Изобретение относится к области противовоздушной обороны стационарных объектов и преимущественно может быть использовано для обнаружения, сопровождения и нейтрализации беспилотных летательных аппаратов (БПЛА).
Известны система обнаружения и противодействия беспилотным летательным аппаратам (RU 2755603 С2, 2021) и система защиты от беспилотных летательных аппаратов в воздушном пространстве населенного пункта (RU 2746090 С2, 2021), которые в общей для них части содержат средство первичного обнаружения на основе всенаправленного лидара и GPS-приемника, средство распознавания на основе двух видеокамер, установленных на опорно-поворотном модуле, средство управления и классификации, выполненное с возможностью обработки информации от средств первичного обнаружения и распознавания, управления всеми средствами системы и классификации обнаруженного летательного аппарата, и средство нейтрализации, выполненное с возможностью радиоподавления сигналов управления обнаруженным БПЛА.
Известна система многофакторной защиты объектов от миниатюрных беспилотных летательных аппаратов (RU 2771865 С1, 2022), которая содержит многопозиционный радиолокационный обнаружитель, состоящий из разнесенных вокруг объекта передатчиков сигналов, выполненных с возможностью создания непрерывного поля радиолокационного контроля, и обработчика сигналов и радиолокационной информации, устройство оптического обнаружения и распознавания целей, состоящее из оптико-электронного средства и модуля обработки видеоданных, средство радиоэлектронного подавления бортовых приемных устройств каналов управления и навигации БПЛА и разнесенные вокруг объекта многоствольные пусковые пиротехнические установки, выполненные с возможностью создания протяженного облака поражающих элементов.
Известен многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению БПЛА малого класса (RU 2769037 C2, 2022), который содержит систему активной радиолокации, систему пассивной радиолокации, электронно-оптическую систему с поворотным устройством, систему радиоподавления, устройство обработки и хранения информации, а также рабочее место оператора.
Известна система предотвращения нарушений правил полетов беспилотными летательными аппаратами (RU 2701421 С1, 2019), которая содержит наземное средство обнаружения, выполненное в виде радиолокационной станции, БПЛА-перехватчик, снабженный бортовыми средствами обнаружения БПЛА-нарушителя и его захвата в виде сети, и соединенный с ними наземный центр контроля, выполненный с возможностью запроса у БПЛА-нарушителя его идентификационных данных и сравнения их с идентификационными данными, полученными от государственной системы регистрации и контроля БПЛА.
Однако, упомянутые выше технические решения не позволяют обеспечить достаточно эффективную защиту объекта, в особенности такого расположенного на значительной территории, как, например, аэропорт, поскольку обладают ограниченными возможностями по обнаружению и противодействию БПЛА, в особенности при их массовом налете, что обусловлено ограниченным составом входящих в них средств обнаружения БПЛА и их подавления.
Наиболее близкой по технической сущности к настоящему изобретению является известная система наблюдения и противодействия беспилотным летательным аппаратам (RU 2738508 С1, 2020), которая содержит наземный центр контроля воздушного пространства, средства обнаружения БПЛА и средства нейтрализации БПЛА.
Наземный центр контроля воздушного пространства ближайшего аналога настоящего изобретения включает соединенные интерфейсными линиями модемной связи управляющую электронную вычислительную машину (ЭВМ), автоматизированное рабочее место оператора центра контроля, выносной пульт управления системой и аппаратуру цифровой связи с выносным пультом управления, средствами обнаружения БПЛА и средствами нейтрализации БПЛА.
Средства обнаружения БПЛА содержат не менее одной радиолокационной станции кругового обзора с автоматизированным рабочим местом ее оператора и радиомодемом связи с аппаратуройцифровой связи центра контроля, не менее одной оптико-электронной системы обнаружения и сопровождения БПЛА, снабженной радиомодемом связи с аппаратурой цифровой связи центра контроля и выполненной с возможностью автосопровождения и идентификации типа БПЛА при работе в видимом и инфракрасном диапазонах электромагнитных волн, и не менее одной системы радиотехнической разведки, снабженной радиомодемом связи с аппаратурой цифровой связи центра контроля и выполненной с возможностью определения параметров средств связи и навигации бортовой аппаратуры БПЛА.
Средства нейтрализации содержат БПЛА-перехватчик, глушитель каналов связи, пусковую установку ракет с инфракрасной головкой самонаведения, зенитное орудие, лазерную установку для плавления пластмассовых корпусов БПЛА и радиолучевое устройство для дистанционного электрического пробоя электронной аппаратуры БПЛА.
Известная система наблюдения и противодействия беспилотным летательным аппаратам, являющаяся ближайшим аналогом, за счет расширения состава входящих в нее средств обнаружения и нейтрализации БПЛА по отношению к упомянутым выше аналогам обеспечивает, как это отмечено в описании изобретения, расширение функциональных возможностей и повышение надежности отражения массового налета БПЛА.
Вместе с тем возможности расширения арсенала технических средств защиты объектов от БПЛА упомянутыми выше аналогами далеко не исчерпаны.
В связи с этим, настоящее изобретение в некоторой степени решает актуальную техническую проблему, которая состоит в расширении арсенала средств защиты объектов от БПЛА, путем создания технического решения, альтернативного известным решениям, и обеспечивает достижение технического результата, заключающегося в реализации изобретением упомянутого назначения.
Поставленная техническая проблема решена и декларированный технический результат достигнут тем, что заявляемая система защиты объекта от беспилотных летательных аппаратов, содержащая, в соответствии с ближайшим аналогом, наземный центр контроля воздушного пространства в виде автоматизированного рабочего места оператора центра на основеперсональной ЭВМ с модулем информационного обмена и соединенные с модулем информационного обмена наземного центра контроля воздушного пространства, по меньшей мере, одну радиолокационную станцию кругового обзора, по меньшей мере, одну оптико-электронную систему обнаружения и сопровождения БПЛА, по меньшей мере, одну систему радиотехнической разведки, выполненную с возможностью определения параметров бортовых средств связи и навигации БПЛА, по меньшей мере, один глушитель каналов связи БПЛА, а также, по меньшей мере, один БПЛА-перехватчик, отличается от ближайшего аналога тем, что она содержит соединенные с модулем информационного обмена наземного центра контроля воздушного пространства, по меньшей мере, одну радиолокационную станцию растрового обзора, по меньшей мере, одну планшетную ЭВМ наблюдателя, выполненную с возможностью передачи цифровой информации и, по меньшей мере, одно автоматизированное рабочее место оператора БПЛА-перехватчика, содержащее персональную ЭВМ с консолью органов управления БПЛА и модулем радиосвязи с БПЛА.
При этом радиолокационная станция кругового обзора содержит радиолокационный обнаружитель с антенной кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости, снабженный запросчиком и приемником сигнала опознавания «свой-чужой», и соединенную с ним промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
Радиолокационная станция растрового обзора выполнена с возможностью осуществления строчного растрового обзора.
Радиолокационная станция растрового обзора содержит растровый радиолокационный обнаружитель на основе фазированной антенной решетки, снабженный запросчиком и приемником сигнала опознавания «свой-чужой», и соединенную с ним промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
Оптико-электронная система обнаружения и сопровождения БПЛА содержит последовательно соединенные блок объективов, блок матричных приемников оптического излучения видимого и инфракрасного диапазона длин волн, блок аналого-цифровых преобразователей и промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства, которые установлены на следящем приводе, соединенном с промышленной ЭВМ и выполненном с возможностью углового наведения по азимуту и углу места, и снабжена лазерным целеуказателем, установленным на следящем приводе и соединенным с промышленной ЭВМ.
Система радиотехнической разведки содержит последовательно соединенные широкополосную приемную антенну, широкополосный цифровой радиоприемник, анализатор спектра и промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
Глушитель каналов связи БПЛА содержит последовательно соединенные промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства, блок генераторов помех, блок усилителей помех и блок антенных излучателей, которые установлены на следящем приводе, соединенном с промышленной ЭВМ и выполненном с возможностью углового наведения по азимуту и углу места.
БПЛА-перехватчик содержит, по меньшей мере, одно средство нейтрализации БПЛА-нарушителя, бортовой вычислитель и соединенные с ним пилотажно-навигационное оборудование, курсовую FPV видеокамеру, оптико-электронный прицел, радиолокационный прицел-дальномер, приемник сигнала опознавания «свой-чужой», ответчик на сигнал опознавания «свой-чужой», модуль радиосвязи с автоматизированным рабочим местом оператора БПЛА-перехватчика и, по меньшей мере, один активатор средства нейтрализации.
В качестве средства нейтрализации БПЛА-нарушителя использовано средство распыления аэрозоля.
В качестве средства нейтрализации БПЛА-нарушителя использовано средство распыления мелкодисперсного электропроводящего порошка.
В качестве средства нейтрализации БПЛА-нарушителя использовано средство метания сетки.
В качестве средства нейтрализации БПЛА-нарушителя использовано средство развертывания захватывающей сетки.
В качестве средства нейтрализации БПЛА-нарушителя использован осколочно-фугасный боеприпас.
Система снабжена наземным пневматическим метательным устройством в виде трубы, которая установлена на станке, выполненном с возможностью углового наведения трубы по азимуту и углу места с помощью приводов, и снабжена резервуаром для воздуха высокого давления с управляемым клапаном, радиолокационным прицелом-дальномером, оптико-электронным модулем наведения и сопровождения и блоком управления на основе промышленной ЭВМ, соединенным с приводами, с радиолокационным прицелом-дальномером, с оптикоэлектронным модулем наведения и сопровождения, с управляемым клапаном и с модулем информационного обмена наземного центра контроля воздушного пространства.
Наземное пневматическое метательное устройство выполнено с возможностью метания осколочно-фугасного боеприпаса или тела, содержащего аэрозоль, или мелкодисперсный электропроводящий порошок, или сетку.
Снабжение системы защиты объекта от беспилотных летательных аппаратов соединенными с модулем информационного обмена наземного центра контроля воздушного пространства, по меньшей мере, одной радиолокационной станцией растрового обзора, по меньшей мере, одной планшетной ЭВМ наблюдателя, выполненной с возможностью передачи цифровой информации и, по меньшей мере, одним автоматизированным рабочим местом оператора БПЛА-перехватчика, содержащим персональную ЭВМ с консолью органов управления БПЛА и модулем радиосвязи с БПЛА, обеспечивает расширение арсенала средств защиты объектов от БПЛА.
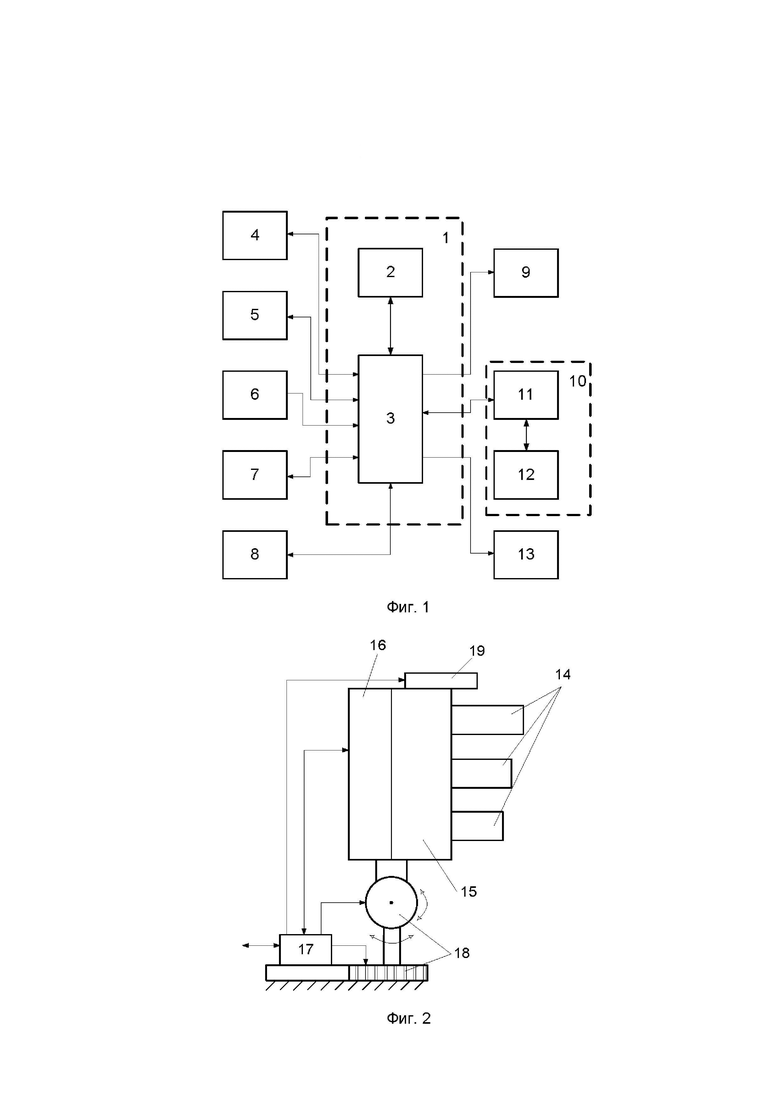
На фиг. 1 приведена структурная схема системы защиты объекта от беспилотных летательных аппаратов.
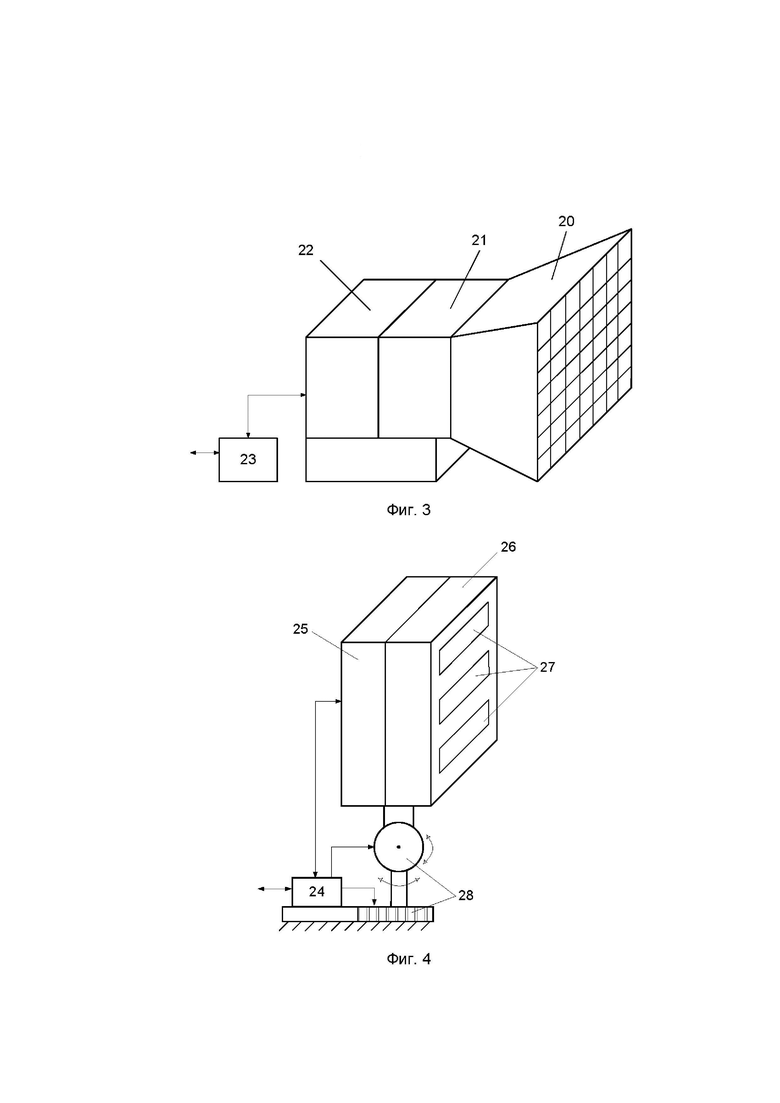
На фиг. 2 схематично показана оптико-электронная система обнаружения и сопровождения БПЛА.
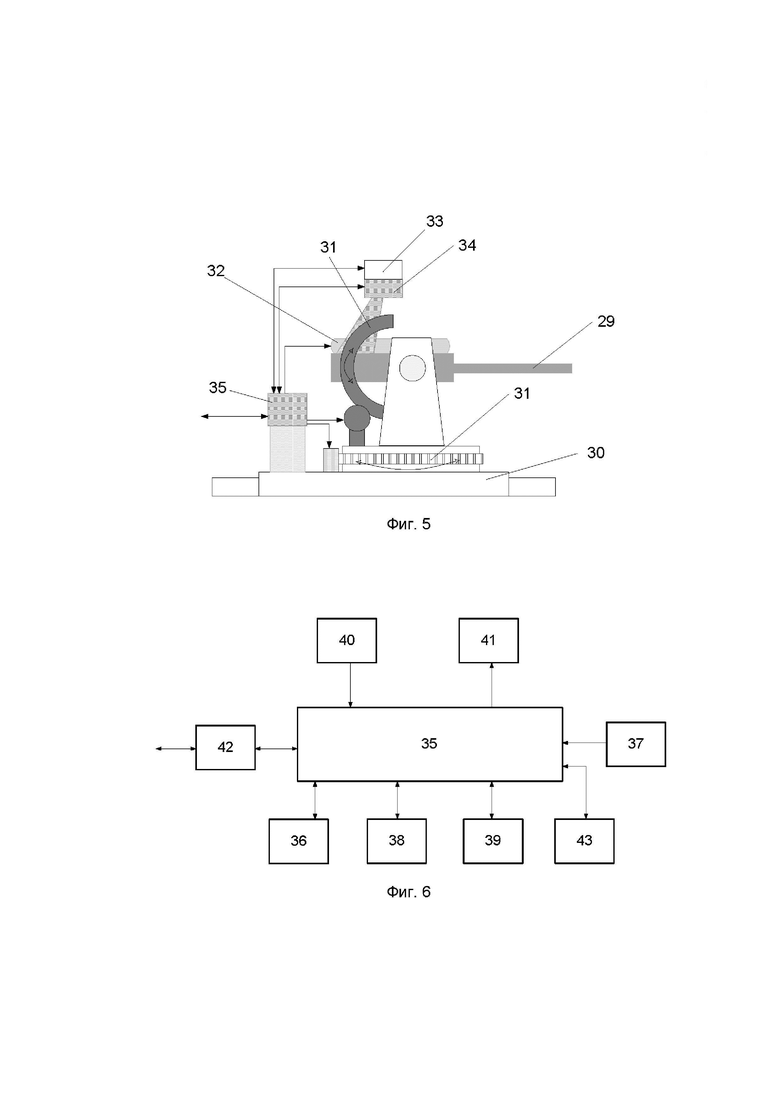
На фиг. 3 схематично показана система радиотехнической разведки.
На фиг. 4 схематично показан глушитель каналов связи БПЛА.
На фиг. 5 схематично показано наземное пневматическое метательное устройство.
На фиг. 6 приведена структурная схема бортовой аппаратуры БПЛА-перехватчика.
Система защиты объекта от беспилотных летательных аппаратов содержит размещенные на территории защищаемого объекта (см. фиг. 1) наземный центр 1 контроля воздушного пространства, который содержит автоматизированное рабочее место 2 оператора центра на основе персональной ЭВМ и соединенный с ней модуль 3 информационного обмена, выполненный с возможностью приема и передачи цифровой информации с использованием проводных каналов и радиоканалов связи.
В качестве средств контроля воздушного пространства и обнаружения БПЛА система защиты объекта от беспилотных летательных аппаратов содержит соединенные с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства, по меньшей мере, одну радиолокационную станцию 4 кругового обзора, по меньшей мере, одну оптико-электронную систему 5 обнаружения и сопровождения БПЛА, по меньшей мере, одну систему 6 радиотехнической разведки, выполненную с возможностью определения параметров бортовых средств связи и навигации БПЛА, по меньшей мере, одну радиолокационную станцию 7 растрового обзора и, по меньшей мере, одну планшетную ЭВМ 8 наблюдателя, выполненную с возможностью передачи по радиоканалу цифровой информации в модуль 4 информационного обмена наземного центра 1 контроля воздушного пространства.
Система защиты объекта от беспилотных летательных аппаратов содержит соединенные с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства, по меньшей мере, один глушитель 9 каналов связи БПЛА, по меньшей мере, одно автоматизированное рабочее место 10 оператора БПЛА-перехватчика, содержащее персональную ЭВМ 11 с консолью органов управления БПЛА и модулем 12 радиосвязи с БПЛА, и наземное пневматическое метательное устройство 13.
Радиолокационная станция 4 кругового обзора выполнена с обеспечением возможности обнаружения и определения азимута направления на БПЛА и наклонной дальности до него и содержит радиолокационный обнаружитель с антенной кругового обзора (на чертежах не показаны) с cosec2 лучом в угломестной плоскости и узким лучом вазимутальной плоскости, выполненный, например, по традиционной схеме (Гринкевич А.В. Радиолокация. - Минск: Белорусский государственный университет информатики и радиоэлектроники, 2015, с. 140) или по аналогии с ближайшим аналогом (RU 2738508 С1, 2020), и соединенную с ним промышленную ЭВМ, соединенную с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства. Упомянутая промышленная ЭВМ может быть выполнена на основе персональной ЭВМ с образованием автоматизированного рабочего места оператора радиолокационной станции 4 кругового обзора. При этом радиолокационный обнаружитель снабжен запросчиком и приемником сигнала опознавания «свой-чужой».
Оптико-электронная система 5 обнаружения и сопровождения БПЛА содержит (см. фиг. 2) последовательно соединенные блок 14 объективов, блок 15 матричных приемников оптического излучения видимого и инфракрасного диапазона длин волн, блок 16 аналого-цифровых преобразователей и промышленную ЭВМ 17, соединенную с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства, которые установлены на следящем приводе 18, соединенном с промышленной ЭВМ 17 и выполненном с возможностью углового наведения по азимуту и углу места. Оптико-электронная система 5 обнаружения и сопровождения БПЛА снабжена лазерным целеуказателем 19, установленным на следящем приводе 18 и соединенным с промышленной ЭВМ 17.
Радиолокационная станция 7 растрового обзора выполнена с возможностью осуществления строчного растрового обзора заданного сектора воздушного пространства и обеспечения возможности обнаружения и определения азимута и угла места направления на БПЛА, а также наклонной дальности до него. Радиолокационная станция 7 растрового обзора содержит растровый радиолокационный обнаружитель (на чертежах не показан) на основе фазированной антенной решетки, выполненный, например, по традиционной схеме (Гринкевич А.В. Радиолокация. - Минск: Белорусский государственный университет информатики и радиоэлектроники, 2015, с. 140-141), и соединенную с ним промышленную ЭВМ, соединенную с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства. Упомянутая промышленная ЭВМ может быть выполнена на основе персональной ЭВМ с образованием автоматизированного рабочего места оператора радиолокационной станции 7 растрового обзора. Растровый радиолокационный обнаружитель снабжен запросчиком и приемником сигнала опознавания «свой-чужой» (на чертежах не показаны).
Система радиотехнической разведки 6 выполнена с возможностью определения параметров бортовых средств связи и навигации БПЛА и содержит (см. фиг. 3) последовательно соединенные широкополосную приемную антенну 20, широкополосный цифровой радиоприемник 21, анализатор 22 спектра и промышленную ЭВМ 23, соединенную с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства.
Глушитель 9 каналов связи БПЛА содержит (см. фиг. 4) последовательно соединенные промышленную ЭВМ 24, соединенную с модулем информационного обмена 3 наземного центра 1 контроля воздушного пространства, блок 25 генераторов помех, блок 26 усилителей помех и блок 27 антенных излучателей, которые установлены на следящем приводе 28, соединенном с промышленной ЭВМ 24 и выполненном с возможностью углового наведения по азимуту и углу места.
Наземное пневматическое метательное устройство 13 выполнено с возможностью метания осколочно-фугасного боеприпаса или тела, содержащего аэрозоль, или мелкодисперсный электропроводящий порошок, или сетку. Наземное пневматическое метательное устройство 13 (см. фиг. 5) выполнено в виде трубы 29, которая установлена на станке 30, выполненном с возможностью углового наведения трубы 29 по азимуту и углу места с помощью приводов 31, и снабжена резервуаром 32 для воздуха высокого давления с управляемым клапаном (на чертеже не показан), радиолокационным прицелом-дальномером 33, оптикоэлектронным модулем 34 наведения и сопровождения и блоком 35 управления на основе промышленной ЭВМ, который соединен с приводами 31, с радиолокационным прицелом-дальномером 33, с оптико-электронным модулем 34 наведения и сопровождения, с управляемым клапаном и с модулем 3 информационного обмена наземного центра 1 контроля воздушного пространства.
Использование в заявляемой системе наземного пневматического метательного устройства 13, позволяющего выполнять метание тела, содержащего или аэрозоль, или мелкодисперсный электропроводящий порошок, или сетку, обеспечивает возможность ее применения для защиты от БПЛА объектов, условия эксплуатации которых исключают возможность применения таких пиротехнических средств нейтрализации БПЛА-нарушителей, как зенитных артиллерийских орудий, ракет и боеприпасов осколочно-фугасного действия.
В составе бортовой аппаратуры БПЛА-перехватчик содержит (см. фиг. 6) бортовой вычислитель 35 и соединенные с ним пилотажнонавигационное оборудование 36, курсовую FPV видеокамеру 37, оптикоэлектронный прицел 38, радиолокационный прицел-дальномер 39, приемник 40 сигнала опознавания «свой-чужой», ответчик 41 на сигнал опознавания «свой-чужой», модуль 42 радиосвязи с автоматизированным рабочим местом 10 оператора БПЛА-перехватчика и, по меньшей мере, один активатор 43 средства нейтрализации.
БПЛА-перехватчик также содержит, по меньшей мере, одно средство нейтрализации БПЛА-нарушителя (на чертежах не показано), в качестве которого использовано средство распыления аэрозоля, или средство распыления мелкодисперсного электропроводящего порошка, или средство метания сетки, или средство развертывания захватывающей сетки, или осколочно-фугасный боеприпас, причем активатор 43 средства нейтрализации выполнен с возможностью задействования средства нейтрализации БПЛА-нарушителя.
Система защиты объекта от беспилотных летательных аппаратов работает следующим образом.
С целью обнаружения возможного приближения к защищаемому объекту БПЛА-нарушителя под управлением наземного центра 1 контроля воздушного пространства с автоматизированного рабочего места 2 оператора центра через модуль 3 информационного обмена одновременно функционируют, по меньшей мере, одна радиолокационная станция 4 кругового обзора, осуществляя зондирование радиосигналом окружающего воздушного пространства и прием отраженного окружающими объектами радиосигнала, и, по меньшей мере, одна система радиотехнической разведки 6, принимая из окружающего пространства радиосигналы спомощью широкополосной приемной антенны 20 и широкополосного цифрового радиоприемника 21 и обрабатывая их анализатором 22 спектра и промышленной ЭВМ 23. Результаты зондирования с радиолокационной станции 4 кругового обзора и системы радиотехнической разведки 6 передаются через модуль 3 информационного обмена на автоматизированное рабочее место 2 оператора центра, где анализируются его оператором.
Кроме того, по меньшей мере, один наблюдатель, патрулирующий периметр защищаемого объекта, осуществляет визуальное наблюдение воздушного пространства, используя оптические средства визуального обнаружения, работающие в видимом и, при необходимости, в инфракрасном диапазонах оптического излучения. В случае визуального обнаружения наблюдателем БПЛА-нарушителя он, используя планшетную ЭВМ 8 наблюдателя, передает по радиоканалу через модуль 3 информационного обмена на автоматизированное рабочее место 2 оператора центра информацию о факте обнаружения БПЛА-нарушителя, а также об азимуте и угле места направления на БПЛА-нарушитель.
При появлении в поле обзора БПЛА-нарушителя радиолокационная станция 4 кругового обзора обнаруживает его и определяет азимут направления на БПЛА-нарушитель и наклонную дальность до него, после чего через модуль 3 информационного обмена передает эту информацию на автоматизированное рабочее место 2 оператора центра 1 контроля воздушного пространства.
По получении упомянутой информации оператор центра 1 контроля воздушного пространства с автоматизированного рабочего места 2 через модуль 3 информационного обмена выдает команду на включение радиолокационной станции 7 растрового обзора, которая выполняет обнаружение БПЛА-нарушителя и определение азимута и угла места направления на него, а также наклонную дальность до БПЛА-нарушителя, после чего через модуль 3 информационного обмена передает полученную информацию на автоматизированное рабочее место 2 оператора центра 1 контроля воздушного пространства.
После получения этой информации оператор центра 1 контроля воздушного пространства с автоматизированного рабочего места 2 через модуль 3 информационного обмена передает на промышленную ЭВМ 17оптико-электронной системы 5 обнаружения и сопровождения БПЛА команду на ее включение и значения углов целеуказания (азимута и угла места направления на БПЛА-нарушитель), вычисленных на основании полученной от радиолокационной станции 7 растрового обзора координатной информации. Под управлением промышленной ЭВМ 17 на основании полученных значений углов целеуказания следящий привод 18 наводит по азимуту и углу места блок 14 объективов с блоком 15 матричных приемников оптического излучения и блоком 16 аналого-цифровых преобразователей на БПЛА-нарушитель, с помощью которых оптикоэлектронная система 5 обнаруживает БПЛА-нарушитель, получает его цифровые изображения в видимом и инфракрасном диапазонах оптического излучения, поступающие в промышленную ЭВМ 17, и сопровождает БПЛА-нарушитель за счет разворота по азимуту и углу места с помощью следящего привода 18, управляемого промышленной ЭВМ 17. Полученные оптико-электронной системой 5 обнаружения и сопровождения БПЛА цифровые изображения БПЛА-нарушителя и значения азимута и угла места направления на него промышленной ЭВМ 17 передаются через модуль 3 информационного обмена на автоматизированное рабочее место 2 оператора центра 1 контроля воздушного пространства.
Кроме того, по команде с промышленной ЭВМ 17 при сопровождении БПЛА-нарушителя оптико-электронной системой 5 включается установленный на ее следящем приводе 18 лазерный целеуказатель 19, которым подсвечивается БПЛА-нарушитель.
В случае, когда БПЛА-нарушитель управляется по радиоканалу, система радиотехнической разведки 6, принимая из окружающего пространства радиосигналы с помощью широкополосной приемной антенны 20 и широкополосного цифрового радиоприемника 21 и обрабатывая их анализатором 22 спектра и промышленной ЭВМ 23, также обнаруживает БПЛА-нарушитель, определяет частоту и амплитудно-временные характеристики сигналов управления и через модуль 3 информационного обмена передает эту информацию на автоматизированное рабочее место 2 оператора центра 1 контроля воздушного пространства.
В этом случае оператор центра 1 контроля воздушного пространства принимает решение нейтрализовать БПЛА-нарушитель средствами радиоэлектронной борьбы, для чего с автоматизированного рабочего места 2 оператора через модуль 3 информационного обмена передает на промышленную ЭВМ 24 глушителя 9 каналов связи БПЛА команду на его включение, а также значения углов целеуказания (азимута и угла места направления на БПЛА-нарушитель), вычисленных на основании полученной от радиолокационной станции 7 растрового обзора и оптико-электронной системы 5 обнаружения и сопровождения БПЛА координатной информации. Под управлением промышленной ЭВМ 24 следящий привод 28 наводит по азимуту и углу места блок 27 антенных излучателей на БПЛА-нарушитель, который облучает БПЛА-нарушитель помехами, сформированными блоком 25 генераторов помех и усиленными блоком 26 усилителей помех, заглушая радиосигналы управления им.
Факт нейтрализации БПЛА-нарушителя глушителем 9 каналов связи БПЛА отображается на автоматизированном рабочем месте 2 оператора центра 1 контроля воздушного пространства на основании информации, которая поступает через модуль информационного обмена 3 от радиолокационной станции 4 кругового обзора, радиолокационной станции 7 растрового обзора и оптико-электронной системы 5 обнаружения и сопровождения БПЛА, а также с планшетной ЭВМ 8 наблюдателя.
В случае, если нейтрализация БПЛА-нарушителя глушителем 9 каналов связи БПЛА не удалась, оператор центра 1 контроля воздушного пространства принимает решение нейтрализовать БПЛА-нарушитель с использованием наземного пневматического метательного устройства 13, для чего с автоматизированного рабочего места 2 оператора через модуль информационного обмена передает в блок 35 управления на основе промышленной ЭВМ команду на его включение, а также значения углов целеуказания (азимута и угла места направления на БПЛА-нарушитель), вычисленных на основании полученной от радиолокационной станции 7 растрового обзора и оптико-электронной системы 5 обнаружения и сопровождения БПЛА координатной информации. Под управлением блока 35 управления согласно полученному угловому целеуказанию приводы 31 осуществляют предварительное наведение трубы 29 наземного пневматического метательного устройства 13 на БПЛА-нарушитель по азимуту и углу места.
Одновременно по команде с блока 35 управления включаются радиолокационный прицел-дальномер 33 и оптико-электронный модуль 34 наведения и сопровождения наземного пневматического метательного устройства 13.
Оптико-электронный модуль 34 наведения и сопровождения обнаруживает БПЛА-нарушитель, определяет значения азимута и угла места направления на него и передает эти значения в блок 35 управления, под управлением которого приводы 31 осуществляют разворот по азимуту и углу места трубы 29 вместе с оптико-электронным модулем 34 наведения и сопровождения, обеспечивая наведение и сопровождение БПЛА-нарушителя.
При этом радиолокационный прицел-дальномер 33, облучая БПЛА-нарушитель зондирующим радиосигналом и принимая отраженный им радиосигнал, определяет наклонную дальность до БПЛА-нарушителя и передает ее значение через блок 35 управления и модуль 3 информационного обмена на автоматизированное рабочее место 2 оператора центра 1 контроля воздушного пространства.
Когда в результате приближения БПЛА-нарушителя к защищаемому объекту дальность до него уменьшится до значения, соответствующего дальности эффективного действия наземного пневматического метательного устройства 13, оператор центра 1 контроля воздушного пространства принимает решение о нейтрализации БПЛА-нарушителя, для чего выдает соответствующую команду с автоматизированного рабочего места 2 оператора через модуль 3 информационного обмена на блок 35 управления наземного пневматического метательного устройства 13.
В результате по сигналу с блока 35 управления открывается управляемый клапан (на чертежах не показан) резервуара 32 для воздуха высокого давления, под действием которого из трубы 29 выбрасывается в направлении БПЛА-нарушителя осколочно-фугасный боеприпас или тело, содержащее аэрозоль, или мелкодисперсный электропроводящий порошок, или сетку, обеспечивающие нейтрализацию БПЛА-нарушителя.
Факт нейтрализации БПЛА-нарушителя наземным пневматическим метательным устройством 13 отображается на автоматизированном рабочем месте 2 оператора центра 1 контроля воздушного пространства на основании информации, которая поступает через модуль информационного обмена 3 от радиолокационной станции 4 кругового обзора, радиолокационной станции 7 растрового обзора и оптико-электроннойсистемы 5 обнаружения и сопровождения БПЛА, а также с планшетной ЭВМ 8 наблюдателя.
В случае, если нейтрализация БПЛА-нарушителя с помощью наземного пневматического метательного устройства 13 не состоялась, оператор центра 1 контроля воздушного пространства принимает решение нейтрализовать БПЛА-нарушитель с использованием БПЛА-перехватчика, для чего с автоматизированного рабочего места 2 оператора через модуль 3 информационного обмена передает на автоматизированное рабочее место 10 оператора БПЛА-перехватчика команду на его запуск и значения целеуказания (азимута и угла места направления на БПЛА-нарушитель, а также дальности до него), вычисленных на основании полученной от радиолокационной станции 7 растрового обзора и оптико-электронной системы 5 обнаружения и сопровождения БПЛА координатной информации.
Работая на персональной ЭВМ 11 и консоли органов управления БПЛА, оператор БПЛА-перехватчика через модуль 12 радиосвязи с БПЛА и модуль 42 радиосвязи с автоматизированным рабочим местом 10 оператора БПЛА-перехватчика вводит значения целеуказания и команду на запуск в его бортовой вычислитель 35, который включает курсовую FPV видеокамеру 37, оптико-электронный прицел 38, радиолокационный прицел- дальномер 39, приемник 40 сигнала опознавания «свой-чужой» и ответчик 41 на сигнал опознавания «свой-чужой», а также управляет пилотажнонавигационным оборудованием 36, обеспечивая запуск и полет БПЛА-перехватчика в направлении БПЛА-нарушителя.
Во время полета БПЛА-перехватчика его приемник 40 сигнала опознавания «свой-чужой» принимает радиозапросы от запросчиков сигнала опознавания «свой-чужой» радиолокационной станции 4 кругового обзора и радиолокационной станции 7 растрового обзора, передает их в бортовой вычислитель 35, по команде которого ответчик 41 на сигнал опознавания «свой-чужой» передает соответствующие радиосигналы на приемники сигнала опознавания «свой-чужой» радиолокационной станции 4 кругового обзора и радиолокационной станции 7 растрового обзора, что не позволяет БПЛА-перехватчику служить помехой для их работы.
Оптико-электронный прицел 38 обнаруживает БПЛА-нарушитель, подсвеченный лазерным целеуказателем 19 оптико-электронной системы 5, определяет его угловые приборные координаты и передает их в бортовойвычислитель 35, который на основании значений угловых координат и значения дальности до БПЛА-нарушителя, полученного от радиолокационного прицела-дальномера 39, определяет сигналы управления пилотажно-навигационным оборудованием 36, для наведения БПЛА-перехватчика в прогнозируемую точку встречи с БПЛА-нарушителем.
В процессе всего полета БПЛА-перехватчика курсовая FPV видеокамера 37 формирует сигнал видеоизображения, который через бортовой вычислитель 35, модуль 42 радиосвязи с автоматизированным рабочим местом 10 оператора БПЛА-перехватчика и модуль 12 радиосвязи с БПЛА поступает в персональную ЭВМ 11 автоматизированного рабочего места 10 оператора БПЛА-перехватчика для отображения этого видеоизображения оператору, позволяя не только контролировать процесс перехвата, но при необходимости перейти к ручному управлению БПЛА-перехватчиком с помощью консоли органов управления БПЛА.
Когда в результате сближения БПЛА-перехватчика с БПЛА-нарушителем текущее значение дальности до него уменьшится до значения, которое соответствует дальности, обеспечивающей эффективное воздействие средства нейтрализации на БПЛА-нарушителя, бортовой вычислитель 35 выдает команду на активатор 43 средства нейтрализации, который задействует одно из средств нейтрализации, т.е. или средство распыления аэрозоля, или средство распыления мелкодисперсного электропроводящего порошка, или средство метания сетки, или средство развертывания захватывающей сетки, или осколочно-фугасный боеприпас.
Факт нейтрализации БПЛА-нарушителя средствами нейтрализации БПЛА-перехватчика отображается на автоматизированном рабочем месте 10 оператора БПЛА-перехватчика видеоизображением, полученным с помощью курсовой FPV видеокамеры 37, и на автоматизированном рабочем месте 2 оператора центра 1 контроля воздушного пространства на основании информации, которая поступает через модуль информационного обмена 3 от радиолокационной станции 4 кругового обзора, радиолокационной станции 7 растрового обзора и оптико-электронной системы 5 обнаружения и сопровождения БПЛА, а также с планшетной ЭВМ 8 наблюдателя.
В случае неудачного применения одного из средств нейтрализации БПЛА-нарушителя оператор с автоматизированного рабочего места 10оператора БПЛА-перехватчика имеет возможность подать команду на задействование другого средства нейтрализации, имеющегося на борту БПЛА-перехватчика.
После успешной нейтрализации БПЛА-нарушителя БПЛА-перехватчик по команде оператора с автоматизированного рабочего места 10 оператора БПЛА-перехватчика приземляется с помощью парашютной системы.
Таким образом, настоящее изобретение решает актуальную техническую проблему, которая состоит в расширении арсенала средств защиты объектов от БПЛА, путем создания технического решения, альтернативного известным решениям, и обеспечивает достижение технического результата, заключающегося в реализации изобретением упомянутого назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЙ ПРАВИЛ ПОЛЕТОВ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2701421C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2757094C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2019 |
|
RU2725928C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
Система защиты объекта от беспилотных летательных аппаратов (БПЛА) содержит наземный центр контроля воздушного пространства, включающий автоматизированное рабочее место оператора на основе персональной ЭВМ с модулем информационного обмена, модуль информационного обмена наземного центра контроля воздушного пространства, а также содержит по меньшей мере одну радиолокационную станцию кругового обзора, оптико-электронную систему обнаружения и сопровождения БПЛА, систему радиотехнической разведки, выполненную с возможностью определения параметров бортовых средств связи и навигации БПЛА, по меньшей мере один глушитель каналов связи БПЛА, БПЛА-перехватчик, по меньшей мере одну радиолокационную станцию растрового обзора, планшетную ЭВМ наблюдателя, автоматизированное рабочее место оператора БПЛА-перехватчика, включающее персональную ЭВМ с консолью органов управления БПЛА и модуль радиосвязи с БПЛА. Обеспечивается расширение арсенала средств защиты объектов от БПЛА. 14 з.п. ф-лы, 6 ил.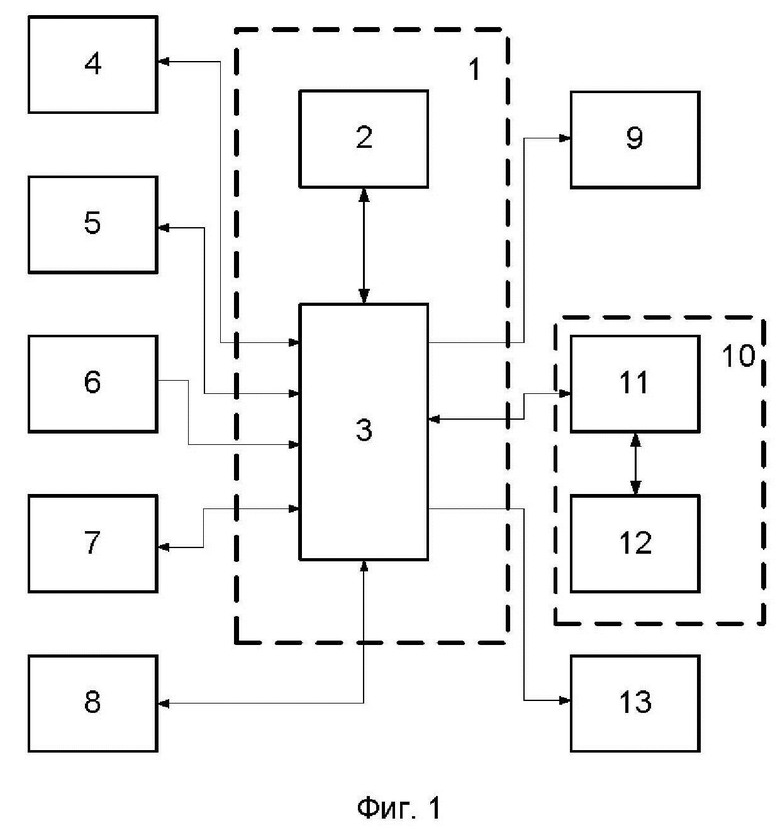
1. Система защиты объекта от беспилотных летательных аппаратов (БПЛА), содержащая наземный центр контроля воздушного пространства в виде автоматизированного рабочего места оператора центра на основе персональной ЭВМ с модулем информационного обмена и соединенные с модулем информационного обмена наземного центра контроля воздушного пространства по меньшей мере одну радиолокационную станцию кругового обзора, по меньшей мере одну оптико-электронную систему обнаружения и сопровождения БПЛА, по меньшей мере одну систему радиотехнической разведки, выполненную с возможностью определения параметров бортовых средств связи и навигации БПЛА, по меньшей мере один глушитель каналов связи БПЛА, а также по меньшей мере один БПЛА-перехватчик, отличающаяся тем, что она содержит соединенные с модулем информационного обмена наземного центра контроля воздушного пространства, по меньшей мере одну радиолокационную станцию растрового обзора, по меньшей мере одну планшетную ЭВМ наблюдателя, выполненную с возможностью передачи цифровой информации и по меньшей мере одно автоматизированное рабочее место оператора БПЛА-перехватчика, содержащее персональную ЭВМ с консолью органов управления БПЛА и модулем радиосвязи с БПЛА.
2. Система по п. 1, отличающаяся тем, что радиолокационная станция кругового обзора содержит радиолокационный обнаружитель с антенной кругового обзора с cosec2 лучом в угломестной плоскости и узким лучом в азимутальной плоскости, снабженный запросчиком и приемником сигнала опознавания «свой-чужой», и соединенную с ним промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
3. Система по п. 1, отличающаяся тем, что радиолокационная станция растрового обзора выполнена с возможностью осуществления строчного растрового обзора.
4. Система по п. 1 или 3, отличающаяся тем, что радиолокационная станция растрового обзора содержит растровый радиолокационный обнаружитель на основе фазированной антенной решетки, снабженный запросчиком и приемником сигнала опознавания «свой-чужой», и соединенную с ним промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
5. Система по п. 1, отличающаяся тем, что оптико-электронная система обнаружения и сопровождения БПЛА содержит последовательно соединенные блок объективов, блок матричных приемников оптического излучения видимого и инфракрасного диапазона длин волн, блок аналого-цифровых преобразователей и промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства, которые установлены на следящем приводе, соединенном с промышленной ЭВМ и выполненном с возможностью углового наведения по азимуту и углу места, и снабжена лазерным целеуказателем, установленным на следящем приводе и соединенным с промышленной ЭВМ.
6. Система по п. 1, отличающаяся тем, что система радиотехнической разведки содержит последовательно соединенные широкополосную приемную антенну, широкополосный цифровой радиоприемник, анализатор спектра и промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства.
7. Система по п. 1, отличающаяся тем, что глушитель каналов связи БПЛА содержит последовательно соединенные промышленную ЭВМ, соединенную с модулем информационного обмена наземного центра контроля воздушного пространства, блок генераторов помех, блок усилителей помех и блок антенных излучателей, которые установлены на следящем приводе, соединенном с промышленной ЭВМ и выполненном с возможностью углового наведения по азимуту и углу места.
8. Система по п. 1, отличающаяся тем, что БПЛА-перехватчик содержит по меньшей мере одно средство нейтрализации БПЛА-нарушителя, бортовой вычислитель и соединенные с ним пилотажно-навигационное оборудование, курсовую FPV видеокамеру, оптико-электронный прицел, радиолокационный прицел-дальномер, приемник сигнала опознавания «свой-чужой», ответчик на сигнал опознавания «свой-чужой», модуль радиосвязи с автоматизированным рабочим местом оператора БПЛА-перехватчика и по меньшей мере один активатор средства нейтрализации.
9. Система по п. 8, отличающаяся тем, что в качестве средства нейтрализации БПЛА-нарушителя использовано средство распыления аэрозоля.
10. Система по п. 8, отличающаяся тем, что в качестве средства нейтрализации БПЛА-нарушителя использовано средство распыления мелкодисперсного электропроводящего порошка.
11. Система по п. 8, отличающаяся тем, что в качестве средства нейтрализации БПЛА-нарушителя использовано средство метания сетки.
12. Система по п. 8, отличающаяся тем, что в качестве средства нейтрализации БПЛА-нарушителя использовано средство развертывания захватывающей сетки.
13. Система по п. 8, отличающаяся тем, что в качестве средства нейтрализации БПЛА-нарушителя использован осколочно-фугасный боеприпас.
14. Система по п. 1, отличающаяся тем, что она снабжена наземным пневматическим метательным устройством в виде трубы, которая установлена на станке, выполненном с возможностью углового наведения трубы по азимуту и углу места с помощью приводов, и снабжена резервуаром для воздуха высокого давления с управляемым клапаном, радиолокационным прицелом-дальномером, оптико-электронным модулем наведения и сопровождения и блоком управления на основе промышленной ЭВМ, соединенным с приводами, с радиолокационным прицелом-дальномером, с оптико-электронным модулем наведения и сопровождения, с управляемым клапаном и с модулем информационного обмена наземного центра контроля воздушного пространства.
15. Система по п. 14, отличающаяся тем, что наземное пневматическое метательное устройство выполнено с возможностью метания осколочно-фугасного боеприпаса или тела, содержащего аэрозоль, или мелкодисперсный электропроводящий порошок, или сетку.
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582084C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2009 |
|
RU2390795C1 |
| EP 3139125 A1, 08.03.2017 | |||
| US 20190360783 A1, 28.11.2019. | |||

