыла, то есть большая абсолютная величина допустимого диапазона размещения центра масс (аэродинамического фокуса) и сама схема с развитыми системами управления и делает Транспортное средство при его использовании в режиме самолета или экраноплана сверхманевренным и устойчивым в полете.
Транспортное средство высокой проходимости (далее по тексту - «Транспортное средство») выполнено с возможностью передвижения по шоссе, грунтовой дороге; по бездорожью; по снегу; по воде; под водой; при наличии низких препятствий; при наличии высоких препятствий; преодолевать расстояния по воздуху, и включает в себя:
корпус 1, днище 58 корпуса 1, крышу корпуса 1, ходовую часть, систему управления с пультом управления и автономную систему жизнеобеспечения.
Корпус 1 прошел продувки в аэродинамической трубе и выполнен аэродинамической формы, которая способна создавать дополнительную подъемную силу.
Днище 58 представляет собой глиссирующую поверхность и снабжено ребрами жесткости 62, расположенными вдоль днища 58 по два с каждой стороны днища 58, не выступая за корпус 1 спереди и сзади, четырьмя тормозными щитками 63 и двумя подвижными лыжами 28.
Четыре ребра жесткости 62 установлены с возможностью дополнительного обеспечения путевой устойчивости при движении по снежной или водной поверхности и разворотах транспортного средства, при этом на задних кромках ребер жесткости 62 дополнительно расположены и закреплены четыре тормозных щитка 63 с возможностью их выдвижения и с возможностью торможения ими. Тормозные щитки 63 известной конструкции в виде, например, скребка.
Подвижные лыжи 28 расположены между ребрами жесткости 62 по всей длине днища 58, не выступая за корпус 1 спереди и сзади.
Каждая подвижная лыжа 28 выполнена из композитных материалов с глиссирующей поверхностью и с возможностью смягчения ударов во время движения корпуса 1, например, по твердому насту или водной поверхности, или других неровностей, при условии, когда ходовая часть, например, колеса, лыжи с глиссирующей поверхностью расположены выше уровня днища 58 или демонтированы (сняты).
Подвижные лыжи 28 снабжены мини рессорами или пружинами 78, установленными между днищем 58 и подвижными лыжами 28.
Подвижные лыжи 28 всегда находятся в рабочем положении, частично выступая за кромки ребер жесткости, если они не демонтированы.
Ходовая часть расположена по обеим сторонам корпуса 1 и содержит трансмиссию, четыре вращающихся рычага подвески 4, 26, 23, 14, расположенных с возможностью вращения вокруг своих осей по «часовой стрелки» или против «часовой стрелки», четыре вращающиеся ходовые рессоры, например, 3 и 15, четыре колесных пары, при этом каждая колесная пара снабжена лыжей с глиссирующей поверхностью, расположенной над колесной парой с возможностью перемещения ее из верхнего положения в нижнее положение и наоборот,
Колесная пара - это колеса, смонтированные попарно, например, 13 и 16, 2 и 5, с возможностью вращения на концах ходовых рессор, например, 3 и 15, и расположены симметрично относительно осей вращения ходовых рессор, например, 3 и 15, на концах которых и расположены быстросъемные колесные крепления, ходовые рессоры крепятся на рычагах подвески 4, 26, 23, 14 с возможностью вращения вокруг своих осей по «часовой стрелки» или против «часовой стрелки».
Колеса, например, 13 и 16, 2 и 5, снабжены быстросъемными креплениями (на фигурах не показаны) на концах ходовых рессор, например, 15, 3, которые в свою очередь, крепятся к рычагам подвески 14, 4, 23, 26 с возможностью вращения вокруг своих осей вращения O1 и O4 по «часовой стрелке» или против «часовой стрелки». Рычаги подвески, например, 14, 4, расположены с возможностью вращения вокруг своих осей вращения O2 и O3 соответственно.
Колеса представляют собой колеса стандартных размеров и конструкций, например, под шины марки Good Year Eagle LS 2 255/50 R 19 107H Run Flat.
Каждая лыжа с глиссирующей поверхностью 6, 12, 24, 27 выполнена с внутренней полостью, внутри которой расположена штанга, например, 54, 55, заданных размеров и формой с механизмом выдвижения из внутренней полости, при этом механизм выдвижения состоит из мини электрического мотор-редуктора червячного типа и автономного источника питания.
На колеса, например, 13 и 16 и/или 2 и 5, дополнительно размещают легкосъемные гусеницы 74, например, марки composit BEAVER SWT, где можно осуществить заданную небольшую модернизацию, в этом случае на ходовой рессоре, например, 3 или 15, закрепляют легкосъемные катки 75, которые обеспечивают горизонтальное рабочее положение нижней поверхности гусеницы 74 при преодолении неровностей на местности или дороге.
Возможны различные комбинации использования для передвижения Транспортного средства, например,
использование четырех гусениц 74, установленных на соответствующие колесные пары, например, 2, 5 и 13, 16, с дополнительной установкой быстросъемных катков 75 на ходовых рессорах, например, 3 и 15;
или двух передних колесных пар и двух задних гусениц 74,
или двух передних лыж с глиссирующими поверхностями и двух задних гусениц 74,
двух самолетных винтов (в режиме аэросаней или глиссера с поднятыми (снятыми) или опущенными, обращенными к снежной или водной поверхности лыжами с глиссирующими поверхностями 6, 12, 24, 27,
кроме этого, возможны и другие варианты, например, в каждой паре колесных пар при движении одно из колес соприкасается с поверхностью, а второе может быть приподнято.
Гусеницы 74 представляют собой гусеницы стандартных размеров и конструкций, например, марки composit BEAVER SWT. По желанию их можно улучшить и использовать после небольшой модернизации, которая заключается в дополнительном креплении боковых опор препятствующих соскальзыванию колес с гусениц и фиксирующих, тем самым, колеса вдоль некой воображаемой линии проходящей вдоль по центру каждой гусеницы.
Колесные пары, например, 13 и 16, 2 и 5, или гусеничные пары 74 приводят в рабочее положение при повороте ходовых рессор, например, 3 и 15, с закрепленными на осях, например, O5 и О6, О7 и О8 лыжами с глиссирующими поверхностями, например, 12 и 6, вокруг своих осей вращения O1 и О4 против «часовой стрелки» на 180 градусов, при этом рычаги подвески, например, 14 и 4 делают кратковременный поворот вокруг своих осей O2 и О3 против «часовой стрелки» на заданный угол, достаточный для поворота лыж с глиссирующими поверхностями, например, 12 и 6, без касания с поверхностью или с касанием поверхности.
Колесные пары, например, 13 и 16, 2 и 5, приводят в не рабочее положение при повороте ходовых рессор, например, 3 и 15, с закрепленными на концах колесными парами, например, 13 и 16, 2 и 5, или гусеничными парами вокруг своих осей вращения O1 и O4 против «часовой стрелки» на 180 градусов, при этом рычаги подвески, например, 14 и 4, осуществляют заданный кратковременный поворот вокруг своих осей O2 и O3 против «часовой стрелки» на заданный угол достаточный для поворота этих колесных пар, например, 13 и 16, 2 и 5, без касания поверхности или с касанием поверхности.
Каждая лыжа 12 или 6, или 24, или 27 выполнена из композитных материалов с глиссирующей поверхностью и с полостью, внутри которой расположена штанга, например, штанга 54 или 55, заданных размеров и формой с механизмом выдвижения из внутренней полости и втягивания во внутреннюю поверхность, который состоит из мини электрического мотор-редуктора червячного типа и автономного источника питания, при этом лыжи с глиссирующими поверхностями 12, 6, 24, 27 имеют дополнительную функцию: защиту, например, защиту от грязи.
Каждая штанга, например, 54 или 55, дополнительно снабжена приспособлением против скольжения, закрепленным на выдвигаемом конце штанги.
Каждая штанга, например, 54 или 55, дополнительно снабжена мини - колесами, закрепленными на выдвигаемом конце штанги с возможностью вращения от автономного источника питания привода выдвигаемой штанги.
Каждая лыжа с глиссирующей поверхностью 12 или 6, или 24, или 27 дополнительно снабжена мини электрическим мотор-редуктором червячного типа, смонтированным во внутреннем пространстве с дистанционным управлением.
Лыжи с глиссирующими поверхностями 12, 6, 24, 27 выполнены с возможностью размещения выше или ниже уровня днища 58 корпуса 1 или на одном уровне.
Лыжи с глиссирующими поверхностями 12, 6, 24, 27 смонтированы в том числе и с возможностью обеспечения дополнительной остойчивости при движении по водной поверхности.
Например, глиссирующие поверхности лыж 12, 6, 24, 27 установлены на водную поверхность, обеспечивая дополнительную остойчивость при движении по водной поверхности.
Лыжи с глиссирующими поверхностями 12, 6, 24, 27 приводят в рабочее положение поворотом ходовых рессор, например, 15 или 3, на концах которых закреплены колесные пары, например, 16 и 13, вокруг своих осей вращения O1 и O4 по «часовой» или против «часовой стрелки» на 180 градусов, при этом колесные пары занимают верхнее горизонтальное положение, а лыжи с глиссирующими поверхностями нижнее горизонтальное положение, рычаги подвески, например, 14 и 4, осуществляют заданный кратковременный поворот вокруг своих осей O2 и О3 против «часовой стрелки» на заданный угол, достаточный для поворота колесных пар без касания поверхности или с касанием поверхности в верхнее горизонтальное положение.
Лыжи с глиссирующими поверхностями 6, 12, 24, 27 приводят в не рабочем положении поворотом ходовых рессор, например, 15 или 3, на концах которых закреплены колесные пары, например, 16 и 13, вокруг своих осей вращения O1 и O4 на 180 градусов против «часовой стрелки», при этом рычаги подвески, например, 14 и 4, осуществляют заданный кратковременный поворот вокруг своих осей O2 и О3 против «часовой стрелки» на заданный угол, достаточный для поворота этих колесных пар без касания поверхности или с касанием поверхности.
Защита от грязи выполнена с функцией лыж с глиссирующими поверхностями 6, 12, 24, 27.
Например, в процессе движения Транспортного средства по снежной или водной поверхности используют два самолетных винта и/или водомет (по водной поверхности), а само передвижение осуществляют на лыжах с глиссирующими поверхностями 12, 6, 24, 27, при этом одновременно могут использовать подвижные лыжи 28 и днище 58 для более плавного, мягкого хода Транспортного средства.
При ремонтных работах корпус 1 может принимать положение под углом в 45 градусов к поверхности.
Ходовая часть выполнена с возможностью:
передвижения на восьми колесах или на четырех колесах, смонтированных попарно, при этом четыре колеса или одно в положении приподняты,
пошагового передвижения при помощи четырех пар колес, сохраняющих горизонтальное или заданное положение относительно поверхности,
пошагового передвижения при помощи четырех гусениц 74, сохраняющих горизонтальное или иное положение относительно поверхности,
пошагового передвижения при помощи двух пар колес (передних или задних) и двух гусениц (задних или передних), сохраняющих горизонтальное или иное положение относительно поверхности,
пошагового передвижения с помощью четырех лыж с глиссирующими поверхностями 12, 6, 24, 27, сохраняющих горизонтальное или заданное положение относительно поверхности,
пошагового передвижения двух лыж с глиссирующими поверхностями (передних или задних) и двух гусениц 74 (задних или передних), сохраняющих горизонтальное или заданное положение относительно поверхности,
пошагового передвижения четырех ходовых рессор, например, 15 и 3, сохраняющих горизонтальное или заданное положение относительно поверхности,
пошагового передвижения при помощи четырех ходовых рессор, например, 15 и 3 с закрепленными на ходовых рессорах заданными опорными поверхностями,
пошагового передвижения при помощи четырех ходовых рессор, например, 15 и 3 с прикрепленными к ним бревнами,
передвижения на четырех колесах 13 и 16, 2 и 5, смонтированных попарно, при этом четыре колеса или одно в положении приподняты,
пошагового передвижения при помощи вращающихся рычагов подвески, например, 14 и 4, и четырех гусениц 74 или двух гусениц 74 и двух лыж с глиссирующими поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей,
пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор или при помощи четырех ходовых рессор с закрепленными на ходовых рессорах заданными опорными поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей,
пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор с прикрепленными к ним бревнами, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей,
пошагового передвижения при вращении рычагов подвески, например, 14 и 4, вокруг своих осей вращения, (см. фиг. 7, 8, 9 и 10), при этом колесные пары 13 и 16, 2 и 5, сохраняют благодаря кинематике горизонтальное положение,
пошагового передвижения корпуса 1 при вращении рычагов подвески вокруг своих осей и при сохраняющих при этом свое нижнее горизонтальное положение лыж с глиссирующими поверхностями 12, 6, 24, 27 (см. фиг. 14, 15 и 16),
передвижения при постоянном вращении ходовых рессор, к примеру, 15, 3 вокруг своих осей с закрепленными на них колесами 13 и 16, 2 и 5 или гусеницами 74 и лыжами с глиссирующими поверхностями 12, 6, 24, 27 при не вращающихся рычагах подвески, например, 14 и 4, занимающих при этом заданное положение (см. фиг. 18, 19, 20 и 21),
передвижения при постоянном вращении ходовых рессор вокруг своих осей с закрепленными на них колесами и лыжами с глиссирующими поверхностями или гусеницами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, занимающих при этом заданное положение,
передвижения при постоянном вращении ходовых рессор, к примеру 15 и 3 вокруг своих осей со снятыми колесными парами 13 и 16, 2 и 5 (снятие колес на рисунках не показано) при не вращающихся рычагах подвески, например, 14 и 4, но занимающих при этом заданное положение (аналогично фиг. 18, 19, 20 и 21),
передвижения при постоянном вращении ходовых рессор вокруг своих осей со снятыми колесными парами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, но занимающих при этом заданное положение,
передвижения при постоянном вращении ходовых рессор, примеру, 15 и 3 вокруг своих осей со снятыми колесными парами и лыжами с глиссирующими поверхностями (снятие колес и лыж на фиг. не показано) при не вращающихся рычагах подвески 14 и 4, но занимающих при этом заданное положение (аналогично фиг. 18, 19, 20 и 21),
осуществления полета в режиме экранолета или самолета, не срываясь в штопор,
осуществления смены колес, например, 13 и 16, 2 и 5, на лыжи с глиссирующими поверхностями, например, 12 и 6, или с лыж с глиссирующими поверхностями на колеса в автоматическом режиме дистанционно за счет вращения рычагов подвески, например, 14 и 4, и вращения ходовых рессор, например, 15 и 3, вокруг своих осей вращения (см. фиг. 11, 12, 13, 14, 15 и 16),
осуществления смены лыж с глиссирующими поверхностями, например, 12 и 6, на гусеницы 74 или смены гусениц на лыжи с глиссирующими поверхностями в автоматическом режиме дистанционно за счет вращения рычагов подвески, например, 14 и 4, и вращения ходовых рессор, например, 15 и 3, вокруг своих осей вращения аналогично (см. фиг. 11, 12, 13, 14, 15 и 16),
осуществления смены лыж с глиссирующими поверхностями, например, 12, 6 или колес, например, 13 и 16, 2 и 5, или гусениц 74 на подвижные лыжи 28 и/или днище 58 корпуса 1 в автоматическом режиме дистанционно за счет поднятия ходовой части выше уровня днища Описание трансмиссии транспортного средства:
Привод, например, на пару колес 13, 16 осуществляют следующим образом: включают двигатель, например, TOYOTA V8, который приводит во вращение ротор известного генератора электрического тока.
Ток подается на электромотор Peak power 67 мощностью в 50 кВт, который приводит во вращение звездочку (шестерню) 73 насаженную на вал 30. Затем, через вал 30 вращение передается на звездочку 69, цепи 31, звездочку 70, промежуточный вал 32, звездочки 71 и 72, вращение передается на вал 33 и насаженные на этот вал спаренные звездочки 34 и уже от этих спаренных звездочек через цепную передачу (не указана) вращение передается на колеса 13, 16 которые смонтированы на ходовой рессоре 15.
Привод на вращение, например, ходовой рессоры 15 вокруг оси O1 осуществляют с помощью электромотора 68, например, Peak power работающего от тяговых аккумуляторов, к примеру, SCIB Super Charge ion Battery компании Toshiba. Вращение от электромотора 68 через червячный вал 38 передается малому цилиндру червячного колеса 39 и насаженную на этот цилиндр звездочку 64, затем через цепь 40 вращение передается на цилиндрический стакан 41 с закрепленной к нему ходовой рессорой 15.
Привод на вращение, например, рычага подвески 14 вокруг оси O2 осуществляют электромотором Peak power 66, работающим от тяговых аккумуляторов, например, SCIB Super Charge ion Battery компании Toshiba wer. Электромотор приводит во вращение червячный вал 35, который передает вращение на большой цилиндрический бронзовый корпус червячного колеса 36 червячной пары 35, 36 к которому закреплена силовая пластина рычага подвески 37.
Большой цилиндрический корпус червячного колеса 36 закреплен в корпусе 50 с возможностью вращения и выполнен из бронзы для устранения трения с червячным колесом 39 и корпусом 50.
Червячные привода 35, 36, и 38, 39 имеют следующие конструктивные особенности: червячные валы 35 и 38 выполнены с удлиненной средней червячной частью и удлиненной шлицевой частью на обоих концах 48, 45 обоих червячных валах 35, 38. Шлицевые концы червячных валов 36, 38 с обеих сторон или с одной стороны входят в зацепление с возможностью вращения, например, с бортовой рессорой (пружиной) 43 благодаря двум клинообразным корпусам сферических подшипников 42 и уже через бортовую рессору 43 червячный вал 38 связан с пневмо или гидроцилиндром 44.
Привод через шлицевое соединение 47, 48 и 45, 46 на червячную пару 35, 36 и 38, 39 осуществляют с помощью электромоторов, например, Peak power, работающих от тяговых аккумуляторов, например, SCIB Super Charge ion Battery компании Toshiba, причем, в любой момент шлицевые соединения 47, 48 и 45, 46 конструктивно не могут препятствовать прохождению (передаче) силового импульса (возникающим при преодолении неровности дороги при движении транспортного средства) через ось вращения ходовых рессор, например, O1 и O2, и далее через червячные пары 35, 36 и 38, 39 на бортовую рессору 43 и гидроцилиндр 44 для демпфирования (гашения) этого импульса, т.е. этот силовой импульс, каким бы сильным он не был, на привод не передается, вследствие того, что звездочки (шестерни) привода 46, 47 червячных валов 35, 38 имеют возможность, передавая вращательный момент червячным валам 35, 38, одновременно могут скользить при этом в шлицевых соединениях при продольных колебательных перемещениях червячных валов 35, 38 которые возникают при преодолении транспортным средством неровностей.
Именно благодаря уводу бортовых рессор вместе гидроцилиндрами во внутреннее пространство корпуса 1, стало возможным осуществлять независимое вращение рычагов подвески и вращение ходовых рессор с одновременным обеспечением плавности хода.
Повышенная мягкость, плавность хода Транспортного средства для создания повышенного комфорта при езде по пересеченной местности достигается за счет 4 уровней демпфирования (гашения) силовых импульсов возникающих при преодолении неровностей дороги:
- первый уровень, - сами колеса (покрышки, камеры), например, 13, 16, 2,5.
- второй уровень, - сами ходовые рессоры, например, 15, 3.
- третий уровень, - импульс, передаваемый, к примеру, от ходовой рессоры 15 через ось вращения O1 на червячную пару 38, 39 гасится бортовой рессорой 43 червячного вала 38 и пневмо и/или гидроцилиндром 44.
- четвертый уровень, - импульс, передаваемый, к примеру, через рычаг подвески 14 и ось вращения O2 на червячную пару 35, 36 гасится, демпфируется бортовой рессорой (не указана) и пневмо и/или гидроцилиндром (не указан). При этом третий и четвертый уровни взаимно распределяют между собой возникающий силовой импульс, сглаживая его, демпфируя, растягивая во времени.
Червячная пара имеет одну известную особенность - она не имеет так называемой обратной связи. Так, например, если червячный вал 38 передает вращение в ту или другую сторону червячному колесу 39, заставляя его тем самым вращаться, то червячное колесо 39, в свою очередь, не может передать вращение на червячный вал 38, т.е. придать ему вращательное движение и если в классической известной схеме червячного редуктора червячный вал жестко закреплен относительно червячного колеса и самого корпуса и имеет лишь возможность вращения вокруг своей оси, то в нашем случае, например, червячный вал 38 имеют возможность и вращения и продольных перемещений вдоль своей оси, передаваемых через червячное колесо 39, которое, в свою очередь, кинематически связано через звездочку 64 и цепь 40 с осью вращения O1 ходовой рессоры 15, на концах которой симметрично (на равном расстоянии) относительно оси вращения закреплена колесная пара 13, 16.
То же самое относится и к червячной паре 35, 36, так как она также кинематически связана через ось O2 с рычагом подвески 14, а рычаг подвески 14, в свою очередь, через ось вращения O1 связан и с ходовой рессорой 15 и с колесной парой 13, 16. Безусловно, обе червячные пары 35, 36 и 38, 39 взаимно компенсируют друг друга, равномерно распределяя импульс при преодолении Транспортным средством любого препятствия (неровности). Очень важно понимать, что оставшийся силовой импульс при преодолении Транспортным средством любых препятствий (неровностей) на привод 47, 48 и 45, 46 и на электропривод 66, 68 не передается, т.е. абсолютно исключен какой-либо силовой удар на приводы при преодолении Транспортным средством любых препятствий (неровностей), а гашение этого оставшегося импульса беспрепятственно осуществляется, «догашивается» бортовыми рессорами и гидро и/или пневмоцелиндрами.
При вращении рычагов подвески 4, 14, 23, 26 вокруг своих осей, например, O2 и О3, на угол в 360 градусов, колесные пары, например, 2 и 5, 13 и 16, сохраняют, благодаря кинематике, именно то пространственное положение, например, горизонтальное, которое они занимали до начала вращения рычагов подвески, причем, это соблюдается без придания дополнительного вращательного движения через трансмиссию на оси O1 и O4 ходовых рессор с закрепленными на них колесными парами 2 и 5, 13 и 16.
Объясняется эта возможность следующим конструкторским решением:
когда одна червячная пара, например, 35, 36, установлена с возможностью вращения рычага подвески 14 вокруг своей оси O2, а другая червячная пара 38 и 39 вращения ходовой рессоры неподвижна вместе с неподвижной звездочкой 64, зафиксированной на малом цилиндре - стакане не вращающегося червячного колеса 39. В свою очередь неподвижная звездочка 64 связана через цепь 40 со звездочкой 65, насаженной на стакан 41 оси вращения O1 ходовой рессоры 15, на концах которой закреплена колесная пара 13, 16.
Так как обе звездочки 64 и 65 выполнены с одинаковым числом зубьев, поэтому, при вращении рычага подвески 14 звездочка 65 всегда занимает в пространстве одно и то же заданное положение, как и связанная с ней ходовая рессора 15, а, следовательно, и колесная пара 13,16.
Силовая пластина рычага подвески, например, силовая пластина рычага 37, соединена с большим цилиндрическим бронзовым корпусом червячного колеса, например, червячного колеса 36, с возможностью вращения по «часовой стрелке» или против «часовой стрелки»,
Силовая пластина рычага подвески, например, силовая пластина рычага 37, соединена с большим цилиндром червячного колеса, например, червячного колеса 36, посредством болтового соединения,
Рычаг подвески, например, рычаг подвески 14, установлен с возможностью синхронного и асинхронного вращения по отношению к заданным рычагам црдвески электромотором, работающим от тяговых аккумуляторов через червячный вал, например, червячный вал. 35, и большой цилиндрический бронзовый корпус червячного колеса, например, червячного колеса 36 и снабжен дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем.
Червячные валы вращения, например, червячный вал 35, рычага подвески, например, рычага подвески 14, снабжены автономными электроприводами с возможностью синхронного и асинхронного вращения, снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем (на фиг. не показано).
Червячные валы вращения, например, червячный вал 38, ходовой рессоры, например, ходовой рессоры 15, снабжены автономными электроприводами с возможностью независимого синхронного и асинхронного вращения, снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем (на фиг. не показано).
Червячный вал, например, червячный вал 35, выполнен с удлиненной средней червячной частью и удлиненной шлицевой частью с обоих концов червячного вала с возможностью продольных перемещений, с одной стороны или с обеих сторон закреплен с возможностью вращения с бортовой рессорой и через бортовую рессору с пневмо или гидроцилиндром.
Бортовые рессоры совместно с пневмо или гидроцилиндрами расположены с возможностью возврата червячного вала в исходное положение, серединной частью червячного участка, совпадающей с вертикальной осью червячного колеса.
Червячный вал, например, червячный вал 38, расположен с возможностью одновременного выполнения двух функций - передач, передачи вращения на червячное колесо и передачи силовых импульсов, возникающих от неровностей при движении на бортовую рессору 43, и пневмо или гидроцилиндр 44 для гашения, демпфирования этих импульсов.
Червячные валы вращения, например, червячный вал 35, рычагов подвески снабжены автономными электроприводами с возможностью синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через цепную передачу, кардан, задний мост с дифференциалом, через коробку скоростей с двигателем.
Червячные валы вращения, например, червячный вал 38, ходовых рессор снабжены автономными электроприводами с возможностью синхронного и асинхронного, т.е. независимого вращения и снабжены дублирующим приводом, соединенным через цепную передачу, кардан, задний мост с дифференциалом, через коробку скоростей с двигателем.
Механизм вращения колес, например, колес 16 и 13, снабжены автономными электроприводами с возможностью синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем.
Механизм вращения колес, например, колес 16 и 13, снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, через коробку скоростей с двигателем.
Ходовая рессора, например, 15, закреплена на цилиндрическим стакане 41 рычага подвески с возможностью вращения по «часовой стрелке» или против «часовой стрелки» и установлена с возможностью вращения электромотором, работающим от тяговых аккумуляторов через червячный вал 38, малый цилиндр червячного колеса 39 с установленной на него звездочкой 64, и с возможностью передачи вращения через цепь 40 на цилиндрический стакан 41 рычага подвески, например, 14, с закрепленной к нему ходовой рессорой, например, 15.
Малый цилиндр одного червячного колеса 39 установлен внутри большого бронзового цилиндра другого червячного колеса 36.
Внутри малого цилиндра червячного колеса 39 расположен вал привода 30 ходовой части.
Привод ходовой части расположен на рычаге подвески, например, рычаге подвески 14, и имеет промежуточный вал, например, промежуточный вал 32.
Привод вращения рычага подвески, привод вращения ходовой рессоры, привод вращения ходовой части расположены на рычаге подвески, например, рычаге подвески 14, и являются неотъемлемой частью рычага подвески, например, рычаге подвески 14, и представляют собой единый функционально связанный механизм.
Рычаг подвески, например, 14, ходовая рессора, например, 15, и валы привода ходовой части расположены с возможностью осуществления вращения независимо друг от друга по «часовой стрелке» или против «часовой стрелки» в любой последовательности или синхронно.
Верхний и нижний узлы рычага подвески, например, 14, выполнен с возможностью передачи трех видов вращения в заданную сторону и с заданной скоростью.
Рычаг подвески, например, 14, ходовая рессора, например, 15, и валы, например, вал 30, вал 32, вал 33, привода ходовой части расположены с возможностью осуществления вращения независимо друг от друга по «часовой стрелке» или против «часовой стрелке» в заданной последовательности или синхронно.
Узел рычага подвески расположен с возможностью передачи трех видов вращения в заданную сторону и с заданной скоростью через верхний узел рычага подвески.
Повышенная мягкость, плавность хода Транспортного средства для создания повышенного комфорта при езде по пересеченной местности достигается за счет многоуровнего демпфирования (гашения) силовых импульсов возникающих при преодолении неровностей дороги с помощью колес, имеющих покрышки и камеры, с помощью ходовых рессор и связанных с ними через кинематику бортовых рессор с пневмо или гидроцилиндрами и с помощью рычагов подвески также связанных через кинематику с бортовыми рессорами имеющих также пневмо или гидроцилиндры, при этом ходовые рессоры кинематически связанные с бортовыми рессорами и рычаги подвески кинематически связанные с бортовыми рессорами взаимно распределяют между собой возникающий силовой импульс, сглаживая его, демпфируя, растягивая во времени.
Система управления с пультом управления выполнена с возможностью сочетания управления Транспортным средством как машиной, как глиссером, как аэросанями, как экранопланом, как летательным аппаратом, как мини подлодкой.
Автономная система жизнеобеспечения расположена внутри корпуса 1 и представляет собой мини-пиролизную установку для получения тепла с возможностью использования эффекта Пельтье для получения электрической энергии, которую можно использовать для подзарядки батарей и освещения.
Транспортное средство высокой проходимости дополнительно снабжено:
быстросъемной полостью, например, резиновой или пластиковой полостью (на фиг. не показана), огибающей верхнюю часть крыши корпуса 1 и выполненной с возможностью подачи в нее до заданного давления сжатого воздуха для обеспечения заданной плавучести Транспортному средству под водой и спуска сжатого воздуха из нее;
двумя поворотными подпружиненными устройствами 59, выполненными с возможностью выдвижения и установлены задней части корпуса 1 с возможностью поворота Транспортного средства вправо или влево при движении по снегу или льду, или плывущего (глиссирующего) по воде;
биконусным аэродинамическим крылом малого удлинения круглым в плане 11 (далее по тексту - Крыло), расположенным и закрепленным в верхней части корпуса 1, выполненное с возможностью раскрытия или складывания веером и состоит из мягкой и/или жесткой сегментной оболочки 56, 57, где в каждом сегменте оболочки_расположен один лонжерон 17, то есть, каждый сегмент состоит из верхней и нижней оболочки, а также одного лонжерона который всегда конструктивно расположен с одного краю каждого сегмента и этот сегмент представляет собой единое целое - одно изделие, часть крыла - сегмент.
При раскрытии крыла 11 веером, сегментная оболочка в раскрытом положении представляет собой круг, в котором один из концов нижней полки каждого лонжерона закреплен к одной из двух осей вращения 77 или 78, например, 77 под углом большим 90 градусов, а один из концов верхней полки каждого лонжерона 17 закреплен к оси вращения 77 под заданным углом (с аэродинамической точки зрения), также углом большим 90 градусов, вследствие, чего при сечении крыла 11 вертикальной плоскостью (сечение А - А на фиг. 2, фиг. 38), образует верхнюю и нижнюю (нижняя кривая в силу малой кривизны на рисунке воспринимается как прямая) кривую, например, 56 (идеальную с аэродинамической точки зрения) и это при том, что и нижняя и верхняя полки лонжеронов 17 являются абсолютно прямыми (сечение Б - Б на фиг. 39), что следует из начертательной геометрии - сечение конуса вертикальной плоскостью параллельной оси вращения конуса, следовательно, если представить, что у нас два конуса поставленные друг на друга основаниями, различие между ними лишь в углах между основанием и стороной конуса.
Противоположные концы полок лонжеронов 17 сходятся по периметру крыла 11. На фиг. 39 и 40 изображено вхождение друг в друга полок лонжеронов 17: верхней полки 58 в нижнюю полку 59 соседнего лонжерона 17.
При креплении нижних и верхних кромок лонжеронов 17 к оси вращения, например, 77 под заданным наиболее оптимальным углом более 90 градусов, то с аэродинамической точки зрения, крыло 11 имеет двояковыпуклую форму.
Крыло 11 снабжено сдвоенными элевонами, которые представляют самой самолетные рули высоты и выполняют одновременно функции рулей высоты и функции элеронов и при посадке также и функции щитка и/или закрылка, расположены в заднем секторе круглого крыла, поэтому нет необходимости в хвостовой балке.
Оболочка может быть выполнена полностью из углепластика или иных современных материалов или быть комбинированной, а именно, задняя не складывающаяся веером часть крыла 11 с верхней и нижней оболочкой, сдвоенные элевоны, сдвоенные рули высоты могут быть целиком, без разбивки на сегменты, выполнены из углепластика, а боковые и передний сектора оболочки крыла 11, состоящие из сегментов, могут иметь мягкую верхнюю и нижнюю части оболочки и могут быть изготовлены из дакрона или кевлара или карбона, широко применяемых при изготовлении парусов для яхт.
Все сегменты оболочки выполнены с возможностью складываться друг в друга подобно пластиковым стаканчикам или вееру.
При раскрытии крыла 11 веером край сегмента оболочки противоположный лонжерону 17 в каждом сегменте не выходит из зацепления с соседним сегментом и находится в зафиксированном положении с лонжероном 17 соседнего сегмента в случае выполнения оболочек сегмента из углепластика. В случае изготовления верхней и нижней оболочек крыла, к примеру, из кевлара, оболочки проклеиваются и прошиваются к каждому лонжерону 17 и в этом случае при складывании крыла 11 веером оболочки складываются как меха у гармони.
Каждый сегмент раскрытого крыла 11 жестко зафиксирован на заданном месте с помощью механизма раскрытия крыла 11 с дублирующей функцией по периметру, что делает смещение сегментов относительно друг друга во время полета невозможным, при этом задний сектор оболочки крыла не выходит за габариты корпуса, также крыло 11 выполнено с возможностью создания экранного эффекта с поверхностью, что позволяет доставлять по воздуху в четыре раза больше по весу грузов по сравнению с летательными аппаратами других аэродинамических схем при одинаковой мощности двигателей и площади крыльев.
Раскрытие и складывание крыла 11 происходит в автоматическом режиме и занимает несколько секунд, коэффициент подъемной силы крыла растет до 45 градусов, при аварийной остановке двигателя в полете Транспортное средство плавно парашютирует с помощью крыла круглого в плане, используя круглое крыло как парашютную систему, при этом крыло 11 выполнено с возможностью осуществления полета в режиме самолета, не срываясь в штопор, и с возможностью осуществления полета в режиме парашютирования;
двумя самолетными винтами 7 изменяемого шага (ВИШ - винт изменяемого шага), представляющими собой известные конструкции самолетных винтов и расположены на вертикальных стойках 76 рулей направления 8, 19, каждый из самолетных винтов 7 выполнен с возможностью создания толкающего момента при движении и осуществления взлетно-посадочные и полетные режимы, то есть способен обеспечивать необходимую тягу на взлетно-посадочных режимах и непосредственно в полете, а также создавать значительный толкающий момент при движении в распутицу или при движении в гору, препятствуя при движении в гору или с горы опрокидыванию. Самолетные винты 7 можно использовать во время стоянки Транспортного средства как ветрогенераторы для получения электроэнергии. Самолетные винты 7, работая в режиме «вращение самолетных винтов под водой» не превышают расчетного порога скоростей, ведущих к их разрушению;
легкосъемными гусеницами 74, при этом каждая гусеница размещена на колесной паре, например, 13 и 16 и/или 2 и 5 и снабжена легкосъемным дополнительными катками 75. Легкосъемную гусеницу 74, например, марки composit BEAVER SWT, размещают на колесной паре, например, 13 и 16, а на соответствующей ходовой рессоре 3 или 15 закрепляют легкосъемные дополнительные катки 75, легкосъемные дополнительные катки 75 обеспечивают горизонтальное рабочее положение нижней поверхности гусеницы 74 при преодолении неровностей на местности или дороге;
система управления с пультом управления дополнительно снабжена системой управления по направлению, состоящей из двух рулей 60 и/или рулей направления 8, 19, при этом
рули 60 выполнены в виде лодочных рулей для управления Транспортным средством при движении по поверхности, например, водной поверхности, снежной поверхности, льду (в этом случае нижняя часть рулей выполнена из углеродистой стали - рулей с окантовкой нижней части из углеродистого сплава) и расположены на задней части корпуса 1 с возможностью их выдвижения ниже уровня днища корпуса 1,
рули направления 8, 19 выполнены в виде самолетных рулей направления, расположенных и закрепленных в задней части корпуса 1 на вертикальных стойках 76,
системой дистанционного управления, расположенной с возможностью использования Транспортного средства в виде беспилотного летающего аппарата,
парашютной системой, расположенной с возможностью десантирования с транспортного средства,
по меньшей мере, одним дополнительным двигателем, по меньшей мере, одним дополнительным электрогенератором и механикой с возможностью продублировать функции электропривода при комплектации Транспортного средства в арктическом, северном исполнении,
умножителем напряжения, расположенным с возможностью подачи на наружный металлический контур высокого напряжения, приспособлениями против скольжения или быстросъемными мини-колесами, предварительно установленными на концах выдвигаемых штанг, например, 54, 55, с возможностью электропривода от автономного источника питания привода выдвигаемых штанг, например, 54, 55.
Автономный источник питания привода выдвигаемых штанг, например, 54, 55, дополнительно может использоваться, например,
для оттаивания рабочей поверхности лыж с глиссирующими поверхностями 6, 12, 24, 27 или глиссирующих поверхностей при их примерзании к поверхности;
для создания импульса с помощью дистрикторного устройства, размещенного на внутренней поверхности глиссирующих поверхностей - лыж для освобождения рабочей поверхности лыж с глиссирующими поверхностями 6, 12, 24, 27 ото льда, при этом
автономный источник питания выполнен с разъемом на боковой поверхности лыж 6, 12, 24, 27 с глиссирующими поверхностями для подзарядки.
Дополнительно для защиты от диких животных через известный умножитель напряжения на наружный металлический контур корпуса 1 может подаваться высокое напряжение.
Транспортное средство высокой проходимости выполнено с возможностью преодоления невысоких препятствий в виде, например, поваленных деревьев; подъема на возвышенность, например, крутого берега; преодоления высоких препятствий, например, высоких заборов, и осуществляет движение следующим образом, при этом
на фиг. 7-10 показана последовательность шагового передвижения Транспортного средства во время бездорожья фиг. 1, фиг. 7 благодаря вращению рычагов подвески 14, 23, 27, 6 и колесных или гусеничных пар, например, 13, 16, и 2, 5, вокруг своих осей вращения. Колесные или гусеничные пары обращены, повернуты к поверхности и сохраняют при этом, при вращающихся против «часовой стрелки» рычагов подвески за счет кинематики (см. выше), горизонтальное положение - выполняют роль опорных поверхностей;
на фиг. 11-16 показана последовательность автоматической, дистанционной смены колесных или гусеничных пар на лыжи или глиссирующие поверхности, а также последующего шагового передвижения Транспортного средства фиг. 1 фиг. 11 по бездорожью. Передвижение происходит благодаря вращающимся вокруг своих осей рычагов подвески 14, 23, 27, 6 и лыжам (глиссирующим поверхностям) 16, 12, 24, 27 обращенным, повернутым к поверхности и сохраняющим в дальнейшем при вращении рычагов подвески за счет кинематики (см. выше) горизонтальное положение - выполняют роль опорных поверхностей;
на фиг. 17-21 показана последовательность передвижения корпуса транспортного средства фиг. 1, фиг. 17 по бездорожью благодаря вращению пар колес или гусениц или лыж вокруг своих осей вращения, к примеру O1 и O4, причем, рычаги подвески 6, 12, 24, 27 могут в любой момент времени повернуться в ту или другую сторону вокруг своих осей, например, O2, О3 и принять наиболее оптимальное положение относительно корпуса Транспортного средства;
на фиг. 26-35 показана последовательность преодоления высокого забора 53 Транспортным средством.
Движение Транспортного средства высокой проходимости по шоссе осуществляет следующим образом.
Движение осуществляют в стандартном режиме, когда ходовая часть оснащена колесами парами и механизмом (вращающимися рычагами подвески) автоматической регулировки клиренса, меняющимся в широком диапазоне как во время движения, так и на стоянке, что позволяет обеспечить малозаметность Транспортному средству.
Передвижение осуществляют на четырех парах колес.
Включают двигатель, например, TOYOTA V8 с заданными техническими характеристиками, который начинает вращать известный электрический генератор. От генератора необходимая мощность подается на четыре электромотора, например, Peak power мощностью по 30 кВт. каждый, например, на электромотор Peak power 67. При этом привод, например, на колесную пару 13, 16 через звездочку (шестерню) 73 имеет в случае выхода из строя электрической силовой части возможность механического дублирования через кардан и цепные передачи.
После чего Транспортное средство начинает движение по шоссе за счет вращения четырех пар колес, например, 2, 5, 13, 16 или четырех гусениц фиг. 37 или за счет вращения двух передних пар колес и двух задних гусениц или за счет вращения самолетных винтов 7 и создаваемого при этом толкающего момента, привод на колеса или гусеницы, в этом случае, может быть отключен.
Если требуется изменить направление движения транспортного средства, то уменьшают скорость вращения колесных пар, например, 2 и 5, 13 и 16, находящихся на стороне, куда необходимо направить вращение, посредством уменьшения оборотов электромотора 67.
Для поворота - разворота Транспортного средства на месте, колеса с каждой стороны корпуса вращают в разных направлениях (с одной стороны корпуса транспортного средства - вперед, с другой - назад) посредством изменения оборотов на нужном электромоторе в обратном, т.е. в противоположном направлении.
Торможение Транспортного средства осуществляют за счет снижения оборотов электродвигателей и рекуперации, а в случае механического привода за счет фрикционов.
Движение Транспортного средства высокой проходимости по бездорожью осуществляет следующим образом.
Ходовая часть оснащена четырьмя гусеницами или двумя парами колес и двумя гусеницами, - в режиме вездехода. В особых случаях, когда передвижение необходимо осуществить в особо экстремальных условиях, передвижение осуществляют, например, на четырех вращающихся ходовых рессорах или на четырех вращающихся ходовых рессорах с прикрепленными к ним бревнами.
Включают двигатель, например, TOYOTA V8 с заданными техническими характеристиками, причем, в арктическом, северном исполнении Транспортное средство снабжено двумя известными двигателями и двумя известными генераторами электрического тока, работающих независимо друг от друга или с дублирующими функциями относительно друг друга.
Привели двигателем или двигателями во вращение известный электрический генератор с пульта управления.
От генератора через пульт управления транспортным средством подали необходимую мощность непосредственно на четыре электромотора, например, Peak power 67 мощностью по 50 квт. каждый, при этом привод, например, на колесную пару 13, 16 через звездочку (шестерню) 73 может дублироваться от двигателя, в случае выхода из строя электрической части, через механику.
Движение по бездорожью осуществляют за счет вращения четырех пар колес, например, 2 и 5, 13 и 16 или четырех гусениц, или двух пар передних колес и двух задних гусениц или двух передних лыж 12, 24 и двух задних гусениц.
Если движение в стандартном режиме становится невозможным в случае перемещения Транспортного средства, например, перемещение по болоту или в очень сильную распутицу, или по песку, тогда с помощью электромоторов Peak power, например, Peak power 66, работающих от тяговых аккумуляторов, например, SCIB Super Charge ion Battery компании Toshiba, приводят во вращение с обеих сторон транспортного средства четыре продольных рычага подвески 4, 14, 23, 26, которые начинают вращение вокруг своих осей, например, O2 и О3, при этом колесные пары, например, 2 и 5, 13 и 16, сохраняя горизонтальное положение, позволяют, тем самым, осуществлять пошаговое перемещение корпуса 1 Транспортного средства (фиг. 7-10).
При необходимости дополнительно используют лыжи 6, 12, 24, 27, которые с помощью электромоторов Peak power, например, Peak power 68, за счет вращения колесных пар, например, 2 и 5, 13 и 16, вокруг своих осей вращения O1 и O4, при одновременном вращении четырех продольных рычагов подвески 4, 14, 23, 26, вокруг своих осей вращения, например, O2 и О3, занимают нижнее горизонтальное положение, позволяя, тем самым, при продолжающемся вращении четырех продольных рычагов подвески 4, 14, 23, 26, вокруг осей вращения, например, O2 и О3, осуществляют пошаговое перемещение корпуса 1 (фиг. 11 - 16), при этом самолетные винты 7 дополнительно могут быть выведены на режим создания максимальной тяги, создавая, тем самым, очень мощный толкающий момент. При необходимости колесные и/или гусеничные пары (фиг. 37), например, 2 и 5, 13 и 16, 74, с помощью электромоторов Peak power приводят в постоянное вращение вокруг своих осей O1 и O4 при не вращающихся, но занимающих при этом наиболее оптимальное положение четырех продольных рычагах подвески 4, 14, 23, 26 (фиг. 17-21). Причем электромоторы Peak power могут работать от генератора или от тяговых аккумуляторов, например, SCIB Super Charge ion Battery компании Toshiba.
При вращающихся самолетных винтах 7, благодаря создаваемой ими тяге, возможно перемещение Транспортного средства на лыжах с глиссирующими поверхностями 6, 12, 24, 27 и/или на подвижных лыжах 28 и/или на днище 58 корпуса транспортного средства не только по снегу и воде, но и в некоторых случаях по болоту, траве, грязи.
Торможение Транспортного средства осуществляют за счет снижения оборотов электродвигателей и рекуперации, а в случае механического привода за счет фрикционов и тормозных колодок.
Движение Транспортного средства высокой проходимости по снегу осуществляет следующим образом.
Когда движение осуществляют по снежной поверхности, транспортное средство представляет собой аэросани и при этом осуществляют смену ходовой части, то есть колеса или гусеницы дистанционно заменяют на лыжи с глиссирующими поверхностями 6, 12, 24, 27 и передвижение по снежной поверхности осуществляют на четырех лыжах с глиссирующими поверхностями 6, 12, 24, 27 и/или подвижных лыжах 28 и глиссирующего днища 58, или на двух передних лыжах с глиссирующими поверхностями 12, 24 и на двух задних гусеницах 74.
Включают известный двигатель, например, TOYOTA V8, с заданными техническими характеристиками. Привели двигателем во вращение известный электрический генератор. От генератора через пульт управления транспортным средством подали необходимую мощность непосредственно на два электромотора Peak power мощностью по 50 квт., каждый из которых связан через клиноременную передачу с самолетными винтами 7 и за счет создания этими винтами 7 толкающего момента транспортное средство осуществляет движение по снегу на четырех лыжах 6, 12, 24, 27, приведя их в рабочее положение при подняв колесные пары в нерабочее положение, и/или на подвижных лыжах 28, приведя их в рабочее положение и подняв лыжи с глиссирующими поверхностями выше уровня днища и/или днище 58, подняв колесные пары в нерабочее положение, корпуса 1 (фиг. 41, 42). Управление по направлению осуществляют за счет двух подпружиненных рулей 60 с окантовкой нижней части перьев рулей 60 углеродистой сталью, а также рулями направления 8, 19.
Торможение Транспортного средства осуществляют четырьмя выдвижными щитками 63, расположенными в задней части корпуса 1 на ребрах жесткости 62 днища 58, а также за счет одновременного поворота рулей направления 8 и 19 в разные стороны на угол в 90 градусов к набегающему воздушному потоку и выпуска сдвоенных щитков -закрылков 20, элевонов 18, 22 и/или за счет реверса самолетных винтов 7.
Движение Транспортного средства высокой проходимости по воде осуществляет следующим образом.
При движении Транспортного средства высокой проходимости по водной поверхности, осуществляют смену движителя ходовой части на лыжи с глиссирующими поверхностями 6, 12, 24, 27, и Транспортное средство в режиме аэроглиссера, при этом передвижение осуществляют на четырех лыжах с глиссирующими поверхностями 6, 12, 24, 27 и/или подвижных лыжах 28 и/или глиссирующего днища 58 корпуса 1.
Включают двигатель, например, TOYOTA V8, и приводят во вращение известный генератор электрического тока. От генератора через пульт управления транспортным средством подаем необходимую мощность непосредственно на два электромотора Peak power мощностью по 50 кВт., каждый из которых связан через клиноременную передачу с двумя самолетными винтами 7. За счет создания этими винтами 7 мощного толкающего момента Транспортное средство может осуществлять движение - глиссирование по водной поверхности благодаря наличию лыж с глиссирующей поверхностью 14, 24, 27, 6 и/или подвижных лыж 28 и глиссирующего днища 58 корпуса 1, которые привели в контакт с водой -в рабочее положение.
При этом предварительно колесные пары привели в не рабочее положение.
При выходе Транспортного средства на глиссирование - движение по воде осуществляется с помощью лыж с глиссирующими поверхностями 12, 24, 6, 27, днище 58 вместе с подвижными лыжами 28 может выходить из соприкосновения с водой, при этом лыжи с глиссирующими поверхностями 12 и 24, 6 и 27, максимально разнесенные в стороны относительно корпуса 1 и находящиеся в контакте с водной поверхностью, придают Транспортному средству дополнительную остойчивость.
Транспортное средство дополнительно оснащено водометом и/или лодочными моторами.
Торможение Транспортного средства осуществляют за счет поворота в разные стороны на 90 градусов к набегающему водному потоку рулей 59, 60, а также за счет поворота рулей направления 8 и 19 повернутых одновременно в разные стороны на угол в 90 градусов к набегающему воздушному потоку, а также выпуска сдвоенных щитков - закрылков 20, элевонов 18, 22 и/или за счет реверса самолетных винтов 7.
Лыжи с глиссирующими поверхностями 12, 24, 6, 27, и подвижные лыжи 28, например, изготовлены из композитных материалов.
Корпус 1 вместе с днищем 58 изготовлен, например, из композитных материалов.
Движение Транспортного средства высокой проходимости под водой осуществляет следующим образом.
Движение Транспортного средства высокой проходимости под водой, по дну неглубокого водоема или озера осуществляют за счет вращения колесных пар или гусениц электромоторами, работающих от тяговых аккумуляторов. Движение на подвижных лыжах 28 и/или днище 58 корпуса осуществляют с помощью электромоторов, работающих от тяговых аккумуляторов и вращающих два самолетных винта со скоростями не приводящих самолетные винты к разрушению и/или водометов. Также возможно передвижение под водой в режиме мини подлодки, при этом движителем могут также использоваться на малых оборотах самолетные винты и/или водометы, работающие от тяговых аккумуляторов, а обеспечение нужной плавучести Транспортного средства под водой достигают с помощью плоской быстросъемной, например, резиновой полости, огибающей верхнюю часть (крышу) корпуса 1, в которую подают или спускают сжатый воздух.
При необходимости Транспортное средство может быть укомплектовано быстросъемной дифферентной, она же балластная, системой и мини перископом.
Привод на ходовую часть осуществляют с помощью двух электромоторов, к примеру, Peak power по 50 кВт. каждый, работающих от тяговых известных аккумуляторов, например, SCIB Super Charge ion Battery компании Toshiba.
Движение Транспортного средства высокой проходимости в воздухе осуществляет следующим образом.
При осуществлении полета Транспортным средством на каком-то значительном расстоянии от земли это транспортное средство представляет собой самолет.При полете вблизи поверхности земли, снежной или водной поверхности транспортное средство представляет собой - экранолет в самолетном режиме.
Включают известный двигатель, например, TOYOTA V8, с заданными техническими характеристиками, который приводит во вращение генератор электрического тока.
Крыло 11 приводят в рабочее положение, а именно, раскрывают его из положения сложенного веера 25, в положение - в виде круга 11.
Два известных электромотора, например, марки Peak power мощностью по 50 кВт, каждый из которых связан с двумя самолетными винтами 7 посредством клиноременной передачи.
При этом в случае выхода из строя или остановки двигателя V8 происходит автоматическое переключение электромоторов на тяговые аккумуляторы, например, SCIB Super Charge ion Battery компании Toshiba.
При подаче заданной мощности на электромоторы самолетные винты 7 начинают вращение и при выводе самолетных винтов 7 на режим взлета Транспортное средство осуществляет движение с ускорением по поверхности, например, снежной или водной поверхности, или по земле (шоссе) с последующим взлетом.
Взлет осуществляют с лыж 6, 12, 24, 27 с глиссирующими поверхностями или с колес, или с гусениц, или с глиссирующих поверхностей подвижных лыж 28 и/или глиссирующего днища 58, когда самолетные винты 7 работают в режиме взлета.
При этом лыжи 6, 12, 24, 27 с глиссирующими поверхностями в рабочем положении, а колесные пары, подвижные лыжи 28 и днище 58 в не рабочем положении или
колесные пары в рабочем положении, а лыжи 6, 12, 24, 27 с глиссирующими поверхностями, подвижные лыжи 28 и днище 58 в не рабочем положении или
подвижные лыжи 28 в рабочем положении, а колесные пары, лыжи 6, 12, 24, 27 с глиссирующими поверхностями и днище 58 в не рабочем положении или
днище 58 в рабочем положении, а колесные пары, лыжи 6, 12, 24, 27 с глиссирующими поверхностями и подвижные лыжи 28 в не рабочем положении.
Движение Транспортного средства высокой проходимости по земле с преодолением низких препятствий осуществляет следующим образом. Передвижение осуществляют на четырех пар колес или гусеницах.
Включают известный двигатель, например, TOYOTA V8, с заданными техническими характеристиками.
Транспортное средство, перемещаясь наезжает корпусом 1 на низкое препятствие 52 (фиг. 22), после чего рычаг подвески, например, 14 начинает вращение против «часовой стрелки» вокруг оси O2, одновременно колесная пара 13, 16 начинает вращение по «часовой стрелке» вокруг своей оси O1 до положения обеспечивающего горизонтальное положение корпуса 1. При достижении препятствием 52 оси вращения O1 колесной пары 13, 16, эта колесная пара за счет вращения рычага подвески, например, 14 вокруг своей оси O2 против «часовой стрелки» переводится в переднее положение, после чего колесная пара 13, 16, осуществив вращение против «часовой стрелки» вокруг своей оси O1, входит в соприкосновение с поверхностью для продолжения передвижения корпуса 1 (фиг. 23, 24). При приближении препятствия 52 к колесной паре 2, 5 начинает вращение против «часовой стрелки» рычаг подвески 4 вокруг собственной оси О3, а колесная пара 2, 5 одновременно начинает вращение по «часовой стрелке» вокруг собственной оси O4 до положения обеспечивающего горизонтальное положение корпуса 1 (фиг. 24). При достижении препятствием 52 оси вращения O4 колесной пары 12, 5, эта колесная пара за счет вращения рычага подвески 4 вокруг своей оси O2 против «часовой стрелки» переводится в переднее положение, после чего колесная пара 13, 16, осуществив вращение против «часовой стрелки» вокруг своей оси O1, входит в соприкосновение с поверхностью для продолжения передвижения корпуса 1 (фиг. 25). Препятствие 52 преодолено. Для отслеживания возникающих по ходу движения Транспортного средства препятствий и их отслеживания относительно корпуса 1 можно применять датчики и бортовой компьютер, дополнительно размещенные в корпусе 1, в этом случае транспортное средство будет преодолевать препятствия в автоматическом режиме.
Движение Транспортного средства высокой проходимости по земле с преодолением высоких препятствий осуществляет следующим образом.
Включают известный двигатель, например, TOYOTA V8, с заданными техническими характеристиками.
Транспортное средство подъезжает вплотную к высокому препятствию 53, рычаги подвески 4, 14, 23, 26 приводят в вертикальное нижнее положение, приводят в вертикальное положение и все четыре пары колес или гусеницы, например, лыжами с глиссирующими поверхностями 6, 12, 24, 27 вперед. После этого из внутреннего пространства - полости лыж с глиссирующими поверхностями 6, 12, 24, 27 выдвигают штанги, например, 54, 55, которые, входя в контакт с поверхностью, выдвигаясь из лыж с глиссирующими поверхностями 6, 12, 24, 27, поднимают Транспортное средство на заданную высоту, которая обеспечивает поднятие Транспортного средства над препятствием (фиг. 26), тем самым максимально увеличивая клиренс Транспортного средства. Штанги, например, 54, 55, могут выдвигаться или втягиваться во внутреннее пространство лыж с глиссирующими поверхностями 6, 12, 24, 27 всеми известными способами.
Выдвигаемые концы штанг, например, 54, 55, дополнительно снабжены быстросъемными приспособлениями, например, приспособлениями против скольжения, мини колесами.
На выдвигаемых концах штанг, например, 54, 55, закреплены быстросъемные мини колеса.
Упираясь передними штангами, например, 54, 55, в поверхность, Транспортное средство перемещают вперед за счет малого вращения рычагов подвески 4, 14, 23, 26 вокруг своих осей, например, O2, O3 против «часовой стрелки» до момента нависая передней части корпуса 1 над препятствием 53, например, в виде высокого забора, и срабатывания захвата 51 препятствующему соскальзыванию передней части корпуса 1 с препятствия 53 (фиг. 26, 27). После фиксации захватом 51 передней части корпуса 1 с верхней частью препятствия 53, передние штанги, например, 54, 55, втягивают во внутреннее пространство передних лыж с глиссирующими поверхностями 6, 12, после чего приводят во вращение передние рычаги подвески 14, 23 вокруг своих осей вращения, поворачиваясь на заданный угол, например, 330 градусов, против «часовой стрелки» при одновременном вращении передних колесных пар или гусениц, или лыж с глиссирующими поверхностями 6, 12, 24, 27 вокруг своих осей вращения против «часовой стрелки» (фиг. 28).
Благодаря продолжающемуся вращению передних колесных пар или гусениц, или лыж с глиссирующими поверхностями 6, 12 они входят в соприкосновение с обратной стороной препятствия 53 и создают, тем самым, усилие достаточное для перемещения (скольжения) корпуса 1 по верхней поверхности препятствия 53 (фиг. 29). Перемещение относительно корпуса 1 и верхней части препятствия 53 осуществляется до тех пор, пока верхняя часть препятствия 53 не достигнет заданного расстояния до условной линии центра тяжести транспортного средства (фиг. 30), которое обеспечивает преодоление препятствия 53. После этого передние рычаги подвески 14, 23 и передняя колесная пара или гусеничная пара, или пара лыж с глиссирующими поверхностями 6, 12, вновь принимают вертикальное нижнее положение, после чего из внутреннего пространства передних лыж с глиссирующими поверхностями 6, 12 выдвигают штанги, например, 54, 55, до соприкосновения с поверхностью (фиг. 31, 32). Затем, за счет заданного небольшого поворота всех четырех рычагов подвески 14, 23, 4, 26 вокруг своих осей против «часовой стрелки» произойдет дальнейшее перемещение (скольжение) корпуса 1 относительно верхней поверхности препятствия 53, благодаря чему происходит пересечение препятствием 53 условной линии центра тяжести транспортного средства (фиг. 31, 32). После чего приводят во вращение задние рычаги подвески 4, 26 (фиг. 3) вокруг своих осей против «часовой стрелки» поворачиваясь на заданный угол, например, 330 градусов, при одновременном вращении задних колесных пар или гусеничных пар, или пары лыж 24, 27 вокруг своих осей против «часовой стрелки». Благодаря вращению задних колесных пар или гусеничных пар, или пары лыж с глиссирующими поверхностями 24, 27 они входят в соприкосновение с обратной стороной препятствия 53 и создают, тем самым, усилие достаточное для дальнейшего перемещения (скольжения) корпуса 1 по верхней поверхности препятствия 53.
Перемещение корпуса 1 относительно верхней части препятствия 53 осуществляется до тех пор, пока верхняя часть препятствия 53 не достигнет задней части корпуса 1 (фиг. 33). Роль задних захватов от соскальзывания задней части корпуса 1 с препятствия 53 выполняют четыре выдвижных щитка торможения. После этого задние рычаги подвески 4, 26 и задняя колесная пара или гусеничная пара, или пара лыж с глиссирующими поверхностями 24, 27 приводится в вертикальное нижнее положение и из внутреннего пространства задних лыж выдвигаются штанги, например, 54, 55, до соприкосновения с поверхностью. После чего четыре тормозных щитка втягиваются обратно в исходное положение и за счет заданного малого поворота всех четырех рычагов подвески 14, 23, 4, 26 вокруг своих осей вращения против «часовой стрелки» происходит окончательное преодоление препятствия 53 (фиг. 34, 35). После этого все штанги, например, 54, 55, одновременно втягиваются во внутреннее пространство лыж с глиссирующими поверхностями 6, 12, 24, 27, а колесные пары или гусеничные пары, или пары лыж с глиссирующими поверхностями 6, 12, 24, 27 принимают нижнее горизонтальное положение.
Пример 1.
Транспортное средство с ходовой частью на колесном ходу начинает движение по шоссе для чего включили двигатель марки TOYOTA V8, который начинает вращать электрический генератор. От генератора с помощью пульта управления через силовую электрическую часть подается необходимая мощность на четыре электромотора марки Peak power мощностью по 50 квт.каждый.
В результате чего Транспортное средство начинает движение по шоссе за счет вращения четырех пар колес с шинами марки Good Year Eagle LS 2 255/50 R 19 107H Run Flat при со скоростью 100 км/час. Если требуется изменить направление движения транспортного средства, то уменьшаем скорость вращения колесных пар, например, 2 и 5, 13 и 16, находящихся на стороне, куда необходимо направить вращение, посредством уменьшения оборотов электромотора 67, а также за счет торможения тормозных барабанов тормозными лентами.
Для поворота Транспортного средства на месте, колеса с каждой стороны корпуса вращают в разных направлениях (с одной стороны транспортного средства - вперед, с другой - назад) посредством изменения оборотов на электромоторе в обратном, т.е. в противоположном направлении.
Торможение Транспортного средства осуществляют за счет снижения оборотов электродвигателей и рекуперации, а также за счет тормозных барабанов и тормозных лент.
Привод на колесную пару 13, 16 через звездочку 73 дублируют от двигателя через коробку передач, из-за выхода из строя силовой электрической части, через кардан, задний мост с дифференциалом и тормозные барабаны с тормозными лентами.
Пример 2.
Транспортное средство с ходовой частью на гусеничном ходу начинает движение по дороге, на которой присутствуют поваленные деревья, для чего включили двигатель марки TOYOTA V8, который приводит во вращение генератор электрического тока.
Через пульт управления и силовую электрическую часть подаем мощность по 50 квт. на электродвигатели марки Peak power, в результате чего Транспортное средство, перемещаясь наезжает корпусом 1 на препятствие в виде поваленного дерева, после чего рычаг подвески 14 с помощью электродвигателя марки Peak power начинает вращение против «часовой стрелки» вокруг оси O2, одновременно гусеничная пара, размещенная на колесной паре 13, 16, с помощью электродвигателя марки Peak power начинает вращение по «часовой стрелке» вокруг своей оси O1 до положения обеспечивающего горизонтальное положение корпуса 1.
Использованы гусеницы марки composit BEAVER SWT.
При достижении поваленным деревом оси вращения O1 гусеничной пары, эта пара с помощью электродвигателя марки Peak power за счет вращения рычага подвески 14 вокруг своей оси O2 против «часовой стрелки» переводится в переднее положение, после чего эта гусеничная пара осуществив вращение против «часовой стрелки» вокруг своей оси O1 входит в соприкосновение с поверхностью для дальнейшего передвижения корпуса 1. При приближении поваленного дерева к гусеничной паре 2, 5 начинает вращение с помощью электродвигателя марки Peak power против «часовой стрелки» рычаг подвески 4 вокруг собственной оси О3, а гусеничная пара 2, 5 одновременно начинает вращение по «часовой стрелке» вокруг собственной оси O4 до положения обеспечивающего горизонтальное положение корпуса 1. При достижении поваленным деревом 52 оси вращения O4 гусеничной пары 12, 5, эта гусеничная пара за счет вращения рычага подвески 4 вокруг своей оси O2 против «часовой стрелки» переводится в переднее положение, после чего гусеничная пара осуществив вращение против «часовой стрелки» вокруг своей оси O1 входит в соприкосновение с поверхностью для дальнейшего передвижения корпуса 1. Препятствие в виде поваленного дерева преодолено.
Для отслеживания возникающих по ходу движения Транспортного средства препятствий и их отслеживания относительно корпуса 1 применяли датчики и бортовой компьютер, которые обеспечили преодоление препятствия в автоматическом режиме.
Заявленное техническое решение представляет собой всесезонное, всепогодное транспортное средство с возможностью взлетать и совершать полеты на небольшие расстояния, сверхпроходимостью в условиях бездорожья для круглогодичного сообщения между населенными пунктами, расположенными в труднодоступных, удаленных от «большой земли» районах, относящееся к специальным самоходным транспортным средствам высокой проходимости и которое может использоваться как транспорт в боевых воздушных, сухопутных или подводных роботах; в военных целях, для спецназа, для МЧС; для охраны лесов и заповедников; для тушения пожаров, как с воздуха, так и с земли; для скорой помощи; для нефтяников - при оснащении тепловизорами, системами радио и телеметрии, для обслуживания пассажиров между населенными пунктами расположенными в труднодоступных местах, не имеющим доступа к дорогам круглогодичного пользования; для экологического мониторинга; для бизнесменов и путешественников; для охотников и рыболовов, а также как патрульное судно для пограничной службы и береговой охраны; как лаборатория на обнаружении выхода нефти, газа, обслуживании поисковых и геологоразведочных работ, обеспечения работ в арктических условиях,
при наличии повышенной маневренности, проходимости и живучести Транспортного средства за счет возможности совершения различных комбинированных движений при преодолении препятствий в разных средах за счет конструктивных решений, в том числе корпуса и ходовой части, посредством различных заданных комбинированных движений элементов конструкции с возможностью совершения преодоления препятствий в разных средах, в нестандартных условиях движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выращивания сельскохозяйственных культур с формированием и поддержанием двухуровневой структуры почвы | 2021 |
|
RU2826106C2 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| РОЛИКОВОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2019 |
|
RU2745724C2 |
| Гусеничный лежачий электроскутер | 2022 |
|
RU2793388C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| КРЕПЛЕНИЕ МОДУЛЯ НА АВТОМОБИЛЬ И УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ МОДУЛЬ С ЭТИМ КРЕПЛЕНИЕМ | 2017 |
|
RU2652483C1 |
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2308396C1 |
| Подвеска и гусеница для снегохода | 2016 |
|
RU2661645C2 |
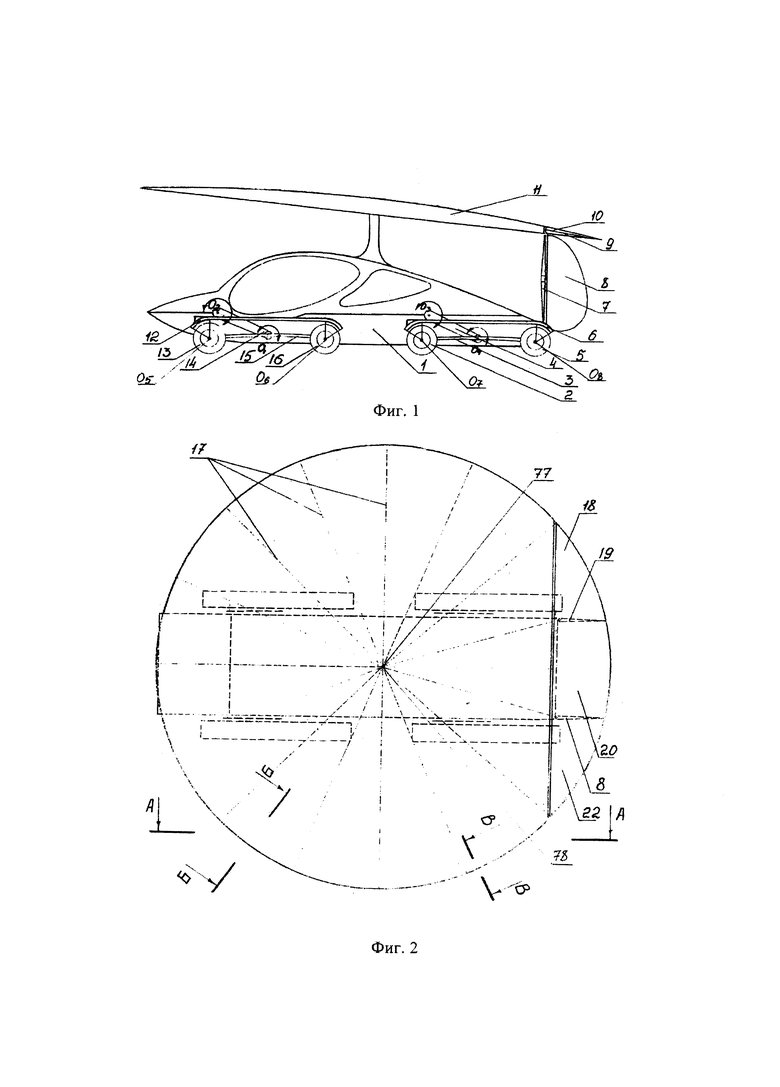
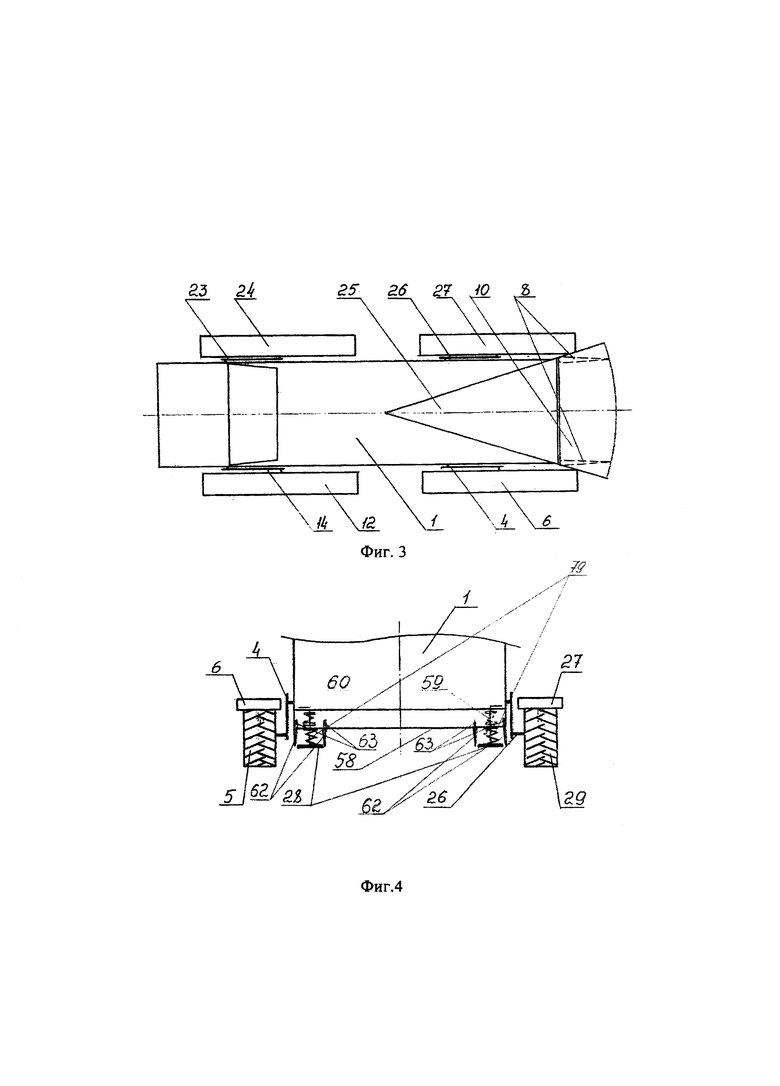
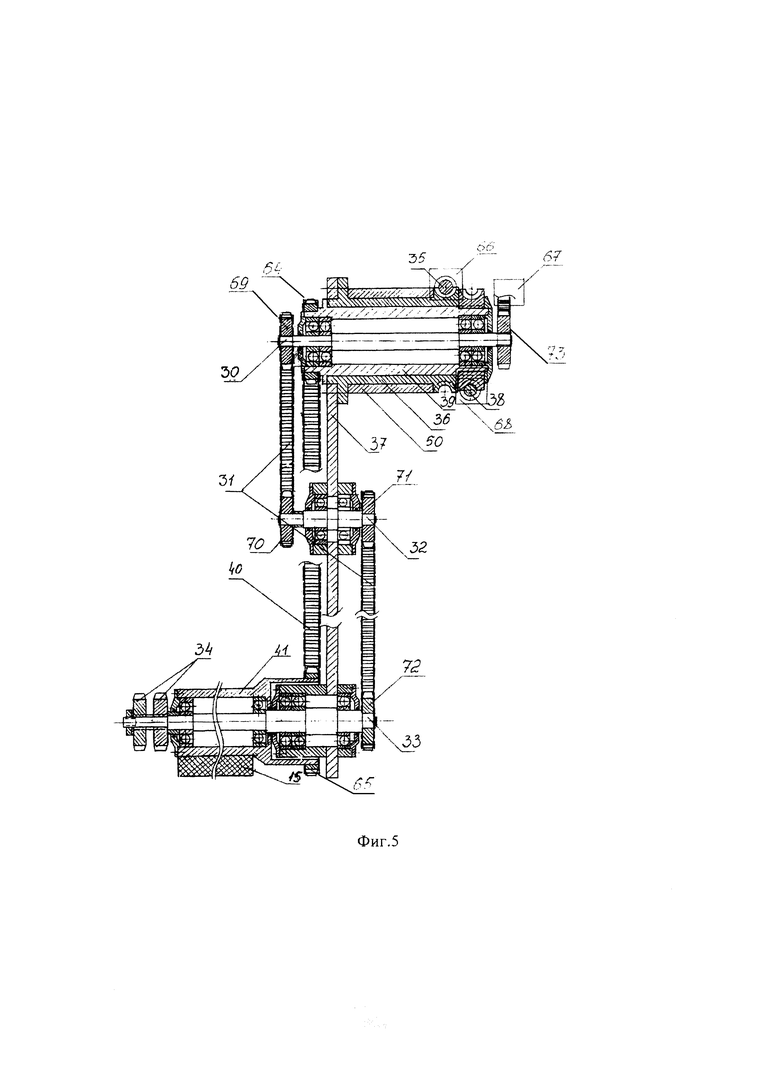
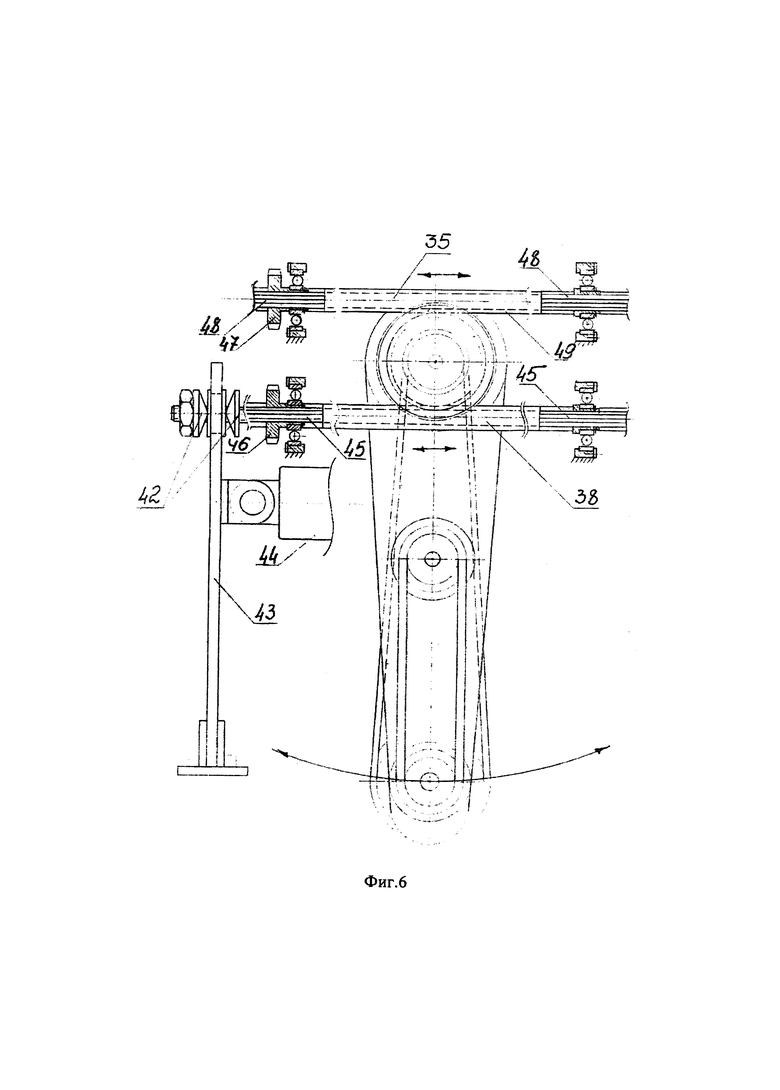
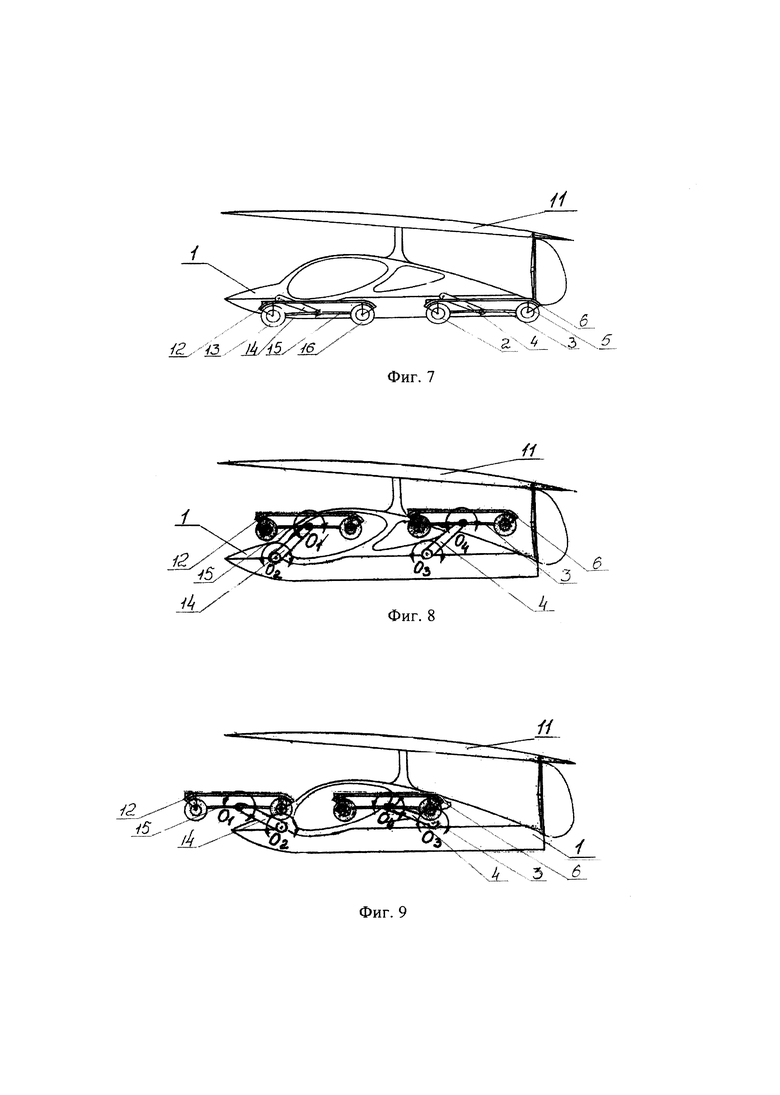
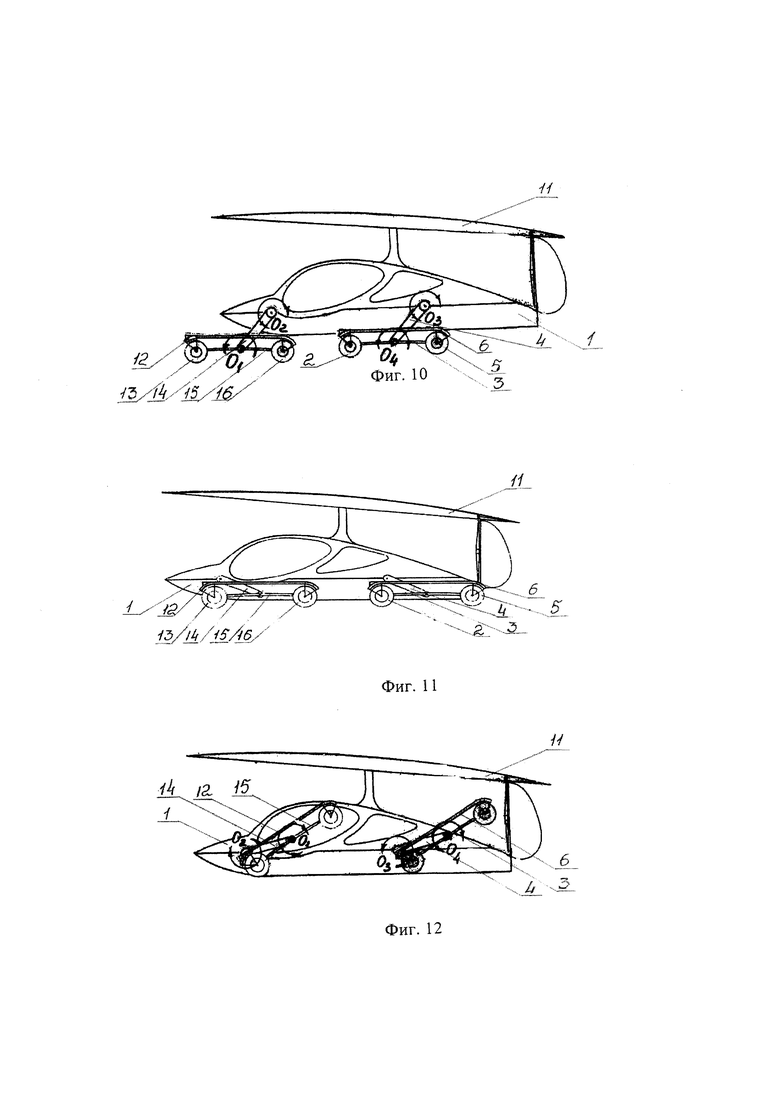

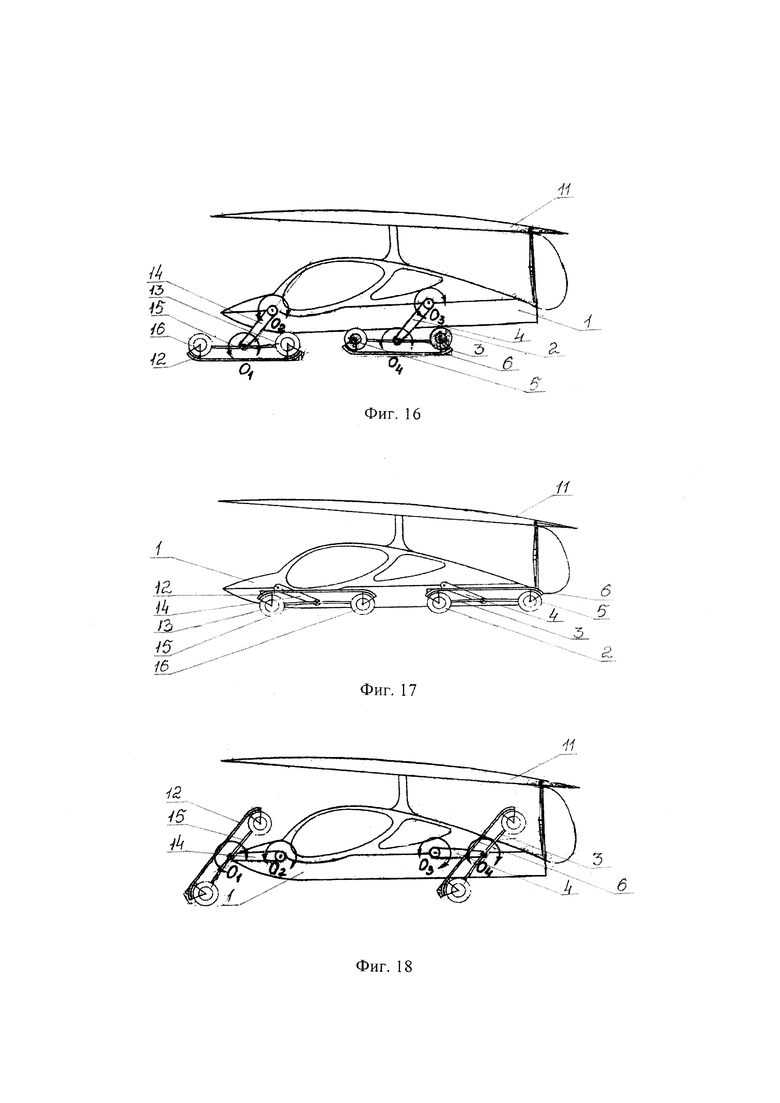
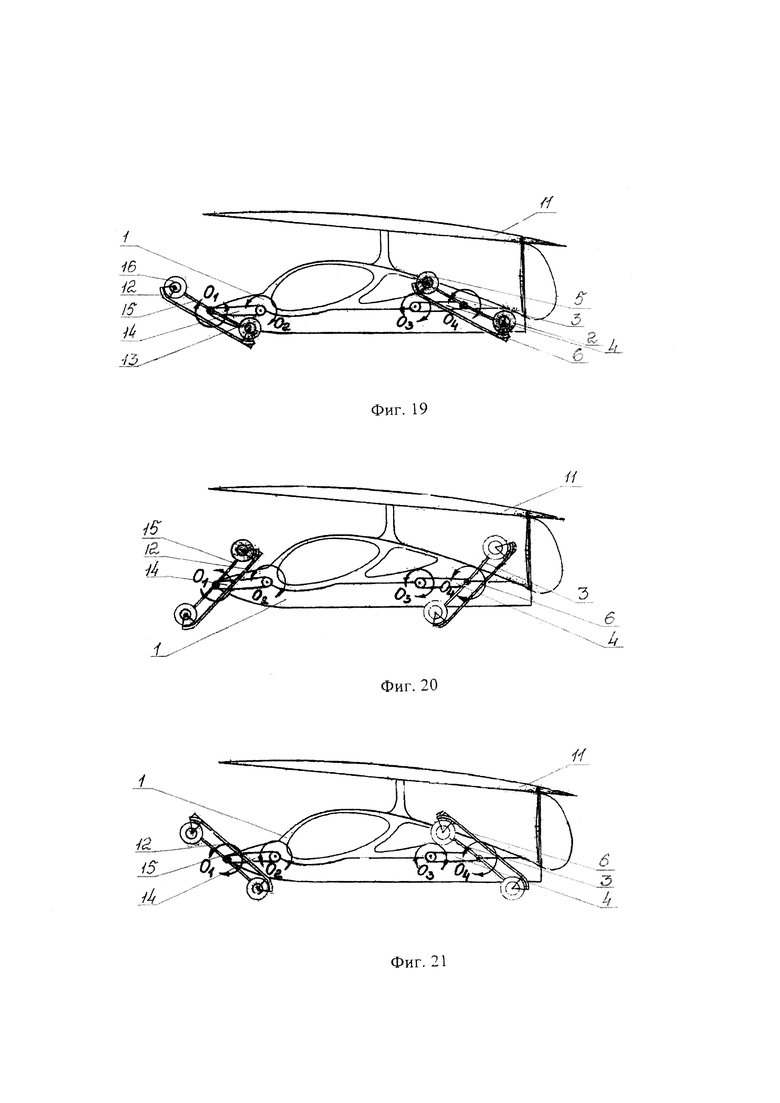
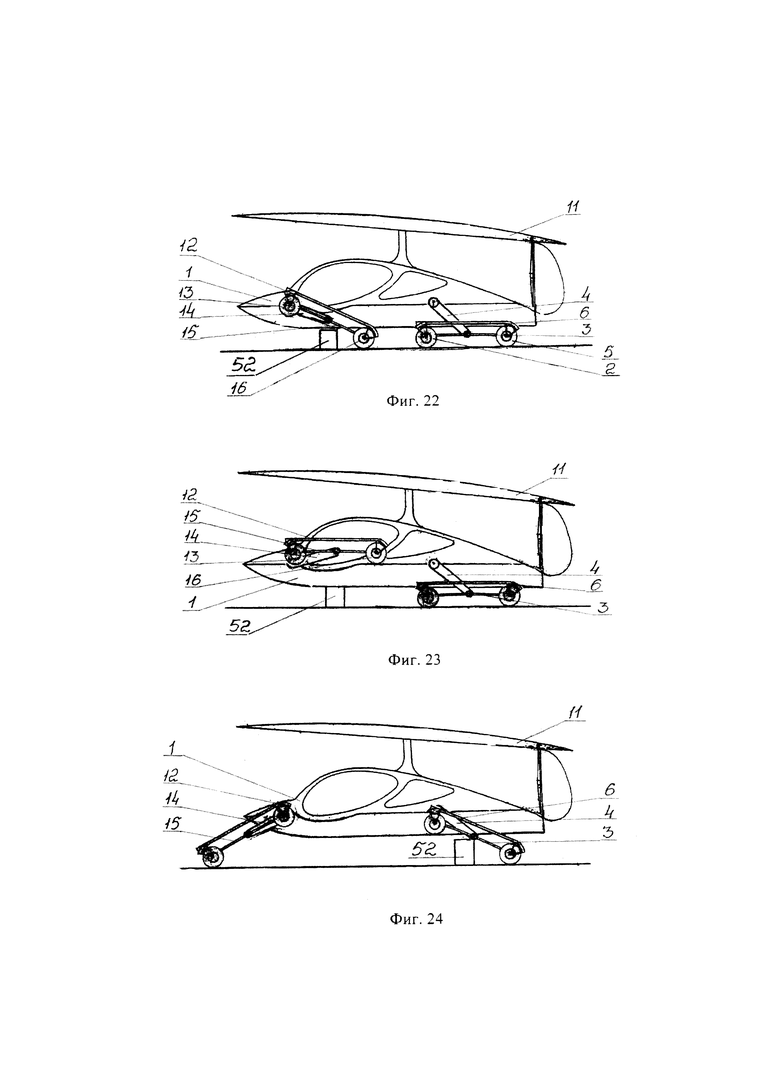
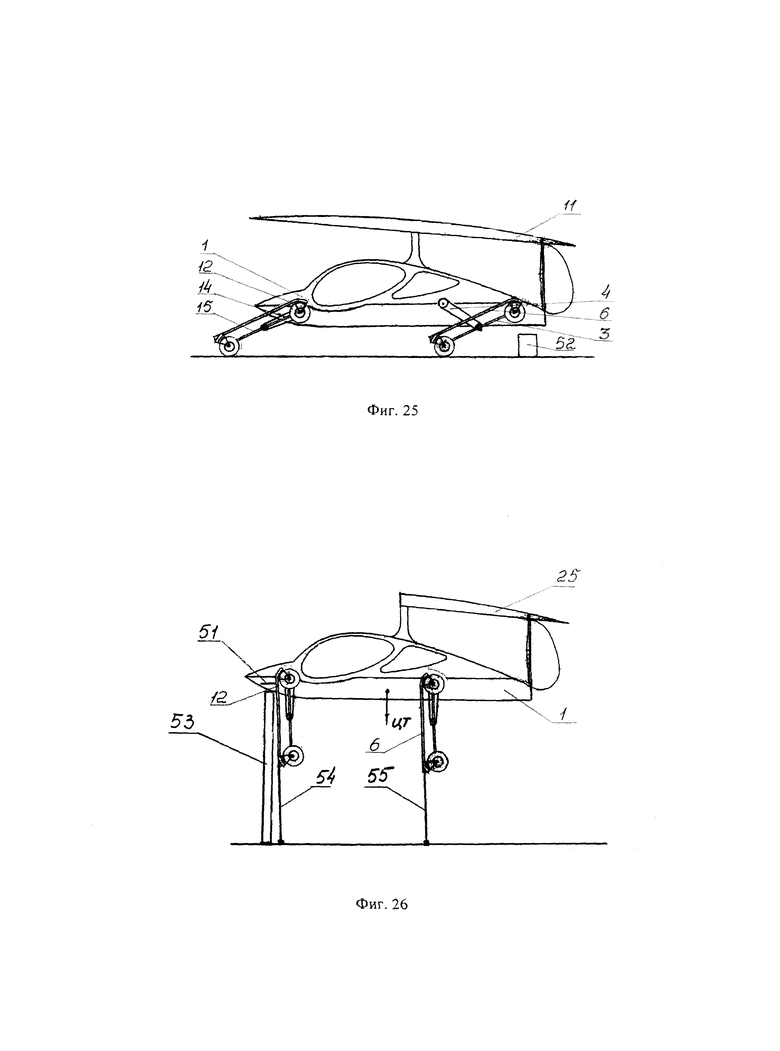
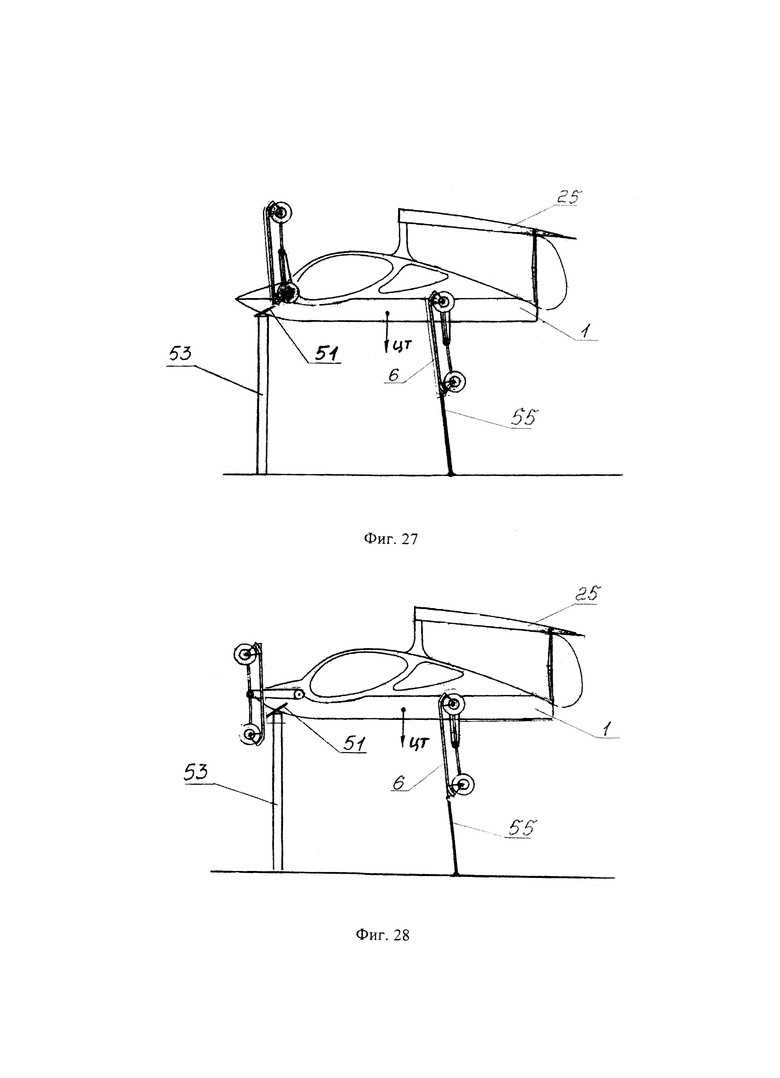
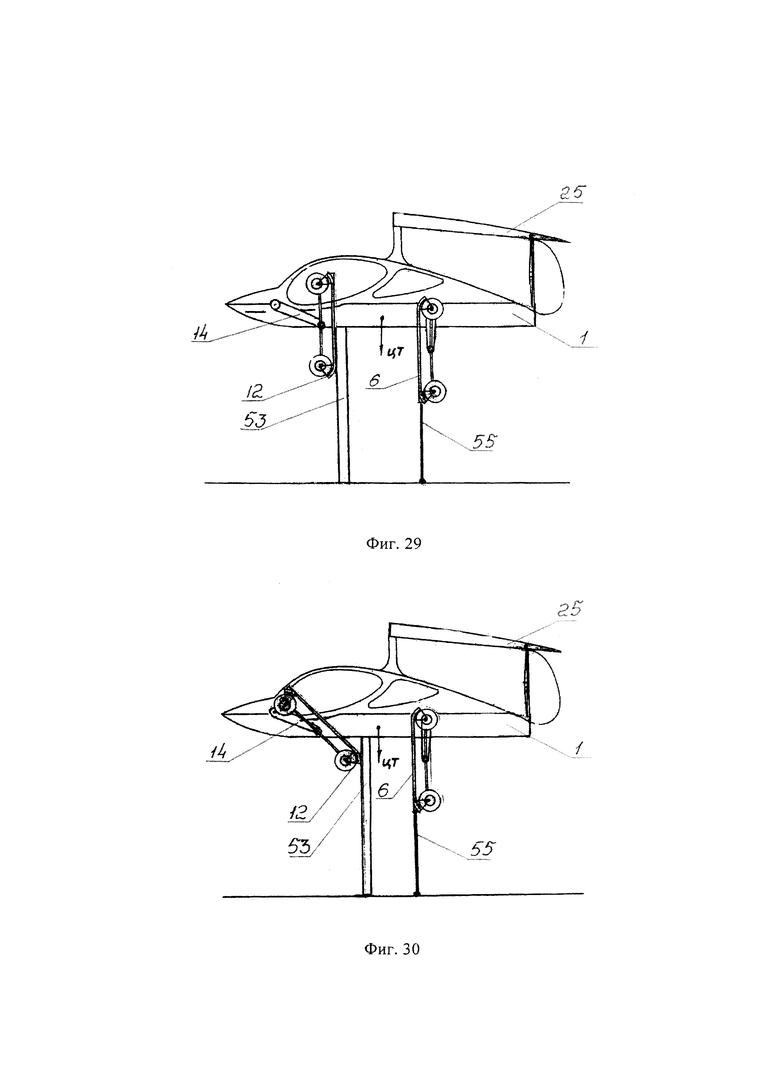
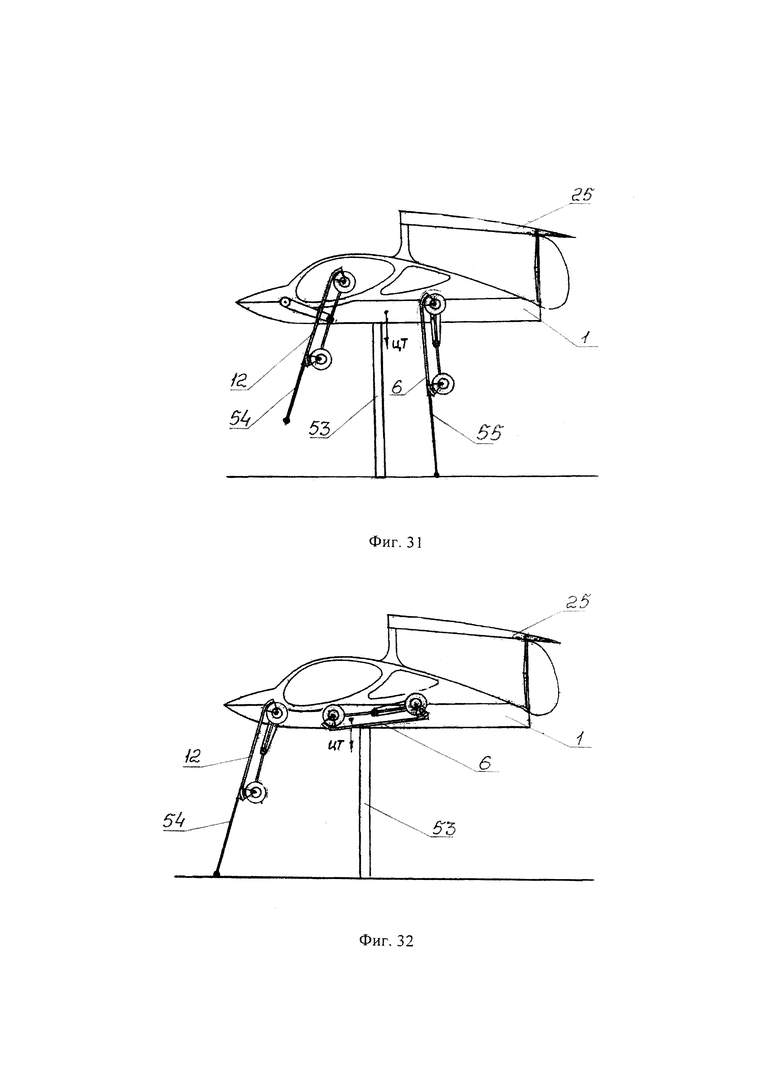
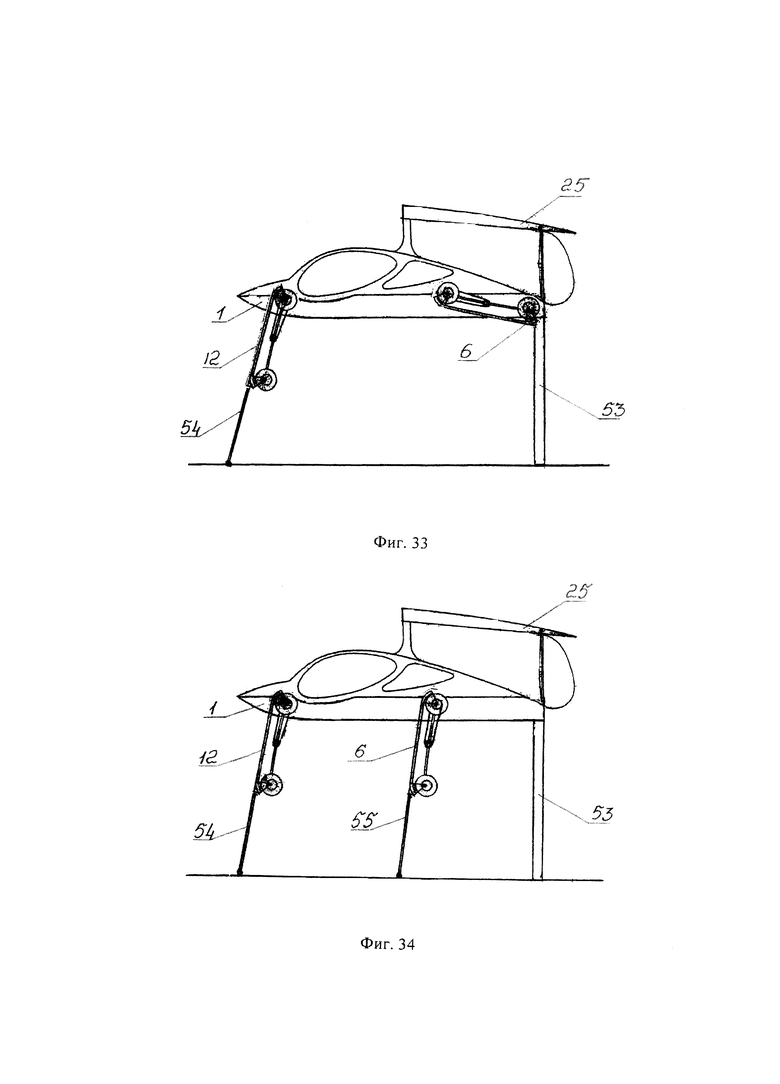
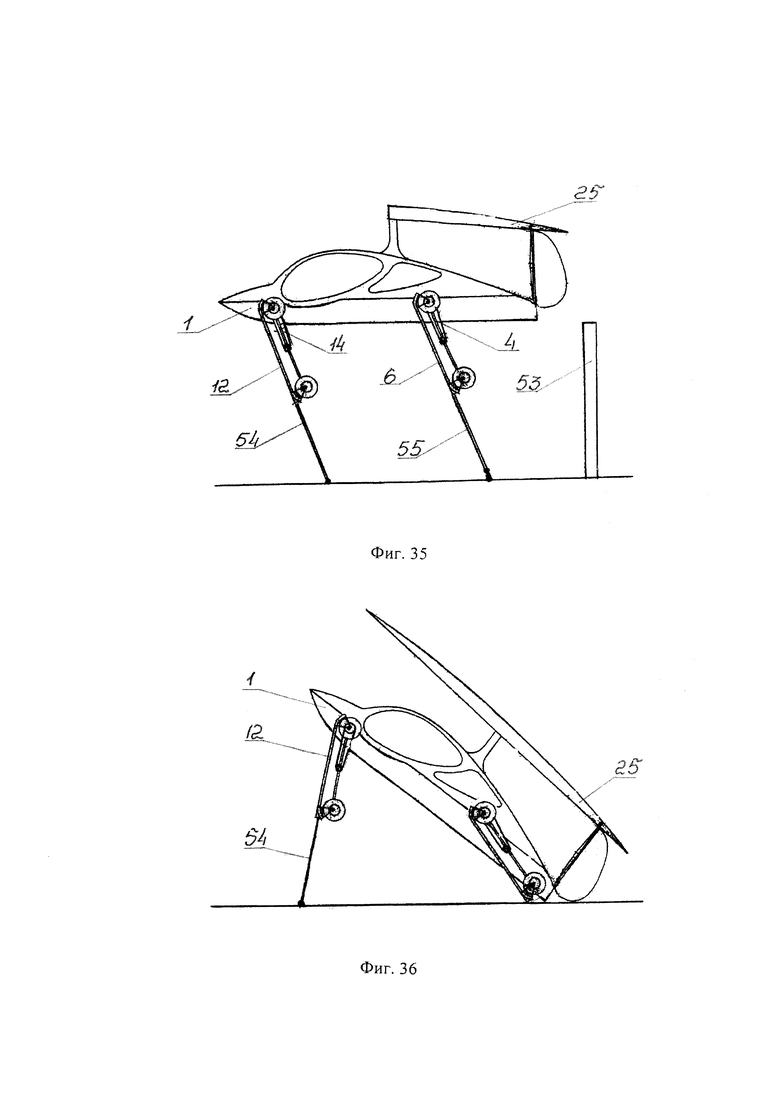
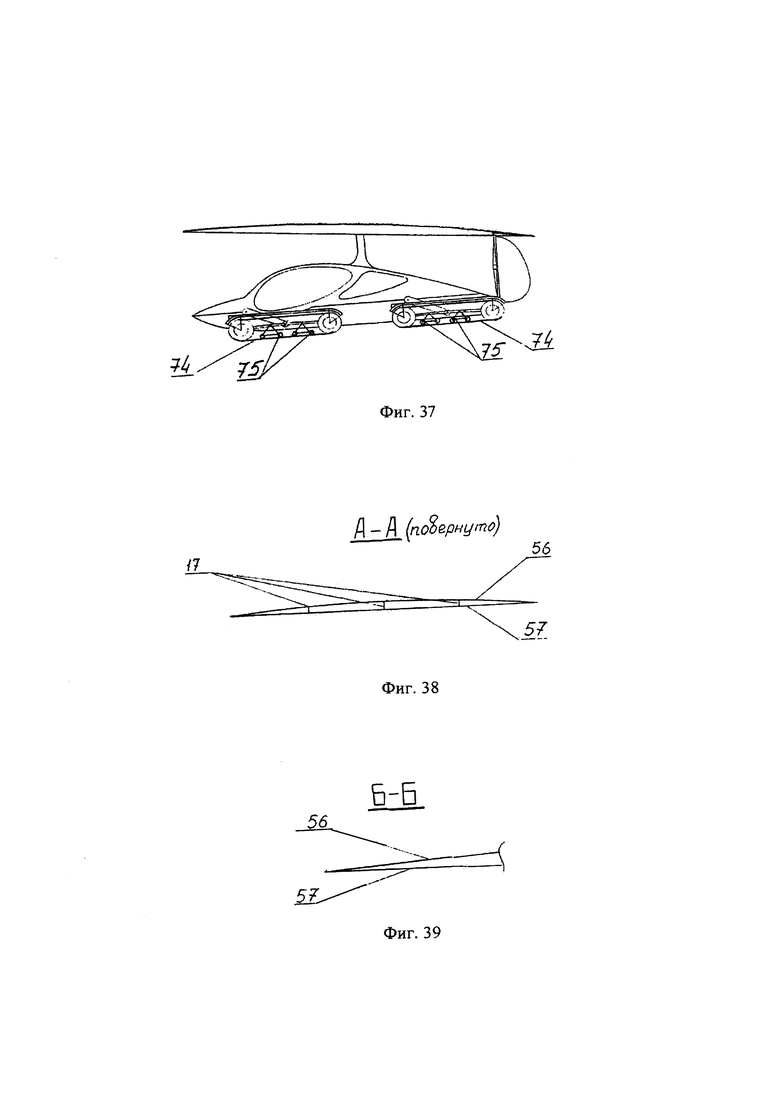
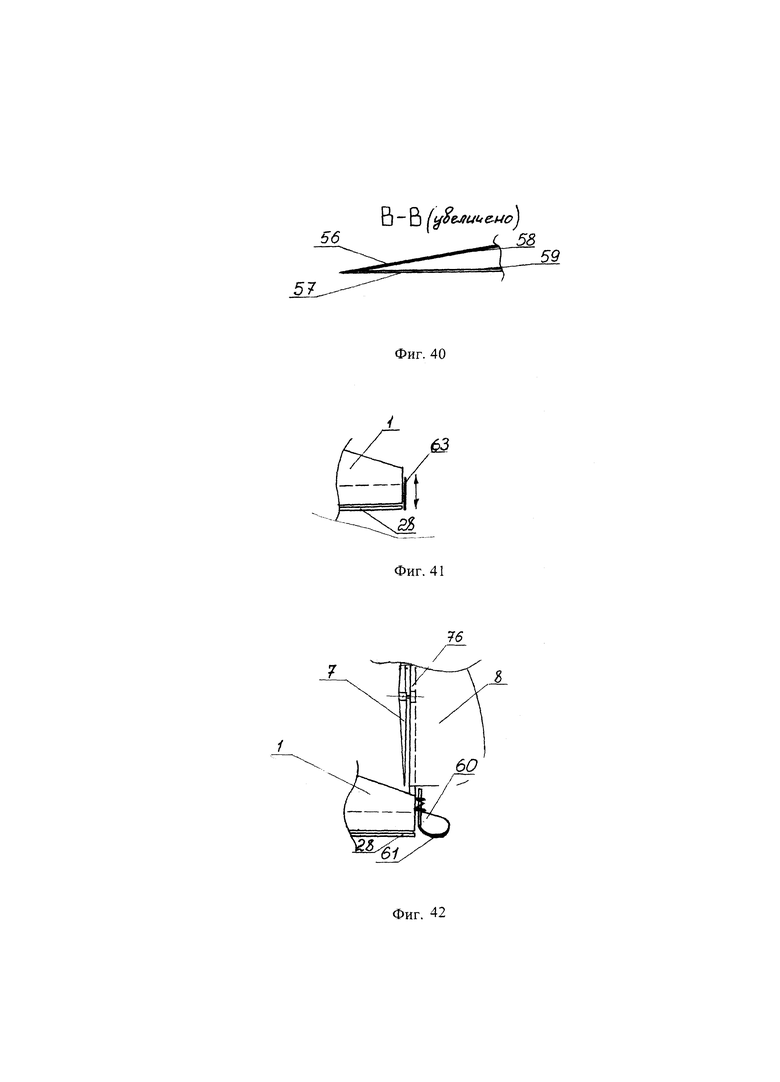
Изобретение относится к области машиностроения, в частности к транспортным средствам высокой проходимости. Транспортное средство включает корпус, ходовую часть и систему управления с пультом управления. Днище корпуса представляет собой глиссирующую поверхность. Днище снабжено четырьмя ребрами жесткости, двумя подвижными лыжами, четырьмя тормозными щитками. Ходовая часть расположена по обеим сторонам корпуса и содержит трансмиссию, четыре вращающихся рычага подвески, четыре вращающиеся ходовые рессоры, четыре колесные пары. Колеса соединены попарно и расположены симметрично относительно осей вращения вращающихся ходовых рессор. Каждая колесная пара снабжена лыжей с глиссирующей поверхностью. Внутри полости лыжи расположена штанга с механизмом выдвижения из внутренней полости и втягивания. Механизм состоит из мини электрического мотор-редуктора червячного типа и автономного источника питания. Трансмиссия выполнена с возможностью многоуровнего демпфирования силовых импульсов и включает в себя привод на каждую колесную пару. Привод состоит из червячной передачи, двигателя. Достигается повышение маневренности. 41 з.п.ф-лы, 42 ил.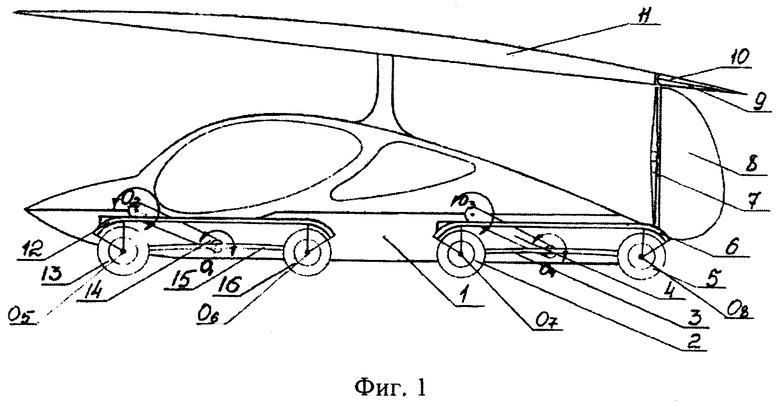
1. Транспортное средство высокой проходимости, включающее корпус, ходовую часть и систему управления с пультом управления, отличающееся тем, что днище корпуса представляет собой глиссирующую поверхность и снабжено четырьмя ребрами жесткости, расположенными вдоль днища корпус попарно по обеим сторонам днища корпуса, двумя подвижными лыжами, расположенными между ребер жесткости по всей длине днища, где каждая подвижная лыжа выполнена с глиссирующей поверхностью и снабжена мини рессорами или пружинами, установленными между днищем и подвижной лыжей, четырьмя тормозными щитками, при этом тормозные щитки закреплены на задних кромках ребер жесткости с возможностью торможения, ходовая часть расположена по обеим сторонам корпуса и содержит трансмиссию, четыре вращающихся рычага подвески, расположенные с возможностью вращения вокруг своих осей по часовой стрелке или против часовой стрелки, четыре вращающиеся ходовые рессоры, четыре колесные пары, при этом колеса соединены попарно и расположены симметрично относительно осей вращения вращающихся ходовых рессор, на концах которых расположены быстросъемные крепления для колесных пар, а сами ходовые рессоры закреплены на рычагах подвески с возможностью вращения вокруг своих осей по часовой стрелке или против часовой стрелки, каждая колесная пара снабжена лыжей с глиссирующей поверхностью, расположенной над колесной парой с возможностью перемещения ее из верхнего положения в нижнее положение и наоборот, восемь или шестнадцать бортовых рессор, где каждая бортовая рессора соединена с пневмо- или гидроцилиндром, каждая лыжа с глиссирующей поверхностью выполнена с внутренней полостью, внутри которой расположена штанга заданных размеров и формой с механизмом выдвижения из внутренней полости и втягивания, который состоит из мини электрического мотор-редуктора червячного типа и автономного источника питания, трансмиссия выполнена с возможностью многоуровнего демпфирования силовых импульсов, возникающих при преодолении неровностей и включает в себя привод на каждую колесную пару, привод на вращение каждой ходовой рессоры и привод на вращение каждого рычага подвески, при этом каждый привод состоит из червячной и/или цепной передачи, двигателя или электромотора, большой цилиндрический корпус червячного колеса червячной пары рычага подвески выполнен из бронзы и закреплен в корпусе с возможностью вращения, червячные валы выполнены с удлиненной средней червячной частью и с удлиненной шлицевой частью на обоих концах, корпуса сферических подшипников выполнены клинообразными, червячная пара выполнена с возможностью осуществления червячным валом вращения и продольных перемещений относительно своей оси, передаваемых через соответствующее червячное колесо, которое кинематически связано через звездочку и цепь с осью вращения ходовой рессоры, на концах которой симметрично относительно оси вращения закреплена колесная пара, одна червячная пара установлена с возможностью вращения рычага подвески вокруг своей оси, а другая червячная пара вращения ходовой рессоры неподвижна вместе с неподвижной звездочкой, зафиксированной на малом цилиндре не вращающегося червячного колеса и связанной через цепь со звездочкой, насаженной на стакан оси вращения ходовой рессоры, на концах которой закреплена колесная пара, при этом обе звездочки выполнены с одинаковым числом зубьев и неподвижная звездочка расположена с возможностью при вращении рычага подвески через цепь фиксировать звездочку, насаженную на стакан рычага подвески, которая занимает в пространстве одно и то же заданное положение, дополнительно снабжено автономной системой жизнеобеспечения, расположенной внутри корпуса, и представляет собой мини-пиролизную установку с возможностью получения электрической энергии на основе эффекта Пельтье.
2. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено быстросъемной полостью, огибающей верхнюю часть крыши корпуса и выполненной с возможностью подачи в нее до заданного давления сжатого воздуха и спуска сжатого воздуха из нее.
3. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено биконусным аэродинамическим крылом малого удлинения круглым в плане, расположенным и закрепленным в верхней части корпуса, выполненным с возможностью раскрытия или складывания веером в виде мягкой и/или жесткой сегментной оболочки, где в каждом сегменте оболочки расположен лонжерон, в котором один из концов нижней полки каждого лонжерона закреплен к одной из двух осей вращения под углом более 90 градусов, а один из концов верхней полки каждого лонжерона закреплен к оси вращения под заданным углом также более 90 градусов, противоположные концы полок лонжеронов сходятся по периметру крыла, которое снабжено сдвоенными элевонами, выполняющими функции рулей высоты и функции элеронов и сдвоенными рулями высоты, выполняющими при посадке функции тормозных щитков и/или закрылков, каждый сегмент раскрытого крыла жестко фиксируется в заданном положении с помощью механизма раскрытия крыла с дублирующей функцией по периметру, не позволяющей смещение сегментов относительно друг друга во время полета, оболочка в раскрытом положении в плане представляет собой круг, при этом биконусное аэродинамическое крыло малого удлинения выполнено с возможностью осуществления полета в режиме самолета, не срываясь в штопор, и с возможностью осуществления полета в режиме парашютирования.
4. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено двумя самолетными винтами изменяемого шага, расположенными на вертикальных стойках рулей направления, каждый из которых выполнен с возможностью создания толкающего момента при движении и осуществления взлетно-посадочных и полетных режимов.
5. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено четырьмя гусеницами, при этом каждая гусеница размещена на колесной паре и снабжена катками, закрепленными на соответствующей ходовой рессоре.
6. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено системой управления по направлению, состоящей из рулей, выполненных в виде лодочных рулей, рулей направления, выполненных в виде самолетных рулей направления.
7. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что силовая пластина рычага подвески соединена с большим цилиндрическим бронзовым корпусом червячного колеса с возможностью вращения по часовой стрелке или против часовой стрелки.
8. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что рычаг подвески установлен с возможностью синхронного и асинхронного вращения по отношению к заданным рычагам подвески электромотором, работающим от тяговых аккумуляторов через червячный вал и большой цилиндрический бронзовый корпус червячного колеса и снабжен дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем.
9. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что червячные валы вращения ходовых рессор снабжены автономными электроприводами с возможностью независимого синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем.
10. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что механизмы вращения колес снабжены автономными электроприводами с возможностью синхронного и асинхронного вращения и снабжены дублирующим приводом, соединенным через кардан, задний мост с дифференциалом, коробку передач с двигателем.
11. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая рессора закреплена на цилиндрическом стакане рычага подвески с возможностью вращения по часовой стрелке или против часовой стрелки.
12. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая рессора установлена с возможностью вращения электромотором, работающим от тяговых аккумуляторов через червячный вал, малый цилиндр червячного колеса с установленной на него звездочкой, и с возможностью передачи вращения через цепь на цилиндрический стакан рычага подвески с закрепленной к нему ходовой рессорой.
13. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что малый цилиндр одного червячного колеса установлен внутри большого бронзового цилиндра другого червячного колеса.
14. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что внутри малого цилиндра червячного колеса расположен вал привода ходовой части.
15. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что привод ходовой части расположен на рычаге подвески и имеет промежуточный вал.
16. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что привод вращения рычага подвески, привод вращения ходовой рессоры, привод вращения ходовой части расположены на рычаге подвески, и являются неотъемлемой частью рычага подвески, и представляют собой единый функционально связанный механизм.
17. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что рычаг подвески, ходовая рессора и валы привода ходовой части расположены с возможностью осуществления вращения независимо друг от друга по часовой стрелке или против часовой стрелки в заданной последовательности или синхронно.
18. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что верхний и нижний узлы рычага подвески выполнены с возможностью передачи трех видов вращения в заданную сторону и с заданной скоростью.
19. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что защита от грязи выполнена с функцией лыж с глиссирующими поверхностями.
20. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью осуществления смены колес на лыжи с глиссирующими поверхностями или с лыж с глиссирующими поверхностями на колеса в автоматическом режиме дистанционно за счет вращения рычагов подвески и вращения ходовых рессор вокруг своих осей вращения.
21. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью осуществления смены лыж с глиссирующими поверхностями на гусеницы или смены гусениц на лыжи с глиссирующими поверхностями в автоматическом режиме дистанционно за счет вращения рычагов подвески и вращения ходовых рессор вокруг своих осей вращения.
22. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью осуществления смены лыж с глиссирующими поверхностями или колес на подвижные лыжи и/или глиссирующее днище корпуса в автоматическом режиме дистанционно за счет поднятия ходовой части выше уровня днища за счет вращения рычагов подвески.
23. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что колеса попарно смонтированы с возможностью вращения на концах ходовых рессор и расположены симметрично относительно осей вращения ходовых рессор.
24. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех пар колес или четырех лыж с глиссирующими поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей.
25. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех гусениц или двух гусениц и двух лыж с глиссирующими поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей.
26. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор или при помощи четырех ходовых рессор с закрепленными на ходовых рессорах заданными опорными поверхностями, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей.
27. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью пошагового передвижения при помощи вращающихся рычагов подвески и четырех ходовых рессор с прикрепленными к ним бревнами, сохраняющих горизонтальное или заданное положение относительно поверхности и выполняющих функции опорных поверхностей.
28. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью передвижения на восьми колесах или на четырех колесах, смонтированных попарно, при этом четыре колеса или одно в положении приподняты.
29. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью передвижения при постоянном вращении ходовых рессор вокруг своих осей с закрепленными на них колесами и лыжами с глиссирующими поверхностями или гусеницами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, занимающих при этом заданное положение.
30. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ходовая часть выполнена с возможностью передвижения при постоянном вращении ходовых рессор вокруг своих осей со снятыми колесными парами и лыжами с глиссирующими поверхностями при не вращающихся рычагах подвески, но занимающих при этом заданное положение.
31. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что ребра жесткости установлены вдоль днища корпуса по два с каждой стороны днища корпуса с возможностью дополнительного обеспечения путевой устойчивости при движении по снежной или водной поверхности и разворотах транспортного средства.
32. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что на задних кромках ребер жесткости дополнительно расположены четыре тормозных щитка с возможностью их выдвижения.
33. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено умножителем напряжения, расположенным с возможностью подачи на наружный металлический контур высокого напряжения.
34. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено, по меньшей мере, одним дополнительным двигателем, по меньшей мере, одним дополнительным электрогенератором и механикой с возможностью продублировать функции электропривода.
35. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что дополнительно снабжено приспособлениями против скольжения или быстросъемными мини-колесами, предварительно установленными на концах выдвигаемых штанг с возможностью электропривода от автономного источника питания привода выдвигаемых штанг.
36. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что червячный вал выполнен с удлиненной средней червячной частью и с удлиненной шлицевой частью с обоих концов вала.
37. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что червячный вал установлен с возможностью продольных перемещений.
38. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что червячный вал с одной стороны или с обеих сторон закреплен с возможностью вращения с бортовой рессорой и через бортовую рессору с пневмо или гидроцилиндром.
39. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что червячный вал расположен с возможностью одновременного выполнения двух функций, передачи вращения на червячное колесо и передачи силовых импульсов, возникающих от неровностей при движении, на бортовую рессору и пневмо или гидроцилиндр для гашения, демпфирования этих импульсов.
40. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что бортовые рессоры совместно с пневмо или гидроцилиндрами расположены с возможностью возврата червячного вала в исходное положение, серединной частью червячного участка, совпадающей с вертикальной осью червячного колеса.
41. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что лыжи с глиссирующими поверхностями смонтированы с возможностью обеспечения дополнительной остойчивости при движении по водной поверхности.
42. Транспортное средство высокой проходимости по п. 1, отличающееся тем, что корпус выполнен аэродинамической формы.
| ПРЫГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2259298C2 |
| СПОСОБ ОБРАЗОВАНИЯ ВОЛН ДВИЖУЩИХ СИЛ В КОЛЕСНОМ ТРАНСПОРТНОМ СРЕДСТВЕ И УНИВЕРСАЛЬНЫЙ КОЛЕСНЫЙ ВЕЗДЕХОД, ЕГО РЕАЛИЗУЮЩИЙ | 2010 |
|
RU2425774C1 |
| Триггер | 1960 |
|
SU146773A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
