ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка основывается на приоритете китайской заявки на патент № CN 201210451298.9, поданной 12 ноября 2012 года, содержание которой полностью включено в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение в целом относится к технологии разработки мобильного терминала, в частности, к способу переключения мобильного терминала в режим ожидания и оборудование для его осуществления соответствующему оборудованию.
УРОВЕНЬ ТЕХНИКИ
[0003] Автомобиль является популярным средством передвижения. К сожалению, многие водители предпочитают использование мобильных терминалов во время вождения, что создает проблему безопасности на дорогах. В аналитическом отчете Национального управления по безопасности дорожного движения США указано, что более 5000 человек по всей стране гибнет в автокатастрофах каждый год из-за недостаточной концентрации во время вождения. Кроме того, отправка коротких сообщений, осуществление телефонных звонков во время вождения является самой распространенной формой небезопасного поведения.
[0004] Существует приблизительно 50 стран и районов в мире, где использование мобильного терминала во время вождения автомобиля прямо запрещено. В некоторых странах предусмотрено очень строгое наказание за это, например, в Сингапуре максимальная сумма штрафа составляет 1000 сингапурских долларов и лишение свободы на полгода за совершение нарушения впервые, и 2000 сингапурских долларов и лишение свободы на 1 год за повторное нарушение. В Великобритании использование мобильного терминала во время вождения может повлечь за собой штраф за «опасное вождение», в связи с чем нарушитель может отправиться в тюрьму на два года. На сегодняшний день во многих городах Китая предусмотрены строгие меры наказания водителей, которые используют мобильные терминалы во время вождения.
[0005] Сегодня, чтобы ограничить использование водителями мобильных терминалов во время вождения применяют один из подходов: контроль водителей дорожной полицией и наказание водителей, которые используют мобильные терминалы для предотвращения использования мобильных терминалов во время вождения.
[0006] Другой подход заключается в следующем: фотографирование и получение информации с помощью камер видеонаблюдения на дорогах и наказание водителей, которых сфотографировали из-за использования мобильного терминала во время вождения, чтобы запретить водителям использовать мобильные терминалы во время управления автомобилем.
[0007] В обоих вышеописанных подходах мониторинга слепые зоны, поэтому полностью достичь цели контроля нельзя и эффективно сократить использование мобильных терминалов во время вождения трудно.
[0008] Таким образом, на сегодняшний день нет технического решения, позволяющего сократить использование мобильных терминалов во время управления автомобилем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Способ переключения мобильного терминала в режим ожидания, и оборудование для его осуществления в соответствии с вариантом осуществления настоящего изобретения используется для уменьшения использования мобильных терминалов во время вождения.
[0010] В соответствии с одним из аспектов, способ переключения мобильного терминала в режим ожидания, обеспечивается настоящим изобретением и включает в себя:
[0011] определение того, что скорость движения мобильного терминала превышает заданную скорость;
[0012] оценка того, находится ли мобильный терминал в пределах зоны водителя; и
[0013] переключение мобильного терминала в режим ожидания, если местоположение мобильного терминала находится в пределах зоны водителя.
[0014] В соответствии с одним из аспектов, оборудование, переключающее мобильный терминал в режим ожидания, предлагаемое настоящим изобретением, включает в себя:
[0015] блок определения, настроенный на определение того, что скорость движения мобильного терминала превышает заданную скорость;
[0016] блок оценки, выполненный с возможностью определения, находится ли мобильный терминал в пределах зоны водителя, и
[0017] блок перехода в режим ожидания, выполненный с возможностью не переключения мобильного терминала в режим ожидания, если тот находится в пределах зоны водителя.
[0018] Способ и оборудование для переключения мобильного терминал в режим ожидания, в соответствии с одним из вариантов осуществления настоящего изобретения, в котором, если скорость движения мобильного терминала превышает заданную скорость, можно определить, что мобильный терминал движется быстро, после этого выполняется оценка того, находиться ли мобильный терминал в зоне водителя и, если мобильный терминал находится в зоне водителя, то это указывает на то, что пользователь использует мобильный терминал во время вождения. В этом случае мобильный терминал переходит в режим ожидания, поэтому использование мобильного терминала водителем во время вождения ограничено и использование мобильного терминала водителем во время вождения снижается.
[0019] Следует понимать, что общее описание выше и подробное описание ниже являются всего лишь примерами и не ограничивают настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Фиг. 1 - первый пример функциональной блок-схемы, которая показывает способ переключения мобильного терминала в режим ожидания в соответствии с вариантом осуществлением настоящего изобретения.
[0021] Фиг. 2 - пример функциональной блок-схемы, которая показывает способ получения данных о скорости движения в соответствии с вариантом осуществления настоящего изобретения.
[0022] Фиг. 3 - пример функциональной блок-схемы, на которой показан способ определения местоположения мобильного терминала в соответствии с вариантом осуществления настоящего изобретения.
[0023] Фиг. 4 - пример функциональной блок-схемы, на которой показан способ сравнения изображений в соответствии с вариантом осуществления настоящего изобретения.
[0024] Фиг. 5 - вид слева и спереди в соответствии с вариантом осуществления настоящего изобретения.
[0025] Фиг. 6 - вид слева и сзади в соответствии с вариантом осуществления настоящего изобретения.
[0026] Фиг. 7 - второй пример функциональной блок-схемы, представляющей способ переключения мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения.
[0027] Фиг. 8 - первый пример структурной блок-схемы, представляющей оборудование, с помощью которого осуществляется переключение мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения.
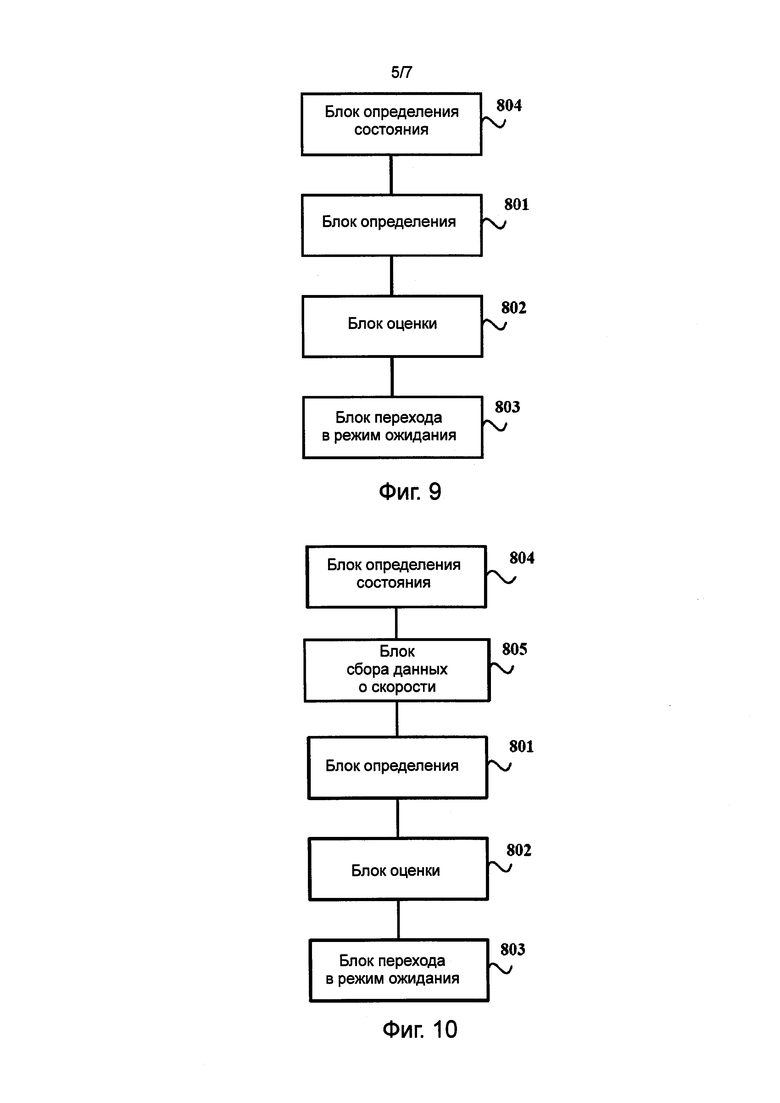
[0028] Фиг. 9 - второй пример структурной блок-схемы, представляющей оборудование, с помощью которого осуществляется переключение мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения.
[0029] Фиг. 10 - третий пример структурной блок-схемы, представляющей оборудование, с помощью которого осуществляется переключение мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения.
[0030] Фиг. 11 - структурная блок-схема, представляющая модуль получения данных о скорости в соответствии с вариантом осуществления настоящего изобретения.
[0031] Фиг. 12 - первый пример структурной блок-схемы, представляющей модуль определения в соответствии с вариантом осуществления настоящего изобретения;
[0032] Фиг. 13 - структурная блок-схема, представляющая модуль управления изображениями в соответствии с вариантом осуществления настоящего изобретения;
[0033] Фиг. 14 - второй пример структурной блок-схемы, представляющей блок оценки в соответствии с вариантом осуществления настоящего изобретения;
[0034] С помощью вышеуказанных сопроводительных чертежей показаны конкретные варианты осуществления изобретения, более подробное описание которых предоставлено ниже. Эти чертежи и текстовое описание никоим образом не ограничивают объем концепции настоящего изобретения, но поясняют концепцию изобретения специалистам в данной области техники через отдельные варианты осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0035] Согласно способу и оборудованию, переключающему мобильный терминал в режим ожидания, в соответствии с вариантами осуществления изобретения, если скорость движения мобильного терминала превышает заданную скорость, то определяется, что мобильный терминал передвигается движется быстро, после этого выполняется оценка того, находится ли мобильный терминал в зоне водителя, и если мобильный терминал находится в зоне водителя, то это указывает на то, что пользователь использует мобильный терминал во время вождения. В этом случае мобильный терминал переключается в режим ожидания, поэтому использование мобильного терминала водителем во время вождения ограничено и использование мобильного терминала водителем во время вождения снижается.
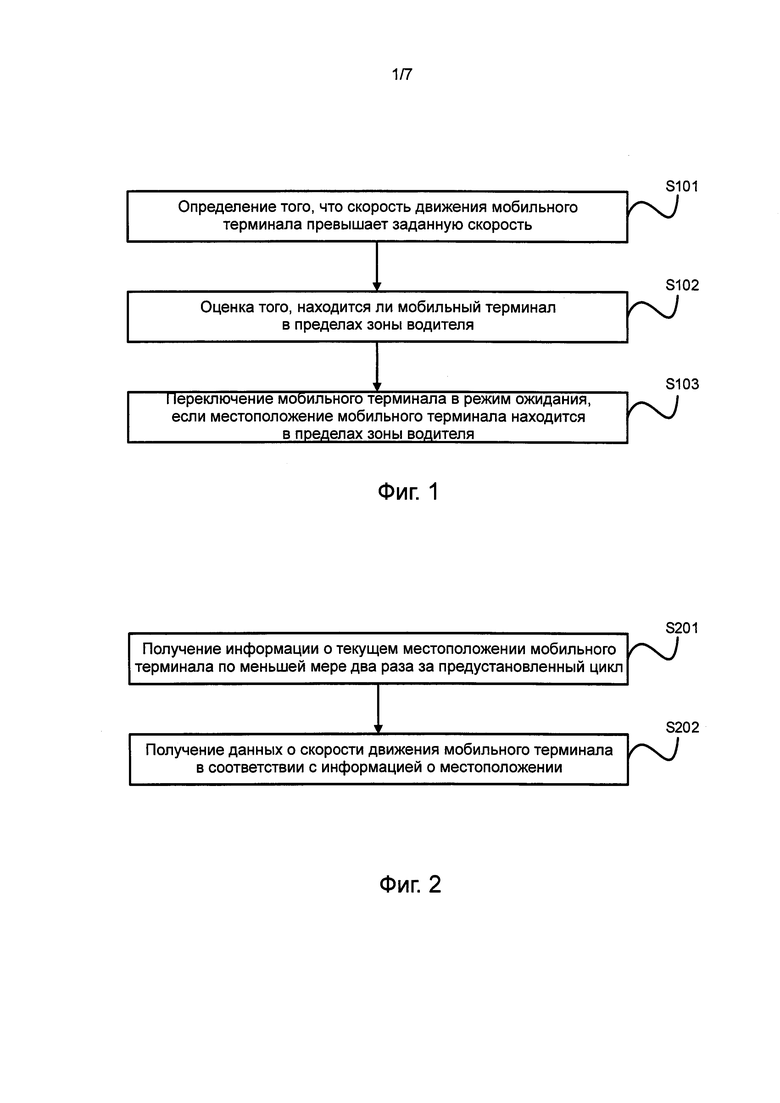
[0036] В соответствии с фиг. 1, способ переключения мобильного терминала в режим ожидания представлен вариантами осуществления настоящего изобретения, и включает в себя:
[0037] на шаге S101: определяется, что скорость передвижения мобильного терминала больше заданной скорости;
[0038] на шаге S102: оценивается, находится ли местоположение мобильного терминала в пределах зоны водителя; и
[0039] на шаге S103: если местоположение мобильного терминала в пределах зоны водителя, мобильный терминал переводится в режим ожидания.
[0040] Когда мобильный терминал движется с относительно большой скоростью, то его скорость движения определенно выше заданной. Затем выполняется оценка того, находится ли мобильный терминал в пределах зоны водителя. Если мобильный терминал находится в пределах зоны водителя, это указывает на то, что пользователь использует мобильный терминал во время вождения и что мобильный терминал может быть переключен в режим ожидания, в результате чего использование мобильного терминала водителем во время вождения ограничено, и использование мобильного терминала пользователем во время вождения снижается.
[0041] Предпочтительно, чтобы отличить состояние пользователя при вождении автомобиля от состояний передвижения с относительно низкими скоростями, например, ходьба пешком, заданную скорость можно установить на 5 км/час. Тем не менее, заданная скорость может быть установлена специалистами в данной области техники на другие приемлемые значения, пока такие значения позволяют различить состояние при движении автомобиля и состояния передвижения с относительно низкой скоростью, например, состояние пользователя при ходьбе пешком.
[0042] Рекомендуется, чтобы до шага S101, можно было определить, находится ли мобильный терминал в рабочем состоянии. То есть, определение местоположения мобильного терминала осуществляется только в случае, если мобильный терминал находится в рабочем состоянии и в состоянии движения, чтобы уменьшить нагрузку в связи с обработкой данных на мобильный терминал.
[0043] В практическом применении определение того, что мобильный терминал находится в рабочем состоянии, включает в себя:
[0044] определение того, что действие, осуществленное пользователем, получено;
[0045] определение того, что запрос вызова принят; или
[0046] определение того, что создается короткое текстовое напоминание.
[0047] Любое из состояний, которые требуют участия пользователя, может быть определено как рабочее состояние. Однако рабочее состояние может также включать в себя другие состояния, которые приглашают пользователя использовать мобильный терминал. Например, определяется, что сработало автоматическое напоминание программного обеспечения, установленного на мобильном терминале.
[0048] Предпочтительно, чтобы, перед шагом S101, мобильный терминал получил данные о скорости движения мобильного терминала в режиме реального времени, чтобы повысить точность оценки скорости движения мобильного терминала.
[0049] Как показано на фиг. 2, в практическом применении получение данных о скорости движения мобильного терминала включает в себя:
[0050] на шаге S201: получение информации о текущем местоположении мобильного терминала по меньшей мере два раза за предварительно установленный цикл; и
[0051] на шаге S202: получение скорости движения мобильного терминала в соответствии с информацией о местоположении.
[0052] Если в числе порций информации о текущем местоположении мобильного терминала, полученной по меньшей мере дважды, две порции информации о местоположении, полученных в два разных момента, отличаются друг от друга, это указывает на то, что местоположения мобильного терминала изменилось с момента получения двух порций информации о местоположении и, таким образом, можно определить, что мобильный терминал находится в состоянии движения. Скорость движения мобильного терминала можно определить, в соответствии с расстоянием и периодом времени изменения местоположений. Предпочтительно, чтобы информация о текущем положении мобильного терминала была получены с помощью глобальной навигационной системы (GPS). Заданный цикл может составлять от 50 мсек до 1 сек.
[0053] Другой способ получения данных о скорости движения мобильного терминала в соответствии с одним из вариантов осуществления настоящего изобретения включает в себя:
[0054] данные о скорости движения мобильного терминала получают с помощью бортового компьютера как скорость движения мобильного терминала.
[0055] Кроме того, другие возможные способы, которые не указаны в настоящем документе, также могут использовать специалисты для получения данных о скорости движения мобильного терминала.
[0056] На шаге S102, различными способами можно определить, находится ли мобильный терминал в пределах зоны водителя. Предпочтительно, чтобы, как показано на фиг. 3, способ оценки, находится ли мобильный терминал в пределах зоны водителя, в соответствии с вариантом осуществления настоящего изобретения может включать в себя следующее:
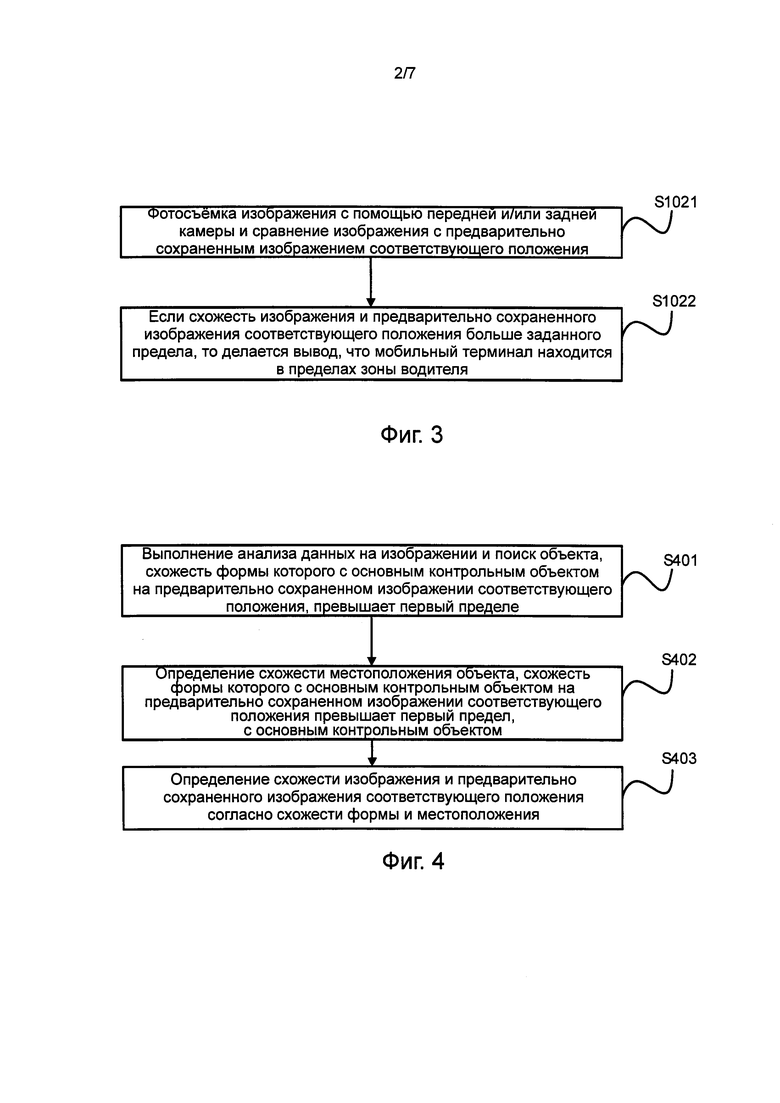
[0057] на шаге S1021, делается снимок передней и/или задней камерой, и осуществляется сравнение с предварительно сохраненным изображением соответствующего положения; и
[0058] на шаге S1022, если имеется сходство изображения на снимке снимка и предварительно сохраненного изображения соответствующего положения больше заданного предела, то делается вывод, что мобильный терминал находится в пределах зоны водителя.
[0059] В общем, существуют автомобили с левосторонним и правосторонним управлением, и когда пользователь на месте водителя держит мобильный терминал в руке, можно легко сделать фото спереди и/или сзади водителя. Таким образом, предварительно сохраненное изображение соответствующего положения может включать в себя:
[0060] вид слева и спереди, которые сняты камерой и сохранены заранее перед положением водителя в автомобиле с левосторонним управлением, вид справа и спереди, которые сняты камерой и сохранены заранее перед положением водителя в автомобиле в с правосторонним управлением, вид слева и сзади, которые сняты камерой и сохранены заранее сзади положения водителя в автомобиле с левосторонним управлением, вид справа и сзади, которые сняты камерой и сохранены заранее сзади положения водителя в автомобиле с правосторонним управлением.
[0061] Сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения включает в себя:
[0062] район, где располагается мобильный терминал, определяется в зависимости от типа существующей сети; и
[0063] если район, где располагается мобильный терминал, является районом с правосторонним движением, изображением полученное с помощью передней камеры, сравнивается с видом слева и спереди, а изображение, сделанное задней камерой, сравнивается с видом слева и сзади; если же мобильный терминал находится в районе с левосторонним движением, изображение, полученное с помощью передней камеры, сравнивается с видом справа и спереди, а изображение, полученное с помощью задней камеры, сравнивается с видом справа и сзади.
[0064] Здесь, сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения на шаге S1021, в частности, включает в себя:
[0065] район, где находится водитель, определяется в зависимости от типа существующей сети; и
[0066] если район, где находится водитель, является районом с правосторонним движением, изображение, полученное с помощью передней камеры, сравнивается с видом слева и спереди, а изображение, сделанное задней камерой, сравнивается с видом слева и сзади; если же водитель находится в районе с левосторонним движением, изображение, полученное с помощью передней камеры, сравнивается с видом справа и спереди, а изображение, полученное с помощью задней камеры, сравнивается с видом справа и сзади.
[0067] Здесь определение района, где находится водитель, в соответствии с типом существующей сети можно осуществить путем получения кода страны в системе мобильной связи (КССМС) и кода сети мобильной связи (КСМС) существующей сети. Текущую страну и район можно определить в соответствии с КССМС и КСМС, в результате чего можно определить, является ли страна районом с левосторонним или с правосторонним движением (на пример, Гонконг является районом с левосторонним движением).
[0068] Затем, основной контрольный объект может быть предустановлен в предварительно сохраненных изображениях соответствующего положения, а объект с формой, аналогичной форме основного контрольного объекта, должен быть обнаружен на изображении. Такое сходство изображения на фотографии и предварительно сохраненного изображения соответствующего положения можно определить по схожести формы и местоположения основного контрольного объекта и объекта с аналогичной формой. Как показано на фиг. 4, сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения на шаге S1021 включает в себя:
[0069] на шаге S401, осуществление анализа данных на изображении и поиск объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующей позиции превышает первый предел;
[0070] на шаге S402, определение схожести местоположения объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующей позиции превышает первый предел, с основным контрольным объектом; и
[0071] на шаге S403, сходство изображения на фотографии и предварительно сохраненного изображения соответствующего положения определяется по схожести формы и местоположения.
[0072] Здесь шаг S403 может осуществляться другими способами, например, анализ данных и др., которые не будут повторно описаны в настоящем документе.
[0073] Предпочтительно установить первый предел на уровне 60%-90%, его можно определить, в частности, согласно выбранному основному контрольному объекту. Если разница формы основного контрольного объекта в различных автомобилях незначительна, то первый предел можно установить на уровне 80%-90%, а если разница формы основного контрольного объекта в различных автомобилях большая, то первый предел можно установить на уровне 60%-70%.
[0074] Сходство изображения на фотографии и предварительно сохраненного изображения соответствующего положения определяется и по схожести формы, и по схожести местоположения, тем самым предотвращается ситуация, при которой, если оценка осуществляется только по схожести формы, пользователь в положении рядом с водителем также определяется как водитель автомобилем, в связи с этим, нормальное использование этим пользователем мобильного терминала невозможно. Также предотвращается ситуация, в которой, если оценка выполняется только на основании схожести местоположения, результат определения неправильный, поскольку различие между местоположением полученного изображения и предварительно сохраненного изображения незначительное, и поэтому, мобильный терминал не будет переведен в режим ожидания во время вождения автомобиля пользователем.
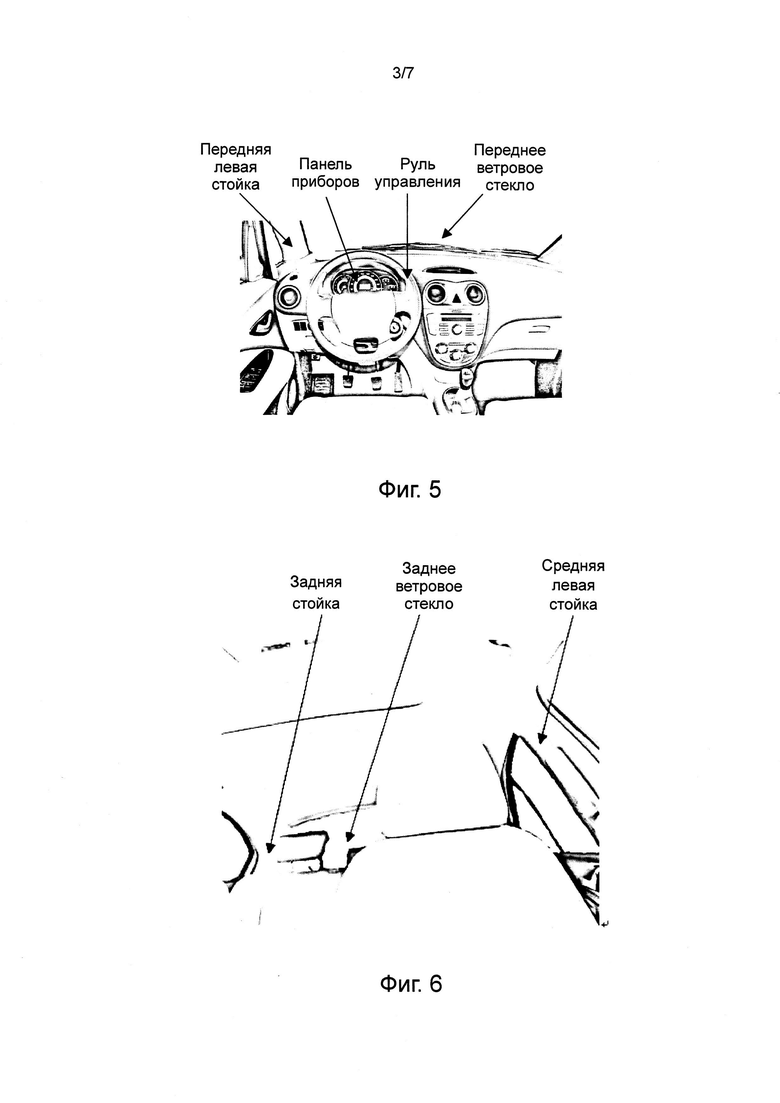
[0075] Кроме того, если предварительно сохраненное изображение соответствующего положения является видом слева и спереди, как показано на фиг. 5, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0076] руль управления, панель приборов, переднюю левую стойку и переднее ветровое стекло.
[0077] Если предварительно сохраненное изображение соответствующего положения является видом справа и спереди, что является зеркальным отображением изображения на фиг. 5, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0078] руль управления, панель приборов, переднюю правую стойку и переднее ветровое стекло.
[0079] Если предварительно сохраненное изображение соответствующего положения является видом слева и сзади, как показано на фиг. 6, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0080] среднюю левую стойку, заднее ветровое стекло и заднюю стойку. Если предварительно сохраненное изображение соответствующего положения является видом справа и сзади, что является зеркальным отображением изображения на фиг. 6, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0081] среднюю правую стойку, заднее ветровое стекло и заднюю стойку.
[0082] Вместе с тем, возможные другие способы, которые не указаны в настоящем документе, также могут использовать специалисты для установки основного контрольного объекта.
[0083] На практике установленное пороговое значение на шаге S1022 можно определить в зависимости от выбора основного контрольного объекта. Например, если основным контрольным объектом на виде слева и спереди является руль управления или передняя левая стойка, то, поскольку существует большое количество видов рулей управления и относительно большая разница между ними, то предел устанавливается только на уровне 60%-70%, чтобы избежать ситуации, когда пользователь, который сидит за рулем оценивается как пользователь, которые не сидит за рулем из-за разницы в форме. Если основным контрольным объектом на виде слева и сзади является заднее ветровое стекло или задняя стойка, то, поскольку форма заднего ветрового стекла или задней стойки относительно одинаковы и существует только разница в местоположении на изображении заднего ветрового стекла или задней стойки, сфотографированного из положения водителя, и изображения заднего ветрового стекла или задней стойки, сфотографированного из положения пассажира, сидящего возле водителя, то предел можно установить на уровне 80%-90%, чтобы предотвратить получение неправильного результат оценивания того, управляет ли пользователь автомобилем.
[0084] Способ оценивания того, находится ли местоположение мобильного терминала в пределах зоны водителя в соответствии с вариантом осуществления настоящего изобретения, включает в себя:
[0085] определение того, находится ли мобильный терминал в пределах зоны водителя, осуществляемое с помощью датчика автомобиля.
[0086] По меньшей мере один датчик должен быть установлен в различных местах внутри автомобиля. Например, можно установить инфракрасный датчик возле сиденья водителя и, если мобильный терминал получает сигнал от инфракрасного датчика, он указывает на то, что мобильный терминал находится в пределах зоны водителя. Чтобы избежать "слепых зон" в пределах зоны водителя, датчики можно установить в трех или четырех местах внутри автомобиля. Это позволит точно определить местоположение мобильного терминала.
[0087] Кроме того, другие датчики и другие возможные способы, не указанные в настоящем документе, могут быть использованы специалистами для оценивания точного местоположения мобильного терминала с целью оценки того, находится ли мобильный терминал в пределах зоны водителя.
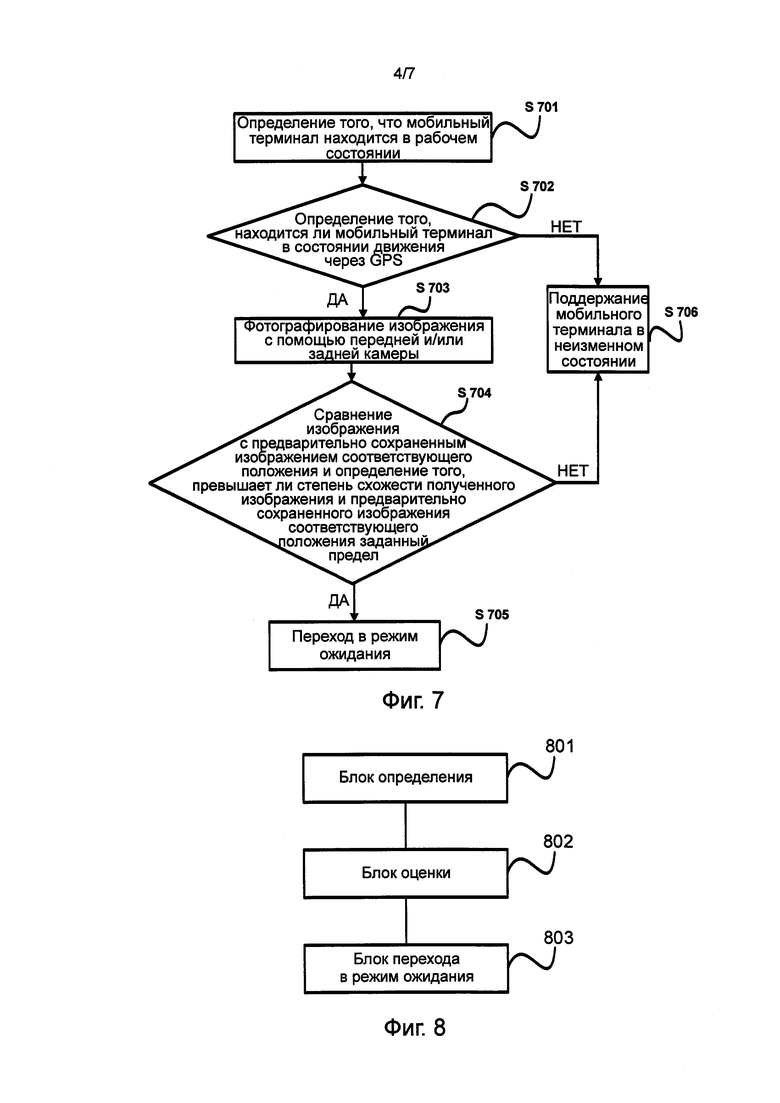
[0088] Далее, как показано на фиг. 7, конкретный способ перевода мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения включает в себя:
[0089] на шаге S701 определяется, что мобильный терминал в рабочем состоянии;
[0090] на шаге S702 с помощью GPS определяется, движется ли мобильный терминал, если мобильный терминал движется, то выполняется шаг S703, а если мобильный терминал не движется, то выполняется шаг S706;
[0091] на шаге S703, делается снимок передней и/или задней камерой,
[0092] на шаге S704, полученное изображение сравнивается с предварительно установленным изображением соответствующего положения и определяется, превышает ли сходство полученного изображения и предварительно установленного изображения соответствующего положения заданного предела. Если сходство превышает заданный предел, выполняется шаг S705, если не превышает, то выполняется шаг S706; и
[0093] на шаге S705 выполняется переход в режим ожидания; а
[0094] на шаге S706 состояние мобильного терминала остается неизменным.
[0095] Как показано на фиг. 8, оборудование, переключающее мобильный терминал в режим ожидания в соответствии с вариантом осуществления настоящего изобретения, включает в себя:
[0096] блок 801 определения, настроенный на определение того, что скорость движения мобильного терминала превышает заданную скорость;
[0097] блок 802 оценки, настроенный на оценку того, находится ли мобильный терминал в пределах зоны водителя; и
[0098] блок 803 перехода в режим ожидания, настроенный на переключение мобильного терминала в режим ожидания, если местоположение мобильного терминала находится в пределах зоны водителя.
[0099] Когда мобильный терминал движется с относительно высокой скоростью, то его скорость движения определенно выше заданной скорости. Затем выполняется оценка того, находится ли мобильный терминал в пределах зоны водителя. Если мобильный терминал находится в пределах зоны водителя, это указывает на то, что пользователь использует мобильный терминал во время вождения и что мобильный терминал можно переключить в режим ожидания, в результате чего использование мобильного терминала водителем во время вождения будет ограничено, а количество случаев использования мобильного терминала пользователем во время вождения снижается.
[0100] Предпочтительно, чтобы отличить состояние вождения автомобиля от состояний движения с относительно низкими скоростями, например, движение пешком, заданную скорость можно установить на 5 км/час. Тем не менее, заданную скорость специалисты могут установить на другие приемлемые значения, при условии, что такие значения позволяют различить состояние перемещения в автомобиле и состояний движения с относительно низкими скоростями, например, пешком.
[0101] Предпочтительно, как показано на фиг. 9, чтобы оборудование для переключения мобильного терминала в режим ожидания в соответствии с вариантом осуществления настоящего изобретения также включало в себя: блок 804 определения состояния, настроенный на определение того, находится ли мобильный терминал в рабочем режиме.
[0102] При определении блоком 804 определения состояния того, находится ли мобильный терминал в рабочем режиме, определение местоположения мобильного терминала можно выполнить только в случае, если мобильный терминал находится в рабочем состоянии и в состоянии движения, чтобы уменьшить нагрузку на мобильный терминал, связанной с обработкой данных.
[0103] В практическом применении определение блоком 804 определения состояния того, что мобильный терминал находится в рабочем состоянии, включает в себя:
[0104] Определение того, что действие, осуществленное пользователем, получено;
[0105] Определение того, что запрос вызова принят; или
[0106] Определение того, что создается короткое текстовое напоминание.
[0107] Любое из состояний, которые требуют участия пользователя, можно определить как рабочее состояние. Однако рабочее состояние может также включать в себя другие состояния, которые приглашают пользователя использовать мобильный терминал. Например, определяется, что сработало автоматическое напоминание программного обеспечения, установленного на мобильном терминале.
[0108] Предпочтительно, как показано на фиг. 10, до того как блок 801 определения определит, что скорость движения мобильного терминала превышает заданную скорость, оборудование с помощью которого осуществляется переключение мобильного терминала в режим ожидания в соответствии с вариантом осуществлением настоящего изобретения также включает в себя следующий модуль:
[0109] блок 805 сбора данных о скорости движения, выполненный с возможностью получение данных о скорости движения мобильного терминала.
[0110] Блок 805 сбора данных о скорости может получать данные о скорости движения мобильного терминала в режиме реального времени для повышения точности определения скорости движения мобильного терминала.
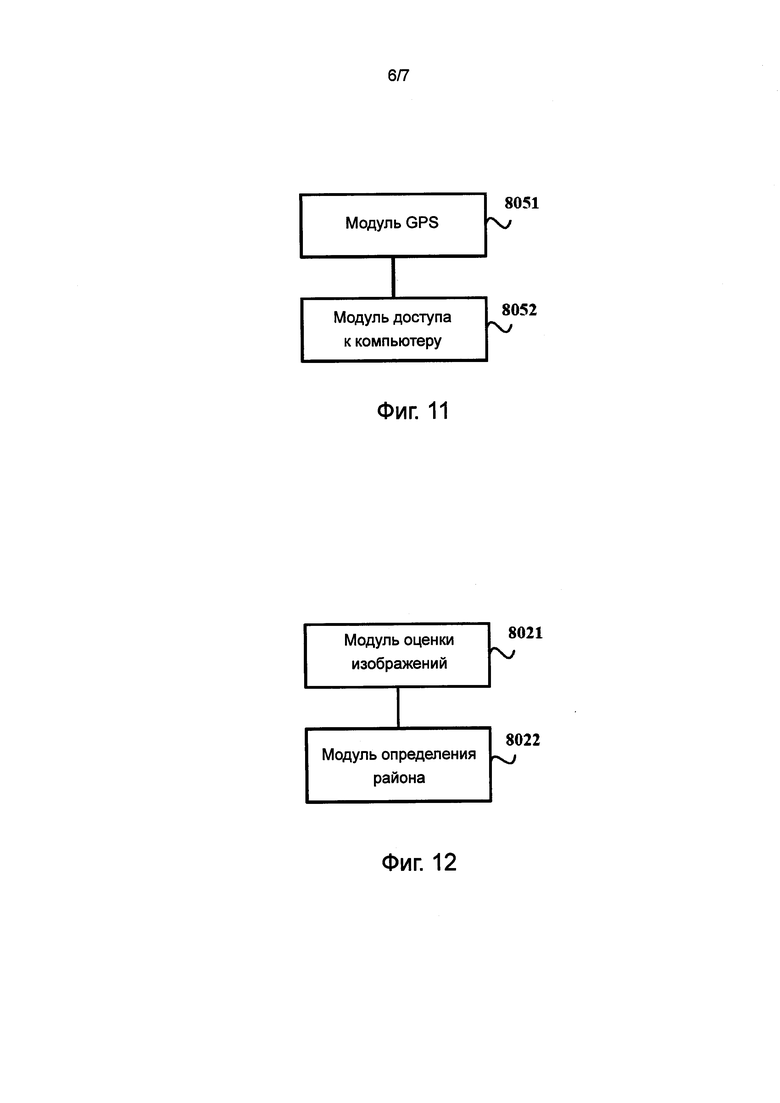
[0111] На практике, как показано на фиг. 11, блок 805 сбора данных о скорости включает в себя следующий модуль:
[0112] модуль 8051 GPS, выполненный для получение информации о текущем местоположении мобильного терминала по меньшей мере два раза за предустановленный цикл и на получение данных о скорости перемещения мобильного терминала в соответствии с данными о местоположении.
[0113] Если в числе порций информации о текущем местоположении мобильного терминала, полученных по меньшей мере дважды, две порции информации о местоположении, полученных в два разных момента, отличаются друг от друга, это указывает на то, что местоположение мобильного терминала изменилось когда получены две порции информации о местоположении и, таким образом, можно определить, что мобильный терминал движется. Данные о скорости движения мобильного терминала можно получить, в соответствии с расстоянием и временем изменения местоположения. Предпочтительно, получение информации о текущем местоположении мобильного терминала можно осуществлять с помощью GPS. Заданный цикл может составлять от 50 мсек до 1 сек.
[0114] Далее, как показано на фиг. 11, блок 805 сбора данных о скорости может также включать в себя следующий модуль:
[0115] модуль 8052 доступа к компьютеру, выполненный с возможностью получения данных о скорости движения автомобиля с помощью бортового компьютера как скорости перемещения мобильного терминала.
[0116] Кроме того, другие возможные способы, не указанные в настоящем документе, могут также использоваться специалистами для получения данных о скорости движения мобильного терминала, которые здесь повторно не описываются.
[0117] На практике блок 802 оценки может быть представлен в разных исполнениях, которые позволяют ему осуществлять оценку того, находится ли мобильный терминал в пределах зоны водителя. Предпочтительно блок оценки в соответствии с вариантом осуществления настоящего изобретения, как показано на фиг. 12, может включать в себя следующий модуль:
[0118] модуль 8021 оценки изображений, выполнен для выполнения фотографирования с помощью передней и/или задней камеры, сравнения полученного изображения с предварительно сохраненным изображением соответствующего положения и оценку того, что мобильный терминал находится в пределах зоны водителя, если сходство изображением на фотографии и предварительно сохраненного изображения соответствующего положения превышает заданный предел.
[0119] В общем, существуют автомобили с левосторонним и правосторонним управлением, и когда пользователь, который сидит на месте водителя, держит мобильный терминал в руке, можно легко сделать фото спереди и/или сзади водителя. Таким образом, предварительно сохраненное изображение соответствующей позиции может включать в себя:
[0120] вид слева и спереди, которые сняты камерой и сохранены заранее перед положением водителя в автомобиле с левосторонним управлением, вид справа и спереди, которые сняты камерой и сохранены заранее перед положением водителя в автомобиле в с правосторонним управлением, вид слева и сзади, которые сняты камерой и сохранены заранее сзади положения водителя в автомобиле в с левосторонним управлением, вид справа и сзади, которые сняты камерой и сохранены заранее сзади положения водителя в автомобиле с правосторонним управлением.
[0121] модуль 8021 оценки изображений, сравнивающий полученное изображение с предварительно сохраненным, включает в себя:
[0122] район, где находится мобильный терминал, определяется в зависимости от типа существующей сети; и
[0123] если район, где находится мобильный терминал, является районом с правосторонним движением, изображение, полученное с помощью передней камеры, сравнивается с видом слева и справа, а изображение, сделанное задней камерой, сравнивается с видом слева и сзади; если же мобильный терминал находится в районе с левосторонним движением, изображение, полученное с помощью передней камеры, сравнивается с видом справа и спереди, а изображение, полученное с помощью задней камеры, сравнивается с видом справа и сзади.
[0124] Далее, как показано на фиг. 12, блок 802 оценки может также включать в себя следующие модули:
[0125] модуль 8022 определения района, выполненный для выполнения определения района, где находится водитель по типу используемой сети; и
[0126] модуль 8021 оценки изображений, выполненный для выполнения сравнения изображения, полученного с помощью передней камеры, с видом слева и спереди, и изображения, полученного с помощью задней камеры, с видом слева и сзади, если район, где находится водитель, с правосторонним движением, и на сравнение изображения, полученного с помощью передней камеры, с видом справа и спереди, и изображения, полученного с помощью задней камеры, с видом справа и сзади, если район, где находится водитель, с левосторонним движением.
[0127] Здесь определение района, где находится водитель, в соответствии с типом используемой сети можно осуществить путем получения кода страны в системе мобильной связи (КССМС) и кода сети мобильной связи (КСМС) используемой сети. Текущую страну и район можно определить в соответствии с КССМС и КСМС, в результате чего можно определить, является ли страна районом с левосторонним или с правосторонним движением.
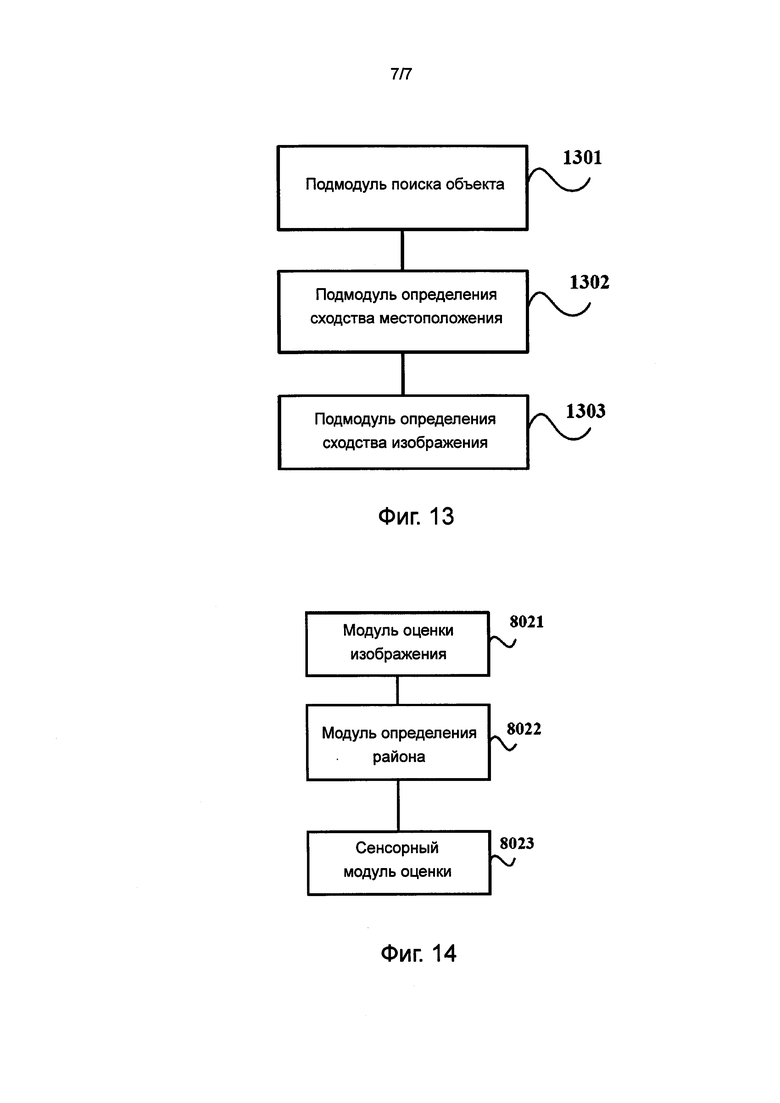
[0128] Затем, основной контрольный объект должен быть предустановлен в предварительно сохраненных изображениях соответствующего положения, а объект с формой, аналогичной форме основного контрольного объекта, должен быть обнаружен на изображении. Такое сходство изображения на фотографии и предварительно сохраненного изображения соответствующего положения можно определить по схожести формы и местоположения основного контрольного объекта и объекта с аналогичной формой. Как показано на фиг. 13, модуль оценки 8021 изображений включает в себя следующие модули:
[0129] Подмодуль 1301 поиска объекта, выполненный для осуществления анализа изображения и поиск объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения превышает первый предел;
[0130] подмодуль 1302 определения схожести местоположения, выполненный для определение схожести местоположения объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения превышает первый предел, с местоположением основного контрольного объекта; и
[0131] подмодуль 1303 определения схожести изображения, выполненный для определение схожести полученного изображения и предварительно сохраненного изображения соответствующего положения на основании схожести формы и местоположения.
[0132] Здесь подмодуль 1303 определения схожести изображения выполнен для определения схожести полученного изображения и предварительно сохраненного изображения соответствующего положения на основании схожести формы и местоположения, что можно осуществить с помощью таких способов, как анализ данных и др., которые не описаны здесь.
[0133] Предпочтительно первый предел может быть установлен на уровне 60%-90% и может быть определен, в частности, согласно выбранному основному контрольному объекту. Если разница формы основного контрольного объекта в различных автомобилях незначительна, то первый предел можно установить на уровне 80%-90%, а если разница формы основного контрольного объекта в различных автомобилях большая, то первый предел может быть установлен на уровне 60%-70%.
[0134] Сходство полученного изображения и предварительно сохраненного изображения соответствующего положения определяется в соответствии со схожестью как форм, так и местоположений, благодаря чему предотвращается ситуация, в которых, если определение осуществляется только на основании формы, пользователь на месте рядом с водителем также определяется как водитель и, в связи с этим, нормальное использование этим пользователем мобильного терминала невозможно. Также предотвращается ситуация, в которой, если определение выполняется только на основании схожести местоположения, результат определения неправильный, поскольку различие между местоположением полученного изображения и местоположением предварительно сохраненного изображения незначительное, и поэтому мобильный терминал не будет переведен в режим ожидания во время вождения пользователем автомобиля.
[0135] Кроме того, если предварительно сохраненное изображение соответствующего положения является видом слева и спереди, как показано на фиг. 5, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0136] руль управления, панель приборов, переднюю левую стойку и переднее ветровое стекло.
[0137] Если предварительно сохраненное изображение соответствующего положения является видом справа и спереди, что является зеркальным отображением изображения на фиг.5, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0138] руль управления, панель приборов, переднюю правую стойку и переднее ветровое стекло.
[0139] Если предварительно сохраненное изображение соответствующего положения является видом слева и сзади, как показано на фиг. 6, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0140] среднюю левую стойку, заднее ветровое стекло и заднюю стойку; и
[0141] Если предварительно сохраненное изображение соответствующего положения является видом справа и сзади, что является зеркальным отображением изображения на фиг. 6, основной контрольный объект на шаге S401 включает в себя один из следующих объектов или их комбинацию:
[0142] правую среднюю стойку, заднее ветровое стекло и заднюю стойку.
[0143] Вместе с тем, другие возможные способы, которые не указаны в настоящем документе, могут также использоваться специалистами для установки основного контрольного объекта, которые не будут повторены в описании.
[0144] На практике, установленный предел в соответствии с которым блок 802 оценки осуществляет оценку, можно ли установить зависимость от выбора основного контрольного объекта. Например, если основным контрольным объектом левого и переднего вида является руль управления или левая и передняя стойка, то, поскольку существует большое количество видов рулей управления и относительно большая разница между ними, то предел устанавливается только на уровне 60%-70%, чтобы избежать ситуации, когда пользователь, который сидит за рулем, оценивается как пользователь, который не сидит за рулем из-за разницы в форме. Если основным контрольным объектом левого и заднего вида является заднее ветровое стекло или задняя стойка, то, поскольку форма заднего ветрового стекла или задней стойки относительно одинаковы и существует только разница в местоположении на изображении заднего ветрового стекла или задней стойки, сфотографированного из положения водителя, и изображения заднего ветрового стекла или задней стойки, сфотографированного из положения пассажира, сидящего возле водителя, предел можно установить на уровне 80%-90%, чтобы предотвратить получение неправильного результат оценки того, управляет ли пользователь автомобилем.
[0145] Предпочтительно, как показано на фиг. 14, чтобы блок 802 оценки в оборудовании, с помощью которого осуществляется переключение мобильного терминала в режим ожидания в соответствии с вариантом осуществлением настоящего изобретения, может также включать в себя:
[0146] сенсорный модуль 8023 оценки, выполненный для определения того, находится ли мобильный терминал в пределах зоны водителя с помощью датчика в автомобиле.
[0147] На практике по меньшей мере один датчик должен быть установлен в разных местах внутри автомобиля. Например, инфракрасный датчик можно установить возле сиденья водителя и, если мобильный терминал получает сигнал от инфракрасного датчика, он указывает на то, что мобильный терминал находится в пределах зоны водителя. Чтобы избежать «слепых зон» в пределах зоны водителя, датчики можно установить в трех или четырех местах внутри автомобиля. Это позволит точно определить местоположение мобильного терминала.
[0148] Вместе с тем, другие датчики и другие возможные способы, не указанные в настоящем документе, могут использоваться специалистами для определения точного местоположения мобильного терминала для определения того, находится ли мобильный терминал в пределах зоны водителя, и которые не описываются повторно.
[0149] Другие возможные способы, которые не указаны в настоящем документе, могут также использоваться специалистами для определения того, находится ли мобильный терминал в пределах зоны водителя.
[0150] Согласно способу и оборудованию, переключающему мобильный терминал в режим ожидания, в соответствии с вариантом осуществления настоящего изобретения, если скорость передвижения мобильного терминала превышает заданную скорость, то определяется, что мобильный терминал движется быстро, затем оценивается, находится ли мобильный терминал в пределах зоны водителя и, если терминал находится в пределах зоны водителя, это означает, что пользователь использует мобильный терминал во время вождения, в результате чего мобильный терминал переводится в режим ожидания для того, чтобы ограничить использование мобильного во время вождения и сократить случаи использования мобильного терминала пользователем во время вождения.
[0151] Специалисты в данной области должны понимать, что варианты осуществления настоящего изобретения можно предоставить в виде способов, систем и компьютерных программных продуктов. Таким образом, варианты осуществления настоящего изобретения могут принимать форму только аппаратного или программного обеспечения или комбинации аппаратного и программного обеспечения. Кроме того, изобретение может принимать форму компьютерных программный продуктов, размещаемых на одном или нескольких носителях информации, которые совместимы с компьютером, (включая, но не ограничиваясь, дисковым накопителем и оптическим запоминающим устройством и т.д.) которые содержат программные коды, совместимые с компьютером.
[0152] Изобретение описано на примерах способа, устройства (системы) и функциональных блок-схем и/или структурных блок-схем компьютерных программ в соответствии с вариантами осуществления настоящего изобретения. Следует понимать, что каждый процесс и/или блок функциональных блок-схем и/или структурных блок-схем, и комбинации процессов и/или блоков функциональных блок-схем и/или структурных блок-схем, можно реализовать с помощью инструкций компьютерной программы. Такие инструкции компьютерной программы можно отдавать компьютеру общего назначения, специальному компьютеру и встроенному процессору или процессору других программируемых устройств обработки данных с целью создания машины таким образом, чтобы с помощью инструкций, выполняемых компьютером или другим программируемым устройством обработки данных, можно было создать устройство для выполнения функций, предусмотренных одним или более процессами в функциональных блок-схемах и/или одним или более блоками структурных блок-схем.
[0153] Эти инструкции компьютерной программы необходимо сохранить в машиночитаемом устройстве хранения информации, которое может загрузить компьютер или другое программируемое устройство обработки данных для работы определенным образом так, чтобы произведенные товары, содержащие устройство с инструкциями, можно было создать инструкциями, сохраненными в указанном машиночитаемом устройстве хранения информации, и указанное устройство с инструкциями выполняет функции, предусмотренные в одном или более процессах в функциональных блок-схемах и/или в одном или более блоков структурных блок-схем.
[0154] Эти инструкции компьютерной программы необходимо загрузить в компьютер или другое программируемое устройство обработки данных таким образом, чтобы серия рабочих шагов могла выполняться на компьютере или другом программируемом устройстве обработки данных для того, чтобы запустить процессы, выполняемые компьютером, таким образом, что шаги осуществления функций, предусмотренные в одном или более процессах функциональных блок-схем и/или одном или более блоках структурных блок-схем, могли быть обеспечены инструкциями, выполняемыми на компьютере или других программируемых устройствах обработки данных.
[0155] Хотя описаны предпочтительные варианты осуществления настоящего изобретения, но если специалисты в данной области изучат основную концепцию изобретения, можно внести изменения в данные варианты. Таким образом, прилагаемая формула изобретения должна толковаться как охватывающая предпочтительные варианты осуществления настоящего изобретения и все изменения, входящие в объем настоящего изобретения.
[0156] Несомненно, специалисты в данной области техники могут вносить различные изменения в изобретение, не отходя от концепции и объема изобретения. Таким образом, изобретение также включает в себя такие изменения, если они входят в объем формулы изобретения и аналогичной ему технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интеллектуальной парковки и устройства для его реализации | 2020 |
|
RU2793737C1 |
| Способ и устройство для обработки информации о дорожном движении | 2015 |
|
RU2634365C2 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ПАРКОВОЧНОМ БАРЬЕРЕ НА ОСНОВАНИИ ИСТОРИИ ДВИЖЕНИЯ | 2016 |
|
RU2729137C2 |
| Способ и интеллектуальная система обеспечения безопасности средств индивидуальной мобильности | 2024 |
|
RU2829379C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ПРЕДЛОЖЕНИЯ СОВМЕСТНОЙ ПОЕЗДКИ ПОСРЕДСТВОМ УСТРОЙСТВА ОБРАБОТКИ ИНФОРМАЦИИ И ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ С ПРОГРАММОЙ | 2019 |
|
RU2717910C1 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ И СПОСОБ АНАЛИЗА ПРЕДУПРЕЖДЕНИЙ, СВЯЗАННЫХ С АВТОМОБИЛЬНЫМ ДВИЖЕНИЕМ | 2014 |
|
RU2625522C2 |
| НАВИГАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2004 |
|
RU2383056C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОВЕРШЕНИЯ ВЫЗОВА | 2015 |
|
RU2643528C2 |
| Способ определения опасных состояний на дорогах общего пользования на основе мониторинга ситуации в кабине транспортного средства | 2018 |
|
RU2703341C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРОИСШЕСТВИЙ | 2015 |
|
RU2711835C2 |
Изобретение относится к мобильным терминалам. Техническим результатом является ограничение использования мобильного терминала водителем во время вождения. Способ и оборудование для переключения мобильного терминала в режим ожидания по одному из вариантов осуществления настоящего изобретения включают в себя: определение того, что скорость движения мобильного терминала превышает заданную скорость, определение того, находится ли мобильный терминал в пределах зоны водителя; и переключение мобильного терминала в режим ожидания, если он находится в пределах зоны водителя. Если скорость движения мобильного терминала превышает заданную скорость, то делается вывод, что мобильный терминал движется быстро, затем определяется, находится ли мобильный терминал в пределах зоны водителя, и если терминал находится в пределах зоны водителя, это означает, что пользователь использует мобильный терминал во время вождения, в результате чего мобильный терминал переключается в режим ожидания для того, чтобы ограничить использование мобильного терминала во время вождения и сократить количество случаев использования мобильного терминала пользователем во время вождения. 2 н. и 9 з.п. ф-лы, 14 ил.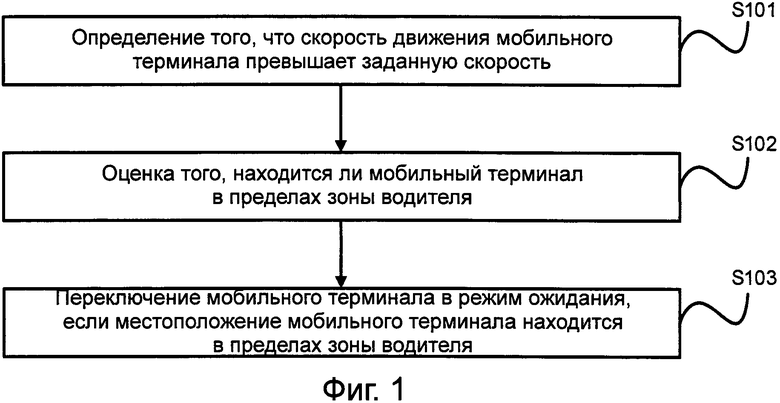
1. Способ переключения мобильного терминала в режим ожидания, включающий в себя
определение того, что мобильный терминал находится в рабочем состоянии, которое включает в себя установление наличия
задействования мобильного терминала пользователем, или
выполнения запроса вызова; или
создания короткого текстового сообщения,
определение скорости движения мобильного терминала и установление того, превышает ли она заданную скорость,
определение того, находится ли мобильный терминал в пределах зоны водителя, и переключение мобильного терминала в режим ожидания, если мобильный терминал находится в пределах зоны водителя, причем определение того, находится ли мобильный терминал в пределах зоны водителя, включает в себя
фотосъемку изображения с помощью передней и/или задней камеры и сравнение изображения с предварительно сохраненным изображением соответствующего положения, и
оценку того, что мобильный терминал находится в пределах зоны водителя, если сходство полученного изображения и предварительно сохраненного изображения соответствующего положения превышает заданный предел (сходства); причем
сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения включает в себя.
выполнение анализа данных на изображении и поиск объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения превышает первый предел,
определение схожести местоположения объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения превышает первый предел, с помощью основного контрольного объекта, и
определение схожести изображения и предварительно сохраненного изображения соответствующего положения согласно схожести формы и местоположения.
2. Способ по п. 1, отличающийся тем, что перед определением того, что скорость передвижения мобильного терминала превышает заданную скорость, способ также включает в себя
получение данных о скорости движения мобильного терминала.
3. Способ по п. 1, отличающийся тем, что получение данных о скорости перемещения мобильного терминала включает в себя
получение информации о текущем местоположении мобильного терминала по меньшей мере два раза за предустановленный цикл и получение данных о скорости перемещения мобильного терминала согласно информации о местоположении, или
получение данных о скорости автомобиля с помощью бортового компьютера в качестве скорости движения мобильного терминала.
4. Способ по п. 1, отличающийся тем, что предварительно сохраненное изображение соответствующего положения включает в себя
вид слева и спереди, который сфотографирован и сохранен заранее перед положением водителя автомобиля с левосторонним управлением; вид справа и спереди, который сфотографирован и сохранен заранее перед положением водителя автомобиля с правосторонним управлением; вид слева и сзади, который сфотографирован и сохранен заранее сзади положения водителя автомобиля с левосторонним управлением; и вид справа и сзади, который сфотографирован и сохранен заранее сзади положения водителя автомобиля с правосторонним управлением, и
сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения, которое включает в себя
определение района, где находится мобильный терминал по используемой сети на основе кода страны в системе мобильной связи и кода сети мобильной связи, и
сравнение изображения, полученного с помощью передней камеры, с видом слева и спереди, и сравнение изображения, полученного с помощью задней камеры, с видом слева и сзади, если район, где находится мобильный терминал является районом с правосторонним движением; и сравнение изображения, полученного с помощью передней камеры, с видом справа и спереди, и сравнение изображения, полученного с помощью задней камеры, с видом справа и сзади, если район, где находится мобильный терминал является районом с левосторонним движением.
5. Способ по п. 1, отличающийся тем, что определение того, находится ли мобильный терминал в пределах зоны водителя, осуществляется с помощью датчика в автомобиле.
6. Оборудование, переключающее мобильный терминал в режим ожидания, содержащее
блок определения состояния, выполненный с возможностью определения того, находится ли мобильный терминал в рабочем состоянии,
блок определения, выполненный для определения того, что скорость движения мобильного терминала превышает заданную скорость,
блок оценки зоны водителя, выполненный для определения того, находится ли мобильный терминал в пределах зоны водителя, связанный с камерами переднего и заднего видов зоны водителя, причем блок оценки зоны водителя включает в себя
модуль оценки изображений, выполненный для получение изображения, полученного с помощью передней и/или задней камеры, и сравнение полученного изображения с предварительно сохраненным изображением соответствующего положения, и определение того, что мобильный терминал находится в пределах зоны водителя, если сходство полученного изображения и предварительно сохраненного изображения соответствующего положения превышает заданный предел, и
блок перехода в режим ожидания, выполненный для переключения мобильного терминала в режим ожидания, если он находится в пределах зоны водителя, причем модуль оценки изображений включает в себя:
подмодуль поиска объекта, выполненный для осуществления анализа данных на изображении и поиска объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения, превышает первый предел,
подмодуль определения схожести местоположения, выполненный для осуществления определения схожести местоположения объекта, сходство формы которого с формой основного контрольного объекта на предварительно сохраненном изображении соответствующего положения превышает первый предел, с помощью основного контрольного объекта, и
подмодуль определения схожести изображения, выполненный для определения схожести полученного изображения и предварительно сохраненного изображения соответствующего положения, на основании схожести формы и местоположения.
7. Оборудование по п. 6, отличающееся тем, что оборудование также включает в себя
блок сбора данных о скорости, выполненный для получения данных о скорости движения мобильного терминала.
8. Оборудование по п. 7, отличающееся тем, что блок сбора данных о скорости включает в себя
модуль GPS, выполненный для получения данных о текущем местоположении мобильного терминала по меньшей мере два раза за предустановленный цикл, и получение данных о скорости движения мобильного терминала в соответствии с местоположением.
9. Оборудование по п. 7, отличающееся тем, что блок сбора данных о скорости включает в себя
модуль связи с компьютером, выполненный для получения данных о скорости движения автомобиля с помощью бортового компьютера в качестве скорости перемещения мобильного терминала.
10. Оборудование по п. 6, отличающееся тем, что блок оценки зоны водителя также включает в себя
модуль определения района, выполненный для определения района, где находится водитель, с помощью используемой сети на основе кода страны в системе мобильной связи и кода сети мобильной связи, и
модуль оценки изображений, настроенный на сравнение изображения, полученного с помощью передней камеры, с видом слева и спереди; и сравнение изображения, полученного с помощью задней камеры, с видом слева и сзади, если район, где находится мобильный терминал, является районом с правосторонним движением, сравнение изображения, полученного с помощью передней камеры, с видом справа и спереди, и сравнение изображения, полученного с помощью задней камеры, с видом справа и сзади, если район, где находится мобильный терминал, является районом с левосторонним движением.
11. Оборудование по п. 6, отличающееся тем, что блок оценки зоны водителя включает в себя
сенсорный модуль оценки, выполненный для определения того, находится ли мобильный терминал в пределах зоны водителя с помощью датчика в автомобиле.
| US 2012214463 A1, 23.08.2012 | |||
| RU 2008143061 А, 20.05.2010 | |||
| WO 2008027076 A1, 06.08.2008 | |||
| АВТОМОБИЛЬНАЯ КОМПЬЮТЕРНАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ, ОГРАНИЧИВАЮЩАЯ ИСПОЛЬЗОВАНИЕ РАДИОТЕЛЕФОНОВ В ДВИЖУЩИХСЯ АВТОМОБИЛЯХ | 2002 |
|
RU2271286C2 |
| US 2010297930 A1, 25.11.2010 | |||
| US 2007026850 A1, 01.02.2007 | |||
| US 2003096594 A1, 22.05.2003 | |||
| WO 2010042545 A2, 15.04.2010 | |||
| US 2012001843 A1, 05.01.2012 | |||
| WO 0225970 A1, 28.03.2002. | |||

