Уровень техники
Главным образом (но не исключительно), в области разведки природных ресурсов имеется необходимость измерять абсолютную величину и изменение гравитации в некоторой заданной точке и градиент по некоторой области, тем самым обнаруживая присутствие подземных аномалий, которые вызывают изменение величины измеряемой гравитации. Для обеспечения мобильного, точного, эффективного и дешевого способа для выполнения измерений измеряющее гравитацию оборудование могут размещать на различных транспортных средствах, таких как (в качестве примера, но не ограничения) самолет или вертолет, с компенсацией, обеспечиваемой регистрирующим перемещение оборудованием, для уменьшения или устранения влияния вибрации, перемещения транспортного средства и изгиба его конструкции на данные о гравитации и данные градиентометрии гравитации.
Для содействия описанию уровня техники изобретения далее приведено описание используемых определений и расчетов.
Одна стандартная гравитация определена как ускорение свободного падения тела на среднем уровне моря на широте 45,5° и составляет 9,80665 м/с2. В системе СИ один Гал - это единица ускорения, равная 1 см/с2. Таким образом, 1 мГал (1/1000 Гал, записывается мГал) составляет 1/1000 от 1 см/с2. Таким образом, 1 мГал составляет 1,0197 мкд, а одна стандартная гравитация составляет 980,665 Гал.
Вертикальный градиент гравитации (изменение с высотой) выше поверхности Земли равен приблизительно 3,1 мкГал на метр высоты, что дает в результате максимальную разность приблизительно в 2 Гал от вершины горы Эверест до уровня моря. Изменения в широте и высоте вызывают в результате варьирование величины гравитации от (обычно) 976 до 983 Гал.
Для измерения гравитации g⌀ там, где местность находится на среднем уровне моря и на широте ⌀, используют следующую формулу:
g⌀=9,780327(1+0,0053024sin22⌀-0,0000058sin22⌀)м·c-2.
Однако датчик гравитации должен лететь (обычно) в 100 метрах над средним уровнем моря (НСУМ). Первая коррекция этой формулы представляет собой, таким образом, поправку на приведение в свободном воздухе (ППСВ), которая учитывает высоты над уровнем моря. Гравитация уменьшается с высотой по закону, который вблизи поверхности Земли таков, что линейная экстраполяция дала бы нулевую гравитацию на высоте, равной половине радиуса Земли, т.е. уменьшение составляет 9,80665 м·с-2 на 3086 км. Таким образом,
g⌀=9,780327(1+0,0053024sin2⌀-0,0000058sin22⌀)-h∗3,086∗10-6 м·с-2.
где h - высота в метрах над средним уровнем моря.
Необходимо отметить, что для плоской местности, находящейся выше уровня моря, добавляется вторая поправка для гравитации ввиду дополнительной массы этой местности. Для этой цели дополнительную массу могут приблизительно приравнять бесконечной горизонтальной плите, и мы получим 2πG умножить на массу и разделить на площадь (при этом 2πG равно 4,2×10-10 м3·с-2·кг-1 (0,042 мкГал·кг-1·м2)) (поправка Буге).
Для средней плотности горных пород (например) 2,67 г·см-3 это дает 1,1×10-6 с"2 (0,11 мГал·м-1). В сочетании с поправкой на приведение в свободном воздухе это означает уменьшение гравитации у поверхности примерно 2 мкм·с-2 (0,20 мГал) на каждый метр высоты местности. (Необходимо отметить, что эти два эффекта взаимно уничтожаются при плотности поверхностных горных пород, в 4/3 раза превышающей среднюю плотность всей Земли)
Для гравитации ниже поверхности мы должны применять поправку на приведение в свободном воздухе, а также удвоенную поправку Буге. При модели бесконечной плиты это обусловлено тем, что при перемещении точки наблюдения ниже плиты гравитация, обусловленная этой плитой, изменяется в противоположном направлении.
g⌀=9,8061999-0,0259296cos(2⌀)+0,0000567cos2(2⌀)м·с-2
Рассмотрим геологический пример. Гравитационная аномалия сплошного месторождения со скачком плотности 300 кг·м-3 и размером 200 метров, находящегося на глубине 100 м, составляет приблизительно 2∗10-6 мс-2, или 0,00002% нормального гравитационного поля Земли (0,2 мкд).
Необходимо отметить, что градиентометрические данные обычно представляют в этвешах, причем 1 этвеш составляет 0,1 мГал/км. Таким образом, этвеш - это единица градиента гравитации, и 1 этвеш соответствует 10-9 с-2.
В уровне техники имеются многочисленные примеры механизмов, используемых для измерения гравитации (гравиметров) (например, LaCoste & Romberg-Scintrex, Inc., AIR-SEA II Dynamic Gravity Meter). В простейшей (и, возможно, старейшей) форме они могут представлять собой массу, прикрепленную к балке или пружине, при этом естественная (линейная) деформация балки или пружины пропорциональна величине гравитационного поля, приложенного к балке или пружине и соответствующей массе. Некоторая степень амортизации прикладывается к балке или пружине, снижая чувствительность, но уменьшая время стабилизации.
В более близкое к современности время MEMS-акселерометр (MEMS - Micro-Electro-Mechanical Systems - микроэлектромеханические системы) и соответствующий электронный интерфейс обеспечивают средства измерения малых ускорений указанного выше порядка.
Когда гравиметр используют для измерений с борта воздушного судна, многоосевые перемещения и изгиб конструкции самолета будут изменять естественные ускорения, обусловленные каким-либо изменением в гравитации, регистрируемой, когда самолет перемещается над местностью, и эти изменения необходимо компенсировать при обработке данных о гравитации. Например, вертикальное «колебание», вызванное воздушной турбулентностью, будет производить ускорения, во много раз большие, чем те, что возникают в результате изменений в величине гравитации. Воздушная турбулентность и возникающее в результате нее перемещение корпуса воздушного судна будут также вызывать изгибы конструкции самолета (главным образом крыльев по отношению к фюзеляжу), вводя вертикальные ускорения, которые будут изменять величины гравитации, считываемые датчиками гравитации. При любом пилоте самолет будет прецессировать циклическим образом вдоль пути его полета на частоте, определяемой летными характеристиками корпуса воздушного судна и запаздыванием управляющего воздействия человека. Изменения в пространственном положении самолета будут изменять воспринимаемое направление «вниз» через пол самолета, и, следовательно, гравиметрический датчик должен использовать некоторую форму стабилизации пространственного положения для поддержания истинной вертикальной оси отсчета.
На практике самолет используют для исследования определенной области и обычно в фиксированной схеме линий полета, имеющих известные позицию и ориентацию. В конце каждой линии самолет выполняет маневр разворота для его позиционирования для следующей линии. Желательно входить на каждую линию со стабильным с точки зрения позиции датчиком, и поэтому (в зависимости от используемой амортизации датчика) самолет должен удлинять траекторию подлета к началу линии. Это может приводить (при относительно малой исследуемой области) к значительному увеличению длины линии, увеличению издержек и уменьшению исследовательской способности для заданного запаса топлива, и, следовательно, является желательным свести к минимуму эффекты, которые имеют место в течение времени стабилизации, следующего за маневром воздушного судна.
Для измерения градиента гравитации (в качестве градиентометра) используемые датчики имеют такую же природу, что и те, что используются для измерения лишь гравитации, но обычно они более чувствительны и зачастую используются в парах с монтажом на определенном расстоянии друг от друга, чем обеспечивается возможность измерения градиента гравитации.
В уровне техники имеются примеры градиентометров (Air-FTG от Bell Geospace Ltd, Falcon от Fugro AS), которые используют пары акселерометров, смонтированных на (малом) фиксированном расстоянии друг от друга (и в корпусе, контролирующем температуру и пространственное положение) на медленно вращающемся диске, что помогает в процессе устранения шума и нейтрализации любых разностей в чувствительности акселерометров. Обе системы используют совмещенные диски с совокупностью из 12 акселерометров (4 на диск, смонтированных в 10 см друг от друга) в одной (большой и тяжелой) сборке, стабилизируемой по пространственному положению и температуре. Опубликованные результаты сравнения этих двух систем (ASEG-PESA Airborne Gravity Workshop 2004, Australian Government, ISBN: 1 920871 13 6) показывают, что обе системы способны сообщать о градиентах порядка 7 этвеш на отрезке 700 м (Air-FTG) и 8 этвеш на отрезке 400 м (Falcon) над испытательным участком с диапазоном градиентов до 70 этвеш.
Патент US 5357802 (Hoffmeyer) описывает градиентометр, использующий пары акселерометров, вращающихся на диске со скоростью приблизительно 15 об/мин, и говорит о том, что увеличение скорости вращения улучшает шумовую характеристику. Заявка на патент US 20040211255 (Leeuwen Н. и др., октябрь 2004) описывает подобную систему, использующую один более крупный диск (диаметром 0,6 метра) с акселерометрами количеством до 72, вращающийся со скоростью приблизительно 15 об/мин, что улучшает шумовую характеристику по сравнению с меньшим диском, и говорит о том, что могут быть получены чувствительности порядка 10 этвеш. Были предложены низкотемпературные градиентометры гравитации, использующие атомные резонансные технологии, тоже монтируемые на платформы, стабилизирующие пространственное положение (ArKex Ltd., EGG System).
Общим признаком большинства существующих и предлагаемых систем для измерения гравитации и градиента гравитации являются большие размер и масса оборудования - большинство являются относительно крупными по сравнению с размером типового (малого) самолета для геофизических исследований, нередко используемого для их размещения. Обычная площадь нижней поверхности такого оборудования составляет 2 квадратных метра, а суммарная масса датчика, систем менеджмента температуры и пространственного положения и обрабатывающей электроники приближается к 200 кг, а нередко и превышает 200 кг. По отношению к масштабам геологических объектов, которые подвергаются измерениям, все они представляют собой одноточечные измерительные системы.
Раскрытие изобретения
Согласно первому аспекту изобретения предлагается градиентометр, включающий первый акселерометр для генерации первого сигнала ускорения, второй акселерометр, отстоящий от первого акселерометра и предназначенный для генерации второго сигнала ускорения, первое устройство мониторинга, имеющее известное пространственное соотношение с первым акселерометром и предназначенное для обнаружения перемещения второго акселерометра и генерации первого сигнала коррекции, который является представлением обнаруженного перемещения, контроллер для модифицирования второго сигнала ускорения на основании первого сигнала коррекции с целью предоставления модифицированного второго сигнала ускорения так, чтобы градиент гравитации мог быть определен с использованием первого сигнала ускорения или модифицированной версии первого сигнала ускорения и модифицированного второго сигнала ускорения.
Первое устройство мониторинга может иметь по существу фиксированное пространственное соотношение с первым акселерометром.
Градиентометр может включать третий акселерометр, отстоящий от первого и второго акселерометров и предназначенный для генерации третьего сигнала ускорения, второе устройство мониторинга, имеющее известное пространственное соотношение с первым или вторым акселерометром и предназначенное для обнаружения перемещения третьего акселерометра и генерации второго сигнала коррекции, который является представлением обнаруженного перемещения, при этом контроллер предназначен для модифицирования третьего сигнала ускорения на основании второго сигнала коррекции с целью предоставления модифицированного третьего сигнала ускорения так, чтобы градиент гравитации и его направление могли быть определены с использованием первого сигнала ускорения, модифицированного второго сигнала ускорения и модифицированного третьего сигнала ускорения.
Второе устройство мониторинга может иметь по существу фиксированное пространственное соотношение с первым или вторым акселерометром.
Первый, второй и третий акселерометры могут быть расположены так, что образуют в целом равносторонний треугольник.
Первое и/или второе устройство мониторинга может включать лазерный модуль для направления лазерного пучка на соответствующий датчик положения, причем один из лазерного модуля и датчика положения имеет известное пространственное соотношение с одним из первого или второго акселерометров, а другой из лазерного модуля и датчика положения имеет известное пространственное соотношение с акселерометром, перемещение которого детектируется.
Градиентометр может включать четвертый акселерометр, отстоящий от первого, второго и третьего акселерометров, имеющий известное пространственное соотношение с первым акселерометром и предназначенный для генерации четвертого сигнала ускорения.
Четвертый акселерометр может иметь по существу фиксированное пространственное соотношение с первым акселерометром.
Один или более из акселерометров может представлять собой полупроводниковый акселерометр.
Градиентометр может включать обеспечиваемую с помощью GPS инерциальную измерительную систему отсчета, совмещенную с акселерометром.
Один или более из акселерометров может быть смонтирован на платформе, стабилизирующей пространственное положение.
Сигнал от обеспечиваемой с помощью GPS инерциальной измерительной системы отсчета может предоставляться каждой платформе, стабилизирующей пространственное положение.
Один или более из акселерометров может быть смонтирован в корпусе, стабилизирующем температуру.
Согласно второму аспекту настоящего изобретения предлагается транспортное средство, включающее градиентометр согласно первому аспекту.
Четвертый акселерометр может быть смонтирован приблизительно в центре тяжести транспортного средства.
Согласно третьему аспекту настоящего изобретения предлагается аэроплан, включающий градиентометр согласно первому аспекту. Второй акселерометр может быть смонтирован на первом крыле, а третий акселерометр может быть смонтирован на втором крыле, при этом каждый акселерометр смонтирован либо внутри каркаса соответствующего крыла, либо в аэродинамической гондоле.
Согласно четвертому аспекту настоящего изобретения предлагается способ измерения градиента гравитации, включающий этапы обеспечения первого сигнала ускорения, представляющего ускорение, испытываемое датчиком, находящимся в первом месте, обеспечения второго сигнала ускорения, представляющего ускорение, испытываемое вторым датчиком, находящимся во втором месте, отстоящем от первого места, обнаружения перемещения второго датчика для определения первого сигнала коррекции, который является представлением обнаруженного перемещения, модифицирования второго сигнала ускорения на основании первого сигнала коррекции для предоставления модифицированного второго сигнала ускорения, и определения градиента гравитации с использованием первого сигнала ускорения или модифицированной версии первого сигнала ускорения и модифицированного второго сигнала ускорения.
Способ может включать этапы предоставления третьего сигнала ускорения, представляющего ускорение, испытываемое третьим датчиком, находящимся в третьем месте, отстоящем от первого и второго мест, обнаружения перемещения третьего датчика для определения второго сигнала коррекции, который является представлением обнаруженного перемещения, модифицирования третьего сигнала ускорения на основании второго сигнала коррекции для предоставления модифицированного третьего сигнала ускорения и определения градиента гравитации и его направления с использованием первого сигнала ускорения и модифицированных второго и третьего сигналов ускорения.
Согласно пятому аспекту настоящего изобретения предлагается гравиметр для градиентометра согласно первому аспекту, включающий акселерометр, предназначенный для генерации сигнала ускорения, устройство мониторинга, имеющее известное пространственное соотношение с плоскостью отсчета и предназначенное для обнаружения перемещения акселерометра и генерации сигнала коррекции, представляющего обнаруженное перемещение, контроллер для модифицирования сигнала ускорения на основании сигнала коррекции с целью предоставления модифицированного сигнала ускорения.
Краткое описание чертежей
Изобретение может быть осуществлено на практике различными способами, и в качестве примера далее будет описан один вариант осуществления и его вариации со ссылкой на прилагаемые чертежи, на которых
фигура 1 - схематичный вид сверху самолета, использующего оборудование согласно изобретению,
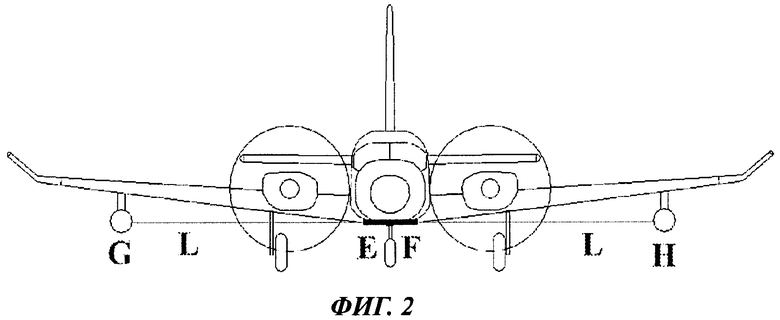
фигура 2 - схематичный вид спереди самолета, использующего оборудование согласно изобретению,
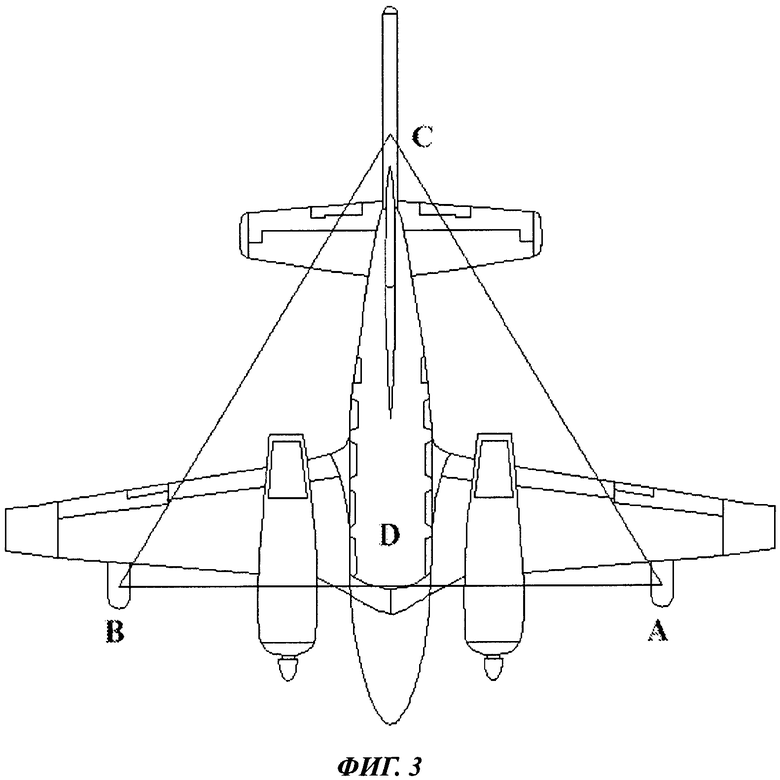
фигура 3 - схематичный вид сверху самолета, использующего оборудование согласно изобретению, иллюстрирующий треугольник из датчиков, сформированный элементами оборудования.
Осуществление изобретения
Для обеспечения мобильного, точного, эффективного и дешевого способа для выполнения измерений измеряющее гравитацию оборудование (ABCD) могут размещать на различных транспортных средствах, таких как (в качестве примера, но не ограничения) самолет или вертолет, с компенсацией, обеспечиваемой регистрирующим перемещение оборудованием (EFGH), для уменьшения или устранения влияния вибрации, перемещения транспортного средства и изгиба его конструкции на данные о гравитации и данные градиентометрии гравитации.
Для того чтобы надлежащим образом измерять градиент гравитации, имеется два требования: определять градиент в свободном пространстве с заданной ориентацией по компасу и измерять величину гравитации в экстремумах этого градиента. Существующие способы фокусировались на создании стабилизированных датчиков с чрезвычайно высокой чувствительностью и низким шумом, эффективно работающих в одной точке, и их использовании на относительно малых расстояниях, определенных, главным образом, физическими ограничениями, вводимыми общим размером оборудования, необходимого для поддержания датчика(ов), частоты замеров и скорости перемещения над местностью.
Альтернативным подходом, который использован в изобретении, является значительное увеличение физической базы для измеряемого градиента и за счет этого (при таких же рабочих характеристиках датчика) обеспечение возможности измерения гораздо меньшего градиента. Увеличение базы также обеспечивает возможность использования датчика с более низкими рабочими характеристиками, но сохранения такого же (или обеспечения более хорошего) общего результата по сравнению с системой с более короткой базой.
Рассмотрим два градиента, первый из которых получен при длине базы 10 см, а второй - при длине базы 10 метров, при этом в обоих случаях используются датчики, имеющие полный размах уровня шума 0,1 мГал. Без сглаживания в первом случае минимальный градиент, который может быть точно измерен (если игнорировать знак), составляет 0,2 мГал/10 см, или 2 мГал/м. При использовании такого же датчика с 10-метровой базой минимальный градиент уменьшается до 0,2/10=0,02 мГал/м, т.е. является в 100 раз меньшим.
Для того чтобы полностью определить величину и направление градиента, по меньшей мере в трех фиксированных точках на плоскости должны быть выполнены измерения, причем эти точки формируют треугольник (фигура 1, ABC), при этом средняя величина и направление градиента могут быть вычислены из точечных величин. В предпочтительном варианте осуществления треугольник (ABC) может быть равносторонним.
Теоретически, возможно взять три (в современных технологиях) одноточечных гравиметра и прикрепить их к концевым частям крыльев и хвосту (например) самолета, тем самым сформировав треугольник из датчиков, и, следовательно, обеспечить возможность измерения градиента гравитации в любой данной точке в полете. На практике это не является возможным, поскольку масса в 200 кг в каждой из предложенных точек приведет к невозможности полета самолета. Однако является возможным использовать три миниатюрных, имеющих низкую шумовую характеристику полупроводниковых MEMS-акселерометра, каждый из которых смонтирован на платформе, быстро стабилизирующей пространственное положение, внутри корпуса, стабилизирующего температуру. Это решение опирается на точную компенсацию любого вертикального смещения датчика, вызванного «колыханием» крыла вследствие воздушной турбулентности.
Фигура 1 показывает предлагаемую конфигурацию градиентометра гравитации, смонтированного внутри самолета с неподвижным крылом. Необходимо отметить, что такая же геометрическая конфигурация может быть достигнута при использовании вертолета или иного воздушного или наземного транспортного средства и несущей конструкции для поддержания датчиков на одинаковых расстояниях друг от друга. В варианте осуществления самолета, о котором идет речь, датчики (А) и (В) смонтированы в аэродинамических гондолах, прикрепленных к крыльям самолета; хвостовой выступающий элемент (S) смонтирован на задней части самолета для удержания датчика(ов) для других геофизических технологий (например, аэромагнитных измерений), и внутри этого хвостового выступающего элемента смонтирован датчик (С). Четвертый датчик (D) смонтирован вблизи полетного центра тяжести самолета. Продольная жесткость трубы, сформированной корпусом самолета и выступающим хвостовым элементом, будет ограничивать относительное перемещение между датчиками (С) и (D) до приемлемого минимума, и поэтому датчики (С) и (D) будут оставаться в фиксированной позиции относительно осевой линии фюзеляжа. При этом датчики (А) и (В) будут (независимо) перемещаться вертикально (т.е. колыхаться) по радиальной траектории, центр которой близок к продольной осевой линии фюзеляжа, причем это перемещение обратно пропорционально жесткости крыла и, главным образом, обусловлено воздушной турбулентностью, вызванной, отчасти, образованием завихрений на концевых частях крыльев. Этот эффект может быть уменьшен путем добавления поднятых вверх концевых частей (Т) крыльев для предотвращения образования завихрений, но ускорения, производимые вследствие колыхания крыльев, по-прежнему будут во много раз больше, чем ускорения, производимые изменениями в нормальной величине гравитации.
Для того чтобы предлагаемая система градиентометра гравитации была практически осуществима, либо должен использоваться способ измерения колыхания крыла с высокой степенью точности, а получаемые данные должны использоваться для компенсации выходных данных датчиков (А) и (В), с тем чтобы устранять вызванные колыханием ошибки, либо должна использоваться платформа 3-осевой стабилизации у датчиков (А) и (В), с тем чтобы устранять нежелательное вертикальное ускорение, вызванное колыханием крыла. Последний вариант не рассматривается как практически осуществимый ввиду размера, массы и сложности такой платформы, и ввиду того, что компенсация по вертикальной оси должна быть очень быстрой и точной для полного устранения вертикальных колебаний корпуса датчика.
Фигура 2 показывает вид спереди самолета, на который установлены крыльевые гондолы для удержания датчиков (А) и (В) гравитации. Расстояние между гондолами будет зависеть от используемого самолета, но в показанном примере оно составляет приблизительно 10 метров. Имеется отчетливый зазор между сторонами фюзеляжа ниже крыльев и крыльевыми гондолами. Для обеспечения средств точного измерения колыхания крыла и в предпочтительном варианте осуществления два лазерных передающих модуля (Е) и (F) смонтированы на каждой стороне фюзеляжа с направлением лазерных пучков (L) на датчики (G) и (Н) положения пучка, смонтированные внутри крыльевых гондол.
Когда каждое крыло смещается вертикально относительно оси фюзеляжа, лазерная система измеряет смещение крыла (гондолы) с высокой степенью точности (до микрометров). Сигнал смещения используется для модифицирования выходных данных датчиков (А) и (В), благодаря чему значительно уменьшается или устраняется влияние колыхания крыла на выходные данные датчика. Скорость реакции лазерной системы будет значительно больше, чем скорость реакции 3-осевой платформы, приводимой в действие акселерометрами, расположенными вблизи датчиков (А) и (В), и измеряющей влияние колыхания крыла, и, следовательно, компенсация будет значительно более точной, к тому же 3-осевые акселерометры также будут реагировать на сигнал гравитации. Кроме того, лазерный датчик регистрирует перемещение, которое дает в результате ускорение. Использование его в качестве компенсации не вносит изменения в ускорение, возникающее в результате какого-либо изменения в гравитации. Кроме того, вертикальный градиент гравитации (3,1 мкГал/м) не будет оказывать существенного влияния на измерения при изменении абсолютной высоты датчика вследствие указанного перемещения, и, следовательно, способ будет в вычислительном отношении надежным, обеспечивающим полную компенсацию колыхания крыла.
В дополнение к датчику (D) гравитации имеется обеспечиваемая с помощью GPS инерциальная измерительная система (J) отсчета, совмещенная с датчиком (D), для предоставления истинного обращенного вниз сквозь пол самолета направления отсчета. Эти данные могут также подаваться на каждую из платформ, стабилизирующих пространственное положение для датчиков (A)-(D), для компенсации любой механической деформации, которая могла бы в противном случае изменить обращенное вниз направление отсчета на каждом датчике (например, для компенсации любого продольного скручивания основных крыльев, которое в противном случае вводило бы отклонения по тангажу в позиции каждого датчика).
После применения всех компенсаций перемещения данные от каждого датчика могут быть скорректированы для высоты датчика над средним уровнем моря и, если необходимо, может быть применена поправка Буге. Данные о градиенте гравитации, полученные от датчиков (А, В, С), могут затем быть наложены на данные о гравитации от датчика (D) с получением абсолютной гравитационной картины исследуемой местности.
Как должно быть понятно из вышеприведенного описания, хотя в описанном примере градиентометр включает датчики (A-D), в других вариантах осуществления градиентометр может включать два или более датчика, по меньшей мере один из которых подвергается мониторингу с помощью устройства мониторинга, предназначенного для детекции перемещения датчика и предоставления сигнала коррекции контроллеру для модифицирования сигнала датчика, подвергаемого мониторингу, в соответствии с детектированным перемещением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИИ | 1995 |
|
RU2144686C1 |
| ИЗМЕРИТЕЛЬНЫЙ БЛОК ДЛЯ ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 2017 |
|
RU2668954C1 |
| Способ подготовки высокодетальных гравиметрических карт | 2021 |
|
RU2777713C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| ГРАДИОМЕТР СИЛЫ ТЯЖЕСТИ | 1998 |
|
RU2199137C2 |
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2009 |
|
RU2517954C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
| ОРБИТАЛЬНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2024 |
|
RU2839265C1 |
Группа изобретений относится к способам и устройствам для измерения градиента гравитации, которые могут быть использованы при разведке природных ресурсов. Сущность: градиентометр содержит: первый акселерометр для генерации первого сигнала ускорения; второй акселерометр, отстоящий от первого акселерометра и предназначенный для генерации второго сигнала ускорения; первое устройство мониторинга, имеющее известное пространственное соотношение с первым акселерометром и предназначенное для обнаружения перемещения второго акселерометра относительно первого акселерометра и генерации первого сигнала коррекции, который является представлением обнаруженного перемещения; контроллер, выполненный с возможностью модифицирования второго сигнала ускорения на основании первого сигнала коррекции так, чтобы градиент гравитации мог быть определен с использованием первого сигнала ускорения и второго сигнала ускорения. Оборудование может быть размещено на транспортном средстве. Технический результат: обеспечение мобильности, точности и эффективности измерений градиента гравитации. 5 н. и 13 з.п. ф-лы, 3 ил.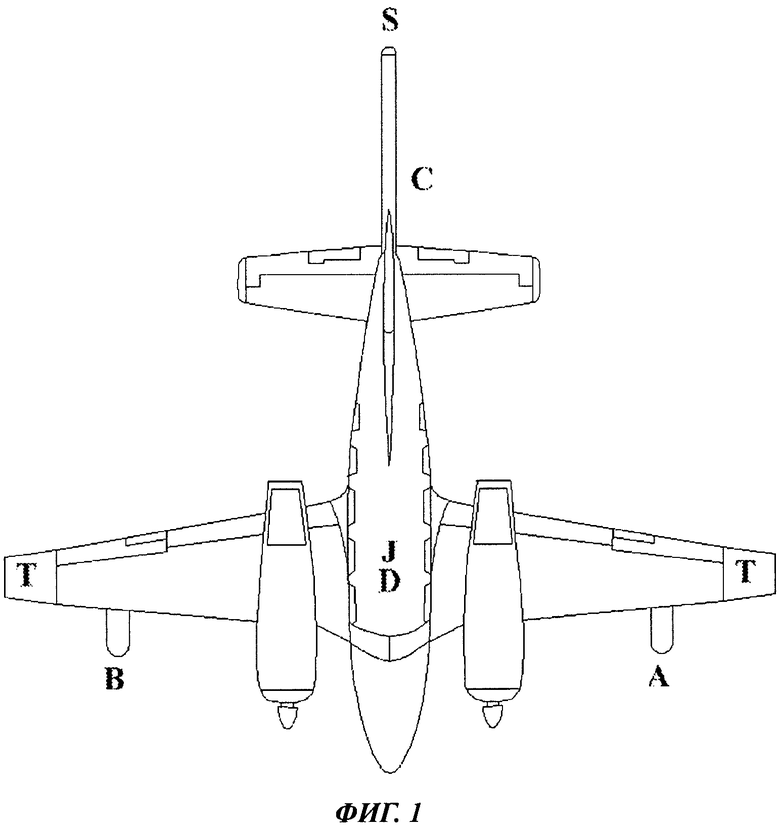
1. Градиентометр, содержащий:
первый акселерометр для генерации первого сигнала ускорения;
второй акселерометр, отстоящий от первого акселерометра и предназначенный для генерации второго сигнала ускорения;
первое устройство мониторинга, имеющее известное пространственное соотношение с первым акселерометром и предназначенное для обнаружения перемещения второго акселерометра относительно первого акселерометра и генерации первого сигнала коррекции, который является представлением обнаруженного перемещения;
контроллер, выполненный с возможностью модифицирования второго сигнала ускорения на основании первого сигнала коррекции так, чтобы градиент гравитации мог быть определен с использованием первого сигнала ускорения и второго сигнала ускорения.
2. Градиентометр по п.1, отличающийся тем, что первое устройство мониторинга имеет, по существу, фиксированное пространственное соотношение с первым акселерометром.
3. Градиентометр по п.1, отличающийся тем, что содержит третий акселерометр, отстоящий от первого и второго акселерометров и предназначенный для генерации третьего сигнала ускорения; второе устройство мониторинга, имеющее известное пространственное соотношение с первым или вторым акселерометром и предназначенное для обнаружения перемещения третьего акселерометра и генерации второго сигнала коррекции, который является представлением обнаруженного перемещения, при этом контроллер выполнен с возможностью модифицирования третьего сигнала ускорения на основании второго сигнала коррекции так, чтобы градиент гравитации и его направление могли быть определены с использованием первого, второго и третьего сигналов ускорения.
4. Градиентометр по п.3, отличающийся тем, что второе устройство мониторинга имеет, по существу, фиксированное пространственное соотношение с первым или вторым акселерометром.
5. Градиентометр по п.3, отличающийся тем, что первый, второй и третий акселерометры расположены с образованием, по существу, равностороннего треугольника.
6. Градиентометр по п.3, отличающийся тем, что первое и/или второе устройство мониторинга включает лазерный модуль для направления лазерного пучка на соответствующий датчик положения, причем один из лазерного модуля и датчика положения имеет известное пространственное соотношение с одним из первого или второго акселерометров, а другой из лазерного модуля и датчика положения имеет известное пространственное соотношение с акселерометром, перемещение которого обнаруживается.
7. Градиентометр по одному из пп.3-6, отличающийся тем, что содержит четвертый акселерометр, отстоящий от первого, второго и третьего акселерометров, имеющий известное пространственное соотношение с первым акселерометром и предназначенный для генерации четвертого сигнала ускорения.
8. Градиентометр по п.7, отличающийся тем, что четвертый акселерометр имеет, по существу, фиксированное пространственное соотношение с первым акселерометром.
9. Градиентометр по п.1, отличающийся тем, что один или более из акселерометров представляют собой полупроводниковый акселерометр.
10. Градиентометр по п.1, отличающийся тем, что содержит обеспечиваемую с помощью GPS инерциальную измерительную систему отсчета, совмещенную с акселерометром.
11. Градиентометр по п.10, отличающийся тем, что один или более из акселерометров смонтированы на платформе, стабилизирующей пространственное положение.
12. Градиентометр по п. 11, отличающийся тем, что сигнал от обеспечиваемой с помощью GPS инерциальной измерительной системы отсчета предоставляется каждой платформе, стабилизирующей пространственное положение.
13. Градиентометр по п.1, отличающийся тем, что один или более акселерометров смонтированы в корпусе, стабилизирующем температуру.
14. Транспортное средство, включающее градиентометр, охарактеризованный в п.7 или 8, причем четвертый акселерометр смонтирован приблизительно в центре тяжести транспортного средства.
15. Аэроплан, содержащий градиентометр, охарактеризованный в одном из пп.3-8, причем второй акселерометр смонтирован на первом крыле, а третий акселерометр смонтирован на втором крыле, при этом каждый акселерометр смонтирован либо внутри каркаса соответствующего крыла, либо в аэродинамической гондоле.
16. Гравиметр для градиентометра, охарактеризованного в одном из пп.1-13, содержащий:
акселерометр для генерации сигнала ускорения;
устройство мониторинга, имеющее известное пространственное соотношение с плоскостью отсчета и предназначенное для обнаружения перемещения акселерометра относительно этой плоскости отсчета и генерации сигнала коррекции, который является представлением обнаруженного перемещения;
контроллер, выполненный с возможностью модифицирования сигнала ускорения на основании сигнала коррекции для предоставления модифицированного сигнала ускорения.
17. Способ измерения градиента гравитации, содержащий этапы:
обеспечения первого сигнала ускорения, представляющего ускорение, испытываемое первым датчиком, находящимся в первом месте,
обеспечения второго сигнала ускорения, представляющего ускорение, испытываемое вторым датчиком, находящимся во втором месте, отстоящем от первого места,
обнаружения перемещения второго датчика для определения первого сигнала коррекции, который является представлением обнаруженного перемещения второго датчика относительно первого датчика,
модифицирования второго сигнала ускорения на основании первого сигнала коррекции, и
определения градиента гравитации с использованием первого и второго сигналов ускорения.
18. Способ по п.17, отличающийся тем, что содержит этапы обеспечения третьего сигнала ускорения, представляющего ускорение, испытываемое третьим датчиком, находящимся в третьем месте, отстоящем от первого и второго мест; обнаружения перемещения третьего датчика для определения второго сигнала коррекции, который является представлением обнаруженного перемещения; модифицирования третьего сигнала ускорения на основании второго сигнала коррекции; и определения градиента гравитации и его направления с использованием первого, второго и третьего сигналов ускорения.
| СПОСОБ ГРАВИТАЦИОННОЙ ГРАДИОМЕТРИИ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2298211C2 |
| US 5341681 А, 30.08.1994 | |||
| WO 9505615 A1, 23.02.1995 | |||
| WO 9505614 A1, 23.02.1995. | |||

