Изобретение относится к разделу управления и может быть использовано для регулирования скорости электромеханического объекта, представляющего собой электродвигатель постоянного тока и упруго связанный с ним исполнительный механизм.
Известен «Электропривод постоянного тока с переменными параметрами механической части» (источник патент РФ №2070766, МПК Н02Р 5/06, год опубликования 1996), с упругой механической связью между двигателем и механизмом с переменным моментом инерции, содержащий последовательно соединенные задатчик частоты вращения, второй регулятор частоты вращения, регулятор упругого момента, первый регулятор частоты вращения, регулятор тока, систему формирования импульсов и тиристорный силовой блок, подключенный к электродвигателю, датчик тока, датчик частоты вращения электродвигателя и механизма, первый пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика тока, а выход с третьим входом регулятора тока, первый дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход с вторым входом регулятора тока, второй пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход с третьим входом первого регулятора частоты вращения, третий пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения механизма, а выход с третьим входом второго регулятора частоты вращения, пятый дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения механизма, а выход с вторым входом четвертого дифференцирующего блока, второй дифференцирующий, четвертый пропорционально-дифференцирующий, причем входы второго дифференцирующего и четвертого пропорционально-дифференцирующего блоков соединены с первым входом четвертого дифференцирующего блока, а выходы второго дифференцирующего, четвертого пропорционально-дифференцирующего и четвертого дифференцирующего блоков соединены соответственно с вторым входом первого регулятора частоты вращения, с третьим входом регулятора упругого момента и с вторым входом второго регулятора частоты вращения, третий дифференцирующий блок, выход которого соединен с вторым входом регулятора упругого момента, отличающийся тем, что в него введены датчик упругого момента и шестой дифференцирующий блок, первый и второй входы датчика упругого момента соединены с выходами соответственно датчика частоты вращения электродвигателя и датчика тока, а выход с входом второго дифференцирующего блока, выход шестого дифференцирующего блока соединен с первым входом третьего дифференцирующего блока, второй вход которого соединен с выходом датчика частоты вращения электродвигателя.
В качестве недостатка рассматриваемого устройства можно отметить следующее. Когда нагрузка на валу электродвигателя не превышает номинальной, устройство выполняет возложенные на него функции, но не обладает способностью токоограничения, что снижает его эксплуатационные возможности. Кроме этого при реализации требуется достаточно сложный датчик упругого момента.
Известна «Система автоматического регулирования частоты вращения исполнительного органа механизма, упругосвязанного с электродвигателем, одноконтурная астатическая второго порядка» (источник патент РФ №2249242, МПК G05B 11/01, Н02Р 5/06, год опубликования 2005), построенная по принципу суммирующего усилителя. Система содержит электродвигатель постоянного тока, упругосоединенный с исполнительным органом механизма, подключенный к выходу импульсного преобразователя, задатчик частоты вращения, выход которого соединен с входом фильтра, выход которого соединен с первым входом регулятора частоты вращения, выход которого соединен с блоком управления импульсным преобразователем, выход которого соединен с входом импульсного преобразователя, датчик частоты вращения электродвигателя. Кроме этого в систему автоматического регулирования введены дваждыпозиционный-дифференциально-дваждыдифференциальный блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход соединен со вторым входом регулятора частоты вращения, датчик тока, дваждыпозиционный-дваждыдифференциальный блок, вход которого соединен с выходом датчика тока, а выход соединен с третьим входом регулятора частоты вращения, датчик частоты вращения исполнительного органа механизма, выход которого соединен с четвертым входом регулятора частоты вращения, причем фильтр выполнен в виде позиционного блока второго порядка, регулятор частоты вращения выполнен в виде пропорционально-интегрально-дваждыинтегрального блока.
Недостаток устройства наиболее ярко проявляется в процессе регулирования нескольких параметров одновременно. В эти моменты устройство выполняет возложенные на него функции, однако, как и все системы, построенные с использованием суммирующего усилителя, может вызывать противоречивые изменения режима работы электропривода. Например, регулирование скорости действует в направлении увеличения жесткости механической характеристики, а система регулирования тока своим действием препятствует этому, смягчая механическую характеристику. Поэтому обычно одновременное действие обратных связей нежелательно или недопустимо, что особенно важно при наличии в устройстве-аналоге обратных связей по двум скоростям и току. Для исключения одновременного действия нескольких обратных связей в их контура необходимо ввести нелинейные элементы, отключающие данную связь при уровне регулируемой переменной, меньшем порогового напряжения нелинейного элемента. Наличие отсечек в цепях всех обратных связей при использовании такого решения приводит к тому, что задающий сигнал не определяет полностью заданного значения регулируемой переменной, поскольку основным фактором, задающим уровень каждой координаты, будет являться напряжение отсечки в цепи соответствующей обратной связи (см. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. М.: Энергия, 1979 г.).
В качестве прототипа выбран автоматизированный электропривод постоянного тока для управления объектом с упругими связями, выполненный по принципу систем подчиненного регулирования (см. Борцов Ю.А., Соколовский Г.Г. Автоматизтированный электропривод с упругими связями. - СПб.: Энергоатомиздат. Санкт-Петербург, отд-ние. 1992. Стр.70, рис.2.7.). Устройство содержит электродвигатель постоянного тока, упруго соединенный с исполнительным механизмом, через датчик тока подключенный к выходу силового преобразователя, управляющий вход которого соединен с выходом регулятора тока. Датчик скорости, установленный на валу электродвигателя постоянного тока, подключен к инвертирующему входу первого элемента сравнения, а на неинвертирующий вход первого элемента сравнения подключено напряжение, задающее частоту вращения исполнительного механизма. Вход регулятора тока подключен к выходу второго элемента сравнения, первый вход которого соединен с информационным выходом датчика тока, установленного в якорной цепи двигателя постоянного тока, а второй вход второго элемента сравнения через нелинейный элемент соединен с выходом регулятора скорости, на вход которого подключен выход первого элемента сравнения.
Устройство-прототип выполняет свои основные функции по поддержанию скорости вращения исполнительного механизма при воздействии как управляющих, так и возмущающих воздействий, но имеет ряд существенных недостатков. Во-первых, увеличение быстродействия замкнутой системы, построенной по принципу устройства-прототипа, ограничивают величины некомпенсируемых постоянных времени контуров тока и скорости. Во-вторых, для объектов с упругими кинематическими звеньями использование данного технического решения не позволяет обеспечить высокое качество управления.
Оценим быстродействие и качественные показатели переходных процессов, происходящих в устройстве-прототипе «в большом» при пуске и реверсе и «в малом» при отработке управляющего и возмущающего воздействий путем компьютерного моделирования.
Для определенности примем следующие значения параметров устройства-прототипа:
- KСП=22 коэффициент передачи силового преобразователя;
- ТСП=0.0033 с постоянная времени силового преобразователя;
- Ra=0,7 Ом активное сопротивление якорной цепи электродвигателя постоянного тока;
- Ta=0,1 с постоянная времени якорной цепи электродвигателя постоянного тока;
- La=0,07 Гн индуктивность якорной цепи электродвигателя постоянного тока;
- С=2,11 Вб конструктивная постоянная электродвигателя постоянного тока;
- ωн=100 рад/с номинальная скорость электродвигателя постоянного тока;
- Iн=13 А номинальный ток электродвигателя постоянного тока;
- J1=1 кг·м2 момент инерции ротора электродвигателя постоянного тока;
- J2=0,2 кг·м2 момент инерции исполнительного механизма;
- С12=10 Н·м/рад приведенный коэффициент жесткости кинематической передачи;
- KДТ=0.256 В/А коэффициент передачи датчика тока;
- KДС=0.05 В·с коэффициент передачи датчика скорости.
Синтез регуляторов тока и скорости, проведенный классическим методом подчиненного управления, позволяет выбрать в качестве регулятора тока ПИ-регулятор со следующей передаточной функцией:
где 
М1=1 - показатель колебательности (М1 принимается равным единице для получения нулевого перерегулирования);
T∑1=ТСП=0.0033 с - суммарная нескомпенсированная электрическая постоянная времени.
Проведя вычисления согласно приведенным математическим выражениям, получаем βТ=1.88.
Следуя тем же рекомендациям, в качестве регулятора скорости можно использовать пропорциональное звено с передаточной функцией:
где J∑=J1+J2 - суммарный момент инерции устройства;
а 2 - параметр, определяющий частотные свойства системы;
T∑2=Та+ТСП - суммарная постоянная времени устройства.
Величина а 2 определяется, исходя из частоты среза устройства ωС. С одной стороны
а с другой частота среза зависит от требуемого времени переходного процесса tПП следующим образом
где b - параметр, определяющий перерегулирование.
Принимая tПП=0,1 c, a b=1 для получения нулевого перерегулирования, получаем βС=76.2.
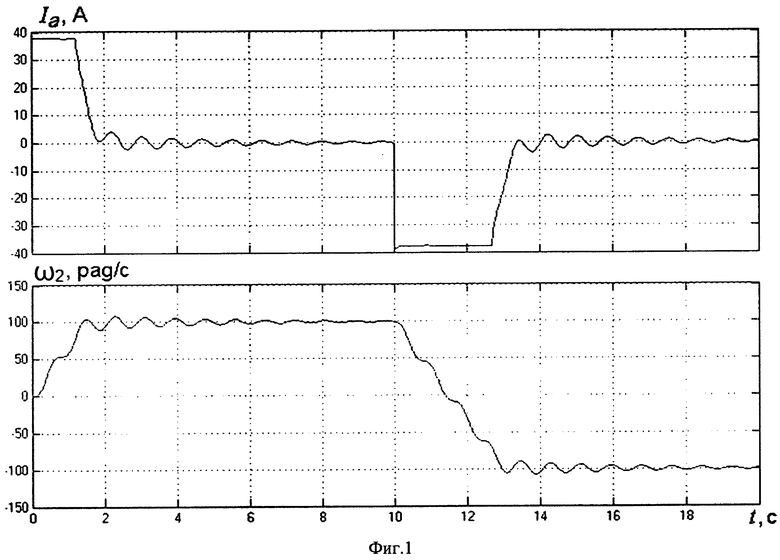
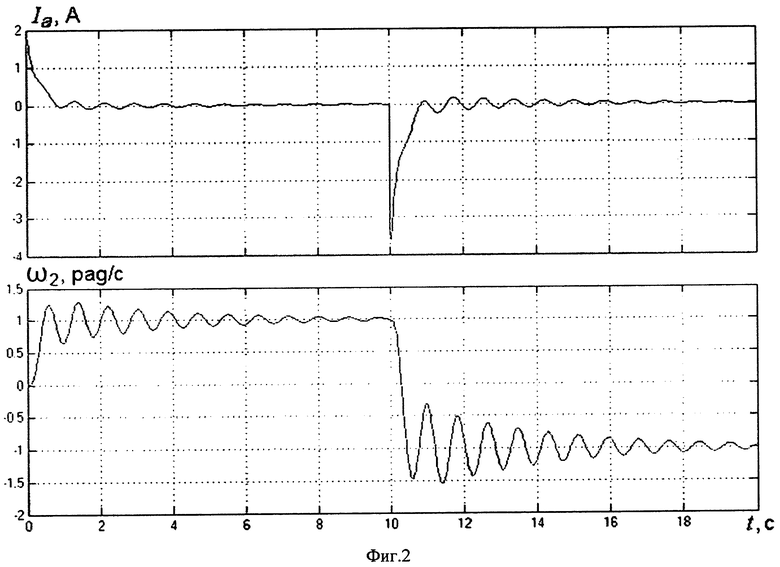
Результаты проведенного компьютерного моделирования рассматриваемого технического решения приведены на фиг.1 и фиг.2. Они представлены переходными процессами тока Ia якорной обмотки электродвигателя постоянного тока и скорости исполнительного механизма ω2 в режимах:
- пуска исследуемой электромеханической системы «в большом» на скорость, равную номинальной и при отсутствии момента на валу (от начала координат до t=10 снафиг.1);
- последующего реверса двигателя и исполнительного механизма «в большом» (в момент времени t=10 с на фиг.1);
- отработки управляющего воздействия «в малом» на увеличение скорости исполнительного механизма (от начала координат до t=10 с на фиг.2);
- отработки сигнала на реверс исполнительного механизма «в малом» (в момент времени t=10 с на фиг.2).
Для ограничения бросков тока в прямой контур математической модели был включен нелинейный элемент вида «насыщение», который ограничивал ток в обмотке якоря двигателя на уровне трех номинальных значений (39 А) при вращении вала как в прямом, так и в обратном направлении (после реверса).
Анализ полученных результатов указывает на то, что в режимах пуска и реверса (фиг.1) переходные процессы заканчиваются только через 10 с после поступления управляющих сигналов. Кроме этого оценка качества переходных процессов позволяет сделать вывод о том, что за время разгона и реверса исполнительный механизм испытывает значительные колебания скорости ω2. Поведение электропривода в случае возникновения необходимости регулирования «в малом» так же не лишено недостатков. Подача управляющего воздействия приводит к возникновению перерегулирований в скорости исполнительного механизма, заметных и при отработке системой воздействия в виде сигнала на реверс «в малом» (фиг.2). Все это значительно снижает точность и качество регулирования, увеличивает износ деталей механизмов, может привести к их поломке, отрицательно влияет на производительность и качество продукции. Приведенный анализ подтверждает, что использование подчиненного регулирования не позволяет обеспечить высокое качество управления для объектов с упругими кинематическими звеньями. Колебательность может быть снижена только при уменьшении быстродействия.
Технический результат предлагаемого изобретения заключается в увеличении быстродействия и улучшении качества процесса регулирования.
Такой результат достигается за счет того, что электрический привод постоянного тока для управления объектом с упругими связями, содержащий силовой преобразователь, через датчик тока соединенный с двигателем постоянного тока, который механически связан с первым датчиком скорости и через кинематическую вязкоупругую передачу с исполнительным механизмом, на валу которого размещен второй датчик скорости, первый и второй элементы сравнения, регулятор тока, нелинейный элемент и регулятор скорости, на неинвертирующий вход первого элемента сравнения подключено задающее напряжение, выход датчика тока соединен с первым входом второго элемента сравнения, выход первого элемента сравнения через регулятор скорости и нелинейный элемент подключен ко второму входу второго элемента сравнения, выход второго элемента сравнения через регулятор тока подключен к управляющему входу силового преобразователя, дополнительно имеет третий элемент сравнения, интегратор, в состав регулятора скорости введены элементы сравнения с четвертого по одиннадцатый и безынерционные звенья с первого по девятое, в состав регулятора тока введены двенадцатый элемент сравнения, а также десятое и одиннадцатое безынерционные звенья, при этом выход первого датчика скорости подключен к неинвертирующему входу третьего элемента сравнения, к инвертирующему входу которого присоединен выход второго датчика скорости, выход третьего элемента сравнения подключен ко входу интегратора, датчик тока соединен с инвертирующим входом первого элемента сравнения, выход первого элемента сравнения соединен со входом первого безынерционного звена, выход первого безынерционного звена соединен с первым входом четвертого элемента сравнения, второй вход которого подключен к датчику тока, выход четвертого элемента сравнения соединен со входом второго безынерционного звена, выход второго безынерционного звена подключен к неинвертирующему входу пятого элемента сравнения, инвертирующий вход которого соединен с выходом датчика тока, выход пятого элемента сравнения подключен ко входу третьего безынерционного звена, выход которого соединен с первым входом шестого элемента сравнения, второй вход шестого элемента сравнения соединен с выходом интегратора, выход шестого элемента сравнения через четвертое безынерционное звено подключен к неинвертирующему входу седьмого элемента сравнения, инвертирующий вход седьмого элемента сравнения соединен с выходом интегратора, а выход седьмого элемента сравнения через пятое безынерционное звено подключен к первому входу восьмого элемента сравнения, второй вход восьмого элемента сравнения соединен с выходом интегратора, а выход восьмого элемента сравнения подключен ко входу шестого безынерционного звена, выход шестого безынерционного звена подключен к первому входу девятого элемента сравнения, второй вход которого соединен с выходом первого датчика скорости, выход девятого элемента сравнения через седьмое безынерционное звено подключен к неинвертирующему входу десятого элемента сравнения, инвертирующий вход десятого элемента сравнения соединен с выходом первого датчика скорости, выход десятого элемента сравнения через восьмое безынерционное звено соединен с неинвертирующим входом одиннадцатого элемента сравнения, а инвертирующий вход одиннадцатого элемента сравнения соединен с выходом второго датчика скорости, выход одиннадцатого элемента сравнения соединен со входом девятого безынерционного звена, выход которого является выходом регулятора скорости, причем выход второго элемента сравнения через десятое безынерционное звено соединен с первым входом двенадцатого элемента сравнения, второй вход двенадцатого элемента сравнения подключен к выходу первого датчика скорости, а выход двенадцатого элемента сравнения соединен со входом одиннадцатого безынерционного звена, выход которого является выходом регулятора тока.
В последнее время активно исследуются возможности метода синтеза регуляторов, основанного на синергетических принципах (см. Бойчук Л.М. Метод структурного синтеза нелинейных систем автоматического управления. - М.: Энергия, 1971) и получившего свое развитие в методе аналитического конструирования агрегированных регуляторов (АКАР) (см. монографию: Современная прикладная теория управления: Новые классы регуляторов технических систем / Под ред. А.А. Колесникова. - Таганрог: Изд-во ТРТУ, 2000. Ч.3. 656 с.). Одной из особенностей метода является возможность синтеза регуляторов для любой из переменных состояния объекта управления. Это свойство может быть использовано для синтеза систем подчиненного регулирования, обладающих более широкими возможностями в обеспечении качества переходных процессов при управлении объектами с упругими кинематическими передачами.
Воспользуемся указанным методом для синтеза регуляторов тока и скорости объекта с упругими связями. Дифференциальные уравнения объекта управления в этом случае имеют вид
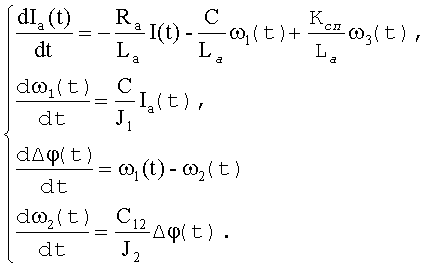
Кроме указанных выше переменных в состав системы уравнений входят величина Δφ(t), являющаяся зависимостью разности углов поворота валов электродвигателя постоянного тока и исполнительного механизма от времени, и ω3(t) - задающее значение скорости вращения исполнительного механизма.
Задание технологических инвариантов позволяет синтезировать регуляторы для любой из переменных состояния объекта. Таким образом, имеется возможность создать два независимых регулятора (тока и скорости).
Для синтеза регуляторов, выберем инвариантное многообразие ψi(t) следующего общего вида:
ψi(t)=xi(t)+ϕi(t)=0,
где xi(t) - управляемая координата, а ϕi(t) - функция, которая будет определять характер изменения переменной состояния согласно заданному инварианту.
Для регулятора, стабилизирующего ток электродвигателя (x1(t)=Ia(t)), необходимо задать:
ψ1(t)=Ia(t)-I3(t)=0,
где I3(t) - заданное значение тока.
Соответственно для стабилизации частоты вращения исполнительного механизма x2(t)=ω2(t):
ψ2(t)=ω2(t)-ω3(t)=0,
где ω3(t) - заданное значение скорости исполнительного механизма.
Решив основное функциональное уравнение метода АКАР вида

или

где Ti - параметры, определяющие темп переходных процессов замкнутой системы для каждой из переменных, получим следующие выражения для регуляторов тока и скорости рабочего органа:


где




Полученные выражения позволяют синтезировать регуляторы скорости и тока. При этом перенос коэффициентов обратных связей в прямой канал управления на основе правил эквивалентного преобразования структурных схем дает следующие формулы для расчета коэффициентов девяти последовательно соединенных безинерционных звеньев регулятора скорости:







Формулы для расчета коэффициентов двух последовательно соединенных безынерционных звеньев регулятора тока:
K11=C
Значения T1-T4 в указанных выше уравнениях определяются желаемым временем переходных процессов замкнутой системы.
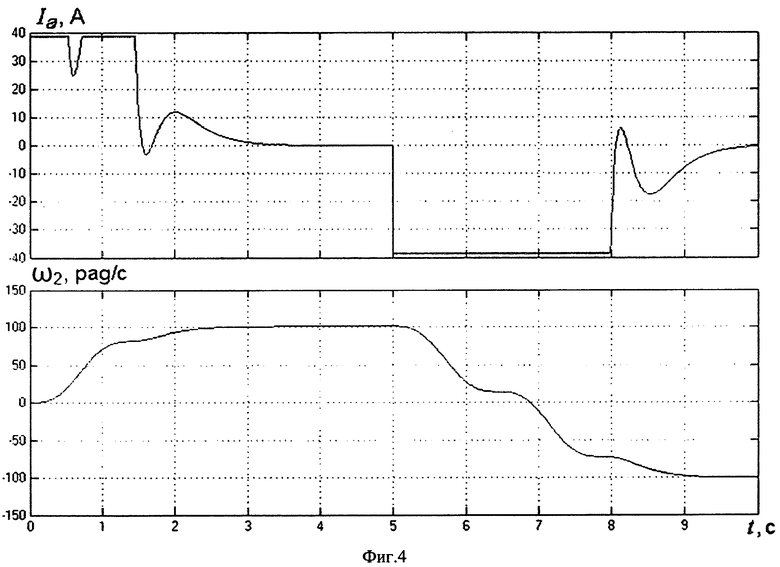
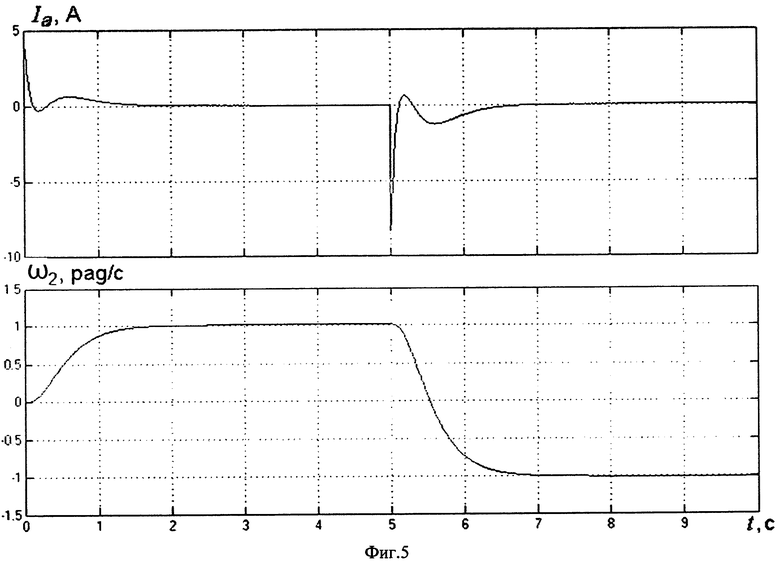
На фиг.3 изображена блок-схема электрического привода постоянного тока для управления объектом с упругими связями, на фиг.4 и фиг.5 приведены результаты компьютерного моделирования работы заявляемого устройства.
Для фиг.3 введены следующие обозначения: 1 - силовой преобразователь, который формирует напряжение U, через датчик тока 2 поступающее на якорную обмотку электродвигателя постоянного тока 3 независимого возбуждения. Датчик тока 2 вырабатывает на своем выходе напряжение U1, пропорциональное току якоря электродвигателя постоянного тока 3. Электродвигатель постоянного тока 3 механически связан с первым датчиком скорости 4 и через кинематическую вязкоупругую передачу 5 - с исполнительным механизмом 6. Исполнительный механизм 6 оснащен вторым датчиком скорости 7. Величина скорости вращения вала электродвигателя постоянного тока 3 обозначена на фиг.3 как ω1, измеряется первым датчиком скорости 4 и преобразуется им в напряжение Uω1, пропорциональное скорости вращения электродвигателя постоянного тока 3. Величина скорости вращения вала исполнительного механизма 6 обозначена на фиг.2 как ω2, измеряется вторым датчиком скорости 7 и преобразуется им в напряжение Uω2, пропорциональное скорости вращения вала исполнительного механизма 6. В свою очередь датчик тока 2 соединен с инвертирующим входом первого элемента сравнения 8, к неинвертирующему входу которого подключено задающее напряжение Uз, устанавливающее требуемое значение скорости ω2 исполнительного механизма 6. Кроме этого с выхода датчика тока 2 напряжение, пропорциональное току якоря Ia электродвигателя постоянного тока 3, поступает на первый вход второго элемента сравнения 9. С выхода первого датчика скорости 4 напряжение Uω1 поступает на неинвертирующий вход третьего элемента сравнения 10, инвертирующий вход которого соединен с выходом второго датчика скорости 7. Тем самым на выходе третьего элемента сравнения 10 образуется напряжение, пропорциональное разности напряжений Uω1-Uω2, поступающее на вход интегратора 11. На выходе интегратора 11 получаем напряжение, соответствующее Δφ - разности углов поворота валов электродвигателя постоянного тока 3 и исполнительного механизма 6. На выходе первого элемента сравнения 8 образуется разность напряжений U3-U1, которая поступает на вход первого безынерционного звена 12, обладающего коэффициентом передачи K1. В свою очередь выход первого безынерционного звена 12 соединен с первым входом четвертого элемента сравнения 13, второй вход которого подключен к датчику тока 2. Выход четвертого элемента сравнения 13 соединен со входом второго безынерционного звена 14, имеющего коэффициент передачи K2. Выход второго безынерционного звена 14 подключен к неинвертирующему входу пятого элемента сравнения 15, инвертирующий вход которого соединен с выходом датчика тока 2. Выход пятого элемента сравнения 15 подключен ко входу третьего безынерционного звена 16, выход которого соединен с первым входом шестого элемента сравнения 17. Третье безынерционное звено 16 обладает коэффициентом передачи K3. Второй вход шестого элемента сравнения 17 соединен с выходом интегратора 11, на котором вырабатывается значение Δφ. Выход шестого элемента сравнения 17 через четвертое безынерционное звено 18 с коэффициентом передачи K4 подключен к неинвертирующему входу седьмого элемента сравнения 19. Инвертирующий вход седьмого элемента сравнения 19 соединен с выходом интегратора 11, а выход седьмого элемента сравнения 19 через пятое безынерционное звено 20 с коэффициентом передачи K5 подключен к первому входу восьмого элемента сравнения 21. Второй вход восьмого элемента сравнения 21 соединен с выходом интегратора 11. Выход восьмого элемента сравнения 21 подключен ко входу шестого безынерционного звена 22 с коэффициентом передачи K6. Выход шестого безынерционного звена 22 подключен к первому входу девятого элемента сравнения 23, второй вход которого соединен с выходом первого датчика скорости 4, а выход через седьмое безынерционное звено 24 (его коэффициент передачи K7) подключен к неинвертирующему входу десятого элемента сравнения 25. В свою очередь инвертирующий вход десятого элемента сравнения 25 соединен с выходом первого датчика скорости 4. Выход десятого элемента сравнения 25 через восьмое безынерционное звено 26, коэффициент передачи которого K8, соединен с неинвертирующим входом одиннадцатого элемента сравнения 27, а инвертирующий вход одиннадцатого элемента сравнения 27 соединен с выходом второго датчика скорости 7. Выход одиннадцатого элемента сравнения 27 соединен со входом девятого безынерционного звена 28, обладающего коэффициентом передачи K9. Элементы 12-28 образуют регулятор скорости 29, синтез передаточной характеристики которого был проведен выше. На фиг.3 напряжение, формируемое регулятором скорости 29, обозначено как UPC. Ограничение координат в системе подчиненного регулирования, построенной по принципам АКАР, осуществляется аналогично классическим системам подчиненного регулирования. Поэтому для предотвращения бросков тока в системе выход девятого безынерционного звена 28, а значит, и регулятора скорости 29, подключен к нелинейному элементу 30, обладающему характеристикой типа «насыщение». Нелинейный элемент 30 подключен к первому входу второго элемента сравнения 9, второй вход которого подключен к выходу датчика тока 2. Выход второго элемента сравнения 9 через десятое безынерционное звено 31 с коэффициентом передачи K10 соединен с первым входом двенадцатого элемента сравнения 32. Второй вход двенадцатого элемента сравнения 32 подключен к выходу первого датчика скорости 4, а выход двенадцатого элемента сравнения 32 через одиннадцатое безынерционное звено 33 с коэффициентом передачи K11 соединен с управляющим входом силового преобразователя 1 (напряжение UУ на фиг.3), на силовой вход которого подключено напряжение сети UC. Элементы 31-33 реализуют синтезированный выше регулятор тока 34.
Электрический привод постоянного тока для управления объектом с упругими связями работает следующим образом. В начальный момент пуска электропривода включают напряжение сети UC, подающееся на силовой вход силового преобразователя 1. На неинвертирующий вход первого элемента сравнения 8 подают задающее напряжение Uз, величина которого определяет скорость вращения ω2 исполнительного механизма 6. При этом скорость вращения ω1 электродвигателя постоянного тока 3 и скорость вращения ω2 исполнительного механизма 6 начинают возрастать с нуля. Первый датчик скорости 4 и второй датчик скорости 7 в начальный момент вырабатывают на своих выходах напряжения Uω1=Uω2=0. Третий элемент сравнения 10, получающий на инвертирующем и неинвертирующем входах сигналы, равные по величине, обеспечивает отсутствие напряжения на входе интегратора 11 и, как следствие, нулевое значение величины Δφ на выходе интегратора 11. Поскольку ток Ia электродвигателя постоянного тока 3 в начальный момент времени также нулевой, напряжение U1, снимаемое с информационного выхода датчика тока 2 равно нулю. Следовательно, в начальный момент времени регулятор скорости 29 получает только одно управляющее воздействие (задающее напряжение Uз) при нулевых значения сигналов обратных связей. На инвертирующий вход первого элемента сравнения 8, второй вход четвертого элемента сравнения 13, инвертирующий вход пятого элемента сравнения 15, второй вход шестого элемента сравнения 17, инвертирующий вход седьмого элемента сравнения 19, второй вход восьмого элемента сравнения 21, второй вход девятого элемента сравнения 23, инвертирующий вход десятого элемента сравнения 25, инвертирующий вход одиннадцатого элемента сравнения 27 поступают нулевые напряжения. Это приводит к появлению на выходе первого элемента сравнения 8 разности единственного задающего напряжения Uз и нулевого напряжения U1, снимаемого с информационного выхода датчика тока 2. Возникшую разность напряжений последовательно обрабатывают первое безынерционное звено 12, второе безынерционное звено 14, третье безынерционное звено 16, четвертое безынерционное звено 18, пятое безынерционное звено 20, шестое безынерционное звено 22, седьмое безынерционное звено 24, восьмое безынерционное звено 26 и девятое безынерционное звено 28. Тем самым на выходе девятого безынерционного звена 28, а значит, и на выходе регулятора скорости 29 появляется напряжение UPC, поступающее на вход нелинейного элемента 30. Если напряжение регулятора скорости UPC не превышает порогового значения, определяемого характеристикой нелинейного элемента 30, то оно без изменений поступает на первый вход второго элемента сравнения 9. Если же это напряжение превысит порог (в нашем случае соответствующий трехкратному номинальному току якорной обмотки электродвигателя постоянного тока 3), дальнейшего увеличения выходного напряжения нелинейного элемента 30 не происходит. Тем самым электродвигатель постоянного тока 3 защищается от чрезмерных токов в цепи якоря. На второй вход второго элемента сравнения 9 поступает сигнал от датчика тока 2. Этот сигнал в начальный момент времени нулевой. Выходное напряжение второго элемента сравнения 9 обрабатывается десятым безынерционным звеном 31 и поступает на первый вход двенадцатого элемента сравнения 32. Поскольку электродвигатель постоянного тока 3 в начальный момент времени не вращается, сигнал с первого датчика скорости 4, поступающий на второй вход двенадцатого элемента сравнения 32 нулевой, и на вход одиннадцатого безынерционного звена 33 поступает напряжение, обрабатываемое этим звеном с коэффициентом передачи K11. После обработки одиннадцатым безынерционным звеном 33 напряжение регулятора тока 34 подается на управляющий вход силового преобразователя 1. Наличие напряжения сети UC на силовом входе и управляющего напряжения UУ на входе управления силового преобразователя 1 приводит к появлению на выходе силового преобразователя 1 напряжения U. Под действием этого напряжения электродвигатель постоянного тока 3 начинает вращаться. Появляется ток в якорной цепи электродвигателя постоянного тока 3, что приводит к возникновению напряжения U1 на выходе датчика тока 2. Напряжение U1 появляется на входах всех соединенных с датчиком тока 2 элементов сравнения. Вместе с электродвигателем постоянного тока 3 через кинематическую вязкоупругую передачу 5 начинает вращаться и исполнительный механизм 6. В процессе разгона из-за вязкоупругих свойств кинематической передачи 5 мгновенные значения скорости вращения вала электродвигателя постоянного тока 3 (ω1) и исполнительного механизма 6 (ω2) могут отличаться друг от друга. Появляющиеся напряжения с первого датчика скорости 4 и второго датчика скорости 7 (Uω1 и Uω2 соответственно) поступают на входы всех соединенных с ними элементов. На выходе третьего элемента сравнения 10 появляется разность напряжений Uω1-Uω2, которая после интегрирования интегратором 11 формирует напряжение, соответствующее Δφ - разности углов положений валов электродвигателя постоянного тока 3 и исполнительного механизма 6. Это напряжение появляется на входах всех соединенных с интегратором 11 элементов. По мере увеличения скорости электродвигателя постоянного тока 3 скорость его вращения ω1 увеличивается, ток якорной обмотки, продержавшись на заданном уровне, определяемом уставкой нелинейного элемента 30, падает. Исполнительный механизм 6 разгоняется. При этом все перерегулирования переходного процесса отрабатываются элементами сравнения и безынерционными звеньями синтезированной системы управления. Установившееся значение регулируемого параметра (в данном случае скорости вращения исполнительного механизма 6 ω2) наступает при достижении напряжениями обратных связей регулятора тока 34 и регулятора скорости 29 заданных величиной Uз величин. Для иллюстрации принципа работы устройства проведено математическое моделирование заявляемого технического решения, результаты которого приведены на фиг.4 и фиг.5. На фиг.4 представлены переходные процессы тока Ia якорной обмотки электродвигателя постоянного тока 3 и скорости вращения исполнительного механизма 6 ω2 «в большом» при пуске и реверсе электрического привода. На фиг.5 размещены графики тех же параметров электропривода «в малом» при отработке управляющих воздействий. При моделировании сохранены все параметры элементов электропривода, использованные при моделировании прототипа. Для подсчета коэффициентов передачи K1-K11 безынерционных звеньев с первого по одиннадцатый с целью получения высоких показателей быстродействия выбраны следующие величины T1-Т4:T1=0,01 с, Т2=0,01 с, T3=0,02 с, T4=0,02 с.
На временном интервале от t=0 до t=5 с фиг.4 иллюстрирует работу устройства «в большом» в режиме пуска на номинальную скорость при отсутствии момента статического сопротивления. В этом режиме устройство функционирует значительно стабильнее и быстрее, чем прототип. Так, отсутствует превышение скоростью ω2 заданного значения в 100 рад./с, нарастание скорости исполнительного механизма 6 происходит плавно. Колебания тока в якорной цепи незначительны. Нелинейное звено 30, выполняющее роль токоограничения на уровне 39 А, не дает току якорной обмотки электродвигателя 3 превысить заданный порог. Переходный процесс пуска заканчивается через 3 секунды после поступления команды на разгон электропривода, что в 2-3 раза быстрее, чем в устройстве-прототипе. Процесс реверса, который на временных диаграммах тока и скорости вращения исполнительного механизма начинается с отметки в 5 с, происходит без колебаний скорости ω2 и заканчивается через 4 с после поступления команды на реверс. Это, как видно из сравнения временных диаграмм фиг.1 и фиг.4, в 2 раза быстрее, чем в прототипе. Как и в случае пуска, ток ограничивается нелинейным элементом 30 на уровне 39 А. Колебания тока якорной цепи незначительны. Приведенные на фиг.5 временные диаграммы скорости ω2 и тока якоря Ia электродвигателя постоянного тока 3 указывают на поведение электропривода в случае отработки им управляющих воздействий на увеличение скорости ω2 (временной интервал от 0 до 5 с) и на реверс «в малом» (интервал от 5 с до 10 с). Так, плавное увеличение скорости вращения исполнительного механизма 6 в режиме отработки электроприводом управляющего сигнала на разгон (интервал 0-5 с) по сравнению с устройством-прототипом (фиг.2) происходит без резких колебаний и заканчивается через 2 с после поступления команды. Это в 5 раз быстрее прототипа. Отработка электроприводом управляющего сигнала на реверс «в малом» происходит, начиная с пятой секунды и заканчивается через 2 с после поступления управляющего сигнала. Сравнение с фиг.2 указывает на увеличение быстродействия в заявляемом варианте при значительном улучшении характера протекания переходного процесса, что выражается в отсутствии перерегулирований на временной диаграмме скорости ω2.
Таким образом, использование синтезированных регуляторов скорости и тока в составе электропривода позволяет обеспечить высокое быстродействие и качество переходных процессов. Все это снижает износ деталей механизмов, минимизирует вероятность их поломки, положительно влияет на производительность и качество продукции. При этом регуляторы позволяют аналогично классическим каскадным регуляторам проводить раздельную настройку контуров тока и скорости, осуществлять ограничение тока электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2017 |
|
RU2659370C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
Изобретение относится к разделу управления и может быть использовано для регулирования скорости электромеханического объекта, представляющего собой электродвигатель постоянного тока и упругосвязанный с ним исполнительный механизм. Технический результат заключается в увеличении быстродействия и улучшении качества регулирования. Для этого заявленное устройство содержит силовой преобразователь, датчик тока, соединенный с двигателем постоянного тока, первый датчик скорости, кинематическую вязкоупругую передачу, исполнительный механизм, второй датчик скорости, нелинейный элемент, регулятор скорости и регулятор тока. Кроме этого в состав электрического привода введены интегратор, элементы сравнения с третьего по двенадцатый и безынерционные звенья с первого по одиннадцатое. 5 ил.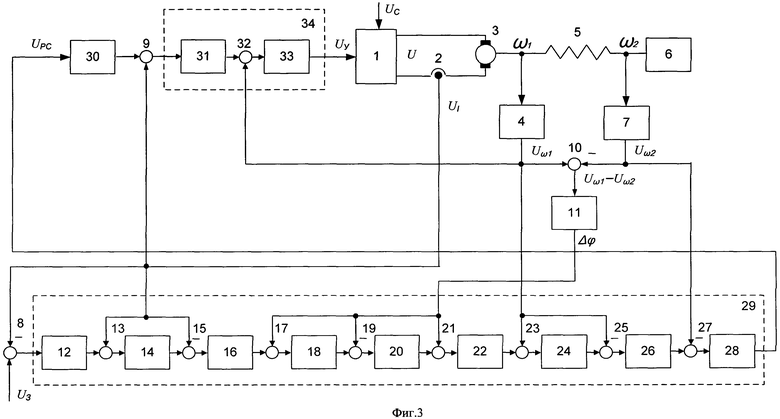
Электрический привод постоянного тока для управления объектом с упругими связями, содержащий силовой преобразователь, через датчик тока соединенный с двигателем постоянного тока, который механически связан с первым датчиком скорости и через кинематическую вязкоупругую передачу с исполнительным механизмом, на валу которого размещен второй датчик скорости, первый и второй элементы сравнения, регулятор тока, нелинейный элемент и регулятор скорости, на неинвертирующий вход первого элемента сравнения подключено задающее напряжение, выход датчика тока соединен с первым входом второго элемента сравнения, выход первого элемента сравнения через регулятор скорости и нелинейный элемент подключен ко второму входу второго элемента сравнения, выход второго элемента сравнения через регулятор тока подключен к управляющему входу силового преобразователя, отличающийся тем, что в него введен третий элемент сравнения, интегратор, в состав регулятора скорости введены элементы сравнения с четвертого по одиннадцатый и безинерционные звенья с первого по девятое, в состав регулятора тока введены двенадцатый элемент сравнения, а также десятое и одиннадцатое безинерционные звенья, при этом выход первого датчика скорости подключен к неинвертирующему входу третьего элемента сравнения, к инвертирующему входу которого присоединен выход второго датчика скорости, выход третьего элемента сравнения подключен ко входу интегратора, датчик тока соединен с инвертирующим входом первого элемента сравнения, выход первого элемента сравнения соединен со входом первого безинерционного звена, выход первого безинерционного звена соединен с первым входом четвертого элемента сравнения, второй вход которого подключен к датчику тока, выход четвертого элемента сравнения соединен со входом второго безинерционного звена, выход второго безинерционного звена подключен к неинвертирующему входу пятого элемента сравнения, инвертирующий вход которого соединен с выходом датчика тока, выход пятого элемента сравнения подключен ко входу третьего безинерционного звена, выход которого соединен с первым входом шестого элемента сравнения, второй вход шестого элемента сравнения соединен с выходом интегратора, выход шестого элемента сравнения через четвертое безинерционное звено подключен к неинвертирующему входу седьмого элемента сравнения, инвертирующий вход седьмого элемента сравнения соединен с выходом интегратора, а выход седьмого элемента сравнения через пятое безинерционное звено подключен к первому входу восьмого элемента сравнения, второй вход восьмого элемента сравнения соединен с выходом интегратора, а выход восьмого элемента сравнения подключен ко входу шестого безинерционного звена, выход шестого безинерционного звена подключен к первому входу девятого элемента сравнения, второй вход которого соединен с выходом первого датчика скорости, выход девятого элемента сравнения через седьмое безинерционное звено подключен к неинвертирующему входу десятого элемента сравнения, инвертирующий вход десятого элемента сравнения соединен с выходом первого датчика скорости, выход десятого элемента сравнения через восьмое безинерционное звено соединен с неинвертирующим входом одиннадцатого элемента сравнения, а инвертирующий вход одиннадцатого элемента сравнения соединен с выходом второго датчика скорости, выход одиннадцатого элемента сравнения соединен со входом девятого безинерционного звена, выход которого является выходом регулятора скорости, причем выход второго элемента сравнения через десятое безинерционное звено соединен с первым входом двенадцатого элемента сравнения, второй вход двенадцатого элемента сравнения подключен к выходу первого датчика скорости, а выход двенадцатого элемента сравнения соединен со входом одиннадцатого безинерционного звена, выход которого является выходом регулятора тока.
| БОРЦОВ Ю.А | |||
| и др | |||
| Автоматизированный электропривод с упругими связями | |||
| - СПб.: Энергоатомиздат, Санкт-Петербург | |||
| отд-ние, 1992, с.70, рис.2.7 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА МЕХАНИЗМА, УПРУГО СВЯЗАННОГО С ЭЛЕКТРОДВИГАТЕЛЕМ, ОДНОКОНТУРНАЯ АСТАТИЧЕСКАЯ ВТОРОГО ПОРЯДКА | 2003 |
|
RU2249242C1 |
| RU 2070766 С1, 20.12.1996 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| Устройство для передачи пневматических сигналов | 1986 |
|
SU1322354A1 |

