Изобретение относится к техническим средствам обнаружения и классификации сигналов, полученных от объектов, в радиоволновом средстве сверхвысокочастотного (СВЧ) диапазона и может использоваться для охраны участков местности с высокой интенсивностью появления животных в зоне обнаружения.
Известно устройство КСМ - ОЛД [1], состоящее из СВЧ модуля и схемы обработки сигнала, представляющее собой доплеровское однопозиционное средство обнаружения с регулируемыми размерами зоны обнаружения (ЗО). Извещатель излучает СВЧ сигнал, при движении в ЗО нарушителя СВЧ модулем принимается отраженный от объекта сигнал, модулированный по частоте в зависимости от скорости объекта. Принятый сигнал детектируется для выделения доплеровской составляющей и сравнивается с пороговым значением. При превышении сигналом порогового значения принимается решение о выдаче сигнала тревоги.
Известно устройство «Агат» [2], представляющее собой радиоволновое средство обнаружения. По принципу действия извещатель представляет собой доплеровский радиолокатор с селекцией движущихся целей по дальности на основе частотной модуляции излучаемого сигнала. Извещатель излучает СВЧ-сигнал, модулированный по частоте. При движении в ЗО нарушителя появляется отраженный сигнал, который принимается извещателем. По разности частот излучаемого и отраженного сигнала производится селекция по дальности. Селекция движения нарушителя производится на основании анализа частотного спектра доплеровской составляющей отраженного сигнала.
В обоих приборах решение о нарушении принимается пороговым устройством по энергетическому признаку при условии, что доплеровский сдвиг частоты сигнала лежит в определенном диапазоне, а длительность его воздействия не менее заданной величины.
Таким образом, принцип действия средств обнаружения - прототипов основан на регистрации приемником сверхвысокочастотного модуля изменений «интерференционной картины» электромагнитного поля объектом, движущимся в зоне обнаружения.
При принятии решения о наличии нарушителя используется алгоритм последовательной оценки трех информативных признаков (фиг. 1):
- частоты сигнала, зависящей от радиальной скорости перемещения объекта (осуществляется фильтром);
- длительности сигнала, зависящей от времени пересечения зоны обнаружения объектом (осуществляется интегратором);
- амплитуды сигнала, при использовании усилителя-корректора и частотной модуляции сигнала, зависящей от размера объекта (осуществляется пороговым устройством).
По причине того, что многие животные по скорости передвижения и размеру не отличаются от человека, данный способ принятия решения о наличии объекта не имеет принципиальной возможности различать человека и животного. Данный недостаток присущ всем радиоволновым доплеровским средствам обнаружения и приводит к высокому уровню ложных тревог при эксплуатации данных средств в местах с частым их появлением (например, собак).
Таким образом, недостатком данных устройств является низкая помехоустойчивость при появлении животного в зоне обнаружения, если его размеры и скорость передвижения сопоставимы с размерами и скоростью передвижения человека.
Целью изобретения является повышение помехоустойчивости радиоволнового доплеровского средства обнаружения при появлении в зоне обнаружения животного, сопоставимого по размерам с человеком.
Для достижения поставленной цели решается задача - создание устройства, обладающего способностью отличать человека от животного и позволяющего эффективно использовать его в условиях высокой вероятности появления животных в ЗО.
Повышение помехоустойчивости средства обнаружения при появлении в зоне обнаружения животного, параметры которого сопоставимы с параметрами человека, достигается путем внесения в структуру средства обнаружения схемы формирования вектора признаков, имеющих более выраженные отличия у человека и животных, и схемы принятия решения (классификатора).
При движении объекта в зоне обнаружения отраженный от него сигнал модулируется по всем параметрам за счет геометрических особенностей строения объекта и типичного для данного класса объектов способа перемещения. Решающее значение в повышении помехоустойчивости играют новые информативные признаки, принцип построения которых основан на добыче информации из сигнала о способе передвижения объекта, характерного человеку или животному.
Модель сигналообразования (МСО) радиоволнового доплеровского СО сантиметрового диапазона основана на уравнении радиолокации и описании эффекта Доплера с учетом того, что принятый сигнал детектируется фазовым детектором, а объект обнаружения является сложной целью и представляет собой совокупность элементарных отражателей (элементов):

где Ed(t) - напряжение на выходе фазового детектора (СВЧ модуля), В;
Kд - коэффициент пропорциональности, зависящий от характеристик приемника;
K(α(t)) - коэффициент пропорциональности, зависящий от угла α между осью диаграммы направленности антенны (ДНА) и направлением на j-элемент;
U0 - уровень зондирующего сигнала, В;
λ - длина волны зондирующего сигнала, м;
Dj(t) - расстояние от СВЧ модуля до j-го элемента, м;
Vj(t) - радиальная скорость j-го элемента, м/с;
Δtj(t) - время за которое фронт волны проходит от СВЧ модуля до j-го элемента и обратно, сек;
σj(t) - эффективная поверхность рассеяния (ЭПР) j-го элемента, [м2];
j - номер элемента объекта.
Из МСО видно, что на распознавание объектов могут повлиять только радиальная скорость j-го элемента, ЭПР j-го элемента, количество элементов n и их соотношение (ЭПР и скоростей).
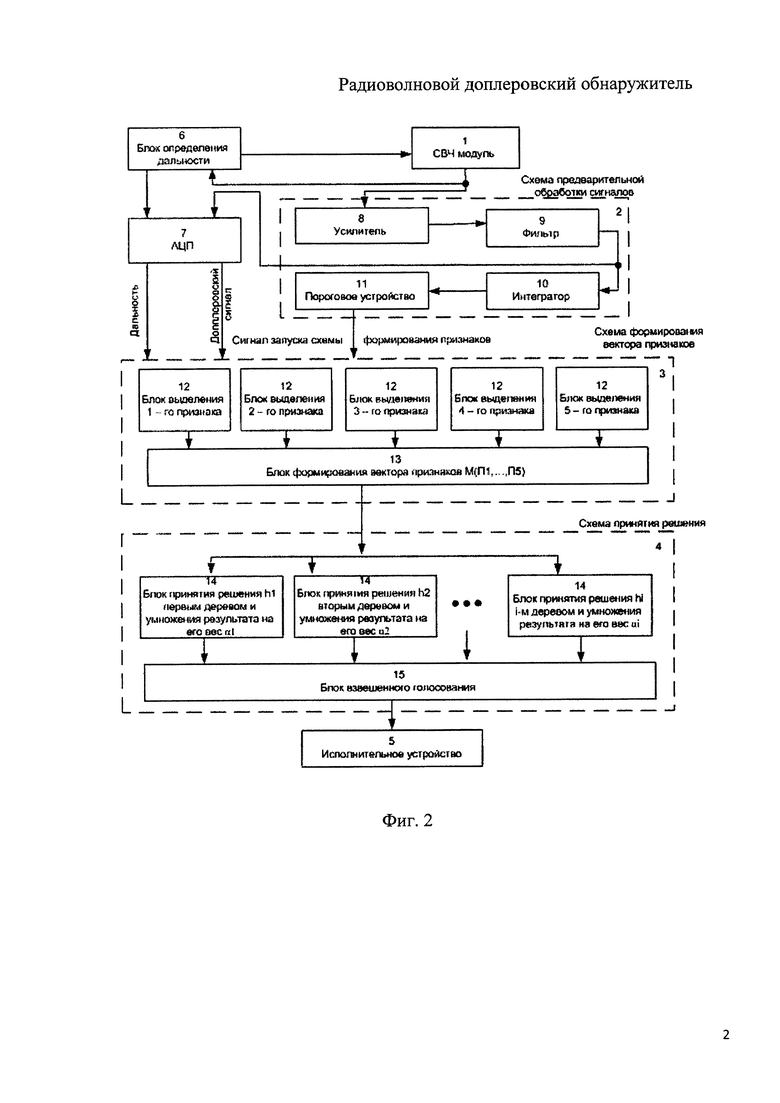
Предлагаемое устройство представляет собой радиоволновой доплеровский обнаружитель, состоящий из СВЧ модуля 1 (датчика, регистрирующего сигнал), схемы 2 предварительной обработки сигнала, схемы 3 формирования вектора признаков, схемы 4 принятия решения и исполнительного устройства 5 (фиг. 2).
В состав схемы предварительной обработки сигнала входят: блок 6 определения дальности, аналогово-цифровой преобразователь 7, усилитель 8, фильтр 9, интегратор 10, пороговое устройство 11.
В состав схемы формирования вектора признаков входят блоки 12 выделения признаков (числом по количеству признаков) и блок 13 формирования вектора признаков.
В состав схемы принятия решения входят блоки 14 принятия решений и умножения полученных результатов на значимость блока (числом по количеству деревьев решений) и блока 15 взвешенного голосования.
Сущность изобретения поясняется чертежами, где на:
- фиг. 1 - схема алгоритма принятия решения в средствах-прототипах;
- фиг. 2 - структурная схема радиоволнового доплеровского обнаружителя;
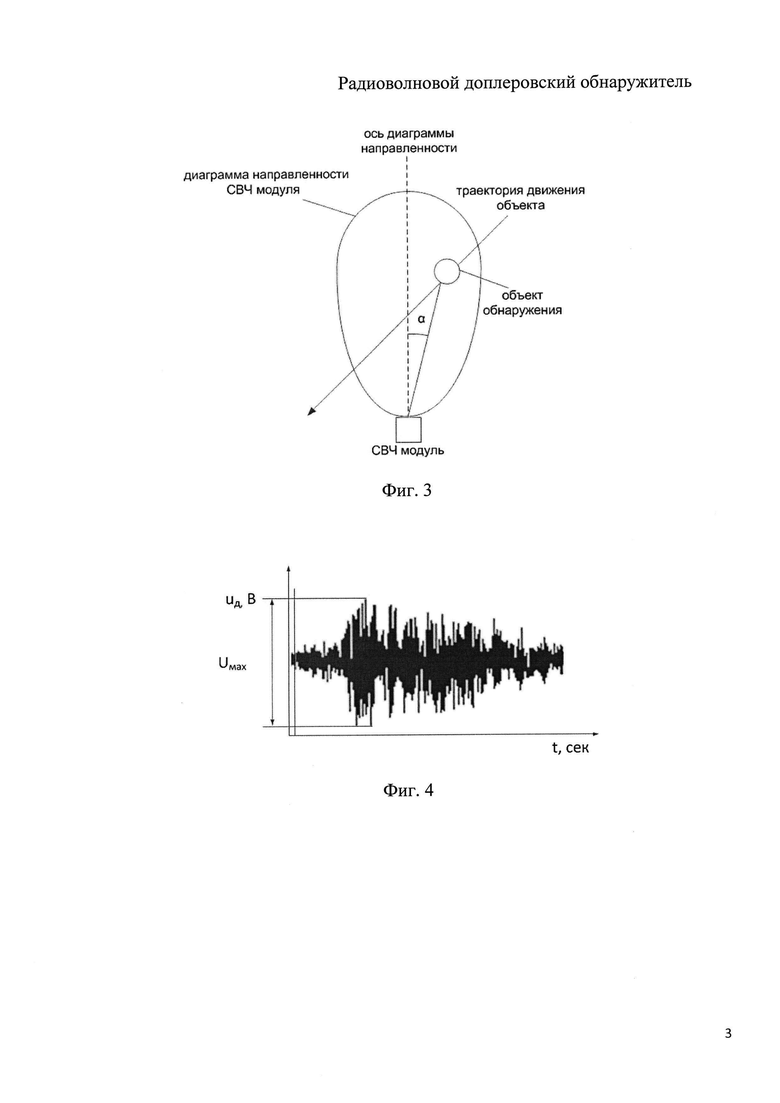
- фиг. 3 - схема прохождения объекта через зону чувствительности СВЧ модуля;
- фиг. 4 - вид сигнала, формируемого на выходе СВЧ модуля при прохождении объекта через зону обнаружения;
- фиг. 5 - график спектра доплеровского сигнала;
- фиг. 6 - рисунок представления ходьбы и бега человека;
- фиг. 7 - рисунок представления ротации таза человека при ходьбе;
- фиг. 8 - рисунок представления перемещения общего центра масс человека при ходьбе;
- фиг. 9 - рисунок вариантов передвижений лошади, где а) - шаг, б), в) - рысь, г) - галоп;
- фиг. 10 - график изменения частоты главного максимума  спектра доплеровского сигнала при проходе человека через ЗО под углом 10° к оси ДН антенн СВЧ модуля.
спектра доплеровского сигнала при проходе человека через ЗО под углом 10° к оси ДН антенн СВЧ модуля.
Предлагаемое устройство работает следующим образом.
СВЧ модуль 1 излучает в пространство сигнал, принимает отраженный от объекта сигнал. Из принятого сигнала выделяет доплеровскую составляющую, которая поступает на схему 2 предварительной обработки сигнала (вход усилителя 8) и блок 6 определения дальности.
Схема 2 предварительной обработки сигнала предназначена для предварительного усиления сигнала в усилителе 8, фильтрации сигнала в фильтре 9, интегрирования сигнала в интеграторе 10 и обнаружения превышения сигналом заданного уровня пороговым устройством 11, выработки управляющего сигнала запуска схемы 3 формирования вектора признаков. Выход усилителя 8 соединяется с входом фильтра 9, фильтр 9 соединяется с входом интегратора 10 и входом АЦП 7. Интегратор 10 соединяется со входом порогового устройства 11.
Сигнал, поступивший на схему 2 предварительной обработки сигналов, усиливается, фильтруется в заданном диапазоне частот и поступает на интегратор для отстройки от кратковременных выбросов, далее на пороговое устройство 11. Срабатывание порогового устройства 11 воспринимается, как обнаружение объекта. При этом сигнал с выхода порогового устройства 11 запускает схему 3 формирования вектора признаков и схему 4 принятия решения. С выхода фильтра 9 схемы 2 предварительной обработки сигнал поступает на второй канал АЦП 7.
Для определения дальности до объекта блок 6 определения дальности подает на СВЧ модуль 1 модулирующий сигнал и принимает от него низкочастотный доплеровский сигнал. По соотношению частот модулирующего и принятого сигналов блок 6 определения дальности выдает на АЦП 7 сигнал, уровень которого пропорционален дальности до обнаруженного объекта.
АЦП 7 имеет 2 канала и преобразует сигнал дальности и доплеровский сигнал в цифровую форму и передает их на схему 3 формирования вектора признаков.
Схема 3 формирования признаков представляет собой программу, вычисляющую информативные признаки на основе входных данных. Входными данными для работы схемы являются:
- отфильтрованный и усиленный доплеровский сигнал в цифровом виде;
- данные о расстоянии до обнаруженного объекта в цифровом виде;
- сигнал запуска схемы 3 (с порогового устройства).
Схема 3 формирования вектора признаков включает несколько блоков. Каждый блок выделяет (вычисляет) свой признак.
Признаки представляют собой оценки специфических параметров доплеровского сигнала, характеризующих свойства обнаруженного объекта. Признаки определены из следующих соображений.
А. Человек и животное отличаются размером (частично). Амплитуда сигнала характеризует отражательную способность объекта обнаружения (эффективную площадь рассеяния - ЭПР), следовательно, при приблизительно одинаковом составе животных и человека ЭПР характеризует его размеры. В качестве признака для оценки этого различия принята ЭПР объекта (признак П1). Для вычисления признака необходима дополнительная информация - расстояние до объекта:

ЭПР объекта вычисляется по формуле:

где D - расстояние до объекта, м;
Umax - максимум сигнала на выходе детектора, В;
K(α) - коэффициент, зависящий от характеристик СВЧ модуля и направления между осью диаграммы направленности (ДН) антенн и направлением на объект.
Поскольку при пересечении ЗО объект пересекает ось ДН (фиг. 3), то в этот момент на выходе модуля присутствует максимальный сигнал (фиг. 4). Следовательно, при использовании в формуле вычисления ЭПР Umax можно принимать K(α)=K(0), избавляясь тем самым от зависимости от угла между осью ДН антенн и направлением на объект.
Б. Человек и животное отличаются скоростью перемещения (частично). Согласно [3] положение максимума частотного спектра сигнала, характеризует усредненную за время наблюдения радиальную скорость перемещения наибольшей отражающей части объекта (корпуса). В качестве признака для оценки этого различия принят максимум частотного спектра доплеровского сигнала.
Признак вычисляется по формуле:

где: fглмах - главный максимум спектра доплеровского сигнала (фиг. 4).
В. Человек и животное отличаются разбросом скоростей подвижных элементов. Ходьба человека - это серия ритмичных и попеременных движений конечностей и туловища (фиг. 6), которые ведут к перемещению вперед центра тяжести. При ходьбе общий центр масс (ОЦМ) тела человека совершает ритмичные движения вверх и вниз при продвижении вперед. Плечевой пояс и таз человека ротируют в цикле шага в противоположном направлении (фиг. 7). Когда масса переносится с одной ноги на другую, таз и туловище перемещаются в сторону опорной ноги. Общий центр масс при продвижении вперед совершает не только ритмичные движения вверх и вниз (фиг. 8), но и раскачивается из стороны в сторону. В то время как таз вращается вокруг опорной ноги (для выброса вперед переносной ноги), вращается также плечевой пояс в противоположном направлении. Рукой на опорной стороне в это время делается взмах, она компенсирует массу вращающегося тела переносной ноги на противоположной стороне. При беге человека общая картина движения частей тела изменяется незначительно (фиг. 6). Таким образом, для равномерного поступательного движения человек совершает дополнительные уравновешивающие движения руками. Поскольку скорость движения конечностей при этом отличается от скорости движения корпуса, то и частоты отраженных от них сигналов отличны от частоты главного максимума, что приводит к расширению частотного спектра сигнала от человека.
На примере лошади рассмотрен типичный для четвероногих способ передвижения. Когда лошадь идет шагом, первой выносится вперед правая передняя нога, за ней - левая задняя. Следующей идет левая передняя и, наконец, - правая задняя (фиг. 9). На этом цикл завершается. При этом животные для ходьбы не совершают дополнительные уравновешивающие движения. При беге животных изменения гораздо более выражены, поэтому различие между человеком и животным при беге может уменьшаться.
В качестве признака для оценки этого различия принято отношение частоты максимума спектра доплеровского сигнала к его ширине (широкополосность сигнала):

Признак вычисляется по формуле:

где  - главный максимум амплитудно-частотного спектра доплеровского сигнала (фиг. 3);
- главный максимум амплитудно-частотного спектра доплеровского сигнала (фиг. 3);
 - максимальная частота спектра сигнала по уровню Smin;
- максимальная частота спектра сигнала по уровню Smin;
 - минимальная частота спектра сигнала по уровню Smax.
- минимальная частота спектра сигнала по уровню Smax.
Г. Человек и животное различаются соотношением размеров частей тела, движущихся со скоростью, большей скорости туловища (основного отражающего элемента) и частей тела, движущихся со скоростью, меньшей скорости туловища. Так как для равномерного поступательного движения человек совершает дополнительные уравновешивающие движения руками, то получается, что в определенных фазах шага у человека две конечности движутся быстрее туловища, а другие две конечности медленнее (при беге ситуация не меняется). Поскольку животному для ходьбы не надо совершать уравновешивающих движений, то при движении шагом у него только одна конечность движется быстрее туловища, а остальные конечности используются в качестве опоры. В качестве признака для оценки этого различия принята симметричность частотного спектра доплеровского сигнала:

Признак вычисляется по формуле:

где:  - площадь S1 (фиг. 5) под кривой амплитудно-частотного спектра доплеровского сигнала на участке от
- площадь S1 (фиг. 5) под кривой амплитудно-частотного спектра доплеровского сигнала на участке от  до
до  ;
;
 - площадь S2 (фиг. 5) под кривой амплитудно-частотного спектра доплеровского сигнала на участке от
- площадь S2 (фиг. 5) под кривой амплитудно-частотного спектра доплеровского сигнала на участке от  до
до  .
.
Д. Человек и животное различаются ритмичным ускорением корпуса. При каждом шаге человек наклоняется вперед, его общий центр масс (ОЦМ) выдвигается за площадь опоры и начинается «падение», при этом его туловище ускоряется (фиг. 8). Падению препятствует выдвинутая вперед нога. После того как она касается земли, на нее переносится вес тела. ОЦМ оказывается внутри площади опоры. Колено подгибается, амортизируя падение, и выпрямляется, возвращая тело на исходную высоту, туловище при этом замедляется. Таким образом, туловище человека при ходьбе подвержено ритмичным ускорениям и замедлениям.
Когда лошадь идет шагом, первой выносится вперед правая передняя нога, за ней - левая задняя. Следующей идет левая передняя и, наконец, - правая задняя. На этом цикл завершается, с тем, чтобы повториться с правой передней ноги и т.д. Проекция центра тяжести при этом всегда попадает внутрь треугольника, либо между двумя точками опоры, образуемыми находящимися на земле конечностями. Это позволяет животному в любой момент находиться в устойчивом состоянии, и его туловище при ходьбе меньше подвержено ритмичным ускорениям и замедлениям, поскольку необходимость уравновешивать неустойчивость положения тела животного меньше, чем у человека.
Увеличивая скорость, животное переходит на рысь: каждая нога отрывается от земли еще до того, как предшествующая ей в описанном выше цикле конечность коснется земли. Существует момент, когда животное опирается о землю только двумя конечностями. Это увеличивает скорость передвижения, но уменьшает устойчивость, ритмичное ускорение при этом возрастает. У лошадей, кошек, собак и многих других млекопитающих при таком быстром аллюре в воздухе одновременно находятся две диагонально расположенные конечности: левая передняя и правая задняя или наоборот. При таком перемещении туловище животного подвержено ритмичным ускорениям и замедлениям, сравнимым с человеком.
При галопе животное отрывает конечности от земли в ином порядке, чем при ходьбе шагом: правая передняя - левая передняя - правая задняя - левая задняя или, наоборот, левая передняя - правая передняя - левая задняя - правая задняя. При этом какое-то время животное целиком находится в воздухе, не касаясь земли ни одной из конечностей. При таком перемещении ритмичное ускорение и замедление туловища животного может превышать показатели человека.
Таким образом, различие в ритмичном ускорении в большей степени может проявляться при ходьбе объекта.
В качестве признака для оценки этого различия принята усредненная за время наблюдения скорость нарастания глобального максимума амплитудно-частотного спектра  , что характеризует радиальное ускорение основной отражающей части объекта между ближайшими локальными минимумами и максимумами:
, что характеризует радиальное ускорение основной отражающей части объекта между ближайшими локальными минимумами и максимумами:

Признак вычисляется по формуле:

где: αn - угол наклона прямой, соединяющей n-й максимум и n-й минимум графика поведения  (фиг. 10).
(фиг. 10).
Совокупность всех признаков, сформированных данной схемой, является признаковым вектором М и представляет собой матрицу-столбец, в которой каждая ячейка - численная оценка одного из признаков:

Вычисленный вектор признаков М подается на схему принятия решения. Схема принятия решения представляет собой программу, реализующую классификационную модель (решающее правило). Классификационная модель состоит из набора j деревьев решений, построенных по различным алгоритмам, например [4, 5] и блока взвешенного голосования (фиг.2). Вектор признаков М поступает одновременно на все деревья решений, каждое дерево самостоятельно принимает решение h о классе обнаруженного объекта (h может принимать значения -1 или +1) и имеет свой вес α. Далее результаты работы всех деревьев поступают на блок взвешенного голосования [5]. Голосование проходит по правилу (2):

где sign - знак результата;
k - номер дерева решений.
В результате взвешенного голосования набора деревьев принимается решение о классе обнаруженного объекта: «плюс» - нарушитель, «минус» - помеха. [4, 5]
Если принимается решение, что обнаруженный объект относится к классу нарушителей, то на исполнительное устройство поступает соответствующий сигнал, и оно выдает сигнал тревоги пользователю в нужном для него виде.
Предлагаемый обнаружитель обладает повышенной помехоустойчивостью и позволяет повысить качество работы технических средств охраны. Улучшение помехоустойчивости достигается за счет внесения изменений в схему обработки сигнала - применения в средстве обнаружения подсистемы распознавания, включающей схему формирования вектора признаков и схему принятия решения.
Источники информации
1. Средство обнаружения однопозиционное КСМ - ОЛД, руководство по эксплуатации БАЖК.425919.018 РЭ.
2. Извещатели охранные объемные радиоволновые ИО407-15 «АГАТ-СП5У» и ИО-407-15/1 «АГАТ-СП5/1» Руководство по эксплуатации ЮСДП.425144.003 РЭ. Закрытое акционерное общество «Фирма «ЮМИРС».
3. Маршалов Т.А. Радиолокационное распознавание экипированного нарушителя и животных / Евдокимов Н.О., Костенко Е.А. // Проблемы и перспективы разработки, совершенствования ТСОГ. Межвузовский сборник. Часть 4. - 2003. №12. - Калининград: КВИ ФПС России, с. 44-48.
4. Чубукова И.A. Data Mining: учебное пособие. - 2-е изд., испр. - М: Интернет - Университет Информационных технологий; БИНОМ. Лаборатория знаний, 2010. - 383 с.
5. Воронцов К.В. Лекции по логическим алгоритмам классификации. 21.12.2007 г. http:www.machinelearning.ru
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| Дистанционно устанавливаемый радиоволновый извещатель и способ его применения | 2019 |
|
RU2724146C1 |
| КОМПЛЕКС ОХРАНЫ БАЗОВЫХ СТАНЦИЙ СОТОВОЙ СВЯЗИ | 2015 |
|
RU2600921C1 |
| ДВУХЧАСТОТНОЕ ИМПУЛЬСНО-ДОПЛЕРОВСКОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2015 |
|
RU2594383C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| РАДИОВОЛНОВЫЙ ДОПЛЕРОВСКИЙ КАНАЛ С СИСТЕМОЙ САМОКОНТРОЛЯ РАБОТОСПОСОБНОСТИ, ПРЕИМУЩЕСТВЕННО ДЛЯ ОХРАННОГО ИЗВЕЩАТЕЛЯ | 1999 |
|
RU2167432C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ТЕКУЩЕГО МЕСТОПОЛОЖЕНИЯ НАРУШИТЕЛЯ ОХРАНЯЕМОЙ ЗОНЫ | 2005 |
|
RU2311686C2 |





Изобретение относится к техническим средствам обнаружения и классификации сигналов, полученных от объектов в радиоволновом (сверхвысокочастотного СВЧ-диапазона) средстве. Достигаемый технический результат - повышение помехоустойчивости однопозиционного доплеровского радиоволнового средства обнаружения (ОДРВСО) при появлении животных в зоне обнаружения. Способ повышения устойчивости к ложным срабатываниям при появлении животных заключается в следующем: ОДРВСО способно распознавать человека и животное по информации, содержащейся в отраженном от объекта СВЧ-сигнале. При отражении сигнал модулируется и несет в себе информацию об объекте. Из принятого сигнала выделяется доплеровская составляющая, которая усиливается, фильтруется и подается на обнаружитель. При обнаружении сигнала, превышающего пороговый уровень, запускается «схема» выделения признаков. Выделение признаков представляет собой получение из сигнала информации, заложенной в него при отражении от объекта. Информация поступает на «схему» принятия решения, которая согласно заложенной в нее классификационной модели (взвешенное голосование набора бинарных деревьев решений) принимает решение о выдаче сигнала тревоги. 10 ил.
Радиоволновой доплеровский обнаружитель, содержащий сверхвысокочастотный (СВЧ) модуль, представляющий собой датчик, регистрирующий сигнал, блок определения дальности, аналогово-цифровой преобразователь (АЦП), схему предварительной обработки сигналов, схему формирования вектора признаков, схему принятия решения и исполнительное устройство, при этом СВЧ модуль соединен с блоком определения дальности и входом схемы предварительной обработки сигналов, выход схемы предварительной обработки сигналов соединен с входом схемы формирования вектора признаков, выход схемы формирования вектора признаков соединен со входом схемы принятия решения, выход схемы принятия решения соединен со входом исполнительного устройства, кроме того, выходы блока определения дальности соединены с входом СВЧ модуля и входом АЦП, выходы АЦП соединены со входом схемы формирования вектора признаков, отличающийся тем, что схема формирования вектора признаков формирует матрицу-столбец, в которой каждая строка - численная оценка одного из признаков обнаруженного объекта - П1, П2, П3, П4, П5, при этом П1 - эффективная площадь рассеяния (ЭПР) объекта обнаружения, П2 - максимум амплитудно-частотного спектра доплеровского сигнала, П3 - отношение частоты максимума амплитудно-частотного спектра доплеровского сигнала к его ширине, П4 - симметричность амплитудно-частотного спектра доплеровского сигнала, П5 - усредненная за время наблюдения скорость нарастания максимума амплитудно-частотного спектра, сформированный вектор признаков М подается на схему принятия решения, в которой решение о наличии объекта принимается на основании сформированной классификационной модели, причем, если обнаруженный объект относится к классу нарушителей, то исполнительное устройство выдает сигнал тревоги пользователю.
| МАРШАЛОВ Т.А | |||
| Радиолокационное распознавание экипированного нарушителя и животных.Межвузовский сборник | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ДИСТАНЦИОННОЙ ОЦЕНКИ ПАРАМЕТРОВ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ, ДЫХАНИЯ И ПУЛЬСА ЧЕЛОВЕКА ИЛИ ЖИВОТНОГО | 2010 |
|
RU2463949C2 |
| Установка для изготовления железобетонных многопустотных плит | 1953 |
|
SU104751A1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2010 |
|
RU2430417C1 |
| US 5361070 B1, 16.05.2000 | |||
| СПЛАВ ДЛЯ РАСКИСЛЕНИЯ И ЛЕГИРОВАНИЯ СТАЛИ | 0 |
|
SU395480A1 |
| JP 2005004256 A, 06.01.2005. | |||

