Область техники, к которой относится изобретение
Изобретение относится к аэродромному оборудованию, предназначенному для приема самолета на посадке на специальную платформу, торможения его с преобразованием кинетической энергии в электрическую в линейном генераторе, временным хранением в аккумуляторных батареях и использованием ее (рекуперацией) для разгона взлетающих самолетов.
Уровень техники
Известно изобретение №2610317, в котором разгон взлетающего самолета производится со специальной платформы, устанавливаемой на взлетно-посадочной полосе (ВПП), оснащенной заборниками улавливания выхлопных струй и перенаправления их через полые каналы на нижнюю площадь крыла с целью создания воздушной подушки, способствующей повышению подъемной силы самолета при разбеге. Аппарат прикреплен к челноку, опирающемуся на рельсы. Самолет опирается на ВПП. Разгон челнока осуществляется электромагнитной тягой линейного электродвигателя. Данное изобретение решает техническую проблему уменьшения разбега самолета, экономии топлива и повышения дальности полета. Уменьшение разбега пассажирского самолета полезно для наиболее крупных лайнеров типа Боинг 747, Аэробус 380, у которых длина разбега превышает 3 км. Для средних самолетов Боинг 737 длина разбега – 1,2 км при взлетной скорости 280 км/ч соответствует среднему ускорению 2,5 м/c2. Дальнейшее уменьшение разбега приведет к увеличению ускорения, действующего на пассажиров, и при значении более 4 м/с2 станет некомфортным. Напротив, для крупных самолетов, имеющих примерно равную скорость отрыва, сокращение разбега возможно при ускорении в пределах до 4 м/с2. Данное изобретение не решает проблему снижения пробега самолета при посадке, и экономия топлива происходит при увеличении аэродромных энергозатрат.
Существуют заявки на изобретения, в которых предлагается магнитная левитация платформ, но это также ведет к увеличению общих энергозатрат на обеспечение взлета.
Следующий ресурс: http://www.airbus.com/innovation/future-by-airbus/smarter-skies/aircraft-in-free-flight-and-formation-along-express-skyways/ информирует о планах Компании AIRBUS создать к 2050 году аэродромные платформы для разгона пассажирских лайнеров без использования шасси. При этом решаются технические проблемы уменьшения площади аэропортов, снижения экологической нагрузки авиации на окружающую среду за счет снижения расхода ископаемого топлива и возможности использования возобновляемых источников для питания аэродромных установок, что должно привести к сокращению эмиссии СО2. Происходит снижение общего уровня шума аэропортов за счет более быстрого взлета при снижении времени работы двигателей на взлетном режиме, что актуально для всех крупных аэропортов. Технической проблемой такого оборудования является создание платформ для посадки самолетов без шасси. Реализация такой концепции потребует значительных затрат на переоборудование аэропортов для приема самолетов без шасси и на создание самих самолетов.
Известно изобретение №2093429, предлагающее способ приземления самолета на платформу и устройство для его осуществления. При снижении самолета разгоняется самоходная платформа, в определенный момент с борта самолета выстреливается якорь, который захватывается приспособлением платформы, самолет выравнивается по тангажу и крену и притягивается к платформе, движущейся с равной скоростью. После фиксации самолета на платформе происходит торможение платформы с самолетом. Платформа опирается в центральной части через пневмокатки на бетонную поверхность ВПП, а боковыми оконечностями – через упругие опоры и металлические колеса на рельсы, расположенные ниже поверхности полосы. Недостатком такого способа посадки является повышенная опасность вмешательства в процесс посадки самолета в момент притягивания к платформе, что может быть оправдано только в случае аварийной посадки с поврежденными органами управления или шасси. Кроме того, кинетическая энергия самолета не используется, наоборот необходимы затраты энергии на торможение при использовании силовых установок платформы в режиме реверса, также происходит износ материалов тормозных устройств.
Известно изобретение №2352503, согласно которому предлагается способ посадки летательного аппарата на ВПП, оснащенную ленточным конвейером в конечной своей части. После захода самолета на конвейер режим его движения автоматически согласуется с заданным режимом торможения самолета, при этом сокращается пробег. Недостаток такого способа в том, что сохраняется возможность бокового удара шасси при посадке, особенно при боковом ветре. При переходе с поверхности ВПП на поверхность конвейера неизбежен удар в месте сопряжения конвейера с ВПП.
Известно изобретение №2046070, в котором разгон авиакосмического челнока происходит при помощи стартовой тележки с электромагнитным приводом, представляющим собой линейный электродвигатель, включающего статор, который уложен вдоль полосы, и сверхпроводящие магниты, которые размещены на тележке. Торможение тележки после отрыва челнока происходит в два этапа. На первом после отключения питания статора включается твердотопливный реактивный двигатель, на втором в статоре возбуждается магнитное поле, бегущее в обратном движению тележки направлении. Данный способ характеризуется значительными энергозатратами как для взлета самолета, так и для торможения тележки, а устройство не предназначено для приема летательного аппарата на посадке. Сверхпроводящие магниты дорогостоящие и требуют затрат энергии на поддержание низких температур, а криогенное оборудование утяжеляет тележку, в результате затраты энергии увеличиваются еще больше.
Известны также системы обеспечения укороченного взлета и посадки, применяемые, в основном, на авианосцах. Взлет происходит при помощи катапульты, зацепляемой рабочим органом за самолет. Привод катапульты обеспечивается, например, поршнем под действием пара под давлением. Или техническое новшество (http://vvprohvatilov.livejournal.com/182994.html) - электромагнитная катапульта (EMALS) фирмы General Atomics на основе линейных электродвигателей. Замена паровых катапульт электромагнитными призвана обеспечить большую управляемость запусков самолётов, меньшие нагрузки на них, возможность взлёта при более широком диапазоне скоростей и направлений ветра, а также запуск беспилотников. EMALS — это линейный индукционный двигатель. Сегменты двигателя поочередно отключаются и подключаются, разгоняя самолет. В пусковом устройстве есть специальная тележка, к которой самолет цепляется передней стойкой шасси и движется между двумя направляющими с электромагнитами, как по рельсам. Электромагнитные секции после прохождения мимо них тележки отключаются, а те, к которым она приближается, включаются. Это существенно экономит электроэнергию.
Работы по созданию электромагнитной катапульты для авианосцев начались в СССР раньше, чем в США. В 80-е годы в Институте высоких температур Академии наук совместно с ЦАГИ им. профессора Н.Е. Жуковского и ОКБ А.И. Микояна в рамках НИР «Шампунь» велась разработка системы электромагнитного взлета и посадки самолетов для авианосцев и мобильных аэродромов наземного базирования
Посадка происходит на посадочную полосу. Самолет зацепляет специальным крюком тормозной леер, связанный с тормозным устройством. Такие системы не предусматривают возможность рекуперации энергии садящихся самолетов, характеризуются значительными перегрузками при разгоне и не приемлемы для пассажирского трафика по этой причине, а также по причине повышенной опасности при посадке, требующей высокого мастерства пилотов.
Посадка самолета – один из наиболее опасных этапов полета. Посадка при боковом ветре выполняется вручную и является сложным маневром для пилотов. Так для сохранения направления движения самолета вдоль оси ВПП пилот рулями направления поворачивает нос самолета к ветру при снижении и выравнивании, при этом самолет движется с боковым скольжением относительно воздуха, в момент же касания колес пилот поворачивает самолет вдоль оси ВПП. При этом весьма возможен боковой удар шасси о ВПП, что может привести к их повреждению.
Если будет происходить посадка самолета на движущуюся со скоростью самолета платформу с шириной равной ширине ВПП на шасси, то пилот может посадить самолет под углом к оси ВПП. Избежать бокового удара шасси гораздо легче. Кроме того, колеса шасси не вращаются и касаются платформы без скольжения, при посадке же самолетов в обычном режиме в момент касания колес шасси о поверхность полосы происходит их значительный износ при проскальзывании и раскручивании. Таким образом, увеличивается безопасность полетов, снижается психоэмоциональная нагрузка на пилота при посадке и уменьшается износ колес шасси. Появляется возможность использования энергии движения платформы с самолетом с высокой эффективностью, свойственной преобразованию энергии механического движения в электрическую. При оснащении поверхности платформы подушками безопасности можно посадить самолет, например, с неисправными шасси в аварийном режиме на фюзеляж без существенного повреждения корпуса и достаточно безопасно.
Системы рекуперации энергии инерции транспортных средств применяются на железнодорожном транспорте, в электроавтомобилях. В первом случае машина переменного или постоянного тока переводится в режим генератора, а энергия передается в тяговую сеть и потребляется другими составами. В случае электроавтомобилей энергия накапливается в аккумуляторных батареях. На городском пассажирском транспорте применяются механические рекуператоры энергии с промежуточным кратковременным накоплением энергии в инерционных маховиках или в ресиверах сжатого газа, который нагнетается компрессоом или двигателем внутреннего сгорания, переводимым в режим компрессора при торможении транспортного средства. Данная энергия используется в дальнейшем или при последующем разгоне, или при движении автобуса. Существует концепция городского пассажирского колесного транспорта на суперконденсаторах (ионисторах). На остановках во время посадки-высадки пассажиров троллейбус подключается к зарядной станции и в течение короткого времени заряжается энергией, достаточной для проезда до следующей остановки.
Для определения мощности электрических машин и размеров полос необходимо рассмотреть возможный выход энергии и мощности при торможении самолета, находящегося на модуле, и затрачиваемую энергию при разгоне взлетающего самолета. Наиболее оптимальным будет вариант, если выделяемая энергия модуля торможения (КПД~90-92%) будет сразу поглощаться модулем разгона (КПД~92-94%), то есть с минимальным накоплением в аккумуляторах (КПД<97%). Это позволит уменьшить количество циклов заряда-разряда аккумуляторов, увеличить их долговечность, уменьшить потери энергии в них на электрохимическое преобразование. При этом масса взлетающего самолета подбирается под массу садящегося.
Согласно характеристикам, разбег Боинг 747 составляет более 3 км. С применением модуля и ограничением ускорения длина разбега снизится в два раза и будет соответствовать разбегу менее крупного самолета Боинг 737. Из результатов расчетов видно, что непосредственное поглощение вырабатываемой мощности возможно. Оборудование аэродромной установки должно быть рассчитано, для самолета взлетной массой 400 т - на мощность 90 МВт, а для самолета взлетной массой 50 т - на 10 МВт, при условии ограничения ускорения величиной - 4м/с2.
При взлете на разгон массы расходуется около 1260 МДж энергии. КПД авиационного двигателя тем ниже, чем ниже скорость самолета и при неподвижном самолете равен нулю, а при скорости отрыва равен ~30%. Таким образом, если использовать кинетическую энергию самолета на посадке при взлете такого же самолета, можно экономить 200 кг керосина – ископаемого топлива. Влияние массы аэродромного модуля не учитывается, так как энергия его движения также используется.
Массы взлетающих и садящихся даже одинаковых пассажирских самолетов отличаются. Это связано с разным количеством пассажиров и разными остатками топлива на борту, не говоря уже о том, что на практике аэропорт обслуживает одновременно различные марки самолетов. Поэтому необходимо, чтобы аккумуляторы запасали количество энергии, вырабатываемое при посадке нескольких самолетов подряд, подразумевая, что, по возможности, все же, график взлетающих и садящихся самолетов будет учитывать сопоставимость их масс.
Известны следующие технически возможные способы запасания энергии (механической энергии).
Непосредственное накопление механической энергии:
В накопителях потенциальной энергии (в перемещенных в вертикальном направлении относительно земли твердых и жидких телах или в сжатых газах или упругих элементах). К недостаткам таких устройств можно отнести значительные затраты на создание механизмов такой мощности, передаваемых усилий и скоростей или гидротехнических сооружений, значительная материалоемкость, габариты и соответственно занимаемая площадь. К преимуществам можно отнести возможность длительного хранения энергии, а в случае гидроаккумуляторов проще согласовать скорости и мощность, отсутствуют потери на преобразование видов энергии.
В маховиках. И в случае установки маховика стационарно и на подвижную площадку, потребуется создание громоздких механических передач с возможностью преобразования скорости и усилий в широком диапазоне, но при этом также отсутствуют потери на преобразование видов энергии.
Тепловые аккумуляторы позволяют запасать энергию в виде разности температур рабочего тела - жидкого воздуха, запасаемого в криогенных резервуарах на длительное время с низкими потерями энергии при хранении, и окружающей среды. Но такие системы обладают инерционностью, то есть выход на рабочий режим будет занимать время не соизмеримо большее времени, за которое должен быть остановлен или запущен самолет. Механическая энергия в холодильной установке преобразуется в тепловую энергию и затем обратно в тепловом двигателе - в механическую. Кроме того, криогенное оборудование, по сравнению с другими аккумуляторами, весьма насыщено различным теплообменным оборудованием, нагнетателями с системами контроля и управления, в результате помимо значительной стоимости оно будет иметь низкую надежность.
Сверхпроводниковые магнитные накопители (электромагнитные «маховики», аккумуляторы реактивной энергии) позволяют поглощать и хранить значительную энергию в течение короткого времени. Требуют использования дорогостоящего криогенного оборудования и материалов, составляющих высокотемпературные сверхпроводники.
Суперконденсаторы (ионисторы) и электрохимические аккумуляторы запасают электрическую энергию, поэтому сначала механическая энергия преобразуется в электрическую. Суперконденсаторы в отличие от аккумуляторов способны практически мгновенно поглощать и отдавать электрическую энергию, обеспечивают неограниченное количество циклов заряда и разряда, но обладают меньшей емкостью, а мощность зависит от напряжения и пока в разы дороже. Химические аккумуляторы более распространены и разнообразны: свинцово-кислотные, никель-кадмиевые, никель-металлогидридные, литий-ионные, натрий-серные, металло-воздушные, цинк-бромные, ванадиевые редокс-аккумуляторы, полисульфид-бромидные. На данный момент по характеристикам наиболее подходящими для применения в аэродромной установке являются литий-ионные аккумуляторы, КПД заряда-разряда которых может достигать 97%. При этом существуют разновидности, позволяющие поглощать-выдавать большую мощность или имеющие большую емкость. Возможны следующие соотношения удельной емкости/мощности:
60 Вт*ч/кг - 5000 Вт/кг;
100 Вт*ч/кг - 1000 Вт/кг;
160 Вт*ч/кг - 100 Вт/кг
Так для посадки одного Боинг 747 потребуется:
4.1 по емкости - 5830 кг аккумуляторов, по мощности – 18000 кг;
4.2 по емкости – 3500 кг, по мощности – 90000 кг;
4.3 по емкости – 2190 кг, по мощности – 900000кг.
Таким образом, для аэродромной установки целесообразнее использовать высокомощностные литий-ионные аккумуляторы, при этом для примера 4.1 аккумуляторы будут занимать всего 14 м3. (2*2*3,5 м), а стоимость с устройствами зарядки и управления составит около – 5-11 млн.$. И можно будет принять без разряда до трех таких самолетов подряд.
С другой стороны, современным аэропортам свойственно обслуживание интенсивного потока садящихся – взлетающих машин. Например, аэропорт Шереметьево обеспечивает около 60 влетов-посадок в час, а другие крупные аэропорты еще больше. Взлет машин обеспечивается собственными двигателями, при этом, чем меньше скорость самолета, тем ниже КПД турбореактивного двигателя, работающего на взлетном режиме.
Применение стартово-посадочных платформ с рекуперацией инерции позволит решить следующие технические проблемы:
1. Снижение расхода ископаемого топлива самолетами на взлете и посадке;
2. Сокращение разбега и пробега крупных лайнеров типа Боинг 747, Аэробус 380 и других в пределах комфортной для пассажиров инерции, и как следствие – снижение длины ВПП и площади земли, отчуждаемой аэропортами;
3. Снижение шумового воздействия на окружающую среду за счет уменьшения продолжительности работы двигателя на взлетном режиме и отказа от реверса на посадке;
4. Уменьшение износа поверхности ВПП за счет предотвращения проскальзывания шасси на посадке, а также ее аэроэрозии от потоков, создаваемых двигателями;
5. Снижение износа колес шасси самолетов на посадке и повреждений шасси при взлете и посадке и сокращение эксплуатационных затрат;
6. Повышение безопасности на взлете и посадке особенно при боковом ветре, увеличение предельного значения бокового ветра, обеспечение возможности посадки самолетов с неисправными шасси, аварийного сокращения пробега при посадке с поздним касанием
Предлагаемые аэродромные установки предназначены для применения в крупных аэропортах с интенсивным авиасообщением.
1. Раскрытие сущности изобретения
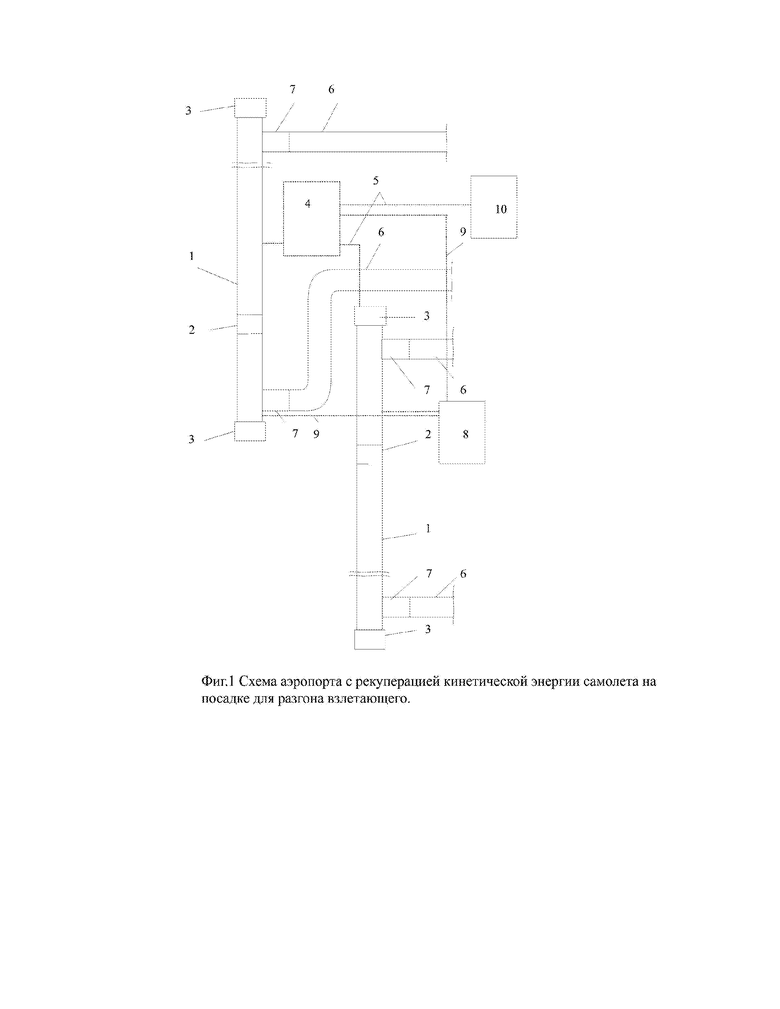
Для создания аэродромной установки могут использоваться две существующие, расположенные параллельно друг другу взлетно-посадочные полосы 1 (Фиг.1) действующих аэропортов при этом отводятся участки полос длиной около 2 км. Также полосы могут быть построены вновь. Одна из полос выполняет функции взлетной, вторая – посадочной с возможностью смены направления взлета и посадки в зависимости от направления ветра. На полосах 1, на вмонтированных рельсах 34 (Фиг.2) устанавливаются взлетно-посадочные аэродромные модули 2 с опорами на стальные катки. В полосы (Фиг.5) или по краям полос вмонтированы статоры линейных электрических машин 36 и независимые рельсы 37 для опоры секций бегуна 38 с короткозамкнутыми обмотками, которые связаны механически в направлении вдоль ВПП с модулями 2. На концах полос 1 оборудуются концевые площадки 3, предназначенные для подготовки модулей перед размещением на них самолетов в соответствии с их массой и габаритами, а также для размещения на них вспомогательных модулей. Для поднятия самолета на модуль 2, расположенный несколько выше ВПП, предусмотрены наклонные пандусы 7 длиной и наклоном, позволяющим перемещать по нему обслуживаемые самолеты в соответствии с принятой технологией транспортировки. К пандусам подходят рулежные полосы 6. Вблизи обеих полос или между ними располагается подземная аккумуляторно-конденсаторная подстанция 4, на которой устанавливаются, например, литий-ионные аккумуляторные батареи, конденсаторные батареи, а также устройства зарядки, автоматические устройства обслуживания и замены элементов, трансформаторы для связи с электрической сетью. Между аккумуляторной подстанцией 4 и ВПП 1 прокладываются силовые подземные кабельные линии 5, для связи с аккумуляторами и конденсаторами неподвижных обмоток статора. Для аварийных случаев обеспечения торможения самолета, то есть создания нагрузки линейным генераторам (когда аккумуляторы полностью заряжены и отсутствует выход в электрическую сеть) предусматривается поле нагрузочных резисторов (реостатов) 10 с воздушным охлаждением. Для контроля и управления аэродромной установкой необходим диспетчерский пункт 8, располагаемый вблизи или непосредственно в диспетчерском пункте аэропорта, от которого к полосам проложены оптические и проводные кабели для обеспечения основных и дублирующих каналов связи, дополнительно могут применяться радиосвязь и другие способы связи.
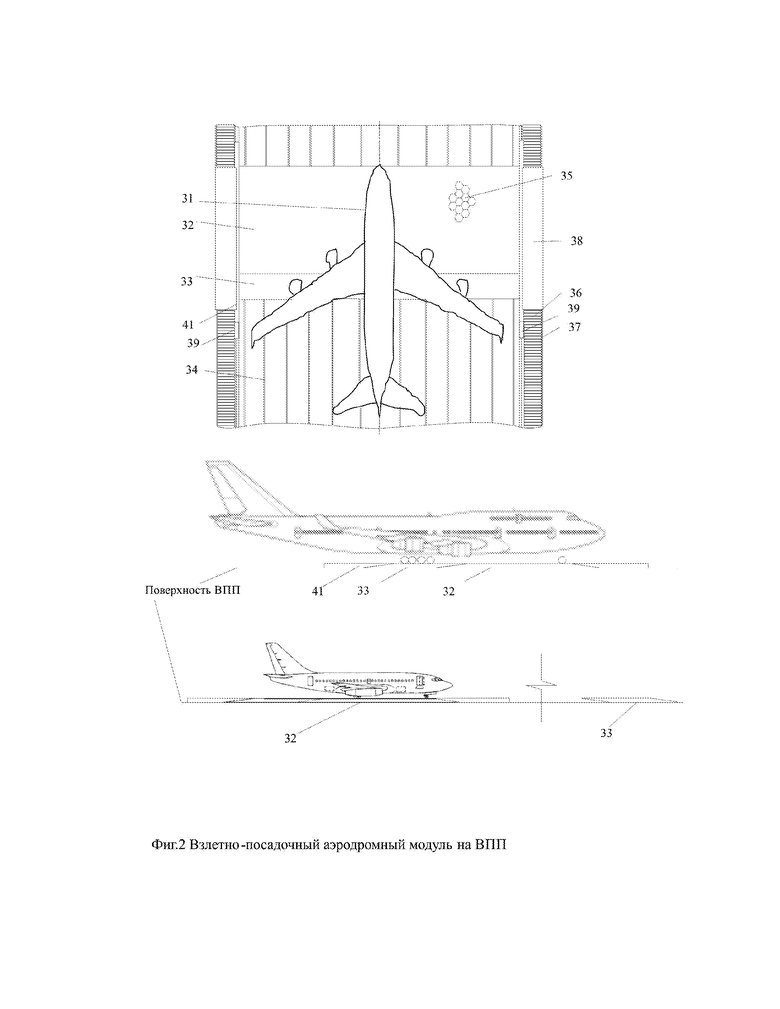
Для обеспечения посадки самолетов 31, значительно отличающихся по массе и габаритам друг от друга, на концевых площадках 3 находятся вспомогательные модули 33 (Фиг.2), которые в случае посадки или взлета крупного самолета крепятся к основному модулю 32 при помощи механизированных замков 44.
Если для создания аэродромных установок отводятся существующие полосы, то при отказе предлагаемой аэродромной установки самолет может совершить посадку на поверхность ВПП в обычном режиме, так как поверхность рельс находится на одном уровне с поверхностью ВПП. При этом вспомогательные модули перегоняются в конец ВПП. Аналогично сохраняется возможность взлета с поверхности ВПП.
Передняя и задняя поверхности основного модуля и крайние поверхности вспомогательных модулей (Фиг.2, Фиг.3) имеют наклонную поверхность 45: во-первых, для возможности схода самолета с модуля на полосу в движении при необходимости и во-вторых, для стыковки со вспомогательными модулями, имеющими стыковочную поверхность с обратным наклоном.
Боковые края модуля заканчиваются направляющими 41, ориентирующими модуль в движении вдоль ВПП, таким образом, чтобы опорные катки не смещались, относительно рельс. Для измерения тенденции модуля к боковому смещению или повороту на элементах направляющих устанавливаются тензодатчики боковых усилий 111. В законцовках направляющих 39 и спереди, и сзади размещаются тормозные парашюты для безопасного торможения модуля с самолетом при отказе электрической машины или по другим причинам на большой скорости.
Поверхность модуля закрывается корпусами подушек безопасности 35, которые одновременно исполняют роль нажимных элементов тензометрических датчиков для определения расположения самолета на модуле после касания, распределения нагрузки по точкам опоры, а так же ее изменения при торможении и разгоне самолета с изменением подъемной силы.
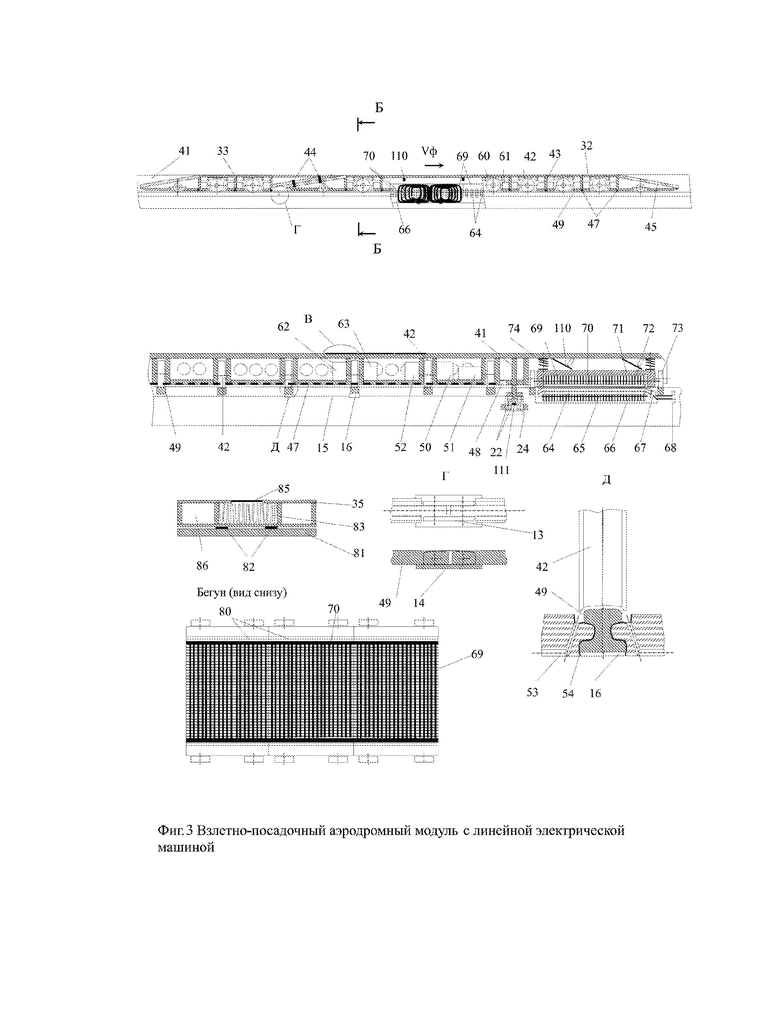
Аэродромный модуль (Фиг.3) состоит из основного модуля 32 и двух вспомогательных модулей 33, один из которых присоединяется к основному сзади при помощи механизированных замков 44. Второй вспомогательный модуль находится в конце ВПП и присоединяется сзади к основному модулю при изменении направления взлета. Каркас модуля 43 изготавливается из легкого и прочного материала (титан, дюралевые сплавы…) и опирается через плавающие подшипники на валы стальных катков 42. Снизу каркаса при помощи гидравлических домкратов 48 натягиваются стальные тросы 47, позволяющие более равномерно передавать нагрузку от самолета через катки на рельсы 49. Для управления натяжением тросов в модуле устанавливается насосная станция 50 с баком и системой трубопроводов. Для обеспечения питания системы автоматики 52 модуля устанавливаются автономные аккумуляторные батареи 51. Направляющая 41 предотвращает отрыв модуля от поверхности ВПП и боковое смещение и поворот в горизонтальной плоскости при помощи вертикальных и горизонтальных катков 22, опирающихся на соответствующие рельсы 24.
При монтаже на поверхность существующей ВПП 15 или подготовленное железобетонное основание на клиновые опоры 16 укладываются рельсы 49. Рельсы стыкуются на опорной пластине 14 при помощи накладки 13 двумя болтовыми соединениями, одно из которых выполнено с радиальным зазором для обеспечения температурной деформации. Рельсы имеют вертикальные выемки с двух боковых сторон для установки накладок с антифрикционным покрытием на прилегающих к рельсам сторонам. Поверхность концов рельс и накладок скругляется к концам, в результате каток без стука переходит с одной рельсы на накладки, а с них – на вторую рельсу. Это позволит снизить уровень шума. При помощи нивелира и смещения клиновых опор рельсы выставляются по горизонтали, укладываются дренажные трубопроводы и кабельные лотки и каналы, устанавливается и вяжется арматура, заливается бетон с устройством деформационных швов и выравниванием поверхности по нивелиру. При ремонте вскрывается участок бетона вдоль рельсы, которая заменяется или выставляется по горизонтали при помощи клиновых опор, затем заливается ремонтный состав.
Для обеспечения торможения модуля на малой скорости, в аварийных ситуациях при отказе линейных электрических машин, а так же для выравнивания продольной нагрузки на модуль при разгоне и торможении, в случае размещения самолета со смещением относительно центральной оси модуля, и недостаточности перераспределения нагрузки между правой и левой электрическими машинами предусматриваются механические тормозные колодки 60 с пневматическим приводом и песочницы 61, из которых при экстренном торможении сжатым воздухом на поверхность рельс под катки подается фрикционный материал, например из измельченных использованных автомобильных шин. Это повысит эффективность экстренного торможения, а при скольжении колес предотвратит повышенный износ, как в случае с песком на железнодорожном транспорте, где буксование (проскальзывание) не допускается.
Для обеспечения модуля сжатым воздухом устанавливается компрессор 62 с ресиверами и генератор 63 с приводом от катков.
Линейная электрическая машина имеет статор, вмонтированный или по краям ВПП или на самой ВПП и бегун с короткозамкнутой обмоткой, связанный с модулем.
Статор имеет магнитопровод 66, в пазы которого вмонтированы секции обмотки статора 64. Магнитопровод выполняется из листов материала с высокой магнитной проницаемостью, для создания магнитного поля с большей индукцией, покрытые электроизолирующим лаком. Листы магнитопровода статора соединены стяжными элементами 65. С обеих сторон статора укладываются рельсы 75 для опоры бегуна аналогично рельсам модуля. Устройство отдельных опорных рельс для бегуна, на которые не передается нагрузка от веса модуля с самолетом, позволяет создать минимальный воздушный зазор между зубцами магнитопроводов статора и бегуна с низкой магнитной проницаемостью, что также усиливает магнитное поле, уменьшает потери энергии на его создание и обеспечивает высокий КПД линейной электрической машины. Вблизи обмоток статора размещаются блоки силовых симисторов 67, связанные с шинами постоянного тока 68, а также блоки-формирователи управляющих импульсов и фотоэлементы датчиков положения бегуна. Сверху статор заливается тонким слоем гидроизолирующей, теплопроводящей, магнитопроницаемой, электроизолирующей мастики. Снизу и сбоку слой мастики получается толще, в нем же оказываются блоки симисторов 67, проводники и другие элементы электроборудования и автоматики. При посадке непосредственно на ВПП самолет может выехать на поверхность статора, так как она находится в одном уровне с поверхностью ВПП, что повышает безопасность посадки. Однако такой режим будет аварийным и потребует дефектовки и восстановления слоя мастики.
Бегун имеет составную конструкцию (Фиг.3). Прямоугольные в плане секции бегуна имеют магнитопровод 69, аналогичный магнитопроводу статора, в пазы которого укладываются витки короткозамкнутой обмотки 70. Листы магнитопровода в поперечном направлении стягиваются стяжными элементами 72 с корпусными деталями 71, к которым на осях через подшипники крепятся катки бегуна 73. В отдельные витки бегуна последовательно включаются трансформаторы тока, измеряющие силу тока для ограничения. Секции бегуна стыкуются друг к другу на концевых площадках 3 в зависимости от массы взлетающего и садящегося самолета и спереди и сзади упираются в опускаемые механизированные фиксаторы 110 модуля для передачи усилия от электрической машины модулю в режиме двигателя при разгоне и восприятия усилия модуля при торможении в режиме генератора. При этом бегун прижимается модулем через упругие элементы 74 к рельсам статора, для исключения отрыва бегуна при его движении и обеспечения минимального магнитного зазора. Вертикальная нагрузка от веса самолета и массы модуля на бегун непосредственно не передается, а только через упругие элементы.
Наиболее простой является схема асинхронного генератора, но в цепи должны быть включены конденсаторы, так как он потребляет реактивную мощность. Для регулирования мощности асинхронного генератора применяют частотное регулирование. Частотный преобразователь преобразует переменный ток в постоянный и затем при помощи контроллера формирует чередующиеся импульсы напряжения заданной полярности, частоты и скважности. То есть имеется участок цепи с постоянным напряжением в который можно включить аккумуляторы.
Линейная асинхронная машина содержит неподвижный статор с обмоткой и подвижный бегун с короткозамкнутыми по краям проводниками. Это необходимо для исключения подвижных силовых контактов. Витки секций обмотки статора и проводники бегуна располагаются параллельно друг другу и поперек направлению движения бегуна. Магнитопроводы статора и бегуна выполняются из тонколистового магнитопроницаемого материала электрически изолированными слоями, например из электротехнической стали, мюметалла, пермаллоя, наноперма или метгласа, вдоль направления движения бегуна или внахлест друг с другом для уменьшения искажения магнитного поля в местах стыка отдельных пластин, или в стык для облегчения замены витков обмотки и магнитопровода при ремонте. Чем выше магнитная проницаемость материала, тем больше будет создаваться индукция магнитного поля, соответственно тем больше будет мощность генератора при тех же весогабаритных показателях.
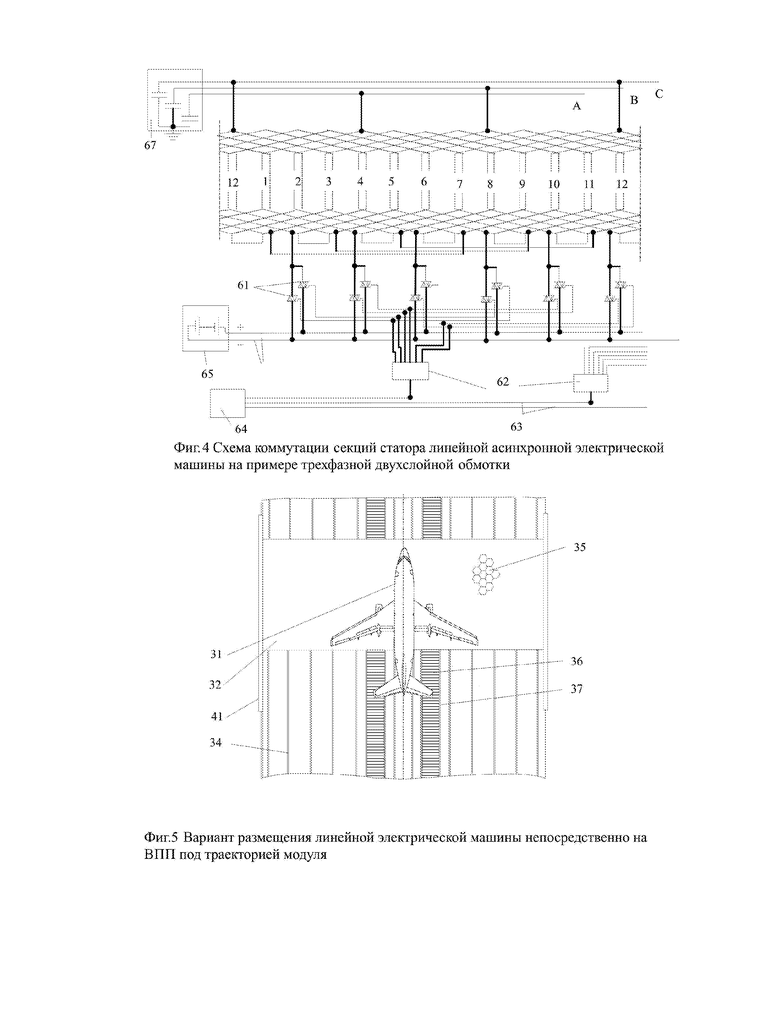
 Секции статора машины подключается через управляемые силовые симисторы 61 к шинам постоянного тока 66, идущим к аккумуляторной подстанции 65 (Фиг.4). К фазным выводам трехфазной двухслойной (в примере) обмотки подключены с обоих концов по два силовых симистора и к плюсовой шине, и к минусовой. Управляющий контакт симистора, связывающего начало одной из фаз с шиной «+», подключен к управляющему контакту симистора, связывающего конец этой же фазы с шиной «-».
Секции статора машины подключается через управляемые силовые симисторы 61 к шинам постоянного тока 66, идущим к аккумуляторной подстанции 65 (Фиг.4). К фазным выводам трехфазной двухслойной (в примере) обмотки подключены с обоих концов по два силовых симистора и к плюсовой шине, и к минусовой. Управляющий контакт симистора, связывающего начало одной из фаз с шиной «+», подключен к управляющему контакту симистора, связывающего конец этой же фазы с шиной «-».
Поверхность модулей 81 оснащается ячейками 35, в которых размещаются уложенные воздушные подушки 83 с пиропатронами 86. Ниша подушки закрывается легкоразрушаемой вставкой 85. Под ячейками устанавливают тензометрические датчики нагрузки 82. Поверхность ячеек покрывается антифрикционным материалом, обеспечивающим максимальное сцепление с колесами шасси самолета в любых условиях.
Площадки модуля над бегуном снизу оснащаются механизированными фиксаторами 110, управляемыми АСУ, располагаемыми на расстоянии друг от друга вдоль линейной машины равном одной секции бегуна. Привод фиксаторов может быть электромагнитным, гидравлическим или пневматическим. Причем опускаются фиксаторы только спереди и сзади всего набора секций бегуна. Прочность фиксаторов должна обеспечивать возможность передачи усилия от бегуна на модуль в обоих направлениях в любом режиме электрической машины.
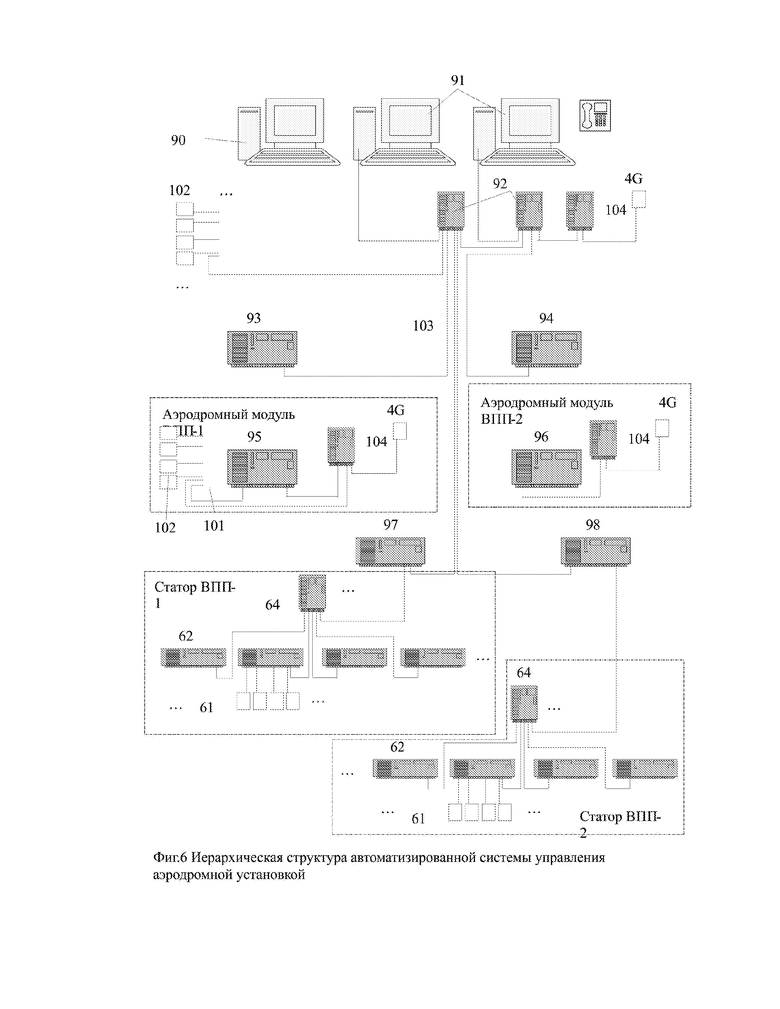
Автоматизированная система управления аэродромной установкой включает следующие основные элементы (Фиг.6). На верхнем уровне – два (основное и дублирующее) автоматизированное рабочее место (АРМ) диспетчера 91, а также сервер видеонаблюдения 90. АРМ связаны с коммутаторами 92 посредством витой пары и оптоволокна 103 и быстродействующего Ethernet протокола. К коммутаторам аналогично подключаются контроллеры аэродромной установки: 97 - контроллер защиты и управления линейной электрической машиной ВПП-1 и 98 – ВПП-2; через коммутаторы-модемы 4G 104 и антенны 4G происходит передача данных на контроллеры аэродромных модулей ВПП-1 – 95 и ВПП-2 – 96; 93 – контроллер аккумуляторно-конденсаторной подстанции и 94 – контроллер радиаторного поля. Полевые первичные преобразователи 102 через аналого-цифровые преобразователи (АЦП) 101 передают информацию о значениях всех параметров, используемых в управлении, на АРМ и контроллеры напрямую. Контроллеры получают информацию от полевых первичных преобразователей через АЦП и командные сигналы от АРМ в цифровом виде и управляют исполнительными механизмами и устройствами в соответствии с заложенными в них программами.
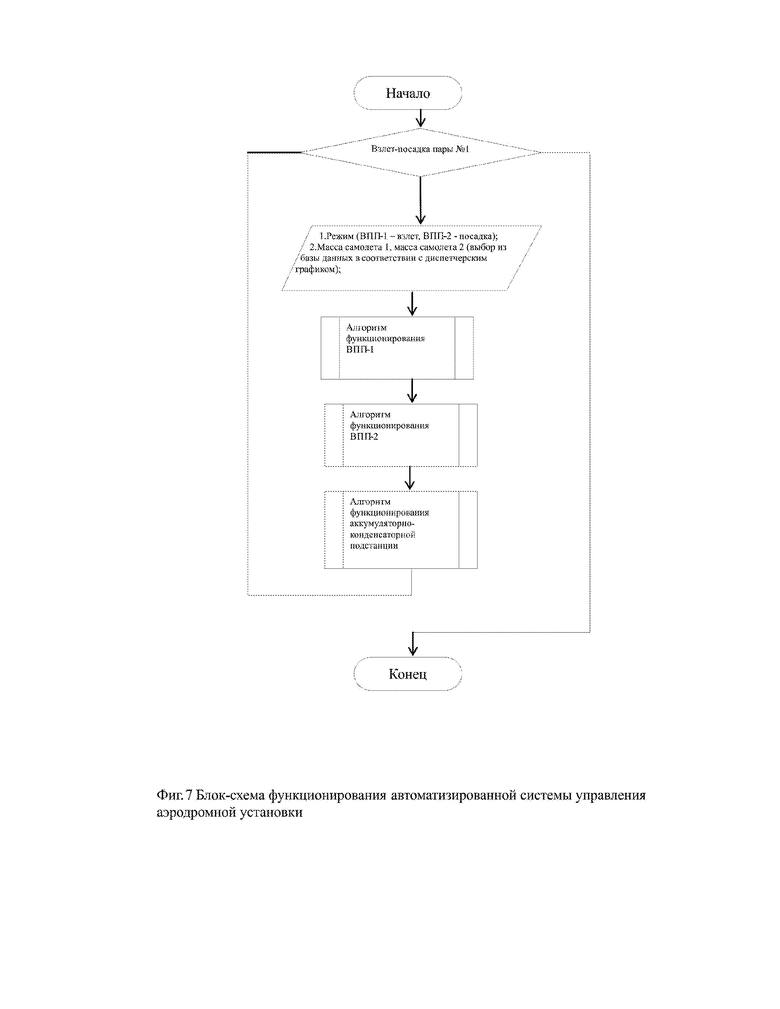
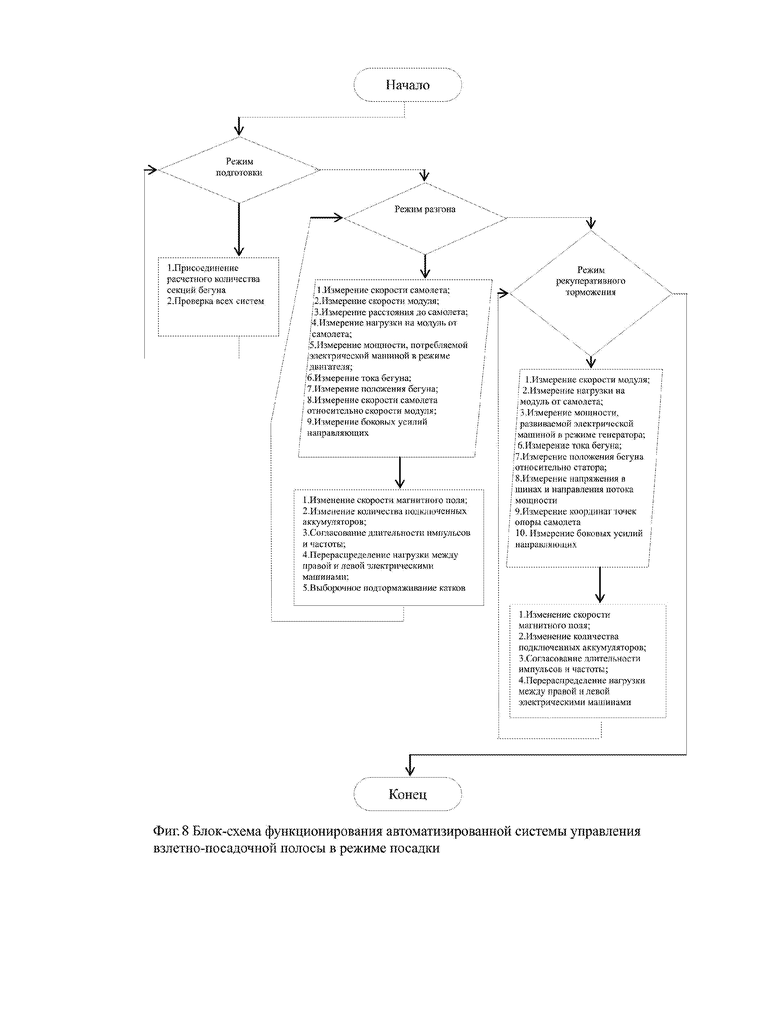
Управление работой аэродромной установки – автоматизированное с интерактивным программным комплексом (Фиг.7, Фиг.8).
Краткое описание чертежей
Фиг.1. Представлена схема аэропорта с аэродромной установкой рекуперации энергии. Взлетно-посадочные полосы, аэродромные модули с самолетами, аккумуляторно-конденсаторная подстанция, реостатное поле, кабельные линии, диспетчерский пункт, концевые площадки, рулежные полосы.
Фиг.2. Представлена схема размещения самолета на аэродромном модуле. Основной и дополнительный модули в сцепке и отдельно в конце ВПП.
Фиг.3 Представлена конструкция аэродромного модуля с линейной электрической машиной, размещаемой на рельсах.
Фиг.4 Представлена схема коммутации обмоток статора на примере трехфазной двухслойной обмотки.
Фиг.5 Представлен вариант размещения линейной электрической машины непосредственно на ВПП.
Фиг.6 Представлена иерархическая структура системы автоматического управления аэродромной установки.
Фиг.7 Представлен алгоритм функционирования АСУ аэродромной установки.
Фиг.8 Представлен алгоритм функционирования АСУ контроллера взлетно-посадочной полосы.
Осуществление изобретения
Составляется диспетчерский график, в котором подбираются самолеты для взлета и посадки по массе. При подлете самолета к аэропорту диспетчер дает команду на размещение взлетающего самолета на аэродромном модуле одной из полос, которая выбирается по направлению встречного ветра. Полоса для взлета (ВПП-2) должна быть расположена после полосы для посадки (ВПП-1) по направлению движения самолетов, для предотвращения опережения садящимся самолетом взлетающего, в целях повышения безопасности (Фиг.1).
Модуль с взлетающим самолетом готовится к взлету (Фиг.2, Фиг.3): при необходимости с основным модулем 32 сцепляется задний вспомогательный модуль 33 при помощи механизированных замков 44, второй вспомогательный модуль размещается в конце полосы и используется в качестве заднего дополнительного модуля при изменении направления взлета-посадки. На модуле размещается самолет 31, бортовой системой торможения блокируются колеса шасси, при помощи опускаемых механизированных стопоров 110 присоединяется друг к другу и к модулю в горизонтальном направлении определенное количество секций магнитопровода бегуна 69 с коротко-замкнутой обмоткой в зависимости от массы самолета. При помощи домкратов 48 подачей гидравлической жидкости под давлением создается преднатяг стальных тросов 47 под соответствующую массу самолета, что позволит равномернее передать и распределить усилие от самолета через модуль на рельсы ВПП.
В это время модуль ВПП-1 готовится к посадке конкретного самолета. Производятся аналогичные операции по сцепке основного и дополнительного модуля, формированию бегуна определенной длины и создания преднатяжения тросов 47.
На определенном расстоянии до подлетающего самолета подается команда на разгон модуля ВПП-1 таким образом, чтобы при заданном ускорении модуль достиг скорости садящегося самолета за некоторое время до касания колес шасси о поверхность модуля. Приближение самолета к модулю, его скорость, скорость модуля и их относительная скорость измеряется при помощи соответствующих первичных преобразователей с резервированием. Диспетчер дополнительно контролирует процесс разгона модуля и приближения самолета при помощи системы видеонаблюдения и при необходимости корректирует его. Решение о посадке на модуль принимает командир экипажа на основании визуального контроля положения модуля под самолетом и по наличию светового сигнала на модуле о готовности к приему самолета.
При работе электрической машины симисторы 61 статора (Фиг.4) открываются по команде, формируемой контроллером управления и защиты электрической машины 64, и передаваемой по оптической и дублирующей проводной Ethernet – линии связи 63 на местные блоки – формирователи управляющих импульсов 62. Управляющий импульс от блока-формирователя 62 подается одновременно на симисторы, которые подключают начало обмотки данной фазы к положительной шине, а конец – к отрицательной в момент времени и с продолжительностью, определяемой контроллером 64, таким образом, в обмотке формируется положительная полуволна. Аналогично, но открытием другой пары симисторов в обмотке другой фазы формируется отрицательная полуволна. В результате формируется импульс напряжения в секции статора задаваемой контроллером полярности, частоты и скважности. Аналогично функционируют асинхронные машины с частотным управляемым преобразователем. Напряжение на секции в этот момент времени определяется количеством аккумуляторов 65, включенных последовательно, управляемых контроллером 93 аккумуляторно-конденсаторной подстанции 4. В определенный момент времени аналогично подключается следующая фазная обмотка. Контроллер формирует бегущее вдоль статора магнитное поле. Кроме того, бегун передает информацию о его точном положении в контроллер, который включает только те обмотки, которые в этот момент времени находятся под бегуном.
Управление частотой подключения витков статора к шинам позволяет изменять скорость магнитного поля, благодаря чему возможен переход из двигательного режима в генераторный и наоборот. Так в начальный момент времени, когда модуль с бегуном неподвижен, в статоре формируется магнитное поле, бегущее с низкой скоростью в направлении разгона, таким образом, модуль начинает плавно разгоняться в выбранную сторону. Скорость модуля выравнивается со скоростью самолета до момента касания колес шасси поверхности модуля при помощи автоматической системы управления, в основе которой – контроллер управления и защиты электрической машины 97 (Фиг.6). После касания колес и обнаружения тензодатчиками 82, установленными на поверхности модуля, нагрузки от самолета контроллер уменьшает скорость бегущего вдоль статора магнитного поля, и машина переходит в генераторный режим. Модуль с самолетом начинает торможение в рекуперативном режиме. Источником электроэнергии становится статор, при этом меняется направление тока в шинах, начинается зарядка аккумуляторов. Величина замедления регулируется скольжением – отличием скорости бегуна от скорости магнитного поля статора, количеством подключенных к зарядке элементов аккумуляторных батарей и нагрузкой в двигательном режиме линейной электрической машины второго модуля ВПП-2, который разгоняет взлетающий самолет. Помимо комфортной для пассажиров величины, замедление ограничивается данными с тензодатчиков, которые анализирует контроллер модуля. При обнаружении опасности отрыва шасси от модуля или их проскальзывания контроллер ограничивает величину ускорения.
Ток в короткозамкнутой обмотке бегуна (ранера, слайдера) измеряется при помощи трансформаторов тока, включенных последовательно с некоторыми витками его обмотки. Витки с трансформаторами тока подбираются таким образом, чтобы они находились над несколькими обмотками статора разных фаз. Информация непрерывно с определенной частотой дискретизации направляется в контроллер 97. В случае достижения предельной величины тока в витках бегуна контроллер уменьшает скольжение или напряжение на шинах, подключаемых к статору.
Фактически в витках статора благодаря частотному модулированию (бесконтактной коммутации) возникает переменное электрическое поле. Со стороны статора, противоположной выводам фаз, подключаются фазные фидеры АВС, которые связаны с конденсаторной батареей 67. Включение конденсаторов необходимо для обеспечения машины в генераторном режиме реактивной мощностью, которую обычно из сети потребляют асинхронные генераторы. Таким образом, отключаемые витки статора отдают реактивную мощность на конденсаторы, которая потребляется подключаемыми витками обмотки.
После касания колес шасси модуля, определяемом по показаниям тензодатчиков 82, начинается торможение модуля (ВПП-1), при этом контроллер электрической машины разгонного модуля (ВПП-2) формирует в обмотке его статора сначала медленно бегущее магнитное поле, а затем по мере разгона модуля увеличивает его скорость. Пока бегун отстает от магнитного поля статора, линейная электрическая машина работает в режиме двигателя. Интенсивность разгона (потребляемая мощность) определяется в основном длиной активной части бегуна (составленного из секций магнитопровода), а корректируется оперативно скольжением.
В случае если в какие-то моменты времени вырабатываемая мощность превысит потребляемую, избыточная часть энергии будет накапливаться аккумуляторами в аккумуляторной подстанции. Наоборот, если для разгона потребуется большая мощность, чем обеспечит генератор, недостающая часть будет выдана аккумуляторами. Зарядка аккумуляторов будет происходить всякий раз, когда напряжение на шинах постоянного тока, создаваемое генератором превысит напряжение подключенных для зарядки аккумуляторов. Наоборот, если потребляемая разгонным модулем мощность достигнет вырабатываемого тормозным модулем уровня, напряжение на шинах начнет уменьшаться, и аккумуляторы начнут выдавать мощность для питания разгонного модуля.
После снижения скорости до определенной заданной минимальной величины модуль или подтормаживается собственными механическими тормозами или асинхронная линейная машина переводится в режим тормоза, при этом контроллер формирует бегущее в обратном направлении магнитное поле статора, но этот режим менее эффективен, так как приводит к дополнительным затратам энергии. После остановки модуля самолет традиционным способом проезжает по пандусу и рулежным полосам на место обслуживания пассажиров.
За некоторое время до отрыва взлетающего самолета от модуля, определяемое временем набора мощности и разгона двигателя, экипаж переводит двигатели на взлетный режим. При достижении разгонным модулем скорости отрыва для данного самолета, его вес на модуль, определяемый по показаниям тензодатчиков, снижается до 0, самолет начинает самостоятельный набор высоты. Линейная электрическая машина переводится в режим генератора и производит рекуперативное торможение пустого модуля до его полной остановки в районе концевой площадки.
Прямолинейность движения модуля обеспечивается перераспределением нагрузки между левой и правой половинами линейной электрической машины, а также при необходимости подтормаживанием катков, расположенных под правой или левой половинами модуля. По сигналам тензодатчиков боковых усилий 111, установленных на элементах направляющих 41, определяется тенденция к повороту модуля в горизонтальной плоскости и подается команда на устранение непрямолинейности.
После остановки модуля ВПП-1 с него удаляется самолет, а модуль возвращается в начало ВПП-1 для подготовки к приему следующего самолета. После остановки модуля ВПП-2 он также возвращается в начало ВПП-2 для подготовки к взлету следующего самолета.
Если от экипажа садящегося самолета поступает информация о неисправности шасси или диспетчер при помощи видеонаблюдения визуально обнаруживает неисправность шасси, он подает команду на срабатывание подушек безопасности 83. При этом воспламеняется пиропатрон 86 и пороховыми газами заполняется внутренняя полость подушки, разрушается легкоразрушаемая вставка 85 и подушка раскрывается вверх. Самолет совершает посадку на модуль с раскрытыми подушками безопасности на фюзеляж. Газы вытесняются под весом самолета через отверстия в подушках. Модуль совершает торможение в одном из безопасных режимов. Ячейки с подушками после срабатывания заменяются.
Если по каким-то причинам диспетчер или экипаж сочтет посадку на модуль более опасной, чем на поверхность ВПП, подается команда на экстренное торможение модуля, он остается сзади самолета. В этом случае самолет совершает посадку на поверхность ВПП в обычном режиме на шасси.
В случае внезапного заклинивания модуля, экипаж должен разблокировать бортовую тормозную систему. Самолет уже начнет сходить с модуля по наклонным поверхностям 45 на поверхность ВПП. Далее торможение самолета происходит в обычном режиме.
В случае отказа рекуперативной системы торможения, из консолей направляющих 41 выпускаются тормозные парашюты 39, создающие замедление на большой скорости, а затем при снижении скорости торможение происходит за счет заклинивания механическими колодками 60 катков 42, сцепление катков с рельсами повышается за счет подачи из «песочниц» 61 в зону контакта сжатым воздухом порошка из измельченных автомобильных покрышек. Это позволяет предотвращать повышенный износ при проскальзывании катков.
В случае если линейная электрическая машина исправна, а откажет аккумуляторная подстанция, торможение происходит в рекуперативном режиме с выдачей мощности в электрическую сеть через преобразователь постоянного тока в переменный и соответствующий трансформатор связи. Если в этот момент подключение к сети будет отсутствовать или сеть не сможет принять такой импульс мощности, энергия поглощается на реостатном поле 10.
При образовании наледи на рельсах, она разрушается катками наклонной поверхности 45, которые в холодный сезон заменяются на катки с насечками на поверхности и удаляется сжатым воздухом, имеющимся на модуле.
Охлаждение статора происходит в периоды времени между взлетами-посадками, а бегун охлаждается при движении вихрями воздуха, для этого боковые поверхности модуля не закрываются.
Дождевые воды с поверхности ВПП, статора и из полости катков направляющих удаляются по разветвленной системе дренажных трубопроводов 53 за пределы ВПП самотеком, а при необходимости - при помощи дренажных насосов, которые устанавливаются на коллекторных участках трубопроводов по всей длине ВПП.
Система автоматического управления аккумуляторно-конденсаторной подстанции, включающая контроллер и набор исполнительных узлов и механизмов, должна позволять в бесконтактном режиме при помощи полупроводниковых реле производить подключение к шинам батарей аккумуляторных элементов или параллельно или последовательно, регулируя, таким образом, напряжение на шинах, ток зарядки или разрядки аккумуляторов. Кроме того, она должна позволять автоматически заряжать аккумуляторы при необходимости от сети через зарядное устройство.
Возможен более простой вариант аэродромной установки рекуперации с одной взлетно-посадочной полосой, то есть энергия торможения сначала полностью поглощается аккумуляторами, хранится какое-то время до подготовки взлетающей машины, а затем возвращается ей при взлете. При этом аккумуляторы и конденсаторы могут располагаться вдоль ВПП и отвечать каждый за свой участок статора. Такая конструкция существенно уменьшит ресурс дорогостоящих аккумуляторов и повысит эксплуатационные расходы, но уменьшит начальные затраты на создание комплекса. Кроме того, снизится пропускная способность аэропорта по сравнению с вариантом с двумя ВПП.
Предлагаемая аэродромная установка рекуперации энергии самолета на посадке для разгона самолета на взлете позволяет повысить экономические показатели авиационного пассажирского сообщения, экологическую безопасность аэропортов и безопасность полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| АВИАЦИОННЫЙ ПУСКОВОЙ КОМПЛЕКС ПЕРЕНАПРАВЛЕНИЯ РЕАКТИВНЫХ СТРУЙ ДЛЯ СОКРАЩЕНИЯ РАЗБЕГА | 2015 |
|
RU2610317C1 |
| ПЛАТФОРМА ДЛЯ ВЗЛЁТА И ПОСАДКИ САМОЛЁТА, САМОДВИЖУЩАЯСЯ ПО РЕЛЬСАМ | 2018 |
|
RU2684546C2 |
| СПОСОБ ВЫВОДА В КОСМОС КОСМИЧЕСКИХ ОБЪЕКТОВ С ПОМОЩЬЮ МНОГОРАЗОВОЙ СИСТЕМЫ И СИСТЕМА ДЛЯ ВЫВОДА В КОСМОС КОСМИЧЕСКИХ ОБЪЕКТОВ | 2010 |
|
RU2454355C1 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| ТОРМОЗНАЯ СИСТЕМА МНОГОКОЛЕСНОГО САМОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 1995 |
|
RU2146625C1 |
| ТЕЛЕЖКА-ШАССИ АЭРОДРОМНОГО ОБСЛУЖИВАНИЯ ТЯЖЕЛОГО САМОЛЕТА | 2005 |
|
RU2299158C1 |
| АВИАЦИОННО-КОСМИЧЕСКИЙ СТАРТОВЫЙ КОМПЛЕКС "МАРС" | 2001 |
|
RU2215673C2 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 2006 |
|
RU2325307C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете содержит не менее двух взлетно-посадочных полос (ВПП), каждая из которых содержит аэродромный модуль, опирающийся стальными катками на опорные рельсы, две линейные электрические машины, размещаемые по краям полос, концевые площадки для подготовки модулей, пандусы, рулежные полосы, подземную (заглубленную) аккумуляторно-конденсаторную подстанцию, подземные кабельные силовые линии, линии связи, реостатное поле, диспетчерский пункт, участок электрической сети, управляемый автоматической системой управления. Обеспечивается снижение расхода топлива при взлете и посадке самолета, сокращение разбега, снижение шума, уменьшение износа поверхности ВПП, снижение износа колес шасси самолета, повышение безопасности на взлете и посадке. 2 з.п. ф-лы, 8 ил.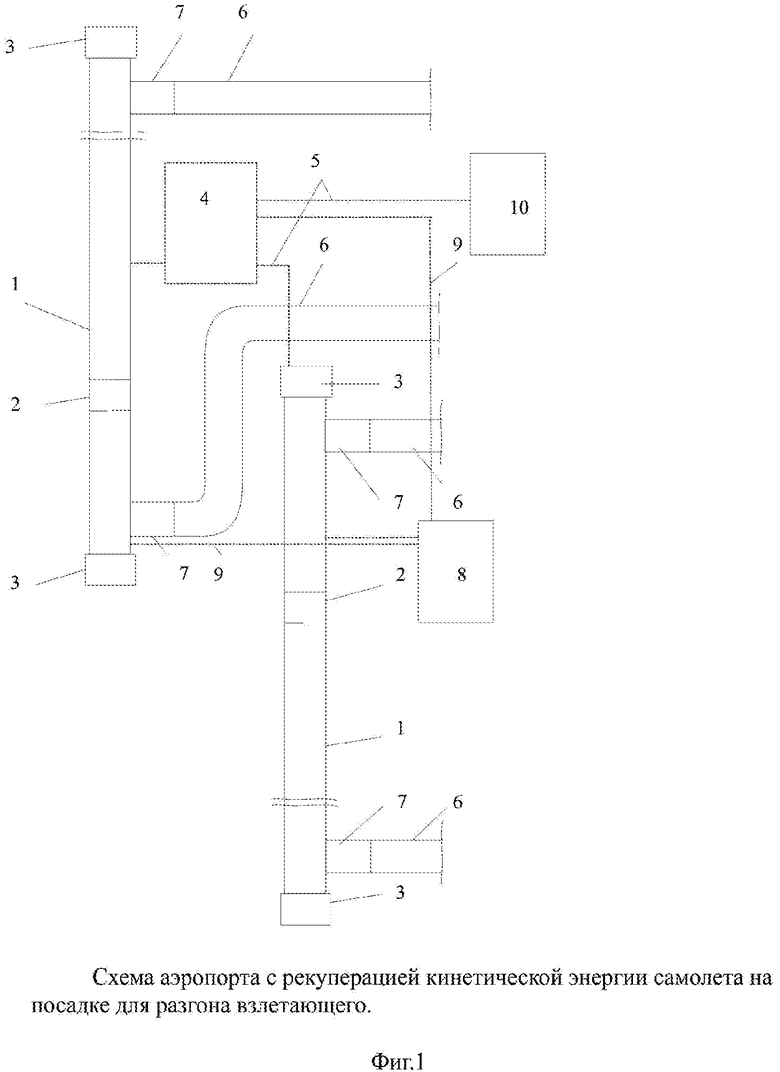
1. Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете, относящаяся к аэродромному оборудованию, предназначенному для приема самолета на посадке на специальную платформу, торможения его с преобразованием механической энергии в электрическую в линейной асинхронной электрической машине, временным хранением в аккумуляторных батареях и использованием ее (рекуперацией) для разгона взлетающих самолетов, состоящая из как минимум двух взлетно-посадочных полос, каждая из которых оборудована аэродромным модулем, состоящим из основной и двух дополнительных частей и опирающимся стальными катками на опорные рельсы, и двух линейных электрических машин, размещаемых или по краям полос, или непосредственно на полосах, концевых площадках для подготовки модулей, пандусов, рулежных полос, подземной (заглубленной) аккумуляторно-конденсаторной подстанции, подземных кабельных силовых линий и линий связи, реостатного поля, диспетчерского пункта и участка электрической сети, управляемая автоматической системой управления при помощи интерактивного программного комплекса, отличающаяся тем, что преобразуемая в линейной электрической машине энергия самолета на посадке на одной полосе используется для разгона в это же время взлетающего самолета на другой полосе с накоплением и временным хранением избыточной электроэнергии в аккумуляторных батареях и последующим потреблением ее для разгона взлетающего самолета, а в случае технологических отклонений выдачей избыточной мощности в сеть или преобразованием в тепловую энергию на реостатном поле.
2. Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете, относящаяся к аэродромному оборудованию, указанная в п. 1, содержащая асинхронную линейную электрическую машину, состоящую из левой и правой симметричных частей, размещаемых либо по краям взлетно-посадочной полосы, либо непосредственно на полосе, каждая из которых содержит неподвижный статор, вмонтированный во взлетно-посадочную полосу с витками обмотки, подключенными к шинам постоянного тока через силовые симисторы, управляемые автоматической системой управления и включаемые только под бегуном, уложенным в пазы магнитопроводов из листового материала с высокой магнитной проницаемостью, отличающаяся составным бегуном с короткозамкнутой обмоткой, каждая секция которого опирается четырьмя стальными катками на две отдельные рельсы, вмонтированные в линейную машину по краям статора, при этом усилие от веса приводимой конструкции на бегун не передается, а длина бегуна варьируется при подготовке к взлету или посадке в зависимости от массы самолета при помощи опускаемых механизированных фиксаторов, каждая пара из которых размещается с нижней стороны модуля через промежутки, равные длине одной секции бегуна.
3. Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете, относящаяся к аэродромному оборудованию, указанная в п. 1 в варианте, отличающемся наличием одной взлетно-посадочной полосы и расположением аккумуляторов вдоль нее с полным поглощением энергии самолета при торможении и последующей рекуперацией ее для разгона самолета при взлете на этой же полосе.
| US 8123163 B2, 28.02.2012 | |||
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2014 |
|
RU2565119C1 |
| WO 2004067850 A1, 12.08.2004 | |||
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |

