Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к датчикам гравитации и более конкретно к обнаружению небольших вариаций гравитационного поля, индуцированных возмущениями подповерхностных напряжений, и еще более конкретно к применению таких датчиков в разведке на залежи углеводородов.
Уровень техники
До сегодняшнего дня вариации силы тяжести определяли с использованием подвешенных больших массивных тел порядка килограммов. Считалось, что такие массивные тела должны быть большими, поскольку сила тяжести является слабейшей из известных сил. Сравнительно недавно была предложена атомная интерферометрия и, в частности, акселерометры с использованием интерферометрии в качестве гравиметрических зондов. См., например, статью Б.М. Андерсон, Дж.М. Тейлор и В.М. Галицкий. «Интерферометрия с использованием синтезированных калибровочных полей» (В.М. Anderson, J.M. Taylor and V.M. Galitski, "Interferometry with synthetic gauge fields", Physical Review A, vol. 83, 031602(R), 2011).
Этим устройствам присущи практические ограничения. Устройства, использующие большие массы, могут определять только большие вариации гравитационного поля. Необходимо решить целый ряд сложных технических проблем, чтобы сделать интерферометры практичными для работы в полевых условиях. К таким требованиям относятся, в частности, охлаждение и поддержание температуры атомов около абсолютного нуля и устранение нежелательных инерциальных эффектов. Таким образом, было бы весьма желательно иметь устройство, которое могло бы определять относительно небольшие флуктуации силы тяжести, такие как флуктуации, вызванные подповерхностными напряжениями, обусловленными присутствием геологических объектов, и которое было бы удобно использовать при приемлемых температурах, таких как комнатная температура.
Краткое описание чертежей
Фиг. 1 - схема, иллюстрирующая типовой геологический объект, для различения которого может оказаться полезным настоящее изобретение;
Фиг. 2 - блок-схема, иллюстрирующая основные компоненты датчика гравитации и системы обнаружения, способной идентифицировать объекты, потенциально содержащие углеводороды;
Фиг. 3 - подробная блок-схема изображенной на Фиг. 2 системы, показывающей части системы и кабели, соединяющие эти части;
Фиг. 4 - схематичное изображение на основе фотографии, показывающей систему, изображенную на Фиг. 2 и 3, в самолете Cessna Citation 560;
Фиг. 5 - схематичное изображение открытого корпуса датчика и соответствующего модуля обработки сигнала, используемых в системе, показанной на Фиг. 4;
Фиг. 6А - вид сбоку датчика детектора поля напряжений (stress field detector (SFD) sensor), показывающий типовые размеры;
Фиг. 6В - вид с торца изображенного на Фиг. 6А датчика SFD, показывающий типовые размеры;
Фиг. 7А - датчик SFD, в соответствии с другим вариантом осуществления изобретения, вид сбоку в перспективе;
Фиг. 7В - вид с торца датчика SFD, показанного на Фиг. 7А;
Фиг. 8 - схематичное изображение, показывающее вид датчика SFD под микроскопом, иллюстрирующий, как могут быть захвачены атомы при формировании контакта датчика;
Фиг. 9 - схематичное изображение, иллюстрирующее один вариант осуществления настоящего изобретения, являющийся многоконтактным вариантом, где каждый контакт содержит суперпозицию волны захваченной частицы и фононной волны, генерируемой в объеме контакта;
Фиг. 10 - схематичное изображение, иллюстрирующее стоячую волну захваченной частицы и фронт фононной волны в сильно ограниченной области между металлическим штифтом и металлической втулкой Фиг. 6А-7В;
Фиг. 11-13 - примеры сигналов, генерируемых системой, показанной на Фиг. 2-6В, в ходе испытательных полетов для проверки возможностей системы, и более конкретно:
Фиг. 11 - сигнал, полученный для линии испытательного полета, пересекающего газовое месторождение Ladyfern в Британской Колумбии, Канада вдоль линии максимальных напряжений на равнине;
Фиг. 12 - сигнал, полученный на линии второго испытательного полета через газовое месторождение Burnt Timber, Альберта, Канада, с применением такого же датчика, какой использовался при получении сигнала, представленного на Фиг. 11, и вдоль линии максимальных напряжений, но в предгорье;
Фиг. 13 - сигналы, полученные в ходе третьего испытательного полета по линии, пересекающей газовое месторождение Ladyfern в Британской Колумбии, Канада, с применением такого же датчика, какой использовался при получении сигналов, представленных на Фиг. 11 и 12, но в этом случае полет проходил вдоль линии минимальных напряжений;
Фиг. 14 - карта линии разведочного полета, выполненного 14 апреля 2012 г. над нефтяным месторождением La Jarilla в Comodoro-Rivadiva, Аргентина;
Фиг. 15 - сигнал, полученный в ходе испытательного полета по линии в соответствии с картой, изображенной на Фиг. 14, с использованием датчика "Pearl";
Фиг. 16 - сигнал, полученный в ходе испытательного полета по линии в соответствии с картой, изображенной на Фиг. 14, с использованием датчика "String", отличного от датчика "Pearl";
Фиг. 17 - сигнал датчика, иллюстрирующий понятие «амплитуда сигнала»;
Фиг. 18 представляет сигнал датчика с усредненной амплитудой;
Фиг. 19 представляет сигнал датчика, иллюстрирующий понятие геологического перепада;
Фиг. 20 представляет сигнал датчика, иллюстрирующий понятие «частоты» сигнала;
Фиг. 21 представляет сигнал датчика, иллюстрирующий различные тренды (тенденции) изменения частоты;
Фиг. 22 представляет сигнал датчика, иллюстрирующий понятие изменения структуры сигнала;
Фиг. 23 представляет сигнал датчика, иллюстрирующий понятие характера сигнала;
Фиг. 24 представляет сигнал датчика, иллюстрирующий понятие идентификации последовательности.
Предпочтительный вариант осуществления изобретения
Настоящая, заявка описывает квантовое устройство для использования в аэрогеофизической разведке, которое является в достаточной степени стабильным и которое дает согласованные результаты поиска. Таким образом, новые предлагаемые устройство и система способны обеспечить автономную надежность.
Ниже рассмотрены варианты практически реализуемого детектора гравитационного поля. Конкретной областью применения описываемого ниже варианта детектора является обнаружение потенциальных месторождений углеводородов. Как будет подробно показано ниже, геологические напряжения в земной коре в области месторождения углеводородов отличаются от напряжений в областях монолитных горных пород. Описываемый детектор обнаруживает такие различия. В процессе обнаружения потенциальных месторождений углеводородов выяснилось, что описываемые здесь варианты обнаруживают также другие геологические объекты в осадочном бассейне, такие как моноклинали и разломы. Специалисту в рассматриваемой области должно быть также очевидно, что детектор поля напряжений и конкретные варианты, описываемые здесь, имеют, и еще будут иметь множество дополнительных признаков и приложений.
На фиг. 1 представлена схема, иллюстрирующая типовой геологический объект 100, для различения которого может оказаться полезным настоящее изобретение. На схеме показана выбранная в качестве примера область 110 осадочного бассейна, имеющего несколько осадочных слоев 102, 104, 106, 108 и 110, так что эта область содержит участки, имеющие секвенцию 112 сланцевых (глинистых) слоев, окружающую формацию 114 из пористого песчаника, в которой может присутствовать флюид, такой как, например, газ, нефть или вода. В этом примере пористый песчаник и сланцы имеют одинаковую плотность. Равная плотность означает равное ускорение свободного падения. Поэтому гравиметры на основе больших масс дадут один и тот же результат измерений над обеими областями. Однако эти две области имеют разные моды напряжений, как это показано посредством 118, 126, 127 и 120. В глинистых сланцах 112 напряжения распределяются не так как у пористого песчаника 114. Такая разница в упругих (сдвиговых) свойствах между сланцами и пористым песчаником, содержащим значительное количество флюида, порождает аномалии механических напряжений, незаметные для обычных детекторов гравитации, но обнаруживаемые описанными здесь датчиками вследствие изменений колебаний гравитационного поля, связанных с возмущениями подповерхностных напряжений.
I. Подробное описание электронных схем
На фиг. 2 представлена блок-схема, иллюстрирующая основные компоненты датчика гравитации и системы обнаружения, способной идентифицировать объекты, потенциально содержащие углеводороды. Как показано на Фиг. 2, система объединяет датчики 154 детекторов поля напряжений, систему 156 обработки сигнала, систему 160 отслеживания полета самолета и связи, системы 164 и 166 регистрации данных, системы 170 управления качеством, включая системы постобработки данных. Все единицы оборудования являются автономными и соединены одна с другой посредством соответствующих кабелей 155, 161, 158, 157, 167 и 168.
На фиг. 3 представлена блок-схема, показывающая индивидуальные электронные компоненты варианта системы 150, смонтированного на самолете аэроразведки. Вариант 150 содержит первую систему 202 датчиков поля напряжений (SFD), вторую систему 204 датчиков SFD, главную компьютерную систему 214 сбора данных, компьютерную систему 216 отображения в реальном времени и навигационную систему 218 для пилотов. Первая система 202 датчиков SFD имеет комплект датчиков SFD, содержащий шесть датчиков SFD и 2 акселерометра. Все эти датчики размещены в модуле 220 датчиков. Конструкция датчиков и модулей датчиков будет рассмотрена ниже. Первая система 202 датчиков содержит также систему 222 обработки сигналов детекторов SFD и аккумулятор 225. Места заземлений в системе 150 обозначены символами заземления, такими как 226. Вторая система 204 SFD имеет модуль 230 датчиков, содержащий восемь датчиков SFD и шесть акселерометров. Вторая система 204 содержит также систему 232 обработки сигналов детекторов SFD и аккумулятор 235.
Один из вариантов главного компьютера 214 содержит компьютер 290 типа QNX 4.25 для сбора данных вместе с платами и с периферийными устройствами, включая клавиатуру 240, соединенную с входным портом 299 для клавиатуры соединителем 242. Питание компьютера 290 осуществляется от источника 294 питания, получающего энергию от бортовой сети самолета, поступающую в модуль 291 ввода питания в виде напряжения 110 В переменного тока. В состав компьютера 290 для сбора данных могут также входить плата 300 сбора данных, соединенная с портом 250 для ввода данных датчиков, плата 304 сбора данных, соединенная с портом 252 для ввода данных акселерометров, последовательный порт 306 GPS, соединенный с портом 274 GPS Com 1, последовательный порт 308 NMEA / qtalk serial, соединенный с портом 276 GPS Com 2, выход 310 на дисплей пилотов и USB-порт 314, служащий выходом для передачи данных на внешний жесткий диск. Соединитель 242 может представлять собой кабель или беспроводное устройство и позволяет перемещать клавиатуру внутри самолета. Компьютер 214 может содержать: кабельный интерфейс 248, интерфейс 250 для ввода данных типа М6259 2 кГц, имеющий до 16 каналов, используемых датчиком SFD; интерфейс 252 для сбора данных типа М6225 200 Гц для акселерометров; выход 256 дистанционного запуска для синхронизации главного компьютера с другими компьютерами; входной порт 258 от первой системы, соединенный с модулем 222 обработки сигналов датчиков SFD из первой системы; входной порт 260 от второй системы, соединенный с модулем 232 обработки сигналов второй системы; и вход 264 контролирующего устройства акселерометров/аккумулятора. Главный компьютер 214 имеет также в составе модуль 268 GPS, который может содержать: плату GPS 268; антенну GPS 270; порт Com 1 274; порт Com 2 276; порт 280 входа от источника питания постоянного тока; аккумулятор 282 для модуля GPS; и источник 286 постоянного тока 15 В. Модуль 268 GPS работает от аккумулятора 282, заряжаемого от генератора самолета, когда он находится в полете.
Навигационная система 218 для пилотов содержит источник 320 питания постоянного тока 5 В, навигационный интерфейс 324 для пилотов, получающий сигнал от выхода 310 на дисплей для пилотов от компьютера 290, и навигационный дисплей 326 для пилотов, проецируемый на лобовое стекла самолета.
Компьютер 216 отображения в реальном времени содержит портативный компьютер 330, в качестве которого можно использовать компьютер Panasonic CF30 со служебной программой движущейся карты OziExplorer для отслеживания разведывательных полетов и системой WinDaq сбора данных, показывающей форму сигнала датчиков SFD в процессе разведки и служащей также для резервной записи (регистрации) данных. Портативный компьютер 330 может также содержать порт 334 связи, соединенный с портами 304 и 276 связи GPS компьютера 214, USB-порт 326, источник питания постоянного тока для ЗУПВ (RAM) на плате 338, соединенный с источником 346 питания постоянного тока 28 В, и USB-порт 340, соединенный с внешним жестким диском 344. Компьютер 216 отображения в реальном времени может также содержать модуль 350 картирования, который может иметь плату 350 сбора данных, входные порты WinDaq 356 и 358, и USB-порт 354, соединяемый с USB-портом 336 портативного компьютера 330. Эти порты WinDaq 356 соединяют с модулями 222 и 232, соответственно, обработки сигналов датчиков SFD.
Главный компьютер 214 собирает и оцифровывает данные датчиков, данные акселерометров и данные GPS. Платы сбора данных, упомянутые выше, содержат аналого-цифровые преобразователи, которые оцифровывают аналоговые выходные сигналы датчиков SFD и акселерометров. Данные акселерометров выполняют функцию контроля качества. Если ускорение, действующее на датчики SFD, слишком велико, например, 1 g или более, требуется обрабатывать данные особенно аккуратно, чтобы обеспечить необходимое качество данных. Это достигается посредством установления соотношения между данными акселерометров и данными датчиков SFD, выполняемого главным компьютером 214. Главный компьютер 214 также устанавливает соотношение между данными датчиков SFD и данными о местоположении самолета, поступающими от модуля GPS 268. Компьютер 216 отображения в реальном времени генерирует в процессе разведки выходной сигнал, показывающий выходные данные датчиков SFD как функцию времени, форма которого будет подробно обсуждаться ниже. Эти сигналы датчиков SFD могут поступать на дисплей портативного компьютера 330 в реальном времени. Система также устанавливает соотношение между временем и местоположением согласно данным GPS, что позволяет системе отображать на дисплее полет в реальном времени, соотнося время с местоположением самолета. Примеры таких карт будут приведены и рассмотрены ниже.
На фиг. 4 представлено схематичное изображение фотографии, показывающей оборудование системы датчиков разведки «на рабочем месте», на борту самолета 380 типа Cessna Citation 560. Портативный компьютер 330 отображения в реальном времени установлен на верхней поверхности ближайшей стойки 384, тогда как главный компьютер 290 находится непосредственно под ним. Модуль 350 картирования располагается в нижней части этой стойки. В нижней части стойки 384 справа можно видеть кабельный интерфейс 248. Модуль 220 датчиков SFD первой системы виден наверху второй стойки 388, тогда как модуль 230 датчиков второй системы расположен под ним. Модуль 232 обработки сигналов второй системы можно видеть в стойке на один уровень ниже модуля 230 датчиков второй системы. Навигационный модуль 218 можно видеть в кабине пилотов 390 на дальнем конце самолета 380.
На фиг. 5 представлен один вариант открытого корпуса модуля 230 датчиков и многоканального модуля 232 преобразования сигналов. Датчики гравитационного поля представляют собой индивидуальные устройства, смонтированные внутри твердого корпуса 400 с изоляцией от вибраций и ударов. В варианте, показанном на Фиг. 5, эта изоляция от вибраций и ударов представляет собой коврик 410 из силиконового геля. На этом коврике 410 установлены шестнадцать датчиков SFD - 404, 406, 408, 414, 416, 418, 420, 422, 424, 426, 428, 430, 434, 435, 436 и 437, Поверх датчиков SFD 434, 435 и 437 установлены три акселерометра 440, 441 и 442, соответственно, которые, таким образом, тоже опираются на коврик 410. Эти акселерометры измеряют ускорения вдоль каждой из трех взаимно ортогональных осей. Кроме того, еще три акселерометра 444, 445 и 446 смонтированы непосредственно на корпусе 400. Они измеряют ускорения вдоль каждой из трех взаимно ортогональных осей планера самолета. Возможны также многочисленные другие конфигурации датчиков SFD и акселерометров. Одним из свойств различных вариантов часто является избыточность датчиков SFD и акселерометров. В одном из вариантов сигналы от четырнадцати датчиков SFD в двух раздельных системах регистрируют одновременно в дифференциальном режиме, чтобы уменьшить неопределенность при идентификации подповерхностных геологических объектов и устранить нежелательные шумы. В других вариантах двадцать четыре датчика образуют три раздельные системы.
Датчики гравитационного поля согласно настоящему изобретению представляют собой квантовые устройства, реагирующие на флюиды, захваченные структурными и стратиграфическими ловушками, вызванными вариациями подповерхностных напряжений преимущественно в горизонтальном направлении, отсюда термин Детекторы поля напряжений. Предпочтительный вариант такого датчика рассмотрен ниже со ссылками на Фиг. 6А - 10. В зависимости от конструкции датчик представляет собой преобразователь с двумя или тремя выводами, генерирующий изменяющийся во времени электрический сигнал, проходящий через многоканальный модуль обработки сигналов. Выходной сигнал в форме аналогового сигнала напряжения поступает к платам сбора данных, где его преобразуют в цифровой сигнал для представления на дисплее компьютерной системы. Данные можно регистрировать со скоростью 2000 отсчетов в секунду.
На Фиг. 6 представлены вид сбоку (Фиг. 6А) и вид с торца (Фиг. 6В), показывающие подробности одного из вариантов контакта 416 датчика согласно настоящему изобретению. Контакт содержит штифт 450, имеющий покрытие 462, и втулку (шаровидную деталь с отверстием) 454, имеющую первую полусферу 456, диск 458 и вторую полусферу 460. Штифт 450 может быть выполнен из золота или меди, хотя возможно выполнение штифта из других материалов. Покрытие 462 может быть выполнено из оксида серебра, т.е. из Ag2O, хотя оно может быть выполнено также из других оксидов или других диэлектриков. Толщина покрытия 462 может составлять тридцать нанометров или меньше; предпочтительно - двадцать нанометров или меньше; и наиболее предпочтительно - десять нанометров или меньше. Круглая центральная дисковая часть 458 втулки 454 может быть выполнена из меди, хотя возможно применение для этого множества других металлов. Примерные размеры различных частей показаны на Фиг. 6А и 6В. Полусферы 456 и 460 могут иметь ширину 2 мм и могут быть выполнены из сплавов, таких как сплавы олова, никеля, свинца и серебра. В одном из вариантов первая полусфера 456 может содержать 63% Sn (олово) и 37% Рb (свинец), тогда как вторая полусфера 460 может быть выполнена из сплава 96.3% Sn (олово) и 3.7% Ag (серебро). Диск 458 может иметь ширину 1.75 мм. Штифт 450 может иметь длину 25 мм и диаметр 1.45 мм. Диаметр окружностей полусфер 456 и 460 и диска 458 может составлять 3.5 мм. Во время работы на штифте 450 поддерживают потенциал заземления через контакт 504, тогда как на втулку 454 через контакт 458 подают положительное постоянное напряжение VDC. Для изготовления рассмотренных выше компонентов датчика могут быть использованы некоторые другие материалы, такие как никель, углерод, платина, другие металлы и их сплавы. Среди оксидов металлов, которые могут быть применены для покрытия штифта 450, можно указать оксид тантала, оксид алюминия, оксид олова, оксид никеля и другие.
Фиг. 7А и 7В представляют собой вид сбоку в перспективе и вид с торца, показывающие другой вариант контакта 470 датчика. Этот вариант содержит штифт 474 и втулку 476, имеющую диск 478, диск 480 и диск 482. Штифт 474 имеет покрытие 472. Штифт 474 и диск 480 могут быть выполнены из материала с хорошей электропроводностью, такого как золото или медь. Диски 478 и 482 могут быть изготовлены из металлического сплава, такого как сплав олова, никеля, свинца и серебра. Покрытие 472 может быть выполнено из оксида металла, такого как оксид серебра и другие указанные выше оксиды. Контакт 490 штифта может быть изготовлен из меди или другого из указанных выше материалов и может быть заземлен в точке 494. Диск 482 может быть подключен к положительному постоянному напряжению VDC. Величина этого положительного напряжения VDC обычно может находиться в пределах от 6 до 9 В. Во время работы положение штифта 450, 474 в канале втулки 454, 476 регулируют с использованием прецизионного микромеханического механизма управления, который можно подстраивать с помощью нанопозиционирующего устройства с пьезоэлектрическими приводом.
II. Принципы работы
Хотя рассматриваемая здесь система прошла масштабное тестирование путем сравнения с фактическими данными более чем за примерно 15 лет и в систему постоянно вносились усовершенствования на основе этих фактических данных, описание принципов работы системы может быть полезным для более глубокого понимания этой системы. На фиг. 8 представлено схематичное изображение, показывающее контакт 416 датчика под микроскопом, иллюстрирующий, как электрически нейтральные или заряженные частицы 512, 514 могут быть захвачены с образованием активного контакта 416 датчика. Как показано на Фиг. 6А и 6В, датчик 416 содержит втулку 454 и металлический штифт 450. Втулка 454 имеет участки 456 и 460, которые могут быть изготовлены из металлического сплава, и участок 458, который может быть выполнен из металла, такого как медь. Штифт 450 имеет покрытие 462, которое может быть выполнено из оксида металла. Штифт 450 заземляют в точке 504, а втулку 454 соединяют с источником напряжения + VDC в точке 508. Положение штифта 450 регулируют в направлениях, ортогональных его длине, показанных как 520. В процессе регулирования положения штифта 450 электрически нейтральные или заряженные частицы, такие как 512 и 514, могут оказаться подходящим образом захвачены между штифтом 450 и втулкой 454. Когда между штифтом 450 и втулкой 454 приложено электрическое напряжение + VDC, электрический ток генерирует тепло, которое порождает фононы. Частица, такая как 514, может оказаться подходящим образом захвачена в фононном резонансе, образуя электронный контакт между неодинаковыми металлами.
На фиг. 9 представлено схематичное изображение, иллюстрирующее один вариант настоящего изобретения, являющийся многоконтактным вариантом, где каждый контакт содержит суперпозицию волны, такой как 515, захваченной частицы, такой как 514, и фононной волны, такой как 530, генерируемой в резонаторе контакта. Как показано, регулирование 526 захватывает частицу 514 в стоячей фононной волне 530, а регулирование 536 захватывает частицу 533 в стоячей фононной волне 534. Эта захваченная частица заключена в зазоре 500 между оксидным покрытием штифта 450 и внутренней поверхностью 460 втулки 454. На фиг. 10 представлено схематичное изображение, иллюстрирующее ловушку 520, 501 для частицы 514 между металлическим штифтом 450 и металлической втулкой 460.
Управляемый фононной волной резонансный датчик с активным интерфейсом представляет собой систему геофизического датчика, способную обнаруживать небольшие (очень малые, едва различимые) вариации гравитационного поля земли. Благодаря компактной и в высокой степени портативной конфигурации датчик можно легко использовать в приложениях для воздушной разведки, что идеально позиционирует его в качестве быстродействующего и экономичного инструмента для поиска полезных ископаемых на больших территориях. Настоящая разведывательная система спроектирована специально для разведки на нефть и газ. К другим будущим возможным приложениям такой системы относятся поиск месторождений металлов, разведка кимберлита (алмазов), обнаружение залегающих неглубоко водоносных слоев с пресной водой, прогнозирование землетрясений и извержений вулканов, идентификация и тестирование квантовомеханических взаимодействий (явления и процессы), исследование квантовомеханических событий в области общей теории относительности, исследования в области происхождения массы, гравитации и инерции на основе самых фундаментальных физических законов, проверка постулатов общей теории относительности и потенциальных астрономических и астрофизических наблюдений. Однако эти приложения могут потребовать внесения изменений в современные конструкции и выбор материалов, добавления функций управления и выбора подходящих частиц.
Базовые рабочие принципы активного интерфейса основаны на фундаментальном соотношении между механическими напряжениями и гравитацией.
На вертикальную составляющую напряжений в земной поверхности преобладающее воздействие оказывает сила тяжести, действующая на вышележащие пласты. А максимальная и минимальная составляющие горизонтальных напряжений, напротив, значительно влияют на гравитацию по горизонтали. Соответственно, большинство гравитационных аномалий с изменениями ориентации возникают в горизонтальном направлении. Хейес показал, что поля механических напряжений не только вносят изменения в величину силы тяжести, но и связаны в тензорных направлениях (Т-.Дж. Хейес, К.Ф. Тиампо, X. Фернандес и Б. Рундл «Способ использования гравитационного градиента с целью характеризации поля постсейсмических деформаций для конечного разлома» (Т.J. Hayes, K.F. Tiampo, J. Fernandez, and J.В. Rundle, "A gravity gradient method for characterizing the post-seismic deformation field for a finite fault" Geophysical Journal International, vol. 173, pp. 802-805, 2008)). Используя обширные вычисления и модели землетрясений Joshua Tree Earthquake, Хейес показал, что гравитационная градиентометрия покажет такой же профиль, как и модель напряжений для конечного горизонтального смещения. Одно исключение, где напряжения не является следствием градиента силы тяжести, это захваченные флюиды. Когда твердое тело контактирует с флюидом, напряжения сдвига на границе должны быть нулевыми (флюид не может поддерживать сдвиг), но нормальная составляющая напряжений (т.е. перенос) должна быть непрерывной. Влияние сейсмических волн сдвига для захваченных флюидов должно быть идентичным. Поэтому поля напряжений в захваченных флюидах значительно отличаются от таких полей в твердых породах и также вызывают уникальные гравитационные возмущения.
Согласно общей теории относительности все формы энергии являются источниками гравитационного поля, а добавление или вычитание энергии изменяет гравитационный потенциал объекта. Следовательно, гравитирующие тела будут создавать реальные возмущения геометрии своего гравитационного поля в ответ на приложенные механические напряжения. К факторам, создающим механические напряжения, могут относиться нагрев, вращение, сжатие или растяжение, а источник этих факторов может находиться внутри или вне тела.
Датчик согласно настоящему изобретению представляет собой нелинейное устройство, выполненное с возможностью (1) избирательного реагирования на гравитационные аномалии, индуцированные механическими напряжениями; (2) достижения динамического интегрирования сигнала по времени; (3) отбрасывания источников постоянного или медленно изменяющегося гравитационного поля; (4) выполнения этих функций с большой высоты, например от 300 до 6000 м (от 1000 до 20,000 фут) и с высокой частотой (например, 2,000 отсчетов в секунду); (5) обеспечения возможности взаимодействия между классической и квантомеханической областями с помощью интерфейса специальной конструкции. Система с датчиками гравитации использует соотношение между механическими напряжениями и гравитацией для того, чтобы сделать вывод об изменениях в напряженном состоянии в пределах осадочного бассейна и/или в неглубоких слоях земной коры за счет фокусировки на обнаружении незначительных вариаций формы колебаний гравитационного поля, являющихся следствием возмущений механических напряжений. Должно быть ясно, что система датчиков гравитации согласно настоящему изобретению рассчитана на обнаружение аномалий, таких как вариации колебаний, в частотной области энергии гравитации, в отличие от измерений величины ускорения, используемых обычными современными гравиметрами и гравитационными градиометрами. Вследствие этого, система согласно настоящему изобретению представляет собой значительное отступление от известных технологий, используемых в полевых геофизических исследованиях.
Большая «зондирующая масса» неудобна для измерений небольших искажений гравитации при взаимодействии на больших расстояниях. Более того, большая масса имеет маленькую длину волны де Бройля. Масса порядка массы частицы, напротив, имеет большую длину волны де Бройля. Плотность энергии связана с массой, а масса может быть определена в терминах частоты де Бройля (Дж.В.Г. Вигналл, «Предложения по абсолютному атомному определению массы» - J.W. G. Wignall, "Proposal for an absolute, atomic definition of mass", Physical Review Letters, vol. 68, pp. 5-8, 1992; С.-Й. Лен, П.-К. Куан, Б. Эсти, Д. Инглиш, Дж. Браун, М. Хоэнзи и X. Мюллер, «Часы, непосредственно связывающие время с массой частиц» - S.-Y. Lan, Р.-С. Kuan, В. Estey, D. English, J. Brown, M. Hohensee, and H. Muller, "A clock directly linking time to a particle's mass", Science, vol. 339, pp. 554-557, 2013). Поэтому все колебания, испытываемые массой, имеют фундаментальную связь с частотой де Бройля для этой массы.
Когда датчик летит сквозь гравитационное поле с высокой скоростью, его колеблющийся активный интерфейс настроен на конкретную интересующую частоту. Это позволит датчику взаимодействовать с локализованными областями плотности гравитационной энергии в пределах особой геометрии пространства-времени, связанной с конкретными возмущениями подповерхностных напряжений. Возмущения с плотностью энергии, сопоставимой с той, какую внесет датчик в локализованные колебания, интерферируют с заданными колебаниями датчика и инициируют изменения фононной населенности в объемном резонаторе контакта. Таким образом, полученную в результате форму электрического выходного импульса можно использовать для идентификации атрибутов сигнала, указывающих на захваченные флюиды и другие геологические объекты. Кроме того, подповерхностные анизотропные «состояния напряжений» в естественном залегании, связанные с подповерхностными неоднородностями, индуцируют ориентационные эффекты, которые могут быть обнаружены, когда датчик летит по прямолинейному маршруту. Возмущения напряжений, связанные с плавучестью, (направленная вверх сила, создаваемая флюидом и противодействующая весу погруженного объекта) также могут быть идентифицированы на основе картин распределения энергии напряжений и смещений частоты.
Длинноволновые колебания гравитационного поля, такие как колебания, вызываемые возмущениями напряжений, могут быть переданы частицам с соответствующей длиной волны из состава, например, детекторного элемента, состоящего из фононов и захваченной частицы. Описанный выше процесс позволяет эффективный перенос энергии-момента и усиление результирующих эффектов небольших колебаний и искажений поля. Датчик SFD зондирует спектр плотности гравитационной энергии с целью исследования и распознания ассоциированных с захваченными флюидами и другими геологическими объектами изменений напряжений в подповерхностных слоях. Настоящее изобретение использует новый подход к идентификации и описанию гравитационных эффектов, которые невозможно было обнаружить прежде.
Описанное здесь устройство может представлять собой детектор (измерительный преобразователь), управляемый фононной стоячей волной и содержащий объемный резонатор или область слабовзаимодействующего контакта металл-оксид-металл (LONCI-контакт) с низким сопротивлением и сильно ограниченными пространственными областями. Между выводами (контактами) области контакта может быть захвачена корпускулярная, не ограниченная решеткой структура, т.е. компонент частицы (некий рабочий элемент), с которым ассоциирована своя волна. Этот компонент частицы именуется далее Захваченной частицей (Trapped Particle). В отсутствие возбуждения Захваченная частица будет совершать собственные колебания относительно своего равновесного состояния. Однако при правильном возбуждении эта Захваченная частица может вести себя как активный интерфейс, взаимодействующий с фононной стоячей волной при обнаружении локальных гравитационных колебаний или искажений. Связь волны материи, генерируемой Захваченной частицей», и фононной стоячей волны составляет механизм обнаружения гравитации.
Другие квантовомеханические устройства используют «пассивные интерфейсы контактов», в которых барьер контакта образован газом/воздухом, или тонкой пленкой или каким-нибудь другим диэлектриком. Этот барьер характеризуется высоким сопротивлением и обычно работает при экстремально низких температурах. Напротив, датчик с активным интерфейсом может использовать контакты с низким сопротивлением, в которых частицы могут проходить сквозь эти контакты в виде волн, в отличие от контактов с высоким сопротивлением не менее 4,1 кОм, где эти частицы движутся через контакт в виде частиц. Далее, предложенный датчик работает при комнатной температуре и использует активный интерфейс в форме волны-материи, генерируемой колеблющейся Захваченной частицей и связанной непосредственно с фононной стоячей волной. Полученная в результате конфигурация используется для обнаружения малых сильно локальных изменений в колебаниях/направлении гравитационного поля.
Указанный LONCI-контакт работает при смещении постоянным током. При протекании тока через контакт с низким сопротивлением выделяется джоулево тепло. Когда контакт поглощает фононы, они быстро термализуются, что приводит к повышению температуры в области контакта. В результате система датчика испытывает возбуждение и генерирует фононы. Все это ведет в результате к электрон-фононному рассеянию, изменению сопротивления контакта, образованию кулоновской блокады и инициированию туннельного просачивания частиц. Систему настраивают электромеханическим способом (1) для достижения нужного резонанса путем изменения размеров резонатора и/или изменения емкости контакта, (2) для получения когерентной фононной стоячей волны в резонаторе из двух противоположно направленных бегущих фононных волн, (3) чтобы позволить комплексу частицы и волны локально связаться с гравитационным полем, (4) для усиления сигналов и (5) для использования стохастического резонанса. С помощью повсеместных электронных шумов Джонсона-Найквиста (из-за теплового возбуждения носителей заряда), генерируемых в контакте датчика, можно добиться усиления и оптимизации крайне слабых сигналов, получаемых в результате гравитационных взаимодействий. Это также влияет на режим работы датчика.
Когда датчик движется вдоль линии съемки, волна материи, генерируемая Захваченной частицей, связанной с фононной стоячей волной, будет растягиваться, сжиматься или релаксировать в ответ на изменения поля. Изменяющаяся система волны непрерывно воздействует на сопротивление контакта, наблюдаемое в виде напряжения выходного сигнала как функции времени. Это происходит частично из-за электрон-фононного рассеяния с управляемым распределением электрического заряда в области контакта.
Хотя изменение сопротивления очевидно, его причины еще до конца не понятны. Изменением сопротивления потенциально могут управлять следующие процессы: суперпозиция связей полей и волн, фонон-фононная связь, образование кулоновской блокады и туннельное просачивание частиц. Когда напряжение смещения подано, носители заряда могут туннелировать сквозь контакт. Электрическая проводимость изменяется при движении носителей заряда сквозь оксидный слой в соответствии с энергией заряда контакта, тепловой энергией системы, квантованием проводимости и спиновой поляризацией.
Система настоящего датчика калибруется для фокусировки в эффективном окне наблюдений примерно от 0.5 до 1.5 радиальных километров. В таких масштабах эмпирические данные позволяют предположить, что большинство гравитационных эффектов вытекают из взаимодействия с местными тектоническими напряжениями, воздействующими на локальные геологические объекты. В результате, получаемые картины напряжений часто указывают на предполагаемые ловушки с углеводородами и на состояние резервуаров в осадочном бассейне, включая, например, присутствие массивов, ограниченных сбросами, канализированных резервуаров или карбонатных рифов. Некоторые другие картины напряжений могут указывать изменения геологических областей, такие как системы разломов и сбросов, пояса трещин, литологические границы и избыточное давление.
Признаки конкретных вариантов осуществления изобретения
Особенностью описанного варианта осуществления изобретения является то, что применяется динамическое интегрирование сигнала во время движения. Все современные гравиметры и гравитационные градиометры осуществляют статические измерения, т.е. от датчика не требуется находиться в движении, вследствие чего эти приборы (1) неспособны осуществлять динамическое интегрирование сигнала или определять накопление энергии в функции времени; (2) не имеют возможности избирательно реагировать на изменения энергии, индуцированные подповерхностными напряжениями (возмущениями от каждой подповерхностной неоднородности); (3) неспособны выполнять отсчеты сигналов колебаний гравитационного поля с высокой частотой (например, 2,000 отсчетов в секунду); и (4) не имеют возможности идентифицировать присутствие локализованных захваченных флюидов в подповерхностной области.
В одном из объектов изобретения предложена система с датчиком гравитации, содержащая: контакт, содержащий первый металл и второй металл, отличный от первого металла, указанный контакт образует объемный резонатор; частицу, характеризуемую волной де Бройля, так что указанная частица располагается в пределах объемного резонатора; фононную волну в объемном резонаторе, так что волна де Бройля связана с фононной волной; источник питания для подачи электрической энергии на контакт; измерительный элемент, способный измерять сопротивление, напряжение или ток, этот измерительный элемент электрически подключен к контакту и генерирует измеренный сигнал; и систему регистрации для записи измеренного сигнала. В одном из вариантов частица не содержится в структуре решетки. В другом альтернативном варианте система дополнительно содержит акселерометр. В другом альтернативном варианте система регистрации содержит устройство системы глобального позиционирования (GPS). В одном из вариантов осуществления изобретения система дополнительно содержит транспортное средство, способное перемещать систему датчиков. В одном из альтернативных вариантов таким транспортным средством является самолет. Еще в одном альтернативном варианте система регистрации содержит систему картирования для представления местоположения транспортного средства на карте. В одном из вариантов контакт содержит: электропроводную втулку, имеющую продольный осевой канал; и электропроводный штифт с диэлектрическим покрытием, расположенный в продольном канале для формирования электрического контакта. В одном из альтернативных вариантов втулка и штифт выполнены из металла, а диэлектрик покрытия содержит оксид металла. В одном из вариантов этот оксид металла представляет собой оксид серебра. В одном из вариантов втулка представляет собой многослойную конструкцию, имеющую слой меди или золота, выполненный между первым и вторым слоями сплава. В другом варианте источник питания представляет собой источник напряжения в пределах от 3В до 9В.
В другом варианте осуществления изобретения предложен способ обнаружения изменений ориентации или локальных изменений гравитационного поля, связанных с подповерхностными напряжениями, этот способ содержит: создание объемного резонатора; захват частицы в объемном резонаторе; применение к частице электрического поля в объеме резонатора для создания электрического контакта; воздействие на контакт изменениями ориентации или локализованными вариациями гравитационного поля; измерение сопротивления, напряжения или тока через контакт с целью получения измеренной характеристики сигнала для изменений ориентации или локальных изменений гравитационного поля, ассоциированных с подповерхностными напряжениями; регистрацию измеренного сигнала; и анализ сигнала для обнаружения изменений ориентации или локальных изменений гравитационного поля. В одном из вариантов способ дополнительно содержит перемещение захваченной в объемном резонаторе частицы через гравитационное поле. В качестве одной из альтернатив такое перемещение представляет собой перемещение захваченной в объемном резонаторе частицы на транспортном средстве. В другом варианте перемещение представляет собой перемещение захваченной в объемном резонаторе частицы на самолете. В одном из альтернативных вариантов регистрация представляет собой регистрацию измеренного сигнала в функции времени. В другом варианте регистрация содержит регистрацию измеренного сигнала в функции от географического местоположения захваченной частицы в объемном резонаторе. В одном из вариантов анализ содержит анализ амплитуды сигнала, частоты сигнала или характера и картины сигнала.
В одном из вариантов осуществления изобретения предложен способ обнаружения месторождений углеводородов, содержащий: создание датчика гравитации для измерения изменений гравитационного поля; перемещение датчика гравитации в атмосфере или по земле над месторождением углеводородов; измерение изменений гравитационного поля для формирования сигнала изменения гравитации, указывающего на месторождение углеводородов; регистрацию сигнала изменения гравитации; и анализ сигнала изменений гравитации с целью обнаружения месторождения углеводородов. В соответствии с одним из альтернативных вариантов перемещение осуществляется посредством установки датчика гравитации на транспортном средстве и движения этого транспортного средства. В одном из вариантов способ дополнительно содержит отслеживание местоположения транспортного средства, а регистрация содержит запись указанного местоположения транспортного средства. В одном из альтернативных вариантов анализ содержит соотнесение записанного сигнала изменений гравитации с данными о местоположении транспортного средства. В одном из вариантов перемещение содержит установку датчика на самолете и полет этого самолета над месторождением. В одном из вариантов способ дополнительно содержит отслеживание географического местоположения самолета и регистрацию этого местоположения. В другом варианте способ дополнительно содержит представление местоположения самолета на дисплее в реальном времени. В другом варианте такое представление на дисплее содержит представление на экране линии запланированного полета и отклонений от этой линии полета. В другом варианте представление на дисплее включает в себя представление линии запланированного полета и отклонений от нее на лобовом стекле самолета. В другом варианте способ дополнительно содержит контроль поворота (вращения) самолета в горизонтальной плоскости для формирования сигнала поворота, регистрация содержит регистрацию этого сигнала поворота, а анализ содержит использование сигнала поворота для повышения качества сигнала изменений гравитации. В одном из вариантов полет представляет собой полет самолета на высоте от 300 м (1,000 фут) до 6000 м (20,000 фут). В другом варианте способ содержит динамическое интегрирование сигнала изменений гравитации по времени. В другом варианте способ дополнительно содержит отслеживание накопления энергии в сигнале с течением времени. В другом варианте отсчеты сигнала выполняют с частотой 1000 отсчетов в секунду или более.
Предложен способ обнаружения подземных флюидов, находящихся в ловушках (захваченных) под слоем земли, включающий в себя: создание датчика подземных флюидов, способного обнаруживать захваченные подземные флюиды; перемещение датчика в атмосфере или по земле над захваченными флюидами; зондирование захваченного флюида с целью формирования сигнала захваченного флюида, указывающего на присутствие захваченного флюида; регистрацию сигнала захваченного флюида; и анализ сигнала захваченного флюида для обнаружения присутствия этого захваченного флюида. В одном из вариантов перемещение осуществляют, установив датчик на транспортное средство и перемещая это транспортное средство. В другом варианте перемещение содержит установку датчика на самолете и полет этого самолета над месторождением. В другом варианте способ дополнительно содержит отслеживание географического местоположения самолета и регистрацию этого местоположения. В другом варианте способ дополнительно содержит контроль поворота (вращения) самолета в горизонтальной плоскости для формирования сигнала поворота, регистрация содержит регистрацию сигнала поворота, а анализ содержит использование сигнала поворота для повышения качества сигнала гравитационных изменений. В другом варианте полет представляет собой полет самолета на высоте от 300 м (1,000 фут) до 6000 м (20,000 фут). В одном из вариантов захваченный флюид представляет собой углеводород.
Предложен практически удобный детектор гравитационного поля, стабильный компактный, прочный и способный работать при комнатной температуре. Любые части любого из описанных здесь вариантов можно сочетать с любыми частями любого из других вариантов. Различные описанные здесь структуры и процессы могут быть заменены эквивалентными им структурами и процессами; различные этапы (подпроцессы) предлагаемого способа можно, в некоторых случаях, выполнять в другом порядке; либо можно использовать разнообразные другие материалы и элементы. Вследствие этого настоящее изобретение следует толковать как охватывающее все и каждый новый признак или новое сочетание признаков, которые присутствуют в описываемых здесь устройстве с датчиком гравитации и способах или которыми обладают эти устройство и способы.
IV. Примеры результатов обнаружения углеводородов
Для проверки того, что система в соответствии с настоящим изобретением работает, были проведены полеты над несколькими областями, где потенциально возможны месторождения углеводородов, а полученные результаты сравнивались с уже известными данными об этих полях. Первым из этих полей явилось поле карбонатов в материковой Канаде, известное под названием «газовое месторождение Ladyfern» в Британской Колумбии, Канада. Открытое в 2000 г. месторождение Ladyfern по оценкам содержит резервы природного газа в объеме 1,5 триллиона куб. фут (1.5 Tcf - около 42 млн. куб. м). Были выполнены полеты по трем линиям в разных направлениях, чтобы подтвердить связь пористых областей с сигналом датчика. Газовое месторождение Ladyfern заключено в карбонатном барьерном рифе, пористость которого сохранилась в процессах вымывания и доломитизации. Системы разломов и трещин на границах имеют сдвиговую природу. Основываясь только на сейсмических данных, не так легко увидеть доломитизацию и захватывание, хотя прогибы видны четко.
Месторождение Ladyfern представляет собой скопление природного газа, расположенное в стратиграфической ловушке - Девонский риф (Devonian slave point reef). Развитие продуктивной породы-коллектора происходили в результате скрытого дигенеза, именуемого гидротермальной доломитизацией (hydrothermal dolomitization ("HTD")). Считается, что пойменные конусы и антитетические сбросы, связанные с близлежащей системой правосторонних разломов реки Hay River, действовали в качестве проводящих каналов для гидротермальных флюидов. Агрессивная природа HTD-дигенеза породила ряд «прогибов» или «сжатий» в самом рифе и вокруг него, которые хорошо видны по результатам сейсмических исследований.
На Фиг. 11-13 показаны сигналы датчиков, полученные в ходе двух полетов над месторождением Ladyfern и одного полета над газовым месторождением Burnt Timber, Альберта, Канала. На каждом из Фиг. 11-13 показан выходной сигнал датчика в Вольтах как функция времени полета. Выходное напряжение нормировано, чтобы его значение оставалось в пределах между нулем и 1В. Полученные в результате сигналы датчиков указывают на подповерхностные геологические изменения и аномалии, которые являются индикаторами коллекторов, потенциально содержащих углеводороды. Была обнаружена очень сильная корреляция с распределением коллекторов, захватывающих флюиды. На таких месторождениях трудно идентифицировать карбонатные карманы с использованием только сейсмических данных, поэтому предложенная здесь измерительная система датчиков дает хорошее дополнительное подтверждение возможностей коллектора.
На фиг. 11 представлен сигнал 600 датчика, полученный вдоль линии максимальных напряжений над равнинами Британской Колумбии. В точке 602 сигнал начинает расти, указывая на приближающееся геологическое изменение. Острый пик в точке 604 указывает на трещины, создающие напряжения, и геологическое изменение, обозначенное стрелкой 606. Кривую можно лучше понять, если рассматривать ее в целом. На графике видна сильная аномалия в точке 614, ограниченная с обеих сторон однотипными сигналами 608 и 620. В соответствии с правилами интерпретации, которые будут обсуждаться ниже, мы рассматриваем это как резервуар с углеводородами в области 615 с типовыми подходами в областях 610 и 619. В области 618 виден подъем сигнала из аномалии. Область 615 соответствует области пробуренных скважин. Мы может также видеть небольшую аномалию в области 625, обозначенную полоской 626. В этой области бурения не было. В точке 630 мы видим спад сигнала, указывающий, что самолет покинул зону аномалий.
На Фиг. 12 представлен сигнал 630, полученный с использованием того же самого датчика, который был применен при измерениях, показанных на Фиг. 11, но в предгорьях Скалистых гор (Rocky Mountains) и также вдоль линии максимальных напряжений. Здесь на геологические изменения указывает острый пик в точке 632, отмеченный стрелкой 633. Сигнал начинает расти в точке 634 в направлении 636. Обрамляющие структуры 642 и 654 расположены в областях 640 и 658 соответственно. На аномалию 650 указывает «провал» сигнала в точке 646 в области 644. Спад сигнала в области 644 указывает на геологическое изменение, обозначенное стрелкой 660. В целом график сигнала намного более изломан, как показано в точках 636 и 646, что обозначает, что рельеф более раздробленный.
На Фиг. 13 представлен сигнал 670, полученный над той же самой аномалией, как аномалия 614, изображенная на Фиг. 11, но вдоль линии минимальных напряжений. Эта же самая аномалия видна в точке 672 в области 674.
На Фиг. 14, 15 и 16 представлены сигналы, полученные в ходе проведенного в рамках научно-исследовательских работ испытательного полета над нефтяным месторождением "La Jarilla" в Comodoro-Rivadiva, Аргентина. Эта конкретная серия измеренных сигналов приведена для иллюстрации факта, что различные датчики не будут показывать идентичные сигналы. На Фиг. 14 изображен экран дисплея 700, представляемый компьютером 216 картирования. Дисплей 700 показывает месторождение "La Jarilla" в области 707 и несколько меньших месторождений в областях 720 и 722. В ячейке 712 показан идентификационный номер полета, а направление полета указано в позиции 714. Область наблюдений обозначена 710, а ось времени обозначена 714. На Фиг. 15 и 16 приведены одни и те же область наблюдений и временной интервал, но сигнал получен с использованием разных датчиков. При сравнении Фиг. 15 и 16 видно, что локальное геологическое изменение 734 на Фиг. 15 и 750 на Фиг. 16, а также начало аномальной области проявляются по-разному. На Фиг. 15 оно обозначено острым пиком в точке 730, а на Фиг. 16 оно показано в виде увеличения сигнала в точке 752. Локальные геологические изменения 736 на Фиг. 15 и 758 на Фиг. 16 проявляются одинаково в виде небольших пиков 738 на Фиг. 15 и 755 на Фиг. 16. Аномалия показана «провалами» в точках 741 и 742 на Фиг. 15 и одним провалом в точке 762 области 740 на Фиг. 16. Конец аномальной области изображен в точке 746 на Фиг. 15 посредством изменения частоты и сдвига амплитуды. Это изображено также в виде изменения частоты и сдвига амплитуды в пункте 770 на Фиг. 16, хотя это изменение не столь явно выражено. Эти кривые показывают, что важными являются изменения сигналов, а не абсолютные величины этих сигналов. Это станет яснее из приведенного ниже раздела интерпретации сигналов.
V. Работа системы
1. Системы связи и отслеживания самолета по линии полета
Системы связи и отслеживания полета самолета состоят из двух частей. Первая часть представляет собой «систему прослеживания линии полета», предоставляющую оператору на борту самолета и наземной группе возможность прослеживать линию полета и быть уверенными, что самолет летит по заданному курсу. Система обновляет местоположение самолета каждую минуту. Это обеспечивает доступ наземной группы к информации о местоположении самолета с высокой степенью точности. Главной целью системы отслеживания является обеспечение безопасности полетов, а также предоставление возможности инженерам-исследователям и, в будущем, потенциальным клиентам, правительственным и военным агентствам точно прослеживать перемещения самолета во время наблюдательных полетов. Система использует спутниковую систему связи сети «Иридий», обеспечивающую глобальный доступ к данным о местоположении и предоставляющую возможность голосовой связи и передачи данных вне зоны покрытия сотовой связи.
Вторая система отслеживания подключена к навигации GPS и предоставляет обновляемую в реальном времени карту оператору датчиков, который наблюдает за работой бортовой системы контроля качества. Бортовая система Novatel GPS дополнена абонентской службой Omnistar для коррекции данных дифференциальной системы GPS на больших территориях. Такая конфигурация обеспечивает очень высокую точность получения данных о местоположении с погрешностью в пределах +/-2 м.
2. Системы регистрации данных
Для независимой и одновременной регистрации данных используются две компьютерные системы: система QNX с разрядностью 16 бит и система WinDaq с разрядностью 14 бит.Всеми системами управляют через главный компьютер с QNX. В частности, компьютер с QNX поддерживает автоматическую синхронизацию резервного сбора данных путем автоматической сигнализации о начале и конце записи данных в пределах 0.5 с. Более того, компьютер с QNX регистрирует также информацию о местоположении по данным GPS и о высоте полета, визуальные наземные ориентиры и любые другие относящиеся к делу полетные данные, необходимые для правильного контроля качества в конце полета. Данные GPS о высоте используются вместе с предоставляемыми Геологической службой США (USGS) данными цифровых карт рельефа (DEM) в конце полета для вычисления высоты самолета над поверхностью земли. Тем самым обеспечивается, что полет, предпочтительно выполняемый на высоте 3000 м (10,000 фут), проходит в пределах допуска по высоте для датчиков. Однако полеты можно проводить в диапазоне высот от 300 м (1,000 фут) до 6000 м (20,000 фут).
3. Системы контроля качества данных
Система контроля качества объединяет необработанные цифровые выходные данные от компьютера QNX и графическое представление выходных данных от системы сбора данных WinDaq. Поскольку все это аналогично сигналу, используемому для интерпретации, определение качества сигнала может быт произведено в полете. Выходные данные системы GPS реального времени и план полета сравниваются для обеспечения минимальных расхождений. Перпендикуляр к линии полета, являющиеся индикатором того, насколько далеко самолет находится от планового курса полета, контролируют в реальном времени как оператор, так и пилоты. Обычно поддерживают расстояние от плановой линии полета вдоль перпендикуляра в пределах 10 м.
Кроме того, система контроля качества содержит мониторы источников питания, чтобы обеспечить поддержание правильных уровней напряжений питания во время всего процесса сбора данных. Для мониторинга ускорений самолета вдоль вертикальной и двух горизонтальных осей во время сбора данных используются акселерометры.
4. Системы постобработки данных
В конце полета система QNX автоматически передает все данные на внешний диск. Необработанные данные проверяют для обеспечения правильной длины записей. В частности, данные проверяют, чтобы убедиться, что обе системы - QNX и WinDaq, сбора данных зарегистрировали исходные необработанные данные без ошибок.
Необработанные данные в шестнадцатиричном формате обрабатывают для проверки согласованности данных и затем переформатируют для ввода в инженерные рабочие таблицы программы DADiSP. Программа DADiSP представляет собой коммерческие интерактивные графические рабочие таблицы, визуально ориентированный пакет программного обеспечения для представления на дисплее, управления, анализа и презентации научных и технических данных. Она может быть использован для управления, редактирования, предварительного преобразования, трансформации, представления на дисплее и анализа технических данных. Таблицы DADiSP могут обрабатывать и упрощать большие объемы выходных данных, поступающих от измерительной системы (датчиков). Как указано выше преобразованный в цифровую форму выходной сигнал датчика содержит 2,000 точек (отсчетов) в секунду, а продолжительность полета может составлять в среднем 10,000 с, что дает объем данных за один полет порядка 1 Гбайт или более в необработанной форме. Когда данные загружены в таблицы DADiSP, их объем может в среднем превышать 6 Гбайт за один полет. Таблицы DADiSP способны эффективно обрабатывать такие большие объемы данных от двух систем регистрации.
5. Процесс планирования полетов
Весь процесс планирования наблюдательного полета с датчиками начинается с изучения и уяснения следующего:
1. Карты - топографические и авиационные карты заданной области готовят как на бумаге, так и в цифровой форме.
2. Требования сенсорной техники (технологии с использованием датчиков) - для получения надежных, качественных данных необходимо соблюдать определенные параметры. Сюда входят наличие длинных прямолинейных отрезков маршрута, большие радиусы поворота и низкая турбулентность. В качестве эмпирического правила можно указать в одном из вариантов, что минимальная длина прямолинейного отрезка составляет 100 км, минимальный радиус поворота должен быть равен 25 км, а ускорение не должно превышать 1 g
3. Операционная база самолета - выбирают на основе следующих критериев: близость к области разведки, длина взлетной полосы (минимум 1500 м (5000 фут)), наличие топлива (джет А-1 с добавкой «Prist»), средства для планирования полетов, требования обеспечения безопасности, возможности для размещения экипажа и средства связи.
4. Прочие полетные ограничения - сюда относятся как требования надзорных органов, так и географические соображения следующего рода:
- Правила управления воздушным движением, куда входят направления взлета и захода на посадку, процедуры получения разрешений и правила полета по приборам (IFR).
- Разрешения от ВВС, необходимые для полетов в воздушном пространстве, доступ в которое ограничен или запрещен.
- Ограничения военного характера, куда входят враждебные территории (противника), приграничные буферные зоны и ограничения по высоте.
- Географические ограничения, включая горы и границы.
- Преобладающие погодные условия, включая осадки, ветры, штормы и облака.
Перечисленная выше информация используется для начала планирования линии каждого индивидуального полета. Линии полетов планируют в виде последовательности точек маршрута, ограничивающих прямолинейные отрезки, и точек маршрута, ограничивающие участки точно управляемого поворота.
В одном варианте осуществления изобретения для достижения готовности к полету необходимо выполнить следующие шесть процедур:
1. Загрузка данных о точках маршрута в систему управления полетом самолета. Эта система ведет самолет в режиме автопилота по запланированному маршруту с высокой степенью точности.
2. Загрузка данных о точках маршрута в систему отслеживания линии полета для датчиков. Это позволяет оператору датчиков на борту отслеживать продвижение самолета по линии, чтобы убедиться, что самолет летит по правильному маршруту. Эта система обеспечивает также точную информацию о местоположении для собираемых данных.
3. Загрузка датчиков на самолет и калибровка.
4. Представление пилотами плана полета в соответствующий орган управления воздушным движением.
5. Пилоты и оператор датчиков садятся в самолет и выполняют запланированный полет.
6. Оценка данных после завершения полета, чтобы убедиться в их соответствии заданным стандартам качества.
В этом процессе важно понимать, что плавные изменения высоты (в вертикальном направлении) не оказывают вредного влияния на работу датчиков; однако небольшие повороты самолета в горизонтальной плоскости такое нежелательное воздействие оказывают. Шумы, присущие сигналу датчика, в значительной степени происходят из-за вращательного движения самолета.
6. Процесс интерпретации данных
Процедура интерпретации сигнала датчиков обычно выполняется в головном офисе и, в одном из вариантов, содержит три основных этапа. На первом этапе выполняют линейную интерпретацию сигналов датчиков одного за другим. Затем выполняют многоканальное объединение сигналов датчиков. Затем к результатам применяют процедуру окончательного ранжирования и картирования.
Конечной целью процедуры интерпретации сигналов датчиков являются идентификация и определение характеристик этих сигналов датчиков. Процесс интерпретации сигналов датчиков содержит распознавание аномальных картин в сигнале датчиков и отличение их от фона. Ключевой проблемой здесь является достоверное распознавание области аномальных изменений характера сигнала и отличение ее от фонового сигнала с шумами. Процедура интерпретации сигналов датчиков использует различные способы улучшения способности идентифицировать аномалии, включая пространственное подтверждение аномалий по сигналам нескольких датчиков, распознавание специфических последовательностей изменений характера сигнала и независимую идентификацию аномалий несколькими группами исследователей. Для целей интерпретации непрерывно регистрируют сигнал от начала стабильного участка полета и до момента непосредственно перед посадкой. В одном из вариантов важно «поймать» относительные изменения характеристик сигнала «базовой линии» от каждого датчика на протяжении всего полета. Это позволяет распознавать нормальные фоновые сигналы и изменения специфичных картин и мод.
Для того чтобы потенциальная аномалия стала предметом для интерпретации, она должна проявиться на нескольких датчиках. Использование нескольких датчиков играет важную роль в контроле качества. Для того чтобы потенциальная аномалия подверглась дальнейшему анализу, она должна быть независимо обнаружена в одном и том же месте пространства по меньшей мере двумя независимыми группами интерпретаторов. Кроме того, во всех случаях необходимо появление в конкретной последовательности.
Ключевой частью процесса интерпретации является распознавание трендов и изменений характера фонового сигнала и идентификация «мод» датчика. Под модой здесь подразумевают долговременный тренд изменений сигнала, распознаваемый для конкретного датчика.
Характер сигнала датчика считается аномальным в области, где он соответствует идеализированной картине или последовательности откликов, про которые известно, что они коррелированны с геологическими изменениями в подповерхностных слоях. К таким изменениям относятся развитие коллектора, заполненного флюидом, или существование механизмов структурных или стратиграфических ловушек. Хотя сигнал датчика может указывать на присутствие захваченных флюидов, на сегодня невозможно отличить углеводороды от воды.
Аномалии могут существовать в виде точечных изменений картин сигналов и часто указывают на значительные изменения в геологии. Области аномалий содержат изменения сигнала с ограниченными началом и концом и должны иметь распознаваемые форму, последовательность, изменения характера или картину. Аномалии в сигнале датчика гравитации часто распознаются по изменениям частоты для разных размеров окна прокрутки, изменениям трендов для разных длин окна, а также по изменениям величины и крутизны кривой сигнала в пределах некоторой области.
Правильное распознавание «изменений» является сложным процессом. По большому счету процесс усложняется существованием нескольких фоновых мод для каждого датчика. Развитие характера аномалии будет зависеть от фоновой моды. Кроме того, характер сигнала является относительным; начальные условия будут влиять на последующий отклик датчика. Например, пересечение большого разлома может замаскировать меньшую аномалию, расположенную вплотную к этому разлому.
Выходными результатами процесса интерпретации данных датчиков является карта перспективности, показывающая рекомендованные зоны, описывающие пространственную протяженность коллекторных участков геологической аномалии в области разведки с использованием датчиков.
Последующий раздел, охватывающий Фиг. 17-24, представляет собой базовое описание наиболее важных принципов интерпретации данных датчиков SFD с использованием примеров идеальных или близких к идеальным откликов датчиков. На каждой из Фиг. 17-24 приведен график сигнала напряжения, отсчитываемого по оси ординат, как функции времени, отсчитываемого по оси абсцисс. Настоящее описание предназначено для введения специалиста в рассматриваемой области в процесс интерпретации данных с датчиков. Представлены наиболее распространенные и общие атрибуты и последовательности аномалий. Все главные аномалии могут быть идентифицированы с применением одного из последующих обобщенных принципов интерпретации, а множество менее значимых аномалий может быть идентифицировано посредством расширения, следствий или группирования этих принципов. Поскольку датчики могут вести себя стохастически, настоящее описание может оказаться неприменимым ко всем датчикам. Это описание фокусируется на принципах, применимых к нескольким основным датчикам. Рассматриваемые принципы могут быть расширены с некоторыми вариациями на другие датчики. Однако следует понимать, что может быть желательно изучить отклик каждого датчика индивидуально с использованием эмпирических данных. Существует множество небольших вариаций этих примеров, которые могут изменять или не изменять идентификацию аномалий. Для достижения указанной выше цели упор в настоящем документе будет сделан на подробном визуальном изучении форм сигналов, хотя в процессе интерпретации могут быть применены разнообразные способы обработки сигналов.
А. Атрибуты сигналов, используемые при интерпретации данных датчиков SFD
простой двумерный график напряжения как функции времени, а это в свою очередь предполагает, что каждый из перечисленных выше атрибутов может быть представлен конкретным поведением выходного напряжения датчика в функции времени. Поэтому этот раздел настоящего документа пытается описать каждый из указанных атрибутов применительно к процессу интерпретации данных датчиков SFD. Важно отметить, что атрибуты датчика SFD не определены в абсолютных величинах. Каждый из последующих терминов/атрибутов относится к последовательности, наблюдаемой в «плавающий» период времени, номинально порядка 10-50 с.
I) Амплитуда
Термин «амплитуда» применительно к датчику SFD означает изменение наблюдаемой средней величины выходного напряжения этого датчика SFD в течение некоторого промежутка времени. Здесь нет фиксированного определения продолжительности промежутка времени, используемого для определения средней величины выходного напряжения, равно как не требуется, чтобы все эти промежутки времени имели одинаковую продолжительность. На Фиг. 17 показаны выходные напряжения и воспринимаемые средние значения этих выходных напряжений в последовательности промежутков времени. В секциях А и В не видно изменений этих средних значений, показанных стрелками 802 и 803; однако эти две области можно различать на основе остальных атрибутов: частоты и характера сигнала. В разделе С произошло изменение амплитуды, показанной стрелкой 806. Эта секция может быть классифицирована в качестве переходного периода от А и В к D. Термин амплитуда, а также величины и понятия, определяемые на ее основе, такие как изменения амплитуды, базовая линия напряжения и т.п., должны, таким образом, относиться к величине напряжения, представленной стрелками 802, 804, 806 и 808 и равной 0.7 В для секций А и В, 0.65 В для секции С и 0.55 В для секции D, а не к величине амплитуды в дискретный момент времени, такой как 0.69 V на момент, соответствующий метке времени 6475. Амплитуда и тренды ее изменения, таким образом, могут быть непосредственно определены на основе средней величины напряжения сигнала в любом конкретном временном окне и могут играть важную роль в распознавании и ранжировании аномалии. С привязкой к предыдущему примеру, показанному на Фиг. 17, вычисление скользящего среднего с использованием промежутков времени 5 с при той же самой общей продолжительности сигнала дает кривую 810, представленную на Фиг. 18. Хотя такое скользящее среднее полезно при идентификации интервалов основных трендов, в секциях D и Е оно «затемняет» тренды изменения напряжения базовой линии во временном окне. Эти тренды часто играют роль в ранжировании аномалий сигналов датчиков SFD. В связи с этим, в рассматриваемом варианте скользящее среднее нельзя считать наилучшим способом анализа данных.
На Фиг. 19 приведен пример перепада 820 уровней сигнала 812 датчика SFD. Этот перепад является примером внезапного резкого изменения амплитуды между первой областью 814 и второй областью 818 и может сопровождаться или не сопровождаться изменением картины моды/фона. Перепад уровней часто используется для интерпретации контакта датчика от одной системы настроек к другой - идентификация этих точек в общем случае применяется для определения начала/конца последовательностей сигналов, используемых для определения аномалий.
II) Частота
Термин «частота» применительно к датчикам SFD означает число наблюдаемых значимых перепадов с полным размахом сигнала (Ymax-Vmin) в течение некоторого промежутка времени. Значимость определяется на основе сравнения с формой сигналов до и после интересующего промежутка времени. Нет какого-то фиксированного определения промежутка времени, используемого для определения средней величины выходного напряжения, равно как и не требуется, чтобы все такие промежутки времени имели одинаковую продолжительность. В большинстве случаев распознанное изменение или сдвиг частоты должны иметь продолжительность более 10 с (в зависимости от текущей скорости летящего самолета), чтобы его можно было считать пригодным с точки зрения интерпретации данных датчиков SFD. Рассмотрим сигнал 830, показанный на Фиг. 20. Области А и F соответствуют определению характеристики высокой частоты (высокочастотных), рассмотренному ранее, тогда как области С и D будут считаться низкочастотными областями. Область G может считаться примером сигнала «компактной» моды и в этом случае понятие частоты применительно к сигналу датчика SFD не уместно. Идентификация аномалий для этой моды будет происходить главным образом на основе амплитуды и характеристик картины (сигнала). В заслуживающей особого внимания области Е выделены четыре подобласти а, b, с и d. В этих подобластях разности Vmax-Vmin и число раз, когда происходит конкретное изменение, описываемое событием «перепада Vmax-Vmin», при переходах от а-b, b-с и c-d, будет соответствовать определению высокой частоты и более уместно может рассматриваться в качестве изменения частоты при переходе от A-B-C-D к Е. Следовательно, только область Е будет считаться имеющей высокую частоту, значимую с точки зрения идентификации аномалий.
Сигнал 840 на Фиг. 21 показывает переход от низкочастотной области (А) к высокочастотной области (В) и в конечном итоге к области «компактной» моды (С). Вполне очевидно, что область В является наиболее плотной частью сигнала. Понимание события, описываемого изменением средней величины Vmax-Vmin, может быть упрощено путем указания двух следующих моментов: оно представляет изменение от небольшой величины Vmax-Vmin к большой величине Vmax-Vmin при переходе от А к В; и частота события с большой величиной Vmax-Vmin намного выше в области В. Можно отметить, что событие обратного (от высокой к низкой величине Vmax-Vmin) перехода в такой же степени применимо к интерпретации и идентификации аномалий. Это является прямым следствием оригинального наблюдения, что одиночные события и изменения выходного сигнала датчика SFD в общем случае значения не имеют и только сохраняют величину, если являются частью общего процесса развития сигнала. Поэтому Частота и тренды изменения Частоты распознаются непосредственно по возникновению и регулярности (или отсутствию таковой) изменений напряжений сигнала со значимым стандартным отклонением в любом конкретном временном окне, и играют важную роль в идентификации и ранжировании аномалий.
III) Характер и картина
Изменение характера сигнала датчика SFD может означать возникновение большого числа разнообразных событий. Изменения характера могут быть очень приблизительно связаны с изменениями средней величины выходного напряжения, хотя это и не всегда так. В общем виде, изменение картины выходного сигнала датчика SFD наблюдается в виде сдвига или изменения последовательности регулярно происходящих событий сигнала. Эти события представляют собой сочетания сдвигов амплитуды и частоты, как это было описано выше. Большинство таких различимых изменений картины получают на основе обзора предыстории и анализа шаблонов. Изменение характера в общем случае подразумевает изменение общей формы сигнала, характеризуемой амплитудой, частотой, эволюцией огибающей и т.п. Конкретная форма сигнала, содержащая такие изменения характера, визуально заметна на графике сигнала датчика SFD. Среди событий сигнала датчика SFD, ассоциированных с изменениями характера, можно указать: Изменение или сдвиг тренда амплитуды сигнала; Изменение или сдвиг характера развития сигнала - например,' сигнал, показывающий только положительные отклонения над воспринимаемой базовой линией, переходит в состояние, когда он показывает и положительные, и отрицательные отклонения; Изменение или сдвиг картины сигнала - например, сигнал, показывающий высокочастотный тренд базовой линии, переходит к сигналу с низкочастотным трендом базовой линии или сигналу с переменным частотным трендом; Изменение или сдвиг огибающей сигнала - например, сигнал, проявляющий циклическое/периодическое поведение переходит к более дискретному развитию. Таким образом, изменения характера сигнала осознаются непосредственно как последовательность сочетаний частотных и/или амплитудных характеристик, описанных ранее, в любом конкретном временном окне и играют важную роль при распознавании и ранжировании аномалий. Некоторые изменения картины сигнала иллюстрирует сигнал 850, приведенный на Фиг. 22. По стрелке 856 видно, что напряжение базовой линии увеличивается при переходе от области 854 к области 860. Кроме того, в этот момент тип отклика меняется на высокочастотный с U-образным развитием формы сигнала, конкретнее - появились U-образные участки 861 и 862, сопровождаемые высокочастотными участками, такими как 863. Далее, из сравнения сигналов по обе стороны от стрелки 856 можно видеть, что диапазон отклика изменяется от расположенного главным образом над базовой линией к расположенному по обе стороны от базовой линии.
На Фиг. 23 приведено несколько изменений характера сигнала, значимых для интерпретации сигнала. Напряжение базовой линии для сигнала в области 867 показано уровнем 868. Напряжение базовой линии для сигнала в области 869 показано уровнем 870. Очевидно, что здесь имеет место изменение характера, состоящее в снижении напряжения базовой линии. Можно видеть, что нисходящее развитие сигнала в области 867 изменяется на высокочастотное только восходящее развитие в области 869, что в результате образует «провал» в области 866. На Фиг. 23 также очевидны изменения диапазона отклика от расположенного главным образом ниже базовой линии в начале графика к расположенному по обе стороны от базовой линии в области 869 и затем обратно, на высокочастотном сигнале с нисходящим трендом в области 872. Это все примеры изменений характера сигнала.
В. Идентификация последовательности
Начальным пунктом процесса интерпретации сигнала датчика SFD является определение начала и конца применимых временных окон, т.е. меток времени в точках, где можно наблюдать и/или зафиксировать изменения частоты, амплитуды или характера/картины. Идентификация этих временных окон может быть полезной при установлении общих последовательностей качества сигнала, которые могут быть в конечном итоге использованы для распознавания аномалий. Распознавание аномалии и затем степени ее интенсивности будет зависеть от типа и последовательности изменений атрибутов, наблюдаемых в пределах этих временных окон и в их ближайшем окружении. Рассмотрим последовательность сигнала, показанную на Фиг. 24. Она разбита на последовательность временных окон - А, В и С, выделенных на основе изменения или сдвига одного из главных атрибутов сигнала датчика SFD. Переход от области А к области В определен следующими событиями. Как показывает сравнение уровней 876 и 872, имеют место изменение амплитуды базовой линии и изменение характера сигнала, состоящие в том, что сигнал меняет как тренд, т.е. «восходящий» тренд на «плоский», так и картину, т.е. направленность отклонений относительно базовой линии. Из сравнения сигнала 874 с сигналом 880 видно также изменение частоты сигнала. Аналогично, сдвиг от области В к области С определен следующими событиями: изменением амплитуды базовой линии, как показано стрелками 872 и 886; и изменением частоты сигнала, как видно из сравнения сигналов 880 и 884. Определение этих последовательностей полезно для интерпретации сигнала с точки зрения аномальной или неаномальной формы, которое после будет связано с общим ранжированием области/областей.
Следует особо отметить, что форма сигнала представляет собой последовательность непрерывных изменений, где такие же атрибуты, какие определяют аномальные области, могут определять неаномальные области. Развитие сигнала на протяжении времени составлено из ряда изменений индивидуальных атрибутов, однако главным различием между областью и формой сигнала, отмеченными как аномальные, в сравнении с областью или формой сигнала, не считающимися аномальными, является последовательность изменений для индивидуальных атрибутов. Развитие сигнала в пространственном интервале будет в общем случае составлено из ряда возможных последовательностей изменений атрибутов, а начальной точкой обычно является идентификация начала и конца конкретной подсекции развития сигнала. Эта процедура называется определением «временных окон».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИИ | 1995 |
|
RU2144686C1 |
| СПОСОБ ПОИСКА И КОНТРОЛЯ УГЛЕВОДОРОДОВ КОМПЛЕКСОМ ГЕОФИЗИЧЕСКИХ МЕТОДОВ | 2020 |
|
RU2758148C1 |
| ГРАДИЕНТОМЕТР | 2011 |
|
RU2571164C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ЖИДКИХ УГЛЕВОДОРОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2176094C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| СПОСОБ НАВИГАЦИИ ПО ВЕКТОРУ СИЛ КОРИОЛИСА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2775858C2 |
| ПОСТОЯННЫЙ СКВАЖИННЫЙ РЕЗОНАНСНЫЙ ИСТОЧНИК | 2004 |
|
RU2330309C2 |
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО КОЛИЧЕСТВЕННОГО ОБНАРУЖЕНИЯ УТЕЧЕК ФЛЮИДА В ТРУБОПРОВОДЕ ПРИРОДНОГО ГАЗА ИЛИ НЕФТИ | 2004 |
|
RU2362986C2 |
| СПОСОБ КОНТРОЛЯ РАЗРАБОТКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ ПО МИКРОСЕЙСМИЧЕСКОЙ ЭМИССИИ | 2006 |
|
RU2309434C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЙ СВОЙСТВ МАТЕРИАЛА | 2008 |
|
RU2488088C2 |

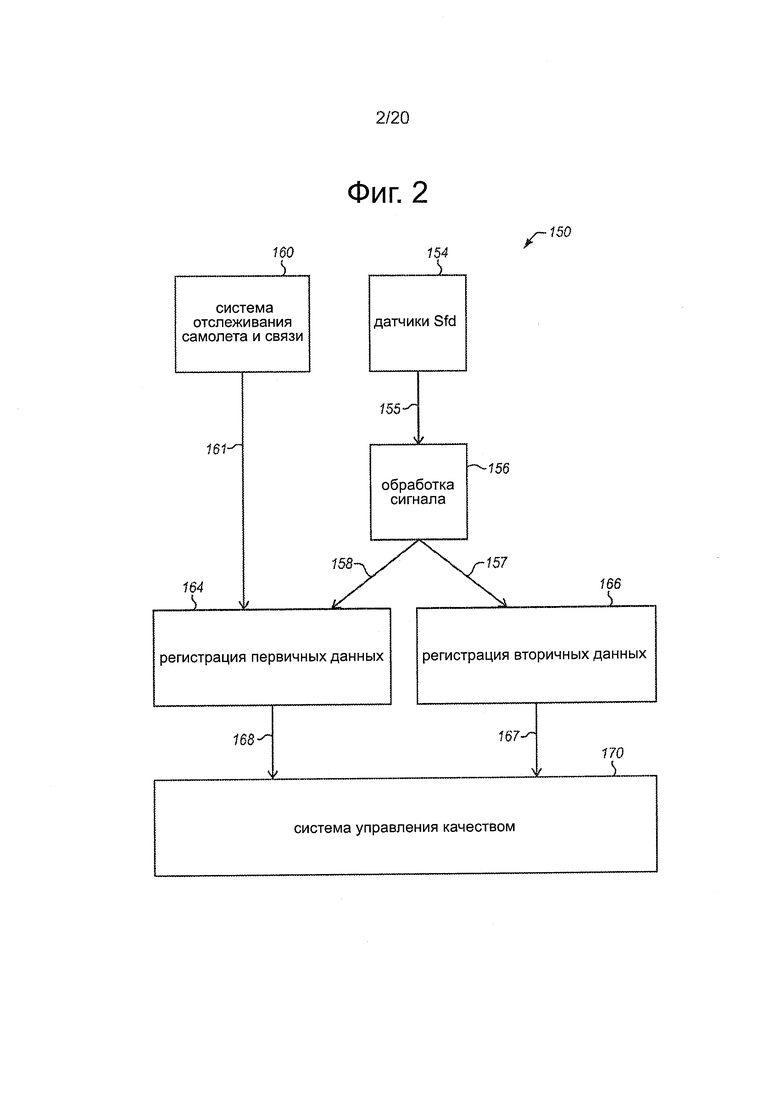
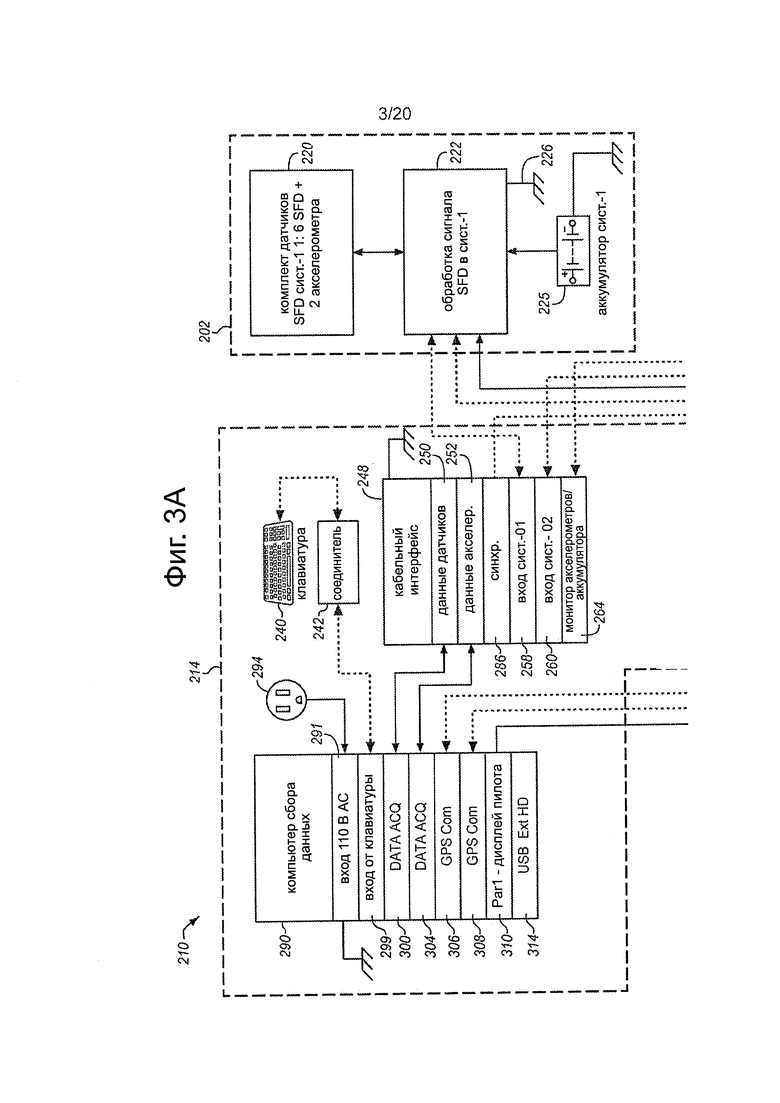
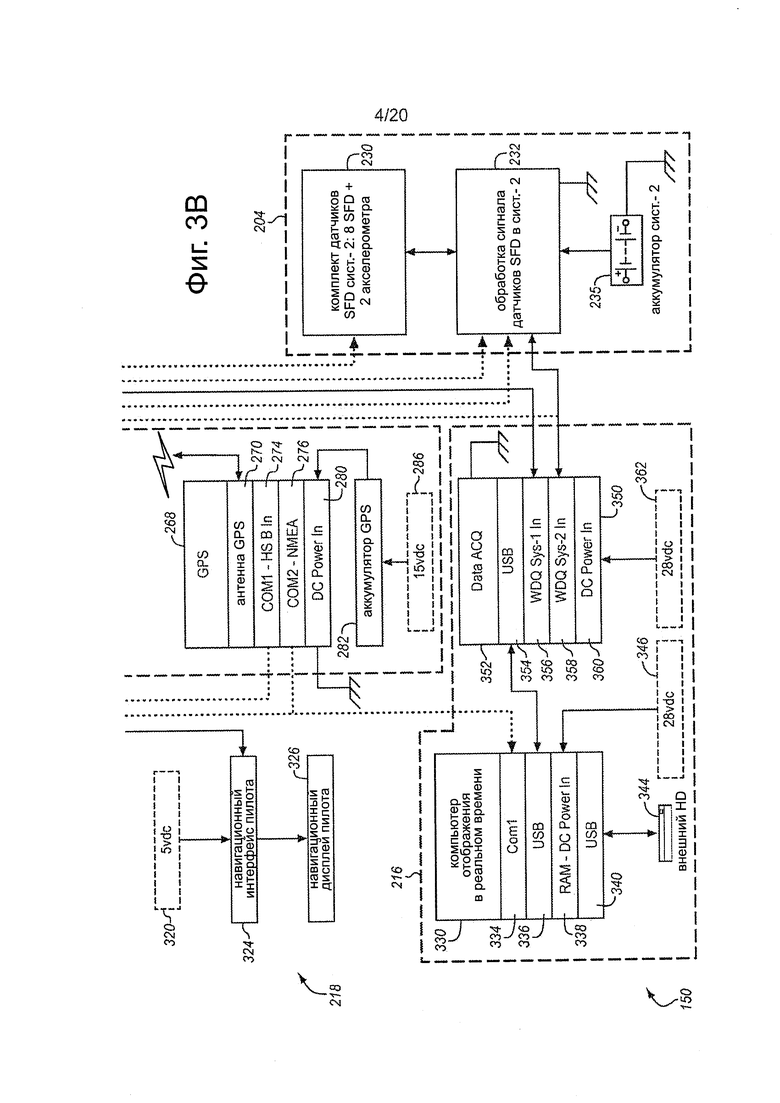



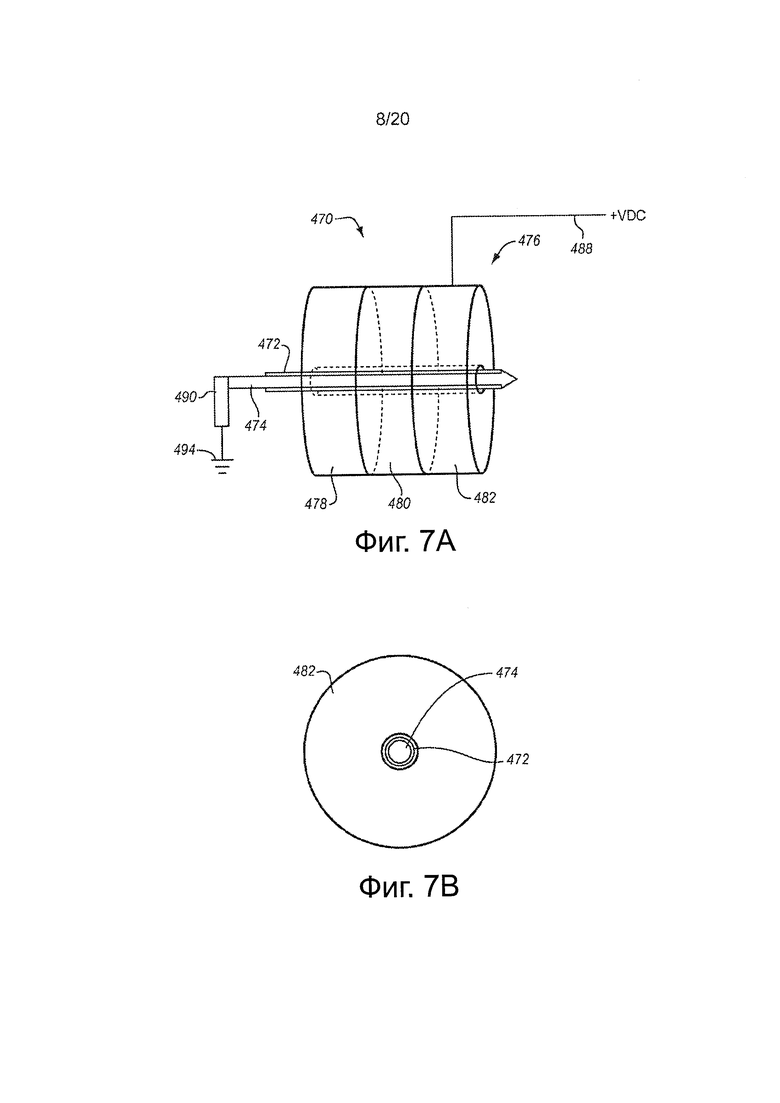
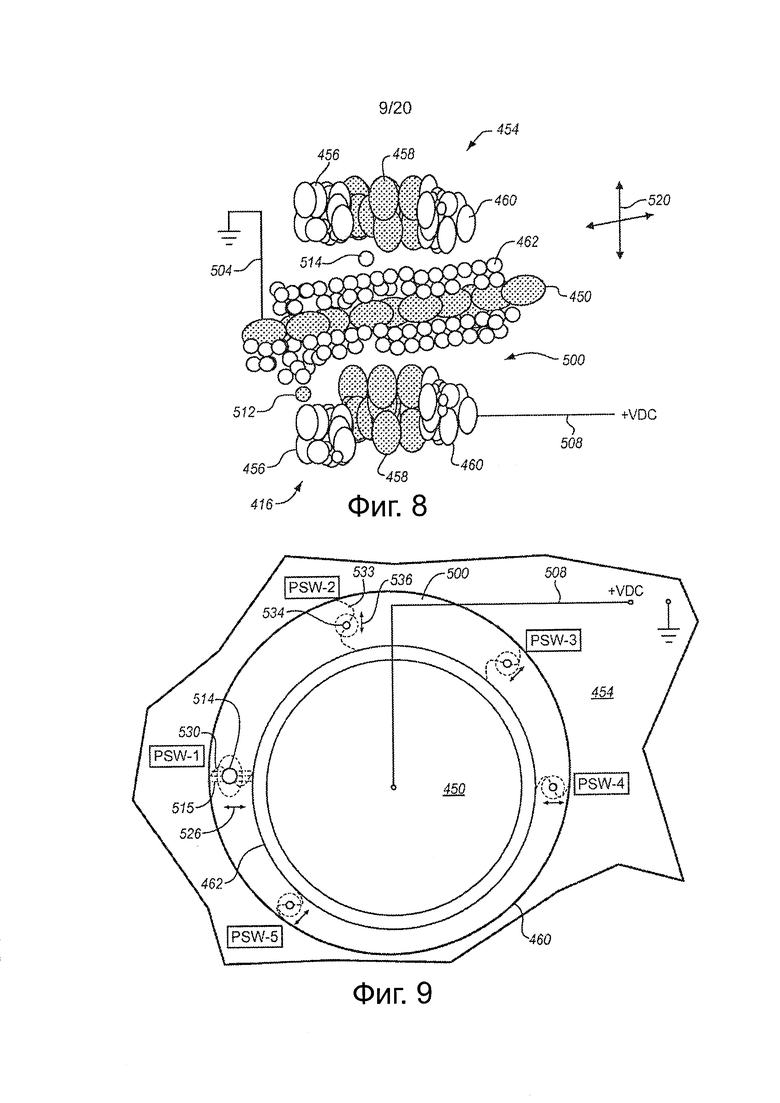
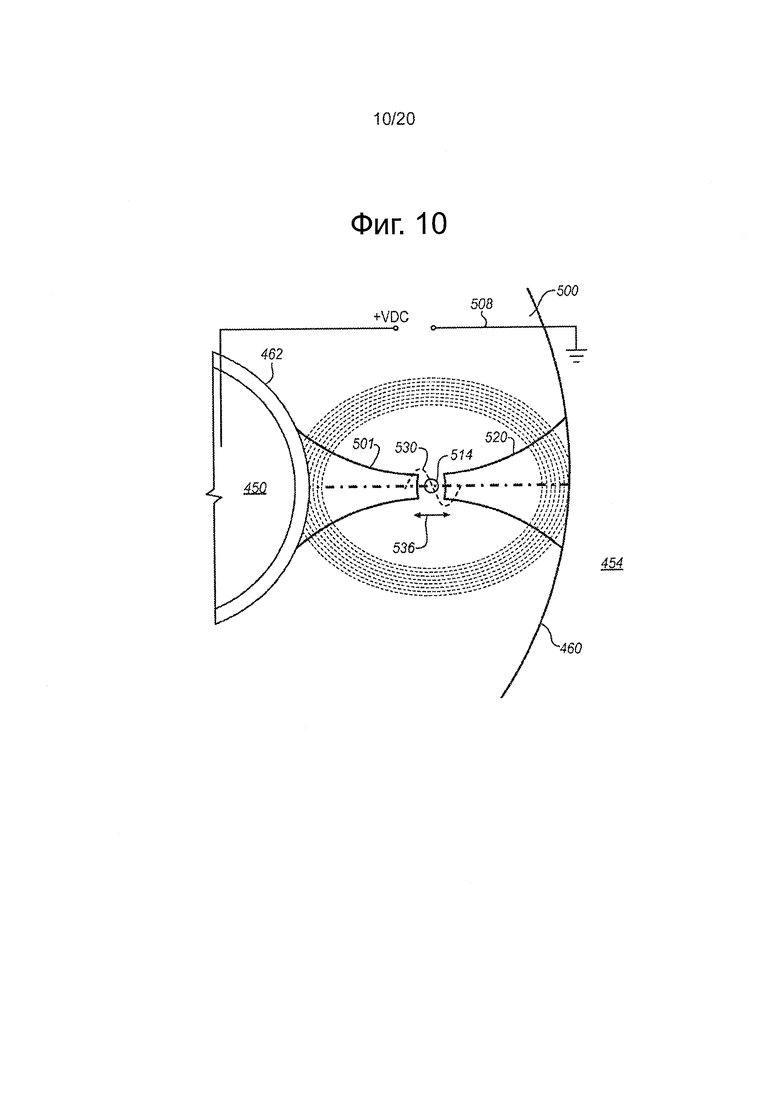
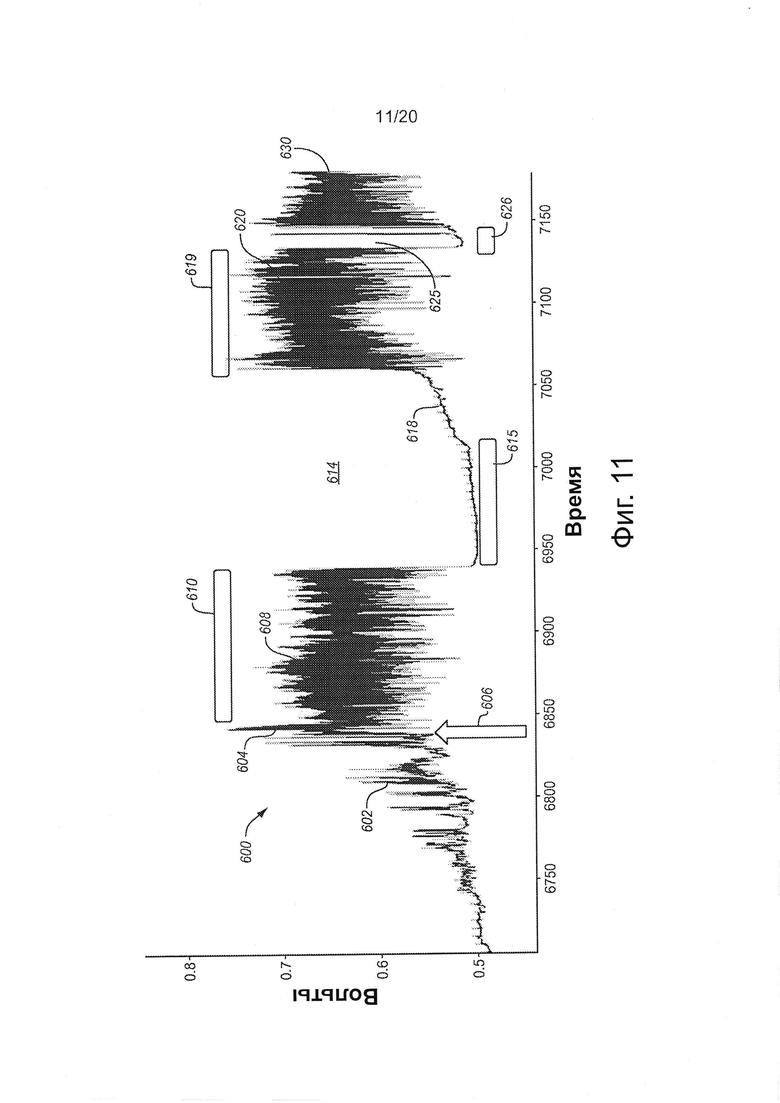
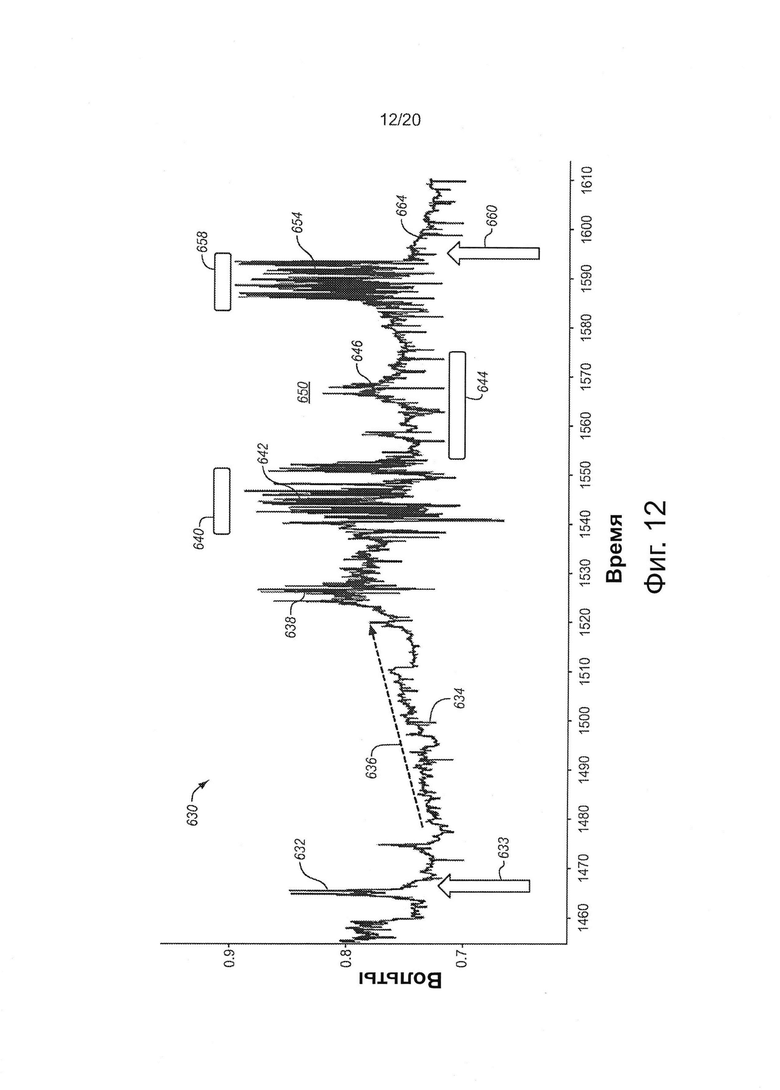
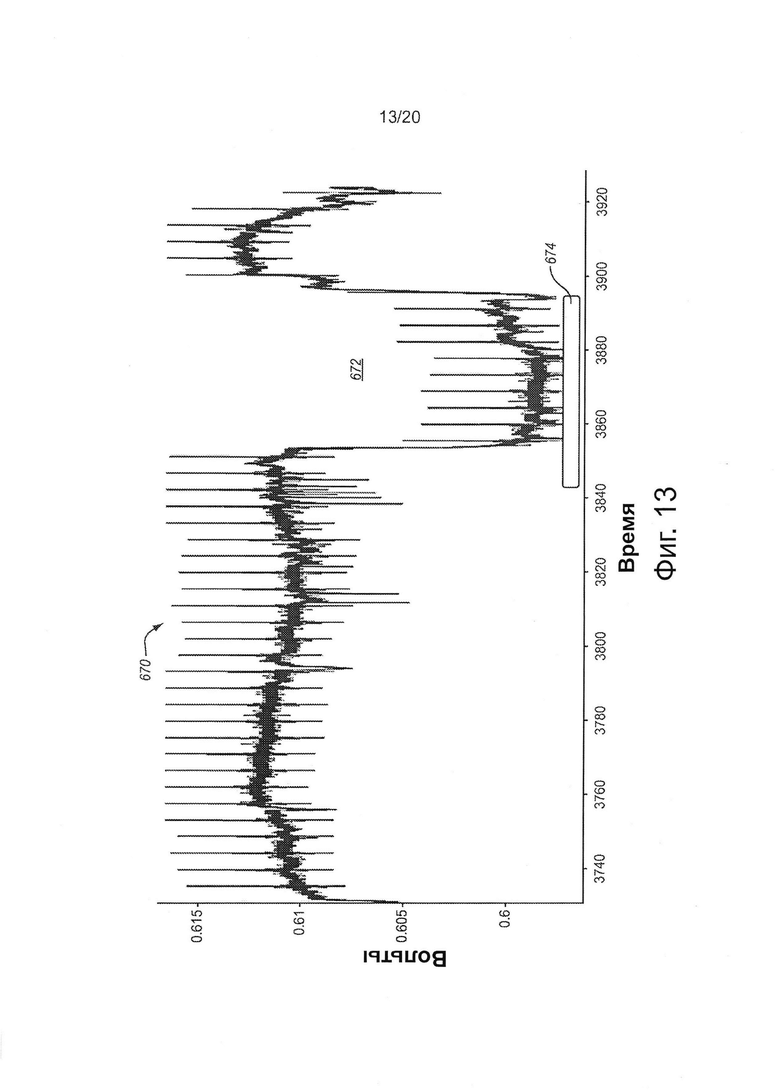

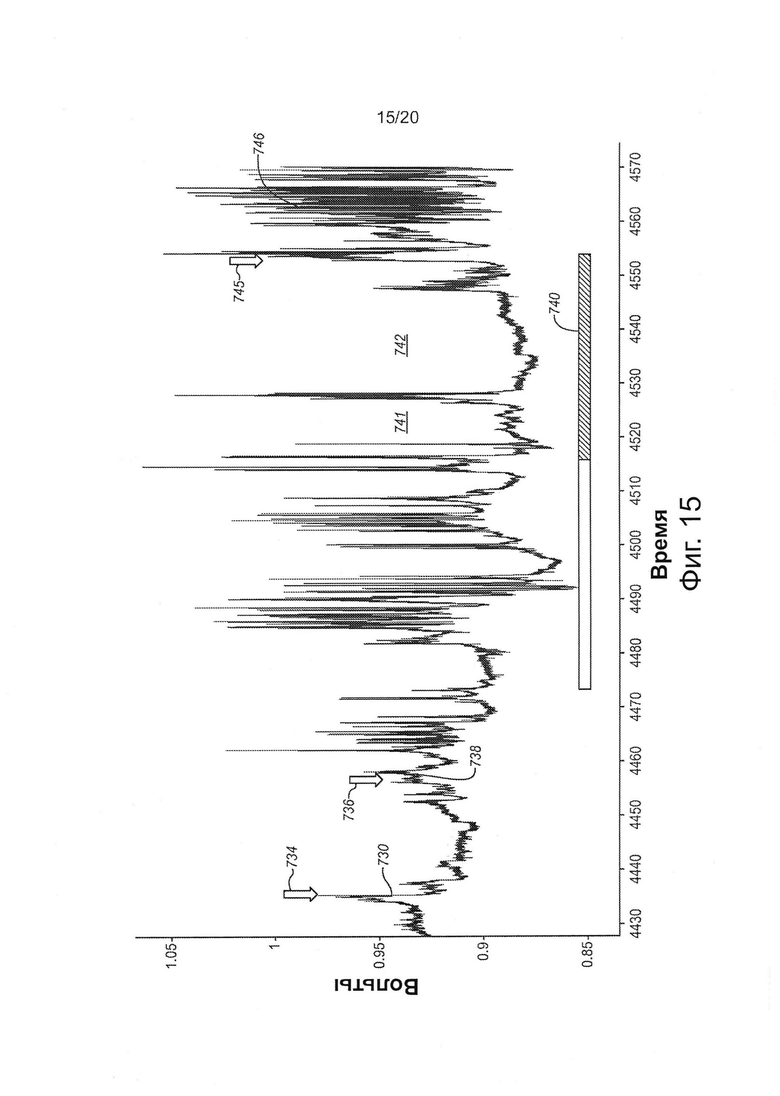
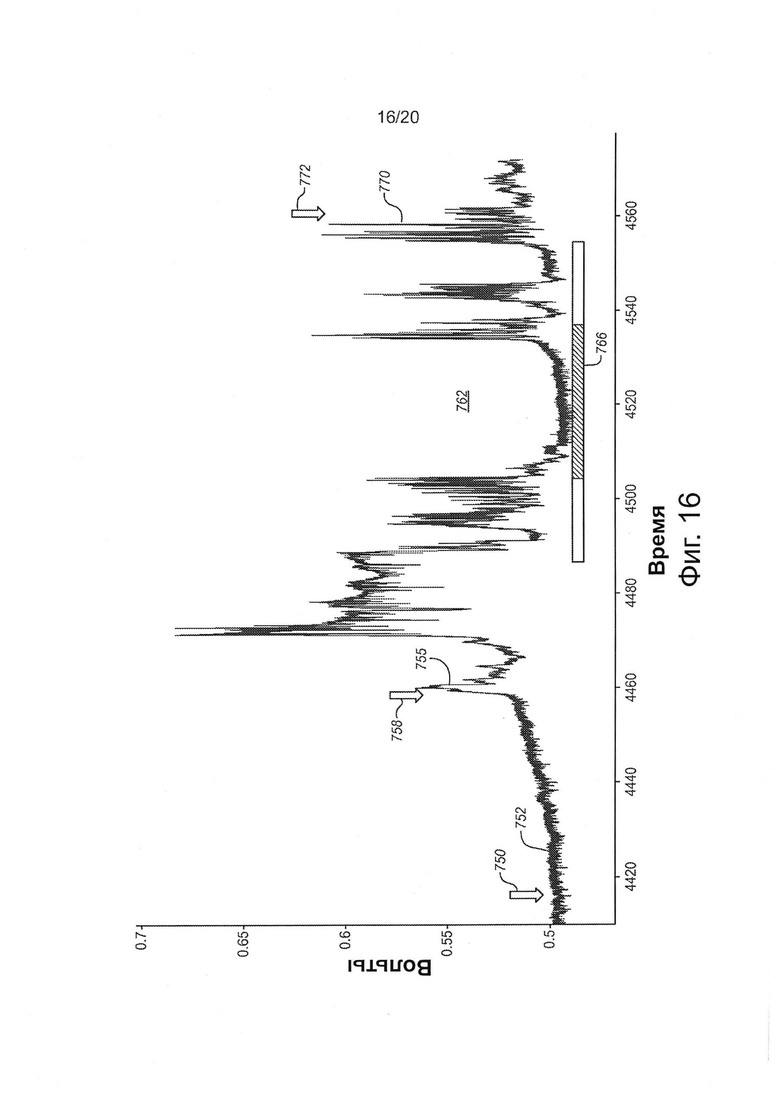


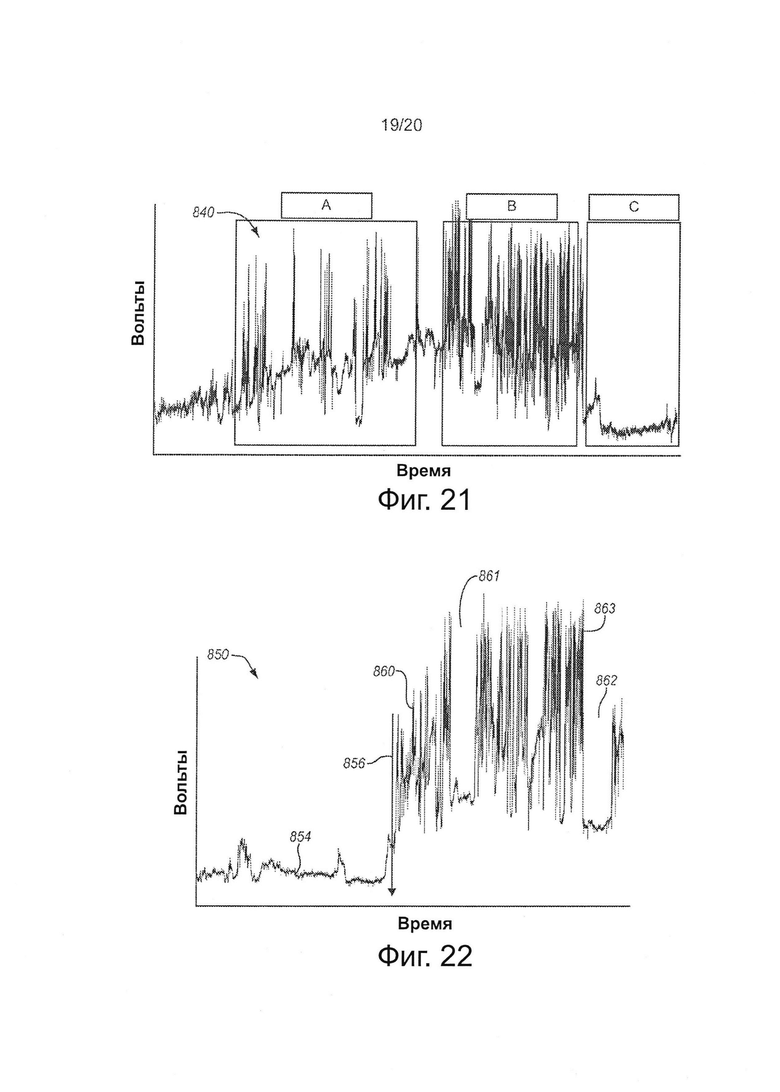

Изобретение относится к области гравиразведки и может быть использовано для разведки углеводородов. Сущность: система с датчиком гравитации включает контакт, содержащий первый металл и второй металл, отличный от первого металла, причем указанный контакт формирует объемный резонатор; частицу, характеризуемую волной де Бройля, причем указанная частица содержится в упомянутом объемном резонаторе; фононную волну в объемном резонаторе, причем упомянутая волна де Бройля связана с указанной фононной волной; источник питания для подачи электропитания на упомянутый контакт; измерительный элемент, выполненный с возможностью измерения сопротивления, напряжения или тока, причем указанный измерительный элемент электрически соединен с упомянутым контактом, при этом измерительный элемент формирует измеренный сигнал; систему регистрации для записи указанного измеренного сигнала. Датчик используется в способе определения возможных месторождений углеводородов, который включает следующие этапы: создание датчика гравитации для измерения изменений пространственного направления гравитационного поля; полет датчика гравитации над месторождением углеводородов; измерение изменений пространственного направления гравитационного поля для формирования сигнала изменения гравитации, указывающего на геологические подповерхностные объекты, обычно связанные с месторождениями углеводородов; регистрация указанного сигнала. Технический результат: расширение функциональных возможностей. 4 н. и 37 з.п. ф-лы, 24 ил.
1. Система с датчиком гравитации, включающая
контакт, содержащий первый металл и второй металл, отличный от первого металла, причем указанный контакт формирует объемный резонатор;
частицу, характеризуемую волной де Бройля, причем указанная частица содержится в указанном объемном резонаторе;
фононную волну в объемном резонаторе, причем указанная волна де Бройля связана с указанной фононной волной;
источник питания для подачи электропитания на указанный контакт;
измерительный элемент, выполненный с возможностью измерения сопротивления, напряжения или тока, причем указанный измерительный элемент электрически соединен с указанным контактом, при этом измерительный элемент формирует измеренный сигнал; и
систему регистрации для записи указанного измеренного сигнала.
2. Система с датчиком гравитации по п.1, в которой указанная частица не содержится в структуре решетки.
3. Система с датчиком гравитации по п.1, дополнительно содержащая акселерометр.
4. Система с датчиком гравитации по п.1, в которой система регистрации содержит систему географического позиционирования (GPS).
5. Система с датчиком гравитации по п.1, дополнительно содержащая транспортное средство, способное перемещать указанную систему датчика.
6. Система с датчиком гравитации по п.1, в которой указанное транспортное средство является самолетом.
7. Система с датчиком гравитации по п.5, в которой указанная система регистрации содержит систему картирования для отображения местоположения указанного транспортного средства.
8. Система с датчиком гравитации по п.1, в которой указанный контакт включает в себя
электропроводящую втулку, имеющую продольный канал; и
электропроводящий штифт с диэлектрическим покрытием, причем штифт расположен в указанном продольном канале для формирования указанного электрического контакта.
9. Система с датчиком гравитации по п.8, в которой указанные втулка и штифт выполнены из металла, а указанный диэлектрик содержит оксид металла.
10. Система с датчиком гравитации по п.9, в которой указанный оксид металла содержит оксид серебра.
11. Система с датчиком гравитации по п.8, в которой указанная втулка содержит трехслойную структуру, включающую слой меди или золота, сформированный между первым и вторым слоями из сплава.
12. Система с датчиком гравитации по п.1, в которой указанный источник питания является источником напряжения, причем напряжение составляет от 3 до 9 В.
13. Способ обнаружения изменений ориентации или локальных изменений гравитационного поля, связанных с подземными месторождениями, включающий этапы, на которых
получают систему с датчиком гравитации по п.1,
воздействуют электрическим полем на указанную частицу в объемном резонаторе для создания электрического контакта;
подвергают указанный контакт указанным изменениям ориентации или локальным изменениям гравитационного поля посредством перемещения объемного резонатора и частицы;
измеряют сопротивление, напряжение или ток на указанном контакте для формирования измеренного сигнала, характеризующего указанные изменения ориентации или локальные изменения гравитационного поля, при этом измеренное сопротивление, напряжение или ток является изменяющейся во времени величиной, которая зависит от перемещения объемного резонатора и частицы;
регистрируют указанный измеренный сигнал; и
анализируют указанный сигнал для обнаружения изменений ориентации или локальных изменений гравитационного поля, связанных с подземным месторождением.
14. Способ по п.13, в котором дополнительно перемещают в гравитационном поле указанную захваченную частицу в объемном резонаторе.
15. Способ по п.14, в котором перемещение включает в себя перемещение захваченной частицы в объемном резонаторе в транспортном средстве.
16. Способ по п.15, в котором перемещение включает в себя перемещение захваченной частицы в объемном резонаторе в самолете.
17. Способ по п.13, в котором регистрация включает в себя регистрацию измеренного сигнала в виде зависимости от времени.
18. Способ по п.13, в котором регистрация включает в себя регистрацию измеренного сигнала в виде зависимости от географического местоположения указанной захваченной частицы в объемном резонаторе.
19. Способ по п.13, в котором анализ включает в себя анализ амплитуды сигнала, частоты сигнала или характеристики и рисунка сигнала.
20. Способ обнаружения подземного месторождения, включающий этапы, на которых
получают систему с датчиком гравитации по п.1, применяют объемный резонатор с указанной частицей, источник питания и измерительный элемент в качестве датчика гравитации для измерения изменения гравитационного поля;
перемещают датчик гравитации в атмосфере или на земле над подземным месторождением;
измеряют изменение гравитационного поля вследствие перемещения датчика гравитации для получения изменяющейся во времени величины сигнала изменения гравитации, указывающего на подземное месторождение;
регистрируют указанный сигнал изменения гравитации; и
анализируют указанный сигнал изменения гравитации для обнаружения подземного месторождения.
21. Способ по п.20, в котором перемещение выполняют путем размещения датчика гравитации на транспортном средстве и перемещения транспортного средства.
22. Способ по п.21, в котором дополнительно отслеживают местоположение транспортного средства, и указанная регистрация включает в себя запись местоположения транспортного средства.
23. Способ по п.22, в котором указанный анализ включает в себя корреляцию зарегистрированного сигнала изменения гравитации с местоположением транспортного средства.
24. Способ по п.21, в котором указанное перемещение включает в себя размещение датчика на самолете и полет самолета над указанным месторождением.
25. Способ по п.24, в котором дополнительно отслеживают географическое местоположение самолета и регистрируют отслеживаемое местоположение.
26. Способ по п.25, в котором дополнительно отображают местоположение самолета в реальном времени.
27. Способ по п.26, в котором отображение включает в себя отображение планируемой линии полета и отклонения от линии полета.
28. Способ по п.27, в котором отображение включает в себя отображение на лобовом стекле самолета указанных планируемой линии полета и отклонений.
29. Способ по п.24, в котором дополнительно контролируют поворот самолета в горизонтальной плоскости для формирования сигнала поворота, при этом указанная регистрация включает в себя регистрацию сигнала поворота, а указанный анализ включает в себя использование сигнала поворота для повышения качества сигнала изменения гравитации.
30. Способ по п.24, в котором полет включает в себя полет самолета на высоте от 1,000 фут (300 м) до 20,000 фут (6000 м).
31. Способ по п.20, в котором дополнительно динамически интегрируют сигнал изменения гравитации по времени.
32. Способ по п.20, в котором дополнительно регистрируют накопление энергии в указанном сигнале с течением времени.
33. Способ по п.20, в котором выполняют отсчеты указанного сигнала с частотой 1000 отсчетов в секунду или более.
34. Способ по п.20, в котором подземное месторождение представляет собой месторождение углеводородов и/или запертый под слоем земли флюид.
35. Способ обнаружения подземного месторождения, включающий этапы, на которых
получают систему с датчиком гравитации по п.1, применяют объемный резонатор с указанной частицей, источник питания и измерительный элемент в качестве датчика подземного месторождения, способного обнаруживать указанное подземное месторождение;
перемещают датчик в атмосфере или на земле над подземным месторождением;
зондируют подземное месторождение вследствие перемещения датчика для получения изменяющейся во времени величины сигнала подземного месторождения, указывающего на присутствие подземного месторождения;
регистрируют сигнал подземного месторождения; и
анализируют сигнал подземного месторождения для обнаружения указанного подземного месторождения.
36. Способ по п.35, в котором перемещение выполняют путем размещения датчика на транспортном средстве и перемещения транспортного средства.
37. Способ по п.35, в котором перемещение включает в себя размещение указанного датчика на самолете и полет самолета над месторождением.
38. Способ по п.35, в котором дополнительно отслеживают географическое местоположения самолета и регистрируют отслеживаемое местоположение.
39. Способ по п.37, в котором дополнительно контролируют поворот самолета в горизонтальной плоскости для формирования сигнала поворота, при этом указанная регистрация включает в себя регистрацию сигнала поворота, а указанный анализ включает в себя использование сигнала поворота для повышения качества сигнала изменения гравитации.
40. Способ по п.37, в котором полет включает в себя полет самолета на высоте от 1,000 фут (300 м) до 20,000 фут (6000 м).
41. Способ по п.35, в котором подземное месторождения представляет собой месторождение углеводородов и/или запертый под слоем земли флюид.
| US 4920313 A, 24.04.1990 | |||
| US 2004000910 A1, 01.01.2004 | |||
| US 2002092350 A1, 18.07.2002 | |||
| US 2008020935 A1, 24.01.2008. |

