Настоящее изобретение относится к способу контроля тушки домашней птицы и/или набора субпродуктов, извлеченных из тушки домашней птицы, при этом вышеуказанная тушка домашней птицы и/или набор субпродуктов перемещаются по технологической линии, и контроль осуществляется контролером, который выбирает конкретную тушку домашней птицы и/или набор субпродуктов, которые должны быть отбракованы.
Изобретение также относится к технологической линии для обработки домашней птицы, содержащей контрольное оборудование, позволяющее контролеру проверять тушки домашней птицы и/или наборы субпродуктов, которые движутся по технологической линии.
Такой способ и устройство известны из европейской патентной заявки ЕР 1222858.
Этот известный уровень техники описывается в статье «Hands-off Inspection Proving Processors' Utopia» Дэвида Эмми в журнале PPM (Poultry Processing and Marketing), январь, 1978 г., страницы 28 - 33. С целью превратить утопию в реальность в ЕР 1 222 858 предлагается система контроля, в которой контроль может осуществляться с помощью группы камер, которые исключают необходимость использования для этой цели контролеров.
Однако, как правило, закон запрещает выполнять полностью автоматический контроль тушек домашней птицы и наборов субпродуктов без вмешательства человека. Таким образом, система контроля, в которой используются только камеры без участия контролеров, никогда не будет внедрена на практике.
Кроме того, в системе, предлагаемой в EP 1222858, нет полной замены контролера на камеру, которая осуществляет контроль с использованием только машины. Согласно этому документу (Фиг. 3 и страница 10, строки 38-46) контроль может выполняться контролером, который может принимать или отбраковывать тушку или набор субпродуктов посредством нажатия одной или нескольких кнопок, в то время как контроль также может выполняться с помощью камеры. Согласно странице 11, строка 54 - странице 12, строка 3, кнопки используются для передачи сигнала на выталкивание в систему управления, которая адаптирована для удаления субпродуктов из элемента для потрошения или для удаления тушки с подвески, что описывается далее со ссылкой на Фиг. 5 и 5А документа. Из последующего описания со ссылкой на Фиг. 5, 5А и 5В следует, что фактический контроль выполняется посредством касания тушек домашней птицы, выполняемого контролером. На странице 14, строки 40-56, документа EP 1222858 указывается, что по меньшей мере один контроль выполняется контролером и/или с помощью камеры. Если набор субпродуктов и/или тушка отбраковываются, контролер снимает (соответствующую) тушку, так чтобы она больше не была расположена на траектории транспортирования оставшихся тушек. Открытые места на траектории транспортирования тушек обнаруживаются датчиком, и система управления, которая соединена с этим датчиком, создает сигнал на выталкивание для соответствующего набора субпродуктов. Нажатие кнопки, как указано выше, также требуется для удаления тушки домашней птицы с подвески. Однако фактический выбор тушки домашней птицы, подлежащей отбраковке, осуществляется контролером вручную посредством перемещения конкретной тушки домашней птицы с ее траектории транспортирования, когда соответствующий набор субпродуктов или сама тушка домашней птицы соответствуют требованиям к отбраковке. Очевидно, что этот способ связан со значительным риском перекрестного загрязнения.
В документе WO 01/76378 описываются способ и установка для контроля забитой домашней птицы, в которой тушки домашней птицы подвешиваются за ножки и перемещаются по технологической линии в первом контейнере, при этом наборы субпродуктов извлекаются посредством потрошения и подвешиваются на втором конвейере, и в которой выбор определенной тушки для отбраковки или более тщательного контроля автоматически ведет к удалению этой тушки и соответствующего набора субпродуктов. Контроль тушек и наборов субпродуктов соответственно осуществляется вручную посредством визуального контроля предпочтительно без касания тушек и наборов субпродуктов, соответственно.
Одна из задач настоящего изобретения состоит в том, чтобы улучшить гигиенические условия процесса контроля.
Другая задача настоящего изобретения состоит в том, чтобы удовлетворить текущее требование в отношении высоких рабочих скоростей технологической линии для получения возможности обработки 6000 цыплят и более в час, при этом процесс контроля не должен быть ограничивающим фактором.
Решению и обеспечению этих и других задач и преимуществ, по меньшей мере, частично способствуют признаки одного или нескольких пунктов приложенной формулы изобретения.
В способе изобретения для контроля тушки домашней птицы и/или набора субпродуктов, которые извлечены из тушки домашней птицы, выбор конкретной тушки домашней птицы и/или набора субпродуктов, подлежащего отбраковке, выполняется контролером без касания вышеуказанной тушки домашней птицы и/или набора субпродуктов, при этом выбор конкретной тушки домашней птицы и/или набора субпродуктов, подлежащих отбраковке, выполняется вышеуказанным контролером, приводящим в действие бесконтактный датчик, который предназначен для выдачи сигналов, указывающих на положение и/или ориентацию, по меньшей мере, одной из его частей тела и/или указателя, удерживаемого контролером, и контролер перемещает конкретную часть тела и/или вышеуказанный указатель в положение, которое идентифицирует конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке.
Соответственно, технологическая линия изобретения оснащена контрольным оборудованием, позволяющим контролеру контролировать тушки домашней птицы и/или наборы субпродуктов, перемещающиеся по технологической линии, при этом технологическое оборудование позволяет контролеру выбирать конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке, без касания вышеуказанной тушки домашней птицы и/или набора субпродуктов, и контрольное оборудование имеет бесконтактный датчик, который предназначен для выдачи сигналов, указывающих на положение и/или ориентацию, по меньшей мере, одной из частей тела контролера и/или указателя, удерживаемого контролером.
В конкретном варианте выполнения датчик имеет взаимодействующий с ним источник ультразвуковых волн или лазерного излучения, при этом вышеуказанный датчик и источник ультразвуковых волн или лазерного излучения взаимодействуют для определения положения руки контролера. Контролер может перемещать руку в положение, которое идентифицирует конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке.
В другом варианте выполнения датчик или датчики предусмотрены в ручном устройстве, в котором датчик или датчики определяют положение и/или ориентацию ручного устройства, так чтобы контролер мог перемещать ручное устройство в положение и/или ориентацию, которые идентифицируют конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке.
В предпочтительном варианте выполнения датчик является системой камер, которая предназначена для отслеживания и определения положения и/или ориентации части тела контролера или указателя, удерживаемого контролером, так чтобы контролер мог перемещать соответствующую часть тела и/или вышеуказанный указатель в положение и/или ориентацию, которые идентифицируют конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке.
В соответствующей конструкции этого предпочтительного варианта выполнения, предназначенного для слежения за частью тела контролера, контролер может, к примеру, использовать очки, которые снабжены такой системой камер для слежения за глазным яблоком или глазными яблоками контролера с целью определения линии взгляда контролера, так чтобы контролер просто мог смотреть на конкретную тушку домашней птицы и/или набор субпродуктов для идентификации тушки домашней птицы и/или набора субпродуктов, подлежащих отбраковке.
В другом внедрении этого предпочтительного варианта выполнения, который, как предусматривается, обеспечивает наиболее приемлемую реализацию, датчик является системой 3D камеры, которая предназначена для отслеживания и определения положения и/или ориентации руки контролера или указателя в руке контролера, так чтобы контролер мог перемещать руку и/или вышеуказанный датчик в положение и/или ориентацию, которые идентифицируют конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке.
Во всех вариантах выполнения изобретения предпочтительно, чтобы помимо приведения в действие контролером датчика, который предназначен для выдачи сигналов, указывающих на положение части тела контролера или держателя, удерживаемого контролером, соответствующих тушке домашней птице и/или набору субпродуктов, которые должны быть отбракован, контролер также использовал средство подтверждения для подтверждения и завершения такого приведения в действие датчика с целью подтверждения и завершения выбора конкретной тушки домашней птицы и/или набора субпродуктов, подлежащих отбраковке. Соответственно, контрольное оборудование предпочтительно должно содержать средство подтверждения, позволяющее контролеру подтверждать и завершать приведение в действие датчика для выбора конкретной тушки домашней птицы и/или набора субпродуктов, подлежащих отбраковке.
Существуют несколько способов обеспечения такого средства подтверждения, однако предпочтительно, чтобы средства подтверждения были средствами подтверждения, управляемыми голосом, и/или средствами подтверждения, управляемыми жестами, и/или средствами подтверждения, управляемыми нажимными кнопками. Особо предпочтительными являются варианты со средствами подтверждения, управляемыми голосом, и/или средствами подтверждения, управляемыми жестами, поскольку это позволяет контролеру полностью осуществлять управление без помощи рук. Средства подтверждения, управляемые жестами, могут быть внедрены как часть системы 3D камеры, которая может быть предназначена для распознавания определенных жестов контролера, которые рассматриваются как знак подтверждения.
Другой предпочтительный вариант состоит в том, что используются средства подтверждения, которые обеспечивают соответствующую связь с выбором конкретного основания или причины отбраковки тушки домашней птицы и/или набора субпродуктов. Благодаря подтверждению конкретной тушки домашней птицы и/или набора субпродуктов также становится известной причина отбраковки тушки домашней птицы и/или набора субпродуктов, что является полезным для возможной последующей обработки отбракованной тушки домашней птицы и/или набора субпродуктов. В системе, управляемой нажимными кнопками, соответствующие нажимные кнопки могут иметь отношение к возможным основаниям или причинам отбраковки, и выбор конкретной нажимной кнопки указывает на фактическое основание или причину отбраковки. В системе, управляемой жестами, контролер может выбирать жест из группы возможных жестов, которые совместно образуют базу возможных причин отбраковки, который наиболее подходит к фактическому основанию или причине отбраковки. Система, управляемая голосом, может быть внедрена наиболее надежным образом в том смысле, что предварительно могут определяться конкретные голосовые команды, которые относятся к конкретным известным причинам отбраковки.
Во всех вариантах выполнения изобретения предпочтительно, чтобы контролер имел визуальную обратную связь, относящуюся к тушке домашней птицы и/или набору субпродуктов, которые он выбрал для отбраковки. Для этого существуют несколько возможных форм внедрения.
В первом внедрении рядом с технологической линией предусматривается подвижная световая штанга, и эта подвижная световая штанга имеет лампы различных цветов, соответственно указывающие на принятые и отбракованные тушки домашней птицы и/или набора субпродуктов, при этом соответствующие лампы подвижной световой штанги перемещаются синхронно с соответствующими тушками домашней птицы и/или наборами субпродуктов.
В другом более предпочтительном внедрении, требующем меньшей проводки по сравнению с подвижной световой штангой, предусматриваются один или несколько проекторов для испускания света различных цветов, соответственно указывающих на принятые и отбракованные тушки домашней птицы и/или наборы субпродуктов, при этом соответствующие лампы проекторов перемещаются синхронно с соответствующими тушками домашней птицы и/или наборами субпродуктов для поддержания испускания света на тушки домашней птицы и/или наборы субпродуктов, соответствующие принятым или отбракованным тушкам домашней птицы и/или наборам субпродуктов.
Различные цвета, испускаемые подвижной световой штангой, или проектором, или проекторами, также могут быть предусмотрены таким образом, чтобы каждому основанию или причине отбраковки соответствовал отдельный цвет, так чтобы контролер имел визуальную обратную связь не только с тушками домашней птицы и/или наборами субпродуктов, подлежащими отбраковке, но также и с причинами их отбраковки.
Ниже приводится описание изобретения со ссылкой на чертежи некоторых иллюстративных вариантов выполнения технологической линии, которая не ограничивается до приложенной формулы изобретения.
На чертежах:
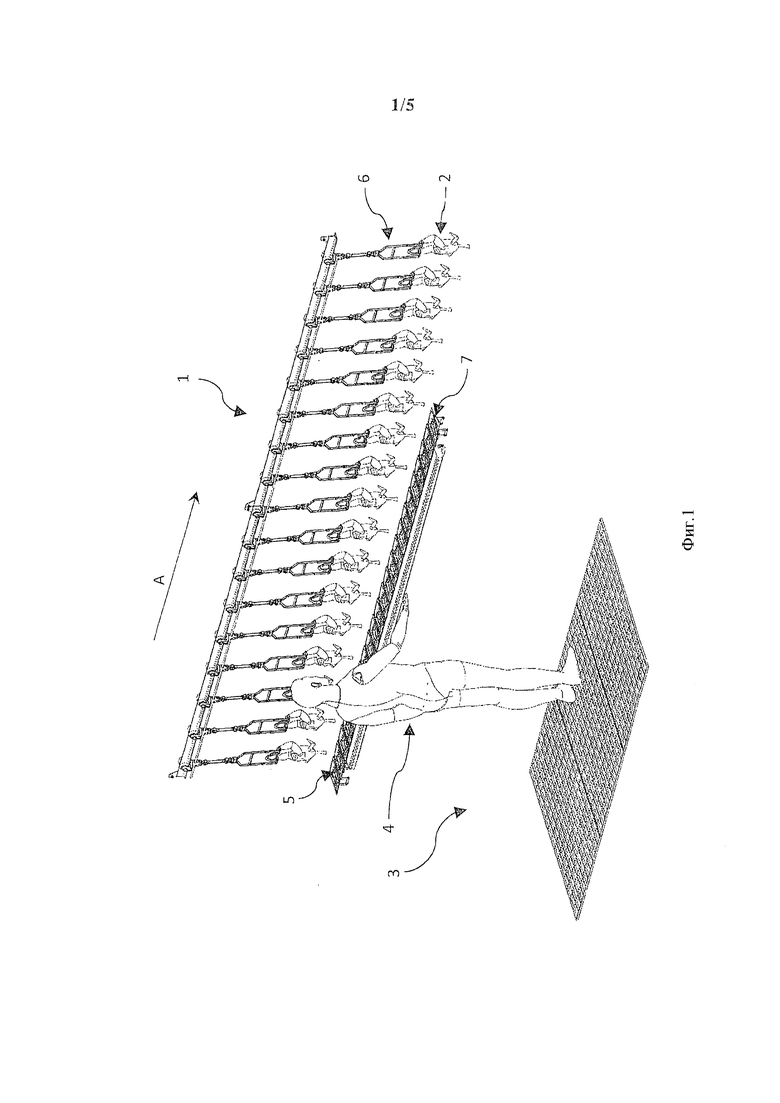
Фиг. 1 - часть технологической линии с контрольным оборудованием, которая является общей для предшествующего уровня техники и изобретения;
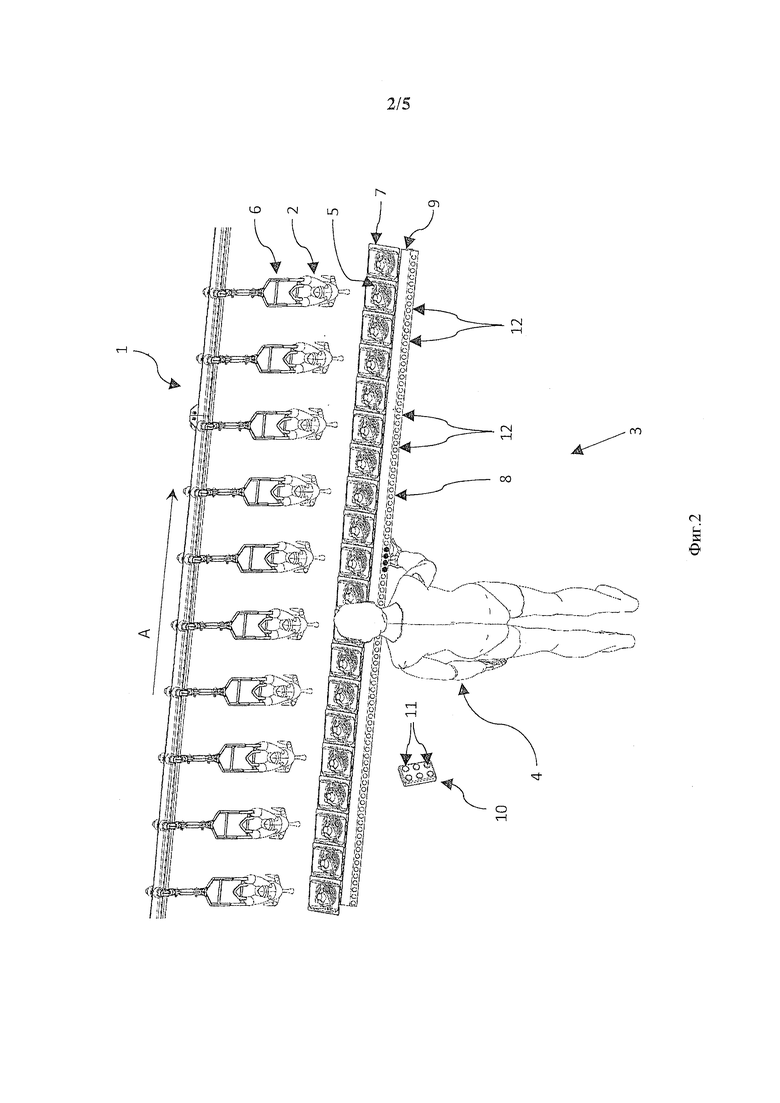
Фиг. 2 - вид на технологическую линию с контрольным оборудованием с признаками, соответствующими предшествующему уровню техники, и с признаками, соответствующими изобретению;
Фиг. 3 - первый вариант выполнения технологической линии с контрольным оборудованием по изобретению;
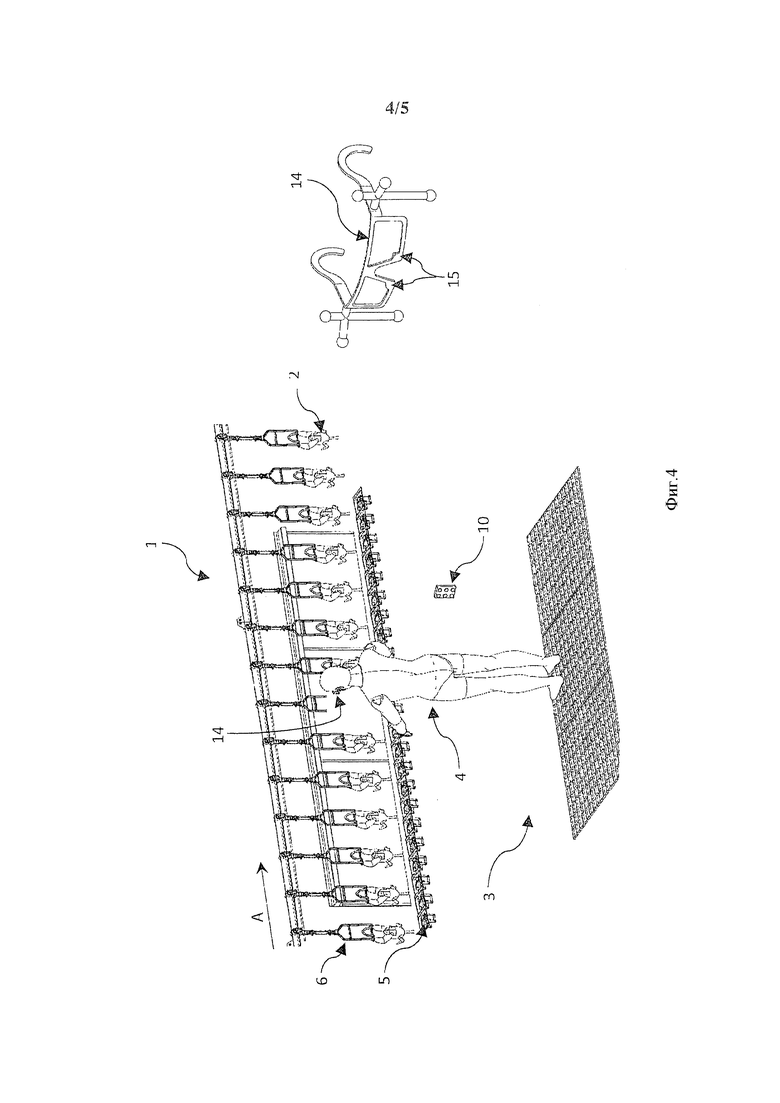
Фиг. 4 - второй вариант выполнения технологической линии с контрольным оборудованием по изобретению;
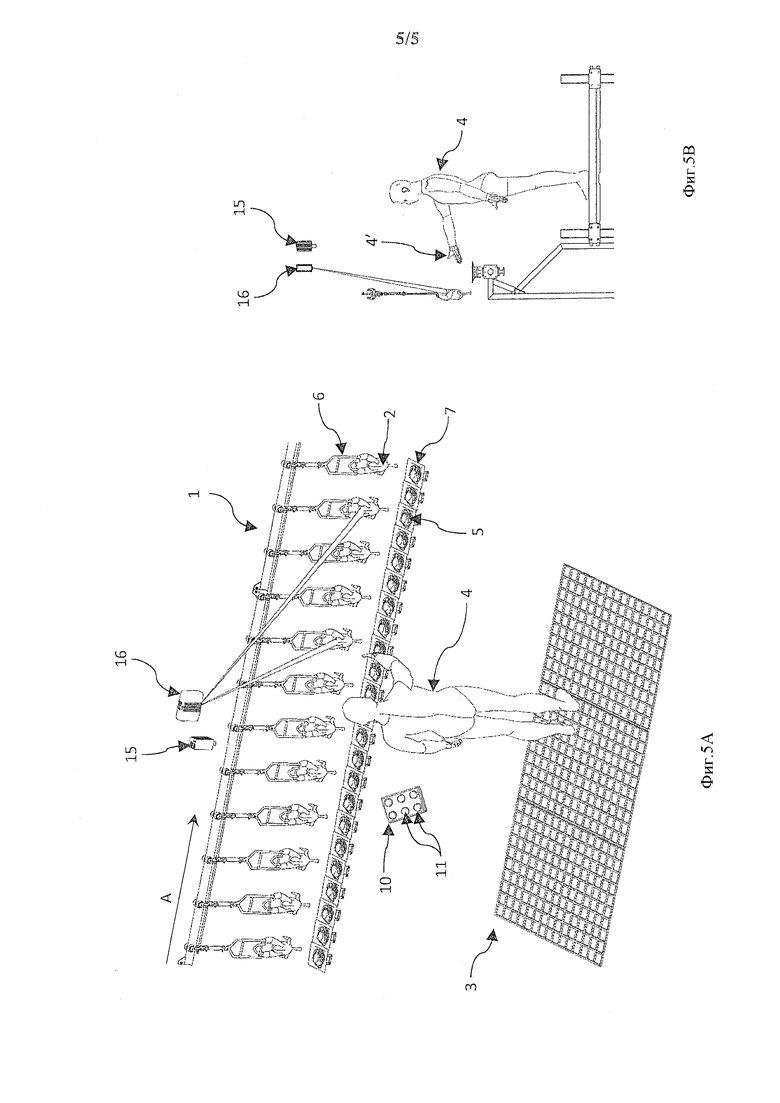
Фиг. 5А и 5В - вид в изометрии и вид сбоку третьего варианта технологической линии с контрольным оборудованием по изобретению.
Во всех случаях, когда на чертежах используются одинаковые ссылочные номера, эти номера относятся к одним и тем же частям.
На Фиг. 1 показан, в общем, известный случай, в котором технологическая линия переработки домашней птицы 2 содержит контрольное оборудование 3, позволяющее контролеру 4 проверять тушки 2 домашней птицы и/или наборы 5 субпродуктов. В случае, показанном на Фиг. 1, наборы субпродуктов полностью отделены от тушек 2 домашней птиц, которые подвешены за ножки на конвейерных подвесках 6 технологической линии 1. Отделенные наборы 5 субпродуктов помещены на лотки 7, которые движутся синхронно с тушками 2 домашней птицы в направлении A технологической линии 1. Это обеспечивает поддержание индивидуальной взаимосвязи между тушками 2 домашней птицы и наборами 5 субпродуктов, которые удалены из вышеуказанных тушек домашней птицы. Таким образом, когда контролер 4 обнаруживает, что набор 5 субпродуктов или тушка 2 птицы должны быть отбракованы, соответствующая тушка 2 домашней птицы или/и соответствующий набор 5 субпродуктов, который извлечен из такой тушки домашней птицы, могут быть удалены с технологической линии 1.
Согласно изобретению контрольное оборудование 3 позволяет контролеру 4 выбирать конкретную тушку 2 домашней птицы и/или набор 5 субпродуктов, подлежащие отбраковке, без касания тушки домашней птицы и набора субпродуктов или благодаря тому, что к тушке домашней птицы или набору субпродуктов прикасается помощник. В общем, во всех вариантах выполнения изобретения контрольное оборудование 3 снабжено бесконтактным датчиком, который предназначен для создания сигналов, указывающих на положение и/или ориентацию части тела контролера 4 для определения конкретной тушки 2 домашней птицы и/или набора субпродуктов, которые должны быть отбракованы. Вместо определения положения и/или ориентации части тела контролера 4 также можно измерять положение и/или ориентацию указателя, удерживаемого контролером для выбора тушки домашней птицы и/или набора субпродуктов, которые должны быть отбракованы. То и другое может быть реализовано несколькими способами, которые описываются ниже со ссылкой на Фиг. 2 и, в частности, со ссылкой на Фиг. 3-5, однако на этих чертежах не показан вариант, в котором контролер держит указатель. Изображение такого варианта является излишним, поскольку специалисту в данной области досконально известно, каким образом контролер может удерживать и использовать такой указатель.
На Фиг. 2, прежде всего, показан вариант выполнения с контрольным оборудованием, которое в соответствии с предшествующим уровнем техники снабжено датчиком или датчиками 8, расположенными в опоре 9 рядом с траекторией транспортирования тушки 2 домашней птицы и/или набора 5 субпродуктов в технологической линии 1, при этом датчик или датчики 8 представляют собой датчики, чувствительные к давлению, или датчики касания. Контролер может нажимать на датчики или, по меньшей мере, один из датчиков 8, или прикасаться к ним для выбора одной или нескольких тушек 2 домашней птицы и/или одного или нескольких наборов 5 субпродуктов, которые должны быть обракованы.
В отличие от предшествующего уровня техники на Фиг. 2 также показано, что контрольное оборудование содержит средство 10 подтверждения, позволяющее контролеру подтверждать и завершать приведение в действие датчика или датчиков 8, на которые выполняют нажатие или которых касаются. В этом показанном варианте выполнения средство 10 подтверждения представляет собой устройство дистанционного управления, оборудованное нажимными кнопками 11 для подтверждения приведения в действие выбранного датчика или датчиков 8. Соответствующие нажимные кнопки 11 могут иметь отношение к возможным основаниям или причинам отбраковки, так чтобы выбор конкретной нажимной кнопки указывал на основание или причину отбраковки контролером 4. Также имеется возможность внедрения другого средства 10 подтверждения с сенсорными кнопками или средства, описанного ниже со ссылкой на несколько вариантов выполнения изобретения. Вместо нажимных кнопок 11, к примеру, также может использоваться система, управляемая жестами, или система, управляемая голосом, для подтверждения и завершения выбора тушек 2 домашней птицы и/или наборов 5 субпродуктов, которые должны быть отбракованы.
Рядом с траекторией транспортирования тушек 2 домашней птицы и/или наборов 5 субпродуктов на технологической линии 1 опора 9 также может быть снабжена движущейся световой штангой 12, которая имеет световые индикаторы различных цветов, соответственно указывающие на принятые и отбракованные тушки 2 домашней птицы и/или наборы 5 субпродуктов, при этом соответствующие индикаторы подвижной световой штанги перемещаются синхронно с соответствующими принятыми и отбракованными тушками 2 домашней птицы и/или наборами 5 субпродуктов. Это обеспечивает эффективную визуальную обратную связь с контролером 4 в отношении тушек 2 домашней птицы и наборов 5 субпродуктов, которые приняты или отбракованы. Кроме того, эта система визуальной обратной связи может быть реализована иным образом, например с помощью проектора или проекторов, которые излучают свет конкретного цвета, характеризующий или принятие, или отбраковку, на соответствующие тушки 2 домашней птицы. Такая визуальная система обратной связи будет описана ниже со ссылкой на один из других вариантов выполнения изобретения.
На Фиг. 3 показан вариант выполнения, в котором контрольное оборудование 3 снабжено датчиком 8 и источником 13 ультразвуковых волн или лазерного излучения, который взаимодействует с вышеуказанным датчиком 8 для определения положения руки 4' контролера (или не показано: положения указателя, удерживаемого контролером) и определения конкретной тушки 2 домашней птицы и/или наборов 5 субпродуктов, которые должны быть отбракованы. Вместо источника лазерного излучения также, к примеру, может использоваться источник ультразвука. Когда контролер помещает руку 4' между источником 13 лазерного света или звука и датчиком 8, это приводит к отражению лазерного света или звука, которые могут быть измерены датчиком 8, при этом разница во времени между испусканием лазерного света или звука источником и его принятием датчиком 8 может быть измерена и использоваться в качестве средства определения места, куда контролер 4 поместил руку 4'. Таким образом, можно точно определить тушку 2 домашней птицы и/или набор субпродуктов, которые выбраны для отбраковки. Аналогично случаю с вариантом выполнения, описанным со ссылкой на Фиг. 2, в этом варианте выполнения контрольное оборудование 3 также содержит средство 10 подтверждения, позволяющее контролеру 4 подтверждать и завершать приведение в действие датчика 8. Средство 10 подтверждения, к примеру, представляет собой устройство дистанционного управления, оборудованное нажимными кнопками 11 для подтверждения приведения в действие датчика 8 посредством приема отраженного лазерного света или звука. Соответствующие нажимные кнопки 11 предпочтительно имеют отношение к возможным основаниям или причинам отбраковки, так чтобы выбор конкретной нажимной кнопки указывал на основание или причину отбраковки контролером 4. В этом варианте выполнения также имеется возможность внедрения другого средства 10 подтверждения, описанного ниже. Вместо нажимных кнопок 11 или сенсорных кнопок также может использоваться система, управляемая жестами, или система, управляемая голосом, для подтверждения и завершения выбора тушек 2 домашней птицы и/или наборов 5 субпродуктов, которые должны быть отбракованы, с помощью датчика 8.
Аналогично случаю с вариантом выполнения на Фиг. 2 в этом варианте выполнения на Фиг. 3 также предусмотрена опора 9 рядом с траекторией транспортирования тушек 2 домашней птицы и/или наборов 5 субпродуктов на технологической линии 1, и эта опора 9 может быть снабжена движущейся световой штангой 12, которая имеет световую индикацию различных цветов, соответственно указывающих на принятые и отбракованные тушки 2 домашней птицы и/или наборы 5 субпродуктов. Соответствующие индикаторы подвижной световой штанги перемещаются синхронно с соответствующими принятыми и отбракованными тушками 2 домашней птицы и/или наборами 5 субпродуктов для обеспечения эффективной визуальной обратной связи с контролером 4 в отношении тушек 2 домашней птицы и наборов 5 субпродуктов, которые приняты или отбракованы. Кроме того, в этом варианте выполнения эта система визуальной обратной связи может быть реализована иным образом, например с помощью излучателя или излучателей, которые испускают свет конкретного цвета, характеризующий или принятие, или отбраковку, на соответствующие тушки 2 домашней птицы.
Другой возможный вариант выполнения, который детально не показан на чертежах, снабжен контрольным оборудованием, которое имеет ручное устройство, предпочтительно, но необязательно содержащее датчик или датчики. В такое ручное устройство может быть внедрено ранее упомянутое средство 10 подтверждения, позволяющее контролеру 4 подтверждать и завершать выбор тушек домашней птицы и/или наборов субпродуктов, которые должны быть отбракованы. С помощью такого ручного устройства контролеру очень удобно делать соответствующий выбор, особенно в случае, когда ручное устройство снабжено датчиком или датчиками, которые определяют положение и/или ориентацию ручного устройства, которое может использоваться для выбора тушки домашней птицы и/или набора субпродуктов, которые должны быть отбракованы.
На Фиг. 4 и 5 (A, B) показаны другие варианты выполнения изобретения, в которых датчик контрольного оборудования представляет собой систему камер, которая предназначена для отслеживания и определения положения и/или ориентации части тела контролера и/или указателя, удерживаемого контролером, который используется для определения конкретной тушки домашней птицы и/или набора субпродуктов, которые должны быть отбракованы.
На Фиг. 4 показан вариант выполнения, в котором контрольное оборудование 3 включает в себя очки 14, используемые контролером 4, и эти очки 14 снабжены системой 15 камер для слежения за глазным яблоком или глазными яблоками контролера с целью определения конкретной тушки 2 домашней птицы и/или набора 5 субпродуктов, которые должны быть отбракованы. Контролер 4 просто должен смотреть на конкретную тушку 2 домашней птицы и/или набор 5 субпродуктов, и система 15 камер используется для определения линии взгляда контролера 4 для идентификации тушки 2 домашней птицы и/или набора 5 субпродуктов, которые должны быть отбракованы. В этом варианте выполнения также может использоваться средство 10 подтверждения, внедренное в виде устройства дистанционного управления, для подтверждения выбора конкретной тушки 2 домашней птицы и/или набора 5 субпродуктов, которые должны быть отбракованы. Кроме того, в этом варианте выполнения также имеется возможность использовать альтернативу внедрению средства подтверждения, например средство, управляемое жестами, или средство, управляемое голосом.
В варианте выполнения на Фиг. 4 для исключения препятствования видеосистеме обратной связи при выборе конкретной тушки домашней птицы и/или набора субпродуктов с помощью линии взгляда контролера может быть уместным использование проектора или проекторов (как будет описано ниже со ссылкой на вариант выполнения из Фиг. 5А/5В), которые испускают свет конкретного цвета, характеризующий или принятие, или отбраковку, на соответствующие тушки 2 домашней птицы. С другой стороны, не исключается, что в этом варианте выполнения может использоваться визуальная обратная связь благодаря применению опоры рядом с траекторией транспортирования тушек 2 домашней птицы и/или наборов 5 субпродуктов на технологической линии 1, при этом опора снабжена подвижной световой штангой, которая имеет световые индикаторы различных цветов, соответственно указывающие на принятые и отбракованные тушки 2 домашней птицы и/или наборы 5 субпродуктов.
На Фиг. 5А/В показан наиболее предпочтительный вариант выполнения технологической линии изобретения, в котором датчик представляет собой систему 15 3D-камер (см. Фиг. 5В), которая предназначена для слежения и определения положения и/или ориентации руки 4' контролера с целью определения конкретной тушки 2 домашней птицы и/или набора 5 субпродуктов, которые должны быть отбракованы. Опять же в системе может быть предусмотрено, чтобы вместо руки 4' контролера определялось положение и/или ориентация указателя (не показан), удерживаемого контролером.
Опять же в этом варианте выполнения контрольное оборудование 3 содержит средство 10 подтверждения, позволяющее контролеру 4 подтверждать и завершать выбор тушек 2 домашней птицы и/или наборов 5 субпродуктов, которые должны быть отбракованы. Согласно другим примерам, предусмотренным в этом описании, средства подтверждения выбираются из группы, содержащей средства подтверждения, управляемые голосом, и/или средства подтверждения, управляемые жестами, и/или средства подтверждения, управляемые нажимными кнопками 11, которые показаны на Фиг. 5А.
Предпочтительно, средства 10 подтверждения предназначены для обеспечения соответствующей связи с выбором конкретного основания или причины отбраковки тушки 2 домашней птицы и/или набора 5 субпродуктов, что легко может быть внедрено с помощью нескольких нажимных кнопок 1, каждая из которых представляет соответствующее основание или причину для отбраковки. Как упомянуто выше, эти различные основания или причины отбраковки также могут быть связаны с конкретными голосовыми командами в системе, управляемой голосом, или с конкретными жестами, когда 3D-камера 15 также используется для подтверждения выбора тушки 2 домашней птицы и/или набора 5 субпродуктов, которые должны быть отбракованы.
На Фиг. 5А и 5В также показано, что контрольное оборудование 3 снабжено средствами визуальной обратной связи, относящимися к тушке 2 домашней птицы и/или набору 5 субпродуктов, которые должны быть отбракованы. Эти средства визуальной обратной связи представляют собой проектор 16 (или несколько проекторов), испускающий свет разных цветов, соответственно указывающих на принятые и отбракованные тушки 2 домашней птицы и/или наборы 5 субпродуктов, при этом проектор 16 перемещает соответствующие световые лучи проектора 16 синхронно с соответствующими принятыми и отбракованными тушками 2 домашней птицы и/или наборами 5 субпродуктов для поддержания проецирования светового луча на тушки 2 домашней птицы и/или наборы 5 субпродуктов, которые соответствуют тушкам 2 домашней птицы и/или наборам 5 субпродуктов, принятым или отбракованным контролером 4. Следует отметить, что в этом варианте выполнения также имеется возможность использования подвижной световой штанги в качестве визуальной обратной связи контролера 4, и эта подвижная световая штанга помещается рядом с траекторией транспортирования тушек 2 домашней птицы и/или наборов 5 субпродуктов на технологической линии 1. Опять же в этом варианте выполнения подвижная световая штанга предпочтительно имеет световые индикаторы различных цветов, соответственно указывающие на принятые и отбракованные тушки домашней птицы и/или наборы субпродуктов, при этом соответствующие индикаторы подвижной световой штанги перемещаются синхронно с соответствующими принятыми и отбракованными тушками домашней птицы и/или наборами субпродуктов.
Несмотря на то что изобретение было описано со ссылками на несколько иллюстративных вариантов выполнения технологической линии для обработки домашней птицы по изобретению, изобретение не ограничивается до этих конкретных вариантов выполнения, которые могут варьироваться многими способами без отклонения от сути изобретения. Таким образом, описанные иллюстративные варианты выполнения не должны использоваться для толкования приложенной формулы изобретения строго в рамках этих вариантов. Наоборот, эти варианты выполнения предназначены только для объяснения содержания приложенной формулы изобретения без ограничения формулы изобретения до иллюстративных вариантов выполнения. Следовательно, объем защиты изобретения должен толковаться только согласно приложенной формуле изобретения, при этом возможная двусмысленность содержания формулы изобретения должна анализироваться с использованием этих иллюстративных вариантов выполнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ОБРАБОТКИ И СПОСОБ ПРОВЕРКИ ТУШЕК ПТИЦЫ И/ИЛИ ГРУППЫ ПОТРОХОВ | 2017 |
|
RU2672328C1 |
| ЛИНИЯ ДЛЯ ОБРАБОТКИ И/ИЛИ ИНСПЕКЦИИ ДОМАШНЕЙ ПТИЦЫ, ПОДВЕШЕННОЙ ЗА НОГИ | 2016 |
|
RU2625970C1 |
| Конвейерная линия и держатель для тушки домашней птицы, применяемый в этой линии | 2016 |
|
RU2639333C1 |
| СПОСОБ ОБРАБОТКИ ТУШКИ ПТИЦЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536450C1 |
| Система для размещения подаваемых передних частей тушек птицы в виде упорядоченной последовательности в линии переработки | 2019 |
|
RU2715855C1 |
| АВТОМАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА МЯСА, ОСТАВШЕГОСЯ НА ТУШЕ ЖИВОТНОГО | 2017 |
|
RU2728231C1 |
| УСТРОЙСТВО И СПОСОБ ОЧИСТКИ ТУШКИ ПТИЦЫ | 2015 |
|
RU2619232C2 |
| Устройство для отделения ножек от тушки или от части тушки забитой птицы,подвешенной за ножки к конвейеру | 1985 |
|
SU1422984A3 |
| ЛИНИЯ ОБРАБОТКИ ПТИЦЫ, СОДЕРЖАЩАЯ РЯД ПОДВЕСНЫХ РАМ ДЛЯ ПТИЦЫ И ОБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО ИЛИ ОБРАБАТЫВАЮЩИЕ УСТРОЙСТВА | 2014 |
|
RU2573318C1 |
| ПРИМЕНЕНИЕ РАСТВОРОВ ФОТОСЕНСИБИЛИЗАТОРОВ В БАКТЕРИЦИДНЫХ ЦЕЛЯХ ДЛЯ ОБРАБОТКИ ТУШЕК ПТИЦ | 2022 |
|
RU2806168C2 |

Группа изобретений относится к пищевой промышленности, а именно к технологической линии и способу контроля тушки домашней птицы и/или набора субпродуктов, извлеченного из тушки домашней птицы. Тушка домашней птицы и/или набор субпродуктов движутся по технологической линии, и контролер осуществляет контроль, выбирая конкретную тушку домашней птицы и/или набор субпродуктов, подлежащие отбраковке. Выбор конкретной тушки домашней птицы и/или набора субпродуктов, подлежащих отбраковке, осуществляется контролером без касания тушки домашней птицы и/или набора субпродуктов. Обеспечивается улучшение гигиенических условий процесса контроля высокоскоростных технологических линий. 2 н. и 20 з.п. ф-лы, 5 ил.
1. Способ контроля тушки (2) домашней птицы и/или набора (5) субпродуктов, извлеченных из тушки (2) домашней птицы, в котором тушку (2) домашней птицы и/или набор (5) субпродуктов перемещают по технологической линии (1) и контролер (4) осуществляет контроль, выбирая конкретную тушку (2) домашней птицы и/или набор (5) субпродуктов, подлежащие отбраковке, при этом выбор конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке, контролер (4) осуществляет без касания тушки (2) домашней птицы и/или набора (5) субпродуктов, отличающийся тем, что при выборе конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов контролер (4) приводит в действие бесконтактный датчик (8, 15), который предназначен для выдачи сигналов, указывающих на положение и/или ориентацию части (4') тела контролера (4) и/или указателя, удерживаемого контролером, причем контролер (4) перемещает указанные часть (4') тела и/или указатель в положение, которое идентифицирует конкретную тушку (2) домашней птицы и/или набор (5) субпродуктов, подлежащие отбраковке.
2. Способ по п. 1, отличающийся тем, что датчик (8) снабжен источником (13) ультразвуковых волн или лазерного излучения, при этом датчик (8) взаимодействует с источником (13) ультразвуковых волн или лазерного излучения для определения положения руки (4') контролера и/или указателя, удерживаемого контролером, причем контролер (4) перемещает руку (4') и/или указанный указатель в положение, которое идентифицирует конкретную тушку (2) домашней птицы и/или набор (5) субпродуктов, подлежащие отбраковке.
3. Способ по п. 1, отличающийся тем, что контролер (4) перемещает ручное устройство в положение и/или ориентацию, которые идентифицируют конкретную тушку (2) домашней птицы и/или набор (5) субпродуктов, подлежащие отбраковке, при этом ручное устройство (10) содержит датчик или датчики для определения положения и/или ориентации ручного устройства.
4. Способ по п. 1, отличающийся тем, что указанный датчик является системой (15) камер, предпочтительно системой (15) 3D камер, которая предназначена для отслеживания и определения положения и/или ориентации части тела (4') контролера и/или указателя, удерживаемого контролером, при этом контролер (4) перемещает часть тела и/или указанный указатель в положение и/или ориентацию, которые идентифицируют конкретную тушку (2) домашней птицы и/или набор субпродуктов (5), подлежащие отбраковке.
5. Способ по п. 1, отличающийся тем, что контролер (4) использует очки (14), которые снабжены системой (15) камер для слежения за глазным яблоком или глазными яблоками контролера, при этом контролер (4) смотрит на конкретные тушку (2) домашней птицы и/или набор (5) субпродуктов для идентификации этой тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
6. Способ по любому из пп. 1-5, отличающийся тем, что в дополнение к тому, что контролер (4) приводит в действие датчик (8, 15), который предназначен для выдачи сигналов, указывающих на положение части тела (4') контролера и/или держателя, удерживаемого контролером, контролер (4) также использует средство (10) подтверждения для подтверждения и завершения указанного приведения в действие датчика (8, 15) для определения конкретных тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
7. Способ по п. 6, отличающийся тем, что контролер (4) использует средства (10) подтверждения, которые управляются голосом, и/или жестами, и/или нажимными кнопками.
8. Способ по п. 6, отличающийся тем, что используют средства (10) подтверждения, которые обеспечивают заранее определенную связь с выбором конкретного основания или причины отбраковки тушки (2) домашней птицы и/или набора (5) субпродуктов.
9. Способ по любому из пп. 1-5, отличающийся тем, что контролер (4) имеет визуальную обратную связь в отношении тушки (2) домашней птицы и/или набора (5) субпродуктов, которые выбраны для отбраковки.
10. Способ по п. 9, отличающийся тем, что рядом с технологической линией (1) расположена подвижная световая штанга (12), которая выполнена со световыми индикаторами различных цветов, соответственно указывающими на принятые и отбракованные тушки (2) домашней птицы и/или наборы (5) субпродуктов, при этом соответствующие индикаторы подвижной световой штанги (12) перемещаются синхронно с соответствующими тушками (2) домашней птицы и/или наборами (5) субпродуктов, следуя за ними.
11. Способ по п. 9, отличающийся тем, что используют один или несколько проекторов (16) для испускания света различных цветов, соответственно указывающих на принятые и отбракованные тушки (2) домашней птицы и/или наборы (5) субпродуктов, при этом соответствующие лучи проекторов (16) перемещают синхронно с соответствующими тушками (2) домашней птицы и/или наборами (5) субпродуктов для поддержания проецирования света на тушки (2) домашней птицы и/или наборы (5) субпродуктов, соответствующие принятым или отбракованным тушкам (2) домашней птицы и/или наборам (5) субпродуктов.
12. Технологическая линия (1) для обработки домашней птицы (2), оснащенная контрольным оборудованием (3), позволяющим контролеру (4) контролировать тушки (2) домашней птицы и/или наборы (5) субпродуктов, перемещающиеся по технологической линии (1), при этом технологическое оборудование (3) позволяет контролеру (4) выбирать конкретную тушку (2) домашней птицы и/или набор (5) субпродуктов, подлежащие отбраковке, без касания указанной тушки (2) домашней птицы и/или набора (5) субпродуктов, отличающаяся тем, что контрольное оборудование (3) содержит бесконтактный датчик (8, 15), который предназначен для выдачи сигналов, указывающих на положение и/или ориентацию части (4') тела контролера (4) и/или указателя, удерживаемого контролером для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
13. Технологическая линия (1) по п. 12, отличающаяся тем, что контрольное оборудование (3) содержит источник (13) ультразвуковых волн или лазерного излучения, который взаимодействует с указанным датчиком (8) для определения положения руки (4') контролера и/или указателя, удерживаемого контролером, для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
14. Технологическая линия (1) по п. 12, отличающаяся тем, что контрольное оборудование (3) содержит ручное устройство (10) с датчиком или датчиками, которые определяют положение и/или ориентацию ручного устройства (10) для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
15. Технологическая линия (1) по п. 12, отличающаяся тем, что датчиком контрольного оборудования (3) является система (15) камер, предпочтительно система (15) 3D камер, которая предназначена для отслеживания и определения положения и/или ориентации части тела (4') контролера и/или указателя, удерживаемого контролером, для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
16. Технологическая линия (1) по п. 15, отличающаяся тем, что контрольное оборудование (3) включает в себя очки (14), которые использует контролер (4), и указанные очки (14) снабжены системой (15) камер для слежения за глазным яблоком или глазными яблоками контролера для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
17. Технологическая линия (1) по п. 12, отличающаяся тем, что контрольное оборудование (3) содержит средство (10) подтверждения, позволяющее контролеру (4) подтверждать и завершать приведение в действие датчика (8, 15) для определения конкретной тушки (2) домашней птицы и/или набора (5) субпродуктов, подлежащих отбраковке.
18. Технологическая линия (1) по п. 17, отличающаяся тем, что средства (10) подтверждения выбирают из группы, содержащей средства подтверждения, управляемые голосом, средства подтверждения, управляемые жестами, и средства подтверждения, управляемые нажимными кнопками (11).
19. Технологическая линия (1) по п. 17 или 18, отличающаяся тем, что средства (10) подтверждения обеспечивают заранее определенную связь с выбором конкретного основания или причины отбраковки тушки (2) домашней птицы и/или набора (5) субпродуктов.
20. Технологическая линия (1) по любому из пп. 12-18, отличающаяся тем, что она оснащена средствами (12, 16) визуальной обратной связи в отношении тушки (2) домашней птицы и/или набора (5) субпродуктов, выбранных для отбраковки.
21. Технологическая линия (1) по п. 17, отличающаяся тем, что содержит рядом с траекторией транспортирования тушки (2) домашней птицы и/или набора субпродуктов по технологической линии (1) подвижную световую штангу (12), которая выполнена со световыми индикаторами различных цветов, соответственно указывающих на принятые и отбракованные тушки (2) домашней птицы и/или наборы (5) субпродуктов, при этом соответствующие индикаторы подвижной световой штанги (12) перемещаются синхронно с соответствующими одобренными и отбракованными тушками (2) домашней птицы и/или наборами (5) субпродуктов, следуя за ними.
22. Технологическая линия (1) по п. 20, отличающаяся тем, что содержит один или несколько проекторов (16) для проецирования света различных цветов, соответственно указывающих на принятые и отбракованные тушки (2) домашней птицы и/или наборы (5) субпродуктов, при этом соответствующие проекторы (16) выполнены с возможностью перемещать свет проектора или проекторов (16) синхронно с соответствующими тушками (2) домашней птицы и/или наборами (5) субпродуктов для поддержания проецирования света на тушки (2) домашней птицы и/или наборы (5) субпродуктов, соответствующие принятым или отбракованным тушкам (2) домашней птицы и/или наборам (5) субпродуктов.
| Устройство для автоматической изоляции горных выработок | 1983 |
|
SU1222858A1 |
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 0 |
|
SU176378A1 |
| US 6227960 B1, 08.05.2001 | |||
| US 4616381 A, 14.10.1986 | |||
| Уловитель топливной смеси карбюра-TOPA пОдВЕСНОгО лОдОчНОгО MOTOPA | 1979 |
|
SU819381A1 |

