Изобретение относится к области авиационного приборостроения.
Известны способы и системы планирования применения, подготовки полетных заданий, навигации и управления отдельными летательными аппаратами (ЛА) и группами ЛА, реализующие их полет по различным маршрутам. Принципы функционирования бортового оборудования ЛА при полете по маршруту, а также описание некоторых из систем, реализующих процедуры планирования применения групп ЛА, подготовки полетных заданий ЛА для полета по маршруту и обеспечивающих управление ЛА при полете по маршруту, приведены в источниках информации.
В работах [1, 2] описаны различные теоретические и практические аспекты управления ЛА при полете по маршруту. В патентах [7, 9] и работах [6, 8] описаны наземные системы подготовки полетных заданий (ППЗ) для ЛА и системы планирования применения (ПП) ЛА и групп ЛА. В патентах [3, 4, 5] описаны бортовые системы, обеспечивающие полет ЛА по маршруту в соответствии с полетным заданием (ПЗ).
В патенте [7] представлена блок-схема системы, предназначенной для подготовки, навигации и управления летательного аппарата. Система состоит из комплекса подготовки полетного задания (КППЗ) и бортового навигационного комплекса (НК) ЛА, связь между которыми осуществляется посредством переносного носителя полетного задания (НПЗ) типа универсальной флэш-карты, причем КППЗ состоит из универсального устройства записи информации на НПЗ и универсальных интерфейсных устройств, соединенных входами-выходами с электронным блоком (ЭБ), а НК состоит из взаимосоединенных по каналу информационного обмена (КИО) устройства считывания информации с НПЗ, комплекта многофункциональных индикаторов, комплекта пилотажно-навигационных систем, бортовой радиотехнической системы связи и бортовой цифровой вычислительной системы (БЦВС). В состав ЭБ дополнительно введены вычислительно логический функциональный модуль (ВЛФМ) формирования графического образа траектории произвольной формы (ТПФ) и ВЛФМ декомпозиции графического образа ТПФ на несколько прямолинейных микротраекторий (ПМТ), а в состав БЦВС дополнительно введен второй ВЛФМ декомпозиции графического образа ТПФ. При этом точки взаимосоединения ПМТ при полете по ТПФ используются в системе как навигационные точки, эквивалентные по свойствам «стандартным» навигационным точкам из основного маршрута полета.
Недостатком описанной комплексной системы подготовки, навигации и управления летательного аппарата является отсутствие в ней элементов, осуществляющих распределение целевых задач между летательными аппаратами, которые действуют в составе группы.
Наиболее близким к предлагаемой автоматизированной системе планирования применения и подготовки полетных заданий группе летательных аппаратов по технической сущности является устройство, описанное в патенте [9], которое выбирается в качестве прототипа с учетом только существенных для предлагаемого изобретения признаков.
Устройство-прототип состоит из нескольких РМО подготовки полетного задания и бортовых НК, связь между которыми осуществляется посредством НПЗ. РМО ППЗ соединены входами-выходами с электронным вычислительным блоком программно-аппаратного комплекса планирования применения (ПАК ПП), включающим взаимосоединенные входами-выходами по универсальной магистрали информационного обмена ВЛФМ распределения задач между летательными аппаратами в группе, ВЛФМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы летательных аппаратов, ВЛФМ расчета показателя выживаемости группы летательных аппаратов, ВЛФМ формирования плановых таблиц полетов для групп летательных аппаратов.
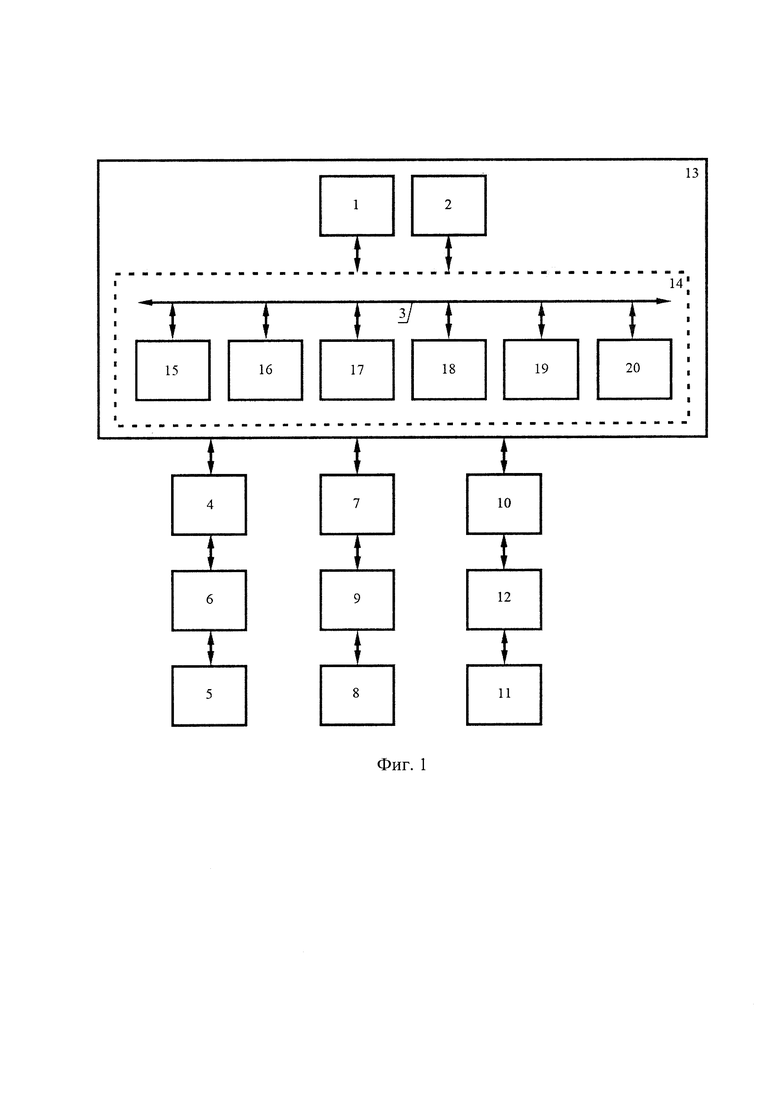
На фиг. 1 представлена блок-схема устройства-прототипа, на которой обозначены:
1 - универсальный видеомонитор (ВМ);
2 - комплект универсальных устройств управления (УУ);
3 - универсальная магистраль информационного обмена (УМИО);
4 - РМО ППЗ для ЛА 1-го типа (РМО ППЗ 1);
5 - навигационный комплекс ЛА 1-го типа (НК 1);
6 - НПЗ для ЛА 1-го типа (НПЗ 1);
7 - РМО ППЗ для ЛА 2-го типа (РМО ППЗ 2);
8 - навигационный комплекс ЛА 2-го типа (НК 2);
9 - НПЗ для ЛА 2-го типа (НПЗ 2);
10 - РМО ППЗ для ЛА К-го типа (РМО ППЗ К);
11 - навигационный комплекс ЛА К-го типа (НК К);
12 - НПЗ для ЛА К-го типа (НПЗ К);
13 - программно-аппаратный комплекс планирования применения (ПАК ПП) группы ЛА;
14 - электронный вычислительный блок (ЭВБ);
15 - ВЛФМ распределения задач между ЛА в группе (РЗ);
16 - ВФЛМ универсальной базы данных (УБД);
17 - ВЛФМ оценки досягаемости точки назначения (ОДТН);
18 - ВЛФМ расчета эффективности применения группы ЛА (РЭП);
19 - ВЛФМ расчета показателя выживаемости группы ЛА (РПВ);
20 - ВЛФМ формирования плановых таблиц полетов для групп ЛА (ФПТ).
Система-прототип функционирует следующим образом.
Оператор ПАК ПП 13, получив предварительное распоряжение о содержании задания группе ЛА, в процессе интерактивного взаимодействия посредством УУ 2 выводит на экран ВМ 1 перечень задач для отдельных ЛА из состава группы, а затем инициирует распределение этих задач с помощью ВЛФМ РЗ 15; при этом учитываются летно-технические данные ЛА различных типов, места их базирования (пуска), расположение объектов воздействия, предоставляемые ВЛФМ УБД 16, а также оперативно-тактическая и гидрометеорологическая информация.
Расчет маршрутов полета и пространственно-временных графиков полета ЛА осуществляется операторами соответствующих РМО ППЗ ЛА, получающими задания от ВЛФМ РЗ 15.
Досягаемость точки назначения для каждого ЛА из состава группы проверяется путем сравнения в ВФЛМ ОТДН 17 потребного запаса топлива, необходимого для полета по маршрутам полета, с запасом топлива в момент начала полета ЛА с учетом навигационного остатка.
В ВЛФМ РЭП 18 выполняется расчет показателей эффективности решения поставленных задач каждым из ЛА группы и группы ЛА в целом при выбранном варианте их распределения по объектам воздействия с учетом летно-технических данных ЛА, маршрутов полета и пространственно-временных графиков полета, а также характеристик объектов воздействия.
В ВЛФМ РПВ 19 рассчитываются показатели выживаемости ЛА на маршрутах полета к объектам воздействия и суммарные потери группы при выполнении задания.
По результатам выполненных расчетов в ВЛФМ ФПТ 20 формируется плановая таблица полетов, представляющая собой совокупность данных о решаемой каждым ЛА задаче, объекте воздействия и показателях эффективности и выживаемости ЛА.
При необходимости оператор ПАК ПП 13 с помощью УУ 2 и ВФЛМ УБД 16, используя информацию от ВЛФМ ОДТН 17, ВЛФМ РЭП 18 и ВЛФМ РПВ 19, может изменить задачи некоторым или всем ЛА из состава группы, назначив им объекты воздействий по своему усмотрению. После этого вновь производится расчет показателей эффективности и выживаемости для группы и формирование откорректированных плановых таблиц в ВЛФМ ФПТ 20.
Изобретение направлено на решение следующей технической проблемы: расширение технических возможностей системы путем дополнения ее средствами формирования замысла действий группы ЛА, а также средствами определения точек назначения для всех ЛА группы на объектах воздействия.
Техническую проблему в предлагаемом изобретении предлагается решить путем ввода в состав электронного вычислительного блока дополнительных ВЛФМ, а именно ВЛФМ формирования сценария применения группы ЛА и ВЛФМ определения точек назначения на объекте воздействия.
Все ВЛФМ, входящие в состав ЭВБ, исполнены по стандартным вычислительным схемам на основе процессоров и запоминающих устройств.
Сущность предлагаемого изобретения поясняется чертежом.
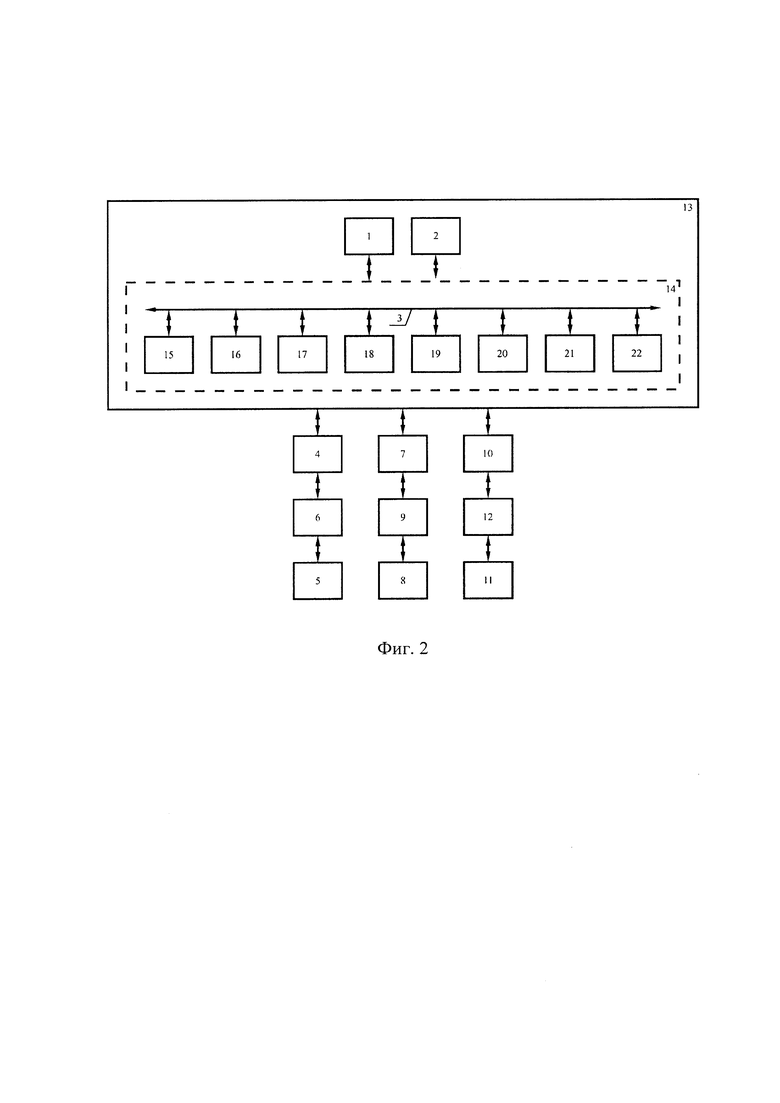
На фиг. 2 представлена блок-схема предлагаемого устройства, позициями обозначены:
1 - универсальный видеомонитор (ВМ);
2 - комплект универсальных устройств управления (УУ);
3 - универсальная магистраль информационного обмена (УМИО);
4 - РМО ППЗ для ЛА 1-го типа (РМО ППЗ 1);
5 - навигационный комплекс ЛА 1-го типа (НК 1);
6 - НПЗ для ЛА 1-го типа (НПЗ 1);
7 - РМО ППЗ для ЛА 2-го типа (РМО ППЗ 2);
8 - навигационный комплекс ЛА 2-го типа (НК 2);
9 - НПЗ для ЛА 2-го типа (НПЗ 2);
10 - РМО ППЗ для ЛА К-го типа (РМО ППЗ К);
11 - навигационный комплекс ЛА К-го типа (НК К);
12 - НПЗ для ЛА К-го типа (НПЗ К);
13 - программно-аппаратный комплекс планирования применения (ПАК ПП) группы ЛА;
14 - электронный вычислительный блок (ЭВБ);
15 - ВЛФМ распределения задач между ЛА в группе (РЗ);
16 - ВФЛМ универсальной базы данных (УБД);
17 - ВЛФМ оценки досягаемости точки назначения (ОДТН);
18 - ВЛФМ расчета эффективности применения группы ЛА (РЭП);
19 - ВЛФМ расчета показателя выживаемости группы ЛА (РПВ);
20 - ВЛФМ формирования плановых таблиц полетов для групп ЛА (ФПТ);
21 - ВЛФМ формирования сценария применения группы ЛА (ФСП);
22 - ВЛФМ определения точек назначения на объекте воздействия (ОТН).
С учетом только значимых для изобретения признаков, техническая проблема решается благодаря тому, что автоматизированная система планирования применения и подготовки полетных заданий группе ЛА, состоящая из нескольких РМО ППЗ для ЛА и нескольких сменных НПЗ, посредством которых ПЗ передается в бортовые НК ЛА, и программно-аппаратного комплекса планирования применения группы ЛА, включающего универсальный видеомонитор (ВМ), комплект универсальных устройств управления (УУ) и электронный вычислительный блок (ЭВБ), в состав которого входит универсальная магистраль информационного обмена (УМИО) с подключенными к ней ВЛФМ распределения задач (РЗ) между ЛА в группе, ВФЛМ универсальной базы данных (УБД), ВЛФМ оценки досягаемости точки назначения (ОДТН), ВЛФМ расчета эффективности применения (РЭП) группы ЛА, ВЛФМ расчета показателя выживаемости (РПВ) группы ЛА и ВЛФМ формирования плановых таблиц (ФПТ) полетов для групп ЛА, дополнительно снабжена ВЛФМ формирования сценария применения (ФСП) группы ЛА и ВЛФМ определения точек назначения (ОТН) на объекте воздействия.
Логика функционирования предлагаемого устройства в его ограничительной части соответствует вышеприведенному описанию системы-прототипа. Вновь введенные в состав системы блоки обеспечивают системе дополнительные свойства и функционируют следующим образом.
Оператор ПАК ПП 13, получив предварительное распоряжение о содержании задания группе ЛА, в процессе интерактивного взаимодействия посредством УУ 2 выводит на экран ВМ 1 состав группы ЛА с точками взлета (аэродромами) и перечень объектов воздействия, классы которых указаны в предварительном распоряжении, а затем инициирует формирование сценария с помощью ВЛФМ ФСП 21, при этом учитываются летно-технические данные ЛА различных типов, точки взлета (аэродромы), расположение объектов воздействия, предоставляемые ВЛФМ УБД 16, а также оперативно-тактическая и гидрометеорологическая информация.
Рациональные точки назначения для каждого ЛА из состава группы определяются в ВЛФМ ОТН 22 путем расчета и сравнения показателя эффективности воздействия на конкретный объект при различном расположении точек назначения.
При необходимости оператор ПАК ПП 13 с помощью УУ 2 и ВФЛМ УБД 16, используя информацию от ВЛФМ ФСП 21 и ВЛФМ ОТН 22, может изменить задачи и точки назначения некоторым или всем ЛА из состава группы, назначив им объекты воздействий по своему усмотрению. После этого вновь производится расчет показателей эффективности и выживаемости для группы и формирование откорректированных плановых таблиц в ВЛФМ ФПТ 20.
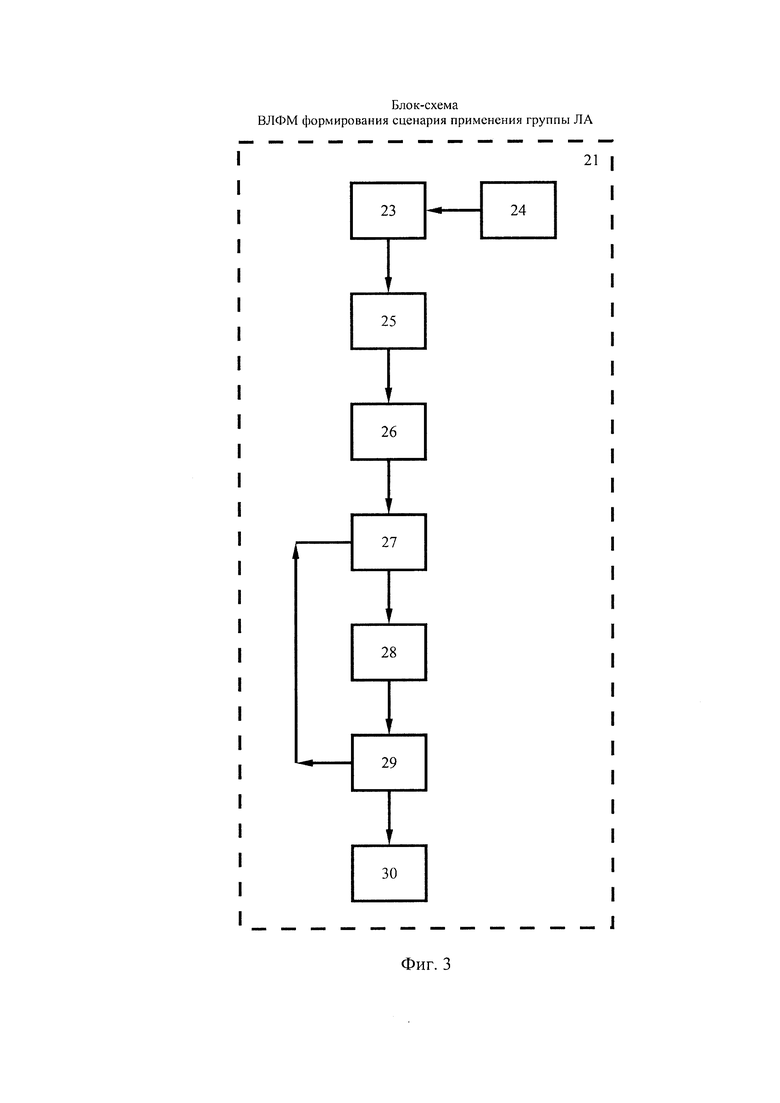
На фиг. 3 представлена блок-схема ВЛФМ ФСП 21, на которой обозначены:
21 - ВЛФМ формирования сценария применения группы ЛА (ФСП);
23 - перечень классов объектов воздействия;
24 - база данных объектов воздействия;
25 - фильтр по рекомендованным районам расположения объектов воздействия;
26 - фильтр по объектам воздействия из класса;
27 - цикл по отобранным объектам воздействия;
28 - расчет потребного числа ЛА на объект воздействия;
29 - расчет показателя эффективности воздействия на объект;
30 - перечень отобранных объектов воздействия, их координат и потребное число ЛА.
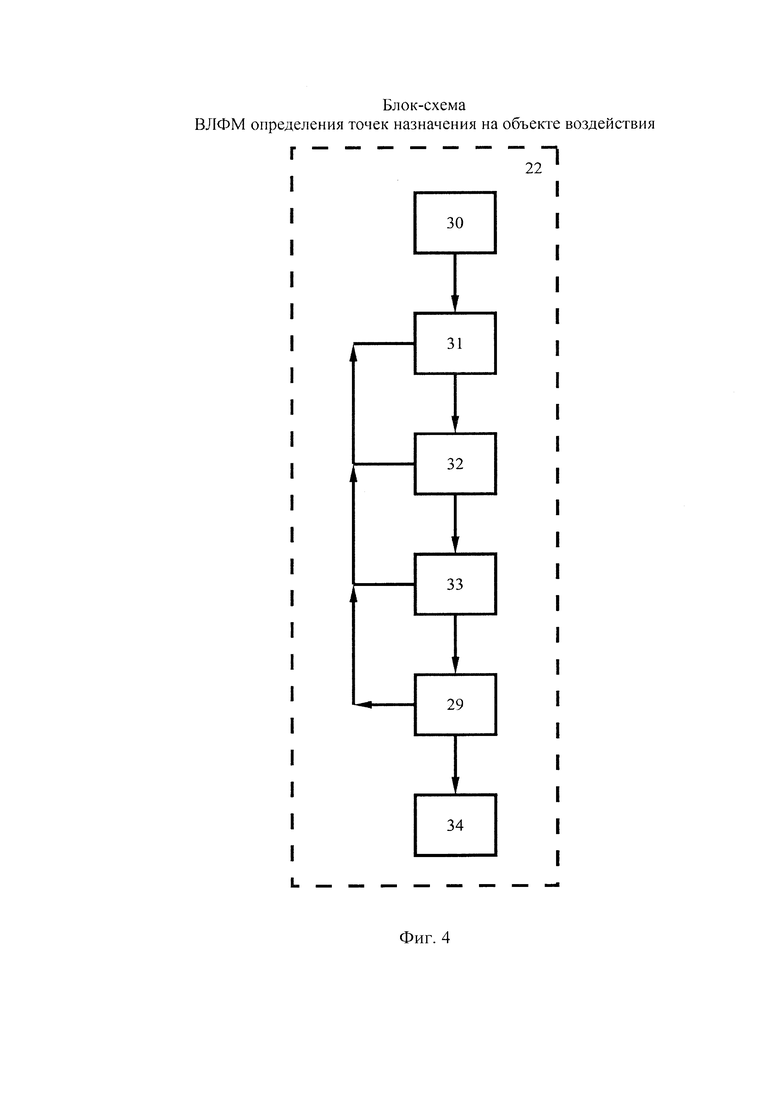
На фиг. 4 представлена блок-схема ВЛФМ ОТН 22, на которой обозначены:
22 - ВЛФМ определения точек назначения на объекте воздействия (ОТН);
29 - расчет показателя эффективности воздействия на объект;
30 - перечень отобранных объектов воздействия, их координат и потребное число ЛА;
31 - цикл по объектам воздействия;
32 - цикл по номерам ЛА, выделенным на объект воздействия;
33 - цикл по возможным точкам назначения на объекте воздействия;
34 - перечень точек назначения для ЛА.
Таким образом, на примере реализации показано достижение технического результата.
Источники информации:
1. Батенко А.П. Управление конечным состоянием движущихся объектов, М.: Советское радио, 1977.
2. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984.
3. Комплексная система подготовки и навигации ЛА. Патент РФ на изобретение №2434202. ОАО «РПКБ», 2010.
4. Устройство управления траекторией ЛА при полете по маршруту. Патент РФ на изобретение №2444044. ОАО «РПКБ», 2010.
5. Комплексная система навигации и управления ЛА. Патент РФ на изобретение №2481558. ОАО «РПКБ», 2011.
6. Усовершенствованная система планирования полетного задания. Сб. «Новости зарубежной науки и техники», ГосНИИАС, №11, 1992, с. 11-15.
7. Комплексная система подготовки, навигации и управления ЛА. Патент РФ на изобретение №2614194. АО «РПКБ», 2015.
8. Будаев Д.С., Вощук Г.Ю., Гусев Н.А., Мочалкин А.Н. Мультиагентная система согласованного управления группой беспилотных летательных аппаратов. Труды XVIII Международной конференции «Проблемы управления и моделирования в сложных системах» - Самара: ОФОРТ, 2016. С. 180-190.
9. Комплексная система планирования применения и подготовки полетных заданий группе летательных аппаратов. Патент РФ на изобретение №2773453. АО «КТРВ», 2022.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И КОРРЕКТИРОВКИ ПОЛЕТНЫХ ЗАДАНИЙ, НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2747760C1 |
| Комплексная система подготовки, навигации и управления летательного аппарата | 2015 |
|
RU2614194C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| Способ формирования полетной траектории летательного аппарата | 2015 |
|
RU2611453C1 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2649287C2 |
Автоматизированная система планирования применения и подготовки полетных заданий группе летательных аппаратов содержит программно-аппаратный комплекс планирования применения группы летательных аппаратов (ПАК ПП ЛА), включающий универсальный видеомонитор, комплект универсальных устройств управления, универсальную магистраль информационного обмена, вычислительно-логические функциональные модули (ВЛФМ): ВЛФМ распределения задач между ЛА в группе, ВЛФМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы ЛА, ВЛФМ показателя выживаемости группы, ВЛФМ формирования плановых таблиц полетов для групп ЛА, ВЛФМ формирования сценария применения группы ЛА, ВЛФМ определения точек назначения на объекте воздействия, а также содержит группы взаимодействия с летательными аппаратами, каждая из которых включает рабочее место оператора, носитель полетного задания, навигационный комплекс ЛА соответствующего типа и соединена с ПАК ПП ЛА. Обеспечивается расширение технических возможностей системы, повышение эффективности и выживаемости группы ЛА. 4 ил.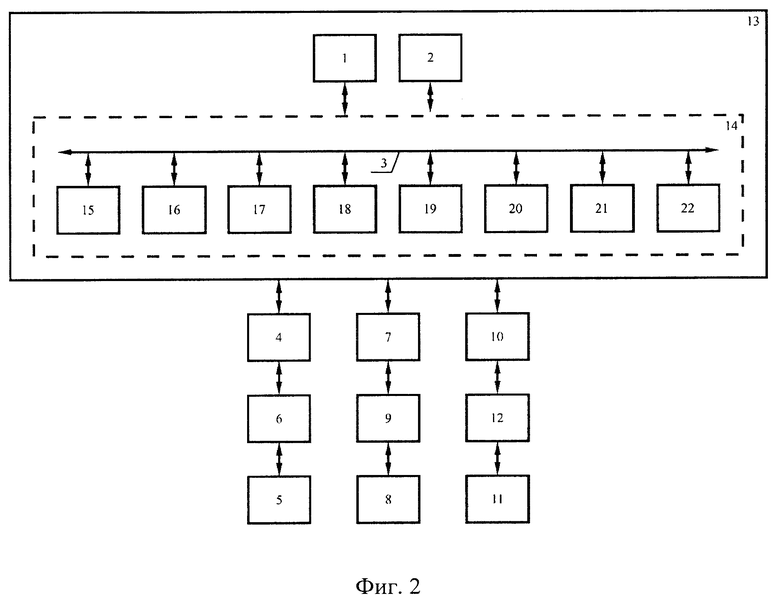
Автоматизированная система планирования применения и подготовки полетных заданий группе летательных аппаратов, состоящая из нескольких рабочих мест оператора подготовки полетных заданий для летательных аппаратов в количестве, соответствующем используемым типам летательных аппаратов, такого же количества сменных носителей полетных заданий, посредством которых полетное задание передается в бортовые навигационные комплексы летательных аппаратов, и программно-аппаратного комплекса планирования применения группы летательных аппаратов, включающего универсальный видеомонитор, комплект универсальных устройств управления и электронный вычислительный блок, в состав которого входит универсальная магистраль информационного обмена с подключенными к ней вычислительно-логическими функциональными модулями (ВЛФМ), а именно: ВЛФМ распределения задач между летательными аппаратами в группе, ВФЛМ универсальной базы данных, ВЛФМ оценки досягаемости точки назначения, ВЛФМ расчета эффективности применения группы летательных аппаратов, ВЛФМ расчета показателя выживаемости группы летательных аппаратов, ВЛФМ формирования плановых таблиц полетов для групп летательных аппаратов, отличающаяся тем, что в состав электронного вычислительного блока дополнительно введены ВЛФМ формирования сценария применения группы летательных аппаратов и ВЛФМ определения точек назначения на объекте воздействия, при этом ВЛФМ формирования сценария применения группы летательных аппаратов содержит перечень классов объектов воздействия, базу данных объектов воздействия, фильтр по рекомендованным районам расположения объектов воздействия, фильтр по объектам воздействия из класса, цикл по отобранным объектам воздействия, расчет потребного числа летательных аппаратов на объект воздействия, расчет показателя эффективности воздействия на объект, перечень отобранных объектов воздействия, их координат и потребное число летательных аппаратов, а ВЛФМ определения точек назначения на объекте воздействия содержит расчет показателя эффективности воздействия на объект, перечень отобранных объектов воздействия, их координат и потребное число летательных аппаратов, цикл по объектам воздействия, цикл по номерам летательных аппаратов, выделенным на объект воздействия, цикл по возможным точкам назначения на объекте воздействия, перечень точек назначения для летательных аппаратов.
| КОМПЛЕКСНАЯ СИСТЕМА ПЛАНИРОВАНИЯ ПРИМЕНЕНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ГРУППЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2773453C1 |
| СИСТЕМА ПЛАНИРОВАНИЯ И ПОДГОТОВКИ ПОЛЕТНЫХ ЗАДАНИЙ ТАКТИЧЕСКОЙ ГРУППЫ САМОЛЕТОВ | 1999 |
|
RU2147141C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И КОРРЕКТИРОВКИ ПОЛЕТНЫХ ЗАДАНИЙ, НАВИГАЦИИ И УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2747760C1 |
| CN 109242290 A, 18.01.2019 | |||
| CN 110362115 A, 22.10.2019. | |||

