Изобретение относится к машиностроению, а именно к винтовым переда-: чам, и может быть применено в прецизионном станкостроении, а также в усройствах, где требуется преобразование вращательного движения в высокоточное поступательное,
Цель изобретения ;- повьппение точности и нагрузочной способности передачи за счет непосредственного контакта шариков с винтовой канавкой . винта при большем угле захвата.
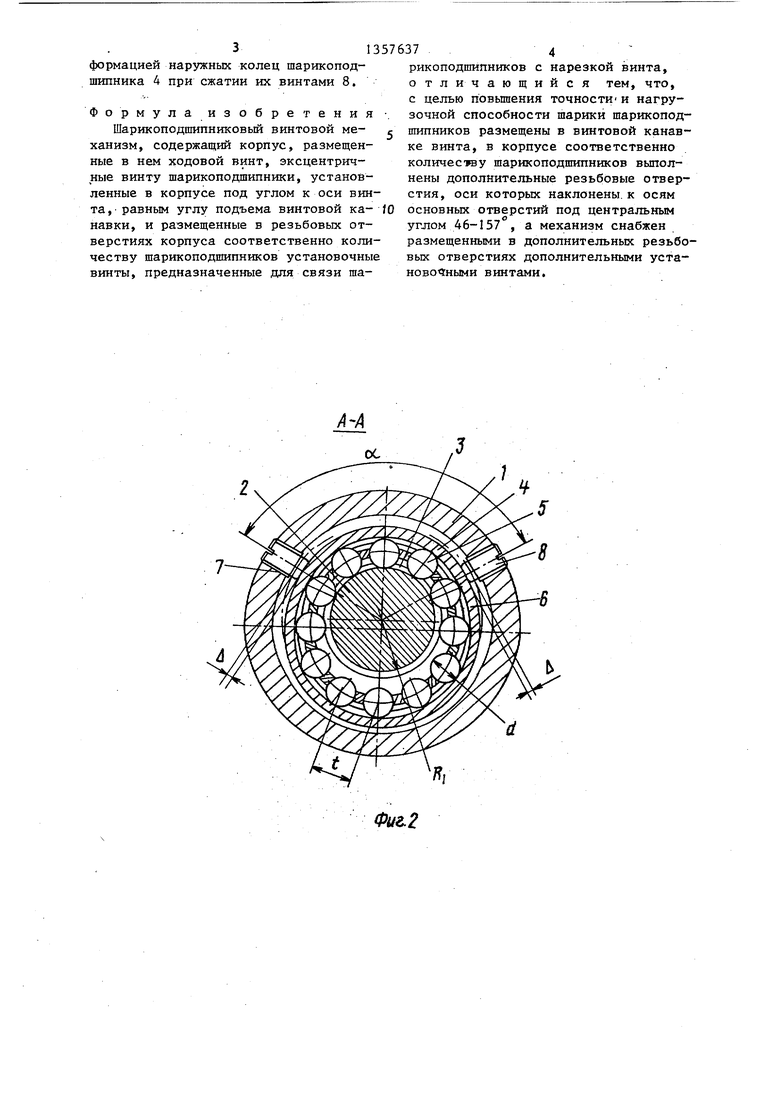
На фиг.1 показана конструктивная схеяа механизма; на фиг.2 - сечение А-А на фиг.1; на фиг.З - схема установки шарикоподшипников вдоль оси винта.
Механизм содержит корпус 1, размещенный в нем винт 2 с нарезанной на нем винтовой канавкой 3 и шарикоподшипники 4, шарики 5 которых размещены в сепараторах 6 и предназначены для непосредственного взаимодействия с винтовой канавкой 3 винта 2. Шарикоподшипники 4 устанавливаются с разнонаправленным эксцентриситетом относительно винта 2 и под углом к его оси, равным углу подъема винтог вой канавки 3.
В корпусе 1 выполнены резьбовые отверстия 7, оси которых образуют между собой центральный угол oi. . В зависимости от количества шариков 5 в шарикоподшипншсе 4 угол об имеет следующие значения: для девяти шариков 46-120 , а для шестнадцати шариков 80-157°.
В отверстиях 7 размещены установочные винты 8, обеспечивающие эксцентриситет шарикоподшипников 4 относительно винта 3 и увеличения : угла tji охвата шариками 5 винта 3 за счет упругой деформации наружных колец шарикоподшипников 4. Для установки шарикоподшипшяков 4 с шагом, равным или пропорциональным шагу винтовой канавки 3, используются проставо ные шайбы 9. Вел:нчина деформации д наружных колец шарикоподшипников 4 90°
для угла 0 муле
определяется по форй 0,3 (R - R, d), .
R, - внутренний радиус винтовой
канавки 3 на винте 2; R,2 - радиус беговой дорожки наружного шарикоподшипника 4 до деформации;
d - диаметр шариков 5. При этом соотношение величин R, R и d -должно удовлетворять условию
5j.±d f) ОС о q TJ ) ;7J... и, у/,
R,
а рекомендуемое
количество шариков (при использова- . НИИ стандартных шарикоподшипников сверхлегкой серии), размещенных в каждом из наружных колец шарикоподшипника 4, составляет 9 - 16 шт и определяется по формуле
15
п
2 rr(R - ) t
0
5
0
5
0
5
где п - количество шариков в каждом наружном кольце шарикоподшип ника 4;
t - щаг размещения шариков 5 в сепараторе 6 (задается конструктивно) .
Предельные значения угла об определяются расчетным путем из зависимостей , . 80
t 360°
о7 5-jloT и - было указано, /iKKj -d//;
зависят от количества шариков 5 в кольце 4.
При сборке установочные.винты 8 завинчивают в направлении к оси винта 2 до тех пор, пока первый шарик 5 не коснется винтовой канавки 3. После этого винты 8 перемещают еще на величину А , пока все шарики 5, находящиеся в секторе угла об , не будут контактировать одновременно и с винтовой канавкой 3, и с беговой дот рожкой наружного кольца шарикоподшипника 4. Такой контакт -определяется резким увеличением момента сопротивления закручиванию на винтах 8, например, с помощью динамдметрическо- го ключа, После перемещения каждой пары винтов 8 на величину Д угол oi охвата шариками 5 винта 2 соответствует расчетному.
Ша рикоподшипниковый винтовой механизм работает следующим образом.
При вращении винта 2 от привода (не показан) шарики 5 обкатьшаются по беговой дорожке наружного кольца шарикоподшипника 4 и в пределах угла et по винтовой канавке 3, что вызьша- ет поступательное перемещение корпуса 1 вдоль оси винта 2. Осевая жесткость механизма обеспечивается упругой деформацией наружных колец шарикоподшипника 4 при сжатии их винтами 8.
Формула изобретения Шарикоподшипниковый винтовой ме- ханизм, содержащий корпус, размещенные в нем ходовой винт, эксцентричные винту шарикоподшипники, установленные в корпусе под углом к оси винта, -равным углу подъема винтовой ка- навки, и размещенные в резьбовых отверстиях корпуса соответственно количеству шарикоподшипников установочные винты, предназначенные для связи шарикоподшипников с нарезкой винта, отличающийся тем, что, с целью повьшгения точности- и нагрузочной способности шарики шарикоподшипников размещены в винтовой канавке винта, в корпусе соответственно количес уву шарикоподшипников выполнены дополнительные резьбовые отверстия, оси которых наклонены, к осям основных отверстий под центральным углом 46-157 , а механизм снабжен размещенными в дополнительных резьбовых отверстиях дополнительными уста- ново з;ными винтами.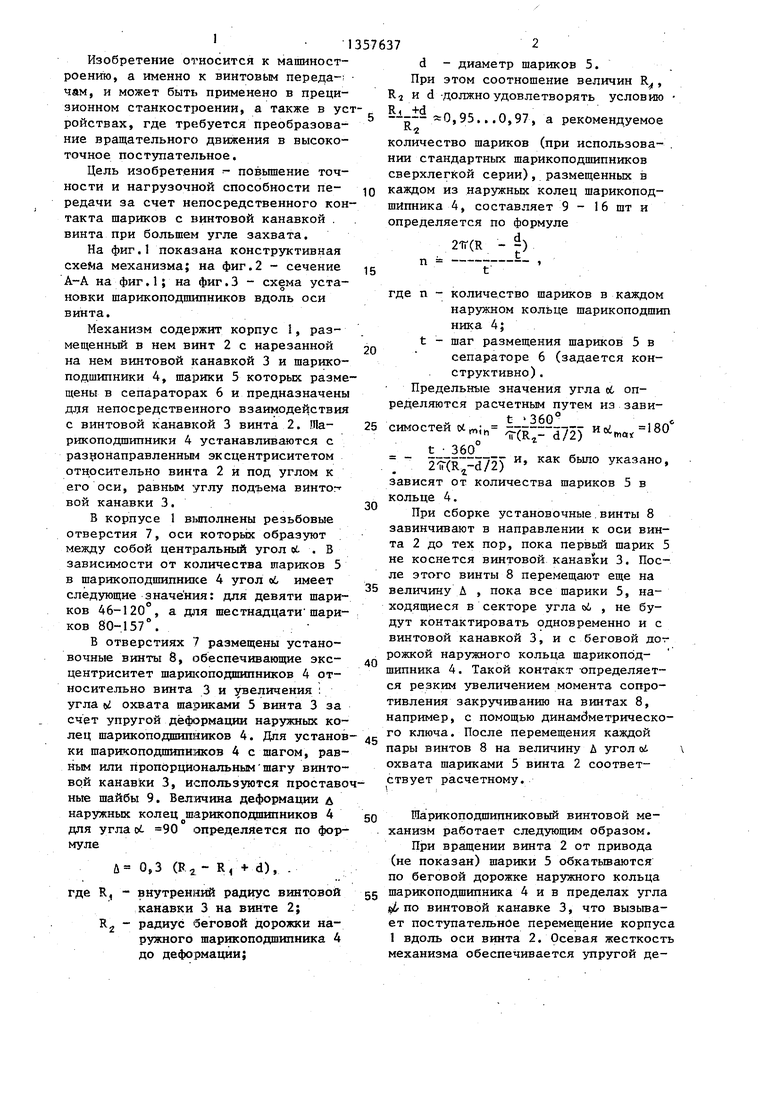
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТДЕЛОЧНО - УПРОЧНЯЮЩЕЙ ОБРАБОТКИ ПЛОСКИХ ПОВЕРХНОСТЕЙ ПОВЕРХНОСТНЫМ ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 2023 |
|
RU2815142C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| Многозаходная винтовая пара с трением качения | 1958 |
|
SU121323A1 |
| Табурет-стремянка и шарикоподшипниковый винтовой механизм для соединения табурета и трапа, развертывания, свертывания трапа и преобразования таким образом табурета в стремянку и обратно | 2023 |
|
RU2818647C1 |
| Клапан-натекатель | 1982 |
|
SU1078168A1 |
| ЦАНГОВЫЙ ПАТРОН, ИМЕЮЩИЙ НАГРУЖЕННЫЙ ПАРАЛЛЕЛЬНО ДЕЙСТВУЮЩЕЙ СИЛОЙ ПОДШИПНИК | 1995 |
|
RU2121907C1 |
| Винтовая передача | 1990 |
|
SU1778408A1 |
| Шарикоподшипник | 1990 |
|
SU1754946A1 |
Изобретение относится к шарикоподшипниковым прецизионньм винтовым передачам. Цель изобретения - повыше/1 Л/ нив точности и нагрузочной способности передачи за счет непосредственного контакта шариков с винтовой канавкой винта при большом угле охвата.Шарикоподшипники 4 без внутренних колец устанавливаются в корпусе I под углом к оси винта 2, равным углу подъема винтовой канавки 3, и с разнонаправленным эксцентриситетом. Подшипники 4 поднимаются установочными винтами 8 в пределах упругой деформации, в результате чего увеличивается угол охвата шариками 5 винта 2. При враш:е- нии винта 2 шарики 5 перекатьшаются по винтовой канавке 3, и корпус I совершает поступательное движение. Зил. (Л со ел О5 оо Фиг.1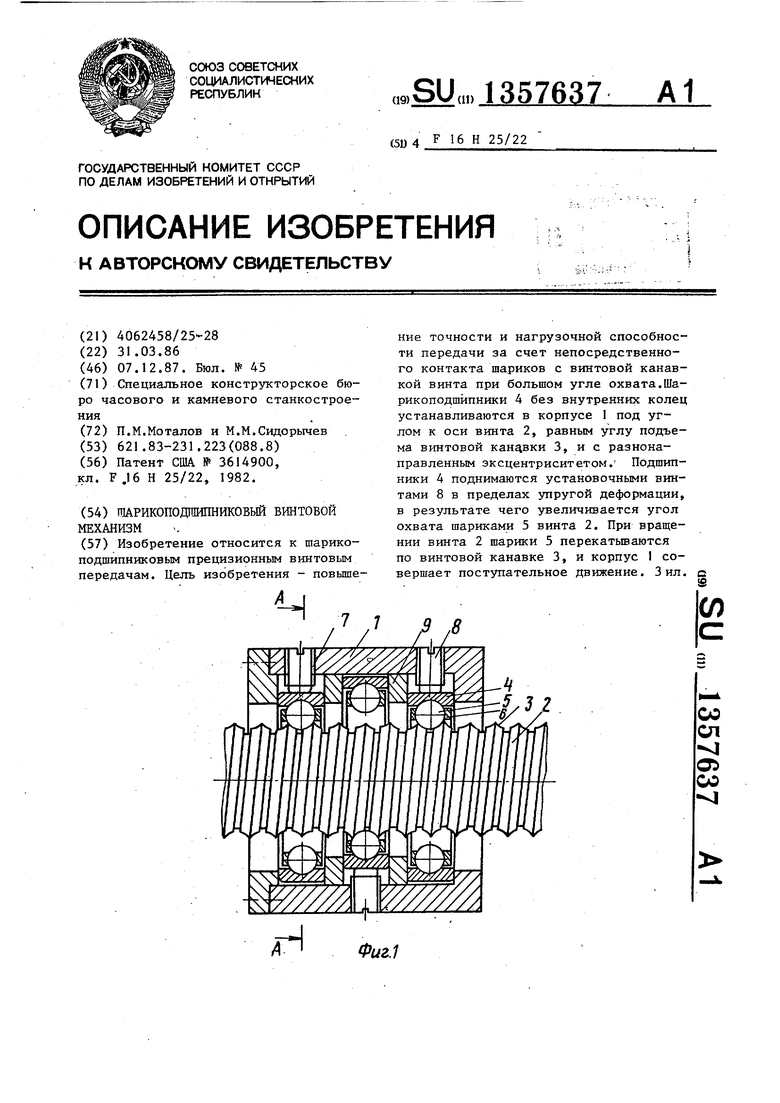
Фиг.2
Фиг.З
| Патент США № 3614900, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
