Изобретение относится к области авиационного приборостроения.
Известны способы и системы планирования применения, подготовки полетных заданий, навигации и управления отдельными летательными аппаратами (ЛА) и группами ЛА, реализующие их полет по различным маршрутам. Принципы функционирования бортового оборудования ЛА при полете по маршруту, а также описание некоторых из систем, реализующих процедуры планирования применения групп ЛА, подготовки полетных заданий ЛА для полета по маршруту и обеспечивающих управление ЛА при полете по маршруту, приведены в источниках информации.
В работах [1, 2] описаны различные теоретические и практические аспекты управления Л А при полете по маршруту. В патентах [3, 8] и работах [7, 9] описаны наземные системы подготовки полетных заданий (ППЗ) для ЛА и системы планирования применения (ПП) ЛА и групп ЛА. В патентах [4, 5, 6] описаны бортовые системы, обеспечивающие полет ЛА по маршруту в соответствии с полетным заданием (ПЗ).
В патенте [3] представлена блок-схема системы, предназначенной для планирования полетных заданий группе летательных аппаратов. Одной из функций рабочего места оператора (РМО) описанной системы планирования полетных заданий является построение маршрута полета ЛА из исходного пункта маршрута в конечный пункт маршрута в виде последовательности заданных координатами геодезических навигационных точек (НТ), соединенных пространственными прямолинейными траекториями. Параметры этого маршрута могут передаваться на борт ЛА при подготовке к вылету посредством переносного носителя данных НПЗ или по соответствующим каналам информационного взаимодействия наземной и бортовой аппаратуры. На НПЗ может быть записано несколько ПЗ с различными маршрутами, что обеспечивает, например, возможность выхода в различные области интереса, осуществления посадки на различные аэродромы, а также обход зон, запрещенных для пролета. Учитывая цели предлагаемого изобретения, а также для большей определенности, в дальнейшем тексте заявки считается, что основным оборудованием, с помощью которого формируется и попадает в бортовые базы данных ЛА маршрут полета, являются РМО ППЗ и НПЗ.
Недостатком описанной системы планирования полетных заданий группе летательных аппаратов является отсутствие в ней элементов, автоматизирующих разработку общего замысла действий группы и организацию взаимодействия отдельных летательных аппаратов, поскольку РМО ППЗ функционируют независимо друг от друга с последующей визуализацией проложенных маршрутов на ЭКП 10.
Наиболее близким к предлагаемой комплексной системе планирования применения и подготовки полетных заданий группе летательных аппаратов по технической сущности является устройство, описанное в патенте [8], которое выбирается в качестве прототипа с учетом только существенных для предлагаемого изобретения признаков.
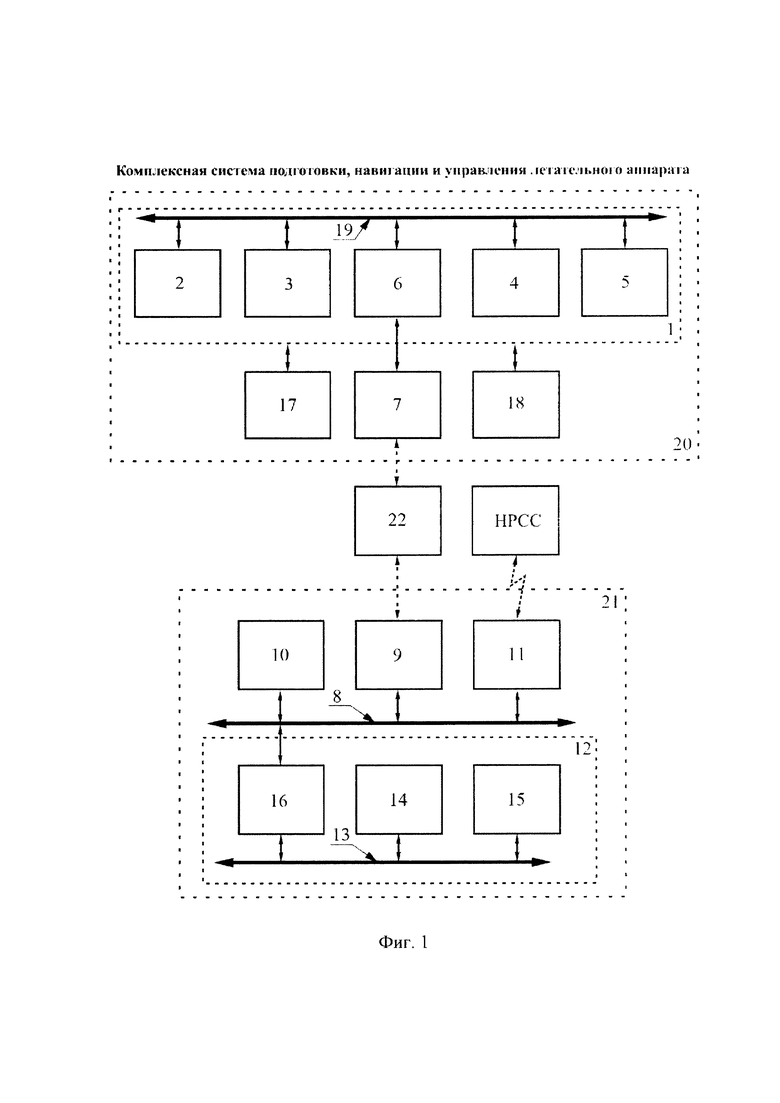
Устройство-прототип состоит из РМО подготовки полетного задания и бортового навигационного комплекса, связь между которыми осуществляется посредством НПЗ, причем РМО ППЗ состоит из универсального устройства записи информации на НПЗ, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-вы ходами с электронным блоком, включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена вычислительно-логический функциональный модуль (ВЛФМ) базы данных картографической информации, ВЛФМ базы данных аэронавигационной информации, ВЛФМ интерактивного формирования маршрута полета, ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на НПЗ, а НК состоит из взаимосоединенных входами-выходами по каналу информационного обмена устройства считывания информации с ПНД, комплекта навигационно-пилотажных систем, бортовой радиотехнической системы связи и бортовой цифровой вычислительной системы, включающей взаимосоединенные входами-выходами по бортовой магистрали информационного обмена ВЛФМ объединенной базы данных, ВЛФМ формирования управляющих сигналов, ВЛФМ ввода-вывода и управления информационным обменом.
На фиг. 1 представлена блок-схема устройства-прототипа, на которой обозначены:
1 - электронный блок (ЭБ);
2 - ВЛФМ базы данных картографической информации (БДКИ);
3 - ВЛФМ базы данных аэронавигационной информации (БДАНИ);
4 - ВЛФМ интерактивного формирования маршрута полета ЛА (ИФМП);
5 - ВЛФМ формирования полетного задания (ФПЗ);
6 - ВЛФМ записи полетного задания на НПЗ (ЗПЗ);
7 - универсальное устройство записи информации на НПЗ (УЗ);
8 - канал информационного обмена (КИО);
9 - устройство считывания информации с НПЗ (УС);
10 - комплект навигационных систем (НС);
11 - бортовая радиотехническая система связи (БРСС);
12 - бортовая цифровая вычислительная система (БЦВС);
13 - бортовая магистраль информационного обмена (БМИО);
14 - ВЛФМ объединенной базы данных (ОБД);
15 - ВЛФМ формирования управляющих сигналов (ФУС);
16 - ВЛФМ ввода-вывода и управления информационным обменом (ВВУИО);
17 - универсальный видеомонитор (ВМ);
18 - комплект универсальных устройств управления (УУ);
19 - универсальная магистраль информационного обмена (УМИО);
20- рабочее место оператора подготовки полетных заданий (РМО ППЗ);
21 - навигационный комплекс (НК);
22 - носитель полетного задания (НПЗ).
Пунктирные связи на чертеже между блоками 7-22-9 обозначают процедуру перемещения НПЗ 3 из наземного УЗ 7 в бортовое УС 9 и обратно. Кроме этого, на чертеже обозначена пунктиром непронумерованная и не входящая в состав устройства наземная радиотехническая система связи (НРСС), в которой предусмотрена возможность получения и передачи на борт ЛА кодированной информации для корректировки ПЗ.
Система-прототип функционирует следующим образом.
РМО ППЗ 20, которое представляет собой наземную часть устройства, обеспечивает подготовку ПЗ, в том числе построение пространственно-временного графика полета ЛА, а также производит инженерно-штурманский расчет с определением потребного запаса топлива. РМО ППЗ 20 содержит комплект универсальных УУ 18 (клавиатура, манипуляторы различного типа), универсальный ВМ 17, универсальное устройство записи информации на ПНД 7 и электронный блок 1, который включает в себя взаимосвязанные по УМИО 19 ВЛФМ БДКИ 2, ВЛФМ БДАНИ 3, ВЛФМ ФПЗ 5, ВЛФМ ИФПЗ 4 и ВЛФМ ЗПЗ 6. Электронный блок 1 является вычислительной системой, при этом все входящие в его состав ВЛФМ исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
Процедура подготовки ПЗ, в том числе построение пространственно-временного графика полета, а также определение потребного запаса топлива на полет осуществляется оператором путем интерактивного взаимодействия с ВЛФМ БДКИ 2 и ВЛФМ БДАНИ 3 из состава ЭБ 1 посредством УУ 18 и ВМ 17. Параметры маршрута и величина потребного запаса топлива в составе ПЗ передаются в бортовую часть устройства при подготовке к вылету посредством НПЗ 22, представляющего собой модуль с долговременной перепрограммируемой памятью (типа флэш-карт).
Информационная взаимосвязь всего оборудования НК21, который является бортовой частью устройства, осуществляется по КИО 8, включающему электрические, механические, электромеханические связи.
Введенное в НПЗ 22 полетное задание ЛА - исходные данные для бортового оборудования, параметры навигационных точек (НТ) на маршруте, параметры возможных аэродромов базирования и другие данные - через УС 9 и КИО 8 поступают на вход БЦВС 12, а затем через БМИО 13 и ВЛФМ ВВУИО 16 в ВЛФМ ОБД 14.
Комплект НС 10 включает инерциальные навигационные системы, спутниковые навигационные системы, системы воздушных сигналов и другие системы, измеряющие параметры полета ЛА, которые с входа-выхода НС 10 через КИО 8 поступают на вход-выход БЦВС 12 и через БМИО 13 и ВЛФМ ВВУИО 16 в ВЛФМ ФУС 15.
БРСС 11 обеспечивает обмен информацией между наземными пунктами управления и ЛА, в том числе данными, позволяющими, при необходимости, оперативно изменять маршрут ЛА.
БЦВС 12 является вычислительной системой, при этом все ВЛФМ, входящие в ее состав, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
ВЛФМ ВВУИО 16 через вход-выход осуществляет прием, преобразование и передачу данных во взаимодействующее оборудование через вход-выход БЦВС 12 по КИО 8. Другой вход-выход ВЛФМ ВВУИО 16 подключен к БМИО 13, осуществляющей информационный обмен между всеми ВЛФМ БЦВС 12.
ВЛФМ ОБД 14 выполнен на стандартном долговременном запоминающем устройстве, хранящем данные, поступившие с НПЗ 22.
В ВЛФМ ФУС 15 путем сопоставления заданных координат НТ из ВЛФМ ОБД 14 и текущих координат ЛА из НС 10 определяют заданный курс ЛА ψз, обеспечивающий полет ЛА по заданному маршруту.
Изобретение направлено на решение следующей технической проблемы: расширение функциональных возможностей системы путем повышения степени автоматизации процессов планирования применения и подготовки полетных заданий группе ЛА.
Техническую проблему в предлагаемом изобретении предлагается решить путем ввода в состав комплексной системы планирования применения и подготовки полетных заданий нескольких параллельных каналов с РМО ППЗ и НПЗ, обеспечивающих подготовку полетных заданий и запись их на носители ПЗ для ЛА (в том числе разнотипных) из состава группы, а также программно-аппаратного комплекса планирования применения группы ЛА, включающего универсальный видеомонитор, комплект универсальных устройств управления и электронный вычислительный блок, в состав которого входит универсальная магистраль информационного обмена с подключенными к ней ВЛФМ распределения задач между ЛА в группе, ВФЛМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы ЛА, ВЛФМ расчета показателя выживаемости группы ЛА в условиях противодействия и ВЛФМ формирования плановых таблиц полетов для групп ЛА.
Все ВЛФМ, входящие в состав ЭВБ, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
Сущность предлагаемого изобретения поясняется чертежом.
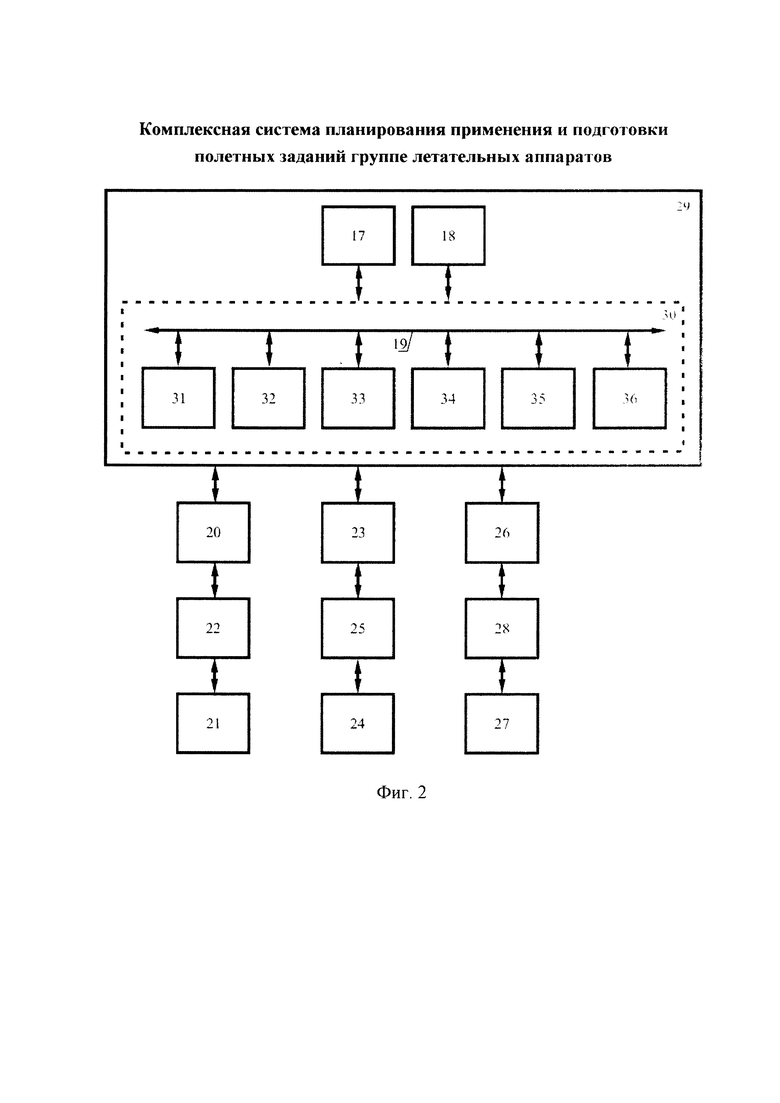
На фиг. 2 представлена блок-схема предлагаемого устройства, позициями обозначены:
17 - универсальный видеомонитор (ВМ);
18 - комплект универсальных устройств управления (УУ);
19 - универсальная магистраль информационного обмена (УМИО);
20 - РМО ППЗ для ЛА 1-го типа (РМО ППЗ 1);
21 - навигационный комплекс ЛА 1-го типа (НК 1);
22 - НПЗ для ЛА 1-го типа (НПЗ 1);
23 - РМО ППЗ для ЛА 2-го типа (РМО ППЗ 2);
24 - навигационный комплекс ЛА 2-го типа (НК 2);
25 - НПЗ для ЛА 2-го типа (НПЗ 2);
26 - РМО ППЗ для ЛА К-го типа (РМО ППЗ К);
27 - навигационный комплекс ЛА К-го типа (НК К);
28 - НПЗ для ЛА К-го типа (НПЗ К);
29 - программно-аппаратный комплекс планирования применения (ПАК ТТЛ) группы ЛА;
30 - электронный вычислительный блок (ЭВБ);
31 - ВЛФМ распределения задач между ЛА в группе (РЗ);
32 - ВФЛМ универсальной базы данных (УБД);
33 - ВЛФМ оценки досягаемости точки назначения (ОДТН);
34 - ВЛФМ расчета эффективности применения группы ЛА (РЭП);
35 - ВЛФМ расчета показателя выживаемости группы ЛА (РПВ);
36 - ВЛФМ формирования плановых таблиц полетов для групп ЛА
(ФПТ).
Рабочие места операторов ППЗ для ЛА 20, 23 и 26 построены аналогично РМО ППЗ устройства-прототипа, представленному на фиг. 1.
С учетом только значимых для изобретения признаков, техническая проблема решается благодаря тому, что комплексная система планирования применения и подготовки полетных заданий группе ЛА, состоящая из нескольких РМО ППЗ ЛА и нескольких сменных НПЗ, посредством которых ПЗ передается в бортовые навигационные комплексы ЛА, причем каждое РМО ППЗ состоит из универсального устройства записи информации на НПЗ, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком, включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена (УМИО) ВЛФМ базы данных картографической информации (БДКИ), ВЛФМ базы данных аэронавигационной информации (БДАНИ), ВЛФМ интерактивного формирования маршрута полета ЛА (ФМП), ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на НПЗ, дополнительно снабжена программно-аппаратным комплексом планирования применения (ПАК ПП) группы ЛА, включающим универсальный видеомонитор (ВМ), комплект универсальных устройств управления (УУ) и электронный вычислительный блок (ЭВБ), в состав которого входит УМИО с подключенными к ней ВЛФМ распределения задач (РЗ) между ЛА в группе, ВФЛМ универсальной базы данных (УБД), ВЛФМ оценки досягаемости точки назначения (ОДТН), ВЛФМ расчета эффективности применения (РЭП) группы ЛА, ВЛФМ расчета показателя выживаемости (РПВ) группы ЛА и ВЛФМ формирования плановых таблиц (ФПТ) полетов для групп ЛА.
Логика функционирования предлагаемого устройства в его ограничительной части соответствует вышеприведенному описанию системы-прототипа. Вновь введенные в состав системы блоки обеспечивают системе дополнительные свойства и функционируют следующим образом.
Оператор ПАК ПП 29, получив предварительное распоряжение о содержании задания группе ЛА, в процессе интерактивного взаимодействия посредством УУ 18 выводит на экран ВМ 17 перечень задач для отдельных ЛА из состава группы, а затем инициирует распределение этих задач с помощью ВЛФМ РЗ 31; при этом учитываются летно-технические данные ЛА различных типов, места их базирования (пуска), расположение объектов воздействия, предоставляемые ВЛФМ УБД 32, а также оперативно-тактическая и гидрометеорологическая информация.
Предварительный расчет маршрутов полета и пространственно-временных графиков полета ЛА осуществляется операторами соответствующих РМО ППЗ ЛА, получающими задания от ВЛФМ РЗ 31.
Досягаемость точки назначения для каждого ЛА из состава группы проверяется путем сравнения в ВФЛМ ОТДН 33 потребного запаса топлива, необходимого для полета по маршрутам полета, с запасом топлива в момент взлета ЛА с учетом навигационного остатка.
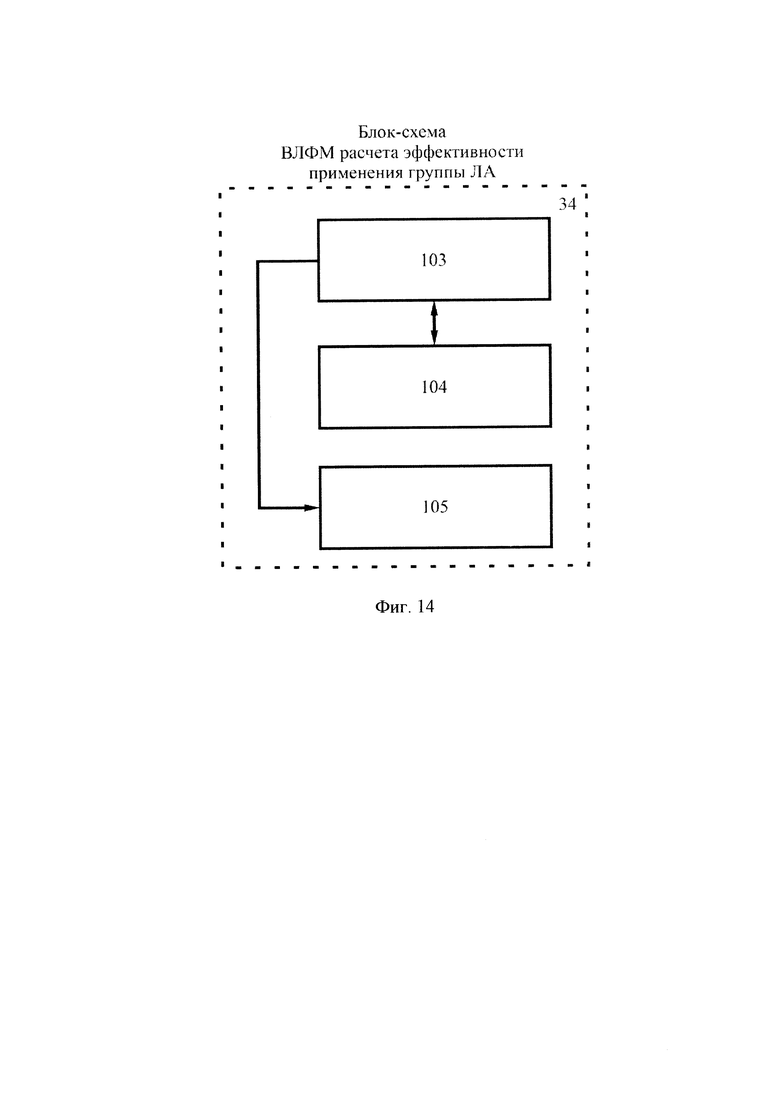
В ВЛФМ РЭП 34 выполняется расчет показателей эффективности решения поставленных задач каждым из ЛА группы и группы ЛА в целом при выбранном варианте их распределения по объектам воздействия с учетом летно-технических данных ЛА, маршрутов полета и пространственно-временных графиков полета, а также характеристик объектов воздействия.
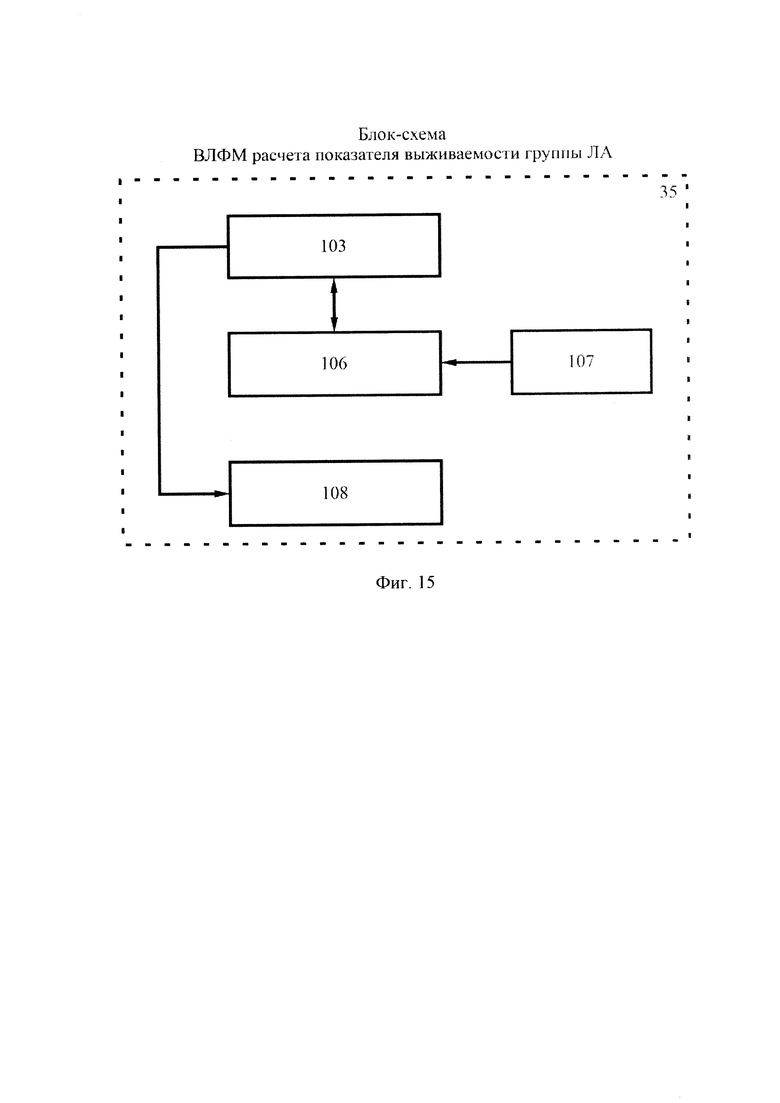
В ВЛФМ РПВ 35 рассчитываются показатели выживаемости ЛА на маршрутах полета к объектам воздействия и суммарные потери группы при выполнении задания.
По результатам выполненных расчетов в ВЛФМ ФПТ 36 формируется плановая таблица полетов, представляющая собой совокупность данных о решаемой каждым ЛА задаче, объекте воздействия и показателях эффективности и выживаемости ЛА.
При необходимости оператор ПАК ПП 29 с помощью УУ 18 и ВФЛМ УБД 32, используя информацию от ВЛФМ ОДТН 33, ВЛФМ РЭП 34 и ВЛФМ РПВ 35, может изменить задачи некоторым или всем ЛА из состава группы, назначив им объекты воздействий по своему усмотрению. После этого вновь производится расчет показателей эффективности и выживаемости для группы и формирование откорректированных плановых таблиц в ВЛФМ ФПТ 36.
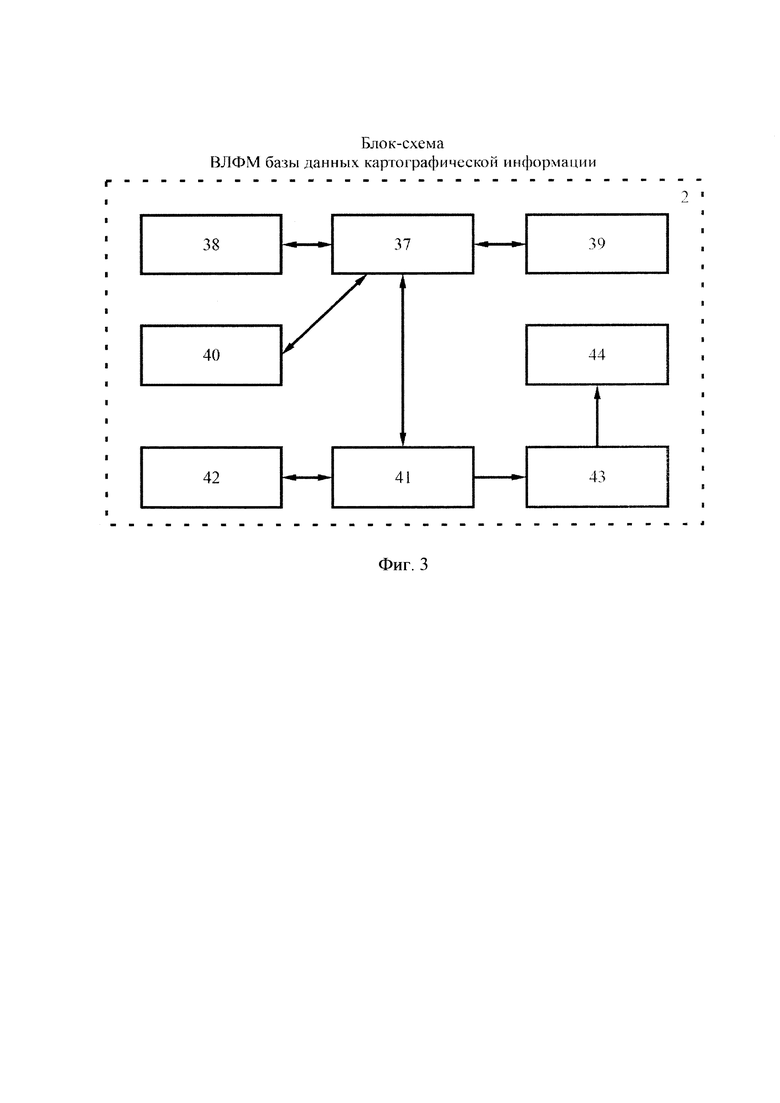
На фиг. 3 представлена блок-схема ВЛФМ БДКИ 2, на которой обозначены:
2 - ВЛФМ базы данных картографической информации (БДКИ);
37 - СУБД;
38 - картографическая информация;
39 - семантическая информация;
40 - библиотека стандартных функций;
41 - пользовательский интерфейс;
42 - канал передачи данных из хранилища;
43 - фильтрация;
44 - визуализация карт.
На фиг. 4 представлена блок-схема ВЛФМ БДАНИ 3, на которой обозначены:
3 - ВЛФМ базы данных аэронавигационной информации (БДАНИ);
37 - СУБД;
39 - семантическая информация;
41 - пользовательский интерфейс;
42 - канал передачи данных из хранилища;
43 - фильтрация;
45 - аэронавигационная информация;
46 - данные об аэродромах;
47 - данные об элементах воздушного пространства;
48 - данные о средствах радиотехнического обеспечения;
49 - данные о зонах запрета полетов;
50 - визуализация АНИ.
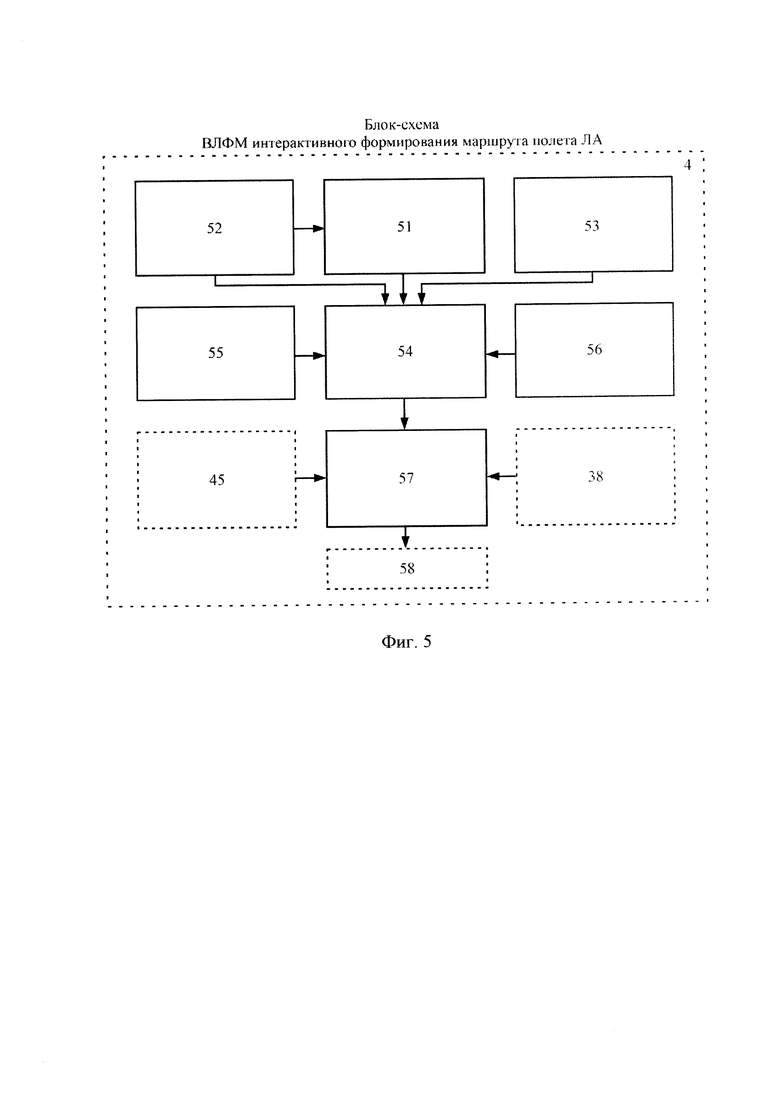
На фиг. 5 представлена блок-схема ВЛФМ ИФМП 4, на которой обозначены:
4 - ВЛФМ интерактивного формирования маршрута полета ЛА (ИФМП);
38 - картографическая информация; 45 - аэронавигационная информация;
51 - расчет и корректировка положения промежуточных пунктов маршрута;
52 - ввод положения аэродромов вылета и посадки;
53 - ввод положения районов боевого дежурства;
54 - интерфейс интерактивного формирования маршрута полета ЛА;
55 - ввод положения зон запрета пролета;
56 - ввод положения зон обязательного прохождения;
57 - отображение района полетов на электронной карте;
58 - координаты поворотных пунктов маршрута полета.
На фиг. 6 представлена блок-схема ВЛФМ ФПЗ 5, на которой обозначены:
5 - ВЛФМ формирования полетного задания (ФПЗ);
38 - картографическая информация;
45 - аэронавигационная информация;
57 - отображение района полетов на электронной карте;
59 - ввод служебной информации о номере полетного задания, дате и времени полета;
60 - ввод координат поворотных пунктов маршрута полета;
61 - эталонная информация для бортовых систем маршрутной навигации;
62 - интерфейс интерактивного формирования полетного задания;
63 - согласование и утверждение полетного задания должностными лицами;
64 - расчет пространственно-временного графика полета;
65 - полетное задание.
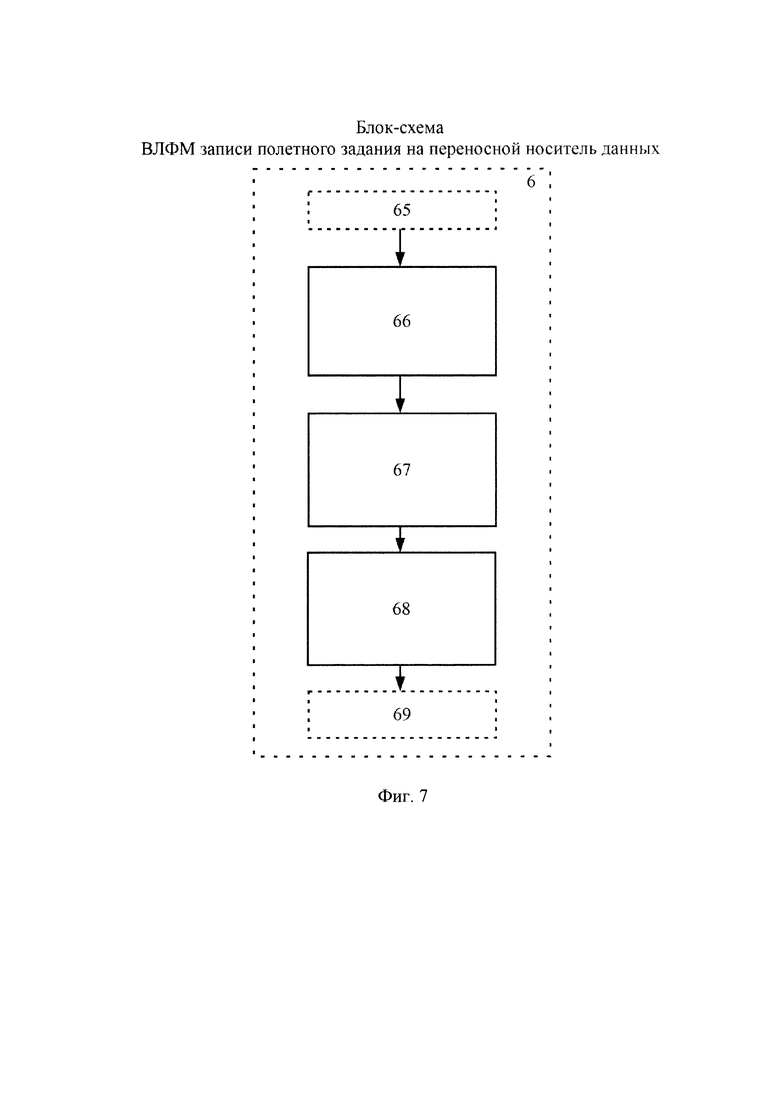
На фиг. 7 представлена блок-схема ВЛФМ ЗПЗ 6, на которой обозначены:
6 - ВЛФМ записи полетного задания на НПЗ (ЗПЗ);
65 - полетное задание;
66 - диспетчер записи полетного задания на переносной носитель данных;
67 - блок расчета и управления памятью переносного носителя данных;
68 - блок контроля правильности записи полетных заданий;
69 - переносной носитель данных.
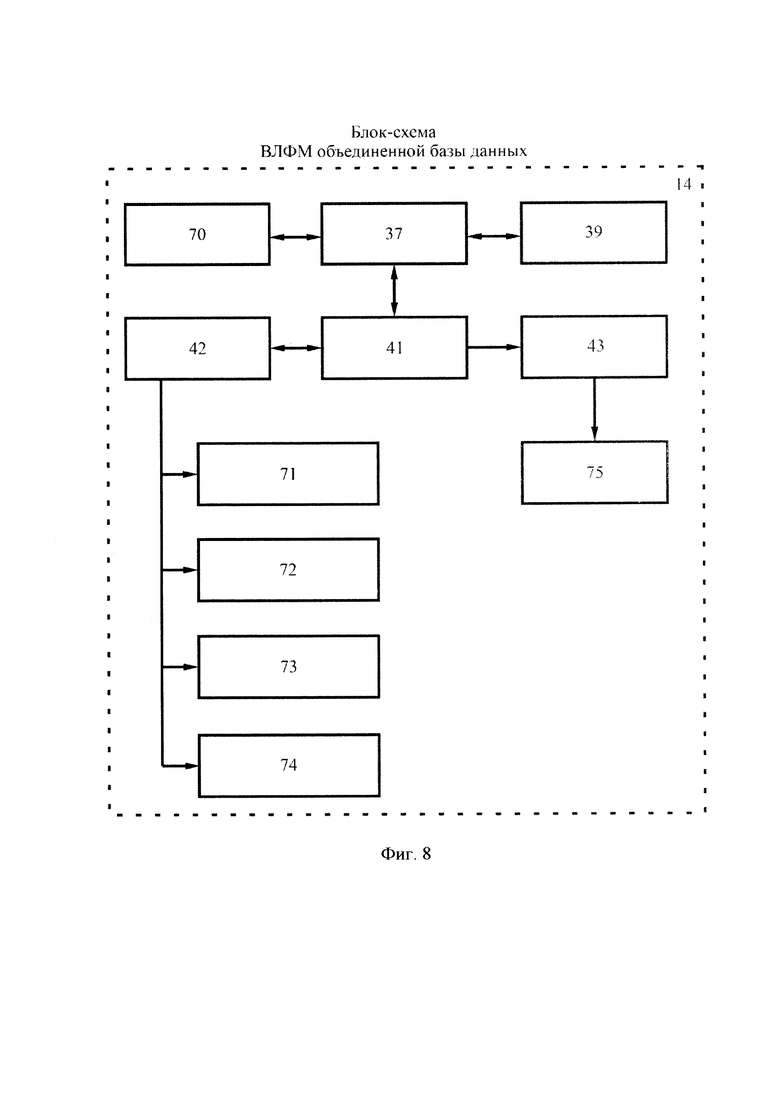
На фиг. 8 представлена блок-схема ВЛФМ ОБД 14, на которой обозначены:
14 - ВЛФМ объединенной базы данных (ОБД);
37 - СУБД;
39 - семантическая информация;
41 - пользовательский интерфейс;
42 - канал передачи данных из хранилища;
43 - фильтрация;
70 - объединенная база данных;
71 - данные о маршрутах;
72 - данные аэронавигационных карт района действий;
73 - данные о рельефе местности;
74 - данные о характеристиках бортового оборудования;
75 - исходная информация.
На фиг. 9 представлена блок-схема ВЛФМ ФУС 15, на которой обозначены:
15 - ВЛФМ формирования управляющих сигналов (ФУС);
76 - инерциальная система;
77 - система воздушных сигналов;
78 - бортовой радиолокатор;
79 - бортовой радиовысотомер;
80 - спутниковая навигационная система;
81 - блок стабилизации пространственного положения ЛА;
82 - блок стабилизации высоты;
83 - блок формирования управляющих сигналов для полета по маршруту;
84 - управляющий сигнал на руль высоты;
85 - управляющий сигнал на элероны;
86 - управляющий сигнал на руль направления;
87 - управляющий сигнал на автомат тяги двигателя.
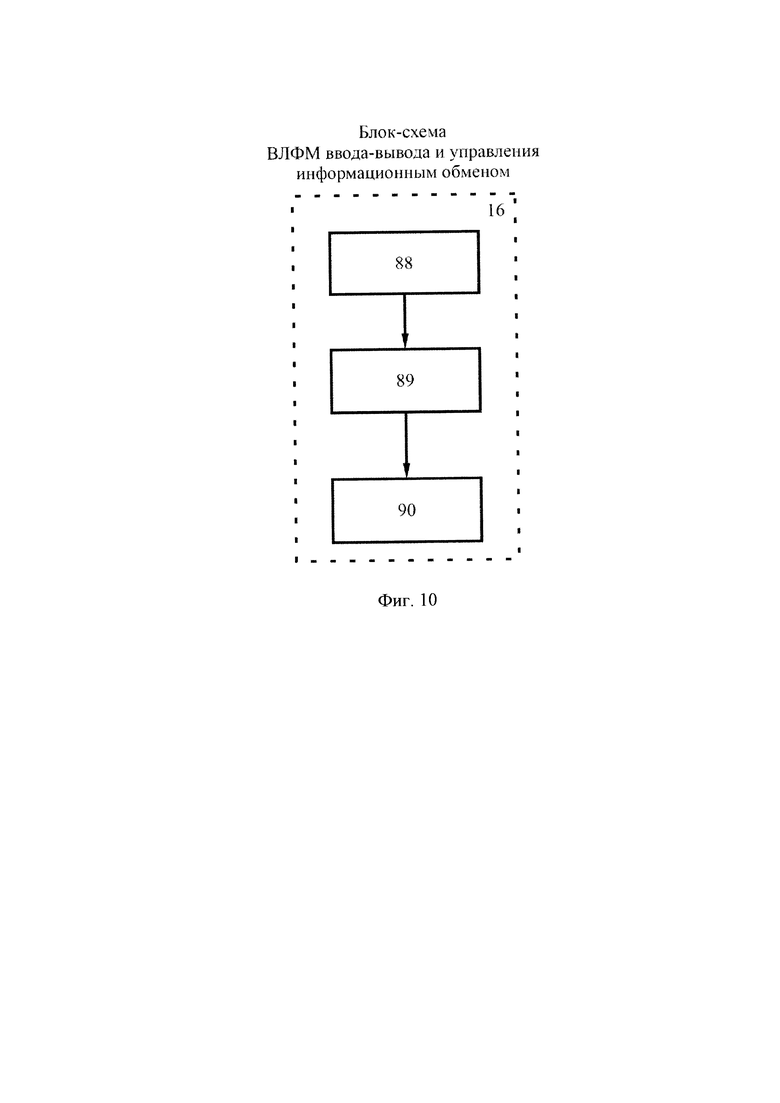
На фиг. 10 представлена блок-схема ВЛФМ ВВУИО 16, на которой обозначены:
16 - ВЛФМ ввода-вывода и управления информационным обменом (ВВУИО);
88 - прием данных;
89 - преобразование данных;
90 - передача данных.
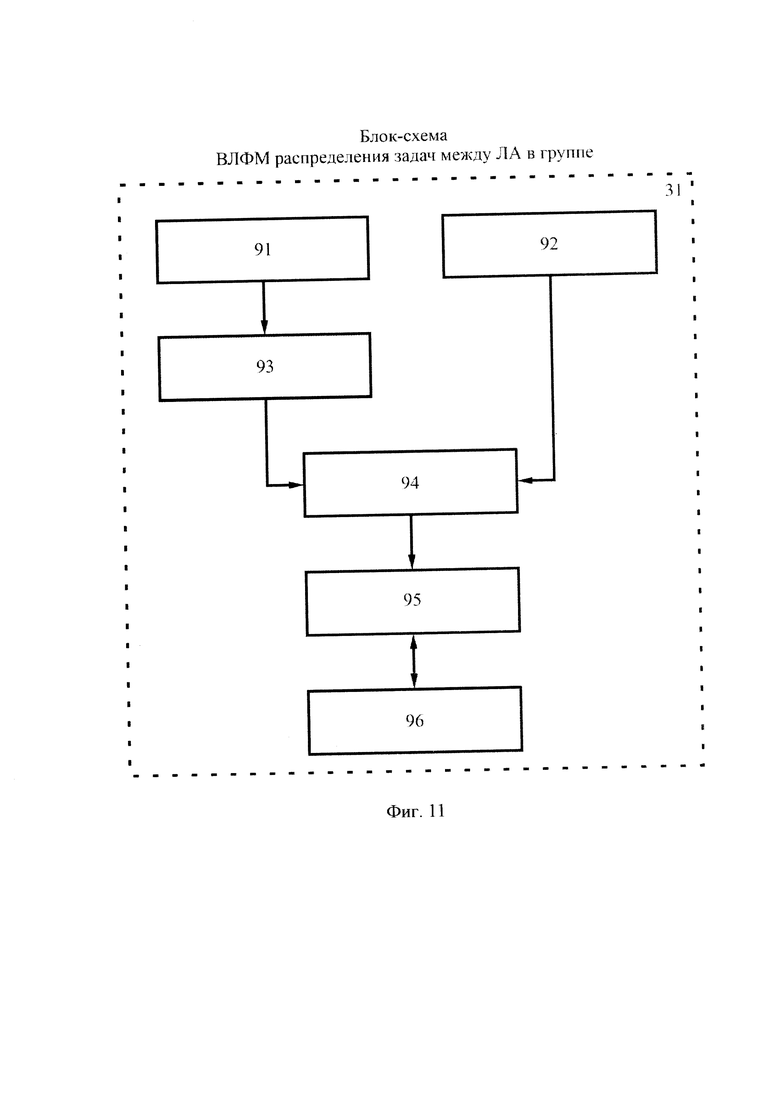
На фиг. 11 представлена блок-схема ВЛФМ РЗ 31, на которой обозначены:
31 - ВЛФМ распределения задач между ЛА в группе (РЗ);
91 - перечень задач для группы ЛА;
92 - наряд ЛА;
93 - установление важности задачи;
94 - назначение числа ЛА для решения i-той задачи;
95 - цикл по числу задач;
96 - назначение задачи i-му ЛА.
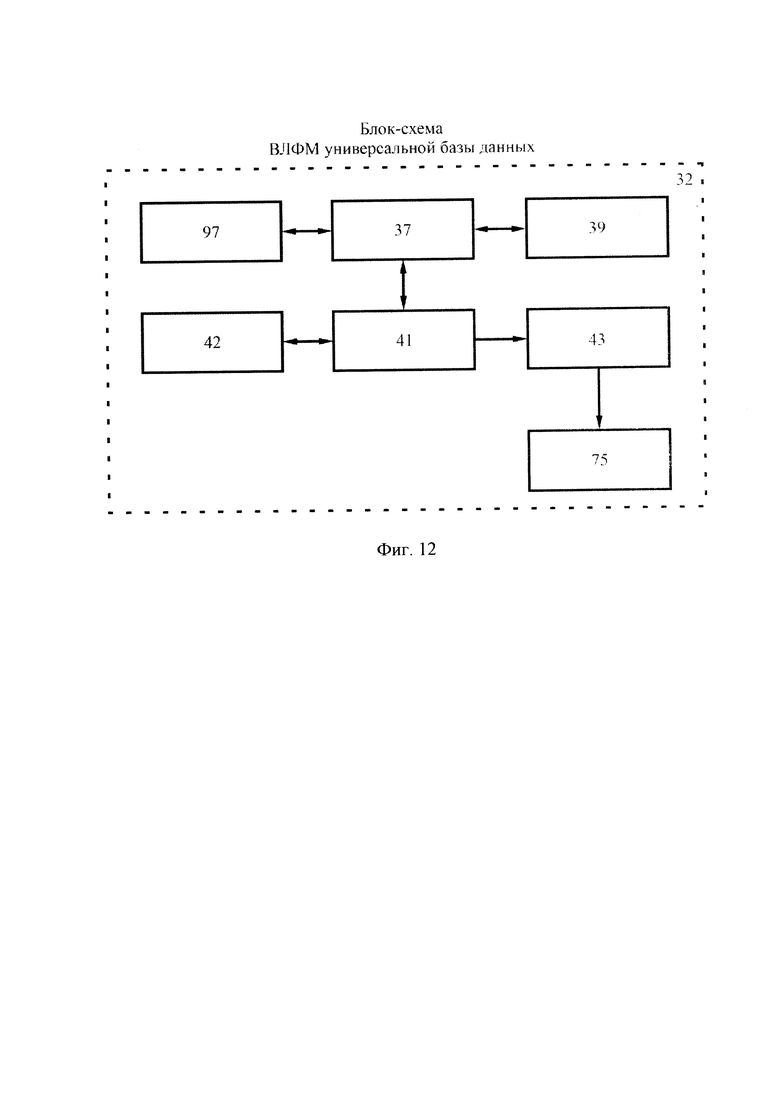
На фиг.12 представлена блок-схема ВЛФМ УБД 32, на которой обозначены:
32 - ВФЛМ универсальной базы данных (УБД);
37 - СУБД;
39 - семантическая информация;
41 - пользовательский интерфейс;
42 - канал передачи данных из хранилища;
43 - фильтрация;
75 - исходная информация;
97 - универсальная база данных.
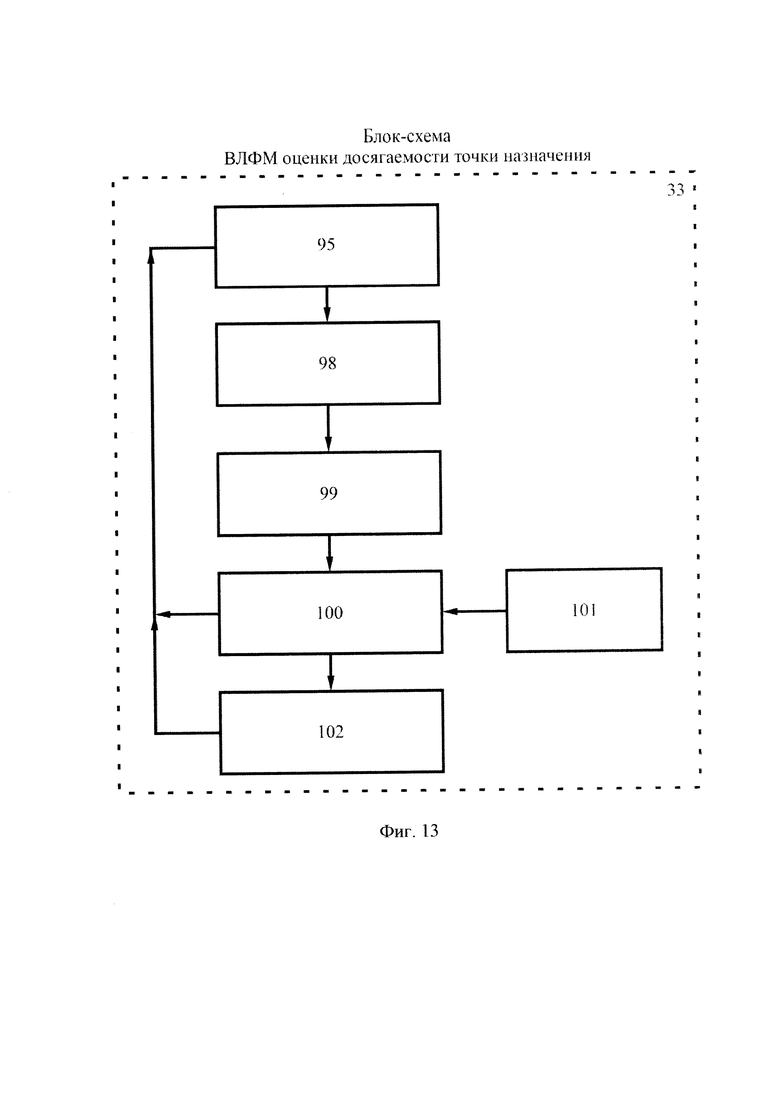
На фиг. 13 представлена блок-схема ВЛФМ ОДТН 33, на которой обозначены:
33 - ВЛФМ оценки досягаемости точки назначения (ОДТН);
95 - цикл по числу задач;
98 - определение точки назначения в соответствии с задачей;
99 - расчет протяженности полета по маршруту;
100 - сравнение протяженности полета с допустимой максимальной дальностью полета ЛА;
101 - база данных летно-технических характеристик ЛА;
102 - сообщение о нереализуемости задачи.
На фиг. 14 представлена блок-схема ВЛФМ РЭП 34, на которой обозначены:
34 - ВЛФМ расчета эффективности применения группы ЛА (РЭП);
103 - цикл по числу групп ЛА;
104 - расчет показателя эффективности применения i-го ЛА при решении поставленной задачи;
105 - расчет суммарного показателя эффективности группы ЛА.
На фиг. 15 представлена блок-схема ВЛФМ РПВ 35, на которой обозначены:
35 - ВЛФМ расчета показателя выживаемости группы ЛА (РПВ);
103 - цикл по числу групп ЛА;
106 - расчет вероятности поражения i-ro ЛА на маршруте;
107 - маршрут i-го ЛА;
108 - расчет суммарного показателя выживаемости группы ЛА.
На фиг. 16 представлена блок-схема ВЛФМ ФПТ 36, на которой обозначены:
36 - ВЛФМ формирования плановых таблиц полетов для групп ЛА (ФПТ);
103 - цикл по числу групп ЛА;
109 - план применения групп ЛА;
110 - формирование выборки (плановой таблицы) для i-той группы. Таким образом, на примере реализации показано достижение технического результата.
Источники информации
1. Батенко А.П. Управление конечным состоянием движущихся объектов. М.: Советское радио, 1977.
2. Воробьев Л.М. Воздушная навигация. М.: Машиностроение, 1984.
3. Система планирования и подготовки полетных заданий тактической группы самолетов. Патент РФ на изобретение №2147141. ОАО «РПКБ», 1999.
4. Комплексная система подготовки и навигации ЛА. Патент РФ на изобретение №2434202. ОАО «РПКБ», 2010.
5. Устройство управления траекторией ЛА при полете по маршруту. Патент РФ на изобретение №2444044. ОАО «РПКБ», 2010.
6. Комплексная система навигации и управления ЛА. Патент РФ на изобретение №2481558. ОАО «РПКБ», 2011.
7. Усовершенствованная система планирования полетного задания. Сб. «Новости зарубежной науки и техники», ГосНИИАС, №11, 1992, с. 11-15.
8. Комплексная система подготовки, навигации и управления ЛА. Патент РФ на изобретение №2614194. АО «РПКБ», 2015.
9. Будаев Д.С, Вощук Г.Ю., Гусев Н.А., Мочалкин А.Н. Мультиагентная система согласованного управления группой беспилотных летательных аппаратов. Труды XVIII Международной конференции «Проблемы управления и моделирования в сложных системах» - Самара: ОФОРТ, 2016. С. 180-190.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2820582C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И КОРРЕКТИРОВКИ ПОЛЕТНЫХ ЗАДАНИЙ, НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2747760C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| ИНФОРМАЦИОННО-ТЕХНИЧЕСКАЯ СИСТЕМА ПОДГОТОВКИ ПОЛЁТНЫХ ЗАДАНИЙ НА ИСПЫТАТЕЛЬНЫЕ ПОЛЁТЫ | 2024 |
|
RU2835753C1 |
| Способ формирования полетной траектории летательного аппарата | 2015 |
|
RU2611453C1 |
| ИНТЕРФЕЙС ИНФОРМАЦИОННО-ТЕХНИЧЕСКОГО СОПРЯЖЕНИЯ СОСТАВНЫХ ЧАСТЕЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ ПОДГОТОВКИ ПОЛЁТНЫХ ЗАДАНИЙ НА ИСПЫТАТЕЛЬНЫЕ ПОЛЁТЫ | 2024 |
|
RU2839814C1 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |




Изобретение относится к области авиационного приборостроения и может быть использовано в составе автоматизированных систем планирования применения летательных аппаратов (ЛА) и подготовки полетных заданий (ППЗ) ЛА. Комплексная система планирования применения и подготовки полетных заданий группе ЛА состоит из нескольких рабочих мест оператора ППЗ и нескольких сменных носителей полетных заданий, посредством которых полетное задание передается в бортовые навигационные комплексы летательных аппаратов, причем каждое рабочее место оператора подготовки полетных заданий состоит из универсального устройства записи информации на носитель полетного задания, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком, включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена вычислительно-логические функциональные модули (ВЛФМ) базы данных картографической информации, ВЛФМ базы данных аэронавигационной информации, ВЛФМ интерактивного формирования маршрута полета ЛА, ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на носитель полетного задания. Система дополнительно снабжена программно-аппаратным комплексом планирования применения группы ЛА, включающим универсальный видеомонитор, комплект универсальных устройств управления, соединенных входами-выходами с электронным вычислительным блоком, в состав которого входит универсальная магистраль информационного обмена с взаимосоединенными входами-выходами к ней ВЛФМ распределения задач между ЛА в группе, ВФЛМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы ЛА, ВЛФМ расчета показателя выживаемости группы ЛА и ВЛФМ формирования плановых таблиц полетов для групп ЛА. Технический результат - расширение функциональных возможностей. 16 ил.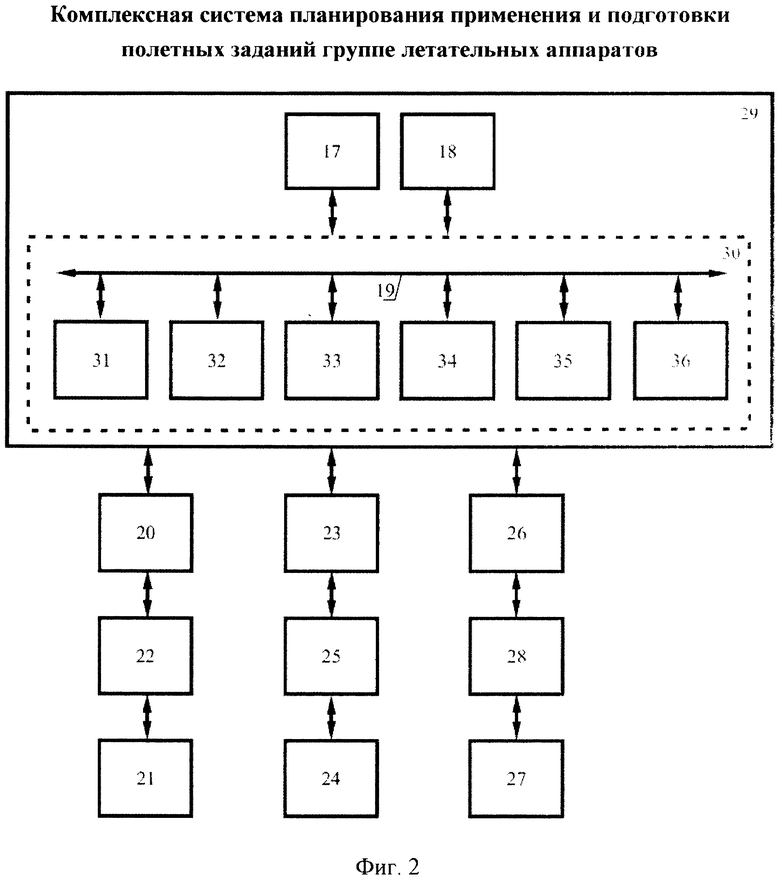
Комплексная система планирования применения и подготовки полетных заданий группе летательных аппаратов, состоящая из нескольких рабочих мест оператора подготовки полетных заданий и нескольких сменных носителей полетных заданий, посредством которых полетное задание передается в бортовые навигационные комплексы летательных аппаратов, причем каждое рабочее место оператора подготовки полетных заданий состоит из универсального устройства записи информации на носитель полетного задания, универсального видеомонитора и комплекта универсальных устройств управления, соединенных входами-выходами с электронным блоком, включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена вычислительно-логические функциональные модули (ВЛФМ) базы данных картографической информации, ВЛФМ базы данных аэронавигационной информации, ВЛФМ интерактивного формирования маршрута полета ЛА, ВЛФМ формирования полетного задания и ВЛФМ записи полетного задания на носитель полетного задания, отличающаяся тем, что она дополнительно снабжена программно-аппаратным комплексом планирования применения группы летательных аппаратов, включающим универсальный видеомонитор, комплект универсальных устройств управления, соединенных входами-выходами с электронным вычислительным блоком, в состав которого входит универсальная магистраль информационного обмена с взаимосоединенными входами-выходами к ней ВЛФМ распределения задач между летательными аппаратами в группе, ВФЛМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы летательных аппаратов, ВЛФМ расчета показателя выживаемости группы летательных аппаратов и ВЛФМ формирования плановых таблиц полетов для групп летательных аппаратов.
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| Приспособление для подвода сточных вод в отстойник | 1926 |
|
SU10899A1 |
| US 7970532 B2, 28.06.2011. | |||

