Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных или аналогичных систем, предназначенных для определения местоположения летательных аппаратов с использованием радиоволн и управления движением летательных аппаратов.
Для обеспечения навигации летательных аппаратов (ЛА) требуется измерить текущие координаты для определения местоположения ЛА. В данном случае местоположение ЛА определяется с помощью радиоволн для применения в радиолокационных системах навигации.
В основе радиолокационных систем навигации лежат корреляционно-экстремальные способы навигации (КЭСН) для управления движением ЛА, обеспечивающие отыскание и слежение за оптимальным режимом движения ЛА [1]. При этом используют свойство корреляционной функции достигать максимума при нулевом значении аргументов. КЭСН обеспечивают измерение показателей экстремального режима ЛА, обработку указанной информации и выработку управляющего воздействия для коррекции координат местоположения ЛА. Наиболее часто используют КЭСН, основанные на сравнении текущих карт местности по геофизическим полям, полученным с использованием радиоволн, с эталонными картами той же местности, находящимися на ЛА, с помощью которых определяют местоположение ЛА и управляют движением ЛА путем коррекции их местоположения. Эталонные карты составляют и размещают на ЛА до начала движения над заданной поверхностью местности, а текущие получают во время движения ЛА. Сравнение путем наложения эталонных и текущих карт местности в последовательных точках траектории движения ЛА позволяет определить отклонение фактической траектории от заданной. Результатом указных операций является выработка поправки в координаты ЛА с целью коррекции движения ЛА.
Сравнение эталонной и текущей карт осуществляется посредством вычисления функционалов, достигающих глобального экстремума при полном совмещении карт. Для обработки информации наиболее предпочтительными являются разностные алгоритмы [1].
Известен способ навигации летательных аппаратов [2], использующийся в корреляционно-экстремальных системах навигации и заключающийся в определении местоположения ЛА с использованием радиоволн, излучаемых в виде одного луча (далее: радиоволн в виде луча), позволяющий снимать информацию о текущих точках траектории движения.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая до начала движения находится на ЛА.
Выбирают участок местности (мерный участок), который определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Измеряют с использованием одного луча радиоволн значения высот  («т» означает принадлежность к текущей карте) от ЛА до рельефа мерного участка в точках i (i=1, 2, 3, ...N) траектории движения ЛА (трассы
(«т» означает принадлежность к текущей карте) от ЛА до рельефа мерного участка в точках i (i=1, 2, 3, ...N) траектории движения ЛА (трассы  ).
).
Вычисляют отклонения  после прохождения ЛА мерного участка высот , измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА
после прохождения ЛА мерного участка высот , измеренные с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ЛА

Составляют для мерного участка текущую карту на основе вычисленных высот рельефа  после прохождения мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости ЛА и углах эволюции (тангаж, крен и курс), поступающих с периодом Тc.
после прохождения мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости ЛА и углах эволюции (тангаж, крен и курс), поступающих с периодом Тc.
Определяют на основе эталонной карты местности трассы  («э» означает принадлежность к эталонной карте), направленные вдоль мерного участка с шагом j (j=1, 2, 3, ...N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
(«э» означает принадлежность к эталонной карте), направленные вдоль мерного участка с шагом j (j=1, 2, 3, ...N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты).
Совмещают текущую и эталонную карты исследуемой местности.
Сравнивают текущее  и эталонное
и эталонное  значения путем корреляционно-экстремальной обработки реализаций с использованием разностных алгоритмов КЭСН.
значения путем корреляционно-экстремальной обработки реализаций с использованием разностных алгоритмов КЭСН.
Вычисляют сигнал коррекции местоположения ЛА на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Управляют движением ЛА путем коррекции его местоположения.
В [2] траектория движения ЛА разделена на две независимые части: участок измерения и участок коррекции.
Недостатками способа [2] являются.
Выработка сигнала коррекции только после пролета всего мерного участка.
Необходимость измерения абсолютной высоты ЛА над нулевым уровнем HО эталонной карты, а также необходимость в дополнительных вычислениях для определения средних уровней высот измеренной карты и эталонной карты, что не позволяет реализовать скользящую обработку поступающих данных.
Низкая точность составления текущей карты с использованием одного луча, поскольку для измерения высоты до исследуемой местности ширина луча радиоволн должна быть достаточно широкой. При этом снижается точность определения дальности до отдельных точек поверхности и, соответственно, снижается точность составления текущей карты.
Отсутствие информации о текущем местоположении ЛА в процессе движения над мерным участком (участок измерений), поскольку обработка измеренной информации осуществляется только после пролета всего мерного участка.
Низкое быстродействие определения местоположения ЛА, поскольку классический корреляционный алгоритм требует достаточного большого времени для выработки сигнала коррекции местоположения ЛА, обусловленного применением операции умножения.
Известен способ навигации ЛА [3], выбранный за прототип. Способ [3] заключается в следующем.
До начала движения ЛА используют информацию эталонной карты местности о навигационном поле земли. При этом эталонная карта исходно находится на ЛА.
Выбирают участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Текущая карта местности представлена матрицей H(nx, ny) размером Nx×Ny, а эталонная карта - матрицей НЭ(nx, ny) размером NxЭ×NyЭ. Дискретные значения nsx и nsy соответствуют горизонтальному и вертикальному смещению текущей карты относительно эталонной и отсчитываются от левого нижнего угла эталонной карты, для которого nsx=nsy=0.
Составляют текущую карту путем измерения параметров мерного участка с помощью радиоволн. При этом используемые радиоволны при излучении представляют собой лучи, которые воздействуют на исследуемую поверхность последовательно, число которых составляет не менее трех и определяется допустимым временем измерения местоположения ЛА при движении над мерным участком. Лучи радиоволн излучают последовательно, причем первоначально излучают луч, расположенный в плоскости, ортогональной плоскости горизонта исследуемой поверхности ЛА (первый луч). Потом излучают лучи, направления распространения которых лежат в одной плоскости, перпендикулярной направлению движения ЛА и не совпадающей с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ЛА) от первого луча, а другой части - справа (по направлению движения ЛА) от первого луча. Причем количество лучей справа и слева от центрального луча одинаковое. Радиоволны излучают в виде лучей, направления распространения которых являются некомпланарными. Вычисляют местоположение ЛА в плановых координатах мерного участка на основе измерений наклонных дальностей с помощью лучей радиоволн.
Текущую карту получают последовательно по мере прохождения отдельных частей мерного участка, а информация о мерном участке поступает до истечения его полного прохождения в темпе поступления измеренной информации.
Вычисляют по полученным данным о наклонных дальностях, а также об углах эволюции ЛА координаты точек измерений в системе координат, связанной с ЛА, а также значения высот в этих точках.
Вычисляют местные координаты проекции текущей точки траектории ЛА на плоскость плановых координат.
Вычисляют значения координат текущей карты по мере прохождения мерного участка путем вычисления разностей результатов многолучевых измерений. Для этого определяют разности измерений первого и второго (слева от первого) лучей, первого и третьего лучей (справа от первого), и так далее вплоть до определения разности измерений первого и предпоследнего (слева от первого) лучей, первого и последнего (справа от первого) лучей в текущем измерении, а также вычисляют разность измерений первого луча в текущем измерении и в предыдущем. Так, для трех лучей радиоволн определяют разности измерений первого и левого лучей, первого и правого (последнего) лучей текущего измерения, а также вычисляют разность измерений первого луча в текущем измерении и в предыдущем.
Проводят вычисления, аналогично описанным выше, по эталонной карте для каждого возможного положения ЛА внутри квадрата неопределенности (для каждой гипотезы).
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Выражение для показателя близости данных имеет вид

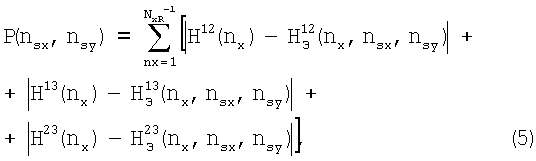
Здесь nhx и nhy - смещения точки Оr для различных гипотез; k - количество измерений;  - разность измеренных в k-м измерении значений высоты по левому и центральному лучам;
- разность измеренных в k-м измерении значений высоты по левому и центральному лучам;  - разность измеренных в k-м измерении значений высоты по правому и центральному лучам;
- разность измеренных в k-м измерении значений высоты по правому и центральному лучам;  - разность значений высоты, измеренных в k-м и (k-1)-м измерениях;
- разность значений высоты, измеренных в k-м и (k-1)-м измерениях;  - разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по левому и центральному лучам;
- разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по левому и центральному лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по правому и центральному лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по правому и центральному лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по центральному лучу.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по центральному лучу.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Выдают поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Управляют движением ЛА путем коррекции их местоположения (траектории движения) в заданных точках траектории по мере прохождения мерного участка.
К недостаткам способа [3] можно отнести снижение реальной точности по сравнению с расчетной за счет того, что в процессе движения ЛА за время между тактами могут происходить колебания ЛА относительно строительной оси и вдоль траектории движения, что приводит к погрешностям измерения при определении координат.
Техническим результатом предлагаемого изобретения является повышение точности способа навигации летательных аппаратов за счет того, что при вычислении сигнала коррекции местоположения летательных аппаратов с помощью радиоволн для управления движением определяют разности измерений между всеми лучами в одном (каждом) такте текущего измерения.
Технический результат достигается тем, что в способе навигации летательных аппаратов, заключающемся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью радиоволн, сравнении значений плановых координат текущей и эталонной карт, вычислении сигнала коррекции траектории движения путем определения разности результатов многолучевых измерений и управлении движением летательных аппаратов путем коррекции их местоположения, при вычислении сигнала коррекции местоположения летательных аппаратов с помощью радиоволн, излучаемых в виде лучей для измерения параметров мерного участка, направления распространения которых являются некомпланарными, определяют разности измерений между всеми лучами в одном такте текущего измерения, аналогичные вычисления производят по эталонной карте для каждого возможного положения летательного аппарата внутри квадрата неопределенности, и вычисляют показатель близости данных, используемые радиоволны при измерении параметров мерного участка излучают в виде лучей, количество которых составляет не менее трех, используемые радиоволны при измерении параметров мерного участка излучают в виде лучей, направления распространения которых составляют между собой и первым лучом одинаковые углы, используемые радиоволны при измерении параметров мерного участка излучают в виде лучей, направления распространения которых составляют между собой и первым лучом различные углы, используемые радиоволны при измерении параметров мерного участка излучают в виде лучей, первый из которых перпендикулярен плоскости горизонта исследуемой поверхности, а остальные лучи расположены в плоскости, не перпендикулярной плоскости горизонта исследуемой поверхности, причем линия пересечения плоскостей расположения всех лучей и горизонта перпендикулярна направлению движения летательных аппаратов, используемые радиоволны при измерении параметров мерного участка излучают в виде лучей, первый из которых расположен в плоскости, не перпендикулярной плоскости горизонта исследуемой поверхности, а остальные лучи расположены в плоскости, перпендикулярной плоскости горизонта исследуемой поверхности, причем линия пересечения плоскостей расположения всех лучей и горизонта перпендикулярна направлению движения летательных аппаратов.
Технический результат достигается тем, что при реализации способа навигации летательных аппаратов для составления текущей карты используют результаты многолучевых измерений параметров мерного участка при помощи радиоволн в данном текущем такте измерения, а для вычисления сигнала коррекции местоположения летательных аппаратов и управления их движением определяют разности результатов многолучевых измерений, полученных только в каждом отдельном такте без использования результатов измерения соседних (предыдущих) тактов измерения. В результате способ навигации позволяет управлять движением ЛА при прохождении мерного участка с высокой точностью за счет более точного составления текущей карты по сравнению с аналогом и прототипом.
КЭСН предназначен для уточнения местоположения ЛА, определенного иными средствами навигации, и определения поправок к координатам местоположения ЛА в пределах области, определяемой погрешностью этих средств навигации. Будем считать, что данная область имеет форму квадрата (квадрат неопределенности), сторона которого равна удвоенной погрешности иных средств навигации.
Способ навигации ЛА поясняют следующие чертежи:
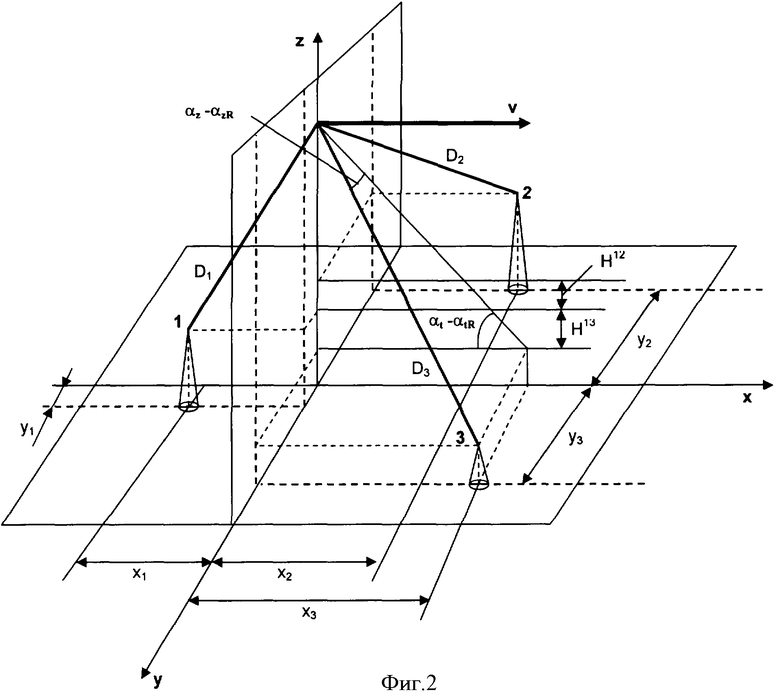
на фигуре 1 представлено взаимное расположение систем координат при движении ЛА;
на фигуре 2 показан вариант взаимного расположения лучей радиоволн при их излучении и измерении наклонных дальностей по отдельным лучам.
Способ навигации ЛА осуществляется следующим образом.
До начала движения ЛА используют информацию эталонной карты местности о навигационном поле земли, которая установлена на ЛА.
Выбирают участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений ЛА по дальности (квадрат неопределенности).
Составляют текущую карту путем измерения параметров мерного участка с помощью радиоволн. Лучи радиоволн излучают следующим образом. Первым излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта мерного участка (первый луч). Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ЛА) от первого луча, а другой части - справа (по направлению движения ЛА) от первого луча. Количество лучей, расположенных справа от первого луча, равно количеству лучей, расположенных слева от первого луча.
Вычисляют местоположение ЛА в плановых координатах мерного участка на основе измерений с помощью лучей радиоволн наклонных дальностей от ЛА до поверхности мерного участка. Для этого определяют разности измерений между всеми лучами: первого и второго лучей, первого и третьего лучей, второго и третьего лучей, и так далее в каждом текущем измерении. Так, для трех лучей радиоволн определяют разности измерений первого и левого (предпоследнего) лучей, первого и правого (последнего) лучей, а также вычисляют разность измерений левого и правого лучей в текущем конкретном измерении.
Проводят вычисления, аналогичные описанным выше, по эталонной карте для каждого возможного положения ЛА внутри квадрата неопределенности для каждой гипотезы.
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Управляют движением ЛА путем коррекции их местоположения (траектории движения). Управление движением ЛА осуществляют в процессе прохождения мерного участка.
Отметим, что радиоволны излучают на исследуемую поверхность в виде лучей, направления распространения которых составляют между собой и первым лучом одинаковые углы, или направления распространения которых составляют между собой и первым лучом различные углы, или первый из которых перпендикулярен плоскости горизонта исследуемой поверхности, а остальные лучи расположены в плоскости, неперпендикулярной плоскости горизонта исследуемой поверхности, причем линия пересечения плоскостей расположения всех лучей и горизонта перпендикулярна направлению движения летательных аппаратов, или первый из которых расположен в плоскости, не перпендикулярной плоскости горизонта исследуемой поверхности, а остальные лучи расположены в плоскости, перпендикулярной плоскости горизонта исследуемой поверхности, причем линия пересечения плоскостей расположения всех лучей и горизонта перпендикулярна направлению движения летательных аппаратов, или направления распространения которых являются некомпланарными (лучи расположены в разных плоскостях относительно друг друга).
Способ навигации реализуется следующим образом.
Реализацию способа навигации ЛА рассмотрим на примере составления текущей карты с помощью трех лучей радиоволн (с равными углами между левым и правым лучами относительно первого (центрального) луча), расположенных в разных плоскостях, находящихся под углом к плоскости горизонта исследуемой поверхности.
В течение времени Тx движения над мерным участком определяют текущую карту местности, для составления которой используют данные об измеренных значениях наклонной дальности с помощью лучей радиоволн, а также о значениях скорости и углах эволюций ЛА (тангаж, крен и курс), поступающих с периодом Тc.
Будем применять следующие системы координат, представленные на фиг.1: эталонной карты местности (прямоугольник); квадрата неопределенности (квадрат внутри прямоугольника); положений ЛА внутри квадрата неопределенности в момент начала измерений (гипотезы), обозначенных точками, и точек траектории ЛА, в которых производят измерения, обозначенных ромбами.
Определим местную систему координат (фиг.1) как левую прямоугольную декартовую систему координат Оrxryrzr с началом Оr, оси которой Orxr и Oryr лежат в плоскости местного горизонта (xr и yr являются плановыми координатами ЛА). Относительно плоскости Оrxryr определяют высоты местности мерного участка и ЛА. Поэтому указанные высоты являются соответствующими значениями координаты zr. Начало координат Or выбрано так, что ось Оryr направлена в расчетную точку появления ЛА над участком местности, соответствующим эталонной карте. Ось Oryr считается коллинеарной по отношению к горизонтальной составляющей расчетного вектора скорости ЛА (фиг.1). Плановая система координат неподвижна и связана с эталонной картой.
Для привязки плановых координат к эталонной карте используют дискретную систему координат, оси которой Nx и Ny сонаправлены с осями местной системы Orxryr (фиг.1). Нулевым индексам в дискретной системе координат соответствует левый нижний угол эталонной карты. Предполагаемое значение дискретных координат ЛА в момент начала сбора данных обозначено как (nxrЭ, nyrЭ). Поэтому координаты точки Оr (начало местной системы координат) в дискретной системе будут равны (nxrЭ, nyrЭ).
Координаты дискретной и местной систем координат связаны между собой соотношениями

где ΔЭ - размер ячейки сетки эталонной карты.
При определении координат точек измерений (точек пересечения подстилающей поверхности и лучей радиоволн) используют систему координат, связанную с текущим положением ЛА. Начало координат этой системы (точка Оa) поместим в текущую точку проекции траектории ЛА на плоскость плановых координат. Ось Оaxa по направлению совпадает с текущим направлением вектора скорости ЛА.
Связь между координатами системы, связанной с ЛА, и местной системы координат определяется в виде

где xrc и yrc - координаты проекции текущего положения ЛА на плоскость плановых координат; αx - курс ЛА в текущей точке измерений (угол между вектором скорости ЛА и осью Оrxr).
Для вычислений в КЭСН используют исходные данные в виде:
- эталонной карты, представляющей собой двумерный массив данных о рельефе местности, элементы которого являются высотами рельефа в узлах координатной сетки эталонной карты на плоскости Оrxryr (узлы совпадают с узлами дискретной системы координат);
- данных измерений, отличных от полученных с помощью лучей радиоволн, поступающих с каждым результатом измерений: значения угла αZ крена, угла αx курса, угла αt тангажа, скорости ν ЛА;
- данных, обусловленных особенностями решаемой задачи (общее время измерений Тx и интервал времени между измерениями Tc);
- данных, определяемых конструкцией ЛА (угол αR между лучами радиоволн - для углов αZ и αt);
- текущей карты, представляющей собой набор значений наклонных дальностей по всем трем лучам, полученных в каждом измерении.
В предлагаемом способе используют многолучевой режим измерения при помощи радиоволн, а при вычислении сигнала коррекции определяют разности результатов многолучевых измерений (дифференциально-разностный алгоритм обработки многолучевых измерений), который рассмотрим на примере трехлучевого КЭСН. Лучи радиоволн излучают последовательно в следующем порядке: первый (центральный) - в направлении движения ЛА, второй и третий, соответственно левый и правый относительно первого луча, направления распространения второго и третьего лучей не совпадают с направлением распространения первого луча.
Алгоритм КЭСН состоит в определении разностей измерений: первого и левого лучей, первого и правого лучей, левого и правого лучей текущего измерения. По эталонной карте для каждой гипотезы определяют положение координат в каждой точке, для которой рассчитываются высоты местности на мерном участке.
Показатель близости данных при этом имеет вид (5), где разности измерений лучей обозначены, согласно фиг.2, следующим образом: верхний индекс «12» означает вычитание результата измерения по первому лучу из результатов измерения по второму, а верхний индекс «13» означает вычитание результата по первому лучу из результата измерения по третьему лучу, верхний индекс «23» означает вычитание результата измерения по второму лучу из результатов измерения по третьему лучу.
Обработку данных каждого измерения производят следующим образом.
По полученным данным о наклонных дальностях, а также об углах эволюции вычисляют координаты точек измерений в системе координат, связанной с ЛА, а также измеренные значения высоты в этих точках.
Вычисляют местные координаты проекции текущей точки траектории ЛА на плоскость плановых координат.
Для каждой гипотезы, то есть для всех возможных положений ЛА внутри квадрата неопределенности, вычисляется одно слагаемое показателя близости. По завершении всех измерений проводят поиск экстремума показателя близости.
Выдают поправки к координатам местоположения ЛА.
Рассмотрим данный алгоритм подробно.
По измеренным значениям наклонных дальностей до элементов подстилающей поверхности Dj (j∈[1,3] - номер луча радиоволн) определяют координаты точек измерений в системе координат, связанной с ЛА, а также измеряемые значения высоты рельефа Hj.
Используя фиг.2, получим систему уравнений для каждого луча j в следующем виде

Аналогичным образом производят вычисления по данным двух других лучей радиоволн.
По полученным данным о скорости и углах эволюции определяют координаты проекции точки траектории ЛА на плоскость плановых координат.
Для первого измерения эти координаты считаются нулевыми (то есть положение ЛА во время первого измерения совпадает с началом координат системы Orxryr)

Местные координаты ЛА во время выполнения следующих измерений вычисляют по рекуррентным соотношениям

где i=1, 2, ... - номер текущего измерения.
Зная координаты точек измерений в системе координат, связанной с ЛА (Oaxaya), и местные координаты начала Оa, можно определить координаты точек измерений в местной системе координат в виде

Перебор гипотез заключается в следующем. Для каждого из возможных положений ЛА в пределах квадрата неопределенности вычисляют координаты (в дискретной системе координат) точек измерений, определенные ранее в местной системе координат. Для этого точку Or помещают поочередно в узлы координатной сетки внутри квадрата неопределенности и выполняют вычисление показателя близости данных. Координаты точек измерений в дискретной системе координат определяют как

где nhx и nhy - смещения точки Or для различных гипотез, определенные в количестве узлов сетки эталонной карты.
Приведенное выше общее выражение для показателя близости данных в данном случае имеет вид
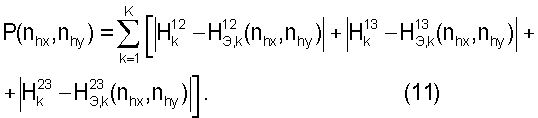
Здесь nhx и nhy - смещения точки Оr для различных гипотез; К - количество измерений;  - разность измеренных в k-м измерении значений высоты по первому и второму лучам;
- разность измеренных в k-м измерении значений высоты по первому и второму лучам;  - разность измеренных в k-м измерении значений высоты по первому и третьему лучам;
- разность измеренных в k-м измерении значений высоты по первому и третьему лучам;  - разность значений высоты, измеренных в k-м измерении значений высоты по второму и третьему лучам;
- разность значений высоты, измеренных в k-м измерении значений высоты по второму и третьему лучам;
 - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и второму лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и второму лучам;
 - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и третьему лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и третьему лучам;
 - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по второму и третьему лучам.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по второму и третьему лучам.
При поступлении результатов первого измерения для каждой гипотезы вычисляют выражение под знаком суммы и сохраняют в массиве данных показателя близости. Во время всех остальных измерений вновь получаемые значения выражения под знаком суммы складывают с соответствующими значениями в массиве P(nhx, nhy) и результат вновь записывают в массив данных показателя близости.
По завершении всех измерений производят поиск глобального экстремума показателя близости данных P(nhx, nhy), который представляет собой двумерную функцию от предполагаемого значения координат ЛА в момент начала измерений внутри квадрата неопределенности.
Таким образом, реализация способа навигации ЛА позволяет получить следующее.
1. Повышение точности измерения способа. Ранее в КЭСН использовались значения координат между двумя последовательными измерениями. В процессе движения происходят колебания ЛА относительно строительной оси и вдоль траектории движения, что ведет к тому, что происходят изменения углового положения при определении координат в разные моменты времени. В данном случае исключается сравнение результатов нескольких измерений, а происходит сравнение результатов между измеренными значениями за один отдельный такт измерений. Иными словами, алгоритм обработки полученных измерений стал более совершенным.
2. Уменьшение времени измерения способа. Это связано с тем, что все необходимые значения для получения поправок по координатам измеренной карты получаются за один такт и не требуется сравнение с результатами измерений, полученных в предыдущие такты. При этом для получения поправок в координаты измеренной карты используют сравнение результатов измерений между лучами в данном такте измерений, например между первым и вторым, между первым и третьим.
Результатом обработки информации по предложенному алгоритму КЭСН являются поправки к координатам местоположения ЛА в плановых координатах эталонной карты с точностью до одной ячейки сетки эталонной карты.
Рассмотренный дифференциально-разностный алгоритм КЭСН может быть реализован при измерении высот рельефа с помощью радиолокационных средств (благодаря вычислению разностей результатов измерений по различным лучам радиолокационной системы).
При использовании алгоритма КЭСН для выполнения вычислений не требуется знание результатов измерений над всем мерным участком. Поэтому данный дифференциально-разностный алгоритм позволяет проводить коррекцию местоположения ЛА уже после нескольких измерений наклонной дальности и может значительно сократить время, необходимое на выполнение алгоритма КЭСН.
Важно отметить, что рассмотренный способ навигации ЛА с предложенным алгоритмом сохраняет свои положительные свойства при различном количестве лучей радиоволн и обеспечивает работоспособность и для трех, и для большего количества (например, для пяти и более) лучей радиоволн. Применение многолучевого (количество лучей радиоволн составляет не менее трех) режима составления текущей карты местности позволяет осуществить наибольший охват исследуемой местности при минимальной ширине луча радиоволн и наибольшем энергетическом потенциале, что повышает точность определения дальности до отдельных точек поверхности и, соответственно, повышает точность составления текущей карты.
Таким образом, способ навигации летательных аппаратов обладает рядом существенных преимуществ перед аналогом и прототипом.
ЛИТЕРАТУРА
1. Белоглазов И.Н., Джангава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. - 328 С. (С.10-11, 19-22, 25-26, 30-34).
2. Ржевкин В.А. Автономная навигация по картам местности // Зарубежная радиоэлектроника. - 1981. - N10. - С.3-28.
3. Патент 2284544 РФ, МПК G01S 5/02, G01C 21/20. Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В., Рындык А.Г., Плужников А.Д., Потапов Н.Н., Егоров С.Н. // Изобретения. - 2005. - N27 от 27.09.2006 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2739872C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2014 |
|
RU2559820C1 |
Изобретение относится к области приборостроения и может быть использовано при построении различных радиолокационных (радарных) или аналогичных систем, предназначенных для навигации летательных аппаратов. Технический результат - повышение быстродействия и точности навигации летательных аппаратов. Для достижения данного результата используют эталонные карты местности, составленные до начала движения летательных аппаратов. Выбирают участки местности (мерный участок) эталонной карты. Составляют текущие карты - измеряют параметры мерного участка эталонной карты с помощью радиоволн, излучаемых в виде лучей. Сравнивают полученные значения мерного участка текущей и эталонных карт. Определяют сигнал коррекции траектории движения на базе определения разности результатов многолучевых измерений за один (каждый) такт измерений. Управляют движением летательных аппаратов путем коррекции их местоположения по мере прохождения мерного участка. 5 з.п. ф-лы, 2 ил.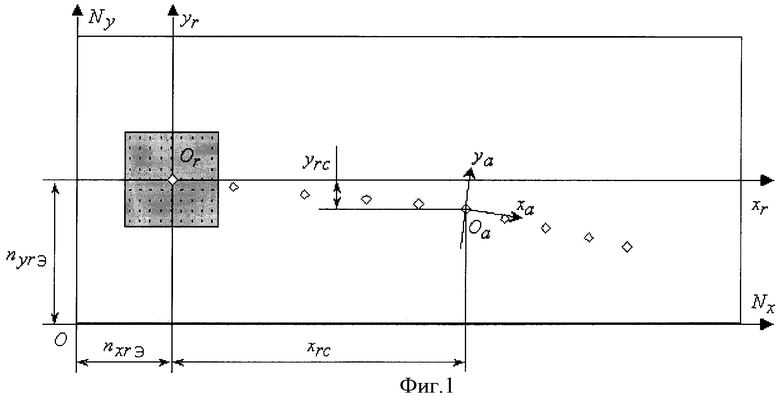
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| Ржевкин В.А | |||
| Автономная навигация по картам местности | |||
| - Зарубежная радиоэлектроника, 1981, №10, с.3-28 | |||
| Белоглазов И.Н., Джангава Г.И., Чигин Г.П | |||
| Основы навигации по геофизическим полям | |||
| - М.: Наука, 1985, с.328 | |||
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |

