Изобретение относится к области навигации, а более конкретно, к способу определения координат объекта на поверхности Земли, под водой, под поверхностью Земли. Предлагаемый способ навигации и устройство для его осуществления основаны только на регистрации физических полей Земли и синхронизации по всемирному времени. Регистрация местоположения является полностью автономной.
Уровень техники, позволяющий использовать физические параметры Земли для навигации, включает устройства, основанные на регистрации векторов магнитного поля, гравитации, дополняемые различными неинерциальными системами. К ним относятся механические гироскопы, оптические, основанные на эффекте Саньяка, твердотельные волновые гироскопы, в работе которых используется эффект Брайана, поворотно-чувствительные устройства, использующие колеблющиеся массы, датчики угловой скорости, основанные на Кориолисовых силах с использованием акустических волн.
Известен навигационный комплекс, использующий естественные и искусственные поля Земли (RU 2558647 от 15.04.2014 Опубликован 10.08.2015 Бюл. №22), содержащий инерциальную систему, систему навигации по искусственным и физическим полям Земли, в том числе спутниковую навигационную систему. Недостаток комплекса в том, что его работу обеспечивают внешние навигационные системы. Это затрудняет его работу в автономном режиме.
Наиболее близкой по совокупности существенных признаков к изобретению является «Система навигации автономного необитаемого подводного аппарата» (RU 2460043 от 20.05.2011 Опубликовано 27.08.2012 Бюл. №24). включающая гирокомпас, использующая данные физических полей Земли ее центра в геоцентрической системе, притяжения Луны, единую систему времени, объединенных локальной вычислительной сетью. Недостаток данной системы навигации в ее не автономности в состав системы навигации входит обеспечивающее судно, оснащенное приемником спутниковой навигационной системы, осуществляющей корректировку расходящихся навигационных данных. В условиях ледовой обстановки подводному аппарату необходимо всплывать, что не всегда возможно.
Основным результатом изобретения является способ построения навигационной системы только по регистрации стабильных физических полей Земли - регистрируют вектор направления силы тяжести, по нему определяют направление на центр Земли, в качестве гироскопического датчика привязки к географическому направлению север - юг используют ось суточного вращения Земли, направление на которую, относительно объекта навигации, регистрируют с помощью пассивной пеленгации датчиком вектора силы Кориолиса, параметры которого зависят от направления этой силы и ориентации датчика, угловым сканированием датчика определяют ортогональное направление на ось вращения Земли и на ось вращения системы Земля-Луна вокруг общего центра масс, при этом, по углу между ортогональным направлением на ось Земли и направлением вектора силы гравитации, определяют широту места, и, по углу между ортогональным направлением на ось вращения системы Земля-Луна вокруг общего центра масс и направлением на ось вращения Земли определяют фазу Луны для данного места и вычисляют долготу места по текущему всемирному времени в момент регистрации.
Преимущество данного способа состоит в том, что навигационным параметром является не «эмуляция» направления оси вращения Земли на примере гирокомпаса маятникового типа, а осуществляется физическая регистрация этого направления датчиком вектора силы Кориолиса. Периодическая спутниковая коррекция, необходимая для устранения накапливающейся ошибки гирокомпаса, в этом случае не требуется. Следует подчеркнуть, что сила Кориолиса действует во всех точках Земли, в том числе и на полюсах, что позволяет осуществлять навигацию в этих широтах.
Для осуществления главного изобретения группы - способа навигации используется устройство - датчик вектора силы Кориолиса. Известен «Чувствительный элемент гироскопа» (RU 2457436 от 20.04.2011 Опубликовано: 27.07.2012 Бюл. №21), содержащий твердотельный звукопровод, по которому от излучателя распространяется акустическая поперечная объемная волна. При наличии вращения появляется помимо поперечной составляющей продольная составляющая волны, обусловленная действием силы Кориолиса. Эта составляющая регистрируется приемным преобразователем продольных волн. Возникающий при этом сигнал пропорционален угловой скорости вращения датчика. Недостаток известного устройства в том, что конструкция датчика предназначена для регистрации больших скоростей вращения и его чувствительность недостаточна для регистрации параметров вращения Земли.
Наиболее близким по совокупности существенных признаков к изобретению, предназначенному для осуществления предложенного способа навигации, является «Одночастотный генератор для анализа жидких сред» (Патент RU 2343474 от 18.01.2006, Опубликовано: 10.01.2009 Бюл. №1), содержащий резонатор открытого типа, заполненный жидкостью, и содержащий узкополосные электроакустический и акустоэлектрический преобразователи в виде высокодобротных кварцевых резонаторов.
Электроакустический и акустоэлектрический преобразователи включены в цепь обратной связи усилителя, являющеюся составной частью генератора когерентных колебаний, создающего режим многолучевой интерференции акустической бегущей волны в кольце усилитель-резонатор усилитель. Генератор работает в одномодовом режиме и обладает высокой чувствительностью к изменению частоты при вариациях физических параметров среды, заполняющей резонатор. Недостаток устройства в том, что конструкция не может быть использована в качестве резонатора закрытого типа с фиксацией температуры и давления в составе многомодового когерентного генератора для анализа физических параметров газовой среды.
Датчик вектора силы Кориолиса выполнен в виде замкнутого объема, заполненного газом, стабилизированным по давлению и температуре. В исходном состоянии газ в объеме изотропен с учетом градиента давления из-за вектора силы тяжести столба газа по вертикали. Изотропность нарушается во вращающейся системе тепловое движение части частиц имеет радиальную составляющую, направленную на ось вращения и, вследствие вращения Земли, сила Кориолиса отклоняет их движение в ортогональном направлении к радиальной составляющей. Появляется выделенное направление в динамике движения частиц, наличие которого можно зарегистрировать, создав режим резонансных колебаний в объеме резонатора бегущих акустических волн с высокой степенью когерентности. Возникает второе направление - вектор волнового фронта акустических волн. Изменение угла между этими двумя направлениями влияет на смещение по частоте спектра частот резонатора. Формируется диаграмма направленности для углового сканирования датчиком. Направлению на центр вращения соответствует экстремум в смещении частот спектра мод резонатора. Многомодовый режим возбуждения когерентного сигнала генератора позволяет создать широкополосный спектр с большим произведением ширины спектра на время интегрирования при выполнении преобразования Фурье. Большая база сигнала позволяет создать эффективные алгоритмы обработки потока данных.
Технический результат главного изобретения достигается тем, что в способе навигации по вектору сил Кориолиса Земли, включающем регистрацию физических полей, в частности, вектора гравитационного поля, направленного на центр Земли, включающем также использование данных о динамике взаимного расположения оси суточного вращения Земли и оси вращения системы Земля-Луна вокруг общего центра масс с привязкой к всемирному времени, согласно изобретению, в качестве гироскопического датчика привязки к географическому направлению север-юг используют ось суточного вращения Земли, направление на которую, относительно объекта навигации, регистрируют с помощью пассивной пеленгации датчиком вектора силы Кориолиса. параметры которого зависят от направления этой силы и ориентации датчика, угловым сканированием датчика определяют ортогональное направление на ось вращения Земли и на ось вращения системы Земля-Луна вокруг общего центра масс, при этом, по углу между ортогональным направлением на ось Земли и направлением вектора силы гравитации, определяют широту места, и, по углу между ортогональным направлением на ось вращения системы Земля Луна вокруг общего центра масс и направлением на ось вращения Земли определяют фазу Луны для данного места и вычисляют долготу места по текущему всемирному времени в момент регистрации, что эквивалентно привязке к объектам «небесной сферы».
Устройство, датчик вектора сил Кориолиса, предназначенное для осуществления главного изобретения - способа навигации по вектору сил Кориолиса Земли, содержащее когерентный генератор с запаздывающей обратной связью, создаваемую резонатором, включающим электроакустический и акустоэлектрический преобразователи, задержку в котором выполняет среда с малой скоростью распространения акустической волны, содержащее также вычислительное устройство, формирующее выходные данные, согласно изобретению, содержит акустический резонатор закрытого типа, заполненный газом при фиксированных температуре и давлении, подключенный электроакустическим и акустоэлектрическим преобразователями в электрическую цепь обратной связи усилителя, являющегося составной частью многомодового генератора когерентных колебаний, создающего режим многолучевой интерференции бегущей волны в кольце усилитель - резонатор - усилитель, частоты спектра мод которого подвержены изменениям из-за возбуждения силой Кориолиса составляющей поперечных колебаний частиц в газовой среде по отношению к направлению на ось вращения, направлению, составляющему угол с варьируемым направлением продольных колебаний бегущей волны в резонаторе, что приводит к созданию диаграммы направленности резонатора для пассивной пеленгации направления по вариациям частот спектра.
Сущность изобретения поясняется рисунками, представленными на фиг. 1, фиг. 2 и фиг. 3.
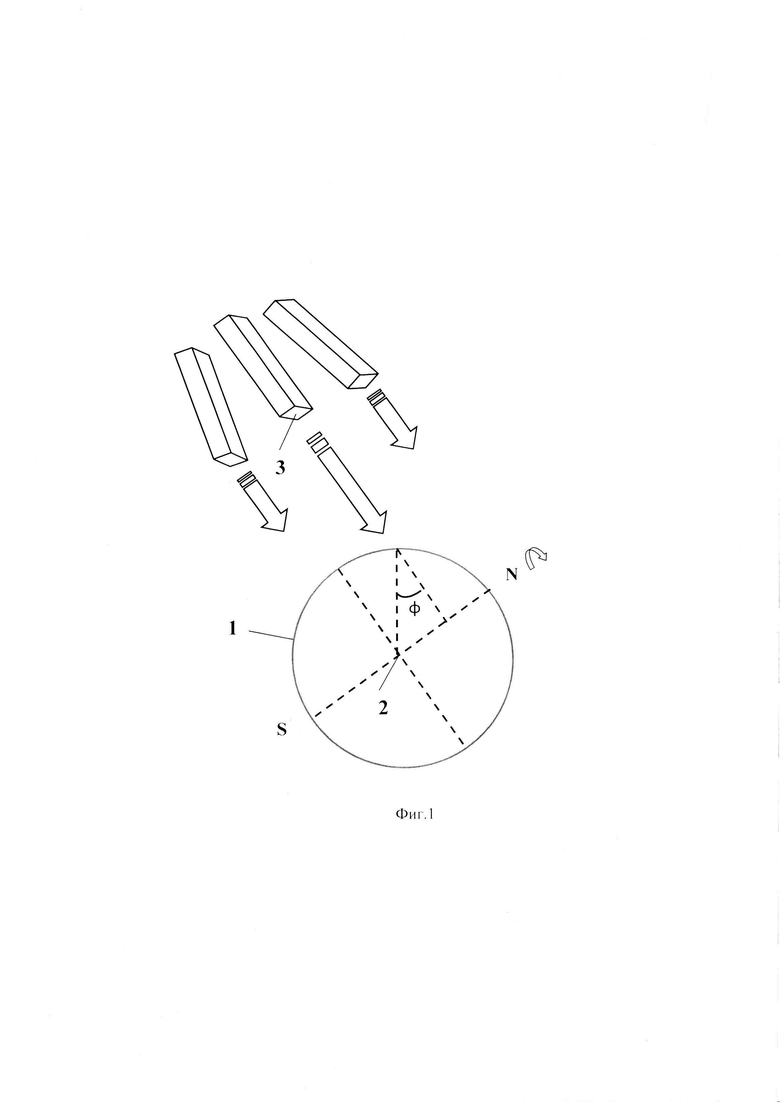
На фиг. 1 представлен рисунок, иллюстрирующий результат пространственного сканирования Земли (1) для определения ортогонального направления на ось вращения N-S, проходящую через ее центр (2) датчиком вектора сил Кориолиса (3). Направлению экстремума показаний датчика, в соответствии с его диаграммой направленности, соответствует ортогональ к оси N-S. Регистрируемый угол φ между этим направлением и вектором силы тяжести Земли, соответствует широте места положения датчика.
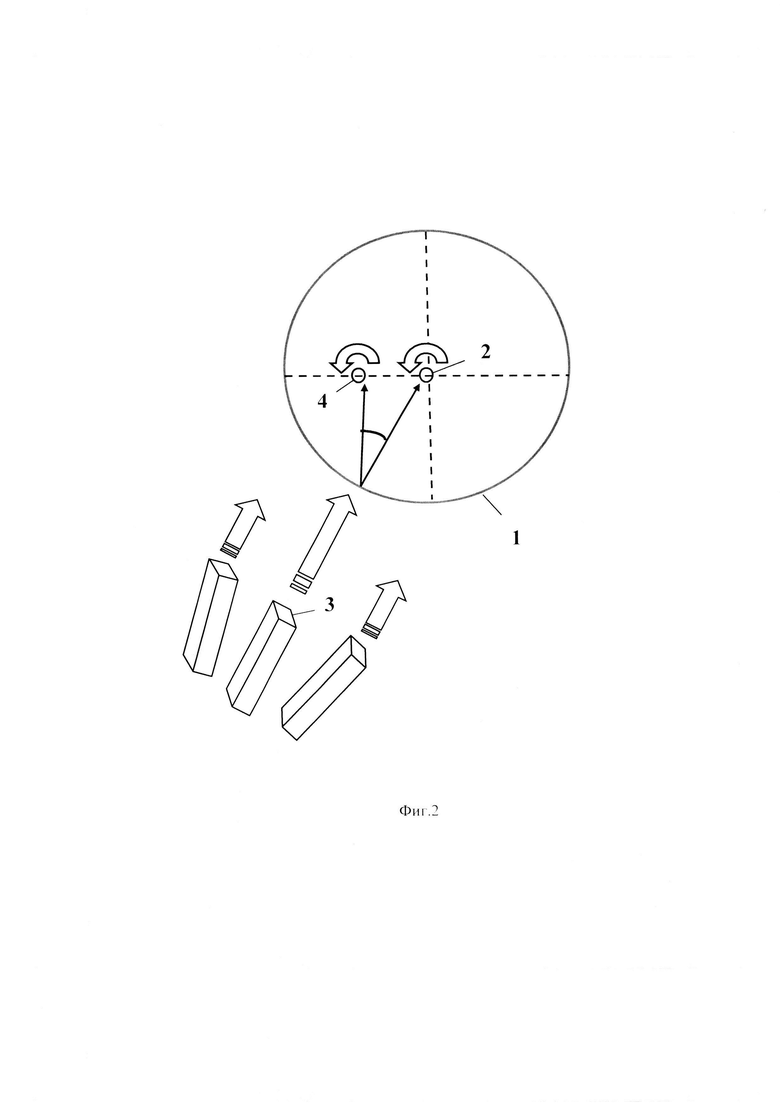
На фиг. 2 представлен рисунок, иллюстрирующий результат пространственного сканирования положения оси N-S (2) Земли (1), показанной со стороны северного полюса, и положения центра масс Земля Луна (4), через который проходит ось их совместного вращения. Из полученных данных сканирования выделяют сигналы, соответствующие частотам вращения оси (2) fз ~ 1.1606 *10-5 Гц и оси (4) fзл ~- 3.93 * 10-7 Гц. Рассчитывают угол между направлениями на оси с учетом периодического смещения оси (4) по дуге соответствующего радиуса вокруг центра Земли при изменении положения Земли и Луны в Солнечной системе. По этому углу однозначно определяет долготу места λ по времени запаздывания относительно нулевого меридиана.
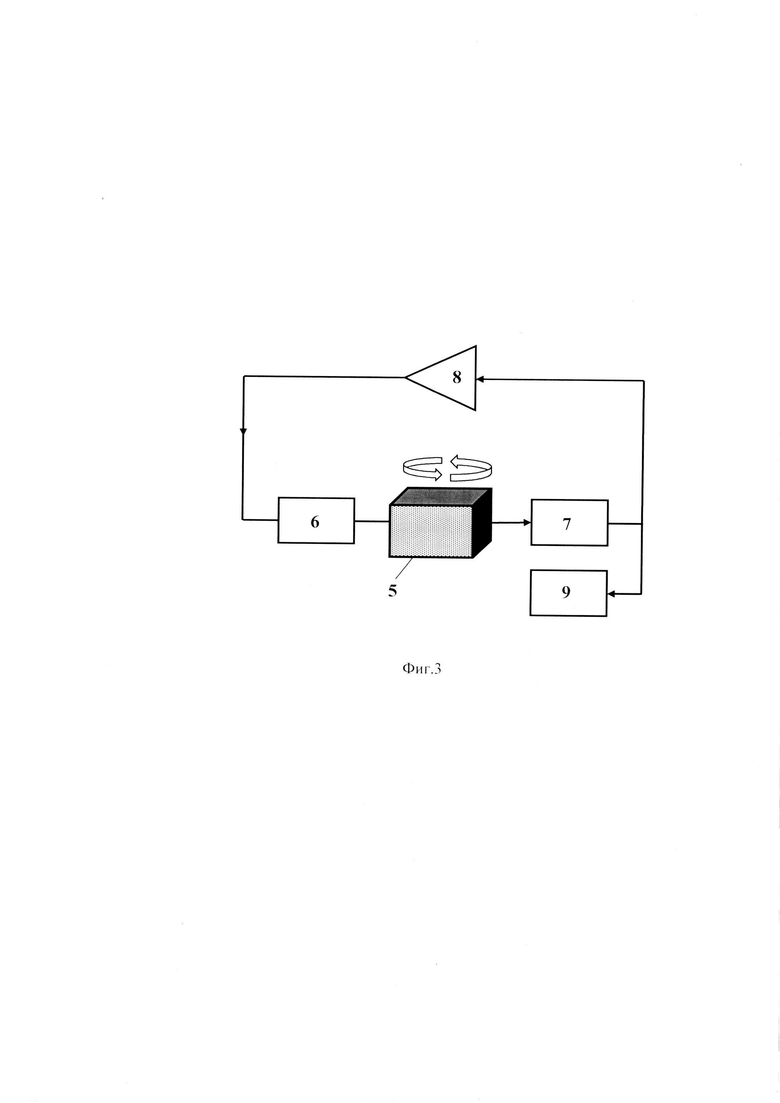
На фиг. 3 представлена блок-схема построения датчика вектора силы Кориолиса. Резонатор (5) представляет собой объем, заполненный газом и имеющий на входе электроакустический преобразователь (6), на выходе акустоэлектрический преобразователь (7). Выход преобразователя (7) подключен к входу усилителя (8), выход которого подключен к входу преобразователя (6). К выходу преобразователя (7) также подключено вычислительное устройство (9), анализирующее когерентный сигнал генератора и управляющее процессом сканирования навигационного пространства.
Для осуществления изобретения был создан макет датчика вектора сил Кориолиса и выполнены возможные на данном этапе исследований измерения.
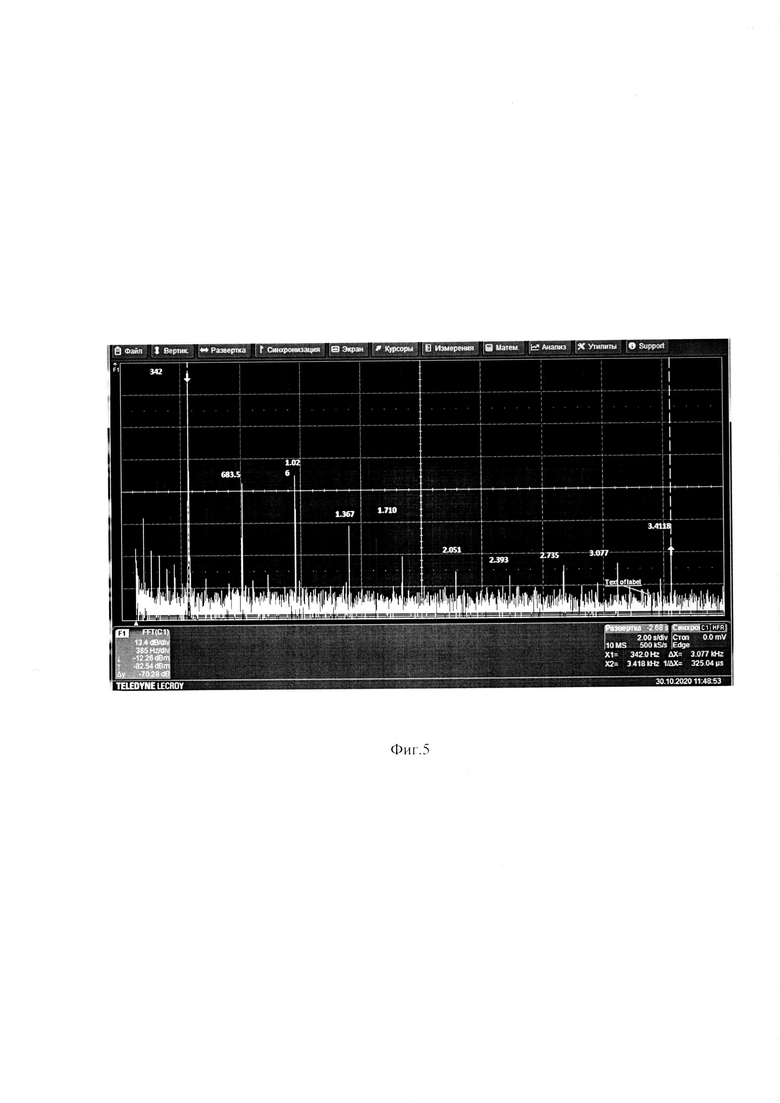
В качестве резонатора (5) был применен медный волновод с внутренним сечением 20 × 40 мм и эффективной длинной, соответствующей частоте резонанса основной моды f1=361,2 Гц при скорости звука в воздухе при 25°С.Vзв 346,2 м/с. Lэфф ~ 958 мм. Динамик и микрофон выполняли функции электроакустического преобразователя (6) и акустоэлектрического преобразователя (7). Усилитель (8) был выполнен с системой автоматической регулировки усиления (АРУ), которая позволяла усилить сигнал, циркулирующий по кольцу в режиме фазового синхронизма и ослабить некогерентные сигналы. АРУ обеспечивает усиление синфазных циркуляции до уровня выполнения баланса фаз и амплитуд, необходимого для возбуждения генерации. Возбуждается когерентный сигнал, зависящий только от геометрии резонатора и состояния газовой среды. Условия эти выполнимы потому, что из-за малой скорости звука задержка сигнала в кольце велика и определяется временем прохождения акустического сигнала только через резонатор (5). Задержкой в электронных блоках (6, 7, 8) можно пренебречь. В качестве вычислительного устройства (9) использовался спектроанализатор осциллографа HDO4054. позволяющий выполнить отсчет значений частоты с точностью до 10-6 для анализируемого диапазона частот. Преобразование Фурье выполнялось для интервала накопления 20 с при частоте выборок 5 105/с. Исходная конструкция резонатора показана на фиг. 4. Резонатор имел входной и выходной штуцеры для заполнения газом. Объем резонатора 0,8 л. В дальнейшем, для регистрации силы Кориолиса Земли, конструкция была дополнена системой термостатирования (25°С с точностью ~ 0,1°С) и помещена в закрытый цилиндрический контейнер для фиксации давления газа в объеме резонатора. Конструкция была установлена в систему сканирования пространства осью резонатора в диапазонах: 180° по вертикали и 60° по горизонтали. Измерения проводились в среде кислорода, в которой генератор формировал максимально широкий спектр - до 25 мод. Измерения проводились для вариаций частоты линии спектра моды 10. Соответствующий спектр представлен на фиг. 5. Цель этого эксперимента доказать принципиальную возможность регистрации силы Кориолиса Земли датчиком, рассмотренным как устройство, реализующее заявленный в изобретении способ навигации.
Исследование стабильности частоты когерентного генератора для десятой моды показали, что после прогрева установился постоянный монотонный дрейф частоты спектральной линии 10-й моды на уровне 0,2 Гц/час. Этот дрейф учитывался в оценке итоговых показаний. Ось резонатора датчика ориентировалась ортогонально оси вращения Земли для ϕ - 51°40' северной широты. Результат измерений по каждому направлению датчика усреднялся по 10 измерениям спектра. Последовательность измерений: 1) Установка в плоскости горизонт повернута на - 90° к выбранному направлению, f (- 90°) - 3417,740 Гц. 2) Установка ориентирована на ортогональное направление к оси Земли. F (0°) - 3417,860 Гц. 3) Установка в плоскости горизонта повернута на 90° к выбранному направлению. f (90°) - 3417.748 Гц. В эксперименте был выбран вариант неизменного наклона оси резонатора по отношению к горизонту для исключения влияния градиента давления газа при изменении высоты столба газа. Этот фактор необходимо учитывать при дальнейшей оптимизации параметров устройства. Эксперимент показал, что изменение ориентации датчика вектора силы Кориолиса Земли, для выбранных условий, соответствует сдвигу ~ 10-5 от резонансной частоты 10-й моды спектра сигнала когерентного генератора для среды кислорода при атмосферном давлении. Дальнейшая оптимизация параметров датчика, с целью повышения уровня полезного сигнала, возможна по ряду направлений: выбору геометрических параметров резонатора, состава газов, давления, температуры, алгоритма обработки данных с учетом базы сигнала.

Изобретение относится к области навигации. Предложенные способ и устройство предназначены для определения координат объекта. Сущность изобретения заключается в регистрации вектора гравитационного поля Земли, по которому определяют направление на центр Земли. Затем регистрируют фазу Луны по положению оси вращения центра масс Земля-Луна, производят вычисление долготы места. Далее пассивной локацией определяют ортогональное направление на ось вращения Земли, производят вычисление широты места по углу между этим направлением и направлением на центр Земли. Для осуществления способа используют датчик вектора сил Кориолиса - закрытый акустический резонатор, заполненный газом, являющийся составной частью генератора когерентных колебаний. Техническим результатом изобретения является построение навигационной системы с возможностью автономной регистрации местоположения. 2 н.п. ф-лы, 5 ил.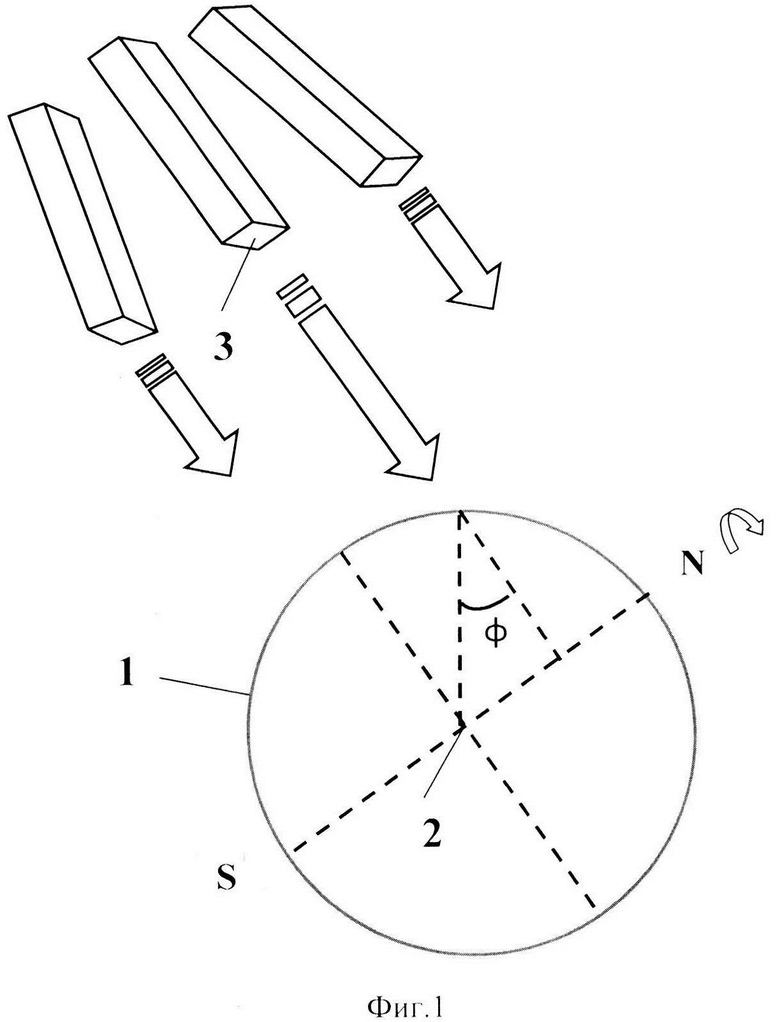
1. Способ навигации по вектору сил Кориолиса Земли, включающий регистрацию гравитационного поля Земли, отличающийся тем, что в качестве гироскопического датчика привязки к географическому направлению север-юг используют ось суточного вращения Земли, направление на которую, относительно объекта навигации, регистрируют с помощью пассивной пеленгации датчиком вектора силы Кориолиса, параметры которого зависят от направления этой силы и ориентации датчика, угловым сканированием датчика определяют ортогональное направление на ось вращения Земли и на ось вращения системы Земля-Луна вокруг общего центра масс, при этом по углу между ортогональным направлением на ось Земли и направлением вектора силы гравитации определяют широту места и по углу между ортогональным направлением на ось вращения системы Земля-Луна вокруг общего центра масс и направлением на ось вращения Земли определяют фазу Луны для данного места и вычисляют долготу места по текущему всемирному времени в момент регистрации.
2. Устройство, предназначенное для осуществления способа по п.1, содержащее когерентный генератор с запаздывающей обратной связью, создаваемой резонатором, включающим электроакустический и акустоэлектрический преобразователи, задержку в котором выполняет среда с малой скоростью распространения акустической волны, содержащее также вычислительное устройство, формирующее выходные данные, отличающееся тем, что содержит акустический резонатор закрытого типа, заполненный газом при фиксированных температуре и давлении, подключенный электроакустическим и акустоэлектрическим преобразователями в электрическую цепь обратной связи усилителя, являющегося составной частью многомодового генератора когерентных колебаний, создающего режим многолучевой интерференции бегущей волны в кольце усилитель-резонатор-усилитель, частоты спектра мод которого подвержены изменениям из-за возбуждения силой Кориолиса составляющей поперечных колебаний частиц в газовой среде по отношению к направлению на ось вращения, направлению, составляющему угол с варьируемым направлением продольных колебаний бегущей волны в резонаторе, что приводит к созданию диаграммы направленности резонатора для пассивной пеленгации направления по вариациям частот спектра.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ЕГО ОСНОВЕ | 2012 |
|
RU2520949C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГЕОГРАФИЧЕСКИЙ СЕВЕР С ИСПОЛЬЗОВАНИЕМ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ И ДАТЧИКА УГЛА НАКЛОНА | 2014 |
|
RU2578049C1 |
| МИКРОАКУСТОЭЛЕКТРОМЕХАНИЧЕСКИЙ ГИРОСКОП И СПОСОБ ЕГО РАБОТЫ | 2009 |
|
RU2389000C1 |
| US 7805993 B2, 05.10.2010 | |||
| CN 107063307 A, 18.08.2017. | |||

