Изобретение относится к охранным системам сигнализации, способным надежно контролировать перемещение любых объектов в охранной зоне, а именно к вспомогательному оборудованию, применяемому при развертывании и установке на местности сейсмических зондов, точность установки которых определяет точность определения координат местонахождения нарушителя. Такие системы используются для контроля протяженных объектов, например, государственной границы.
В настоящее время для контроля перемещение любых объектов в охранной зоне используют системы, содержащие набор зондов, расположенных в контролируемой зоне, с группами сейсмических датчиков (геофонов). Каждая группа включает не менее трех геофонов, установленных друг относительно друга на строго заданных линейных и/или угловых координатах, при этом все геофоны группы соединены с общим блоком зонда, используемым для вычисления азимута подвижного объекта в собственной системе координат. В свою очередь зонды связаны по каналу связи с общим устройством обработки информации, который расположен на центральном посту охраны. Каждый зонд такой системы определяет направление на источник сейсмических колебаний поверхности грунта. В качестве направления, передаваемого зондом, указывается азимут на источник колебаний. При этом азимут отсчитывается относительно собственной системы координат зонда. Устройство обработки информации, получая несколько значений азимута от нескольких зондов, зная координаты этих зондов и зная ориентацию систем координат каждого зонда, определяет текущие координаты сейсмического объекта, вычисляя по «карте» точку пересечения лучей от зондов, указывающих на объект уже в глобальной (общей) системе координат.
Таким образом, точность вычисления координат движущегося объекта напрямую зависит от точности установки зондов по координатам и точности ориентации их собственных систем координат по азимуту.
Расстановка зондов по координатам решается просто. Их положение чаще всего привязывают к географическим координатам, используя электронные карты местности и, например, GPS навигаторы, ГЛОНАС или другие более старые системы привязки (например, триангуляция). С привязкой же собственной системы координат зонда по азимуту к глобальной системе координат ситуация гораздо сложнее.
Известно «устройство обнаружения проникновения человека через контур запрещенной зоны» (см. патент РФ №2209467, МКИ G08B 13/16, 2003 г.), которое использует группы зондов, каждый из которых включает в себя по три сейсмоприемника, которые установлены в вершинах равнобедренного прямоугольного треугольника, катет которого ориентирован вдоль рубежа и составляет 8-10 м. Устройство позволяет по величине и знаку отношения значения временной задержки между моментами регистрации сигнала сейсмоприемниками, расположенными по катету, ориентированному вдоль рубежа наблюдения, к значению временной задержки между моментами регистрации сигнала сейсмоприемниками, расположенными вдоль другого катета, ориентировочно определяют угол между направлением на цель и линией рубежа.
Известна «система сейсмического обнаружения и контроля перемещения подвижного объекта в охранной зоне» (см. патент РФ №101201, МКИ G01S 3/80, 2010 г.), содержащая группу зондов, расположенных в охранной зоне, при этом каждый зонд включает не менее трех геофонов, установленных относительно друг друга на строго заданных линейных и/или угловых координатах. В патенте также описан способ установки зондов на местности, для чего определяют по GPS навигатору или другому прибору, определяющему координаты с точностью порядка 1-3 метра. После этого размечается площадка для расстановки геофонов. Геофоны каждого зонда должны быть установлены на определенных расстояниях друг от друга. Такая задача просто решается на бумаге при помощи циркуля (в случае размещения геофонов по вершинам равностороннего треугольника) или при помощи циркуля линейки и калькулятора (в случае равнобедренного прямоугольного треугольника). На реальной почве с рулеткой и колышками гораздо сложнее правильно разметить площадку. Такие работы могут делаться при помощи теодолита и рулетки или при помощи только рулетки. Например, при трех геофонах в зонде сначала надо отложить один отрезок (сторону треугольника), затем из его концов провести две дуги нужной длины и найти место пересечения этих дуг (это можно сделать при помощи двух рулеток, закрепив их на концах отложенного ранее отрезка и найдя точку совпадения нужных длин двух других сторон треугольника). Время разметки таким способом составляет порядка 15-20 минут и требует участия как минимум трех человек. (При том что нормативное время установки одного зонда составляет 10 мин.) При использовании таких систем для охраны границы на каждый километр должно быть установлено порядка 20 зондов. При этом сама установка зондов займет всего чуть более 3 часов, а разметка положения геофонов зондов займет минимум 5 часов. К этим 8 часам необходимо добавить время на привязку собственных систем координат зондов к общей глобальной системе координат. Для привязки зондов по азимуту в соответствии с описанием патента №101201 должна быть проделана следующая работа. После установки всех зондов на местности в точку с известными координатами ставится контрольный источник вибрационных колебаний (генератор сейсмических волн). Это чаще всего электродвигатель, приводящий в движение груз при помощи кривошипно-шатунного механизма. Груз, перемещаясь вверх вниз, создает переменную нагрузку на почву и тем самым генерирует сейсмическую волну. Все зонды, которые находятся достаточно близко к генератору, определяют азимут на источник колебаний в собственной системе координат и передают его значение в устройство обработки информации. После этого контрольный источник вибрационных колебаний переставляется на другое место, чтобы его могли «услышать» другие зонды. Такая процедура повторяется до тех пор, пока все зонды не услышат генератор хотя бы по одному разу.
В указанном выше примере рассмотрен прямой участок границы, где на один километр приходится 20 зондов. Соответственно, генератор сейсмических волн должен быть поставлен по разу между каждыми двумя зондами. Соответственно, полное количество таких установок генератора сейсмических волн на одном километре составит 20 штук. После того как все зонды системы передадут значения измеренных азимутов, устройство обработки информации решает «обратную задачу» распространения волн. То есть по известным координатам зонда и источника сейсмических колебаний устройство обработки информации вычисляет правильный (реальный) азимут для каждого зонда и делает поправку к измеренному зондом азимуту, таким образом оно привяжет собственные системы координат зондов к глобальной системе координат по азимуту. Надо также учесть, что точность, с которой вычисляется эта поправка, не выше точности определения зондом азимута. Соответственно, при дальнейшей эксплуатации системы все измерения азимута на движущийся объект будут иметь по крайней мере еще и систематическую ошибку того же порядка, что и точность определения азимута. В некоторых случаях, когда объект находится вблизи прямой, соединяющей два соседних зонда, такие ошибки оказываются фатальными. Траектория движения объекта не сможет быть рассчитанной потому, что лучи, выстроенные от соседних зондов по измеренным азимутам, не дадут пересечения в пределах зоны обнаружения зондов. Если предположить, что азимуты и координаты зондов абсолютно точны, то положение объекта легко рассчитывается по всей зоне обнаружения, кроме случая, когда он находится на прямой, соединяющей оба зонда.
Рассмотрим следующий пример: на местности установлено два зонда, каждый из которых может указать азимут на источник сейсмических колебаний в глобальной системе координат. Для определенности предположим, что расстояние между зондами L=50 м и расположены они на горизонтальной оси плана местности. Пусть азимут одного зонда имеет систематическую ошибку Ω, связанную с неточностью привязки его собственной системы координат к глобальной системе. Понятно, что в этом случае появится на плане местности некоторая область, в которой лучи, проведенные от каждого зонда по измеренным ими азимутам, не пересекутся, то есть не будет найдено место расположения источника сейсмических колебаний. Понятно, что эта область расположена вдоль линии, соединяющей оба зонда, и имеет ширину порядка 2*L*Sin(Ω). Если ошибка Ω=5 градусов, то ширина зоны, в которой невозможно определение места расположения источника сейсмического шума, составит около 8,7 м или порядка 10% всей площади, которую охраняют эти два зонда. Если же оба зонда имеют такие или большие ошибки в привязке по азимуту собственных систем координат к глобальной системе, то работа по отслеживанию перемещений объекта станет бессмысленной.
Из приведенного примера понятно, что точность привязки зондов по углу должна быть порядка 1 градуса.
Рассмотрим другой пример: на местности установлен зонд, один из геофонов которого установлен с ошибкой и имеет отклонения от своего нормального положения L=5 см. При этом расстояние между геофонами £=5 м. Такая ошибка в установке приведет к ошибке ω в определении азимута на источник сейсмических колебаний. Величина ошибки ω зависит от самого азимута, но простые оценки показывают, что максимальная ошибка ω≈arcSin(L/£)=0,57 градуса. Таким образом, при точности в определении координат геофонов в собственной системе отсчета около 5 см привязка по азимуту с точностью 1 градус еще реальна.
Таким образом, становится понятна сложность и трудоемкость задачи установки зондов, особенно, если учесть то, что подобные системы охранной сигнализации зачастую используются в плоходоступных местах, куда затруднен проезд, а возможен доступ только пешком.
Задачей заявляемого технического решения является создание простого и надежного в практической реализации способа установки сейсмических зондов, в том числе и в труднодоступной местности, позволяющего не только существенно упростить процесс установки и привязки зондов к глобальной системе координат, но и сократить на порядок саму процедуру разметки мест установки геофонов.
Указанная задача в способе установки на местности сейсмического зонда, включающем установку не менее трех геофонов - датчиков сейсмических колебаний, расположенных друг относительно друга на строго заданных линейных и/или угловых координатах и соединенных с сейсмическим зондом, оборудованных блоком обработки сейсмической информации, решена тем, что установку геофонов производят в точках на местности, определяемых при помощи ориентированного по азимуту в глобальной системе координат трафарета.
Указанный способ позволяет сложную процедуру разметки и последующей привязки сейсмических зондов к глобальной системе координат заменить простой процедурой привязки по азимуту трафарета, который определяет на местности точки установки геофонов.
Для привязки трафарета по азимуту используется магнитный компас, при этом корректировка (поправка) азимута производится путем учета магнитного склонения в данной местности (http://www.outdoors.ru/orient/orient45.php).
Для упрощения привязки трафарета по азимуту может также использоваться солнечный компас (см. http://www.avsim.su/wiki/%D0%A1%D0%BE%D0%BB%D0%BD%D0%B5%D1%87%D0% BD%D1%8B%D0%B9_%D0%BA%D0%BE%D0%BC%D0%BF%D0%B0%D1%81) или гирокомпас (см. https://ru.wilkipedia.org/wiki/%D0%39%D0%B8%D1%80%D0%BE%D0%BA%D0%BE%D0%BC%D0%BF%D0%B0%D1%81).
Таким образом, заявляемое техническое решение позволяет существенно упростить трудоемкую и сложную процедуру установки, настройки и привязки к глобальной системе координат по азимуту зондов с тремя геофонами, установленными относительно друг друга на строго заданных линейных и/или угловых координатах, что не имеет аналогов среди используемых в настоящее время технологий установки сейсмических зондов на местности, а значит, удовлетворяет критерию «изобретательский уровень».
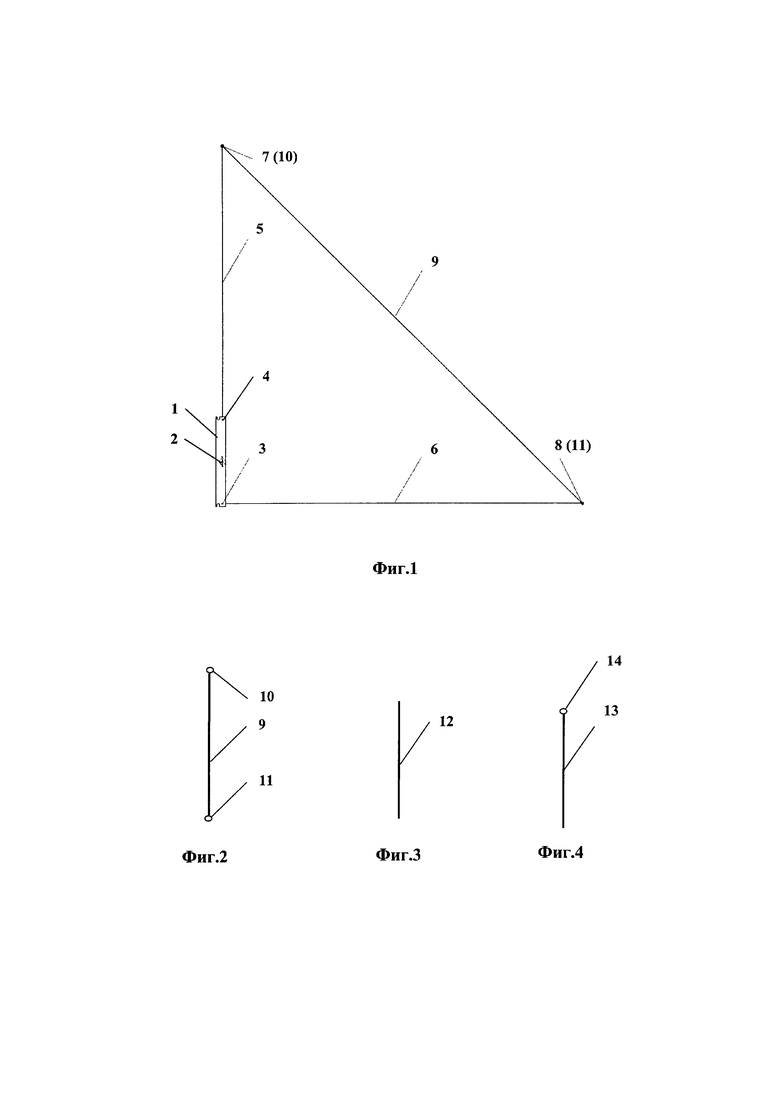
На фиг. 1 представлен рисунок одного из вариантов выполнения трафарета для установки трех геофонов в углах равнобедренного прямоугольного треугольника на расстояниях до 10 м и более между геофонами сейсмического зонда, содержащий: мотовило 1 с компасом 2, двумя отверстиями 3 и 4 для разметочных колышков и двумя прикрепленными к мотовилу тросиками 5 и 6 с кольцами на концах 7 и 8; тросик 9, тоже выполненный с двумя кольцами на концах 10 и 11.
На фиг. 2 представлен рисунок выполнения тросика 9 с двумя кольцами 10 и 11 на концах.
На фиг. 3 представлен рисунок выполнения колышков 12.
На фиг. 4 представлен рисунок выполнения колышка 13 с визирным прицелом 14 для фиксации тросика 5.
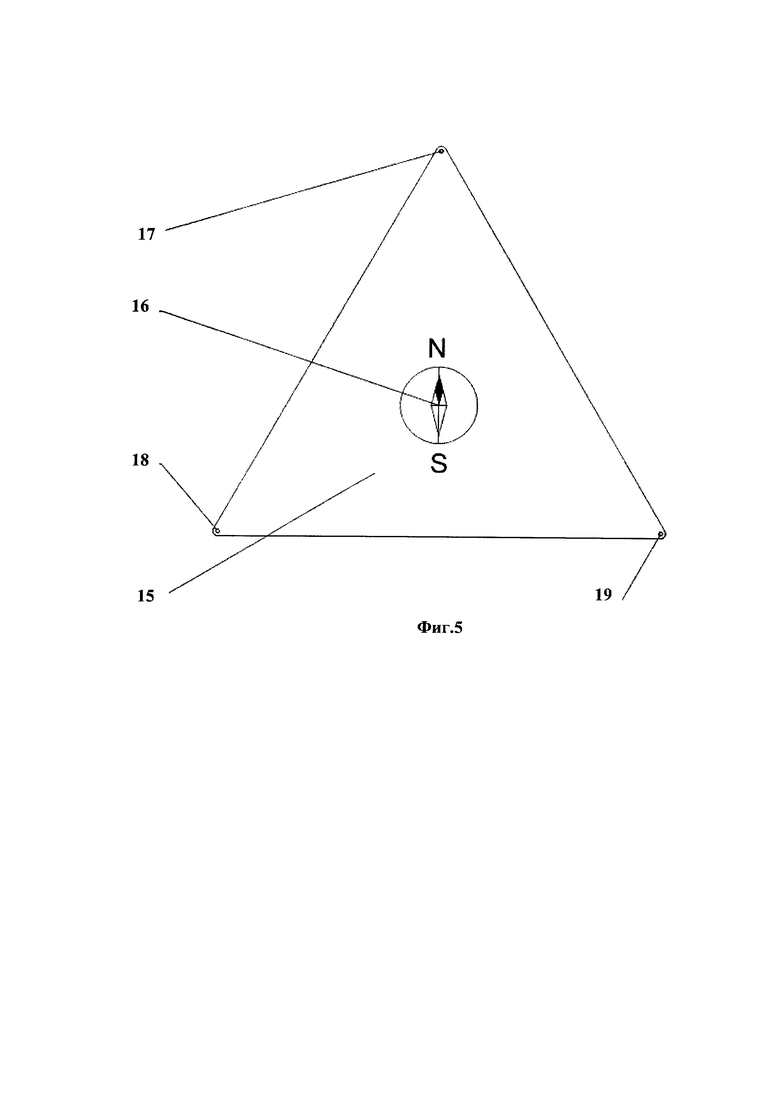
На фиг. 5 представлен рисунок одного из вариантов выполнения трафарета для установки трех геофонов в углах равностороннего треугольника, который целесообразно применять при расстояниях между геофонами 1-3 м, содержащий: пластину из толстого прорезиненного линолеума или пористой прорезиненной ткани 15 с закрепленным на ней компасом 16 и тремя отверстиями 17-19 для обозначения точек расположения геофонов на местности колышками 12.
Во всех вариантах трафаретов можно использовать другие виды компасов, например, солнечный или гироскопический.
Сначала рассмотрим принцип установки разметочных колышков 12 при помощи треугольного трафарета (фиг. 5), позволяющего устанавливать геофоны на расстоянии до 3 м друг от друга. (Трафарет приведенной конструкции для больших расстояний неудобен при транспортировке.) Для каждого установочного расстояния (1 м, 1.5 м, 2 м и др.) используется индивидуальный трафарет. Поэтому достаточно расстелить трафарет (фиг. 5) на земле, сориентировав его по компасу 16, а в отверстия 17-19 установить колышки 12. Поскольку трафарет был установлен так, что ось его совпадала с магнитным меридианом (положение которого определяется по компасу), то зонд оказывается привязанным к магнитному меридиану по азимуту. Теперь для того чтобы привязать зонд к географическому меридиану (к которому привязаны все современные карты), достаточно учесть магнитное склонение в месте расположения зонда (взять табличное значение или измерить при помощи солнечного компаса или гирокомпаса). Величина магнитного склонения заносится в программу, по которой проводится обработка сигналов от зондов и вычисляется место нахождения объекта, находящегося в охранной зоне на карте.
При необходимости установки геофонов зонда на расстоянии более 3 м друг от друга используем устройство, представленное на фиг. 1. Для этого сначала ориентируем по компасу 2 мотовило 1 относительно магнитного меридиана и закрепляем его двумя колышками 12 так, чтобы колышки были вертикальны и возвышались над травяным покровом. После этого вставляем колышек 13 (Фиг. 3) в отверстие 7 тросика 5 и в отверстие 10 тросика 9 и через визирное кольцо 14 по методу «трехточки» (центр визирного кольца 14 лежит на одной линии с колышками 12, установленными в отверстия 3 и 4 на мотовиле 1) ориентируем колышек 13, натянув при этом тросик 5. Далее натягиваем тросики 6 и 9 колышком 12, вставив его в кольца 8 и 11 и втыкаем его в землю. На этом разметка заканчивается. Указанную разметку геофонов способен проводить один оператор за 2-3 минуты. После проделывания такой процедуры перед установкой геофонов места их расположения окажутся размеченными с точностью до 2-3 см при расстоянии между геофонами порядка 10 м, при этом одна из сторон треугольника будет ориентирована по компасу. Размеры, форма и ориентация всех фигур, размеченных заявляемым способом при помощи одного трафарета, будут одинаковыми, а, следовательно, привязка всех зондов по азимуту к магнитному меридиану будет сделана автоматически. Далее все, как в предыдущем случае. Учет или измерение магнитного склонения, занесение его величины в программу обработки и вычисление места нахождения объекта в охранной зоне на карте.
В транспортном положении тросики 5, 6 и 9 наматываются на мотовило 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов | 2015 |
|
RU2608176C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| Способ отвода лесосек | 2017 |
|
RU2663280C1 |
| Способ установки морского полигона донных станций | 2023 |
|
RU2797702C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| СПОСОБ КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS (ВАРИАНТЫ) И ПОВЕРОЧНАЯ ИНКЛИНОМЕТРИЧЕСКАЯ УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS | 2010 |
|
RU2433262C1 |
Изобретение относится к охранным системам сигнализации, способным надежно контролировать перемещение любых объектов в охранной зоне, а именно к вспомогательному оборудованию, применяемому при развертывании и установке на местности сейсмических зондов, точность установки которых определяет точность определения координат местонахождения нарушителя. Такие системы используются для контроля протяженных объектов, например, государственной границы. Заявляется способ установки на местности сейсмического зонда, включающий установку не менее трех геофонов - датчиков сейсмических колебаний, расположенных друг относительно друга на строго заданных линейных и/или угловых координатах и соединенных с сейсмическим зондом, оборудованных блоком обработки сейсмической информации. Новым является то, что установку геофонов производят в точках на местности, определяемых при помощи ориентированного по азимуту в глобальной системе координат трафарета. Технический результат – повышение точности получаемых данных. 2 з.п. ф-лы, 5 ил.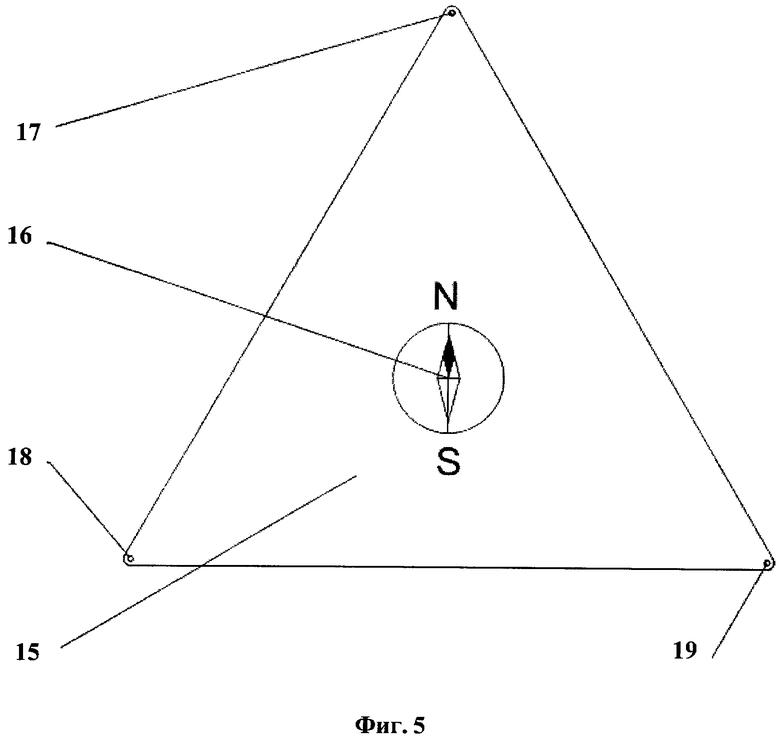
1. Способ установки на местности сейсмического зонда, включающий установку не менее трех геофонов - датчиков сейсмических колебаний, расположенных друг относительно друга на строго заданных линейных и/или угловых координатах и соединенных с сейсмическим зондом, оборудованных блоком обработки сейсмической информации, отличающийся тем, что установку геофонов производят в точках на местности, определяемых при помощи ориентированного по азимуту в глобальной системе координат трафарета.
2. Способ по п. 1, отличающийся тем, что в качестве привязки трафарета по азимуту используется магнитный компас, при этом корректировка (поправка) азимута производится путем учета магнитного склонения в данной местности.
3. Способ по п. 1, отличающийся тем, что в качестве привязки трафарета по азимуту используется солнечный компас.
| Способ получения летучих жирных кислот | 1954 |
|
SU101201A1 |

