Изобретение относится к способу и предназначено для применения в области авиационного приборостроения, в частности, в навигационно-пилотажном оборудовании летательных аппаратов (ЛА).
Известны способы и бортовые системы ЛА, реализующие полет ЛА по маршруту. Различные аспекты функционирования бортового оборудования ЛА при полете по маршруту, а также описание некоторых из систем, реализующих процедуры подготовки к полету ЛА по маршруту и обеспечивающих управление ЛА при полете по маршруту, приведены в следующих работах:
1. Батенко А.П. Управление конечным состоянием движущихся объектов, М.: Советское радио, 1977. 256.
2. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984. 256.
3. Система планирования и подготовки полетных заданий тактической группы самолетов. Патент РФ на изобретение №2147141. ОАО "РПКБ", 1999.
4. Способ автоматического управления ЛА при выходе на линию взлетно-посадочной полосы. Патент РФ на изобретение №2240589. ОАО "РПКБ", 2003.
5. Комплексная система подготовки и навигации ЛА. Патент РФ на изобретение №2434202. ОАО "РПКБ", 2010.
6. Устройство управления траекторией ЛА при полете по маршруту. Патент РФ на изобретение №2444044. ОАО "РПКБ", 2010.
7. Способ управления траекторией ЛА при полете по маршруту. Патент РФ на изобретение №2444775. ОАО "РПКБ", 2010.
8. Способ управления ЛА при возврате на корабль. Патент РФ на изобретение №2450312. ОАО "РПКБ", 2011.
9. Комплексная система навигации и управления ЛА. Патент РФ на изобретение №2481558. ОАО "РПКБ", 2011.
10. Усовершенствованная система планирования полетного задания. Сб. "Новости зарубежной науки и техники", ГОСНИИАС, №11, 1992, с. 11-15.
11. Рогожин В.О. и др. Пилотажно-навигационные комплексы воздушных судов (на украинском языке), К.: НАУ, 2005. 316.
В работах [1, 2, 11] описаны различные теоретические и практические аспекты управления ЛА при полете по маршруту. В патенте [3] и работе [10] описаны наземные системы подготовки полетного задания (СППЗ) для ЛА. В патентах [4, 7, 8] описаны способы управления траекторией полета ЛА по маршруту, а в патентах [5, 6, 9] описаны бортовые системы, обеспечивающие полет ЛА по маршруту.
Одной из функций СППЗ является планирование и построение маршрута полета ЛА из исходного пункта маршрута в конечный пункт маршрута в виде последовательности заданных координатами и высотой пролета геодезических навигационных точек, соединенных пространственными прямолинейными траекториями. Параметры этого маршрута могут передаваться на борт ЛА при подготовке к вылету посредством переносного носителя данных или по соответствующим каналам информационного взаимодействия наземной и бортовой аппаратуры. Параметры маршрута могут также формироваться экипажем и непосредственно на борту ЛА с помощью соответствующих бортовых информационно-управляющих систем, например специализированных или многофункциональных пультов-индикаторов, или передаваться на борт ЛА по соответствующим каналам связи непосредственно в процессе полета.
Учитывая цели и особенности объекта предполагаемого изобретения, а также для большей общности, в дальнейшем тексте заявки не будет акцентироваться внимание на методах формирования маршрута полета и типе оборудования,
с помощью которого он формируется и попадает в бортовые базы данных ЛА.
В патенте [7] описан способ, обеспечивающий выработку заданного курса для полета по маршруту, при котором линии заданного полета (ЛЗП) представляют собой прямые, соединяющие НТ в маршруте. В патенте [4] описан способ, обеспечивающий выход на НТ в маршруте с заранее заданного направления на заранее заданной дальности.
С учетом целей предлагаемого изобретения считаем, что наиболее близким к нему по технической сущности является способ формирования полетной траектории ЛА, описанный одновременно в книгах [2] (главы 6 и 7), [11] (глава 5, разделы 7.8, 7.9 и 8.1) и патенте [7]. С учетом только существенных для предлагаемого изобретения признаков данный способ выбирается в качестве прототипа.
Указанный способ формирования полетной траектории ЛА включает загрузку из бортовой базы данных и наложение на электронную карту местности маршрута полета в виде последовательности заданных координатами местоположения навигационных точек (НТ), соединение НТ прямолинейными траекториями (ПТ) и формирование заданного курса, обеспечивающего движение ЛА по полетной траектории.
Как показывает практика эксплуатации современных ЛА, построение маршрута, состоящего только из прямолинейных траекторий, не всегда и не в полной мере соответствует требованиям по безопасности выполнения полетов. Во многих случаях, например при полете на малой высоте в горных условиях или выполнении посадки/взлета на/с аэродром/а вблизи городских агломераций, единственно возможная траектория полета ЛА имеет сложную геометрическую форму.
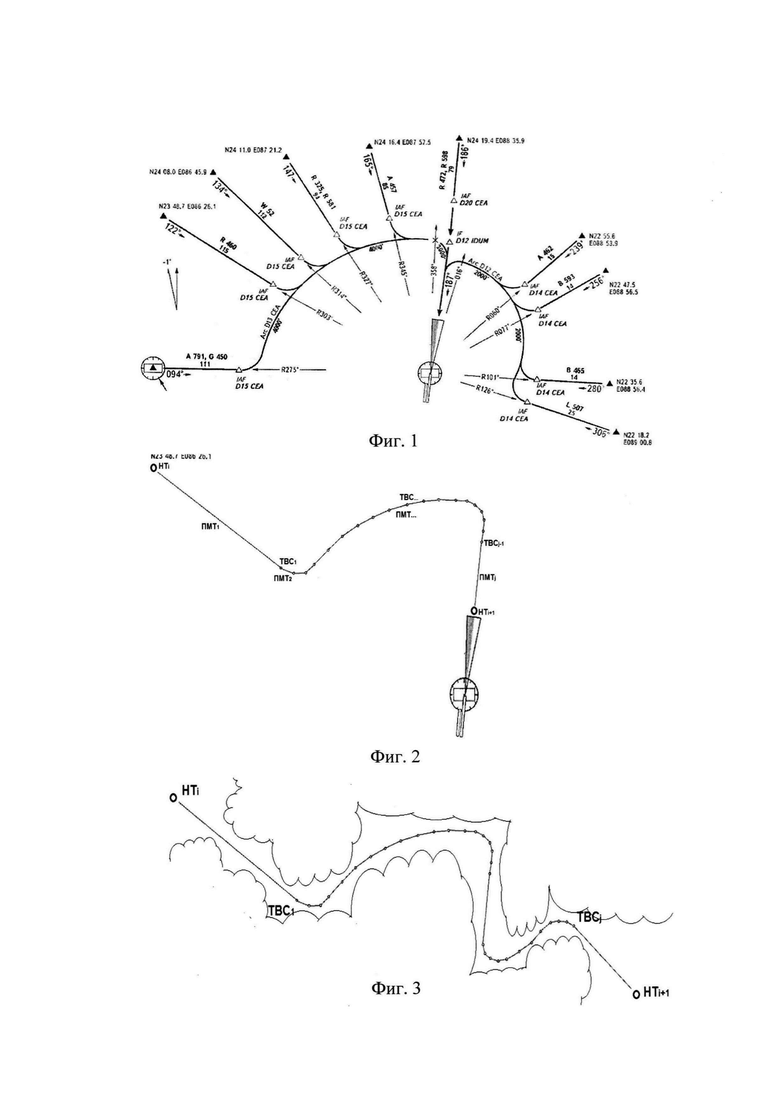
В качестве примера фиг. 1 иллюстрирует геометрическую схему возможных траекторий полета в горизонтальной плоскости при выполнении захода на посадку на одну из взлетно-посадочных полос (ВПП) аэропорта Колката (Индия), которая регламентирована соответствующими документами по управлению полетами в зоне этого аэропорта.
Полеты по таким траекториям в настоящее время осуществляются, как правило, в ручном режиме под контролем диспетчера соответствующего центра по управлению полетами с использованием информации от угломерно-дальномерных радиотехнических навигационных систем типа VOR/DME.
Целью предлагаемого изобретения является расширение функциональных возможностей ЛА за счет повышения степени автоматизации процессов управления ЛА при полете по траектории, имеющей сложную геометрическую форму.
Достижение поставленной цели в предлагаемом изобретении предлагается путем включения в маршрут полета траекторий произвольной геометрической формы (ТПФ) с последующей декомпозицией ТПФ на несколько взаимосоединенных прямолинейных микротраекторий (ПМТ), количество которых, а также их длину и направление определяют из условия нахождения точек взаимосоединения ПМТ непосредственно на исходной ТПФ, а также из условия о предельно допустимом боковом отклонении ЛА от исходной ТПФ
С учетом только значимых для изобретения признаков достижение указанной цели обеспечивается тем, что в предлагаемом способе формирования полетной траектории ЛА, включающем загрузку из бортовой базы данных и наложение на электронную карту местности маршрута полета в виде последовательности заданных координатами местоположения навигационных точек (НТ), соединение НТ прямолинейными траекториями (ПТ) и формирование заданного курса, обеспечивающего движение ЛА по полетной траектории, НТ, образующие основной маршрут полета, при необходимости, соединяют между собой на электронной карте местности траекториями произвольной формы (ТПФ), графический профиль которых задают в привязке к электронной карте местности таким образом, чтобы они, с учетом динамических свойств летательного аппарата и его систем автоматического управления, имели плавный и безопасный характер, производят декомпозицию ТПФ на несколько взаимосоединенных прямолинейных микротраекторий (ПМТ), количество которых, а также их длину и направление определяют из условия нахождения точек взаимосоединения (ТВС) ПМТ непосредственно на ТПФ, а также из условия о предельно допустимом боковом отклонении ЛА от ТПФ, определяют координаты местоположения каждой из ТВС ПМТ, запоминают ТВС ПМТ в бортовой базе данных в качестве дополнительных НТ, а затем, в полете по ТПФ, при формировании заданного курса используют вновь запомненные дополнительные НТ в качестве точек, эквивалентных по свойствам НТ образующим основной маршрут полета.
На фигурах 2 и 3 представлены чертежи, иллюстрирующие предлагаемый способ. Чертежи иллюстрируют геометрические схемы декомпозиции ТПФ, соединяющие две НТ из маршрута полета, на несколько ПМТ.
На фиг. 2 проиллюстрирована декомпозиция траектории входа в зону аэропорта Колката с направления 122°. В качестве HTi используется геодезическая точка входа в зону аэропорта. В качестве следующей точки HTi+1 используется геодезическая точка, в которой должно происходить переключение бортовых систем индикации и управления ЛА в режим ПОСАДКА по данным от радиотехнической посадочной системы ILS.
На фиг. 3 проиллюстрирована декомпозиция траектории ЛА при облете горных препятствий.
Декомпозиция исходной траектории сложной геометрической формы на несколько прямолинейных микротраекторий может быть осуществлена путем наложения графического образа исходной траектории на изображение карты местности, выбором, с учетом соответствующих критериев, точек взаимосоединения микротраекторий и "скалыванием" с изображения карты местности координат этих точек.
Известно, что основной целью полета ЛА по маршруту является пролет всего маршрута с максимально возможной точностью, т.е. обеспечение на всем маршруте минимального отклонения ЛА от заданной траектории. Как видно из фиг. 2 и 3, в предлагаемом изобретении, при декомпозиции ТПФ на ПМТ, осуществляется учет меняющейся кривизны ТПФ. В результате, текущее отклонение ПМТ от ТПФ не превышает заданного значения бокового отклонения ЛА от ТПФ.
Пример реализации предлагаемого способа может быть описан следующим образом.
Оператор СППЗ на основе целевого задания на полет, с учетом динамических свойств ЛА и его систем автоматического управления в процессе интерактивного взаимодействии с соответствующими устройствами СППЗ формирует графический образ ТПФ, соединяющей две "стандартные" навигационные точки из маршрута полета.
Эта процедура может выполняться оператором путем рисования ТПФ на электронной карте местности. В некоторых случаях, например при построении траектории посадки или взлета, в качестве графического образа ТПФ могут использоваться заранее подготовленные графические шаблоны.
Сформированный графический образ ТПФ в составе общего полетного задания поступает на борт ЛА и запоминается в бортовой базе данных.
На борту ЛА, при необходимости осуществления полета по ТПФ, экипаж вызывает из бортовой базы данных на электронный индикатор карту соответствующей местности и накладывает на нее графический образ ТПФ, а затем в режиме интерактивного взаимодействия с соответствующим бортовым оборудованием производит декомпозицию ТПФ на несколько ПМТ переменной длины. Координаты точек взаимного соединения ПМТ запоминаются в бортовой базе данных для дальнейшего использования в качестве "стандартных" НТ.
В простейшем случае декомпозиция графического образа ТПФ может быть произведена членом экипажа путем выбора, с учетом соответствующих критериев, точек взаимосоединения ПМТ и "скалыванием" с изображения карты местности на электронном индикаторе координат этих точек.
Таким образом, на примерах реализации показано достижение технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2820582C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И КОРРЕКТИРОВКИ ПОЛЕТНЫХ ЗАДАНИЙ, НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2747760C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
.
Изобретение относится к способу формирования полетной траектории летательного аппарата (ЛА). Для формирования траектории загружают из бортовой базы данных и накладывают на электронную карту местности маршрут полета в виде последовательности заданных координатами местоположения навигационных точек (HT), соединяют НТ прямолинейными траекториями, формируют заданный курс, при необходимости соединяют НТ между собой траекториями произвольной формы (ТПФ) определенным образом, производят декомпозицию ТПФ на несколько взаимосвязанных прямолинейных микротраекторий (ПМТ) определенным образом, определяют координаты местоположения каждой из точек взаимосоединения (ТВС) ПМТ, запоминают ТВС ПМТ в бортовой базе данных в качестве дополнительных НТ, используют их в дальнейшем как эквивалентные основным НТ. Обеспечивается повышение автоматизации процессов управления ЛА при полете по траектории сложной геометрической формы. 3 ил.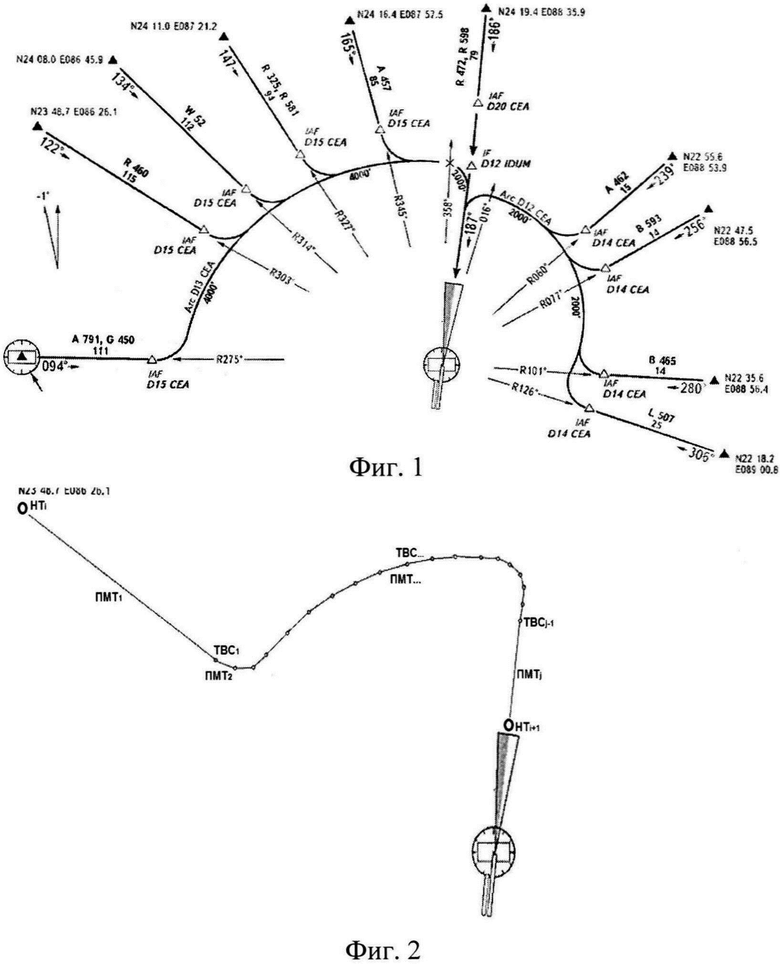
Способ формирования полетной траектории летательного аппарата (ЛА), включающий загрузку из бортовой базы данных и наложение на электронную карту местности маршрута полета в виде последовательности заданных координатами местоположения навигационных точек (НТ), соединение НТ прямолинейными траекториями (ПТ) и формирование заданного курса, обеспечивающего движение ЛА по полетной траектории, отличающийся тем, что НТ, образующие основной маршрут полета, при необходимости соединяют между собой на электронной карте местности траекториями произвольной формы (ТПФ), графический профиль которых задают в привязке к электронной карте местности таким образом, чтобы они, с учетом динамических свойств летательного аппарата и его систем автоматического управления, имели плавный и безопасный характер, производят декомпозицию ТПФ на несколько взаимосоединенных прямолинейных микротраекторий (ПМТ), количество которых, а также их длину и направление определяют из условия нахождения точек взаимосоединения (ТВС) ПМТ непосредственно на ТПФ, а также из условия о предельно допустимом боковом отклонении ЛА от ТПФ, определяют координаты местоположения каждой из ТВС ПМТ, запоминают ТВС ПМТ в бортовой базе данных в качестве дополнительных НТ, а затем, в полете по ТПФ, при формировании заданного курса используют вновь запомненные дополнительные НТ в качестве точек эквивалентных по свойствам НТ, образующим основной маршрут полета.
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ ПО МАРШРУТУ | 2010 |
|
RU2444775C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| US 6314341 B1, 06.11.2001 | |||
| US 20140316616 A1, 23.10.2014. | |||

