Изобретение относится к устройствам автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава на линию сепарации сельскохозяйственной продукции, преимущественно клубней картофеля.
Известно устройство сортирования плодов, содержащее приемный бункер, подающий транспортер с выходным участком и полем обзора, блок распознавания объектов, сепарирующие модули (а. св. №935138, опубликовано 16.02.1982 г.). В устройстве отсутствуют блоки автоматического регулирования потоком объектов на сепарирующие модули в зависимости от параметров подаваемого потока объектов.
Известно устройство автоматического управления потоком плодоовощной продукции, содержащее бункер-накопитель, выгрузной транспортер, снабженный выходным участком и полем обзора и линию сепарации (а. св. №1788636 А1, опубликовано 15.09.1992 г.).
Недостатками этого устройства являются отсутствие автоматического управления подачи объектов на линию сепарации от приемного бункера в зависимости от фракционного состава слоя подаваемых объектов, неэффективная нагрузка вследствие отсутствия однослойной подачи и ожидаемой сгруженности потока объектов на линию сепарации или недогрузки линии сепарации. В устройстве отсутствуют блоки и модули управления потоком объектов от приемного бункера на линию сепарации в зависимости от изменяющихся непрерывно параметров подаваемого потока объектов.
Задачей изобретения является обеспечение автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава от приемного бункера и бункера загрузки на линию сепарации сельскохозяйственных объектов, преимущественно клубней картофеля, обеспечение эффективности сепарации основных технологических фракций по размерам путем регулирования скорости подачи загрузного транспортера в зависимости от фракционного состава слоя объектов, предупреждение сгруживания объектов или недогрузки перед входом на линию сепарации, снижение трудозатрат на систему управления процессом транспортирования объектов от приемного бункера к линии сепарации.
В результате использования предлагаемого изобретения обеспечивается автоматическая подача объектов на линию сепарации, заданная периодическая регистрация фракционного состава объектов и подача команды на привод-вариатор загрузочного транспортера линии сепарации, равномерное распределение потока объектов по ширине линии сепарации, щадящий режим приема многослойного потока объектов от приемного бункера, снижение трудозатрат на систему управления устройства.
Вышеуказанный технический результат достигается тем, что в предлагаемом устройстве автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава на линию сепарации, содержащем бункер загрузки объектов, загрузной транспортер, линию сепарации, приемный бункер, подающий транспортер, снабженный приводом, выходным участком и полем обзора, над выходным участком подающего транспортера установлен блок контроля объектов, блок контроля объектов выполнен в виде блока распознавания фракционного состава объектов, содержащий видеокамеру, модуль обработки сигнала видеокамеры, модуль распознавания контуров соприкасающихся объектов в поле обзора подающего транспортера, модуль регистрации текущего числа объектов в поле обзора, модуль сравнения текущего числа объектов с эталонным значением числа объектов и модуль подачи команды, при этом загрузной транспортер снабжен приводом-вариатором и модулем управления, причем модуль подачи команды блока распознавания соединен с модулем управления привода-вариатора загрузного транспортера, а над бункером загрузки установлен блок контроля уровня слоя объектов, содержащий модуль команды, который соединен с приводом подающего транспортера и с блоком распознавания, при этом на выходе приемного бункера по ширине подающего транспортера установлен модуль однослойной подачи объектов, выполненный в виде вращающихся валков с амортизирующей поверхностью.
Сущность предлагаемого изобретения поясняется фиг. 1, 2 и 3.
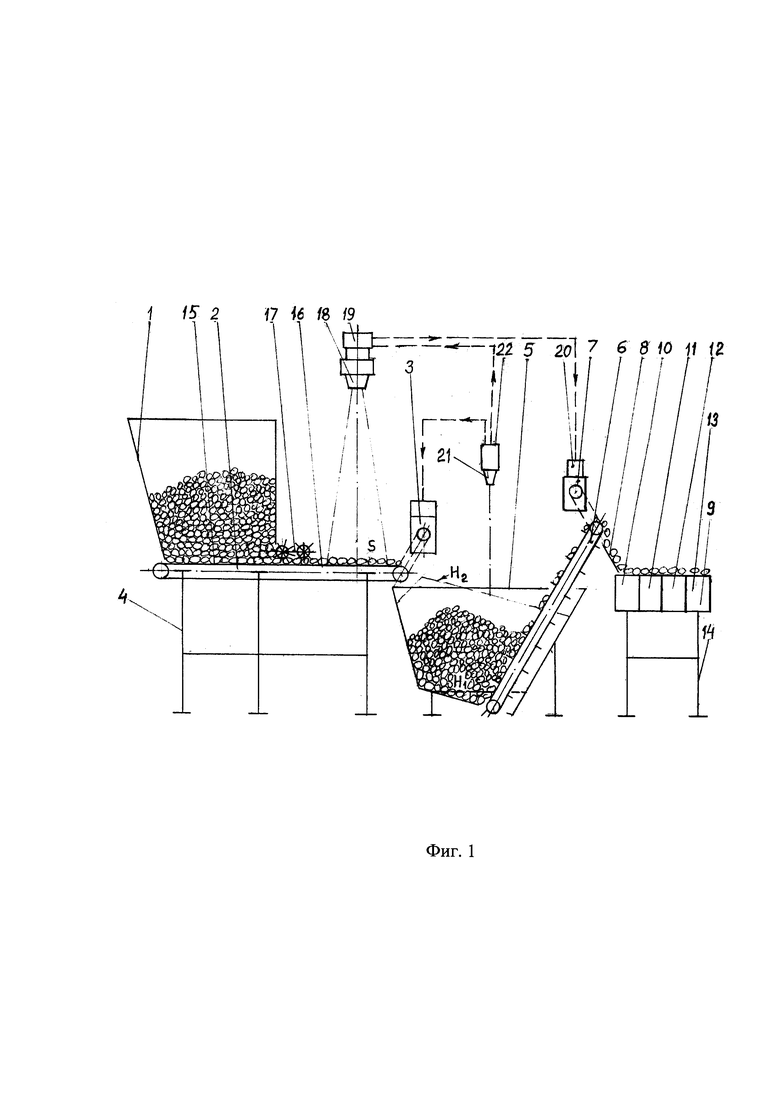
На фиг. 1 представлена общая схема поперечного разреза устройства.
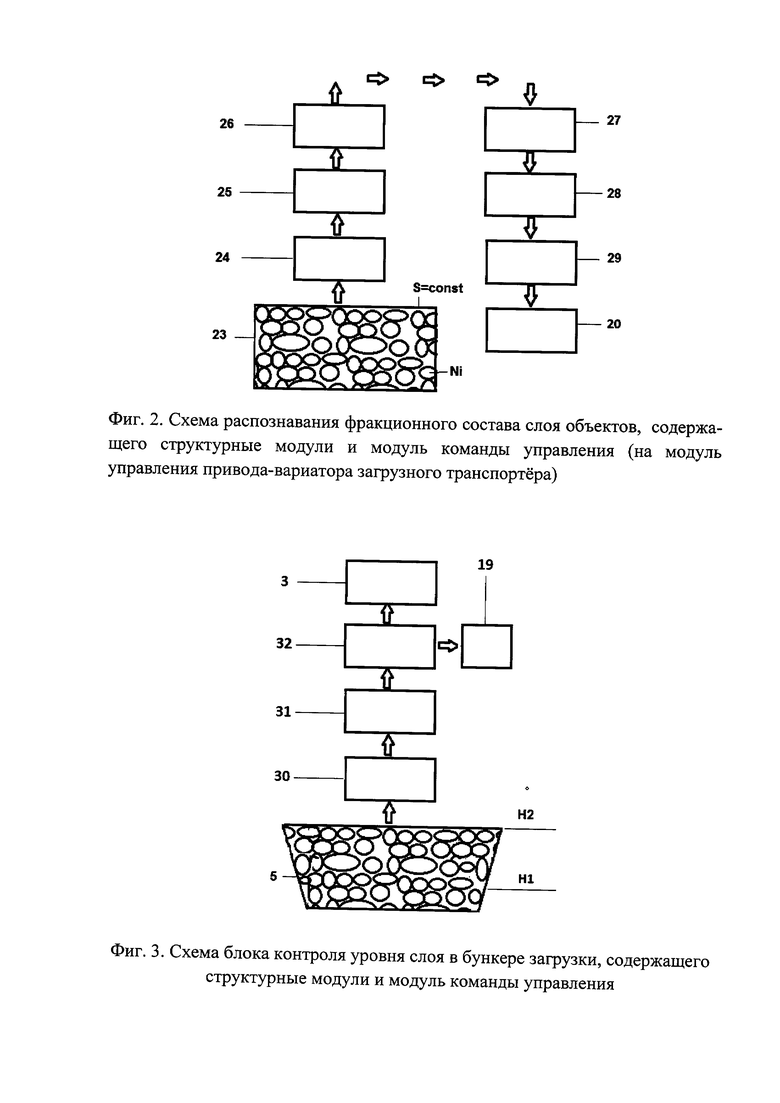
На фиг. 2 представлена схема блока распознавания фракционного состава слоя объектов, содержащего структурные модули и модуль команды управления (на модуль управления привода-вариатора загрузного транспортера).
На фиг. 3 представлена схема блока контроля уровня слоя в бункере загрузки, содержащего структурные модули и модуль команды управления.
Устройство содержит приемный бункер объектов переменного фракционного состава 1, подающий транспортер 2, расположенный под приемным бункером 1, привод 3 подающего транспортера 2, опору 4 приемного бункера 1 и подающего транспортера 2, бункер загрузки объектов 5, загрузной транспортер 6, снабженный приводом-вариатором 7, скатной лоток 8, линию сепарации 9, содержащую модули сепарации фракций объектов 10, 11, 12, 13 и опору 14. Приемный бункер 1 содержит входной участок 15 приема вороха объектов из помещения хранилища, выходной участок 16 и модуль однослойной подачи объектов 17, выполненный в виде вращающихся валков с амортизирующей поверхностью. Выходной участок 16 содержит зону S, над которой установлен видеоблок 18, регистрирующий состав вороха в зоне S перед подачей в бункер загрузки 5, и блок распознавания фракционного состава объектов 19. Привод-вариатор 7 загрузного транспортера 6 снабжен модулем управления 20. Над бункером загрузки 5 установлен блок 21 контроля нижнего H1 и верхнего Н2 уровня слоя объектов и модуль управления 22, связанный с приводом 3 подающего транспортера 2.
Схема блока распознавания фракционного состава слоя объектов 19 содержит в зоне S поле обзора слоя объектов 23 на выходном участке 16 подающего транспортера 2 (фиг. 2). Блок 19 содержит объектив видеокамеры 24, модуль обработки сигнала 25 видеокамеры 24, модуль распознавания контуров соприкасающихся объектов 26, модуль регистрации текущего числа Ni объектов 27, идентифицирующих параметры фракционного состава в поле обзора 23 зоны S, модуль сравнения 28 текущих значений числа Ni объектов с эталонным значением N, модуль принятия решения и управления 29 (подачи команды на модуль управления 20 привода-вариатора 7 загрузного транспортера 6). Схема блока контроля уровня слоя 21 в бункере загрузки представлена на фиг. 3. Блок 21 содержит датчик уровня слоя 30 в бункере 5 загрузки, модуль обработки сигнала 31 датчика 30, модуль команды управления 32, который соединен с приводом 3 подающего транспортера 2 и с блоком распознавания 19.
Устройство работает следующим образом. Объекты поступают в приемный бункер 1 от контейнеро-опрокидывателя или транспортера-подборщика объектов из напольного хранилища. Включение привода 3 производится по команде модуля 32, который срабатывает при нижнем уровне H1 слоя объектов. Объекты подаются транспортером 2 из приемного бункера 1. Модуль 17 выравнивает объекты в один слой перед выходным участком 16 и зоной S. После достижения слоем объектов в бункере загрузки 5 верхнего уровня Н2 модуль 32 подает команду отключения на привод 3. В поле зоны S проводится фаза контроля фракционного состава слоя объектов. Сигнал поступает от видеокамеры 24 последовательно на модуль обработки сигнала 25 видеокамеры 24, на модуль распознавания контуров соприкасающихся объектов 26, на модуль регистрации 27 текущего числа Ni объектов в поле зоны S и параметров фракционного состава, на модуль сравнения 28 текущего значения Ni с эталонным значением N, на модуль принятия решения и управления 29 (подачи команды). В случае отклонения Ni от установленных верхнего или нижнего пределов N за период заполнения объектами бункера загрузки 5 от уровня H1 до уровня Н2, подается сигнал на модуль управления 20 переключением скорости привода-вариатора 7 загрузного транспортера 6. Последний подает объекты через скатной лоток 8 на модули 10, 11, 12 и 13 линии сепарации 9. В период работы загрузного транспортера 6 до уровня H1 бункера загрузки 5 на выходном участке 16 подающего транспортера 2 включаются видеокамера 24 и модули 25, 26, 27, 28 и 29. После опустошения бункера загрузки 5 до уровня H1 от модуля 32 подается команда на включение привода 3 подающего транспортера 2 и от модуля 29 блока распознавания на модуль управления 20 привода-вариатора 7 загрузного транспортера 6. Модуль управления 20 увеличивает или уменьшает скорость загрузного транспортера 6. Таким образом, осуществляется автоматическое регулирование подачи объектов на линию сепарации 9. После полного заполнения бункера загрузки 5 модуль 32 подает команду на блок распознавания 19 и включение структурных модулей блока 19. Включается видеокамера 24 и производится оценка фракционного состава слоя объектов. Реализуется автоматический цикл работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ПЕРЕРАБОТКИ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ С АВТОМАТИЗИРОВАННОЙ СОРТИРОВКОЙ НЕОРГАНИЧЕСКОЙ ЧАСТИ И ПЛАЗМЕННОЙ ГАЗИФИКАЦИЕЙ ОРГАНИЧЕСКОГО ОСТАТКА | 2019 |
|
RU2731729C1 |
| РУДОСЕПАРАЦИОННЫЙ МОДУЛЬ | 2010 |
|
RU2422210C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| Способ и устройство трёхстадийного измельчения, смешивания малоценного растительного сырья и пищевых отходов для приготовления высокопитательных кормовых добавок | 2017 |
|
RU2655214C1 |
| Линия с оптической системой идентификации макро- и микроповреждений тканей корнеклубнеплодов и яблок | 2022 |
|
RU2780053C1 |
| УСТАНОВКА ДЛЯ ПЕРЕРАБОТКИ ХВОСТОВ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ | 2007 |
|
RU2336959C1 |
| Машина для уборки корнеплодов, картофеля и лука | 2023 |
|
RU2799653C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2024 |
|
RU2841013C1 |
| СПОСОБ ОБОГАЩЕНИЯ МИНЕРАЛИЗОВАННОЙ ГОРНОЙ МАССЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2151643C1 |
Изобретение относится к сельскому хозяйству, а именно к устройствам автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава на линию сепарации сельскохозяйственной продукции, преимущественно клубней картофеля. Устройство содержит бункер загрузки объектов, загрузной транспортер, линию сепарации, приемный бункер, подающий транспортер, снабженный приводом, выходным участком и полем обзора. Над выходным участком подающего транспортера установлен блок контроля объектов. Блок контроля объектов выполнен в виде блока распознавания фракционного состава объектов и содержит видеокамеру, модуль обработки сигнала видеокамеры, модуль распознавания контуров соприкасающихся объектов в поле обзора подающего транспортера, модуль регистрации текущего числа объектов в поле обзора, модуль сравнения текущего числа объектов с эталонным значением числа объектов и модуль подачи команды. Загрузной транспортер снабжен приводом-вариатором и модулем управления. Модуль подачи команды блока распознавания соединен с модулем управления привода-вариатора загрузного транспортера. Над бункером загрузки установлен блок контроля уровня слоя объектов, содержащий модуль команды, который соединен с приводом подающего транспортера и с блоком распознавания. На выходе приемного бункера по ширине подающего транспортера установлен модуль однослойной подачи объектов, выполненный в виде вращающихся валков с амортизирующей поверхностью. Использование изобретения позволит обеспечить автоматическое регулирование непрерывной подачи потока агрообъектов. 3 ил.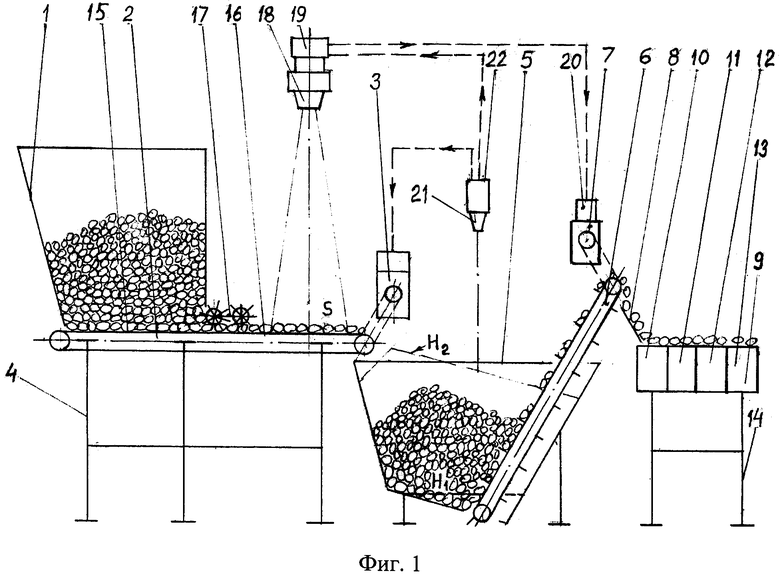
Устройство автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава на линию сепарации, содержащее бункер загрузки объектов, загрузной транспортер, линию сепарации, приемный бункер, подающий транспортер, снабженный приводом, выходным участком и полем обзора, над выходным участком подающего транспортера установлен блок контроля объектов, отличающееся тем, что блок контроля объектов выполнен в виде блока распознавания фракционного состава объектов, содержащего видеокамеру, модуль обработки сигнала видеокамеры, модуль распознавания контуров соприкасающихся объектов в поле обзора подающего транспортера, модуль регистрации текущего числа объектов в поле обзора, модуль сравнения текущего числа объектов с эталонным значением числа объектов и модуль подачи команды, при этом загрузной транспортер снабжен приводом-вариатором и модулем управления, причем модуль подачи команды блока распознавания соединен с модулем управления привода-вариатора загрузного транспортера, а над бункером загрузки установлен блок контроля уровня слоя объектов, содержащий модуль команды, который соединен с приводом подающего транспортера и с блоком распознавания, при этом на выходе приемного бункера по ширине подающего транспортера установлен модуль однослойной подачи объектов, выполненный в виде вращающихся валков с амортизирующей поверхностью.
| Устройство для сортировки плодов | 1980 |
|
SU935138A1 |
| US4134498A, 16.01.1979 | |||
| СЕПАРАТОР ДЛЯ ОЧИСТКИ КОРНЕКЛУБНЕПЛОДОВ | 1993 |
|
RU2093976C1 |
| Устройство для инспекции плодов | 1986 |
|
SU1704750A2 |

