[010] УРОВЕНЬ ТЕХНИКИ
Транспортные средства, такие как автомобили, повсеместно используются в обычной жизни. Транспортные средства непрерывно совершенствуются в вопросах безопасности водителя и пассажиров. Одной из причин аварий является неспособность поддерживать позицию транспортного средства на проезжей части. Например, если водитель выезжает на бровку или уступ проезжей части, потеря управления транспортным средством может привести к аварии. Различные факторы могут приводить к съезду транспортного средства с дороги, в том числе по причине невнимательности водителя относительно положения транспортного средства и по причине слабой видимости вследствие погоды, которая не позволяет водителю идентифицировать полосу движения и дорожные знаки. Фактически, слабая видимость вследствие сильных осадков может не позволять водителю знать то, где находятся граница проезжей части и уступ дороги. Например, при сильном снегопаде нарисованные линии, размечающие границу покрытия проезжей части и обочины проезжей части, могут быть полностью закрыты осадками, и водитель не имеет визуального указания того, располагается транспортное средство безопасно на дороге, рискованно близко к краю проезжей части или вообще находится полностью вне проезжей части.
[020] Некоторые дорогостоящие транспортные средства оснащаются системой на основе камеры, которая помогает водителю в поддержании транспортного средства на конкретной полосе движения. Камера монтируется в ветровом стекле и используется для того, чтобы наблюдать полосы безопасности. На основе обратной связи из камеры определяется позиция автомобиля относительно краев проезжей части. Если транспортное средство сбивается с полосы движения, предоставляется предостерегающее указание. Эта система является однонаправленной и подвержена снижению эффективности при неблагоприятной погоде (например, при снеге, сильном дожде) вследствие ограничений разрешения камеры.
[030] Поддержание относительной позиции транспортного средства или группы транспортных средств относительно дорожных знаков/дорожной разметки также необходимо для того, чтобы обеспечивать новые интеллектуальные варианты применения грузоперевозок, такие как караваны (или колонны) транспортных средств, в которых группа автомобилей автоматически управляется и "движется" совместно как одна единица, с тем, чтобы улучшать общие условия трафика, повышать безопасность и сокращать заторы. При движении транспортных средств в группах или колоннах транспортные средства объединяются в группы (например, по 20 транспортных средств). Расстояние между транспортными средствами в колонне является сравнительно небольшим, а расстояние между колоннами транспортных средств является сравнительно большим. Режим движения в виде колонны задумывается в качестве способа расширения диапазона пропускных способностей и повышения безопасности, которая может достигаться посредством транспортных средств. Тем не менее, ограничения в способности водителей воспринимать изменения расстояния между транспортными средствами, относительного движения и ускорения и их ограниченная скорость и точность реакции приводит к тому, что пропускная способность полосы движения, в общем, не может превышать 2200 транспортных средств в час при регулировании вручную. Интеллектуальная система требуется для того, чтобы предоставлять более быструю и точную реакцию, чем могут предоставлять водители-люди, и система не подвержена влиянию утомления или других человеческих факторов. Система должна иметь возможность поддерживать группы транспортных средств на полосе движения и поддерживать надлежащее расстояние между транспортными средствами.
[040] Следовательно, требуется система для направления транспортных средств и водителей, которая разрешает, по меньшей мере, недостатки известных систем, описанные выше.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[050] В характерном варианте осуществления, раскрыта система для направления водителя транспортного средства. Система содержит светочувствительный датчик, выполненный с возможностью обнаруживать свет; и процессор, выполненный с возможностью определять позицию транспортного средства на проезжей части на основе характеристики обнаруженного света.
[060] В другом характерном варианте осуществления, раскрыт способ направления водителя транспортного средства. Способ содержит прием света в светочувствительном датчике; определение длины волны света; и на основе характеристики света, определение позиции транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[070] Настоящие идеи лучше всего понимаются из последующего подробного описания, рассматриваемого вместе с прилагаемыми чертежами. Признаки не обязательно нарисованы в масштабе. Если применимо, аналогичные ссылки с номерами означают аналогичные признаки.
[080] Фиг. 1A является концептуальным видом, иллюстрирующим транспортное средство, которое включает в себя компоненты системы в соответствии с характерным вариантом осуществления
[090] Фиг. 1B является концептуальным видом, иллюстрирующим транспортное средство, которое включает в себя компоненты системы в соответствии с характерным вариантом осуществления.
[0100] Фиг. 1C является концептуальным видом, иллюстрирующим транспортное средство, которое включает в себя компоненты системы в соответствии с характерным вариантом осуществления.
[0110] Фиг. 2A иллюстрирует вид сверху направляющего устройства в соответствии с характерным вариантом осуществления.
[0120] Фиг. 2B иллюстрирует вид в перспективе направляющего устройства в соответствии с характерным вариантом осуществления.
[0130] Фиг. 2C иллюстрирует вид в поперечном сечении направляющей секции направляющего устройства в соответствии с характерным вариантом осуществления.
[0140] Фиг. 2D иллюстрирует вид сверху направляющей секции направляющего устройства в соответствии с характерным вариантом осуществления.
[0150] Фиг. 2E иллюстрирует вид сверху направляющего устройства в соответствии с характерным вариантом осуществления.
[0160] Фиг. 2F иллюстрирует вид в поперечном сечении направляющего устройства по фиг. 2E в соответствии с характерным вариантом осуществления.
[0170] Фиг. 3 является упрощенной блок-схемой системы в соответствии с характерным вариантом осуществления.
[0180] Фиг. 4 является упрощенной блок-схемой системы в соответствии с характерным вариантом осуществления.
[0190] Фиг. 5 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0200] Фиг. 6 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0210] Фиг. 7 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0220] Фиг. 8 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0230] Фиг. 9A-9C являются концептуальными видами транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0240] Фиг. 10 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0250] Фиг. 11 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
[0260] Фиг. 12 является концептуальным видом транспортного средства, содержащего систему в соответствии с характерным вариантом осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0270] В последующем осуществлении изобретения для целей пояснения, а не ограничения, характерные варианты осуществления, раскрывающие конкретные подробности, изложены для того, чтобы обеспечивать полное понимание настоящих идей. Описания известных устройств, операционных систем, программного обеспечения, аппаратных средств и микропрограммного обеспечения могут опускаться, с тем не допускать затруднения в понимании описания примерных вариантов осуществления. Тем не менее, такие устройства, материалы и способы, которые являются в пределах компетенции специалистов в данной области техники, могут быть использованы в соответствии с характерными вариантами осуществления.
[0280] В общем, следует понимать, что чертежи и различные элементы, проиллюстрированные на них, не нарисованы в масштабе. Дополнительно, относительные термины, такие как "выше", "ниже", "верх", "низ", "верхний", "нижний", "левый", "правый", "вертикальный" и "горизонтальный", используются для того, чтобы описывать взаимосвязи различных элементов друг с другом, как проиллюстрировано на прилагаемых чертежах. Следует понимать, что эти относительные термины имеют намерение охватывать различные ориентации устройства и/или элементов в дополнение к ориентации, проиллюстрированной на чертежах. Например, если устройство перевернуто относительно вида на чертежах, элемент, описанный как "выше" другого элемента, к примеру, теперь находится "ниже" этого элемента. Аналогично, если устройство поворачивается на 90 градусов относительно вида на чертежах, то элемент, описанный как "вертикальный", к примеру, теперь является "горизонтальным".
[0290] Фиг. 1A является концептуальным видом, иллюстрирующим транспортное средство 101, которое включает в себя компоненты системы для направления водителя транспортного средства 101 в соответствии с характерным вариантом осуществления. На фиг. 1A, транспортное средство 101 показано как находящееся вне проезжей части 102. В характерном варианте осуществления, транспортное средство является автомобилем. Тем не менее, предполагаются другие транспортные средства, включающие в себя мотоциклы и грузовики. Эта система также может быть реализована, чтобы направлять группу транспортных средств (т.е. "колонну") по проезжей части, чтобы поддерживать отдельные транспортные средства колонны на соответствующих полосах движения и с надлежащим расстоянием между ними.
[0300] Направляющее устройство 103 размещается на обочине проезжей части 102, к примеру, на осветительном столбе или другом подходящем сооружении (не показано на фиг. 1A). Как очевидно из прочтения настоящего описания, настоящие идеи предполагают множество направляющих устройств 103, расположенных вдоль проезжей части 102 и размещенных через регулярные или нерегулярные интервалы. Множество подробностей направляющего устройства 103 предоставляются ниже в связи с описанием характерных вариантов осуществления, проиллюстрированных на фиг. 2A-2F.
[0310] В характерном варианте осуществления, направляющее устройство 103 содержит источник света, предоставляемый в сети наружного освещения. Каждое направляющее устройство 103 может содержать устройство связи. Сеть освещения формируется посредством функционального соединения устройств связи направляющих устройств 103. Таким образом, направляющие устройства 103 могут обмениваться данными с другими направляющими устройствами 103 сети. Направляющие устройства 103 также могут обмениваться данными друг с другом напрямую или через удаленный сервер (не показан). Устройства связи направляющих устройств сети наружного освещения выполнены с возможностью работать согласно одному или более из ряда известных протоколов связи, включающих в себя IEEE 802.11 и его семейство, общую службу пакетной радиопередачи (GPRS), протокол согласно стандарту международной системы мобильной связи (IMT) 2000 (третьего поколения (3G) или четвертого поколения (4G)), так называемый WiFi-протокол, Ethernet-протокол и один из множества Интернет-протоколов. Следует отметить, что упомянутые протоколы являются просто иллюстративными и не имеют намерение быть ограничивающими. В общем, направляющие устройства 103 содержат устройства связи, выполненные с возможностью передавать информацию либо принимать информацию, либо выполнять и то, и другое через надлежащий протокол связи, выбранный проектировщиком сети наружного освещения.
[0320] Некоторые направляющие устройства 103, неспособные обмениваться данными с удаленным сервером напрямую, могут отправлять информацию в другие соседние направляющие устройства 103, которые имеют каналы прямой связи на удаленный сервер. Эти направляющие устройства 103 затем передают информацию на удаленный сервер. Удаленный сервер также может передавать информацию в направляющие устройства 103 напрямую или через другие направляющие устройства 103, которые затем передают информацию в направляющие устройства 103, не поддерживающие прямую связь с удаленным сервером. Дополнительные подробности реализации направляющих устройств 103, управляемых в сети, могут предоставляться согласно идеям находящейся в общей собственности заявки на патент (США) номера (Адвокатская выписка номер PH 015686), озаглавленной "OUTDOOR LIGHTING NETWORK CONTROL SYSTEM", поданной [требуется заполнить дату подачи] и указывающей Hong Zhai, Kiran Challapali, David Cavalcanti и Jianfeng Wang в качестве авторов изобретения. Раскрытие сущности этой заявки на патент конкретно содержится в данном документе по ссылке.
[0330] В настоящем варианте осуществления, световой луч 104, имеющий конкретную длину волны, направлен под углом 105 из направляющего устройства 103. Светочувствительный датчик (не показан на фиг. 1A) в транспортном средстве 101 обнаруживает длину волны светового луча 104. На основе обнаруженной длины волны выполняется определение касательно относительной позиции транспортного средства 101 на проезжей части 102. Как подробнее описано ниже, определение может осуществляться в процессоре (не показан на фиг. 1) в транспортном средстве 101 или может осуществляться посредством процессора сети наружного освещения, компонентом которой является направляющее устройство 103. В любом случае, после того, как длина волны луча 104 света обнаружена, выполняется корреляция между длиной волны обнаруживаемого света и позицией транспортного средства 101 на основе угла 105 светового луча, принимаемого в детекторе транспортного средства 101.
[0340] В настоящем примере, из длины волны луча 104 света, проецируемого под углом 105, выполняется определение в отношении того, что транспортное средство 101 съехало с проезжей части 102 (например, движется по бровке или уступу проезжей части 102). Определение может осуществляться в процессоре (не показан на фиг. 1) в транспортном средстве 101 или может осуществляться посредством процессора сети освещения, компонентом которой является направляющее устройство 103 после того, как информация относительно обнаруженной длины волны передается из транспортного средства 101 в сеть освещения. Эта информация передается водителю транспортного средства 101 так, что может быть предпринято требуемое корректирующее действие. В одном варианте осуществления, эта информация также передается в систему управления транспортным средством 101, выполненную с возможностью предпринимать корректирующее действие (например, брать на себя рулевое управления транспортным средством, тормозить и т.д.) В других вариантах осуществления, содержащих колонну транспортных средств, система управления может предоставляться в одном из транспортных средств (например, в ведущем транспортном средстве) или может быть частью такой сети наружного освещения, как сеть, описанная выше. В варианте осуществления, содержащем единую систему управления, информация касательно корректирующего действия может быть передана в каждое из транспортных средств колонны, так что соответствующее корректирующее действие может быть предпринято в надлежащем местоположении.
[0350] Как отмечено выше, дорожные условия могут не позволять четкого различения водителем либо системой слежения за полосами движения на основе камеры линий, которые размечают обочину проезжей части 102, и линий, которые размечают полосы движения либо середину проезжей части 102. Как подробнее описано ниже, дисплей может предоставляться в транспортном средстве 101, чтобы уведомлять водителя в отношении того, какое действие должно предприниматься, чтобы возвращать транспортное средство на проезжую часть 102. Следует отметить, что цвет света, просматриваемого водителем под конкретным углом 105, также может предоставлять указание местоположения транспортного средства 101 на проезжей части 102. Например, в текущей позиции, длина волны светового луча 104, просматриваемого под углом 105, может представлять собой красный цвет, что указывает то, что транспортное средство съехало с проезжей части 102 и возможно подвергается опасности аварии. На основе этих визуальных оценок, водитель может принимать корректирующие меры, чтобы возвращать транспортное средство 101 на проезжую часть 102.
[0360] Фиг. 1B является концептуальным видом, иллюстрирующим транспортное средство 101, которое включает в себя компоненты системы для направления водителя транспортного средства 101 в соответствии с характерным вариантом осуществления. Транспортное средство 101 показывается как размещенное на проезжей части 102, как и положено. В настоящем варианте осуществления, световой луч 106 с конкретной длиной волны направлен под углом 107 из направляющего устройства 103. Светочувствительный датчик (не показан на фиг. 1A) обнаруживает длину волны луча 104 света, и на основе обнаруженной длины волны выполняется определение касательно относительной позиции транспортного средства 101 к проезжей части 102. После того, как длина волны луча 106 света обнаружена, выполняется корреляция между обнаруженной длиной волны света и позицией транспортного средства 101 на основе угла 107 транспортного средства 101.
[0370] Из длины волны луча 106 света, проецируемого под углом 107, выполняется определение в отношении того, что транспортное средство 101 безопасно размещается на проезжей части 102 (например, движется между осевой линией и боковой линией проезжей части 102). Если имеется возможность, эта информация может быть передана водителю транспортного средства 101 через дисплей (не показан на фиг. 1), чтобы уведомлять водителя о том, что транспортное средство 101, как положено, находится на проезжей части 102, и, следовательно, корректирующие действия не требуются. Эта информация не обязательно отправляется водителю транспортного средства 101 через дисплей (не показан на фиг. 1) поскольку не требуется предпринимать корректирующее действие. С другой стороны, цвет света светового луча 106, просматриваемого водителем под конкретным углом 107, также предоставляет указание местоположения транспортного средства 101 на проезжей части 102. Например, в одном варианте осуществления, в текущей позиции длина волны луча 106 света, просматриваемого под углом 107, может представлять собой зеленый цвет, что указывает то, что транспортное средство, как положено, размещается на проезжей части 102. В другом варианте осуществления, в текущей позиции длина волны луча 106 света, просматриваемого под углом 107, может представлять собой типичный цвет, используемый посредством системы освещения для общего освещения проезжей части 102, что указывает то, что транспортное средство, как положено, размещается на проезжей части 102. В характерных вариантах осуществления, направляющее устройство выполнено с возможностью предоставлять выбранное число цветов, каждый из которых предназначен для предварительно определенной угловой ширины. Когда транспортное средство 101 размещается корректно, обнаруживается одна длина волны (или цвет (например, зеленый)). Когда транспортное средство 101 отходит от целевой позиции (за пределы дорожных полос движения), детектор должен обнаруживать другие длины волн, либо водитель транспортного средства 101 должен замечать другой шаблон освещения (например, цвета) из направляющего устройства 103, либо происходит и то, и другое.
[0380] Фиг. 1C является концептуальным видом, иллюстрирующим транспортное средство 101, которое включает в себя компоненты системы в соответствии с характерным вариантом осуществления. Направляющее устройство 103 предоставляется на придорожном сооружении 108, таком как столб линии электропередач. Транспортное средство 101 содержит светоприемник (не показан на фиг. 1C), описанный ниже в связи с характерными вариантами осуществления. Светоприемник может быть установлен наверху транспортного средства 101, под ветровым стеклом, на передней поверхности транспортного средства 101 или в любом другом местоположении транспортного средства 101, подходящем для обнаружения света из направляющего устройства 103.
[0390] Направляющее устройство 103 располагается на достаточной высоте над проезжей частью 102, чтобы уменьшать помехи вследствие накопления мусора с дороги от проходящих мимо транспортных средств. Высота направляющего устройства 103 на придорожном сооружении 108 предпочтительно составляет 10-20 футов или примерно равна высоте придорожной осветительной арматуры. Направляющее устройство 103 может иметь навес или крышку над собой, чтобы иметь защиту от грязи и мусора. Как отмечено выше, множество направляющих устройств 103, размещенных через регулярные или нерегулярные интервалы, предполагается посредством настоящих идей, при этом каждое направляющее устройство 103 выполнено с возможностью обмениваться данными с транспортным средством 101 или с другими направляющими устройствами 103 сети наружного освещения, или с удаленным сервером, или с комбинацией вышеозначенного.
[0400] Светоприемник может принимать свет из направляющего устройства 103 в диапазоне углов α, как показано. Диапазон углов α должен быть достаточно большим по вертикали и горизонтали, чтобы предоставлять возможность детектору принимать свет и другие сигналы из направляющего устройства 103, даже когда автомобиль находится сравнительно близко к придорожному сооружению 108 или даже под придорожным сооружением 108. Фиг. 1 иллюстрирует только диапазон углов α по вертикали. Диапазон углов α может быть большим для того, чтобы детектор принимал свет из другого направляющего устройства (не показано на фиг. 1C) позади транспортного средства 101.
[0410] Фиг. 2A иллюстрирует концептуальный вид направляющего устройства 103 сверху и в соответствии с характерным вариантом осуществления. Направляющее устройство 103 содержит множество направляющих сегментов 201. Каждый направляющий сегмент 201 содержит источник 202 света, расположенный вдоль его внутренней поверхности. Каждый направляющий сегмент 201 предоставляет отдельный световой луч 203 из поверхности, противостоящей источнику 202 света. Каждый отдельный световой луч 203 имеет уникальную световую характеристику в конкретном диапазоне углов. В связи с этим, в качестве иллюстрации, направляющее устройство 103 предоставляет несколько уникальных лучей света, при этом каждый луч излучает направленный свет. В проиллюстрированном варианте осуществления, охват световых лучей 203 составляет 360°. Тем не менее, это не обязательно. Наоборот, отдельные лучи 203 направляющего устройства 103 могут охватывать диапазон углов от 210° до 360°. Например, диапазон углов составляет 240°. Лучи в диапазоне от 30° до 210° должны направлять свет из направляющего устройства 103 в направлении поверхности проезжей части 102.
[0420] Фиг. 2B иллюстрирует вид в перспективе направляющего устройства 103 в соответствии с характерным вариантом осуществления. Направляющее устройство содержит верхнюю поверхность 204, и каждый направляющий сегмент 201 содержит внешнюю поверхность 205 и внутреннюю поверхность 206. Лучи 203 формируются посредством источника света (не показан на фиг. 2B) около внутренней поверхности 206 каждого направляющего сегмента 201 и излучаются на внешней поверхности 205 каждого направляющего сегмента 201. Как можно принимать во внимание из изучения фиг. 2A и 2B, каждая внешняя поверхность 205 каждого направляющего сегмента 201 имеет угловое смещение (т.е. не расположена в одной плоскости) относительно внешней поверхности 205 смежного направляющего сегмента 201. Это обеспечивает то, что каждый световой луч 203 передается в уникальном направлении. Таким образом, направленный свет (лучи 203) предоставляется из каждого направляющего сегмента 201 направляющего устройства 103.
[0430] Фиг. 2C иллюстрирует вид в поперечном сечении одной направляющей секции 201 вдоль линии a-b на фиг. 2B направляющего устройства 103 в соответствии с характерным вариантом осуществления. Верхняя поверхность 204 и противостоящая нижняя поверхность 207 являются непрозрачными. В качестве иллюстрации, внутренним поверхностям 208 верхней поверхности 204 и нижней поверхности придается оптическая шероховатость, чтобы способствовать поглощению падающего света и задерживать пропускание света через них. Аналогично, внутренней поверхности 206 также придается шероховатость, чтобы способствовать зеркальному отражению света из нее и задерживать пропускание через нее. В отличие от этого, внешняя поверхность 205 является практически прозрачной для света, излучаемого из источника 202 света, способствуя пропусканию светового луча 203 из каждого направляющего сегмента 201.
[0440] В характерном варианте осуществления, каждый направляющий сегмент 201 является практически полым, при этом ограничивающие поверхности формируются из стеклянного или подходящего пластического материала. Альтернативно, каждый направляющий сегмент 201 может быть практически сплошным, при этом всем сторонам придается шероховатость за исключением внешней поверхности 205. С другой стороны, направляющий сегмент 201 содержит стекло или подходящий пластик. Следует отметить, что конструкция и материалы направляющего сегмента являются просто иллюстративными, и что другие конструкции и материалы допускаются для направляющих сегментов 201 направляющего устройства 103.
[0450] Фиг. 2D иллюстрирует вид сверху одной направляющей секции 201 направляющего устройства 103 в соответствии с характерным вариантом осуществления. Направляющая секция 201 содержит источник 202 света, расположенный на внутренней части направляющей секции 201 и вдоль внутренней поверхности 206. Иными словами, может быть предусмотрено несколько источников 202 света, к примеру, проиллюстрированная пара источников света. В качестве иллюстрации, источники 202 света являются светоизлучающими диодами (светодиодами). В характерном варианте осуществления, источник 202 света может быть таким, как описано в находящемся в общей собственности патенте (США) 7569807, озаглавленном "Light Source with Photosensor Light Guide". Раскрытие сущности этого патента конкретно содержится в данном документе по ссылке.
[0460] Каждый из отдельных лучей 203 содержит различную световую характеристику в конкретном диапазоне углов. Например, как подробнее описано ниже, свет каждого светового луча 203 может иметь уникальную длину волны; или свет каждого светового луча 203 может быть модулированным по коду светом; или каждый световой луч 203 может излучать свет с уникальным углом поляризации. Таким образом, каждый сегмент 201 направляющего устройства 103 может быть идентифицирован в светоприемном устройстве (не показано на фиг. 2A) через свою уникальную световую характеристику.
[0470] В характерном варианте осуществления, каждый световой луч 203 может быть представлен посредством центрального значения его диапазона углов. Ширина луча задается как ширина диапазона углов светового луча 203. Например, допустим, что направляющее устройство 103 содержит 60 сегментов 201. Если k-тый луч (где k является положительным целым числом и меньше или равно общему числу лучей направляющего устройства 103) из k-того направляющего сегмента 201 имеет диапазон углов [30,0°, 36,0°], то k-тый луч также представляется посредством 33,0°. Угловой сдвиг между двумя смежными лучами задается как разность между начальными углами в диапазонах углов. Например, если луч k имеет диапазон углов [30,0°, 36,0°], а луч k+1 имеет диапазон углов [36,0°, 42,0°], угловой сдвиг от луча k к k+1 составляет 6°. В другом примере, если луч k имеет диапазон углов [30,0°, 39,0°], а луч k+1 имеет диапазон углов [36,0°, 45,0°], угловой сдвиг от луча k к k+1 по-прежнему составляет 6°.
[0480] В конкретных вариантах осуществления, свет из двух лучей 203 из смежных направляющих сегментов 201 не перекрывается, либо перекрывающийся диапазон углов этих двух лучей 203 намного меньше диапазона углов каждого соответствующего светового луча 203. В этом случае, типичный диапазон углов для каждого светового луча 203 составляет приблизительно от 0,1° до 5,0°. Например, 0,1°, 0,5°, 1,0°, 2,0° и 3,0° обеспечивают точность в 0,052, 0,026, 0,52, 1,05 и 1,57 метров, соответственно, на расстоянии в 30 метров от придорожного сооружения 108, в котором расположено направляющее устройство 103. В других вариантах осуществления, свет из двух или более смежных лучей перекрывается. В этом случае, типичный диапазон углов каждого луча может быть очень большим, например, 1,0°-60,0°. Например, если ширина луча составляет 6,0°, а угловой сдвиг между двумя смежными лучами составляет 2,0°, каждое направление из направляющего устройства 103 покрывается посредством 3 смежных лучей направляющего устройства; и каждый диапазон углов 2,0° покрывается посредством уникального набора из трех смежных лучей 203.
[0490] В другом примере, ширина луча составляет 6°, а угловой сдвиг составляет 4°. Следовательно, некоторые диапазоны углов с шириной 2° покрываются посредством только одного луча, и другие диапазоны углов с шириной 2° покрываются посредством двух смежных лучей. В обоих примерах точность определяется посредством ширины диапазона углов, т.е. в 2o, что обеспечивает точность в 1,05 метра на расстоянии 30 метров от направляющего устройства 103.
[0500] В другом примере, ширина луча составляет 6°, а угловой сдвиг между двумя смежными лучами составляет 5°. Следовательно, некоторые диапазоны углов с шириной луча в 4° покрываются посредством только одного луча, и другие диапазоны углов с шириной луча в 1° покрываются посредством двух смежных лучей. В еще одном другом примере, ширина луча составляет 10°, а угловой сдвиг составляет 2°, каждый диапазон углов в 2° покрывается посредством уникального набора из пяти смежных лучей. Во всех этих примерах, если диапазон углов покрывается посредством двух или более смежных лучей 203, диапазон углов может быть представлен посредством угла (направления) со значением среднего срединных значений диапазонов углов этих лучей. Например, для трех смежных лучей с диапазонами углов [30,0°, 39,0°], [36,0°, 45,0°] и [42,0°, 51,0°], соответственно, диапазон углов [36,0°, 39,0°] покрывается посредством двух лучей и может быть представлен посредством 37,5°; диапазон углов [39,0°, 42,0°] покрывается посредством только одного луча и может быть представлен посредством 40,5°; и диапазон углов [42,0°, 45,0°] покрывается посредством двух лучей и может быть представлен посредством 43,5°. Следовательно, в этом примере полный диапазон углов, покрытый посредством трех смежных лучей 203, состоит из нескольких различных диапазонов углов с шириной в 3° вместо ширины луча в 9°.
[0510] В конкретных вариантах осуществления, свет из каждого направляющего сегмента 201 направляющего устройства 103 имеет уникальную длину волны в предварительно определенном угловом охвате (например, направленный свет из соответствующих внешних поверхностей 205 направляющего устройства 103). В этом случае, каждый источник 202 света каждого направляющего сегмента 201 может быть выбран с возможностью излучать уникальную длину волны. Альтернативно, каждый источник 202 света может быть источником белого света, и уникальный цветной светофильтр может предоставляться на внешней поверхности 205, причем каждый цветной светофильтр выполнен с возможностью пропускать свет конкретной длины волны в предварительно определенном угловом охвате из соответствующих внешних поверхностей 205 направляющего устройства 103.
[0520] В другом варианте осуществления, источник 202 света каждого направляющего сегмента направляющего устройства 103 выполнен с возможностью предоставлять уникально модулированный (кодированный) световой луч. Кодированный свет в каждом световом луче 203 предоставляет возможность идентификации каждого направляющего сегмента 201, а использование таких технологий, как технологии, описанные ниже, дает возможность определения местоположения транспортного средства 101 относительно полос движения проезжей части 102. Кроме того, кодированный свет также может включать в себя идентификационные данные направляющего устройства 103, так что приемное устройство в транспортном средстве 101 информируется относительно местоположения источника принимаемого света. Кодированный свет может быть таким, как описано в находящемся в общей собственности патенте (США) 7689130, озаглавленном "Method and Apparatus for Illumination and Communication" автора Ian Ashdown. Раскрытие сущности этого патента конкретно содержится в данном документе по ссылке. Следует подчеркнуть, что технологии кодирования света, отличные от широтно-импульсной модуляции (PWM), к примеру, раскрытой в патенте Ashdown, предполагаются для реализации согласно настоящим идеям.
[0530] В другом варианте осуществления, видимый свет используется посредством различных лучей направляющего устройства 103, и водитель видит различные цвета света, падающего от различных направлений направляющего устройства. Источники света направляющего устройства 103 могут быть специальными источниками света, используемыми только для направления, а не для общего освещения. Водитель видит различные цвета, когда транспортное средство приближается к направляющему устройству 103 вдоль проезжей части 102. Разность в этих цветах должна быть небольшой, чтобы исключать чрезмерное отвлечение водителя. Водитель может оценивать, где на проезжей части 102 находится транспортное средство, на основе наблюдаемых цветов и наблюдаемого расстояния от направляющего устройства 103. Эта оценка может не быть точной. Процессор в транспортном средстве или в сетях освещения может извлекать более точное местоположение транспортного средства относительно источника(ов) света и до краев проезжей части 102.
[0540] В другом варианте осуществления, направляющее устройство 103 состоит из двух вышеуказанных альтернатив. Например, каждый направляющий сегмент 201 может содержать источник света, который излучает свет уникальной длины волны, и каждый световой луч 203 кодируется с помощью идентичного кода, который включает в себя информацию, идентифицирующую местоположение всех направляющих устройств 103 в конкретной сети наружного освещения вдоль проезжей части 102. В другом примере, каждый направляющий сегмент 201 выполнен с возможностью излучать свет уникальной длины волны, и передающее RF-устройство на направляющем устройстве 103 или придорожном сооружении 108 передает во всех направлениях (например, всенаправленная антенна) RF-сигналы с идентичной информацией, которые включают в себя идентификационные данные направляющего устройства 103.
[0550] Фиг. 2E иллюстрирует направляющее устройство 103, а фиг. 2F иллюстрирует направляющее устройство 103 в поперечном сечении вдоль линии 2E-2E. В проиллюстрированном варианте осуществления, направляющее устройство 103 не содержит множество направляющих сегментов (например, направляющих сегментов 201). Наоборот, направляющее устройство 103 содержит внешнюю поверхность 209, которая аппроксимирует цилиндр, нижнюю поверхность 210 (например, обращенную к проезжей части 102) и верхнюю поверхность 211. Кроме того, направляющее устройство 103 содержит источник 202 света (например, светодиод), предоставленный в нем и выполненный с возможностью излучать свет, имеющий уникальную характеристику. Например, источник света может находиться в геометрическом центре направляющего устройства 103 и может излучать свет, имеющий уникальную длину волны, или свет, имеющий уникальное направление поляризации, или свет, имеющий уникальный код (например, модулированный свет). Верхней поверхности 211 придается оптическая шероховатость, чтобы способствовать поглощению падающего света и задерживать пропускание света через нее. В отличие от этого, внешняя поверхность 209 и нижняя поверхность 210 являются практически прозрачными для света, излучаемого из источника 202 света, расположенного в направляющем устройстве.
[0560] Направляющее устройство 103 выполнено с возможностью пропускать свет в предварительно определенной угловой ширине. В одном варианте осуществления, направляющее устройство 103 выполнено с возможностью излучать свет на 360° (т.е. всенаправленно). В других вариантах осуществления, угловой охват выбирается таким образом, чтобы обеспечивать прием света посредством светочувствительного датчика, расположенного в транспортном средстве 101, или быть видимым водителем транспортного средства или и для того, и для другого.
[0570] В описанных вариантах осуществления, направляющее устройство 103 излучает свет в видимом спектре. Настоящие идеи предполагают передачу электромагнитного излучения в невидимом спектре. Иными словами, каждое направляющее устройство 103 содержит множество излучателей, причем каждый излучатель обозначает конкретное направление из направляющего устройства. Например, инфракрасные (IR) или ультрафиолетовые (ультрафиолетовые) сигналы могут быть переданы направленно из направляющего устройства и в выбранном угловом охвате. Инфракрасный или ультрафиолетовый сигнал из каждого направляющего сегмента 201 может иметь уникальную длину волны или может иметь уникальный (код) модуляции, или может иметь конкретный угол поляризации, указывающий направление его источника как практически идентичное направлению, в котором источники 202 света предоставляют направленные лучи 203 видимого света. Сигналы, излучаемые посредством направляющего устройства 103, принимаются посредством детектора в транспортном средстве, и позиция транспортного средства относительно проезжей части 102 определяется посредством таких технологий, как технологии, описанные ниже.
[0580] Фиг. 3 является упрощенной блок-схемой системы 300 для направления водителя транспортного средства в соответствии с характерным вариантом осуществления. Система 300 может быть реализована полностью в транспортном средстве (например, транспортном средстве 101) и выполнена с возможностью работать в связи с сетью наружного освещения, которая включает в себя множество направляющих устройств 103 вдоль проезжей части. Как отмечено выше, сеть наружного освещения может быть такой, как описано в указанной ссылкой находящейся одновременно на рассмотрении заявке, озаглавленной "OUTDOOR LIGHTING NETWORK CONTROL SYSTEM", или другой интеллектуальной сетью освещения в пределах компетенции специалистов в данной области техники. Определенные подробности аспектов направляющего устройства 103 описаны выше и не повторяются, чтобы не допускать затруднения в понимании описания настоящих вариантов осуществления.
[0590] Система 300 содержит процессор 301. Процессор 301 может быть процессором в транспортном средстве 101, подвергаемым обработке с помощью программного обеспечения (не показано) и содержащим запоминающее устройство (не показано), чтобы предоставлять вычисления системы 300, такой как система, описанная ниже. Альтернативно, процессор 301 может быть специализированным процессором в транспортном средстве 101, подвергаемым обработке с помощью программного обеспечения (не показано) и содержащим запоминающее устройство (не показано), чтобы предоставлять вычисления системы 300, такой как система, описанная ниже. В общем, процессор содержит центральный процессор (CPU), который может выполнять компьютерные программы, загруженные в него. Процессор 301 может быть микропроцессором, программируемым логическим устройством (PLD), таким как программируемая пользователем вентильная матрица (FPGA), подвергаемым обработке с помощью требуемых ядер, чтобы осуществлять вычисления системы 300.
[0600] При использовании процессора или CPU, включается запоминающее устройство (не показано) для сохранения выполняемого программного обеспечения/микропрограммного обеспечения и/или исполняемого кода, который определяет позицию транспортного средства 101 относительно краев или полос движения проезжей части 102. Дополнительно, запоминающее устройство сохраняет программное обеспечение/микропрограммное обеспечение и/или исполняемый код, чтобы отображать рекомендуемую позицию транспортного средства 101 или предоставлять инструкции водителю (например, визуальные или звуковые, или и то, и другое), чтобы регулировать позицию транспортного средства 101 на проезжей части 102. Запоминающее устройство может представлять собой любое число, типы и комбинацию энергозависимого оперативного запоминающего устройства (RAM) энергонезависимого постоянного запоминающего устройства (ROM) и может сохранять различные типы информации, такие как компьютерные программы и исполняемый фрагмент программных алгоритмов посредством процессора или CPU. Запоминающее устройство может включать в себя любое число, типы и комбинацию материальных машиночитаемых носителей хранения данных, таких как накопитель на дисках, электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), CD, DVD, флэш-память на основе универсальной последовательной шины (USB) и т.п.
[0610] Система 300 содержит светочувствительный датчик 302, электрически соединенный с процессором 301. Светочувствительный датчик 302 обнаруживает свет из направляющих устройств 103, расположенных вдоль обочины проезжей части 102. В качестве иллюстрации, светочувствительный датчик 302 содержит полупроводниковый светоприемник или матрицу полупроводниковых детекторов. В общем, светочувствительный датчик 302 выполнен с возможностью замерять свет с каждой длиной волны, кодом или углом поляризации, излучаемым из направляющего устройства 103. Например, в варианте осуществления, в котором направляющее устройство 103 излучает свет более шести соответствующих (6) диапазонов углов, светочувствительный датчик 302 должен иметь возможность обнаруживать каждую из шести излучаемых длин волн света. Как упоминается выше, на основе обнаруженной длины волны (или другой уникальной характеристики света) выполняется определение в отношении позиции транспортного средства 101 относительно проезжей части 102.
[0620] В конкретных вариантах осуществления, как отмечено выше, свет, принимаемый посредством светочувствительного датчика 302, может иметь уникальные длины волн или может быть модулирован (кодированный свет) с помощью уникального шаблона, или может иметь уникальный угол поляризации. Светочувствительный датчик 302 выполнен с возможностью обнаруживать и различать свет, исходящий из направляющего устройства 103, на основе его уникальной характеристики (например, длины волны, поляризации или кода). В конкретных вариантах осуществления, светочувствительный датчик 302 выполнен с возможностью определять длину волны или другие характеристики света из направляющего устройства 103. Светочувствительный датчик 302 предоставляет данные длины волны или другой характеристики обнаруженного света в процессор 301. Процессор 301 затем определяет позицию транспортного средства 101 на проезжей части 102 на основе этих данных посредством таких способов, как способы, описанные ниже.
[0630] Отражение света может помогать светочувствительному датчику 302 при обнаружении света с уникальной длиной волны или модуляции с помощью уникального шаблона, если линия прямой видимости между направляющим устройством 103 и светочувствительным датчиком 302 блокируется. В других вариантах осуществления, светочувствительный датчик 302 направленно принимает свет из направляющего устройства 103 и преимущественно не принимает значительную часть света, отражаемого от проезжей части 102. В конкретных вариантах осуществления, светочувствительный датчик 302 может быть окружен посредством оболочки, которая блокирует свет под определенными углами. Альтернативно, светочувствительный датчик 302 может определять то, отражается свет от поверхности проезжей части 102 или от придорожного источника света, на основе угла падения. Например, светочувствительный датчик 302 может содержать несколько датчиков, которые внедряются на поверхность сферы с формой круглого шара. Каждый датчик принимает свет только вдоль направления от своей позиции к центру шара. Таким образом, входящее направление света может быть обнаружено посредством проверки того, какой датчик принимает свет. Датчики могут внедряться только со стороны поверхности сферы, чтобы принимать свет из определенных направлений.
[0640] В одном варианте осуществления, светочувствительный датчик 302 состоит из одного или нескольких фотодиодов, таких как фотодиоды, предлагаемые на рынке компанией Pacific Silicon Sensor Incorporated, Westlake Village, CA USA. Фотодиоды могут выступать в качестве оптических фильтров для того, чтобы управлять спектральной полосой пропускания света. Каждый фотодиод имеет возможность обнаруживать узкую полосу частот спектра. Несколько фотодиодов объединяются в комплект с тем, чтобы различать несколько длин волн.
[0650] В другом варианте осуществления, светочувствительный датчик 302 содержит анализатор светового спектра, который использует явления рассеяния света по мере того, как он проходит через треугольную призму. Полученный световой спектр используется для того, чтобы проверять, существуют или нет импульсы из предварительно заданного набора длин волн, используемые посредством источника света.
[0660] В другом варианте осуществления, светочувствительный датчик 302 может демодулировать (декодировать) принимаемый свет, который модулируется в направляющем устройстве 103. После демодуляции светочувствительный датчик 302 получает информацию, включающую в себя число лучей или направление, из которого испускается луч, и необязательно идентификационные данные направляющего устройства 103.
[0670] Другие иллюстративные варианты осуществления светочувствительного датчика 302 могут быть такими, как описано в патенте (США) 5144498, озаглавленном "Variable Wavelength Filter and Sensor System"; и патенте (США) 4806747, озаглавленном "Optical Direction of Arrival Sensor with Cylindrical Lens". Раскрытия сущности этих патентов конкретно содержатся в данном документе по ссылке.
[0680] В конкретных вариантах осуществления, светочувствительный датчик 302 может соединяться или быть частью GPS-устройства, сотового телефонного устройства, MP3-проигрывателя или любых других карманных устройств вместо интеграции в автомобиле. Эти устройства могут быть размещены под ветровым стеклом, на поверхности автомобиля или в любых других местах внутри и за пределами автомобиля, в которых они могут принимать свет и/или сигналы из направляющих устройств вдоль проезжей части 102.
[0690] В варианте осуществления, система 300 содержит приемо-передающее устройство 303. Приемо-передающее устройство 303 может быть одним из множества приемо-передающих устройств, подходящих для использования в осуществления связи между транспортным средством 101 и сетью освещения, которая содержит направляющее устройство 103. В характерном варианте осуществления, приемо-передающее устройство 303 ассоциировано с транспортным средством 101. Иными словами, приемо-передающее устройство 303 может быть расположено на или в транспортном средстве 101. В конкретных вариантах осуществления, приемо-передающее устройство 303 выполнено с возможностью предоставлять данные позиции транспортного средства из процессора 301 в сеть. Дополнительно или альтернативно, приемо-передающее устройство 303 может передавать данные длины волны и другие характеристики света, обнаруженного посредством светочувствительного датчика 302, напрямую в сеть.
[0700] В одном варианте осуществления, приемо-передающее устройство 303 передает данные длины волны или другие характеристики света, обнаруженного посредством светочувствительного датчика 302, напрямую в оптическую сеть освещения. Определение местоположения транспортного средства осуществляется в процессоре в оптической сети освещения. Если транспортное средство 101 находится на проезжей части 102, оптическая сеть освещения необязательно использует передающее устройство на осветительном столбе, чтобы передавать информацию местоположения в транспортное средство, так что водитель транспортного средства информируется относительно позиции транспортного средства (например, на какой он полосе движения). Если транспортное средство 101 съехало с проезжей части 102, оптическая сеть освещения может передавать эту информацию в транспортное средство 101 и оповещать водителя транспортного средства. Кроме того, эта информация также может быть передана в другие транспортные средства на проезжей части 102 и работникам аварийно-спасательных служб.
[0710] В варианте осуществления, приемо-передающее устройство 303 может совместно размещаться или быть неразъемной частью направляющего устройства 103, так что могут приниматься данные из системы 300. Приемо-передающее устройство 303 может предоставлять идентификационный код или другие признаки, чтобы идентифицировать конкретное транспортное средство, которое передает данные. Таким образом, может быть определено местоположение транспортного средства 101 относительно конкретного направляющего устройства 103. Эта информация местоположения может быть использована для того, чтобы оповещать работников аварийно-спасательных служб о том, что транспортное средство 101 съехало с проезжей части 102, и предоставлять его местоположение.
[0720] Приемо-передающее устройство 303 выполнено с возможностью принимать местоположения (например, GPS-координаты) направляющего устройства 103, данные локальной дорожной карты, данные локального трафика и любую другую связанную с дорогой и трафиком информацию. Эта информация может предоставляться из сети освещения, которая содержит направляющее устройство(а) 103. Координаты местоположения направляющего устройства, комбинированные с относительным местоположением от транспортного средства до направляющего устройства, используются для того, чтобы извлекать точные координаты местоположения транспортного средства. Координаты местоположения транспортного средства используются для того, чтобы сравнивать данные местоположения проезжей части 102 и, следовательно, отображать дорожную карту вместе с позицией транспортного средства на карте. Направляющее устройство(а) может обновлять данные локальной дорожной карты вследствие недавно появившихся сооружений и актуальных аварий, которые передаются в транспортное средство, чтобы получать более информативное отображение транспортного средства вместе с дорожной картой.
[0730] Приемо-передающее устройство 303 может быть беспроводным приемо-передающим устройством, таким как радиочастотное (RF) приемо-передающее устройство, выполненное с возможностью обмениваться данными напрямую с приемо-передающими устройствами сети освещения или через беспроводную сеть. Например, приемо-передающее устройство 303 может быть узлом сети беспроводной связи, такой как мобильная телефонная сеть. Также предполагается, что приемо-передающее устройство 303 выполнено с возможностью обмениваться данными с аналогичными приемо-передающими устройствами в других транспортных средствах, чтобы передавать свои данные позиции и принимать данные позиции других транспортных средств.
[0740] В варианте осуществления, система 300 включает в себя систему 304 аварийной сигнализации. Система 304 аварийной сигнализации выполнена с возможностью принимать сигнал оповещения из процессора 301 и предоставлять тревожное сообщение водителю. Сигнал оповещения формируется в процессоре 301 и указывает то, что транспортное средство находится в рискованной позиции (например, съехало с проезжей части 102). Сигнал оповещения определяется из длины волны света, обнаруженного посредством светочувствительного датчика 302. Система 304 аварийной сигнализации может предоставлять звуковой сигнал тревоги или визуальный сигнал тревоги, или и тот, и другой сигнал водителю транспортного средства 101. Система 304 аварийной сигнализации может быть выполнена с возможностью предоставлять информацию относительно дорожных условий, участков дорожных работ и информацию об авариях. Эта информация предоставляется посредством процессора 301 и принимается, например, из одного из множества источников в сети освещения. В одном варианте осуществления, эта информация предоставляется во все транспортные средства группы (колонны), движущейся на проезжей части 102. В другом варианте осуществления, эта информация вместе с местоположением(ями) транспортного средства на проезжей части 102 передается в другие транспортные средства в сети и используется для того, чтобы поддерживать транспортное средство(а) на конкретных полосах движения, чтобы не допускать аварий вследствие плохих дорожных условий и дорожных работ, либо через сигналы тревоги водителю и реакцию водителя на сигналы тревоги, либо через систему автоматического управления транспортного средства.
[0750] В варианте осуществления, система 300 включает в себя базу 305 данных дорожных карт. В качестве иллюстрации, база 305 данных дорожных карт содержит GPS-базу данных, включающую в себя GPS-данные и местоположения направляющего устройства 103 сети освещения.
[0760] База 305 данных дорожных карт работает совместно с системой 306 отображения, которая отображает данные дорожной карты из базы 305 данных дорожных карт. Система 306 отображения отображает текущую позицию транспортного средства относительно проезжей части 102, его определение местоположения по GPS и позиции близлежащих направляющих устройств 103 сети освещения. Кроме того, система 306 отображения выполнена с возможностью предоставлять визуальный сигнал тревоги из системы 304 аварийной сигнализации. В варианте осуществления, система 306 отображения использует дисплей на приборной панели автомобиля. В другом варианте осуществления, система отображения использует внешний дисплей, такой как дисплеи смартфонов и автономных GPS-устройств, посредством кабелей или беспроводной передачи (например, Bluetooth-святи), чтобы подключать внешние дисплеи.
[0770] Фиг. 4 является упрощенной блок-схемой системы 400 для направления водителя транспортного средства в соответствии с характерным вариантом осуществления. Система 400 содержит многие из компонентов системы 300, описанной ранее. Иными словами, система 400 является менее сложной, чем система 300, и не содержит часть функциональности системы 300. Тем не менее, система 400 предоставляет полезный инструмент для направления водителя транспортного средства на проезжей части 102. Аналогично системе 300, система 400 может быть реализована полностью в транспортном средстве (например, в транспортном средстве 101) и выполнена с возможностью работать в связи с сетью освещения (не показана), которая включает в себя направляющие устройства (например, множество направляющих устройств 103) вдоль проезжей части 102. Определенные подробности аспектов сети освещения и направляющих устройств описаны выше и не повторяются, чтобы не допускать затруднения в понимании описания настоящих вариантов осуществления.
[0780] Система 400 содержит процессор 401. Процессор 401 может быть процессором в транспортном средстве 101, подвергаемым обработке с помощью программного обеспечения (не показано) и содержащим запоминающее устройство (не показано), чтобы предоставлять вычисления системы 300, такой как система, описанная ниже. Альтернативно, процессор 401 может быть специализированным процессором в транспортном средстве 101, подвергаемым обработке с помощью программного обеспечения (не показано) и содержащим запоминающее устройство (не показано), чтобы предоставлять вычисления системы 300, такой как система, описанная ниже. В общем, процессор 401 содержит центральный процессор (CPU), который может выполнять компьютерные программы, загруженные в него. Процессор 301 может быть микропроцессором, программируемым логическим устройством (PLD), таким как программируемая пользователем вентильная матрица (FPGA), подвергаемым обработке с помощью требуемых ядер, чтобы осуществлять вычисления системы 300. Многие подробности процессора 401 совпадают с подробностями для процессора 301 и не повторяются, чтобы не допускать затруднения в понимании текущих описанных вариантов осуществления.
[0790] Система 400 содержит светочувствительный датчик 402, электрически соединенный с процессором 401. Светочувствительный датчик 402 является практически идентичным светочувствительному датчику 302, описанному выше. В связи с этим, светочувствительный датчик 402 собирает свет из направляющего устройства 103, расположенного вдоль обочины проезжей части 102. Светочувствительный датчик 402 направленно принимает свет из направляющего устройства 103 и преимущественно не принимает значительную часть света, отражаемого от проезжей части 102. В качестве иллюстрации, светочувствительный датчик 402 содержит полупроводниковый светоприемник или матрицу полупроводниковых детекторов. В общем, светочувствительный датчик 402 выполнен с возможностью замерять свет с каждой длиной волны света, излучаемого из направляющего устройства 103.
[0800] В варианте осуществления, система 400 содержит передающее устройство 403. Передающее устройство 403 может быть беспроводным передающим устройством, таким как радиочастотное (RF) передающее устройство, выполненное с возможностью отправлять данные из транспортного средства 101 в приемное устройство (не показано на фиг. 4) сети освещения. Передающее устройство 403 выполнено с возможностью передавать уникальную характеристику(и) (например, длину волны, код, угол поляризации) света, принимаемого последним из направляющего устройства 103, в приемное устройство. Процессор в сети (например, расположенный в направляющем устройстве 103) затем может определять то, съехало транспортное средство 101 с проезжей части 102 или находится на проезжей части 102, посредством таких способов, как способы, описанные ниже. Эта информация может в дальнейшем использоваться посредством сети освещения. Например, если транспортное средство съехало с проезжей части 102, может отправляться предупреждение работникам аварийно-спасательных служб. Иными словами, местоположение транспортного средства относительно ближайшего направляющего устройства 103 может быть определено на основе информации, предоставляемой посредством передающего устройства 403 транспортного средства 101. Эта информация может включать в себя, например, информацию GPS-позиционирования из транспортного средства. Альтернативно, если информация GPS-позиционирования недоступна, местоположение транспортного средства может быть определено из местоположения приемного устройства, которое приняло передаваемые данные из передающего устройства 403. В общем, диапазон передачи передающего устройства 403 выбирается так, что только одно приемное устройство (например, расположенное в одном направляющем устройстве) принимает сигнал из передающего устройства. На основе местоположения приемного устройства, которое принимает сигнал, и максимального пробега передающего устройства может быть определено аппроксимированное местоположение транспортного средства 101. Иными словами, передающее устройство 403 непрерывно предоставляет данные длины волны, принятые посредством светочувствительного датчика 402 из ближайшего направляющего устройства 103, так что ближайшее приемное устройство, ассоциированное с ближайшим направляющим устройством 103, принимает данные.
[0810] В варианте осуществления, каждое транспортное средство 101 передает идентификационный код (например, идентификационный номер транспортного средства (VIN)) вместе с местоположением транспортного средства 101. В другом варианте осуществления, каждое транспортное средство использует уникальный идентификационный код передающего устройства (например, адрес уровня управления доступом к среде (MAC), который является уникальным для каждого передающего устройства 403) в качестве идентификационных данных транспортного средства, и идентификационный код вместе с транспортным средством регистрируется в сети наружного освещения (или в других сетях связи, используемых для связи с центром управления или властями). Дополнительно, настоящие идеи предполагают, что каждое передающее устройство 403 предоставляет уникальный идентификационный код для каждого транспортного средства 101. Каждое транспортное средство 101 регистрируется в сети освещения, так что известно не только местоположение транспортного средства, но также и другая идентифицирующая информация (например, владелец, марка и модель транспортного средства). В одном варианте осуществления, эта информация предоставляется посредством передающего устройства 403 только в случае, если система определения автомобиля определяет, что он съезжает с проезжей части 102. В другом варианте осуществления, эта информация предоставляется посредством передающего устройства 403 только тогда, когда информация запрашивается властями или центром управления через любой канал связи (к примеру, сеть наружного освещения, сотовые сети, выделенную ближнюю связь (DSRC)). В другом варианте осуществления, эта информация предоставляется посредством передающего устройства 403, при этом приемное устройство ассоциировано с ближайшим направляющим устройством 103, выполненным с возможностью принимать информацию. Эта идентифицирующая информация может быть использована для того, чтобы находить конкретное транспортное средство, если транспортное средство деактивируется, или его местоположение необходимо для властей (например, в так называемом сценарии оповещений о пропаже в США).
[0820] Следует подчеркнуть, что передающее устройство 403 не требуется для системы 400. Иными словами, процессор 401 может определять относительную позицию транспортного средства 101 на проезжей части 102 (например, съехало с дороги) на основе уникальных характеристик обнаруженного света (например, длины волны) и предоставлять водителю транспортного средства эту информацию, так что может быть предпринято корректирующее действие. Например, продолжая предыдущий пример, дисплей в транспортном средстве 101 может быть использован для того, чтобы показывать красный свет, если транспортное средство 101 съехало с проезжей части 102, или зеленый свет, если транспортное средство безопасно находится на проезжей части 102.
[0830] В варианте осуществления, система 400 содержит необязательную базу 404 данных дорожных карт. В качестве иллюстрации, база 404 данных дорожных карт содержит GPS-базу данных, включающую в себя GPS-данные и местоположения направляющего устройства 103 сети освещения. База 404 данных дорожных карт может быть выполнена с возможностью работать с помощью дисплея (не показан на фиг. 4), чтобы отображать текущую позицию транспортного средства относительно проезжей части 102, его определение местоположения по GPS и позиции близлежащих направляющих устройств 103 сети освещения.
[0840] Система 400 содержит необязательный модуль 405 обработки информации местоположения, который содержит запоминающее устройство, чтобы сохранять информацию местоположения (например, GPS-координаты) каждого из направляющих устройств 103 вдоль проезжей части 102. Обычно, информация местоположения, сохраненная в модуле 405 обработки информации местоположения, сохраняется в модуле, когда конкретное направляющее устройство 103 устанавливается, и может обновляться, если позиция направляющего устройства 103 изменяется. В случае если транспортное средство не имеет местоположений направляющих устройств или новых обновленных местоположений направляющих устройств 103, информация местоположения направляющих устройств может быть передана в транспортное средство 101. Информация местоположения направляющих устройств 103 может быть использована для того, чтобы определять местоположение транспортного средства, комбинированное с извлеченной относительной позицией транспортного средства 101 по отношению к направляющему устройству 103. Процесс определения может выполняться в транспортном средстве 101 или в направляющем устройстве 103.
[0850] Фиг. 5 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. В качестве иллюстрации, система является системой 300 или системой 400, или ее разновидностями в соответствии с настоящими идеями.
[0860] Транспортное средство 101 движется по проезжей части 102. Проезжая часть 102 содержит первый край 501 и второй край 502. В качестве иллюстрации, первый край 501 является смежным с бровкой или уступом проезжей части 102. Второй край 502 либо является осевой линией проезжей части 102, либо является смежным с другой бровкой или уступом.
[0870] Направляющее устройство 103 излучает свет с различными длинами волн в различных угловых секциях, как показано. В качестве иллюстрации, направляющее устройство 103 излучает световые лучи a1~a8 восьми (8) дискретных длин волн в угловых секциях, которые охватывают 90°. Аналогично, направляющее устройство 103 излучает световые лучи b1~b2 восьми дискретных длин волн в угловых секциях, которые охватывают приблизительно 30°. Поскольку каждая длина волны предоставляет свет различного цвета, в настоящей иллюстрации существует 10 цветов, которые могут быть обнаружены посредством светочувствительного датчика (например, светочувствительного датчика 302) транспортного средства 101 по мере того, как оно движется по проезжей части 102 в показанном направлении. Как очевидно из прочтения настоящего описания, световые лучи a1~a8 являются полезными для указания водителю того, что транспортное средство 101 "находится на дороге", а световые лучи b1~b2, являются полезными для указания водителю того, что транспортное средство 101 "съехало с дороги". Кроме того, относительная позиция транспортного средства на проезжей части 102 может быть дополнительно различена на основе фактически обнаруженной длины волны (и тем самым фактической угловой части света). Например, если светочувствительный датчик 302 обнаруживает свет, имеющий длину a1 волны в какой-либо точке вдоль квадранта в 90°, включающего в себя световые лучи a1~a8, можно определять то, что транспортное средство 101 находится ближе к краю 501, чем когда светочувствительный датчик 302 обнаруживает световой луч a3.
[0880] Следует подчеркнуть, что передача световых лучей (например, световых лучей a1~a8) с различными длинами волн является просто иллюстративным, и что могут быть переданы другие уникальные характеристики света. Например, направляющее устройство может пропускать световые лучи (например, обозначенные a1~a8, b1~b2) с десятью различными углами поляризации, и определение местоположения транспортного средства 101 выполняется из уникальных углов поляризации принимаемых лучей света.
[0890] Транспортное средство 101 движется справа налево на фиг. 5 вдоль пути, проиллюстрированного посредством пунктирной линии. Каждый угловой сегмент, и, следовательно, направление из направляющего устройства 103 представляются посредством световых лучей a1~a8 и b1~b2 с различными длинами волн. В конкретных вариантах осуществления, свет, излучаемый из направляющего устройства 103, является видимым светом и может наблюдаться водителем в показанном направлении движения. Транспортное средство 101 обнаруживает свет с различными длинами волн по мере того, как оно движется по показанному пути. Например, когда транспортное средство 101 движется по проиллюстрированному пути, светочувствительный датчик 302 первоначально обнаруживает световой луч a2 из направляющего устройства 103, имеющий уникальную длину волны; затем светочувствительный датчик 302 последовательно обнаруживает световые лучи a3, a4, a5, а6, a7 и a8 из направляющего устройства 103, каждый из которых имеет уникальную длину волны. На основе обнаруженной длины волны процессор 301, например, вычисляет позицию транспортного средства 101 относительно краев 501, 502 проезжей части 102. Кроме того, обнаруженные длины волн могут быть переданы посредством приемо-передающего устройства 303 в приемное устройство (не показано на фиг. 5), ассоциированное с направляющим устройством 103. Как описано выше, передаваемые длины волн могут быть использованы для того, чтобы определять позицию транспортного средства 101, и эта информация может предоставляться обратно в транспортное средство 101 или другим получателям (например, работникам аварийно-спасательных служб).
[0900] Если транспортное средство 101 "съехало с дороги" и движется за пределами края 501, световые лучи b1~b2 (каждый с уникальной длиной волны) должны обнаруживаться посредством светочувствительного датчика 302. На основе обнаруженных длин волн процессор 301, например, вычисляет позицию транспортного средства 101 относительно края 501 проезжей части 102. Обнаруженные длины волн могут быть переданы посредством приемо-передающего устройства 303 в приемное устройство (не показано на фиг. 5), ассоциированное с направляющим устройством 103. Как описано выше, передаваемые длины волн могут быть использованы для того, чтобы определять позицию транспортного средства 101, и эта информация может предоставляться обратно в транспортное средство 101 или другим получателям (например, работникам аварийно-спасательных служб).
[0910] Фиг. 6 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. В качестве иллюстрации, система является системой 300 или системой 400, или ее разновидностями в соответствии с настоящими идеями.
[0920] Транспортное средство 101 движется по проезжей части 102. Проезжая часть 102 содержит первый край 501 и второй край 502. В качестве иллюстрации, первый край 501 является смежным с бровкой или уступом проезжей части 102. Второй край 502 либо является осевой линией проезжей части 102, либо является смежным с другой бровкой или уступом.
[0930] Направляющее устройство 103 располагается вдоль первого края 501 проезжей части 102 и излучает свет с различными длинами волн в различных угловых секциях, как показано. В качестве иллюстрации, направляющее устройство 103 излучает световые лучи, имеющие двадцать (20) дискретных длин a1~a8, c1~c8, b1, b2, d1, d2 волн в угловых секциях, которые охватывают, например, 240°. В общем, направляющее устройство 103 излучает световые лучи, имеющие двадцать (20) дискретных длин a1~a8, c1~c8, b1, b2, d1, d2 волн в угловых секциях, которые охватывают больше 180°. Другое направляющее устройство 601, которое является практически идентичным направляющему устройству 103, предоставляется вдоль второго края 502 проезжей части 102. Направляющее устройство 601 излучает световые лучи с двадцатью (20) дискретными длинами A1~A8, C1, C2, B1~B8, D1, D2 волн в угловых секциях, которые охватывают 180°.
[0940] Как можно принимать во внимание из изучения фиг. 1, каждая точка на проезжей части 102 освещается посредством двух длин волн света, т.е. одной длины волны из направляющего устройства 103 и одной длины волны из направляющего устройства 601. Транспортное средство 101 движется справа налево на фиг. 6 вдоль пути, проиллюстрированного посредством пунктирной линии. В каждом местоположении вдоль пунктирной линии, свет из направляющих устройств 103, 601 обнаруживается посредством светочувствительного датчика 302. Таким образом, когда транспортное средство 101 едет по направлению к направляющему устройству 103, лучи a1~a8 обнаруживаются последовательно посредством светочувствительного датчика 302 из направляющего устройства 103 на обочине проезжей части 102 справа, а лучи C1~C8 обнаруживаются последовательно посредством светочувствительного датчика 302 из направляющего устройства 601 на обочине слева.
[0950] Например, транспортное средство 101, едущее справа налево на чертеже, наблюдает луч a2 из направляющего устройства 1 и луч C4 из направляющего устройства 2 в своей текущей точке. Это обнаружение света может представляться как пара (a2, C4) длин волн и представляет позицию на проезжей части 102. Транспортное средство 102, едущее слева направо на фиг. 6, обнаруживает луч a3 из направляющего устройства 2 и луч c5 из направляющего устройства 1 в своей текущей точке. Это обнаружение света может представляться как пара (a3, C5) длин волн и представляет позицию на проезжей части 102.
[0960] Вследствие объединения в упорядоченные пары световых лучей с конкретными длинами волн, которые передаются в каждую точку проезжей части 102, может быть более точно определено местоположение транспортного средства 101 на проезжей части 102. Например, если транспортное средство 101 находится ближе к краю 501, к примеру, в точке 603 на проезжей части 102, пара (a1, C4) длин волн света может быть обнаружена посредством светочувствительного датчика 302. Аналогично, если транспортное средство 101 находится близко ко второму краю 502, к примеру, в точке 604 на проезжей части 102, пара (a4, C1) длин волн может быть обнаружена посредством светочувствительного датчика 302. Если свет из направляющих устройств 103, 601 является видимым светом, водитель наблюдает два различных цвета света из направляющих устройств 103, 601 в точке 603 и два различных цвета света из направляющих устройств 103, 601 в точке 604.
[0970] Обнаруженная упорядоченная пара длин волн света из направляющих устройств 103, 601 может быть использована посредством процессора 301, например, для того чтобы вычислять позицию транспортного средства 101 относительно краев 501, 502 проезжей части 102. Кроме того, обнаруженные пары длин волн могут быть переданы посредством приемо-передающего устройства 303 в приемное устройство (не показано на фиг. 5), ассоциированное с направляющим устройством 103 или направляющим устройством 601, или и тем, и другим. Передаваемая пара длин волн может быть использована посредством сети освещения для того, чтобы определять позицию транспортного средства 101, и эта информация может предоставляться обратно в транспортное средство 101 или другим получателям (например, работникам аварийно-спасательных служб). Таким образом, продолжая настоящий пример, если передаваемая упорядоченная пара представляет собой (b2, C5), можно определять посредством процессора 301 или посредством сети освещения то, что транспортное средство 101 съехало с проезжей части 102 от края 501. Процессор 301 определяет позицию транспортного средства 101, преобразует ее в координаты местоположения (например, GPS-координаты) и отображает позицию транспортного средства в системе 306 отображения. В этом конкретном случае, процессор 301 может отправлять сигнал оповещения в систему 304 аварийной сигнализации, и визуальный сигнал тревоги или звуковой сигнал тревоги, или и тот, и другой сигнал могут предоставляться для обеспечения преимущества водителю.
ПРИМЕРЫ
[0980] Примеры применения принципов настоящих идей представляются ниже. Эти примеры имеют намерение иллюстрировать различные реализации систем 300, 400 и подробно пояснять определенные преимущества. Эти примеры имеют намерение только иллюстрировать варианты применения настоящих идей и не предоставляются в ограничивающем смысле.
ПРИМЕР I
[0990] Фиг. 7 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. Транспортное средство 101 движется по проезжей части 102 и в идеале между первым краем 701 и вторым краем 702 проезжей части 102. Направляющее устройство 103 предоставляется вдоль второго края 702 проезжей части 102. В этом примере, транспортное средство 101 движется из точки A в точку B на проезжей части 102, как проиллюстрировано на фиг. 7. В точке A свет с первой длиной волны обнаруживается посредством светочувствительного датчика 302 под углом α. В точке B свет со второй длиной волны обнаруживается посредством светочувствительного датчика 302 под углом α+β. Процессор 301 определяет угол β. Угол γ представляет угол между направляющим устройством 103 и направлением движения транспортного средства 101. Процессор 301 затем вычисляет расстояние между точкой A и точкой B и определяет длины OA и OB с использованием треугольной взаимосвязи. Точки OA и OB представляют позицию транспортного средства 101. Процессор 301 определяет позицию транспортного средства 101, преобразует ее в координаты местоположения (например, GPS-координаты) и отображает позицию транспортного средства в системе 306 отображения. Проезжаемое расстояние от A до B известно для транспортного средства посредством использования подхода, аналогичного счетчику пробега: 


ПРИМЕР II
[01000] Фиг. 8 является концептуальным видом транспортных средств 101, 801, которые содержат систему в соответствии с характерным вариантом осуществления. Как показано, транспортное средство 101 движется позади транспортного средства 801 на проезжей части 102. С использованием приемо-передающего устройства 303 транспортное средство 101 передает запрос на позицию транспортного средства 801. Транспортное средство 801 передает свою позицию (например, GPS-координаты), расстояние d1 между транспортным средством 801 и первым направляющим устройством 802, расстояние d2 между транспортным средством 801 и вторым направляющим устройством 803 и углы α и β. Каждое транспортное средство может измерять расстояние d3 между транспортным средством 101 и транспортным средством 801 согласно выражению:
[01010] 
[01020] Если транспортное средство 101 испытывает какие-либо затруднения при приеме света из направляющего устройства 802, процессор 301 может определять позицию транспортного средства 101 относительно краев 804, 805 проезжей части 102 с использованием d1, d2, α, β, d3 и некоторой треугольной взаимосвязи между этими переменными. Расстояние от транспортного средства 101 до правого края 804 проезжей части 102 составляет приблизительно: 

[01030] Любые два смежных луча могут в некоторой степени перекрываться, т.е. некоторые области могут быть покрыты посредством света из двух смежных лучей. Если детектор в транспортном средстве обнаруживает свет из двух смежных лучей направляющего устройства, и эти два луча соответствуют двум углам α1 и α2, соответственно, детектор должен прийти к заключению, что угол задается следующим образом: 

ПРИМЕР III
[01040] Фиг. 9A-9C являются концептуальными видами транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. Иными словами, направляющие устройства 103 предоставляются на обочине с каждой стороны проезжей части 102.
[01050] На фиг. 9A, цвет света, принимаемого в транспортном средстве из каждого из направляющих устройств, является одинаковым. Это указывает то, что транспортное средство 101 находится в центре полосы движения, и, как следствие, регулирование не обязательно должно осуществляться водителем. Обнаружение света может быть визуальным (т.е. водитель видит один цвет из каждого направляющего устройства 103), или он может быть обнаружен посредством детектора (например, детектора 303), предоставляемого в транспортном средстве. Как подробнее описано выше, местоположение транспортного средства в центре полосы движения может предоставляться на дисплее в транспортном средстве 101.
[01060] На фиг. 9B, транспортное средство 101 принимает различный цвет света из каждого направляющего устройства 103. В этом случае, пара цветов указывает то, что транспортное средство находится слева от центра полосы движения. С другой стороны, обнаружение света может быть визуальным (т.е. водитель видит два различных цвета из направляющих устройств 103), или он может быть обнаружен посредством детектора (например, детектора 303), предоставляемого в транспортном средстве. Как подробнее описано выше, местоположение транспортного средства слева от центра полосы движения может предоставляться на дисплее в транспортном средстве 101.
[01070] На фиг. 9C транспортное средство 101 принимает различный цвет света из каждого направляющего устройства 103. В этом случае, пара цветов указывает то, что транспортное средство находится справа от центра полосы движения. С другой стороны, обнаружение света может быть визуальным (т.е. водитель видит два различных цвета из направляющих устройств 103) или может выполняться посредством детектора (например, детектора 303), предоставляемого в транспортном средстве. Как подробнее описано выше, местоположение транспортного средства справа от центра полосы движения может предоставляться на дисплее в транспортном средстве 101.
ПРИМЕР IV
[01080] Фиг. 10 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. Иными словами, направляющее устройство 103 является всенаправленным и содержит один источник света для выбранной угловой ширины в направлении проезжей части 102. Направляющее устройство 103 может быть таким, как описано в связи с вариантами осуществления фиг. 2E и 2F. Направляющее устройство 103 выполнено с возможностью излучать свет, имеющий уникальную характеристику. Например, направляющее устройство 103 может излучать свет, имеющий уникальную длину волны, или свет, имеющий уникальное направление поляризации, или свет, имеющий уникальный код (например, модулированный свет).
[01090] В характерном варианте осуществления направление движения транспортного средства 101, а также первый край 1002 и второй край 1003 проезжей части 102 определяются из GPS-координат. Например, направление движения транспортного средства 101 может быть получено посредством GPS-устройства в транспортном средстве 101 достаточно точно, и первый и второй края 1002, 1003, соответственно, могут сохраняться в дорожной карте в транспортном средстве или передаваться из направляющего устройства 103.
[01100] Как показано на фиг. 10, 
[01110] Направляющее устройство 103 предоставляется вдоль первого края 1002 проезжей части 102. В этом примере, транспортное средство 101 движется из точки A в точку B на проезжей части 102, как проиллюстрировано на фиг. 10. В точке A свет с уникальной характеристикой (например, уникальной длиной волны) обнаруживается посредством светочувствительного датчика 302 под углом α1. В точке B свет с идентичной характеристикой обнаруживается посредством светочувствительного датчика 302 под углом α1+β1. Процессор 301 определяет угол β1. Угол γ1 представляет угол между направляющим устройством 103 и направлением движения транспортного средства 101. Процессор 301 затем вычисляет расстояние между точкой A и точкой B и определяет длины O1A и O1B с использованием треугольной взаимосвязи. Точки O1A и O1B представляют позицию транспортного средства 101. Процессор 301 определяет позицию транспортного средства 101, преобразует ее в координаты местоположения (например, GPS-координаты) и отображает позицию транспортного средства в системе 306 отображения.
Иными словами, 

ПРИМЕР V
[01120] Фиг. 11 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. Иными словами, первое направляющее устройство 103 и второе направляющее устройство 1101 предоставляются на первом крае 1102 проезжей части 102. Первое направляющее устройство 103 является всенаправленным и содержит один источник света для выбранной угловой ширины в направлении проезжей части 102. Первое направляющее устройство 103 и второе направляющее устройство 1101 могут быть такими, как описано в связи с вариантами осуществления фиг. 2E и 2F. Первое направляющее устройство 103 выполнено с возможностью излучать свет, имеющий уникальную характеристику. Второе направляющее устройство 1101 также выполнено с возможностью излучать свет, имеющий уникальную характеристику (отличающуюся от уникальной характеристики света из первого направляющего устройства 103). Например, второе направляющее устройство 1101 может излучать свет, имеющий уникальную длину волны, или свет, имеющий уникальное направление поляризации, или свет, имеющий уникальный код (например, модулированный свет).
[01130] Иными словами, выбранная характеристика первого и второго направляющих устройств 103, 1101, является одинаковой, хотя и уникальной. Например, первое направляющее устройство 103 может быть выполнено с возможностью излучать свет, имеющий первую длину волны, а второе направляющее устройство 1101 может быть выполнено с возможностью излучать свет, имеющий вторую длину волны, которая отличается от первой длины волны. Альтернативно, первое направляющее устройство 103 может быть выполнено с возможностью излучать свет, имеющий первое направление поляризации, а второе направляющее устройство 1101 может быть выполнено с возможностью излучать свет, имеющий второе направление поляризации, которое отличается от первого направления поляризации. Еще альтернативно, первое направляющее устройство 103 может быть выполнено с возможностью излучать свет, имеющий первый код, а второе направляющее устройство 1101 может быть выполнено с возможностью излучать свет, имеющий второй код, который отличается от первого кода.
[01140] Первое направляющее устройство 103 предоставляется вдоль первого края 1102 проезжей части 102. В этом примере, транспортное средство 101 движется из точки A в точку B на проезжей части 102, как проиллюстрировано на фиг. 10. В точке A свет с уникальной характеристикой (например, уникальной длиной волны) из направляющего устройства 103 обнаруживается посредством светочувствительного датчика 302 под углом α1, а свет с уникальной характеристикой (например, уникальной длины волны) из направляющего устройства 1101 обнаруживается посредством светочувствительного датчика 302 под углом α2. В точке B свет с уникальной характеристикой из направляющего устройства 103 обнаруживается посредством светочувствительного датчика 302 под углом β1, а свет с уникальной характеристикой из направляющего устройства 1101 обнаруживается посредством светочувствительного датчика 302 под углом β2.
[01150] С учетом
[01160] Расстояние от направляющего устройства 103 до точек A и B, соответственно, составляет:
[01170] 
[01180] С учетом 
[01190] Расстояние от направляющего устройства 1101 до точек A и B, соответственно, составляет:
[01200] 

[01210] Расстояние между первым направляющим устройством 103 и вторым направляющим устройством 1101 задается следующим образом:
[01220] 
[01230] где 
[01240] Из этого следует, что расстояние от точки A до первого края 1102 проезжей части 102 составляет
[01250] Когда определено расстояние от точек A и B до первого края 1102 проезжей части 102, может быть определена относительная позиция транспортного средства 101 касательно второго края 1103 проезжей части 102. Эта информация может быть использована для того, чтобы определять то, находится транспортное средство 101, как положено, на проезжей части 102, или транспортное средство 101 съехало с проезжей части 102. Вычисления расстояний между транспортным средством 101 и первым краем 1102 проезжей части 102 и определение позиции транспортного средства 101 на проезжей части 102 могут выполняться посредством процессора 301, 401 или процессора сети наружного освещения.
ПРИМЕР VI
[01260] Фиг. 12 является концептуальным видом транспортного средства 101, содержащего систему в соответствии с характерным вариантом осуществления. Иными словами, первое направляющее устройство 103 предоставляется на первом крае 1202, а второе направляющее устройство 1201 предоставляется на втором крае 1203 проезжей части 102. Первое направляющее устройство 103 является всенаправленным и содержит один источник света для выбранной угловой ширины в направлении проезжей части 102. Первое направляющее устройство 103 выполнено с возможностью излучать свет, имеющий уникальную характеристику. Второе направляющее устройство 1201 также является всенаправленным и содержит один источник света для выбранной угловой ширины в направлении проезжей части 102. Первое и второе направляющие устройства 103, 1201 могут быть такими, как описано в связи с вариантами осуществления фиг. 2E и 2F. Второе направляющее устройство 1201 выполнено с возможностью излучать свет, имеющий уникальную характеристику (и, следовательно, отличную от уникальной характеристики света из первого направляющего устройства). Например, второе направляющее устройство 1201 может излучать свет, имеющий уникальную длину волны, или свет, имеющий уникальное направление поляризации, или свет, имеющий уникальный код (например, модулированный свет).
[01270] С учетом 
[01280] в таком случае 
[01290] С учетом
[01300] в таком случае 
[01310] Расстояние между первым направляющим устройством 103 и вторым направляющим устройством 1201 задается следующим образом:
[01320] 
[01330] Если известна ширина 1204 полосы движения и относительное местоположение между первым направляющим устройством 103 и вторым направляющим устройством 1201 в отношении транспортного средства 101 (в этом примере, первое направляющее устройство 103 находится дальше по проезжей части 102 от транспортного средства 101, чем второе направляющее устройство 1201) либо из картографических данных в автомобиле, либо или из информации, передаваемой из первого и второго направляющих устройств 103, 1201, расстояние от транспортного средства 101 до первого края 1202 и расстояние от транспортного средства 101 до второго края в точке A и в точке B может быть определено следующим образом:
[01340] 
[01350] 
[01360] 
[01370] В связи с этим, расстояние от точки A до первого края 1202 проезжей части 102 задается следующим образом:
[01380] Аналогично, расстояние от точки B до первого края 1202 проезжей части 102 задается следующим образом:
[01390] Расстояние от точки A до второго края 1203 проезжей части 102 задается следующим образом 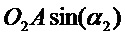
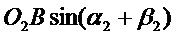
[01400] Когда определяются расстояния от точек A и B до первого края 1202 и второго края 1203 проезжей части 102, может быть определена относительная позиция транспортного средства 101 до любого края проезжей части 102. Эта информация может быть использована для того, чтобы определять то, находится транспортное средство 101, как положено, на проезжей части 102, или транспортное средство 101 съехало с проезжей части 102. Вычисления расстояний между транспортным средством 101 и первым краем 1202 проезжей части 102 и между транспортным средством 101 и вторым краем 1203 проезжей части 102 могут выполняться посредством процессора 301, 401 или процессор сети наружного освещения.
[01410] Системы, устройства и компоненты, описанные в связи с характерными вариантами осуществления, могут быть реализованы с использованием множества компонентов и в вариантах конструктивного исполнения. Более того, различные системы, устройства, компоненты и параметры включены только в качестве примера, а не в каком-либо ограничительном смысле. С учетом этого раскрытия сущности, специалисты в данной области техники могут реализовывать настоящие идеи с использованием собственных систем, устройств, компонентов и параметров, при это оставаясь в пределах объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОЧКИ ДЛЯ ФОТОТЕРАПИИ | 2012 |
|
RU2600223C2 |
| СИСТЕМА ДЛЯ ФОТОТЕРАПИИ, ВКЛЮЧАЮЩАЯ ОПРАВЫ ОЧКОВ И КОНТАКТНЫЕ ЛИНЗЫ | 2012 |
|
RU2580983C2 |
| СИСТЕМА ОСВЕЩЕНИЯ СКОРОСТНЫХ МАГИСТРАЛЕЙ (ВАРИАНТЫ) | 2015 |
|
RU2702298C1 |
| ОПРЕДЕЛЕНИЕ ПОЗИЦИИ УСТРОЙСТВА В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2700281C2 |
| ОБНАРУЖЕНИЕ КОНДЕНСАТА ДЛЯ ПОВЕРХНОСТЕЙ ТРАНСПОРТНОГО СРЕДСТВА ЧЕРЕЗ ПЕРЕДАТЧИКИ И ПРИЁМНИКИ СВЕТА | 2018 |
|
RU2692299C1 |
| БЕСПРОВОДНАЯ СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ ИНДИКАЦИИ ПРОФИЛЯ НА БРЕЛОКЕ ДЛЯ КЛЮЧЕЙ И СООТВЕТСТВУЮЩИЙ БРЕЛОК ДЛЯ КЛЮЧЕЙ | 2017 |
|
RU2699743C2 |
| УСТРОЙСТВО НОЧНОГО ВИДЕНИЯ | 2014 |
|
RU2655997C1 |
| УСТРОЙСТВО ФОТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАНИЯ И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2426195C1 |
| СИСТЕМА И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЗАПРЕЩЕННЫХ ИЛИ ОПАСНЫХ ВЕЩЕСТВ | 2011 |
|
RU2591735C2 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2762627C1 |
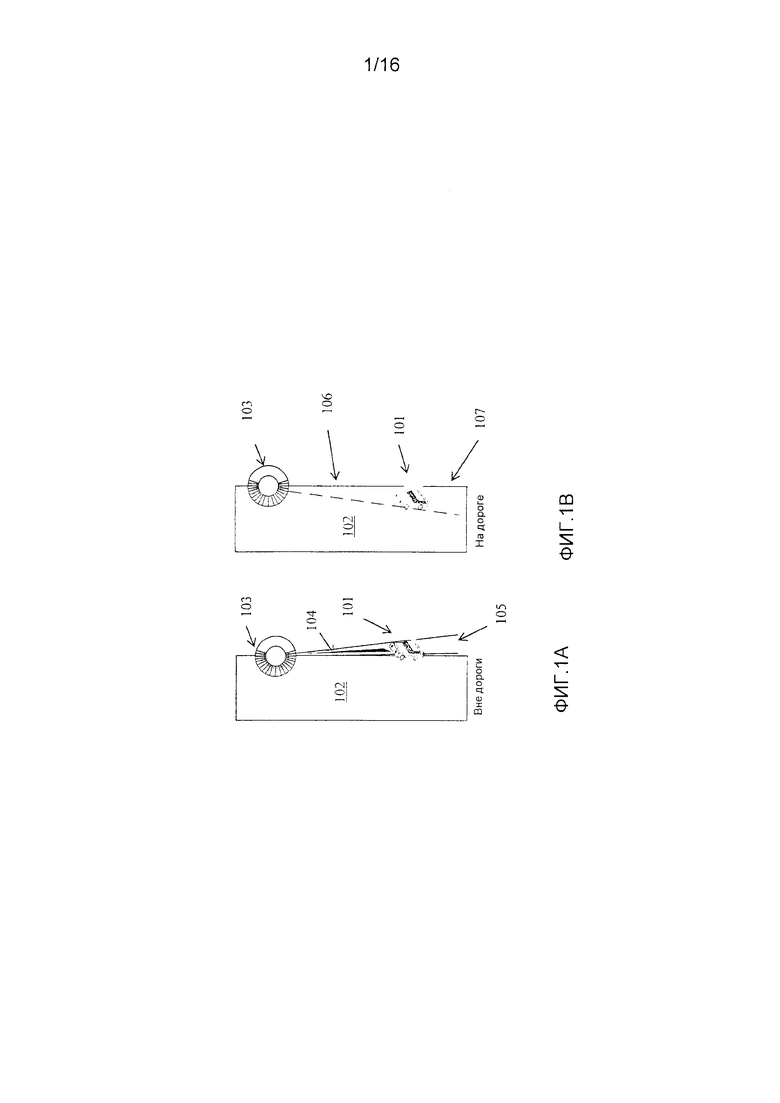
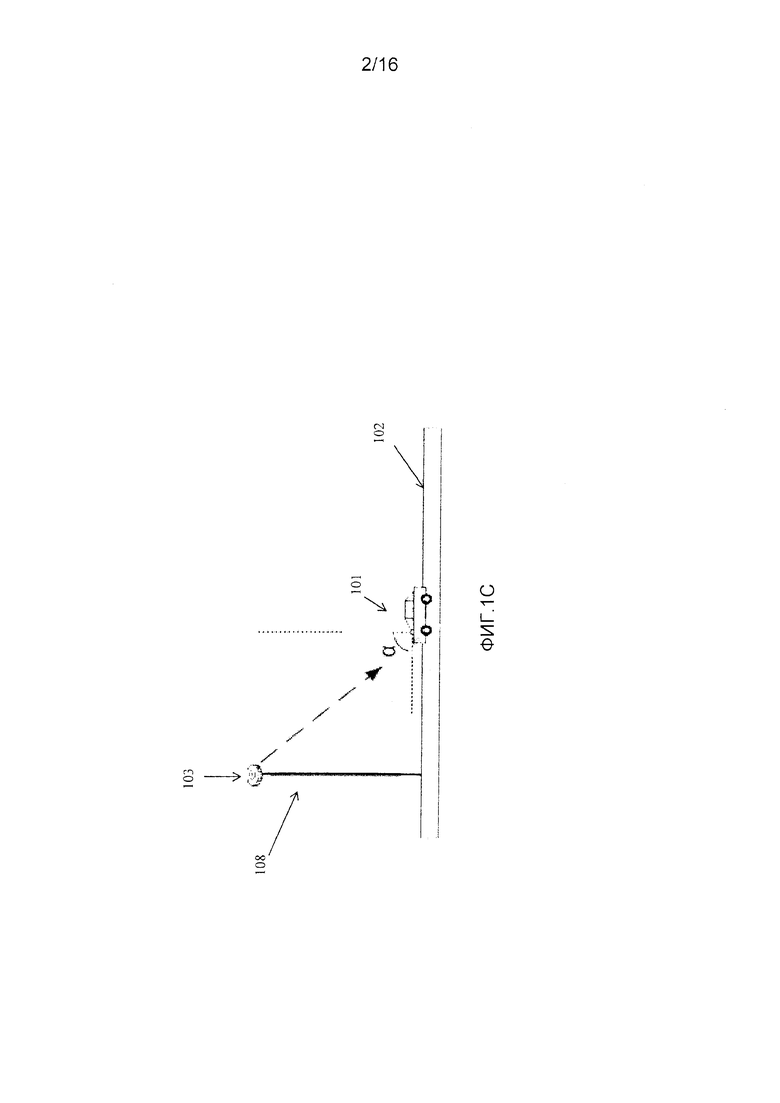
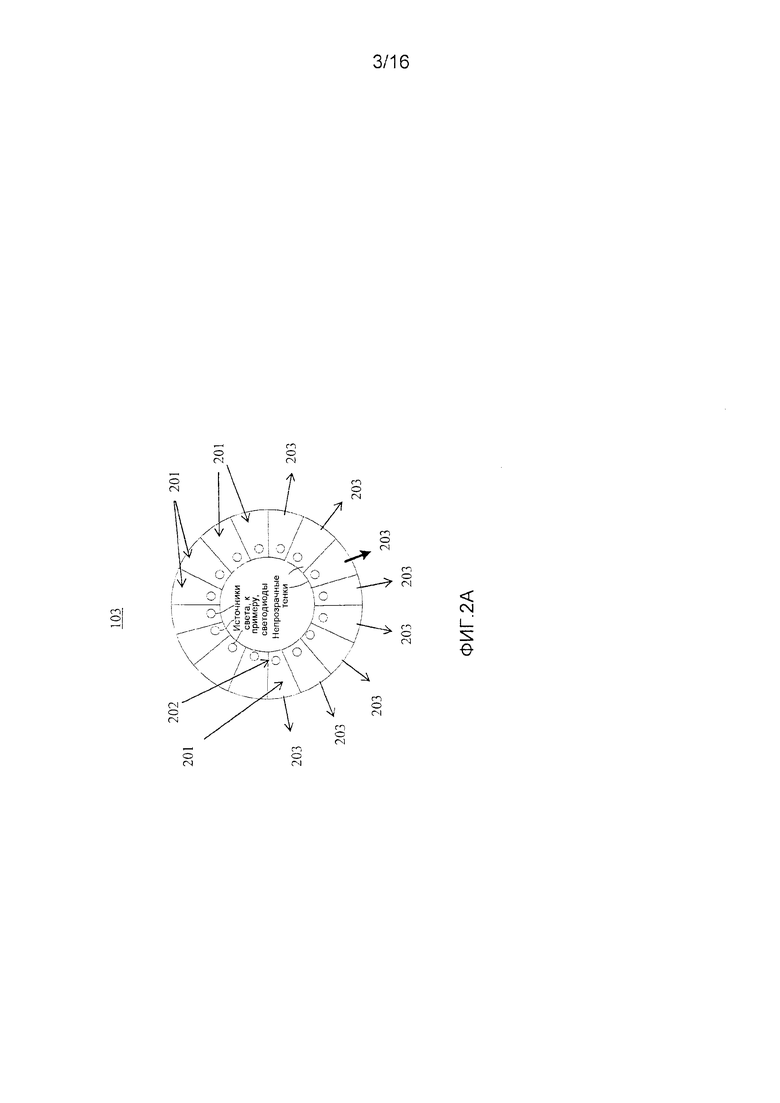
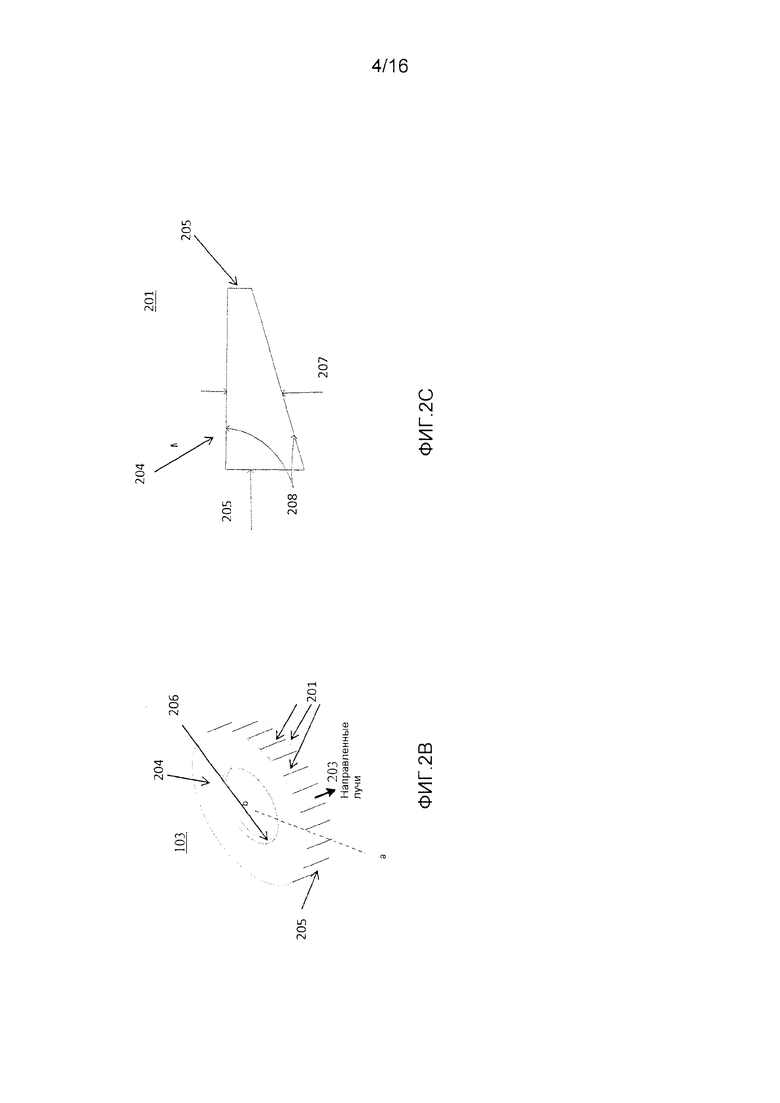
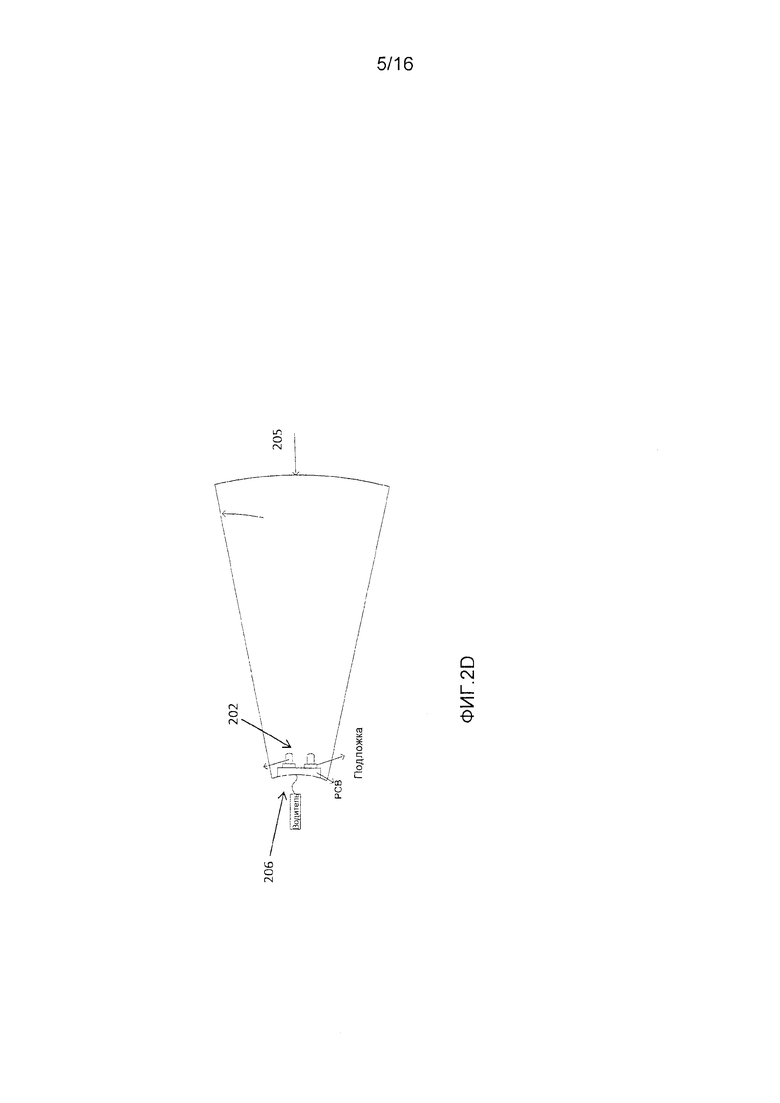
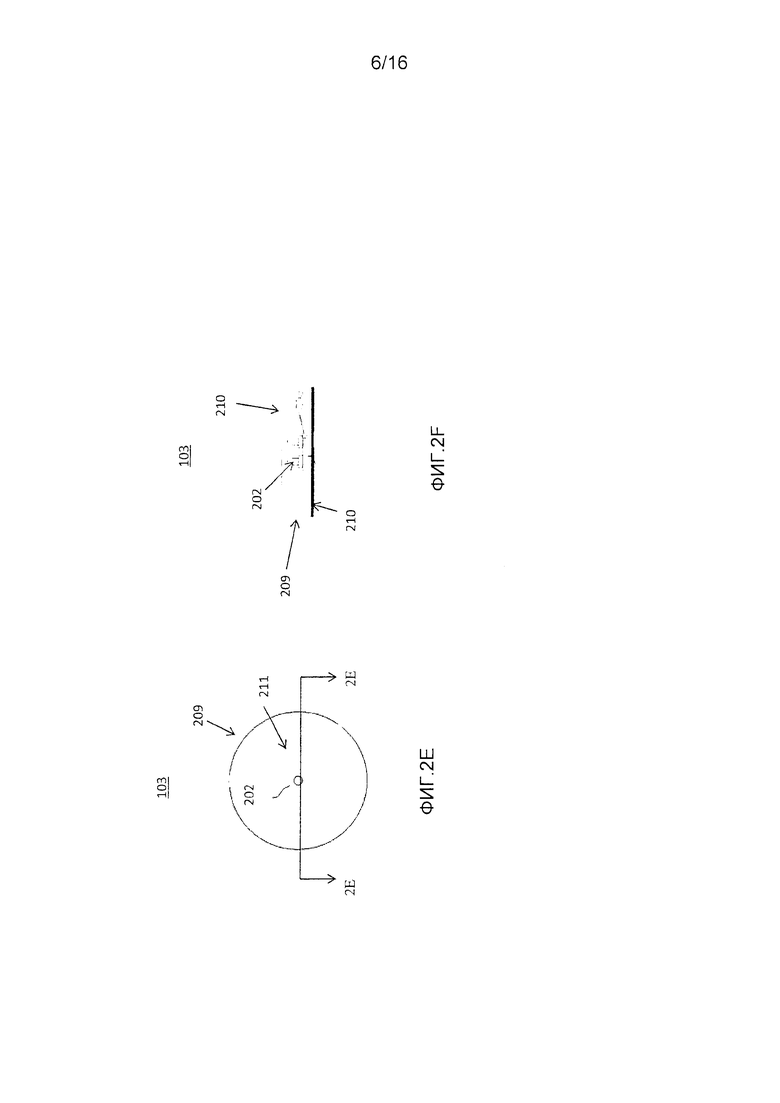


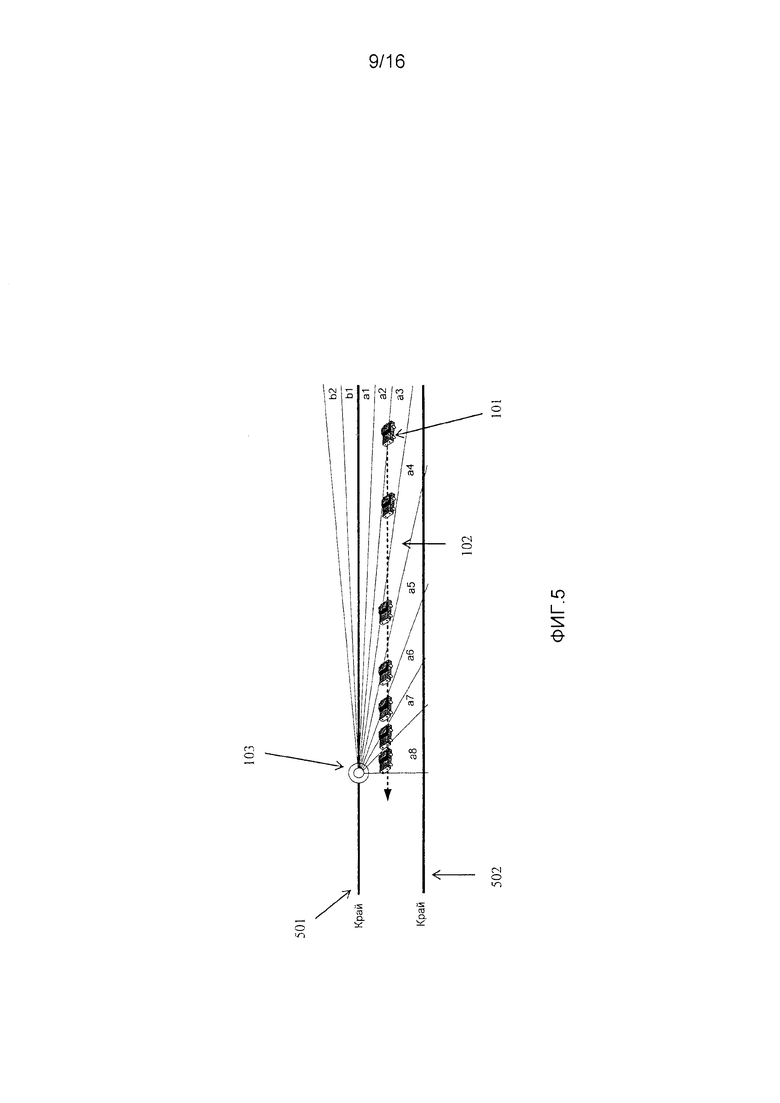

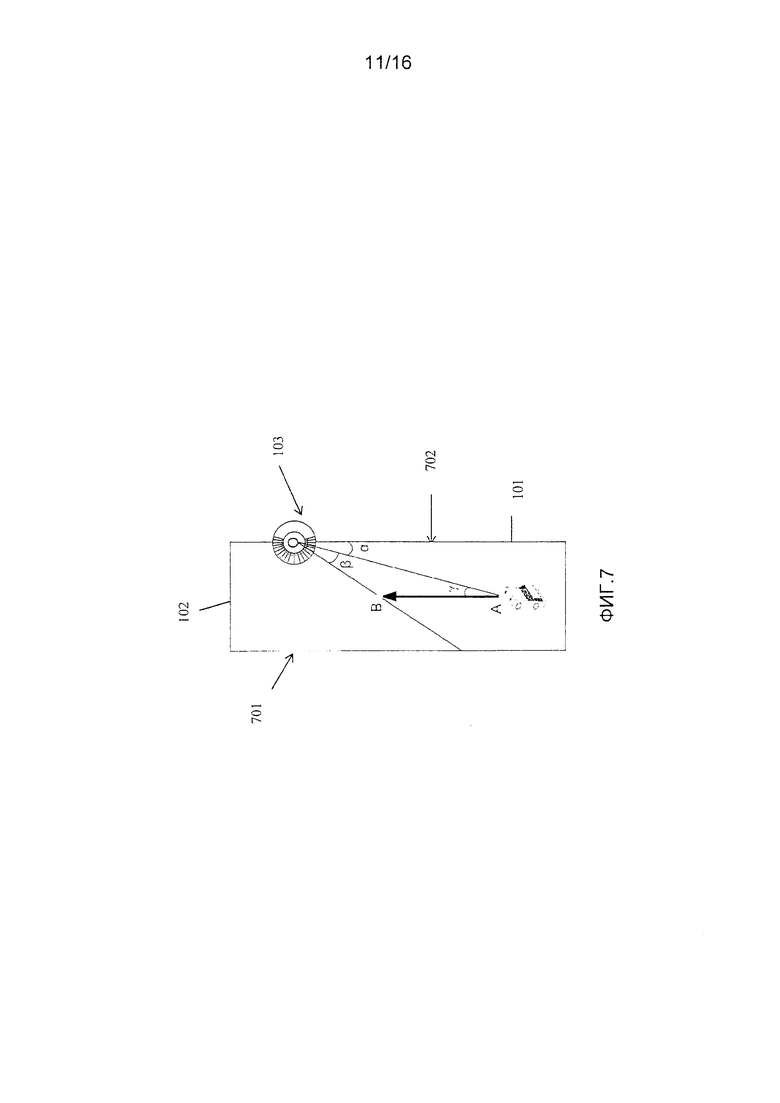
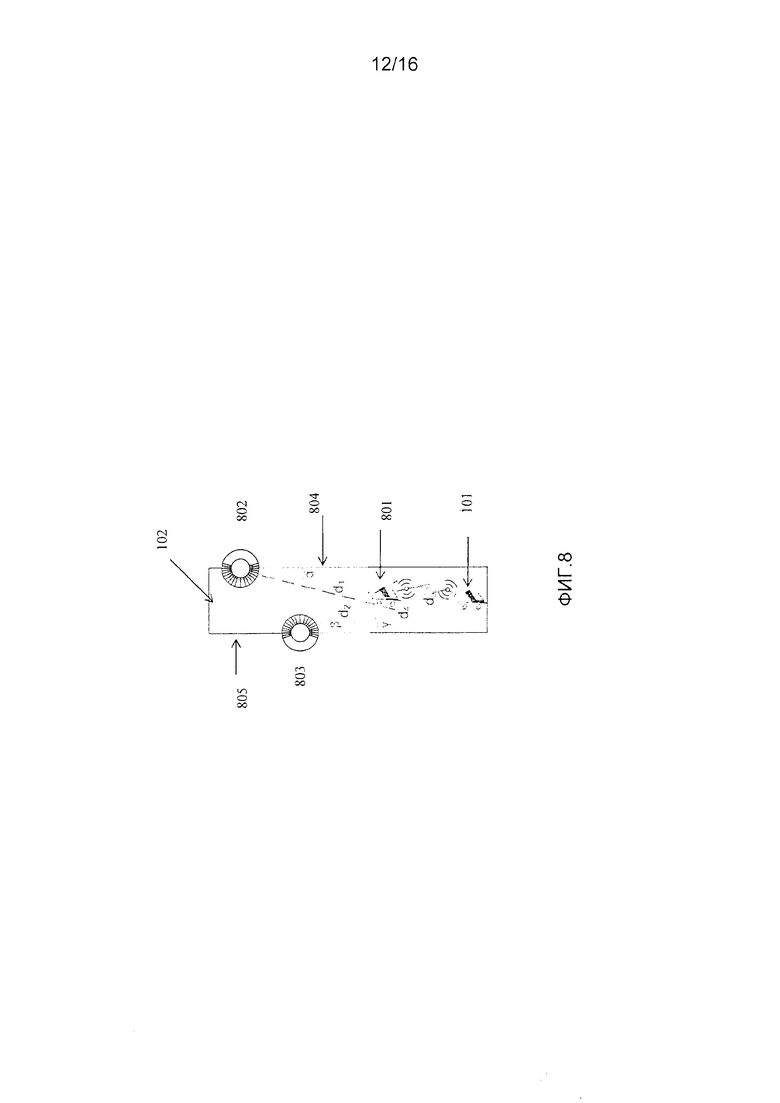
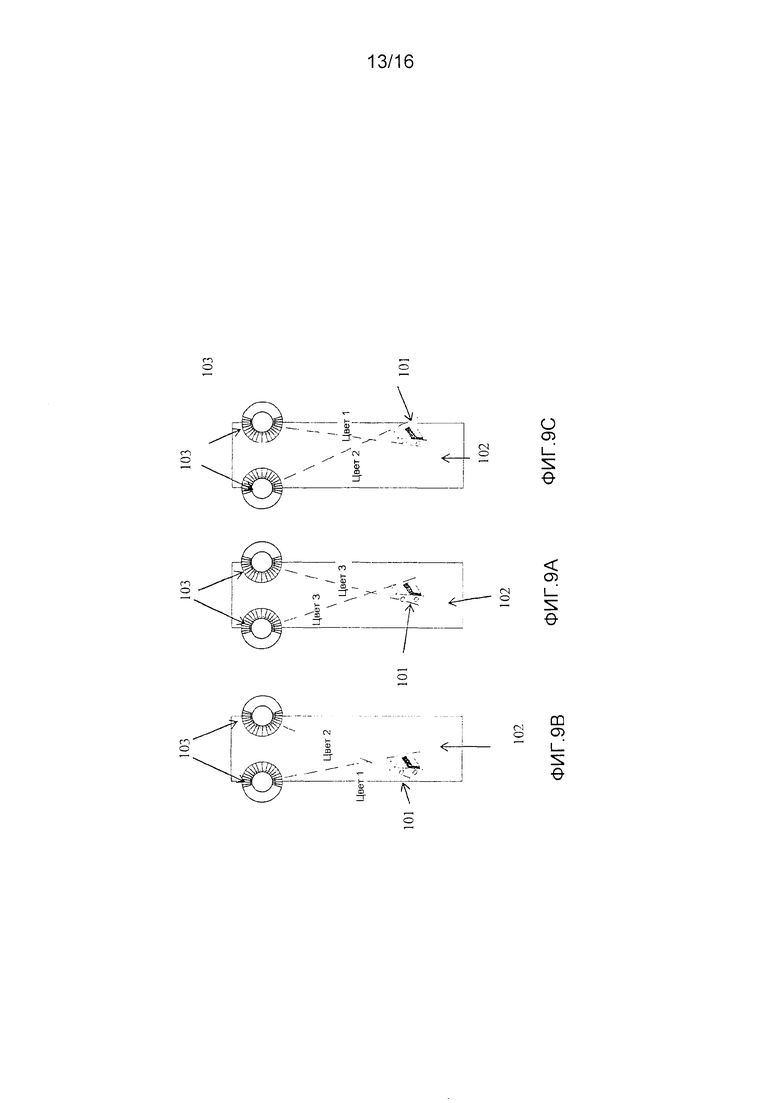
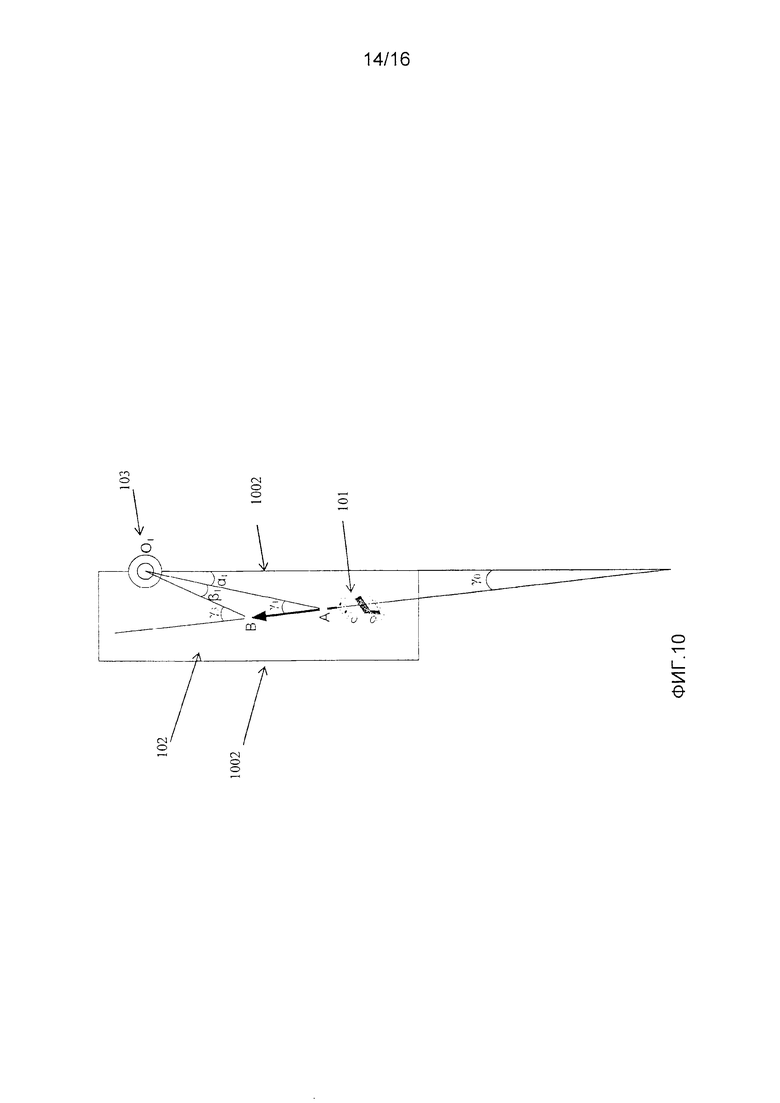
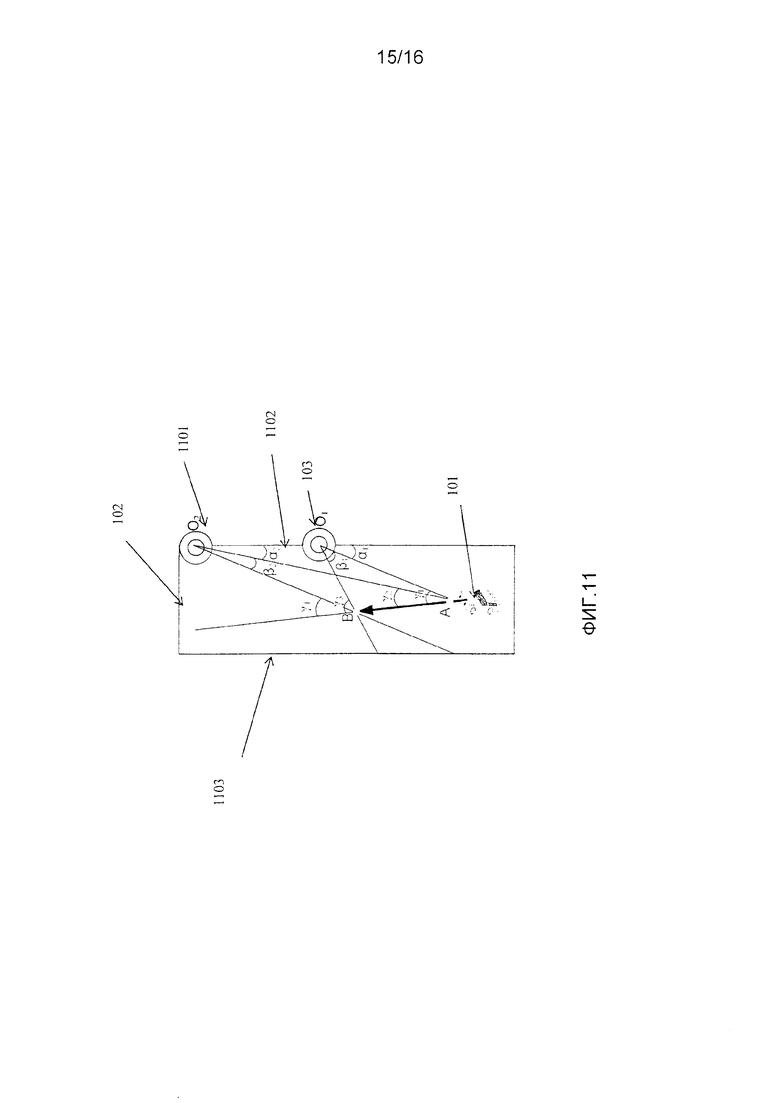

Изобретение относится к позиционированию транспортных средств на проезжей части. Система для направления водителя транспортного средства содержит светочувствительный датчик, выполненный с возможностью принимать и обнаруживать свет из множества источников света и процессор. Каждый источник света имеет световую характеристику, которая отличается от световой характеристики остальных из множества источников света. Процессор выполнен с возможностью определять положение транспортного средства на проезжей части на основе обнаруженных характеристик, полученных из обнаруженного света. Технический результат заключается в обеспечении возможности более точного и быстрого определения позиции транспортного средства на проезжей части. 2 н. и 19 з.п. ф-лы, 12 ил.
1. Система для направления водителя транспортного средства, содержащая: светочувствительный датчик, выполненный с возможностью принимать и обнаруживать свет из множества источников света, причем каждый источник света имеет световую характеристику, которая отличается от световой характеристики остальных из множества источников света; и процессор, выполненный с возможностью определять положение транспортного средства на проезжей части на основе обнаруженных характеристик, полученных из обнаруженного света.
2. Система по п. 1, в которой характеристиками обнаруженного света являются длины волны.
3. Система по п. 1, в которой характеристиками обнаруженного света являются модулирующие коды.
4. Система по п. 3, в которой модулирующие коды обеспечиваются посредством модуляции света.
5. Система по п. 1, в которой характеристиками света являются углы поляризации.
6. Система по п. 1, дополнительно содержащая передающее устройство, выполненное с возможностью испускать и передавать обнаруженный свет.
7. Система по п. 1, дополнительно содержащая передающее устройство, выполненное с возможностью передавать положение транспортного средства.
8. Система по п. 1, дополнительно содержащая приемопередающее устройство, выполненное с возможностью передавать положение транспортного средства из транспортного средства в приемное устройство, находящееся не в транспортном средстве.
9. Система по п. 1, дополнительно содержащая устройство сигнализации, выполненное с возможностью предоставлять водителю положение транспортного средства.
10. Система по п. 1, в которой свет испускается и передается из направляющего устройства.
11. Система по п. 1, в которой свет является отраженным.
12. Система по п. 10, в которой длины волн обнаруженного света зависят от угла между транспортным средством и направляющим устройством.
13. Система по п. 3, в которой модулирующие коды обнаруженного света зависят от угла между транспортным средством и направляющим устройством, которое испускает и передает свет.
14. Система по п. 5, в которой углы поляризации обнаруженного света зависят от угла между транспортным средством и направляющим устройством, которое испускает и передает свет.
15. Система по п. 1, дополнительно содержащая запоминающее устройство, содержащее местоположение направляющего устройства на проезжей части.
16. Способ направления водителя транспортного средства, выполняемый в системе, содержащей светочувствительный датчик и процессор, при этом способ содержит этапы, на которых: в светочувствительном датчике принимают свет из множества источников света, причем каждый источник света имеет световую характеристику, которая отличается от световой характеристики остальных из множества источников света, и определяют характеристики принимаемого света; и посредством процессора определяют, на основе этих определенных характеристик света, положение транспортного средства на проезжей части.
17. Способ по п. 16, в которой характеристиками обнаруженного света являются длины волны.
18. Способ по п. 16, в которой характеристиками обнаруженного света являются модулирующие коды.
19. Способ по п. 18, в котором модулирующие коды обеспечиваются посредством модуляции света.
20. Способ по п. 16, в котором характеристиками света являются углы поляризации.
21. Способ по п. 16, дополнительно содержащий, после упомянутого определения, этап, на котором передают положение транспортного средства.
| US 2008243378 A1, 02.10.2008 | |||
| RU 2000104192 A, 27.01.2002 | |||
| US 2010191418 A1, 29.06.2010 | |||
| US 5731766 A, 24.03.1998 | |||
| Способ усиления металлических мостов | 1932 |
|
SU33554A1 |

