Настоящее изобретение относится к устройству для механической обработки материалов фрезерованием и/или бурением, в частности для удаления скальных пород, бетона, минералов или угля; при этом устройство содержит инструментальный барабан, который смонтирован на несущем устройстве для барабана и может вращаться вокруг оси барабана и в котором установлено несколько инструментальных валов с закрепленными на их концах механообрабатывающими инструментами, выступающими из инструментального барабана, при этом инструментальные валы могут приводиться во вращение, и, по меньшей мере, два инструментальных вала могут приводиться во вращение общим зубчатым приводом, который имеет выходные приводные шестерни, установленные с возможностью вращения на инструментальных валах, и общий приводной элемент, который взаимодействует с выходными приводными шестернями; причем приводной элемент и инструментальный барабан могут вращаться относительно друг друга, при этом устройство для механической обработки содержит устройство перемещения для перемещения несущего устройства для барабана относительно материала, подлежащего механической обработке, и управляющее устройство, с помощью которого может изменяться скорость перемещения несущего устройства для инструмента относительно материала и частота вращения инструментального барабана. Изобретение также относится к способу механической обработки материалов фрезерованием и/или бурением, в частности для удаления скальных пород, минералов или угля с помощью устройства, содержащего инструментальный барабан, который смонтирован на несущем устройстве для барабана и вращается вокруг оси барабана и в котором установлено несколько инструментальных валов, приводимых во вращение приводным элементом общего редуктора, при этом на концах инструментальных валов, выступающих из инструментального барабана, установлены механообрабатывающие инструменты, причем инструментальные валы вращаются с первой частотой вращения, а инструментальный барабан вращается со второй частотой вращения, при этом несущее устройство для инструмента перемещается относительно материала, подлежащего механической обработке, с помощью устройства для перемещения, а скорость перемещения несущего устройства для инструмента относительно материала и частота вращения инструментального барабана и/или инструментальных валов изменяются с помощью регулирующего устройства.
Устройства такого типа, с помощью которых может быть осуществлен вышеуказанный способ, известны, например, из EP 1841949 B1 и также из WO 2008/025555 A1. Используя устройства такого типа, можно обрабатывать с высокой скоростью фрезерования даже материалы, которые в ином случае с трудом поддаются механической обработке, например бетон, а также другие твердые материалы, такие как железная руда и т.п. В зависимости от выбранных параметров, таких как частота вращения инструментальных барабанов, передаточное отношение, материал, подлежащий удалению, и материал используемых инструментов, достигаются различные скорости удаления материала и сроки службы оборудования. Наблюдения во время эксплуатации показали, что в некоторых рабочих условиях могут быть достигнуты более высокие скорости удаления материала при меньшем износе, чем если бы были выбраны другие параметры, и что в то же время существуют критичные рабочие параметры, при которых могут возникать повреждения устройства и/или инструментов.
Задача настоящего изобретения состоит в том, чтобы усовершенствовать устройство таким образом, чтобы не возникали соответствующие критичные условия эксплуатации или чтобы они были исключены, и/или устройство могло эксплуатироваться при оптимизированных рабочих параметрах, а также определить способ использования соответствующего устройства для решения этой задачи.
Для решения этой задачи изобретение предлагает установить на устройстве, по меньшей мере, один измерительный датчик для измерения поступательного колебания устройства и/или, по меньшей мере, один измерительный датчик для определения углового колебания инструментального барабана, и управляющее устройство, содержащее, по меньшей мере, модуль анализа колебаний, с помощью которого во время анализа колебаний можно определить спектр колебаний, и содержащее, по меньшей мере, один модуль контроллера, с помощью которого частота вращения и/или относительная скорость могут регулироваться или регулируются как функция колебаний, определяемых модулем анализа. Исследования, выполненные заявителем, показали, что следует принять в расчет взаимодействие соответствующего инструмента и материала, подлежащего удалению, а также динамические характеристики, обеспечиваемые механической конструкцией устройства, в частности, совмещением вращения инструментального барабана и перемещения механообрабатывающих инструментов и инструментальных валов во время этого вращения. Для выработки соответствующей концепции измерения и управления на основе этих факторов естественные поступательные колебания устройства и/или угловые колебания инструментального барабана регистрируются посредством измерений и оцениваются во время соответствующего анализа колебания, и за счет использования анализа колебаний и спектра колебаний определяются параметры приведения в движение применительно к частоте вращения или относительной скорости, предпочтительно с помощью модуля контроллера или нескольких модулей контроллера. С этой целью модуль анализа колебаний и модуль контроллера могут, в частности, состоять из программ системы программного обеспечения управляющего устройства, в результате чего оценивается устанавливаемый и измеряемый спектр колебаний, предпочтительно в режиме реального времени, с последующим регулированием устройства для обеспечения улучшенных рабочих характеристик с помощью вышеуказанных параметров, в частности
частоты вращения и/или относительной скорости.
Соответственно возможной конструкции устройство может иметь инструментальный барабан с барабанным приводом, который отделен от зубчатого привода для инструментальных валов, и в этой конфигурации устройства отношение частот вращения регулируется с помощью регулирующего устройства в качестве дополнительного параметра управления. Однако устройство также может иметь конструкцию, в которой инструментальный барабан и инструментальные валы соединены и имеют общий вращательный привод и, соответственно, инструментальный барабан образует солнечное колесо, и инструментальные валы образуют соответствующие планетарные передачи. В случае устройства с фиксированным отношением частот вращения инструментального барабана и инструментальных валов это отношение частот образует применительно к устройству фиксированную переменную, которая, несмотря на то, что она может иметь оптимальную заводскую настройку для обеспечения соответствующей рабочей характеристики, не может варьироваться во время процесса непрерывной эксплуатации.
Модуль анализа колебаний может, в частности, использовать FFT-алгоритм (алгоритм быстрого преобразования Фурье). Как вариант, модуль анализа колебаний может, к примеру, использовать преобразование элементарных волн, поскольку отображение частоты и времени всегда могут быть проанализированы при относительно быстром преобразовании с помощью элементарных волн.
Соответственно преимущественному усовершенствованию устройства устройство перемещения может содержать поворотное плечо, и скорость поворота поворотного плеча может варьироваться в качестве параметра управления. Как вариант, устройство перемещения может содержать цевочную рейку или зубчатую рейку и, по меньшей мере, одну шестерню, входящую в зацепление с рейкой, и частота вращения шестерни может регулироваться в качестве параметра управления.
Барабанный привод и/или зубчатый привод предпочтительно содержат плавно регулируемые приводы.
Помимо основной частоты колебаний или частоты возбуждения, как правило, спектр колебаний также содержит гармонические колебания частоты возбуждения и субгармонические колебания частоты возбуждения. Согласно преимущественной концепции управления частота вращения и/или относительная скорость могут регулироваться или регулируются таким образом, что гармонические колебания имеют определенную связь с основными колебаниями. В этом отношении анализ колебаний показал, что угловые колебания обычно в 10 раз превышают поступательные колебания. С помощью соответствующего регулирования кинематических характеристик устройства гармонические колебания, определяемые при анализе колебаний, могут соответственно регулироваться таким образом, чтобы обеспечивались только конкретные частоты или порядки гармонических частот. Однако для усиления эффекта удаления материала управление также может выполняться таким образом, чтобы гармонические колебания имели усиливающий эффект. Согласно другой концепции управления субгармонические колебания могут определяться или определяются из анализа колебаний и спектра колебаний или частота вращения и/или относительная скорость могут регулироваться или регулируются таким образом, чтобы субгармонические колебания принимали конкретное заданное значение по отношению к основным колебаниям. Согласно еще одной альтернативной концепции управления нелинейные субгармонические колебания могут определяться или определяются из анализа колебаний, и регулирующее устройство снабжено модулем контроллера, с помощью которого скорость устройства перемещения или глубина проникновения в материал могут регулироваться таким образом, чтобы субгармонические колебания достигали требуемого значения. Соответствующая концепция управления также может зависеть от того, должно ли изобретение обеспечивать максимально возможные характеристики применительно к удалению материала или даже его разрушение при низком износе и, таким образом, длительный срок эксплуатации устройства. За счет регулирования устройства и обеспечения устойчивых характеристик колебания, в то же время, принимая во внимание гармонические колебания и/или субгармонические колебания, можно значительно повысить эффективность процесса удаления материала и прежде всего можно оптимизировать нелинейные рабочие характеристики устройства, поскольку именно за счет нелинейных рабочих характеристик будет иметь место увеличение нагрузки на устройство при снижении характеристик разрушения материала. Параметры регулирования, в частности частота вращения и скорость подачи и, при необходимости, глубина врезания, могут, в частности, изменяться в соответствии с временной конфигурацией.
Измерительные датчики для определения естественных последовательных колебаний могут содержать датчик ускорений, в частности, пространственный датчик ускорений. Измерительный датчик, используемый для определения угловых колебаний, может быть абсолютным энкодером для непосредственных измерений, который устанавливается на инструментальном барабане, в частности, индуктивным датчиком, или инструментальный барабан или компонент, устанавливаемый с возможностью вращения на инструментальный барабан, может быть снабжен, к примеру, датчиком Холла. Измерительный датчик для определения угловых колебаний также может содержать датчики момента, устанавливаемые на инструментальные валы.
Вышеуказанная задача достигается на основе способа, в котором с помощью измерительного датчика измеряются последовательные колебания устройства и/или с помощью измерительного датчика определяются вращательные перемещения инструментального барабана, спектр колебаний образуется или определяется с помощью анализа колебаний применительно к определяемому колебанию или определяемым колебаниям, и частота вращения и/или относительная скорость регулируется как функция колебаний, определяемых за счет использования модуля анализа. Управление может осуществляться таким образом, чтобы частота вращения и/или относительная скорость регулировались таким образом, чтобы гармонические колебания, которые в каждом случае могут определяться по спектру колебаний, достигали требуемого значения по отношению к основным колебаниям. Как вариант или дополнительно, управление может осуществляться таким образом, чтобы субгармонические колебания определялись из анализа колебаний или спектра колебаний, и частота вращения и/или относительная скорость регулировались таким образом, чтобы эти субгармонические колебания достигали требуемого значения по отношению к основным колебаниям или, как вариант, субгармонические колебания определялись из анализа колебаний, и регулирующее устройство было снабжено модулем контроллера, с помощью которого регулируются скорость устройства перемещения или глубина проникновения в материал, так чтобы обеспечить оптимизацию субгармонических колебаний.
Другие преимущества и усовершенствования по изобретению станут понятными из приведенного ниже описания примерного варианта выполнения, схематично показанного на чертежах.
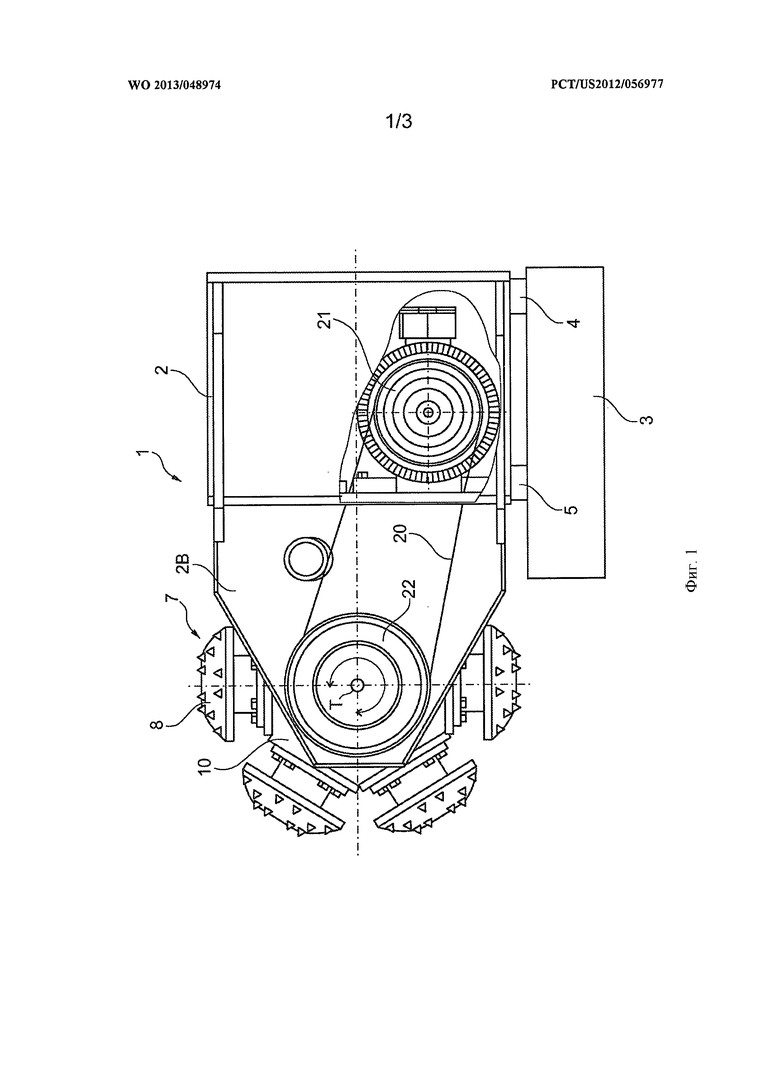
На фиг. 1 показан схематичный вид сбоку устройства по изобретению, которое может линейно перемещаться вдоль цевочной рейки;
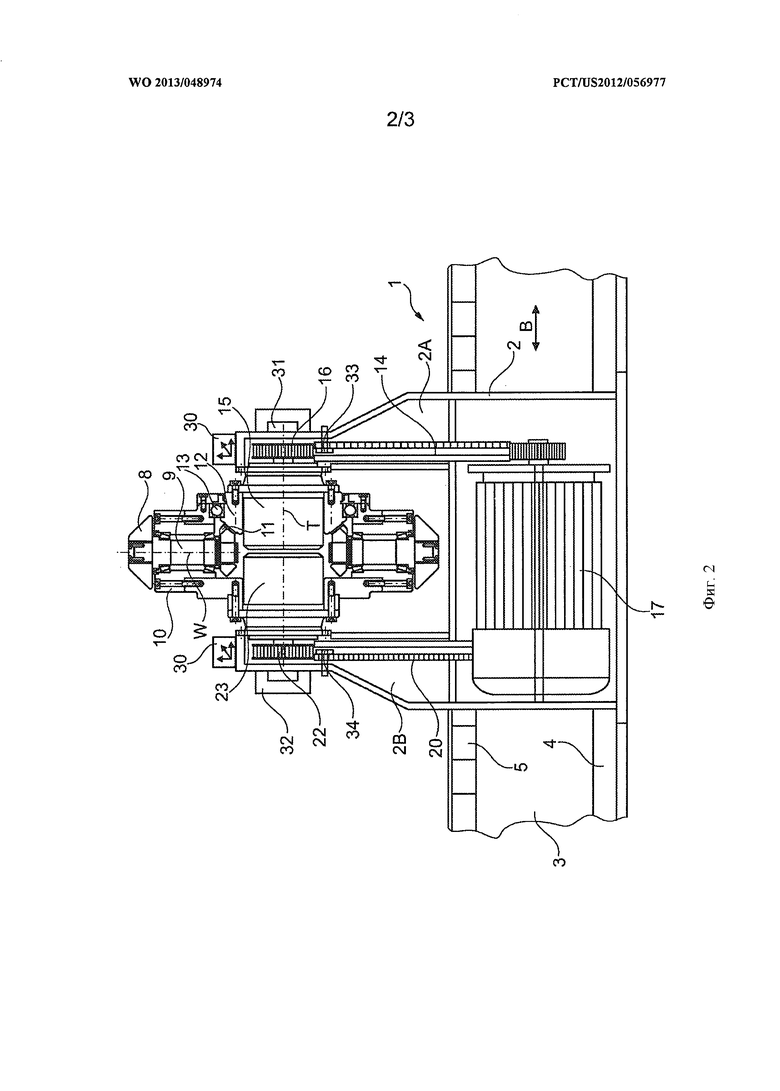
на фиг. 2 - схематичный вид сверху устройства из фиг. 1; показаны внутренняя конструкция и расположение измерительных датчиков; и
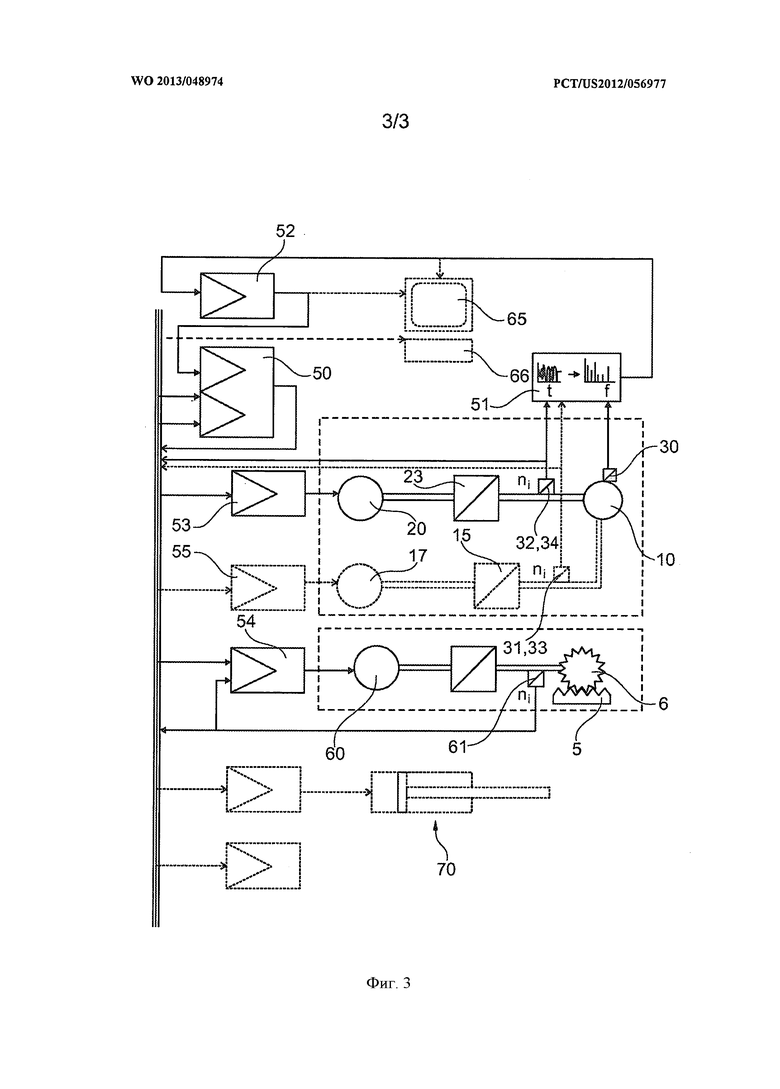
на фиг. 3 - схема управления, показывающая возможности управления устройством из фиг. 1 и 2.
На фиг. 1 и 2 в весьма упрощенной форме и только с целью общего объяснения идеи изобретения схематично показано устройство, в общем обозначенное ссылочным номером 1, которое имеет корпус 2, расположенный вдоль конструкции 3 зубчатой рейки или цевочной рейки, которая помимо направляющих 4 также имеет зубчатую рейку 5, с которой входит в зацепление шестерня (обозначенная ссылочным номером 6 и показанная только на фиг. 3) в качестве линейного привода для перемещения устройства 1. С помощью конструкции 3 цевочной рейки и шестерни 6, приводимой в действие соответствующим электродвигателем, устройство 1 может перемещаться с различными скоростями параллельно удаляемому материалу, например, забою минерализованной породы или угольному забою, а также параллельно бетонной стене и т.п. Удаление материала осуществляется с помощью отдельных инструментов 7, которые распределены в окружном направлении в несколько рядов на инструментальных головках 8, установленных на инструментальном барабане 10 с помощью инструментальных валов 9, показанных на фиг. 2. Инструментальный барабан 10, показанный в примерном варианте выполнения, имеет ось T барабана, которая параллельна направлению перемещения, показанному на фиг. 2 стрелкой B. В окружном направлении барабана 10 в показанном примерном варианте выполнения на барабане установлены шесть инструментальных валов 9 с соответствующими инструментальными головками 8, при этом в показанном примерном варианте выполнения оси W отдельных инструментальных валов 9 перпендикулярны оси T барабана. Для поддержки поворотного инструментального барабана 10 на корпусе 2 устройства корпус 2 снабжен консолью 2A, 2B, соответственно, с обеих сторон инструментального барабана 10.
В показанном примерном варианте выполнения каждый инструментальный вал 9 соединен на конце, расположенном с противоположной стороны от инструментальной головки 8 внутри инструментального барабана 10, с выходной приводной шестерней 11, входящей в зацепление с другой шестерней 12, которая является общим приводным элементом для всех инструментальных валов 9. Шестерня 12 в качестве приводного элемента может вращаться относительно инструментального барабана 10 за счет установки на подшипники 13, причем приводная шестерня 12 в показанном примерном варианте выполнения может приводиться в движение приводом 17 через зубчатый ремень 14, который входит в зацепление с первым ременным шкивом 16, прикрепленным к входу, например, к опоре 15 шестерни. Кроме того, инструментальный барабан 10 также может приводиться в действие вторым зубчатым ремнем 20 и барабанным приводом 21, который расположен за приводом 17 и не показан на фиг. 2, но показан на фиг. 1, для чего, в свою очередь, на входной стороне второй опоры 23 шестерни крепится другой ременной шкив 22. Две опоры 15 и 23 шестерней также могут содержать другие редукторные модули для приведения в действие инструментального вала 9 через привод 17 и инструментального барабана 10 через привод 21, соответственно, независимо друг от друга. Основная конструкция устройства также описывается, например, в документе WO 2008/025555 A1, на содержание которой дополнительно приведена ссылка. Поскольку без отклонения от изобретения внутренняя структура устройства или барабана также могла бы быть такой, что инструментальные валы выступали бы наклонно относительно оси барабана, и/или перемещение всего устройства осуществлялось бы под прямыми углами к оси барабана, как описано в WO 2008/025555 A1, а не параллельно оси барабана, в этом отношении также дополнительно сделана ссылка на вышеуказанное описание.
Для достижения улучшенных рабочих характеристик устройства 1 и внедрения соответствующих способов приведения в действие устройства 1 в примерном варианте выполнения в каждом случае на опорные кронштейны 2A, 2B устанавливается измерительный датчик 30 для измерения поступательных колебаний в устройстве 1, при этом измерительные датчики предпочтительно состоят из пространственных датчиков ускорения. Зубчатый привод (14, 15, 16, 17) для инструментального вала 9 снабжен измерительным датчиком 31 для измерения абсолютной частоты вращения, например, ременного шкива 16, и зубчатый привод (20, 21, 22, 23) инструментального барабана 10 снабжен измерительным датчиком 32 в качестве датчика абсолютных значений для измерения частоты вращения ременного шкива 22. Ременной шкив 16 для инструментального вала 9 дополнительно снабжен измерительным датчиком 32, например, датчиком Холла, и/или зубчатый ременной шкив 22 снабжен дополнительным измерительным датчиком 34, например, еще одним датчиком Холла, что позволяет определять угловые колебания зубчатого ременного шкива 16, действующие на инструментальный вал 9, с помощью систем 31, 33 датчиков и определять угловые колебания инструментального барабана 10 с помощью системы 32, 34 датчиков. Для определения угловых колебаний вместо датчиков Холла также можно использовать индуктивные датчики и другие датчики.
Ниже со ссылкой на схематичный чертеж из фиг. 3 приводится описание концепции управления устройством, показанным на фиг. 1 и 2. Если на схематичном чертеже показаны измерительные датчики или компоненты из фиг. 1 и 2, то такие же ссылочные номера используются и на фиг. 3. Это относится, например, к зубчатой рейке 5, приводной шестерне 6, входящей в зацепление с вышеуказанной рейкой, инструментальному барабану 10, редукторам 15, 23 и электродвигателям 17, 20.
Для приведения устройства в действие это устройство снабжено системой 50 управления устройством в качестве управляющего устройства, на которое, например, по каналу обратной связи передаются значения, измеренные датчиками 32, 34 частоты вращения и угловых колебаний, предусмотренными для инструментального барабана 10. То же самое относится и к значениям, измеренным с помощью измерительных датчиков 31. 33. Значения угловых колебаний, определяемые системами 32, 34 и 31, 33 датчиков, передаются в модуль 51 анализа колебаний, который предпочтительно внедрен с использованием программного обеспечения системы управления устройством, и с помощью соответствующих способов частотного анализа, таких как частотный FFT-анализ или преобразование элементарных волн, определяется и оценивается соответствующий спектр колебаний применительно к базовым колебаниям, гармоническим колебаниям, субгармоническим колебаниям, удвоениям периодов, амплитудам колебаний и т.д. В модуль 51 анализа колебаний также передаются значения, измеренные измерительными датчиками 30, для измерения естественных поступательных колебаний устройства, и с помощью соответствующего модуля 52 контроллера, который предпочтительно может состоять из соответствующих программ системы программного обеспечения, определяются параметры управления и параметры приведения в действие в системе 50 управления устройством, используя значения характеристик, определяемых посредством измерения естественных поступательных колебаний и угловых колебаний. Используя колебания, определяемые как базовые колебания, например, имеющие частоту возбуждения f, используя гармонические колебания, имеющие значения целого кратного от частоты возбуждения f (соответственно 2f, 3f, …) и/или используя субгармонические колебания, например, имеющие частоты f/2, f/3, f/4, … от частоты возбуждения f, определяются значения с помощью модуля 51 анализа колебаний, используя спектр колебаний, и контроллера 52, присоединенного после вышеуказанного модуля, например, с помощью контроллера или частотного преобразователя 53, при этом система 50 управления устройством контролирует частоту вращения привода 20 для инструментального барабана 10 и/или с помощью контроллера 54 относительную скорость всего устройства 1 относительно материала, подлежащего удалению, с помощью параметров привода электродвигателя 60 для приводной шестерни 6, варьируемых с помощью контроллера 54. В этом случае в качестве регулируемой переменной может быть еще раз определена абсолютная частота вращения привода с помощью дополнительного измерительного датчика 61 и обратной связи с системой 50 управления устройством.
Если, как в показанном примерном варианте выполнения, частота вращения инструментальных валов может регулироваться независимо от частоты вращения инструментального барабана 10, общая концепция управления также будет предусматривать дополнительный контроллер или частотный преобразователь 55, который относится к приводу 17 для инструментальных валов 9, при этом значения угловых колебаний этой цепи привода будут передаваться в модуль 51 анализа колебаний с помощью системы 31, 33 измерительных датчиков. С целью визуального наблюдения может быть предусмотрен монитор 65, и для регистрации и оценки отдельных значений, выполняемых контроллерами и модулями, может быть предусмотрено устройство 66 отображения и записи информации.
Концепция управления и способы приведения в действие, которые могут быть внедрены применительно к соответствующему устройству, могут распространяться на другие устройства или способы разрушения удаляемого материала. Например, все устройство дополнительно может иметь устройство 70 подачи, с помощью которого, к примеру, все устройство может поворачиваться вертикально или как дополнительный параметр управления может регулироваться глубина врезания.
Система измерения и управления может, к примеру, обеспечить внедрение последовательности операций, так чтобы с помощью параметров машины применительно к скорости перемещения устройства, с помощью частоты вращения применительно к инструментальным валам и с помощью частоты вращения инструментального барабана 10 отрегулировать кинематические характеристики всего устройства таким образом, чтобы уменьшить гармонические колебания, определяемые во время частотного анализа. С этой целью в первом приближении могут быть отрегулированы отношение частот инструментального барабана 10 и инструментальных валов 9 и отношение скорости перемещения к одной из двух частот угловой скорости. С помощью одного из модулей контроллера приведение в действие может быть выполнено таким образом, чтобы все нелинейные факторы были оптимизированы и, к примеру, с этой целью сведены к минимуму, т.е., чтобы не возникали никакие субгармонические колебания при этом возникновение соответствующих субгармонических колебаний во время выполнения рабочих операций определяется в непрерывном режиме посредством анализа колебаний. В предельных случаях для исключения перегрузок, к примеру, глубина врезания также могла бы варьироваться.
Устройство и способ по изобретению не ограничиваются до предыдущего примерного варианта выполнения. Все устройство также могло бы эксплуатироваться с одиночным приводом для инструментального барабана и инструментальных валов, так чтобы инструментальный барабан мог иметь конструкцию наподобие солнечного зубчатого колеса, и инструментальные валы имели бы постоянную частоту вращения по отношению к солнечному колесу. Однако важно, чтобы при использовании способа разрушения удаляемого материала выполнялось совмещенное вращение инструментального барабана и вращение инструментальных валов с установленными на них инструментами, и колебания, возникающие в результате совместного функционирования, могли использоваться в качестве параметров привода для регулируемых переменных машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЧЕСКИМИ КОЛЕБАНИЯМИ КАЧЕЛЕЙ, ВЫПОЛНЕННЫХ С ВОЗМОЖНОСТЬЮ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОЙ ПЛОСКОСТИ | 2022 |
|
RU2806350C1 |
| Стенд для испытания рулевого управления автомобиля | 1981 |
|
SU1026033A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| ПРОМЫШЛЕННАЯ МАШИНА И СПОСОБ ОРЕДЕЛЕНИЯ РЕГУЛИРУЕМОГО ПРОКЛАДКАМИ ЗАЗОРА ОПОРНОГО БЛОКА ПРОМЫШЛЕННОЙ МАШИНЫ (ВАРИАНТЫ) | 2013 |
|
RU2615535C2 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2022672C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕМЕНТОВ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2568959C1 |
| Способ и устройство измерения крутящего момента приёмного вала горячештамповочного пресса для измерения его усилия | 2023 |
|
RU2820805C1 |
Группа изобретений относится к способу и устройству для механической обработки материалов фрезерованием и/или бурением, в частности для удаления скальных пород, бетона, минералов или угля. Технический результат – усовершенствование устройства механической обработки. Устройство содержит инструментальный барабан, в котором установлено несколько инструментальных валов с закрепленными на их концах механообрабатывающими инструментами, выступающими из инструментального барабана. При этом инструментальные валы могут приводиться во вращение. Приводной элемент для инструментальных валов и инструментальный барабан могут вращаться относительно друг друга, причем несущее устройство для барабана может перемещаться относительно материала с помощью устройства перемещения. С помощью управляющего устройства могут изменяться скорость перемещения несущего устройства для инструмента относительно материала и частота вращения инструментального барабана. Во избежание возникновения критичных условий эксплуатации устройство снабжено, по меньшей мере, одним измерительным датчиком для измерения естественного поступательного колебания и/или, по меньшей мере, одним измерительным датчиком для определения угловых колебаний инструментального барабана, и управляющим устройством, которое содержит, по меньшей мере, один модуль анализа колебаний, с помощью которого во время анализа колебаний можно определять спектр колебаний, и, по меньшей мере, один модуль контроллера, с помощью которого частота вращения и/или относительная скорость являются регулируемыми или регулируются как функция колебаний, определяемых модулем анализа. Способ механической обработки материалов с помощью устройства. 2 н. и 23 з.п. ф-лы, 3 ил.
1. Устройство для механической обработки материалов фрезерованием и/или бурением, в частности для удаления скальных пород, бетона, минералов или угля, содержащее инструментальный барабан (10), который установлен на несущем устройстве (2А, 2В) для барабана с возможностью вращения вокруг оси (Т) барабана и в котором установлено несколько приводимых во вращение инструментальных валов (9) с закрепленными на их концах механообрабатывающими инструментами (7), выступающими из инструментального барабана (10), при этом по меньшей мере два инструментальных вала (9) являются приводимыми в движение общим зубчатым приводом, который имеет выходные приводные шестерни (11), установленные с возможностью поворота на инструментальных валах (9), и общий приводной элемент (12), взаимодействующий с выходными приводными шестернями (11), причем приводной элемент (12) и инструментальный барабан (10) имеют возможность вращения относительно друг друга, при этом устройство для механической обработки содержит устройство (6, 7) перемещения для перемещения несущего устройства для барабана относительно подлежащего механической обработке материала и управляющее устройство (50), предназначенное для изменения скорости перемещения несущего устройства (2) для инструмента относительно материала и частоты вращения инструментального барабана (10), отличающееся тем, что оно снабжено по меньшей мере одним измерительным датчиком (30) для измерения поступательного колебания устройства и/или по меньшей мере одним измерительным датчиком (32; 34) для определения угловых колебаний инструментального барабана (10), при этом управляющее устройство (50) содержит по меньшей мере один модуль (51) анализа колебаний, выполненный с возможностью, во время анализа колебания (колебаний), определения спектра колебаний, и по меньшей мере один модуль контроллера, с помощью которого частота вращения и/или относительная скорость являются регулируемыми или регулируются как функция колебаний, определяемых модулем (51) анализа.
2. Устройство по п. 1, отличающееся тем, что инструментальный барабан (10) имеет барабанный привод (21), который отделен от зубчатого привода (17) для инструментальных валов (9), при этом управляющее устройство (50) выполнено с возможностью регулирования отношения частот вращения в качестве дополнительного параметра управления.
3. Устройство по п. 1, отличающееся тем, что инструментальный барабан и инструментальные валы имеют общий вращательный привод.
4. Устройство по п. 1, отличающееся тем, что модуль (51) анализа колебаний использует FFT-алгоритм.
5. Устройство по п. 2, отличающееся тем, что модуль (51) анализа колебаний использует FFT-алгоритм.
6. Устройство по п. 3, отличающееся тем, что модуль (51) анализа колебаний использует FFT-алгоритм.
7. Устройство по любому из пп. 1-6, отличающееся тем, что модуль анализа колебаний использует преобразование элементарных волн.
8. Устройство по любому из пп. 1-6, отличающееся тем, что устройство перемещения содержит поворотное плечо, скорость поворота которого является изменяемой в качестве параметра управления.
9. Устройство по п. 7, отличающееся тем, что устройство перемещения содержит поворотное плечо, скорость поворота которого является изменяемой в качестве параметра управления.
10. Устройство по любому из пп. 1-6, 9, отличающееся тем, что устройство перемещения содержит цевочную рейку (5) или зубчатую рейку и по меньшей мере одну шестерню (6), входящую в зацепление с рейкой, причем частота вращения шестерни является изменяемой в качестве параметра управления.
11. Устройство по п. 7, отличающееся тем, что устройство перемещения содержит цевочную рейку (5) или зубчатую рейку и по меньшей мере одну шестерню (6), входящую в зацепление с рейкой, причем частота вращения шестерни является изменяемой в качестве параметра управления.
12. Устройство по п. 8, отличающееся тем, что устройство перемещения содержит цевочную рейку (5) или зубчатую рейку и по меньшей мере одну шестерню (6), входящую в зацепление с рейкой, причем частота вращения шестерни является изменяемой в качестве параметра управления.
13. Устройство по п. 2, отличающееся тем, что барабанный привод и/или зубчатый привод содержат предпочтительно плавно регулируемые приводы.
14. Устройство по любому из пп. 3-6, 9, 11, 12, отличающееся тем, что инструментальный барабан (10) имеет барабанный привод (21), который отделен от зубчатого привода (17) для инструментальных валов (9), при этом управляющее устройство (50) выполнено с возможностью регулирования отношения частот вращения в качестве дополнительного параметра управления, при этом барабанный привод и/или зубчатый привод содержат предпочтительно плавно регулируемые приводы.
15. Устройство по п. 7, отличающееся тем, что инструментальный барабан (10) имеет барабанный привод (21), который отделен от зубчатого привода (17) для инструментальных валов (9), при этом управляющее устройство (50) выполнено с возможностью регулирования отношения частот вращения в качестве дополнительного параметра управления, при этом барабанный привод и/или зубчатый привод содержат предпочтительно плавно регулируемые приводы.
16. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что частота вращения и/или относительная скорость являются регулируемыми таким образом, что гармонические колебания достигают требуемого значения по отношению к основному колебанию.
17. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что субгармонические колебания определяются из анализа колебаний или частота вращения и/или относительная скорость являются регулируемыми таким образом, чтобы субгармонические колебания принимали заданное значение по отношению к основному колебанию.
18. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что субгармонические колебания являются определяемыми из анализа колебаний, при этом управляющее устройство снабжено модулем контроллера, который выполнен с возможностью регулирования скорости устройства перемещения или глубины проникновения в материал таким образом, что субгармонические колебания достигают заданного значения.
19. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что измерительный датчик (30) для измерения естественных поступательных колебаний содержит датчик ускорений, в частности пространственный датчик ускорений.
20. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что измерительный датчик (32; 34) для определения угловых колебаний является абсолютным энкодером для непосредственных измерений, предназначенным для инструментального барабана, в частности индуктивным датчиком и/или датчиком Холла.
21. Устройство по любому из пп. 1-6, 9, 11-13, 15, отличающееся тем, что измерительный датчик для определения угловых колебаний содержит датчики момента, предназначенные для инструментальных валов.
22. Способ механической обработки материалов фрезерованием и/или бурением, в частности для удаления скальных пород, минералов или угля с помощью устройства, содержащего инструментальный барабан (10), который установлен на несущем устройстве (2) для барабана с возможностью вращения вокруг оси (Т) барабана и в котором установлено несколько инструментальных валов (9), приводимых во вращение приводным элементом общего зубчатого привода, при этом на концах инструментальных валов, выступающих из инструментального барабана (10), установлены механообрабатывающие инструменты (7), причем инструментальные валы (9) имеют возможность вращения с первой частотой вращения, а инструментальный барабан (10) имеет возможность вращения со второй частотой вращения, при этом несущее устройство (2) для инструмента имеет возможность перемещения относительно материала, подлежащего механической обработке, с помощью устройства для перемещения, причем скорость перемещения несущего устройства для инструмента относительно материала и частоту вращения инструментального барабана и/или инструментальных валов изменяют с помощью управляющего устройства (50), отличающийся тем, что с помощью измерительного датчика (30) измеряют поступательные колебания устройства и/или с помощью измерительного датчика (32; 34) определяют угловые колебания инструментального барабана (10), причем спектр колебаний определяют с помощью анализа колебаний определенных колебаний, при этом частоту вращения и/или относительную скорость регулируют как функцию колебаний, определенных с помощью модуля анализа.
23. Способ по п. 22, отличающийся тем, что частоту вращения и/или относительную скорость регулируют таким образом, что гармонические колебания достигают требуемого значения по отношению к основному колебанию.
24. Способ по любому из пп. 22 или 23, отличающийся тем, что нелинейные субгармонические колебания определяют из анализа колебаний или спектра колебаний, при этом частоту вращения и/или относительную скорость регулируют таким образом, что субгармонические колебания достигают требуемого значения по отношению к основному колебанию.
25. Способ по любому из пп. 22 или 23, отличающийся тем, что субгармонические колебания определяют из анализа колебаний и/или спектра колебаний, при этом управляющее устройство снабжено модулем контроллера, с помощью которого скорость устройства перемещения или глубину проникновения в материал регулируют таким образом, что уменьшаются субгармонические колебания.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 4143552 A, 13.03.1979 | |||
| US 4228508 A, 14.10.1980 | |||
| US 4741577 A, 03.05.1988 | |||
| US 6666521 B1, 23.12.2003 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

