Изобретение относится к машиностроению, а именно к оборудованию для перемещения изделий и грузов с позиции на позицию и может быть использовано при создании роботов, тактовых столов, конвейеров периодического действия и т.д.
Известны модули, в которых перемещение рабочих органов осуществляется в помощью гидравлических, пневматических шаговых электрических двигателей или с использованием различных шаговых механизмов (мальтийских, кулачковых и пр.). Основным недостатком таких модулей является низкая надежность при работе на высоком уровне производительности, когда кинетическая энергия подвижных звеньев
вызывает ударное взаимодействие элементов конструкции и их повышенную вибрацию.
Наиболее близким по технической сущности к изобретению является модуль робота, содержащий стойку с размещенным на ней выходным звеном, связанным с установленным на стойке выходным валом, датчик положения выходного вала, привод, системууправления, аккумулятор механической энергии, выполненный в виде размещенного на стойке кривошипного вала с управляемым фиксатором его положения, причем этот вал подпружинен по углу поворота относительно стойки и кинематически связан через дополнительно введенную упN го
ю
00
о о
ровляемую сцепную муфту с выходным валом.
Использование аккумулятора механической энергии позволяет значительно снизить влияние кинетической энергии подвижных звеньев на динамику и вибрацию при работе модуля.
Недостатком этой конструкции является то, что разгон осуществляется только на половине оборота вала, причем в начальный момент поворота выходного вала, когда усилие пружины максимально, плечо его действия минимально, и поэтому разгон осуществляется относительно медленно. Поэтому Для достижения быстроты поворота выходного вала в этой конструкции необходимо использовать пружину повышенной жесткости, что приводит к усилению нагру- женности звеньев модуля. Высокий уровень нагрузок и их циклический характер являются источником динамики и колебаний при работе с большой производительностью, что ведет к снижению надежности модуля. Кроме того, сложность обеспечения неподвижности кривошипного вала при его фиксации в момент попадания фиксатора в отверстие также является причиной снижения надежности модуля.
Цель изобретения - повышение надежности работы модуля робота.
Указанная цель достигается тем, что модуль робота, содержащий стойку с размещенным на ней выходным звеном, связанным с установленным на стойке выходным валом, аккумулятор механической энергии, привод, датчик углового положения выходного вала и систему управления снабжен укрепленным на стойке дополнительным валом, кинематически связанным с выходным валом таким образом, что оба вала вращаются в одном направлении, аккумулятор механической энергии выполнен в виде двух укрепленных на валах с возможностью вращения обгонных муфт с взаимно противоположным направлением свободного хода, наружные обоймы которых подпружинены друг к другу по углу поворота и имеют жестко закрепленные на них зацепляющиеся между собой зубчатые шестерни, на валах установлены две управляемые сцепные муфты с возможностью взаимодействия с обгонными муфтами, а система управления электрически связана с датчиком углового положения, приводом и сцепными муфтами.
Наличие в конструкции установленных на подшипниках двух обгонных муфт, соединенных с валами посредством управляемых сцепных муфт, позволяет надежно
фиксировать выходное звено практически на любом уровне производительности.
Выполнение аккумулятора механической энергии в виде подпружиненных друг
к другу по углу поворота наружных обойм обгонных муфт приводит к замыканию нагрузок на валы и уменьшению их действия на стойку, что ведет к снижению ее колебаний и тем самым повышению надежности
0 оборудования.
Кроме того, в отличие от прототипа, где разгон вала может осуществляться только на половине его оборота, предлагаемая конструкция позволяет разгонять вал в продол5 жении поворота его на несколько оборотов и тем самым в ней возможно установление пружины с много меньшей жесткостью, что дает снижение нагруженности звеньев модуля и повышение надежности устройства.
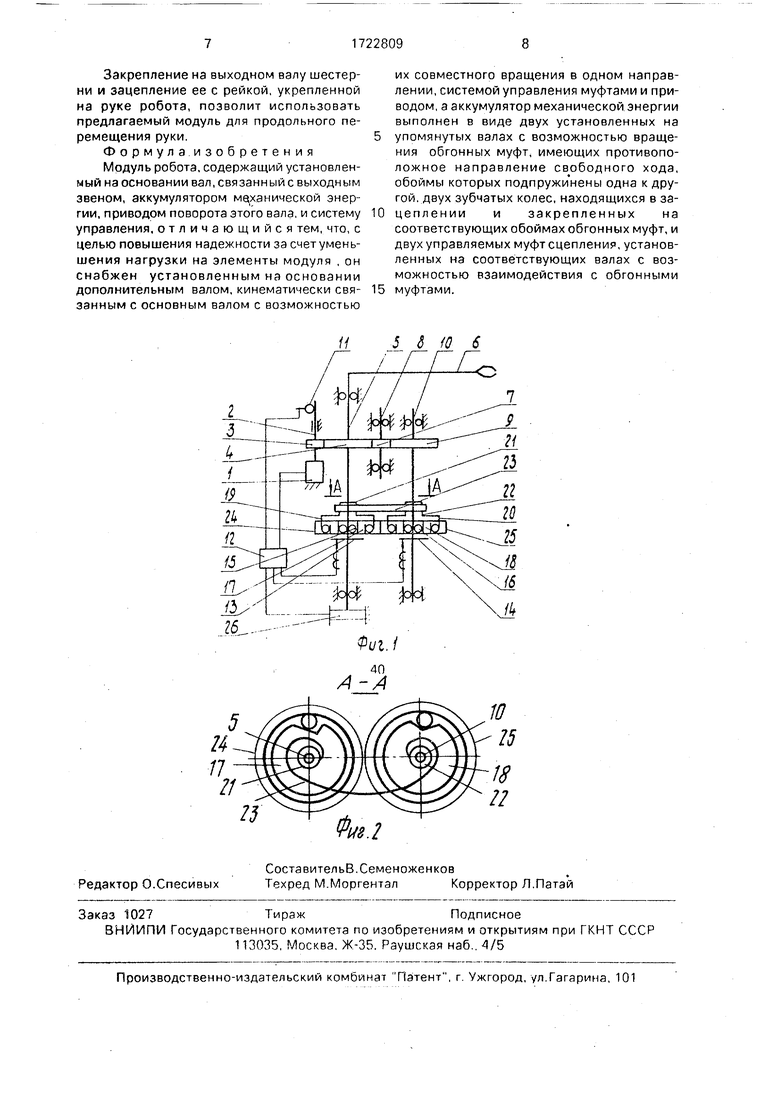
0На фиг. 1 изображена схема модуля; на
фиг. 2 - схема аккумулятора механической энергии.
Модуль робота содержит стойку (не показана) с укрепленным на ней приводом 1,
5 на валу-2 которого укреплена шестерня 3, зацепляющаяся с шестерней 4, размещенной на установленном на стойке выходном валу 5, на котором закреплено выходное звено - рука 6 робота. Шестерня 4 выходно0 го вала через реверсную ш.естерню 7, установленную на оси 8, связана с шестерней 9, укрепленной на установленном на стойке дополнительном валу 10. Модуль включает
5 укрепленный на валу 2 датчик 11 углового положения и блок 12 управления, которые электрически связаны между собой, а также с приводом 1 и установленными на валах 5 и 10 управляемыми муфтами 13 и 14, акку0 муляторы механической энергии, который содержит также установленные на валах 5 и 10 на подшипниках 15 и 16 обгонные муфты 17 и 18, к наружным обоймам 19 и 20 которых жестко прикреплены барабаны 21, 22,
5 подпружиненные друг к другу с помощью пружины 23, а также зацепляющиеся между собой зубчатые шестерни 24, 25. Модуль включает также поворотный заводной привод, выполненный в виде поворотного пнев0 модвигателя 26, укрепленного на выходном валу 5 и электрически связанного с блоком 12 управления. Функции поворотного заводного привода могут выполнять электрический, гидравлический.и другие виды
5 приводов.
Модуль работает следующим образом, В обесточенном состоянии управляемые сцепные муфты 13 и 14 соединяют обгонные муфты 17 и 18с валами 5 и 10. Для приведения модуля в исходное положение по сигналу блока управления 12 включается
пневмодвигатель 26 и поворачивает выходной вал почасовой стрелке (фиг. 2). При этом обгонная муфта 17 вращает зубчатое колесо 24 и барабан 21 по часовой стрелке, а наружная обойма 20 обгонной муфты 18, связанная с обоймой 19 через зубчатые шестерни 24, 25, вращается вместе с барабаном 22 против часовой стрелки. При этом обгонная муфта 18 не препятствует повороту вала 10, связанного с валом 5 зубчатыми шестернями 4, 7, 9 по часовой стрелке. Таким образом, барабаны 21 и 22, укрепленные на обоймах 19, 20, вращаются во взаимно противоположных направлениях и пружина 23 заводится, накапливая потенциальную энергию. При повороте на расчетный угол по команде блока 12 управления пневмодвигатель 26 выключается таким образом, чтобы он в дальнейшем не оказывал сопротивления повороту вала. Крутящие моменты, создаваемые пружиной 23 на барабанах 21 и 22, и следовательно, на обоймах 19 и 20, стремятся повернуть через зубчатые колеса 24, 25 валы 5 и 10 во взаимно противоположных направлениях, однако зубчатое зацепление шестерен 4, 7 и 9 препятствует этому повороту. Поэтому звенья модуля находятся в неподвижном состоянии,
Для осуществления поворота выходного вала 5, а вместе с ним и руки 6. например, по часовой стрелке (рис. 2) по сигналу блока управления 12 включается привод 1 и муфта 13, которая отсоединяет обгонную муфту 17 от вала 5, и пружина 23 начинает поворачивать барабан 22 по часовой стрелке, а барабан 21 против часовой стрел-ки. При этом вместе с барабаном 22 по часовой стрелке будут поворачиваться муфты 18. 14, валы 10 и 5. Так как муфта 17 находится на валу 5 на подшипниках 15, то муфтэ 17 свободно, не препятствуя валу 5, вращается в противоположном ему направлении. В процессе поворота валов 5 и 10, а вместе с ними и руки робота 6 потенциальная энергия пружины. 23 переходит в кинетическую энергию подвижных звеньев, разгон которых закончится, когда пружина 23 спустится, и обоймы 19 и 20 остановятся. Далее движение будет продолжаться по инерции, когда привод 1 способствует преодолению лишь сил трения. При повороте руки б на определенный угол для остановки выходного вала 5 по сигналу датчика 11 углового положения блок 12 подает команду на выключение муфты 13, происходит присоединение обгонной муфты 17 к валу 5, который, вращаясь по часовой стрелке, поворачивает в этом же направлении и муфту 17 вместе с барабаном 21.
Наружная обойма 20 муфты 18 через зубчатое зацепление 24, 25 будет вращаться против часовой стрелки, при этом муфта 18 не будет препятствовать повороту вала 10 5 по часовой стрелке. Барабан 22 вращается вместе с обоймой 20 против часовой стрелки и пружина 23 заводится. Скорость вращения звеньев уменьшается, w происходит переход кинетической энергии подвижных
0 звеньев в потенциальную энергию заводной пружины 23. При остановке вала 5, а вместе с ним вала 10, руки 6 и других подвижных звеньев привод 1 выключается. Начинается выстой, во время которого
5 все звенья находятся в неподвижном состоянии, так как заведенная пружина 23 стремится повернуть валы 5 и 10 через зубчатые шестерни 4, 7, 9 в одном направлении, а через зубчатые шестерни 24 и 25 во взаимно
0 противоположном направлении.
Для поворота выходного вала 5 в том же направлении все повторяется аналогичным образом, для поворота вала 5 в обратном направлении включается муфта 14, отсоеди5 няя обгонную муфту 18 от вала 10, происходит поворот вала 5 против часовой стрелки. Для остановки вала 5 муфта 14 выключается. Угловая координата позиционирования регулируется с помощью задержки или ус0 корения времени-выключения муфты сцепления.
Так как в аккумуляторе прототипа кривошипный вал подпружинен к стойке, а в предлагаемом техническом решении на5 ружные обоймы обгонных муфт подпружинены одна к другой и, кроме того, в предлагаемом устройстве возможно использование не только пружин растяжения или сжатия, но и спиральных заводных пру0 жин, имеющих более пологие характеристики с рабочим ходом в несколько оборотов, это обеспечивает снижение уровня нагрузки, имеющей циклический характер, а следовательно, уменьшение динамики и
5 вибрации в работе модуля и повышение его надежности.
Устранение из конструкции модуля робота устройства, жестко фиксирующего вы0 ходной вал относительно стойки с помощью управляемого пальца, и замена его конструкцией, обеспечивающей свободное вращение валов до остановки с последующей автоматической надежной фиксацией с по5 мощью двух обгонных муфт с взаимно противоположным направлением свободного хода, в значительной степени способствует уменьшению рывков и ударов в работе робота.
Закрепление на выходном валу шестерни и зацепление ее с рейкой, укрепленной на руке робота, позволит использовать предлагаемый модуль для продольного перемещения руки.
Формула.изобретения Модуль робота, содержащий установленный на основании вал, связанный с выходным звеном, аккумулятором механической энергии, приводом поворота этого вала, и систему управления, отличающийся тем, что, с целью повышения надежности за счет уменьшения нагрузки на элементы модуля , он снабжен установленным на основании дополнительным валом, кинематически связанным с основным валом с возможностью
их совместного вращения в одном направлении, системой управления муфтами и приводом, а аккумулятор механической энергии выполнен в виде двух установленных на
упомянутых валах с возможностью вращения обгонных муфт, имеющих противоположное направление свободного хода, обоймы которых подпружинены одна к другой, двух зубчатых колес, находящихся в за0 цеплении и закрепленных на соответствующих обоймах обгонных муфт, и двух управляемых муфт сцепления, установленных на соответствующих валах с возможностью взаимодействия с обгонными
5 муфтами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Поворотное устройство | 1991 |
|
SU1810683A1 |
| УСТРОЙСТВО ПЕРИОДИЧЕСКОГО ПЕРЕМЕЩЕНИЯ | 2003 |
|
RU2254975C1 |
| РЕКУПЕРАТОР АВТОМОБИЛЯ | 2007 |
|
RU2346196C1 |
| РЕКУПЕРАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2117836C1 |
| РЕКУПЕРАТОР ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2002 |
|
RU2222737C2 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| Механизм сцепления | 1980 |
|
SU985507A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ И ГЕНЕРАТОРОМ, ВЫДАЮЩИМ ТОК ПОСТОЯННОЙ ЧАСТОТЫ ПРИ ВРАЩЕНИИ РОТОРА ГЕНЕРАТОРА ОТ ИНЕРЦИИ МАХОВИКА | 2000 |
|
RU2179656C1 |
| ЧАСЫ И ЧАСОВОЙ МЕХАНИЗМ С ТЕРМОЧУВСТВИТЕЛЬНЫМ ПРИВОДОМ | 2014 |
|
RU2577696C1 |
Изобретение относится к машиностроению, а именно к оборудованию для перемещения изделий и грузов с позиции на позицию, и может быть использовано при создании роботов, тактовых столов, конвейеров периодического действия и т.д. Сущность изобретения: модуль снабжен дополнительным валом, кинематически связанным с выходным валом таким образом. что оба вала вращаются в одном направлении, а аккумулятор механической энергии выполнен в виде двух укрепленных на валах с возможностью вращения обгонных муфт с взаимно противоположным направлением свободного хода, обоймы которых, подпружинены друг к другу и имеют жестко закрепленные на них зацепляющиеся между собой зубчатые колеса, и двух управляемых сцепных муфт, взаимодействующих с обгонными муфтами. Для разгона руки робота 6 одна из сцепных муфт, например 13, отсоединяет обгонную муфту 17 от вала 5 и потенциальная энергия пружины 23 аккумулятора переходит в энергию движения выходных звеньев модуля. При торможении по сигналу блока 12 управления муфта 13 присоединяет муфту 17 к валу 5 и кинетическая энергия руки 6 и других подвижных звеньев переходит в потенциальную энергию пружины 23. 2 ил. (Л С
| Модуль промышленного робота | 1986 |
|
SU1399110A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
