Изобретение относится к области авиационного приборостроения.
На борту современных летательных аппаратов (ЛА) решение большинства навигационных задач осуществляется в составе навигационных комплексов (НК).
НК современного ЛА представляет собой совокупность бортовых навигационно-пилотажных систем (НПС), работа которых основана на различных физических принципах действия.
Цель объединения этих систем в составе НК - решение задач навигации и самолетовождения ЛА с максимально возможной точностью и с максимально возможной надежностью. Достигается эта цель путем информационного и функционального объединения НПС вокруг бортовой цифровой вычислительной системы (БЦВС) с помощью цифровых каналов информационного обмена (КИО).
Теоретические основы функционирования НК и описание некоторых из них приведены в работах отечественных и зарубежных авторов. В частности, в работах, которые приведены ниже:
1. Августов Л.И. и др. Навигация летательных аппаратов в околоземном пространстве. - М.: ООО Научтехлитиздат, 2015;
2. Бабич О.А. "Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991;
3. Белгородский СЛ. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972;
4. Воробьев Л.М. Воздушная навигация. - М.: Машиностроение, 1984;
5. Помыкаев И.И. и др. Навигационные приборы и системы. - М.: Машиностроение, 1983;
6. OCT В1 00391-90. КОМПЛЕКСЫ БОРТОВЫЕ ЦИФРОВЫЕ МАНЕВРЕННЫХ САМОЛЕТОВ И ВЕРТОЛЕТОВ. Построение системы унифицированных навигационных алгоритмов бортовых цифровых вычислительных систем;
7. Рогожин В.О. и др. "Пiлотажно-навiгацiйнi комплекси повiтряних суден", К.: НАУ, 2005 (на украинском языке).
Информационной основой НК современных ЛА являются автономные датчики навигационно-пилотажной информации инерциального характера, такие как инерциальные навигационные системы (ИНС).
ИНС обладают такими достоинствами, как автономность, помехозащищенность, скрытность и непрерывность работы, что обеспечивает их практически повсеместное применение в качестве основных навигационных систем на борту современных ЛА. Современные авиационные ИНС достаточно надежны и точны, однако достигнутые в настоящее время уровни этих характеристик ИНС не в полной мере соответствуют современным требованиям, предъявляемым к навигации современных ЛА.
Для обеспечения соответствующего уровня надежности ИНС на борту ЛА, как правило, дублируется. При этом зачастую из экономических соображений для этих целей в НК используются более простые системы инерциального характера - инерциальные курсовертикали (ИКВ).
Важным источником навигационно-пилотажной информации в составе НК являются датчики аэрометрического характера, такие как системы воздушных сигналов (СВС). Они измеряют скоростные параметры движения ЛА относительно воздуха и высоту ЛА относительно заданных уровней атмосферного давления у поверхности Земли. СВС, как и ИНС, также обладают такими достоинствами, как автономность, помехозащищенность, скрытность и непрерывность работы, но т.к. они измеряют параметры движения ЛА относительно воздуха, их информация используется, прежде всего, при пилотировании ЛА и только во вторую очередь при решении навигационных задач, в основном при отказе ИНС.
Для достижения необходимого уровня точности навигационно-пилотажные параметры, измеряемые ИНС, СВС и ИКВ, корректируют по данным от других, более точных систем измерения координат и/или скорости, но которые не обладают их вышеупомянутыми достоинствами.
В вышеупомянутой технической литературе приведены примеры использования для коррекции автономных навигационных систем спутниковых радионавигационных систем (СНС), доплеровских измерителей путевой скорости и сноса (ДИСС), радиотехнических систем дальней (РСДН) и ближней (РСБН) навигации, радиотехнических радиовысотомеров (РВ), корреляционно-экстремальных навигационных систем (КЭНС) и систем визуальной коррекции (СВК) [1, 2, 4, 5, 6, 7].
Важной частью НК также являются радиотехнические системы посадки (РСП), которые, взаимодействуя с наземным радиотехническим оборудованием аэродрома, обеспечивают определение положения ЛА относительно "заданной" траектории захода на посадку (глиссады), в том числе при плохой видимости и в сложных метеорологических условиях [3, 7].
В настоящее время на борту современных ЛА устанавливаются РСП, которые взаимодействуют с наземным радиомаячным оборудованием международной системы ILS (Instrument Landing System) и/или отечественной системы посадки (СП).
СНС, РСДН, РСБН и РСП неавтономны, подвержены помехам естественного и искусственного характера и могут иметь перерывы в работе.
ДИСС и РВ автономны, но также имеют перерывы в работе и подвержены помехам.
Кроме этого, работа РСБН, ДИСС, РВ и РСП связана с излучением электромагнитной энергии с борта ЛА, что в некоторых ситуациях неприемлемо.
Работа СВК зависит от метеорологических условий, времени суток и требует существенной дополнительной загрузки экипажа.
Эффективность работы КЭНС зависит от информативности используемого геофизического поля в точке текущего местоположения ЛА.
Информация от всех измерительных систем из состава НК вводится для обработки в БЦВС.
Процессы обмена (ввода/вывода) информацией между бортовыми системами современных ЛА в преобладающем числе случаев обеспечиваются с помощью цифровых интерфейсов. На борту конкретного ЛА, в настоящее время, как правило, одновременно используется несколько интерфейсов различной архитектуры: параллельные цифровые каналы внутри систем, в том числе в составе БЦВС - цифровые магистрали информационного обмена (МИО), последовательные и мультиплексные цифровые каналы для взаимодействия бортовых систем между собой и с БЦВС - цифровые каналы информационного обмена (КИО).
В БЦВС при обработке входной информации, прежде всего, осуществляется определение исправности измерительных систем и достоверности поступивших от них параметров, затем при необходимости осуществляется синхронизация по времени информации от различных систем и преобразование их в необходимую систему координат, например, в географическую, ортодромическую, полярную, скоростную или связанную со строительными осями ЛА.
Затем осуществляется комплексная обработка информации (КОИ) от автономных и корректирующих систем, что позволяет сформировать в БЦВС откорректированный вектор состояния ЛА (координаты, высота, курс, крен, тангаж, составляющие векторов путевой скорости, угловой скорости, ускорения и т.п.), компоненты которого обладают одновременно достоинствами как автономных, так и неавтономных систем.
С учетом свойств автономных систем и недостатков корректирующих систем в БЦВС НК современных ЛА для комплексирования информации от автономных и корректирующих систем наиболее часто применяется такой метод КОИ, как оптимальный фильтр Калмана (ОФК), описанный в вышеупомянутых книгах [1, 2, 4, 6, 7].
Соответствующие компоненты откорректированного вектора состояния ЛА используются в БЦВМ при решении практически всех функциональных задач, возложенных на НК, в том числе при решении задач управления ЛА при взлете с аэродрома, полете по маршруту, возврате и посадке на аэродром. Кроме этого компоненты откорректированного вектора состояния ЛА используются также при формировании необходимых информационных и командных данных для индикации экипажу ЛА, а также для выдачи во внешние, по отношению к НК, системы ЛА.
Все задачи, решаемые в БЦВМ, реализуются в ней с помощью вычислительно-логических функциональных модулей (ФМ), которые выполняют соответствующие функции в интересах всего НК, например ФМ первичной обработки информации (ПОИ) для НК, включающего по максимуму все вышеперечисленные НПС, обеспечивает первичную обработку информации ИНС, ИКВ, СВС, СНС, РСБН, ДИСС, РВ, СВК, КЭНС, РСП.
С учетом цели изобретения полагаем, что описание наиболее близкого к предлагаемому изобретению устройства (прототип) приведено одновременно в [6] и [7].
Также, с учетом цели предлагаемого изобретения, изложенной ниже, делаем следующие, не противоречащие содержанию [6] и [7], и при этом полностью соответствующие реальной практике проектирования и эксплуатации НК допущения:
1) полагаем, что устройство-прототип имеет переменную структуру, а именно некоторые из НПС могут быть в отказавшем состоянии, не установлены на борт ЛА или выключены в конкретном полете или, в предельном случае, даже не введены в состав НК конкретного ЛА;
2) полагаем, что НК включает комплект ИНС, комплект ИКВ, комплект СНС, комплект СВС, комплект РСБН, комплект РВ и комплект РСП - необходимость резервирования критически важной навигационно-пилотажной информации от этих систем путем установки на борт ЛА нескольких однотипных датчиков актуальна для некоторых типов ЛА, например ЛА корабельного базирования;
3) полагаем, что КНПС также включает комплект СВК, в состав которого могут входить нескольких разнотипных датчиков, например, таких как оптико-локационная станция, лазерный дальномер, нашлемный визир, коллиматорный индикатор на лобовом стекле кабины ЛА и др.
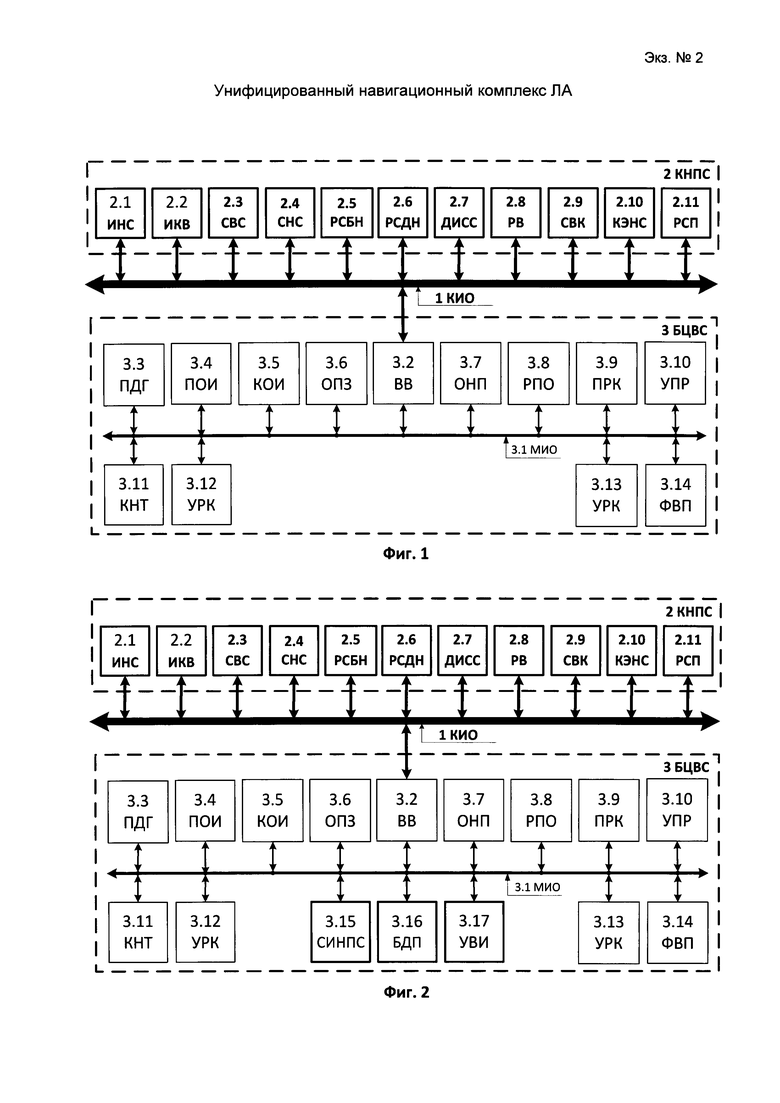
Таким образом, с учетом только существенных для предлагаемого изобретения признаков устройство-прототип содержит взаимосоединенные входами-выходами по КИО комплект НПС (КНПС) и БЦВС, причем комплектНПС состоит из комплекта ИНС, комплекта ИКВ, комплекта СВС, комплекта СНС, комплекта РСБН, РСДН, ДИСС, комплекта РВ, комплекта СВК, КЭНС и комплекта РСП, а БЦВС включает взаимосоединенные входами-выходами по МИО ФМ ввода-вывода информации по КИО (ВВ), подготовки (ПДГ), первичной обработки информации (ПОИ), комплексной обработки информации (КОИ), определения параметров Земли (ОПЗ), определения навигационных параметров (ОНП), расчета параметров ортодромии (РПО), преобразования координат (ПРК), определения управляющих параметров (УПР), контроля комплекса (КНТ), управления режимами комплекса (УРК), информационного обеспечения принятия решений (ИОПР) и формирования выходных параметров (ФВП).
Это устройство проиллюстрировано структурной схемой, приведенной на фиг. 1. На схеме обозначены:
1 - цифровые каналы информационного обмена (КИО);
2 - комплект навигационно-пилотажных систем (КНПС) в составе:
2.1 - комплект ИНС (ИНС),
2.2 - комплект ИКВ (ИКВ),
2.3 - комплект СВС (СВС),
2.4 - комплект СНС (СНС),
2.5 - комплект РСБН (РСБН),
2.6 - РСДН,
2.7 - ДИСС,
2.8 - комплект РВ (РВ),
2.9 - комплект СВК (СВК),
2.10 -КЭНС,
2.11 - комплект РСП (РСП);
3 - бортовая цифровая вычислительная система (БЦВС) в составе:
3.1 - цифровая магистраль информационного обмена (МИО),
3.2 - ФМ ВВ,
3.3 - ФМ ПДГ,
3.4 - ФМ ПОИ,
3.5 - ФМ КОИ,
3.6 - ФМ ОПЗ,
3.7 - ФМ ОНП,
3.8 - ФМ РПО,
3.9 - ФМ ПРК,
3.10 - ФМ УПР,
3.11 - ФМ КНТ,
3.12 - ФМ УРК,
3.13 - ФМ ИОПР,
3.14 - ФМ ФВП.
Такое устройство позиционируется в [6] как унифицированный НК (УНК), который может быть использован на любом типе ЛА или в полном объеме или адаптирован под требования конкретного типа ЛА. Однако в настоящее время стало очевидно, что степень его унификации не в полной мере соответствует современным требованиям. Как показала практика, при замене в составе комплекса одного типа НПС на другой, например при модернизации комплекса, зачастую требуется существенное перепроектирование ФМ ВВ, ПОИ, ФВП и частичное перепроектирование других ФМ из состава БЦВС.
Целью предлагаемого изобретения является повышение степени унификации НК и, как следствие, упрощение и снижение стоимости технологических процедур перепроектирования НК под потребности конкретного ЛА, а также расширение возможностей БЦВС по функциональной адаптации к текущей информационной структуре КНПС в конкретном полете.
Для достижения этой цели в предлагаемом устройстве используется концепция унифицированного функционального "ЯДРА" БЦВМ с унифицированным интерфейсом, окруженного двумя неунифицированными функциональными оболочками - "ВВОД-ВЫВОД" и "УНИФИКАЦИЯ".
Рисунок на фиг. 3 иллюстрирует используемую в предлагаемом устройстве концепцию функционирования БЦВМ в УНК.
В предлагаемом устройстве оболочка "ВВОД-ВЫВОД" состоит из ФМ ВВ и ФВП.
В состав унифицированного функционального "ЯДРА" БЦВМ в предлагаемом устройстве отнесены ФМ ПДГ, ПОИ, КОИ, ОПЗ, ОНП, ФМ РПО, ПРК, УПР, КНТ, УРК, ИОПР.
Роль функциональной оболочки "УНИФИКАЦИЯ" в предлагаемом устройстве предлагается полностью возложить на вновь вводимые в состав БЦВС ФМ сканирования и идентификации подключенных к КИО НПС (СИНПС), ФМ базы данных протоколов информационного взаимодействия НПС (БДП) и ФМ унификации входной информации от НПС (УВИ).
Таким образом, с учетом только существенных для предлагаемого изобретения признаков в УНК ЛА, содержащем взаимосоединенные входами-выходами по КИО КПНС и БЦВС, причем КПНС состоит из комплекта ИНС, комплекта ИКВ, комплекта СВС, комплекта СНС, комплекта РСБН, РСДН, ДИСС, комплекта РВ, комплекта СВК, КЭНС и комплекта РСП, а БЦВС включает взаимосоединенные входами-выходами по МИО ФМ ВВ, ПДГ, ПОИ, КОИ, ОПЗ, ОНП, РПО, ПРК, УПР, КНТ, УРК, ИОПР и ФВП, дополнительно введен в состав БЦВС ФМ СИНПС, который по входу-выходу соединен по МИО с ФМ ВВ и ФВП, а также с вновь введенными в состав БЦВС ФМ БДП и УВИ, который выходом соединен по МИО со всеми ФМ из состава БЦВС.
Структурная схема, иллюстрирующая предлагаемый УНК, приведена на фиг. 2. На схеме обозначены:
1 - цифровые каналы информационного обмена (КИО);
2 - комплект навигационно-пилотажных систем (КНПС) в составе:
2.1 - комплект ИНС,
2.2 - комплект ИКВ,
2.3 - комплект СВС,
2.4 - комплект СНС,
2.5 - комплект РСБН,
2.6 - РСДН,
2.7 - ДИСС,
2.8 - комплект РВ,
2.9 - комплект СВК,
2.10 - КЭНС,
2.11 - комплект РСП;
3 - бортовая цифровая вычислительная система (БЦВС) в составе:
3.1 - цифровая магистраль информационного обмена (МИО),
3.2 - ФМ ВВ,
3.3 - ФМ ПДГ,
3.4 - ФМ ПОИ,
3.5 - ФМ КОИ,
3.6 - ФМ ОПЗ,
3.7 - ФМ ОНП,
3.8 - ФМ РПО,
3.9 - ФМ ПРК,
3.10 - ФМ УПР,
3.11 - ФМ КНТ,
3.12 - ФМ УРК,
3.13 - ФМ ИОПР,
3.14 - ФМ ФВП,
3.15 - ФМ СИНПС,
3.16 - ФМ БДП,
3.17 - ФМ УВИ.
УНК обеспечивает решение навигационно-пилотажных задач ЛА при использовании данных от следующих, взаимодействующих с БЦВС по цифровым каналам информационного обмена, НПС:
1) инерциальных навигационных систем,
2) инерциальных курсовертикалей,
3) систем воздушных сигналов,
4) спутниковых радионавигационных систем,
5) доплеровского измерителя путевой скорости и угла сноса,
6) радиосистем ближней навигации,
7) радиосистемы дальней навигации,
8) радиовысотомеров,
9) средств визуальной коррекции,
10) корреляционно-экстремальной навигационной системы,
11) радиотехнических систем посадки.
ИНС в составе УНК измеряет составляющие векторов ускорения и угловой скорости ЛА и, интегрируя их, определяют параметры углового положения ЛА - курс, крен, тангаж, а также составляющие вектора линейной скорости и координаты местоположения ЛА - географические широту, долготу и высоту.
ИКВ в составе УНК, как и ИНС, измеряет составляющие векторов ускорения и угловой скорости ЛА и, интегрируя их, определяют параметры углового положения ЛА - курс, крен, тангаж.
СВС в составе УНК, измеряя статическое и динамическое давления воздуха, а также температуру заторможенного воздуха, определяет скоростные параметры движения ЛА относительно воздуха и высоту ЛА относительно заданных уровней атмосферного давления у поверхности Земли.
СНС в составе УНК, используя данные, поступающие по эфиру от нескольких искусственных спутников Земли с известными координатами местоположения,определяет составляющие вектора линейной скорости и координаты местоположения ЛА в географической системе координат.
РСБН в составе УНК, взаимодействуя по эфиру с наземным радиомаяком (РМ), определяет полярные координаты местоположения ЛА - дальность и азимут ЛА относительно РМ, которые с учетом известных географических координат РМ позволяют определять в БЦВС координаты местоположения ЛА в географической и других системах координат.
РСДН в составе УНК, используя данные о разности времен прихода сигналов от ведущей и как минимум двух ведомых наземных радиостанций с известными географическими координатами, определяет координаты местоположения ЛА в географической системе координат.
ДИСС в составе УНК, измеряя доплеровские сдвиги частот в отраженных от земной поверхности радиотехнических сигналах, излученных с ЛА как минимум в трех направлениях определяет составляющие вектора путевой скорости ЛА в связанной системе координат.
РВ в составе УНК, измеряя время прохождения радиотехнических сигналов от ЛА до земли и обратно, определяет высоту ЛА относительно подстилающей земной поверхности.
С помощью СВК в составе УНК измеряют параметры положения ЛА относительно визуально контрастных ориентиров на земной поверхности - дальность до ориентира, углы направления линии визирования ориентира и затем, используя известные географические координаты этих ориентиров, определяют географические координаты текущего местоположения ЛА.
КЭНС в составе УНК измеряет параметры соответствующих геофизических полей, например поля рельефа земной поверхности или магнитного поля, и, сопоставляя их с хранящимися в памяти КЭНС картами соответствующих полей, определяет координаты текущего местоположения ЛА.
РСП в составе УНК, взаимодействуя с наземным радиотехническим оборудованием аэродрома, обеспечивают определение положение ЛА относительно "заданной" траектории захода на посадку (глиссады).
Входящая в состав УНК БЦВС обеспечивает решение следующих навигационно-пилотажных задач:
1) ввод информации по КИО от НПС;
2) вывод информации по КИО в смежные системы и в НПС;
3) идентификацию подключенных к КИО НПС;
4) унификацию информации от НПС;
5) первичную обработку информации от НПС;
2) управление решением задач во всех режимах работы комплекса;
3) определение углового положения ЛА, углов крена, тангажа и курса;
4) определение путевой скорости, истинной воздушной скорости, угла сноса, направления и значения скорости ветра;
5) определение координат местоположения ЛА в географической и ортодромической системах координат;
6) комплексную обработку информации, оценку ошибок систем и коррекцию выходных навигационных параметров;
7) построение линии заданного пути и формирование управляющих параметров для САУ, обеспечивающих автоматическое, полуавтоматическое и ручное пилотирование ЛА на маршруте;
8) построение траектории возврата и предпосадочного маневра в горизонтальной и вертикальной плоскостях и определение управляющих параметров для САУ, обеспечивающих вывод ЛА в зону действия радиотехнических посадочных средств аэродрома при автоматическом, полуавтоматическом и ручном пилотировании ЛА;
9) построение траектории посадки в горизонтальной и вертикальной плоскостях и определение управляющих параметров для САУ при автоматическом, полуавтоматическом и ручном пилотировании ЛА;
10) предполетный и полетный контроль комплекса;
11) начальную подготовку комплекса к полету;
12) формирование для выдачи управляющих и информационных сигналов на индикацию, в НПС и в другие бортовые системы ЛА.
Решение указанных задач в составе БЦВС обеспечивается следующими, взаимодействующими по МИО ФМ:
1) ФМ ввода-вывода информации (ВВ);
2) ФМ подготовки комплекса (ПДГ);
3) ФМ первичной обработки информации от НПС (ПОИ);
4) ФМ комплексной обработки информации от НПС (КОИ);
5) ФМ определения параметров Земли (ОПЗ);
6) ФМ определения навигационных параметров (ОНП);
7) ФМ расчета параметров ортодромии (РПО);
8) ФМ преобразования координат (ПРК);
9) ФМ определения управляющих параметров (УПР);
10) ФМ контроля комплекса (КНТ);
11) ФМ управления режимами работы комплекса (УРК);
12) ФМ информационного обеспечения принятия решений (ИОПР);
13) ФМ формирования выходных параметров для выдачи (ФВП);
14) ФМ сканирования и идентификации НПС (ИНПС), подключенных к КИО;
15) ФМ базы данных протоколов (БДП) информационного взаимодействия НПС;
16) ФМ унификации входной информации от НПС (УВИ).
ФМ ВВ обеспечивает организацию приема и выдачи входной и выходной информации от ПНС по КИО.
ФМ ПДГ обеспечивает:
- определение стояночного курса ЛА различными методами - методом гирокомпасирования, методом заданного курса, методом запомненного курса, по аэродромному наземному ориентиру или осевой линии взлетно-посадочной полосы при использовании СВК;
- расчет начальных значений навигационно-пилотажных параметров.
ФМ РПО обеспечивает:
- расчет параметров ортодромической системы координат;
- расчет координат текущей навигационной точки (НТ) в ортодромической системе координат;
- расчет угла направления следующей ортодромической системы координат.
ФМ ПРК обеспечивает:
- расчет текущих координат местоположения ЛА в ортодромической системе координат;
- определение дальности и угла направления на текущую НТ;
- определение азимута и дальности ЛА относительно радиомаяка РСБН, относительно аэродрома возврата и других геодезических точек;
- расчет разности дальностей радиотехнических станций РСДН относительно текущего местоположения ЛА;
- определение угла пересечения географического и ортодромического меридианов.
ФМ ОПЗ обеспечивает:
- определение радиусов кривизны земного эллипсоида и коэффициентов его кривизны по направлениям осей географической системы координат;
- расчет составляющих угловой скорости вращения и линейной переносной скорости Земли по направлениям осей географической системы координат;
- определение составляющих гравитационного ускорения по направлениям осей географической системы координат;
- определение геоцентрического радиус-вектора ЛА.
ФМ ПОИ обеспечивает:
- определение составляющих векторов абсолютной и относительной, линейной и угловой скоростей и углового положения ЛА по информации ИНС и/или ИКВ;
- определение составляющих вектора воздушной скорости в связанной, горизонтированной, географической и ортодромической системах координат по информации от СВС;
- определение составляющих путевой скорости в связанной, горизонтированной, географической и ортодромической системах координат по информации от ДИСС.
ФМ КОИ строится на основе решения задачи стохастического оценивания с помощью нестационарных помехозащищенных фильтров, построенных на основе динамических моделей погрешностей комплексируемых систем, и имеет в зависимости от количества входящих в состав комплекса ИНС, ИКВ и СВС несколько каналов КОИ: канал(ы) комплексирования ИНС и/или ИКВ с датчиками скоростной и позиционной коррекции и канал(ы) комплексирования СВС с датчиками скоростной и позиционной коррекции.
Каждый из каналов КОИ обеспечивает:
- прогнозирование оценок ошибок автономной НПС (ИНС/ИКВ/СВС) в соответствии с постулированной математической моделью ее погрешностей;
- прогнозирование ковариаций ошибок автономной НПС;
- измерение ошибок автономной НПС по данным от корректирующих ПНС;
- вычисление коэффициентов усиления фильтров;
- формирование корректирующих сигналов;
- формирование оценок ошибок автономной НПС;
- вычисление ковариаций ошибок автономной НПС;
- формирование уточненных значений информационных параметров автономной НПС.
ФМ ОНП обеспечивает:
- определение составляющих скорости ЛА в географической, ортодромической и других системах координат;
- определение путевой скорости и угла сноса ЛА;
- определение текущих географических и ортодромических координат и других навигационно-пилотажных параметров ЛА;
- определение географического и ортодромического курсов ЛА.
ФМ УПР обеспечивает:
- решение задачи взлета ЛА с аэродрома по заданной траектории;
- прохождение маршрута полета, заданного последовательностью НТ, путевым, маршрутным или комбинированным способами управления;
- повторный заход на НТ;
- выход в заданную НТ с управлением временем прибытия;
- решение задачи возврата ЛА на аэродром посадки с выполнением предпосадочного маневра и снижения по заданной траектории;
- решение задачи посадки ЛА на аэродром по заданной глиссаде;
- выполнение повторного захода на посадку.
ФМ КНТ обеспечивает:
- предполетный контроль НПС и комплекса в целом;
- автоматизированный функциональный контроль комплекса (режим тренаж);
- полетный контроль НПС и комплекса в целом.
ФМ УРК обеспечивает:
- задание вида подготовки, контроля и режима работы комплекса;
- ввод программы полета;
- ввод исходных данных;
- ввод априорных данных НПС;
- управление режимами работы НПС;
- задание режимов управления полетом.
ФМ ИОПР обеспечивает подготовку для экипажа ЛА информации, необходимой для эффективного решения навигационных задач и снижения психологической нагрузки на членов экипажа, включающей:
- состояние работоспособности БЦВС и НПС комплекса;
- время подготовки комплекса и его готовности к переводу в рабочий режим;
- режимы работы комплекса;
- режимы управления ЛА;
- состояние навигационной и воздушной обстановки;
- оценку ошибок определения основных навигационных параметров ЛА;
- время автономной работы комплекса после последней коррекции;
- готовность к работе корректирующих НПС и их фактическое использование;
- выбор "лучшей" НПС (при наличии нескольких однотипных).
ФМ ФВП обеспечивает:
- формирование кадра выдачи управляющих сигналов в систему автоматического управления (САУ) ЛА;
- формирование кадра выдачи информационных сигналов в систему отображения информации (СОИ);
- формирование информации для выдачи в подсистемы комплекса и другим потребителям навигационно-пилотажных параметров на борту ЛА;
- формирование информации для выдачи в контрольно-записывающую аппаратуру ЛА.
ФМ БДП обеспечивает упорядоченное хранение и предоставление по запросу другим ФМ данных о характеристиках НПС для КНПС УНК максимально возможного состава и выдаваемой ими в КИО информации - тип и назначение НПС, служебные адреса НПС в КИО, количество и характеристики формируемых и выдаваемых в КИО параметров, порядок их выдачи, частота их обновления и т.п.
ФМ СИНПС обеспечивает:
- сразу после подачи питания на УНК и завершения процессов начальной инициализации БЦВС, управляя ФМ ВВ, осуществляет начальное расширенное сканирование КИО для определения функционирующих НПС из комплекта НПС максимального состава;
- в процессе дальнейшей работы БЦВС, управляя ФМ ВВ, осуществляет периодическое сканирование КИО для выявления вновь включенных или выключенных НПС;
- формирование по результатам сканирования КИО идентифицирующих запросов в ФМ БДП на получение информации о функционирующих в составекомплекса НПС, например запрос об идентификации НПС, взаимодействующей с БЦВМ по последовательному цифровому каналу и выдающей информацию 32-разрядными словами в выявленной при сканировании КИО последовательности адресов этих слов или, например, запрос об идентификации НПС, взаимодействующей с БЦВМ по мультиплексному цифровому каналу и выдающей информацию 16-разрядными словами с выявленными при сканировании КИО адресом, подадресами и количеством слов в каждом подадресе;
- формирование по результатам сканирования КИО и полученной из ФМ БДП информации текущей информационной структуры комплекта НПС;
- управление ФМ ВВ и ФВП по вводу-выводу информации от/в НПС в соответствии с текущей информационной структурой комплекта НПС;
- передачу в другие ФМ БЦВМ идентифицирующей информации о функционирующих НПС.
ФМ УВИ на основе информации о функционирующих НПС, полученной от ФМ СИНПС, обеспечивает:
- контроль достоверности информации, вводимой от НПС по КИО;
- унификацию информации, принятой от различных НПС - преобразование форматов информации, циркулирующей в КИО, к форматам данных, используемых в ФМ, из состава унифицированного функционального "ЯДРА" БЦВМ;
- помехозащиту информации, вводимой от НПС по КИО - проверка, с физической точки зрения, допустимых пределов информации, допустимой скорости ее изменения и т.п.;
- временную синхронизацию информации, принятой от НПС по КИО - приведение информации, принятой от НПС, к единому моменту времени.
Таким образом, на примере технической реализации показано, что введение в состав УНК дополнительных ФМ обеспечивает повышение степени унификации комплекса и, как следствие, упрощение и снижение стоимости технологических процедур перепроектирования комплекса под потребности конкретного ЛА, а также расширение возможностей БЦВС по функциональной адаптации к текущей информационной структуре КНПС в конкретном полете.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И КОРРЕКТИРОВКИ ПОЛЕТНЫХ ЗАДАНИЙ, НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2747760C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590936C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2481558C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |

Изобретение относится к области приборостроения и может найти применение в составе комплексов навигационно-пилотажного оборудования летательных аппаратов (ЛА). Технический результат - расширение функциональных возможностей. Для этого унифицированный навигационный комплекс ЛА содержит взаимосоединенные по цифровым каналам информационного обмена (КИО) комплект навигационно-пилотажных систем (НПС) и бортовую цифровую вычислительную систему (БЦВС), причем комплект НПС включает навигационно-пилотажные системы (НПС) различных физических принципов действия, такие как инерциальные навигационные системы и курсовертикали, системы воздушных сигналов, спутниковые навигационные системы, радиотехнические системы ближней и дальней навигации, доплеровские измерители путевой скорости, радиовысотомеры, системы визуальной коррекции, корреляционно-экстремальные навигационные системы и радиотехнические системы посадки, а БЦВС включает вычислительно-логические функциональные модули (ФМ) ввода-вывода информации, подготовки комплекса, первичной обработки информации, комплексной обработки информации, определения параметров Земли, определения навигационных параметров, расчета параметров ортодромии, преобразования координат, определения управляющих параметров, контроля комплекса, управления режимами работы комплекса, информационного обеспечения принятия решений и формирования выходных параметров, дополнен введенными в состав БЦВС ФМ сканирования и идентификации подключенных к КИО НПС, ФМ базы данных протоколов информационного взаимодействия НПС и ФМ унификации входной информации от НПС. 3 ил.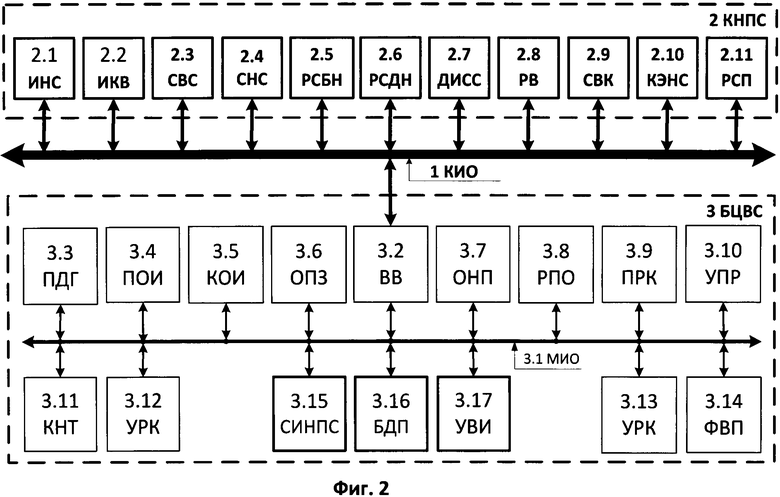
Унифицированный навигационный комплекс ЛА, содержащий взаимосоединенные входами-выходами по цифровым каналам информационного обмена (КИО) комплект навигационно-пилотажных систем (НПС) и бортовую цифровую вычислительную систему (БЦВС), причем комплект НПС состоит из комплекта инерциальных навигационных систем, комплекта инерциальных курсовертикалей, комплекта систем воздушных сигналов, комплекта спутниковых радионавигационных систем, комплекта радиотехнических систем ближней навигации, радиотехнической системы дальней навигации, доплеровского измерителя путевой скорости и сноса, комплекта радиовысотомеров, комплекта систем визуальной коррекции, корреляционно-экстремальной навигационной системы и комплекта радиотехнических систем посадки, а БЦВС включает взаимосоединенные входами-выходами по цифровой магистрали информационного обмена (МИО) вычислительно-логические функциональные модули (ФМ) ввода-вывода информации по КИО (ВВ), подготовки комплекса, первичной обработки информации, комплексной обработки информации, определения параметров Земли, определения навигационных параметров, расчета параметров ортодромии, преобразования координат, определения управляющих параметров, контроля комплекса, управления режимами работы комплекса, информационного обеспечения принятия решений и формирования выходных параметров (ФВП), отличающийся тем, что он дополнительно снабжен вновь введенным в состав БЦВС ФМ сканирования и идентификации подключенных к КИО НПС, который по входу-выходу соединен по МИО с ФМ ВВ и ФВП, а также с вновь введенными в состав БЦВС ФМ базы данных протоколов информационного взаимодействия НПС и ФМ унификации входной информации от НПС, который выходом соединен по МИО со всеми ФМ из состава БЦВС.
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| US 4821216 A1, 11.04.1989 | |||
| Селезнев В.П | |||
| Навигационные устройства | |||
| - М.: Машиностроение, 1974, с.268-288 | |||
| Ботуз С.П | |||
| Позиционные системы программного управления | |||
| - М.: ИПРЖ "Радиотехника", 1998, с.5-10 | |||
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |

