Изобретение относится к области механических передач, содержащих шарики и ролики, размещенные между винтом и гайкой, и детали, необходимые для применения этих элементов.
Известно устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи (Крайнев А.Ф. Детали машин. Словарь-справочник. - М.: Машиностроение, 1992. - С. 203, схемы б, в), в состав которого входят винт и несколько роликов, причем оси винта и роликов параллельны. Рабочие поверхности роликов выполнены в виде кольцевых выступов, имеющих профиль, подобный профилю резьбы, и расположенных с шагом, равным шагу резьбы винта. Ролики размещены на водиле (сепараторе) посредством радиально-упорных подшипников.
Недостатками данного устройства являются высокие контактные напряжения между резьбовыми выступами винта и роликов, ограничивающие его нагрузочную способность, а также необходимость в радиально-упорных подшипниках. Повышение осевого усилия требует увеличения размеров подшипников и связанного с ним увеличения размеров и массы устройства.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи (Пат. РФ 2399815, МПК F16H 25/22. Т.С. Фефелова, В.М. Таугер. Устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи. - Опубл. 20.09.2010), содержащее винт с резьбой и ролик с рабочей поверхностью в виде ряда наружных кольцевых выступов. Ролик установлен в ползуне посредством радиально-упорных подшипников. Резьба на винте и профили кольцевых выступов на рабочей поверхности ролика выполнены прямоугольными. Оси винта и ролика скрещиваются под углом, величина которого зависит от числа заходов и диаметра резьбы винта.
Недостатком данного устройства является необходимость в радиально-упорных подшипниках, обеспечивающих передачу осевого усилия от ролика к ползуну. Реализация большого осевого усилия требует увеличения размеров подшипников и связанного с ним роста размеров и массы устройства.
Цель изобретения - уменьшение размеров и массы устройства.
Указанная цель достигается тем, что устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи, содержащее винт и несколько роликов с кольцевыми выступами, снабжено гайкой, а резьба на винте и гайке и профили кольцевых выступов выполнены прямоугольными.
Сущность изобретения заключается в том, что устройство содержит не менее двух роликов с кольцевыми выступами прямоугольного профиля, расположенных по окружности винта на равном расстоянии друг от друга, дополнительно снабжено гайкой с прямоугольной резьбой с шагом и углом подъема, равными шагу и углу подъема резьбы винта, установленной соосно с винтом с возможностью поступательного перемещения в неподвижной направляющей, при этом кольцевые выступы роликов введены во впадины резьбы винта и гайки, а числа заходов резьбы винта и гайки либо оба четные, либо оба нечетные, длина резьбы винта и гайки
lp≥0,5(lmax+kp),
где lр - длина резьбы винта и гайки; lmax - максимальное перемещение гайки относительно направляющей; k - число кольцевых выступов ролика; p - шаг резьбы винта и гайки.
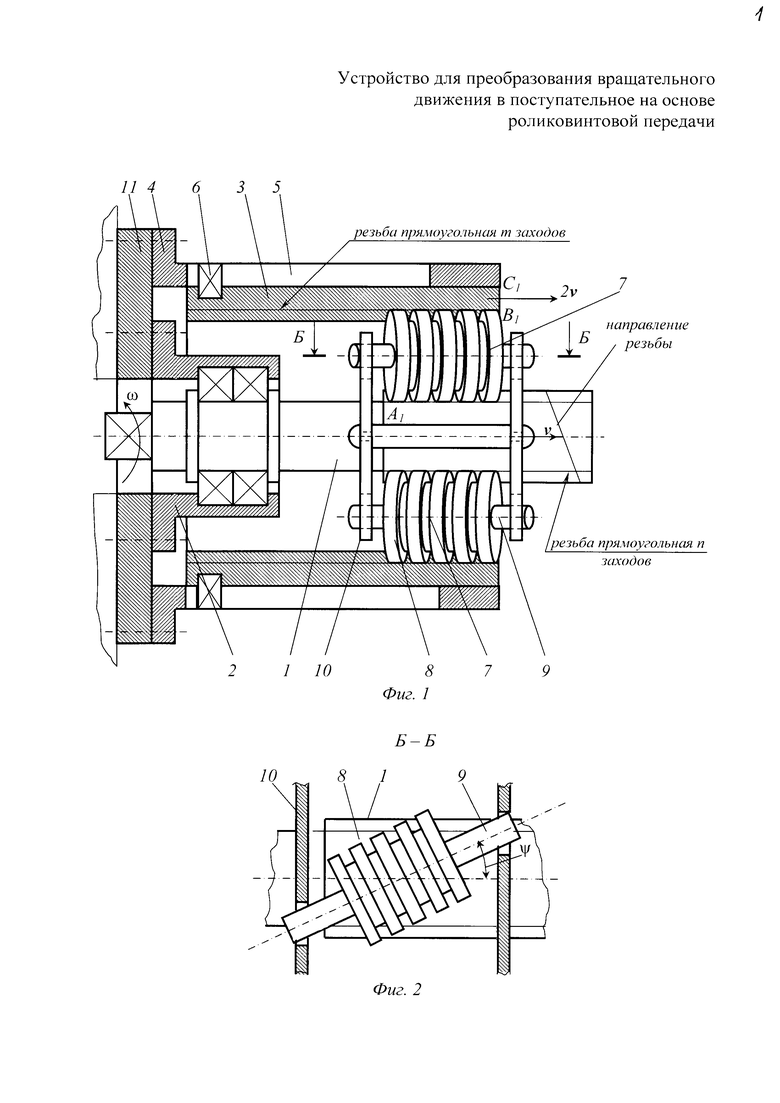
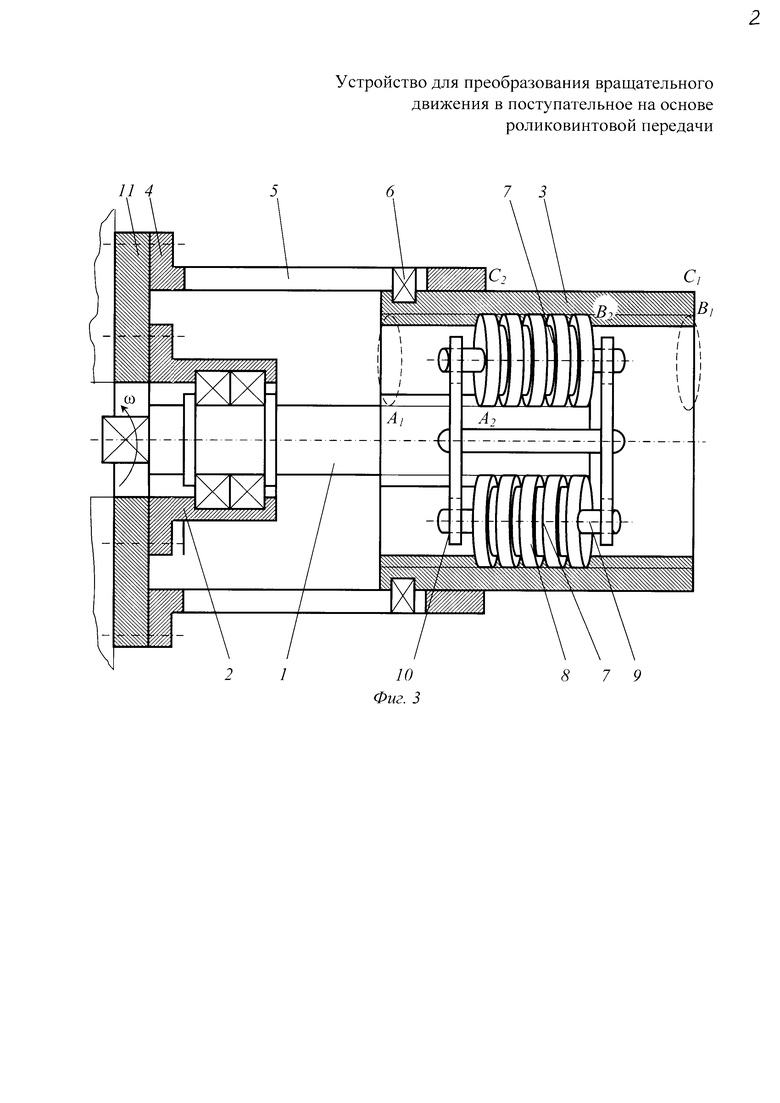
На фиг. 1 представлена схема предлагаемого устройства с гайкой в исходном положении, на фиг. 2 - разрез Б-Б фиг. 1, на фиг. 3 - схема предлагаемого устройства с гайкой в конечном положении.
Ролики 7 (фиг. 1) имеют наружные кольцевые выступы 8 прямоугольного профиля и хвостовики 9. Кольцевые выступы 8 введены во впадины прямоугольной резьбы винта 1 и соосной с винтом 1 гайки 3, причем резьба винта 1 и резьба гайки 3 имеют угол подъема витка, равный ψ. Принято правое направление резьбы винта. Оси каждого ролика 7 и винта 1 скрещиваются под углом ψ (фиг. 2). Винт 1 установлен в опоре вращения 2, закрепленной на неподвижном основании 11.
Количество роликов 7 в устройстве должно быть не менее двух (в схеме фиг. 1 оно принято равным двум), что позволяет за счет равномерного распределения роликов по окружности разгрузить винт от изгибающего момента. Для использования в устройстве двух и более роликов 7 необходимо, чтобы числа заходов резьбы винта 1 n и гайки 3 m были либо оба нечетные, либо оба четные.
В схеме на фиг. 1 ролики 7 расположены диаметрально относительно винта, их взаимное расположение фиксируется сепаратором 10, в отверстия которого входят хвостовики 9 (фиг. 2).
Гайка 3 снабжена двумя кулачками 6, размещенными в ответных продольных пазах 5 направляющей 4 (фиг. 1), что обеспечивает продольное перемещение с предотвращением поворота гайки 3 относительно направляющей 4. Направляющая 4 закреплена на основании 11.
На фиг. 1 исходное положение гайки 3 относительно направляющей 4 обозначено буквой C1, при этом ролик 7 занимает положения относительно винта 1 и гайки 3, обозначенные буквами A1 и B1 соответственно.
Устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи работает следующим образом.
При вращении винта 1 против часовой стрелки (фиг. 1) ролики 7 вовлекаются во вращение по часовой стрелке силами трения на боковых поверхностях контактирующих профилей резьбы винта 1 и кольцевых выступов 8.
Кольцевые выступы 8 контактируют также с профилями резьбы гайки 3. Гайка 3 зафиксирована от вращения относительно направляющей 4, поэтому ролики 7 вместе с сепаратором 10 совершают планетарное движение относительно винта 1.
Передаточное отношение от винта 1 к сепаратору 10 при перекатывании без скольжения ролика 7 по винту 1 и гайке 3 определяется аналогично передаточному отношению одноступенчатой планетарной передачи внутреннего зацепления (Крайнев А.Ф. Детали машин. Словарь-справочник. - М.: Машиностроение, 1992. - С. 206, схема а), по формуле:
 ,
,
где ω1, ω10 - угловая скорость винта 1 и сепаратора 10 соответственно; d1, d3 - средний диаметр резьбы винта и гайки соответственно.
Следовательно, разность угловых скоростей винта 1 и сепаратора 10 равна
 .
.
Скорость v перемещения сепаратора 10 вместе с роликами 7 вдоль винта 1 (фиг. 1)
 ,
,
скорость перемещения гайки 3 относительно сепаратора 10 с роликами 7 также равна
 .
.
Поскольку направление резьбы винта 1 и гайки 3 одно и то же, то направление скорости поступательного перемещения гайки 3 относительно сепаратора 10 совпадает с направлением скорости перемещения сепаратора 10 вдоль винта 1, а величина скорости гайки 3 относительно направляющей 4 равна 2v. Перемещение роликов 7 по винту 1 от начальной позиции A1 в конечную A2 на расстояние A1A2 (фиг. 3) приводит к перемещению гайки 3 относительно роликов 7 от начальной позиции B1 в конечную B2 на расстояние В1В2, равное A1A2, и выдвижению гайки 3 из направляющей 4 от начальной позиции C1 в конечную C2 на расстояние C1C2, равное 2A1A2.
Пусть длина резьбы винта 1 и гайки 3 равна lр. Тогда возможные перемещения l роликов 7 вдоль винта 1 и перемещение гайки 3 относительно роликов 7 равны
 ,
,
где k - число кольцевых выступов 8 на ролике 7; p - шаг резьбы винта и гайки, а перемещение C1C2 гайки 3 относительно направляющей 4
 .
.
Из последнего выражения следует, что длина резьбы винта 1 и гайки 3 должна соответствовать соотношению
 ,
,
где lmax - максимальное перемещение гайки 3 относительно направляющей 4.
На фиг. 1 показано направление вращения винта 1 против часовой стрелки. В этом случае принятым направлением резьбы - правым - обусловливается перемещение сепаратора 10 с роликами 7, а также гайки 3 вправо.
Кольцевые выступы 8 своими наружными поверхностями контактируют с поверхностями впадин резьбы гайки 3 и винта 1. Положение роликов 7 относительно винта 1 и гайки 3 ограничено в осевом направлении боковыми поверхностями выступов, а в радиальном направлении - поверхностями впадин резьбы винта 1 и гайки 3. Ни осевое смещение, ни поворот роликов 7 под действием сил сопротивления перемещению гайки 3 невозможны, поэтому нет необходимости устанавливать ролики в радиально-упорных подшипниках.
Таким образом, предлагаемое техническое решение позволяет путем установки роликов между винтом и гайкой исключить из устройства радиально-упорные подшипники роликов и уменьшить за счет этого размеры и массу устройства, а также увеличить поступательное перемещения гайки относительно направляющей в два раза по сравнению с перемещением роликов вдоль винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ НА ОСНОВЕ РОЛИКОВИНТОВОЙ ПЕРЕДАЧИ | 2009 |
|
RU2399815C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2006 |
|
RU2310785C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ (ВАРИАНТЫ) | 2008 |
|
RU2374527C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВИНТ-ГАЙКА КАЧЕНИЯ | 1991 |
|
RU2039898C1 |
| Шарикоподшипниковая гайка (ШПГ) | 2023 |
|
RU2812815C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2015 |
|
RU2610747C1 |
| ВИНТОВАЯ ПЕРЕДАЧА ПАРАЛЛЕЛЬНОЙ СХЕМЫ | 2015 |
|
RU2619487C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2009 |
|
RU2392517C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 2013 |
|
RU2544033C1 |
Изобретение относится к области машиностроения, а более конкретно к механическим передачам. Устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи, содержащее винт и несколько роликов с кольцевыми выступами, снабжено гайкой, а резьба на винте и гайке и профили кольцевых выступов выполнены прямоугольными. Устройство содержит не менее двух роликов с кольцевыми выступами прямоугольного профиля, расположенных по окружности винта на равном расстоянии друг от друга. Устройство снабжено гайкой с прямоугольной резьбой с шагом и углом подъема, равными шагу и углу подъема резьбы винта, установленной соосно с винтом с возможностью поступательного перемещения в неподвижной направляющей. Кольцевые выступы роликов введены во впадины резьбы винта и гайки, а числа заходов резьбы винта и гайки либо оба четные, либо оба нечетные. Достигается уменьшение габаритов и массы. 3 ил.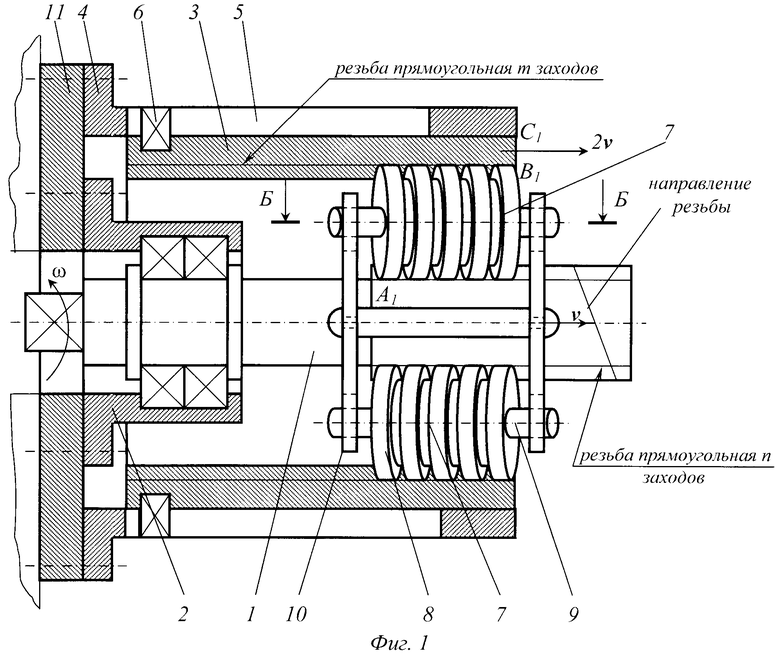
Устройство для преобразования вращательного движения в поступательное на основе роликовинтовой передачи, содержащее смонтированный в опорах вращения винт, ролик с рабочей поверхностью в виде наружных кольцевых выступов, установленный в ползуне посредством радиально-упорных подшипников с возможностью перемещения в направляющей параллельно оси винта, резьба на винте и профили кольцевых выступов ролика выполнены прямоугольными, а оси винта и ролика скрещиваются под углом, величина которого зависит от числа заходов и диаметра резьбы винта, отличающееся тем, что устройство содержит не менее двух роликов, расположенных по окружности винта на равном расстоянии друг от друга, дополнительно снабжено гайкой с прямоугольной резьбой с шагом и углом подъема, равными шагу и углу подъема резьбы винта, установленной соосно с винтом с возможностью поступательного перемещения в неподвижной направляющей, при этом кольцевые выступы роликов введены во впадины резьбы винта и гайки, а числа заходов резьбы винта и гайки либо оба четные, либо оба нечетные, и длина резьбы винта и гайки
lp≥0,5(lmax+kp),
где lp - длина резьбы винта и гайки;
lmax - максимальное перемещение гайки относительно направляющей;
k - число кольцевых выступов ролика;
p - шаг резьбы винта и гайки.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ НА ОСНОВЕ РОЛИКОВИНТОВОЙ ПЕРЕДАЧИ | 2009 |
|
RU2399815C1 |
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА С МОДИФИЦИРОВАННОЙ РЕЗЬБОЙ ЕЕ ДЕТАЛЕЙ | 2002 |
|
RU2204069C1 |
| US 20080314179 A1, 25.12.2008 | |||
| Шариковый винтовой механизм | 1987 |
|
SU1439339A1 |
| Шарикоподшипниковый винтовой механизм | 1986 |
|
SU1357637A1 |

