ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[1] Настоящее изобретение относится к катетерной системе для картирования и удаления почечных нервов, расположенных в почечной артерии, чтобы повысить точность, эффективность и безопасность удаления почечного нерва.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[2] Гиперактивность почечного симпатического нерва представляет собой патофизиологический механизм в таких болезнях, как застойная сердечная недостаточность (ЗСН), гипертония, диабет, хроническая почечная недостаточность, аритмия, и других нарушениях работы сердца. В последнее время способ почечной симпатической денервации применяется для лечения этих заболеваний, так как данный терапевтический способ может снизить гиперактивность симпатического нерва. В целом, все заболевания, связанные с гиперактивностью симпатического нерва как одного из его патологических механизмов, можно лечить путем почечной симпатической денервации. Почечный симпатический нерв считается и эффектором, и рецептором симпатической нервной системы, поэтому патофизиологическое состояние сердечно-сосудистой системы и других органов можно регулировать посредством почечного симпатического нерва.
Возможные клинические применения процедуры почечной симпатической денервации
[3] Гипертония: Крум и соавт. изучили воздействие катетерной почечной симпатической денервации на кровяное давление у пациентов, страдающих гипертонией. Завершены и опубликованы два исследования: Symplicity HTN-1 (Крум и соавт., 2009; Садовский и соавт., 2011) и Symplicity HTN-2 (Эслер и соавт., 2010). Исследований Symplicity HTN-3 находится в процессе выполнения. Исследования Symplicity HTN-1 и Symplicity HTN-2 включали 50 и 106 пациентов, а периоды их наблюдения составляли 12 и 6 месяцев соответственно. До сих пор нет никаких сведений о Symplicity HTN-3. Все участники этих исследований были пациентами, страдающими гипертонией с устойчивостью к лекарственным средствам, т.е. их систолическое давление составляло > 160 мм рт. ст. даже после приема как минимум трех типов гипотензивных средств, включая диуретическое средство, либо пациентами, у которых невозможно было лечить гипертонию путем лекарственных терапий по разным причинам. В исследовании Symplicity HTN-1 у 45 пациентов, проходивших процедуру почечной денервации, среднее систолическое/диастолическое кровяное давление снизилось с 177/101 мм рт. ст. на -14/ 10, -21/-10, -22/-11, -24/-11 и -27/-17 мм рт. ст. в 1, 3, 6, 9 и 12 месяц соответственно после лечения. Уровень кровяного давления у 5 пациентов, которые не проходили такое лечение, повысился за тот же период (Крум и соавт., 2009). В исследовании Symplicity HTN-2, которое было рандомизированным исследованием с контрольной группой, амбулаторное мониторирование кровяного давления заменило ручное измерение давления крови в амбулаторных условиях, чтобы избежать «эффекта белого халата», а также воздействия почечной денервации на гипертонию, что впоследствии было подтверждено результатами Symplicity HTN-1. Через 1, 3 и 6 месяцев после процедуры, систолическое и диастолическое кровяное давление у 52 пациентов также снизилось на -20/-7, -24/-8 и -32/ 12 мм р. ст. соответственно с исходного уровня гипертонии (Эслер и соавт., 2010). Среднее время, потраченное на процедуру почечной денервации, составляло примерно 38 минут, использовалась низкая радиочастотная энергия (5~8 Вт), расстояние между точками удаления составляло как минимум 5 мм, на каждой стороне почечной артерии находилось по 4~6 точек удаления, а время удаления для каждой точки составляло 2 мин (Соботка и соавт., 2012). Этот способ был безопасным, и до настоящего времени таких побочных эффектов, как тромбоз сосудов, почечная эмболия или нарушение функции почек, не наблюдалось.
[4] Аномальный метаболизм глюкозы и диабет: Махфуд и соавт. обследовали 37 пациентов с различными клиническими синдромами диабета через 3 месяца после процедуры почечной симпатической денервации. Было установлено, что уровень глюкозы в крови натощак снизился с 118 до 108 мг/дл, уровень инсулина - с 20,8 до 9,3 мкМЕ/мл, уровень C-пептида - с 5,3 до 3,0 нг/мл, причем резистентность к инсулину уменьшилась с 6,0 до 2,4, а уровень глюкозы через 2 часа после перорального теста на толерантность к глюкозе также снизился на 27 мг/дл. В контрольной группе, кровяное давление и уровни этих маркеров метаболизма у 13 пациентов, которые не проходили процедуру почечной денервации, существенно не изменились (Махфуд и соавт., 2011). Результаты показали, что почечная денервация может улучшить резистентность к инсулину и метаболизм глюкозы у пациентов, страдающих диабетом.
[5] Синдром апноэ во время сна (САС): Витковский и соавт. установили, что процедура почечной симпатической денервации может в значительной степени устранить апноэ во время сна у пациентов с устойчивостью к лекарственным средствам, страдающих гипертонией. Они определили, что через 6 месяцев после почечной денервации индекс апноэ-гипопноэ (ИАГ) у 10 пациентов с устойчивостью к лекарственным средствам, страдающих гипертонией и апноэ во время сна, снизился с 16,3 раз/ч (перед процедурой) до 4,5 раз/ч. Эти результаты указывают на то, что у пациентов с устойчивостью к лекарственным средствам, страдающих гипертонией и апноэ во время сна, такой способ лечения может сократить степень апноэ во сне и в то же время уменьшить кровяное давление пациентов (Витковский и соавт., 2011).
[6] Сердечная недостаточность: Брандт и соавт. сообщили, что через 6 месяцев после процедуры почечной симпатической денервации у пациентов с устойчивостью к лекарственным средствам, страдающих гипертонией, индекс гипертрофии левого желудочка, толщина межжелудочковой перегородки, конечно-диастолический объем левого желудочка, период изоволюметрического расслабления желудочков и давление заполнения левого желудочка существенно снизились, в то время как фракция выброса сердца значительно увеличилась. Подобные изменения этих параметров не наблюдались у 18 пациентов, которые были в контрольной группе и не проходили такого лечения (Брандт и соавт., 2012). Эти результаты указывают на то, что процедура почечной симпатической денервации может в значительной мере улучшить работу сердца у пациентов, страдающих дисфункцией сердца. Symplicity-H и REACH являются текущими клиническими исследованиями, в которых изучается воздействие процедуры почечной симпатической денервации на пациентов с сердечной недостаточностью, однако результаты еще не были опубликованы (Соботка и соавт., 2012).
[7] Хронические болезни почек и почечная недостаточность: гиперактивность и избыточный тонус симпатического нерва тесно связаны с появлением и развитием хронической почечной недостаточности. Факторы, которые нарушают работу почек, могут привести к гиперактивности всей симпатической нервной системы через почечный нерв; патологически высокий общий симпатический тонус вреден для почек, что непосредственно влечет за собой нарушение их работы (Шляйх и соавт., 2009). Таким образом, снижение гиперактивности симпатической нервной системы путем процедуры почечной симпатической денервации может также быть новым способом лечения болезни почек и почечной недостаточности. Сообщалось, что через один год после процедуры почечной симпатической денервации у пациентов, страдающих хронической болезнью почек на поздней стадии и гипертонией с устойчивостью к лекарственным средствам, не было выявлено значительного изменения в расчетной скорости клубочковой фильтрации (рСКФ) (Геринг и соавт., 2012; Геринг и соавт., 2012, Дасгупта и соавт., 2012). Результат указывает на то, что такое лечение, вероятно, может замедлить развитие хронической болезни почек.
[8] Сердечно-сосудистые заболевания, связанные с высоким симпатическим тонусом: в исследованиях на животных и клинических исследованиях было установлено, что высокий симпатический тонус играет важную роль в появлении и развитии множества сердечно-сосудистых заболеваний (Д'Агроза, 1997, Эслер, 1992). Таким образом, почечная симпатическая денервация, которая может сбалансировать общий высокий симпатический тонус путем подавления гиперактивности симпатической нервной системы, может использоваться в лечении таких сердечно-сосудистых заболеваний, как аритмия и сердечная недостаточность.
[9] Тем не менее, при существующих процедурах удаления почечного нерва или других способах почечной денервации, расположение почечных нервов неизвестно, и хирург не знает, в какой части почечной артерии необходимо выполнять процедуру почечной денервации. Следовательно, операция проводится вслепую, что влечет необходимость дальнейшего улучшения и повышения эффекта лечения и безопасности. В частности, Бринкман и соавт. недавно провели операции по удалению почечных нервов у 12 пациентов, страдающих гипертоний, но после лечения кровяное давление снизилось только у 3 пациентов, в то время как у 7 пациентов снижения кровяного давления не наблюдалось (Бринкман и соавт., 2012). Так или иначе, исследователи сообщили об изменении кровяного давления у оставшихся 2 пациентов в своей публикации. Они полагали, что одна из причин заключалась в том, что операция по удалению почечного нерва проводилась не в месте нахождения почечного симпатического нерва. Бринкман и соавт. также высказали мнение, что в операции с использованием радиочастотной энергии не было известно, какие нервы были удалены: афферентные или эфферентные нервы почек. По сути, хирурги не имеют каких-либо клинических показателей для оценки и подтверждения того, что операция прошла успешно (Бринкман и соавт., 2012). Следовательно, с клинической точки зрения существует острая необходимость в разработке практичного и рационального способа картирования почечного симпатического и парасимпатического нерва, чтобы дать докторам возможность точно, эффективно и безопасно удалять почечные симпатические нервы, а также оценивать успешность проведения операции по почечной денервации.
В заявке на патент США №2011/0306851 A1 впервые рассматривается особый способ картирования почечного симпатического нерва и устройства для осуществления способа. В описании указано на выполнение экспериментов на свиньях для того, чтобы показать, как нужно определять положение почечных симпатических нервов, применяя стимуляцию электрическим током на почечной артерии и, в то же время, контролируя изменения артериального давления, частоту сердечных сокращений и другие физиологические параметры. Если заданное положение почечной артерии стимулируется, а кровяное давление и частота сердечных сокращений повышаются, это положение считается точкой нахождения почечного симпатического нерва. Такой способ и подходы к картированию почечного симпатического нерва были недавно подтверждены другими исследователями. Так, используя модель исследования на собаках, Тинуси и соавт. (2013) сообщили, что как только на определенных участках почечной артерии была выполнена внутрипочечная стимуляция электрическим током, кровяное давление и частота сердечных сокращений повысились. После удаления этих участков с помощью высокой радиочастоты и повторной стимуляции электрическим током, кровяное давление и частота сердечных сокращений больше не менялись.
[011] Почечная симпатическая денервация предусматривает другую возможную терапию, которая связана с гиперактивностью симпатической нервной системы, поэтому существует клиническая необходимость в устройствах с функциями, позволяющими выполнять внутрипочечную стимуляцию артерии и почечную денервацию. Устройства, использовавшиеся в двух вышеуказанных исследованиях, не были специально предназначены для картирования и удаления почечного нерва. Существующие катетерные и абляционные системы, использовавшиеся клиническими врачами, были предназначены для удаления тканей сердца и таких болезней сердца, как аритмия с крайне высокой энергией. Устройство и форма этих катетеров были рассчитаны не на анатомию и структуру почечной артерии, а скорее на анатомию и структуру коронарной артерии/ сердца. Эти катетерные системы имеют электроды на их кончиках, предназначенные для обнаружения аномальной электрической физиологии в тканях сердца; тем не менее, эти устройства не отвечают требованиям докторов по картированию и удалению почечных симпатических и парасимпатических нервов. Оптимальная катетерная система для картирования и удаления почечного нерва должна иметь двойное назначение: она должна выполнять стимуляцию электрическим током в почечной артерии для определения положения почечных симпатических и парасимпатических нервов, а также подавать энергию для их удаления. В то же время, форма катетера должна быть оптимизирована под анатомическую структуру почечной артерии. С помощью такой катетерной системы, врачи смогут выполнять внутрипочечную стимуляцию, контролировать физиологические изменения у пациента во время стимуляции, удалять почечные симпатические нервы и повторно стимулировать эти участки для оценки успешности выполнения почечной симпатической денервации. Однако, в настоящее время еще не разработана катетерная система, которая удовлетворяла бы этим требованиям.
[12] Во время процедуры почечной денервации должна учитываться анатомия и структура почечной артерии. У разных людей различия в почечной артерии могут быть существенными, например, различия в длине, диаметре и бифуркации. Пациенты, страдающие гипертонией, могут иметь имплантированные почечные стенты, стеноз почечной артерии, бляшки или другие анатомические отклонения. Если эти факторы не учитывать в некоторых существующих абляционных катетерных системах с крайне высокой энергией удаления (удаление почечного нерва является низкоэнергетической операцией с мощностью не более 8 Ватт), в процессе операции могут появиться серьезные побочные эффекты, такие как спазмы кровеносных сосудов, отек, оголение эндотелия почечной артерии, эмболия, разрыв, некроз и стеноз. Таким образом, абляционная катетерная система, спроектированная исходя из анатомии, структуры, физиологии и биологии почечной артерии, и предусматривающая низкую энергию, а также обе функции картирования и удаления, крайне необходима для осуществления почечной денервации.
[13] Подводя итог, следует отметить, что существующие, имеющиеся в продаже абляционные катетерные системы не подходят для картирования и удаления, так как они не спроектированы исходя из анатомии почечной артерии, и не предназначены для картирования почечных симпатических/парасимпатических нервов. Эти абляционные катетерные системы не могут отвечать клиническим потребностям почечной денервации, где необходима точность, эффективность и безопасность. Эти проблемы рассматриваются в настоящем изобретении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[14] Данное изобретение предусматривает катетерную систему для картирования и удаления почечных нервов, расположенных в почечной артерии, чтобы повысить точность, эффективность и безопасность операции по удалению почечного нерва с помощью катетера.
[15] В одном варианте осуществления, настоящее изобретения предусматривает устройство для картирования и удаления почечных нервов, расположенных в почечной артерии, которое включает направляющий катетер, катетер для картирования и удаления, рукоять и разъем, причем направляющий катетер имеет как минимум одну полость и дистальный конец с регулируемым изгибом; катетер для картирования и удаления находится в одной из полостей направляющего катетера, а его дистальный конец имеет один или несколько электродов, а также один или несколько датчиков; дистальный конец катетера для картирования и удаления изогнутый, может выдвигаться или втягиваться в направляющий катетер, и вращается по центральной оси открытого конца направляющего катетера; рукоять соединяет направляющий катетер с катетером для картирования и удаления и включает один или несколько управляющих компонентов для контроля движения направляющего катетера и катетера для картирования и удаления; разъем предназначен для подачи энергии на электрод.
[16] В другом варианте осуществления, рукоять дополнительно включает сосуд жидкостного обмена, соединенный с направляющим катетером для контроля жидкости, входящей или выходящей из направляющего катетера. В одном варианте осуществления настоящего изобретения, электроды предназначены для подачи электрической энергии, радиочастотной энергии, лазерной энергии, высокоинтенсивного фокусированного ультразвука или проведения криоабляции.
[17] В другом варианте осуществления, механизм герметизации выполнен между катетером для картирования и удаления и направляющим катетером для контроля входящей и выходящей жидкости.
[18] В еще одном варианте осуществления изобретения, материал на дистальном конце направляющего катетера самый мягкий, материал в средней части направляющего катетера обладает средней твердостью, а материал на ближнем конце направляющего катетера самый твердый, обладая твердостью материалов от 90А до 80D по шкале твердости Шора.
[19] В одном варианте осуществления, изгиб дистального конца катетера для картирования и удаления удерживается тяговым тросиком, один конец которого крепится к дистальному концу катетера для картирования и удаления, а другой - к пружине внутри рукояти, при этом, когда дистальный конец катетера для картирования и удаления втягивается в направляющий катетер, он закрепляется на месте и тянет тяговый тросик, сжимая пружину; когда дистальный конец катетера для картирования и удаления выдвигается из направляющего катетера, он открепляется, и пружина естественным образом разжимается и тянет тяговый тросик, изгибая дистальный конец катетера; или используя никель-титановый сплав с памятью формы с заданной формой так, чтобы дистальный конец мог сохранять заданный изгиб после установки на катетер.
[20] В другом варианте осуществления, управляющие компоненты включают ручку управления, отвечающую за изгиб дистального конца катетера. В еще одном варианте осуществления изобретения, управляющие компоненты включают ручку управления, отвечающую за выдвижение дистального конца катетера для картирования и удаления из направляющего катетера или втягивание в него. В другом варианте, управляющие компоненты включают ручку управления, отвечающую за вращение дистального конца катетера для картирования и удаления. В еще одном варианте, управляющие компоненты включают ручку управления, отвечающую за выдвижение дистального конца катетера для картирования и удаления из направляющего катетера или втягивание в него, а также вращение дистального конца катетера для картирования и удаления.
Настоящее изобретение также предусматривает способ применения устройства, предназначенный для картирования и удаления почечных нервов, расположенных в почечной артерии, и включающий следующие этапы: i) введение дистального конца направляющего катетера устройства в почечную артерию через брюшную аорту; ii) выдвижение катетера для картирования и удаления из направляющего катетера для установления хорошего контакта между электродом и стенкой почечной артерии; и (iii) подача энергии на электрод так, чтобы она попадала на стенку почечной артерии. В одном варианте осуществления изобретения, изгиб дистального конца направляющего катетера регулируется для облегчения проникновения в почечную артерию. В другом варианте, длина, на которую катетер для картирования и удаления выдвигается из направляющего катетера, регулируется для обеспечения выбора положения для установления хорошего контакта между электродом и стенкой почечной артерии. В еще одном варианте, катетер для картирования и удаления можно вращать вокруг центральной оси открытого конца направляющего катетера для выбора положения и установления хорошего контакта между электродом и стенкой почечной артерии. В другом варианте осуществления изобретения, энергия, подающаяся на стенку почечной артерии, включает энергию для стимуляции и удаления нерва. В следующем варианте осуществления изобретения, энергия включает электрическую энергию, радиочастотную энергию, лазерную энергию, ультразвуковую фокусированную волну высокой интенсивности или энергию для криоабляции. В еще одном варианте, вышеуказанный способ дополнительно включает этап перемещения направляющего катетера или катетера для картирования и удаления по завершении этапа (iii) для установления хорошего контакта между электродом и стенкой почечной артерии в другом месте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[22] На рис. 1-1 показан первый вариант осуществления катетерной системы по настоящему изобретению. Катетерная система включает направляющий катетер (11) с двумя полостями, в которых регулируется изгиб дистального конца; регулируемый катетер для картирования и удаления (12), находящийся в направляющем катетере (11), причем катетер для картирования и удаления регулируется и имеет дистальный конец с заданной формой; рукоять (13), которая содержит управляющие компоненты; сосуд жидкостного обмена (14), находящийся на конце рукояти и соединенный с направляющим катетером; разъем (15) на конце рукояти для соединения с катетером для картирования и удаления и тяговые тросики, соединяющие дистальный конец направляющего катетера с управляющими компонентами. Катетер для картирования и удаления задвигается в направляющий катетер, как показано на рисунке.
[23] На рис. 1-2 показан катетер по рис. 1-1, когда дистальный конец направляющего катетера (11) изогнут после вращения ручки управления (16).
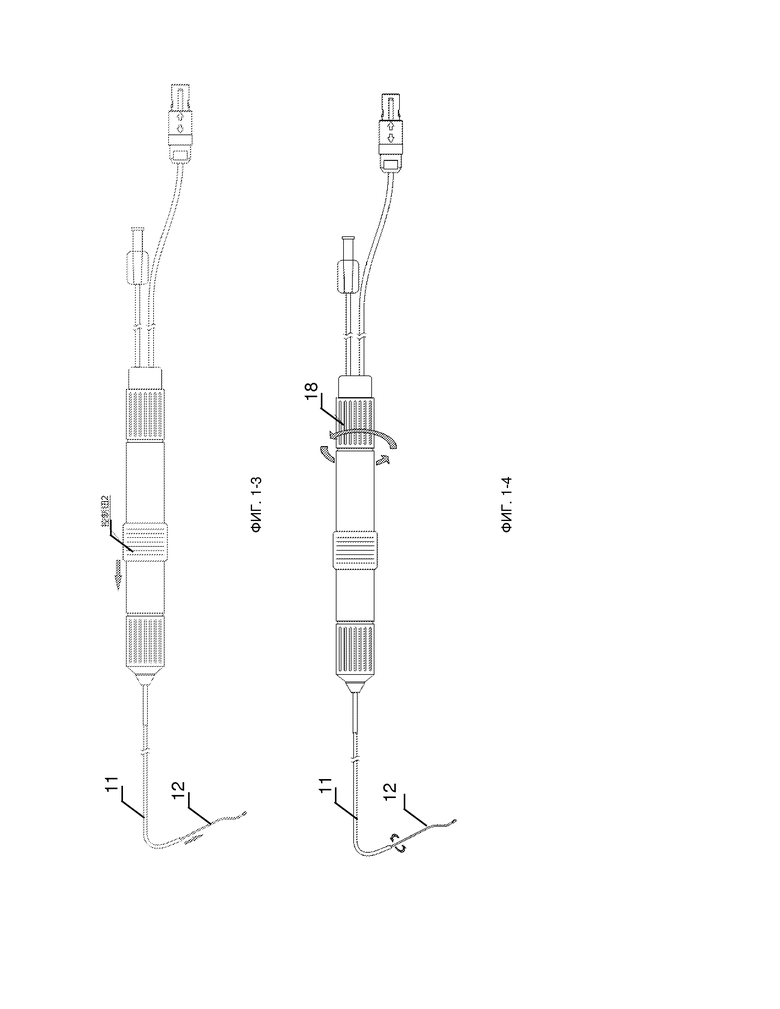
[24] На рис. 1-3 показан катетер по рис. 1-1, когда катетер для картирования и удаления (12) выдвинут из направляющего катетера (11) после нажатия на ручку управления (17).
[25] На рис. 1-4 показан катетер по рис. 1-1, когда катетер для картирования и удаления (12), выдвинутый из направляющего катетера (11), вращается вокруг центральной оси открытого конца направляющего катетера (11) после того, как ручка управления (18) повернута.
[26] На рис. 2-1 показан вариант осуществления дистального конца (21) катетера для картирования и удаления, в котором кончик катетера оснащен электродом (22) и датчиком температуры (23), а на дистальном конце катетера находится тяговый тросик (21) или устройство с памятью формы (25), которое обеспечивает фиксированный или регулируемый изгиб дистального конца.
[27] На рис. 2-2 показан вариант осуществления дистального конца катетера для картирования и удаления. Механизм герметизации между кончиком катетера для картирования и удаления (12) и направляющим катетером (11) формируется гладкой поверхностью электрода (22), плотно прилегающей к гладкому краю открытого конца направляющего катетера (11). Тяговый тросик (24) катетера для картирования и удаления и тяговый тросик (26) направляющего катетера изготовлены из нержавеющей стали или никель-титанового сплава.
[28] На рис. 3-1 показан другой вариант осуществления настоящего изобретения; катетер отличается от варианта осуществления по рис. 1 тем, что он имеет ручку управления (19), которая может двигаться вперед и назад и вращаться. Катетер для картирования и удаления задвигается в направляющий катетер, как показано на рисунке.
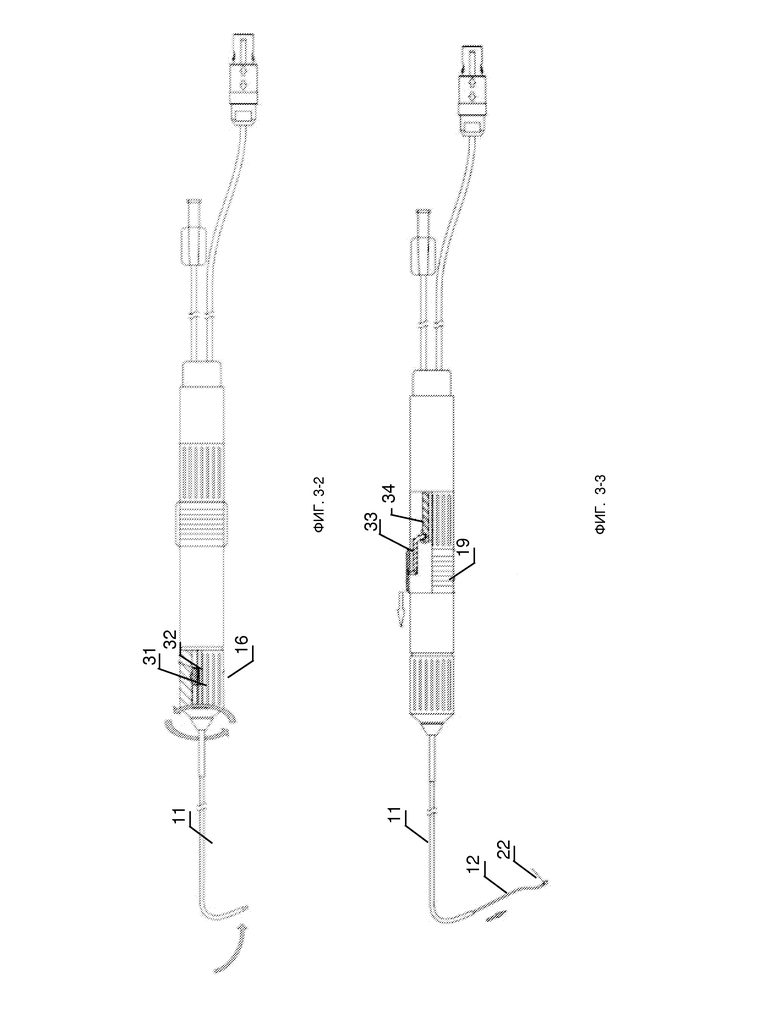
[29] На рис. 3-2 показан вариант осуществления механизма для управления изгибом направляющего катетера (11). Ручка управления (16) приводит в движение ползун (31) посредством механизма винтовой резьбы. Вращение ручки управления (16) линейно двигает ползун (31) по направляющей (32). Один конец тягового тросика крепится к ползуну (31), в то время как другой конец соединяется с кончиком направляющего катетера. При натяжении тягового тросика дистальный конец направляющего катетера изгибается.
[30] На рис. 3-3 показан вариант осуществления механизма выдвижения катетера для картирования и удаления (12) из направляющего катетера (11). Ручка управления (19) входит в зацепление с блоком вращения и фиксации (34) через структурный компонент (33), а блок вращения и фиксации (34) имеет кольцо с канавкой в точке контакта со структурным компонентом (33), обеспечивая отсутствие вращения последнего вместе с блоком вращения и фиксации. При нажатии на ручку управления (19) блок вращения и фиксации (34) и катетер для картирования и удаления (12), закрепленный на нем, двигаются вперед и назад через структурный компонент (33), чтобы катетер для картирования и удаления (12) мог выдвигаться или втягиваться в направляющий катетер при перемещении ручки управления (19) вперед и назад.
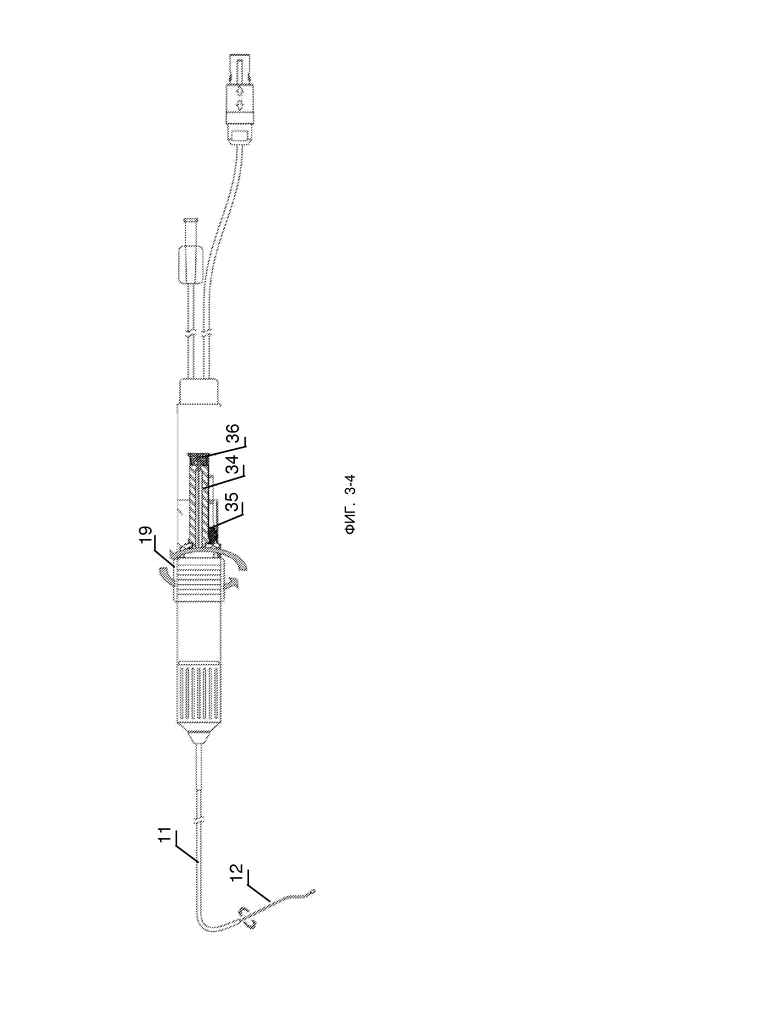
[31] На рис. 3-4 показан вариант осуществления механизма для вращения катетера для картирования и удаления (12) вокруг центральной оси открытого конца направляющего катетера (11). Ручка управления (19) входит в зацепление с блоком вращения и фиксации (34) через комплект шестерен (35). Внешняя поверхность блока (34) изготовлена с зубцами так, чтобы передавать движение от комплекта шестерен (35). По мере того как фиксирующий блок (36) закрепляет катетер для картирования и удаления (12) на блоке вращения и фиксации (34) путем его прижима к ближнему концу катетера (трубка из нержавеющей стали) под действием винта, вращение ручки управления (19) передает движение комплекту шестерен (35), который затем вращает блок вращения и фиксации (34) так, чтобы катетер для картирования и удаления (12) вращался вокруг центральной оси открытого конца направляющего катетера (11).
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[32] Настоящее изобретение будет более понятным со ссылками на следующие описания экспериментов, но специалисты в данной области понимают, что конкретные примеры нужны исключительно для наглядности и не должны ограничивать объем изобретения, который определен нижеследующей формулой.
[33] В одном из вариантов осуществления, настоящее изобретение предусматривает катетерную систему для картирования и удаления почечных нервов, расположенных в почечной артерии, которая включает направляющий катетер с двумя полостями, в которых регулируется изгиб дистального конца; катетер для картирования и удаления, находящийся в направляющем катетере, причем катетер для картирования и удаления регулируется и имеет дистальный конец с заданной формой; рукоять, которая содержит управляющие компоненты; сосуд жидкостного обмена, находящийся на конце рукояти и соединенный с направляющим катетером; разъем на конце рукояти для соединения с наружными приборами; а также тяговые тросики, соединяющие дистальный конец направляющего катетера с управляющими компонентами.
[34] В одном варианте осуществления, настоящее изобретение предусматривает одинарный катетер, выполняющий множество функций и объединяющий катетер для картирования и удаления и направляющий катетер в одно устройство; его электрод может подавать энергию для стимуляции электрическим током или удаления подлежащих нервов в почечной артерии, чтобы достичь цели картирования либо удаления нервов. В еще одном варианте, настоящее изобретение дает пользователям возможность вводить контрастные вещества, отбирать пробы крови или вводить лекарственное средство через направляющий катетер. В другом варианте осуществления, дистальные концы устройства по настоящему изобретению регулируются для адаптации по структуре почечной артерии или соответствующему положению между брюшной аортой и почечной артерий, чтобы пользователи имели больший контроль над катетером. Это упрощает введение катетера в почечную артерию и точный выбор положения, в котором электрод на кончике катетера соприкасается со стенкой почечной артерии. Дистальный конец катетера также имеет структуру, которая позволяет ему фиксироваться в выбранном положении для гарантии того, что кончик катетера не сместится во время операции.
[35] В другом варианте, управляющие компоненты, содержащиеся в рукояти, включают одну или несколько ручек управления для контроля катетера для картирования и удаления и дистальный конец направляющего катетера. Ручка управления соединена с рукоятью, катетером для картирования и удаления и тяговыми тросиками, причем такое соединение с рукоятью является неподвижным либо обеспечивает вращение или скольжение. Соединение с катетером для картирования и удаления может быть неподвижным или коаксиальным неподвижным.
[36] В следующем варианте, один или несколько тяговых тросиков в направляющем катетере соединяют кончик этого катетера с одним или несколькими управляющими компонентами в рукояти, чтобы дистальный конец катетера изгибался посредством манипулирования одним или несколькими управляющими компонентами. В еще одном варианте, управляющие компоненты включают один или несколько ползунов и ручек управления, причем рука управления приводит в движение один или несколько ползунов благодаря механизму винтовой резьбы. Вращение ручки управления линейно двигает ползун по направляющей и, так как один конец тягового тросика крепится к ползуну, а другой конец соединяется с кончиком направляющего катетера, при натяжении тягового тросика дистальный конец направляющего катетера изгибается.
[37] В одном из вариантов осуществления изобретения, катетер для картирования и удаления крепится к одному или нескольким управляющим компонентам внутри рукояти, чтобы его можно было выдвинуть из направляющего катетера с помощью одного или нескольких управляющих компонентов. Длину выдвижения также можно регулировать. В другом варианте осуществления изобретения, управляющие компоненты включают ручку управления, структурную деталь и блок вращения и фиксации. Ручка управления входит в зацепление с блоком вращения и фиксации через структурную деталь, а блок вращения и фиксации имеет кольцо с канавкой в точке контакта со структурной деталью, обеспечивая отсутствие вращения последней вместе с блоком вращения и фиксации. В еще одном варианте осуществления изобретения, при нажатии на ручку управления, блок вращения и фиксации движется вперед и назад через структурную деталь; так как электрод на кончике катетера крепится на блоке вращения и фиксации, он движется вместе с ним. В одном из вариантов осуществления изобретения, выверенные отметки на ручке управления позволяют точно контролировать длину катетера для картирования и удаления, выдвинутого из направляющего катетера или втянутого в него, например, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 75, 80 мм и т.д. Точный контроль длины выдвижения из направляющего катетера может обеспечить минимальное расстояние между точками удаления, например, 5 мм. В еще одном варианте осуществления изобретения, катетер для картирования и удаления, выдвигающийся из направляющего катетера, может втягиваться в направляющий катетер с помощью той же или других ручек управления.
[38] В одном варианте осуществления изобретения, катетер для картирования и удаления прикреплен к одному или нескольким управляющим компонентам на рукояти, чтобы его можно было вращать, манипулируя ими. В другом варианте осуществления, управляющие компоненты включают в себя ручку управления, шестерни или комплект шестерен, блок вращения и фиксации и фиксирующий блок. В еще одном варианте, ручка управления входит в зацепление с блоком вращения и фиксации через шестерни или комплект шестерен, а внешняя поверхность блока вращения и фиксации изготовлена с зубцами так, чтобы передавать движение от шестерен или их комплекта. В одном из вариантов осуществления изобретения, электрод на кончике катетера закреплен на блоке вращения и фиксации так, чтобы этот электрод двигался вместе с ним. В другом варианте, электрод на кончике катетера закреплен путем прижима фиксирующего блока к ближнему концу катетера (трубка из нержавеющей стали) под действием винта. В следующем варианте, вращение ручки управления передает движение шестерням или комплекту шестерен, который затем вращает блок вращения и фиксации и, в свою очередь, обеспечивает вращение электрода на кончике катетера. В другом варианте, выверенные отметки на ручке управления на рукояти обеспечивают точное управление количеством оборотов катетера для картирования и удаления, а каждая отметка представляет оборот под заданным углом до 360°, чтобы при стимуляции электрическим током отсутствовали мертвые зоны. К примеру, каждая отметка представляет собой оборот катетера для картирования и удаления на 15°.
В одном из вариантов осуществления настоящего изобретения, движение ручек управления происходит по направляющим (направляющей) в точке контакта с рукоятью. В другом варианте, длина направляющей ограничивает диапазон движения ручки управления вперед или назад, которая, в свою очередь, предотвращает избыточное натяжение или разрыв тягового тросика. В еще одном варианте осуществления, для ручки управления, которая вращается вокруг рукояти, предусмотрен небольшой выступ на рукояти, которые зацепляется в небольшим выступом на ручке. Ручка управления свободно вращается по направляющей на участке, где два выступа не встречаются, однако чрезмерное вращение ручки управления блокируется при зацеплении этих двух выступов, тем самым предотвращая избыточное натяжение или разрыв тягового тросика.
[40] В одном варианте осуществления изобретения, катетер для картирования и удаления вращается как минимум в двух режимах. Катетер для картирования и удаления вращается после выдвижения из направляющего катетера. В другом варианте, катетер для картирования и удаления вращается после полного втягивания в направляющий катетер.
[41] В одном из вариантов осуществления, изгиб регулируемых дистальных концов катетера для картирования и удаления и направляющего катетера можно изменить и настроить под структуру почечной артерии или соответствующие точки брюшной аорты и почечной артерии, чтобы катетер можно было проще вводить и управлять им внутри почечной артерии.
[42] В другом варианте осуществления изобретения, изгиб дистального конца направляющего катетера можно контролировать с помощью ручки управления через тяговый тросик, чтобы дистальный конец направляющего катетера можно было вводить в почечную артерию под соответствующим углом.
[43] В одном варианте осуществления настоящего изобретения, дистальный конец катетера для картирования и удаления может образовывать определенный изгиб. В другом варианте, изгиб гарантирует, что дистальный конец катетера может выступать в качестве опоры и крепиться в фиксированном положении в почечной артерии для установления хорошего контакта между дистальным концом катетера и внутренней стенкой артерии и точного соответствия точки удаления картированной точке. В еще одном варианте осуществления изобретения, хороший контакт между электродом и внутренней стенкой артерии гарантирует, что электрическая энергия при стимуляции электрическим током может эффективно подаваться на стенку артерии. В следующем варианте, энергия при радиочастотном удалении может эффективно подаваться на стенку артерии для удаления нерва.
[44] В одном из вариантов осуществления изобретения, изгиб дистального конца катетера для картирования и удаления поддерживается с помощью никель-титанового сплава с памятью формы с заданной формой так, чтобы дистальный конец мог сохранять заданный изгиб после установки на катетер. Изгиб достигается с помощью тяговых тросиков, когда один конец тягового тросика закреплен на дистальном конце катетера для картирования и удаления, а другой - к пружине из нержавеющей стали или никель- титанового сплава внутри рукояти. Когда катетер для картирования и удаления втягивается в направляющий катетер, дистальный конец закрепляется на месте и тянет тяговый тросик, сжимая пружину. Когда дистальный конец катетера для картирования и удаления выдвигается из направляющего катетера, он открепляется, и пружина естественным образом разжимается и тянет тяговый тросик, изгибая дистальный конец катетера.
[45] В другом варианте осуществления изобретения, на кончике катетера для картирования и удаления находится один или несколько электродов. Электроды могут подавать электрическую энергию для картирования нерва. В еще одном варианте, эти электроды могут подавать радиочастотную энергию для удаления почечного нерва. В других вариантах, электроды также могут применять другие типы энергии, такие как лазерная энергия, высокоинтенсивный фокусированный ультразвук, или применяться в других способах удаления, таких как криоабляция, чтобы подавать энергию на стенку почечной артерии и удалить почечный симпатический или любой другой нерв.
[46] В одном варианте, кончик катетера для картирования и удаления оснащен одним или несколькими датчиками. Этот датчик представляет собой датчик температуры, чтобы пользователи могли измерять температуру в артерии или на стенке артерии. В еще одном варианте, этот датчик является датчиком сопротивления, чтобы пользователи могли измерять сопротивление между электродом и стенкой артерии и устанавливать хороший контакт между кончиком катетера и стенкой артерии.
[47] В еще одном варианте, катетер по настоящему изобретению дополнительно оснащен механизмом герметизации для контроля жидкости, входящей или выходящей из кончика направляющего катетера. Механизм герметизации формируется гладкой поверхностью электрода на кончике катетера для картирования и удаления, плотно прилегающей к гладкому краю открытого конца направляющего катетера. Когда катетер для картирования и удаления втягивается в направляющий катетер, тесный контакт между его электродом и краем открытого конца направляющего катетера предотвращает вход или выход жидкости из открытого конца направляющего катетера. Когда механизм герметизации открыт, жидкость входит или выходит из направляющего катетера по желанию пользователя. Данная жидкость включает контрастные вещества, кровь или лекарственные средства. Контроль входа или выхода жидкости из направляющего катетера нужен для введения контрастного вещества для ангиографии, отбора проб крови из почечной артерии или аорты, либо введения лекарственных средств в почечную или магистральную артерию.
[48] В одном варианте, конец рукояти оснащен сосудом жидкостного обмена, соединенным с направляющим катетером, где жидкость может вводиться в дистальный конец направляющего катетера через сосуд жидкостного обмена. Дистальный конец направляющего катетера дополнительно оснащен одним или несколькими боковыми отверстиями для входа или выхода жидкости через дистальный конец направляющего катетера.
В следующем варианте осуществления, конец рукояти оснащен разъемом для соединения с наружными приборами. Наружный прибор представлен контроллером для картирования и удаления, причем он оснащен электродом катетера для картирования и удаления с энергией для стимуляции или удаления нервов.
[50] В еще одном варианте, выбор материалов для направляющего катетера зависит от твердости материала, выбранного в зависимости от фактической необходимости при размещении направляющего катетера в почечной артерии. Данный направляющий катетер изготовлен из одного или нескольких материалов разной твердости, которые включают полиэфирблокамид, полиимид или термопластичный полиуретан. Материалы находятся в разных частях направляющего катетера в зависимости от их твердости: материал на дистальном конце самый мягкий, материал в средней части направляющего катетера обладает средней твердостью, а материал ближнего конца самый твердый. Твердость материалов составляет от 90A до 80D по шкале твердости Шора. Разные материалы могут непосредственно сплавляться встык. Направляющий катетер имеет как минимум одну большую и одну малую полость. Большая полость вмещает катетер для картирования и удаления. Наружный диаметр направляющего катетера составляет 1,0-5,0 мм, в то время как внутренний - 0,5-4,0 мм. Малая полость вмещает тяговый тросик.
[51] В другом варианте осуществления изобретения, катетер для картирования и удаления включает дистальный и ближний концы, при этом они выполнены из трубок из тканого армированного полимера, который включает полиэфирблокамид, полиимид или термопластичный полиуретан. Ближний конец выполнен из металлических трубок, к примеру, из нержавеющей стали или никель-титанового сплава. Наружный диаметр катетера для картирования и удаления составляет 0,1-3,0 мм.
[52] В одном из вариантов осуществления изобретения, электрод на кончике катетера для картирования и удаления изготовлен из металлов, которые включают платину, платиново-иридиевый сплав, золото или серебро. По своей форме электрод круглый, овальный, спиралевидный, сферический, цилиндрический или кольцеобразный. Размер электрода подходит для применения внутри почечной артерии, а его диаметр или длина составляет 0,1~4 мм.
[53] В другом варианте осуществления изобретения, рукоять изготовлена из полимеров, включая полиоксиметилен, сополимер акрилонитрила, бутадиена и стирола, поликарбонат, полиамид или полиметилметакрилат.
[54] В еще одном варианте осуществления изобретения, тяговый тросик изготовлен из таких материалов, как нержавеющая сталь или никель-титановый сплав.
[55] В одном из вариантов, катетеры по настоящему изобретению могут находиться в разных режимах во время картирования или удаления в зависимости от фактической необходимости при операции. Катетер для картирования и удаления полностью задвигается в направляющий катетер, когда его кончик помещается в полости почечной артерии для картирования и удаления.
[56] В следующем варианте, устройство по настоящему изобретению используется вместе со всеми типами совместимого медицинского оборудования, которое включает проволочный проводник катетера, тяговый проволочный проводник, интродьюсер, расширитель или хирургические устройства для сердечно-сосудистых заболеваний и вазоренальной гипертензии. Проволочный проводник катетера может помещаться в кровеносный сосуд пациент заранее, чтобы направить дистальный конец направляющего катетера в нужное положение. В еще одном варианте, тяговый проволочный проводник способствует размещению катетера в нужном положении.
[57] Настоящее изобретение дополнительно предусматривает способ применения данного катетера для картирования положения почечных нервов в почечной артерии и определения в ней точек удаления, чтобы оптимизировать процедуру удаления почечного нерва. В одном из вариантов, способ включает следующие этапы: введение дистального конца катетера, включающего катетер для картирования и удаления и направляющий катетер, в полость почечной артерии; манипулирование ручками управления на рукояти для перемещения дистального конца катетера для картирования и управления или направляющего катетера, чтобы установить хороший контакт между электродом катетера для картирования и удаления и стенкой почечной артерии; стимуляция электрическим током почечной артерии через электрод и мониторинг одного или нескольких физиологических параметров на наличие любых изменений; анализ данных картирования почечного нерва, включая физиологические изменения, для предоставления информации о расположении почечного нерва и эффективного координирования клинических врачей в процедуре почечной денервации. Физиологические параметры включают кровяное давление, частоту сердечных сокращений, вариабельность ритма сердца, активность симпатических нервов мышц или уровень избытка почечного норэпинефрина. Когда стимуляция электрическим током в данной точке вызывает изменения в физиологических параметрах, там находится симпатический нерв, и стимулируемая точка подходит для удаления. Когда стимуляция электрическим током в этой точке вызывает отрицательные изменения физиологических параметров, там находится парасимпатический нерв, и удаление не рекомендуется выполнять в стимулируемой точке.
[58] В одном варианте осуществления изобретения, анализ данных картирования почечного нерва, включая изменения физиологических параметров, предоставляет информацию о расположении почечного нерва, что дает возможность эффективно координировать действия клинических врачей в процедуре почечной денервации.
Настоящее изобретение дополнительно предусматривает способ картирования и удаления почечных нервов с помощью вышеописанных устройств и включает следующие этапы:
(1) Введение дистального конца устройства в брюшную аорту через прокол на бедренной артерии;
(2) Изгиб дистального конца устройства для адаптации под структуру почечной артерии и соответствующее положение между почечной артерией и брюшной аортой для более легкого доступа к первой;
(3) Выдвижение катетера для картирования и удаления из направляющего катетера и установление хорошего контакта между электродом на его кончике со стенкой почечной артерии;
(4) Подача электрической энергии в точку контакта с электродом для стимуляции любых подлежащих нервов и одновременный мониторинг физиологической реакции в виде частоты сердечных сокращений, кровяного давления и/или ЭКГ. Стимулируемая точка считается подходящей для удаления подлежащего симпатического нерва, если кровяное давление, частота сердечных сокращений и/или вариабельность ритма сердца по ЭКГ увеличились. Удаление не следует выполнять в стимулируемой точке с подлежащим парасимпатическим нервом, если кровяное давление, частота сердечных сокращений и/или вариабельность ритма сердца по ЭКГ снизились, либо отдельно уменьшается частота сердечных сокращений;
(5) Подача радиочастотной энергии в определенную точку удаления через электрод на кончике катетера для картирования и удаления нерва, в то время как кончик катетера для картирования и удаления остается неподвижным;
(6) Контроль физиологической реакции в виде частоты сердечных сокращений, кровяного давления и/или ЭКГ во время удаления; кровяное давление и частота сердечных сокращений поднимутся, если радиочастотная энергия успешно подействует на симпатический нерв;
(7) Повторная подача электрической энергии в точку контакта с электродом для стимуляции подлежащего нерва после удаления; подлежащий нерв успешно удален, если кровяное давление и частота сердечных сокращений остаются неизменными;
(8) Вращение катетера для картирования и удаления, чтобы переместить электрод на его кончике в другое положение на стенке почечной артерии; и
(9) При необходимости, повтор этапов (1)-(8) в новом положении контакта.
[60] Дополнительные сведения о процедуре картирования нерва раскрыты в опубликованных международных заявках: PCT/IB2012/054303, поданной 24 августа 2012 года, и PCT/IB2012/054310, поданной 24 августа 2012 года.
ПРИМЕР 1
[61] На рис. с 1-1 по 1-4 показан один из вариантов осуществления настоящего изобретения. Как показано на рис. 1 -1, катетер включает регулируемый направляющий катетер (11) с полостями, регулируемый катетер для картирования и удаления (12) с дистальным концом заданной формы, находящийся в направляющем катетере, рукоять (13), включающую в себя управляющие компоненты, сосуд жидкостного обмена (14), соединенный с направляющим катетером на конце рукояти, разъем (15) на конце рукояти для соединения с катетером для картирования и удаления, а также тяговые тросики, соединяющие кончик направляющего катетера с управляющими компонентами.
[62] В одном варианте осуществления изобретения, рукоять (13) и управляющие компоненты, содержащиеся в ней, изготовлены из полиоксиметилена, сополимера акрилонитрила, бутадиена и стирола или полиметилметакрилата.
[63] В другом варианте осуществления изобретения, направляющий катетер (11) имеет наружный диаметр 2,66 мм, имеется небольшая полость диаметром 0,4 мм для пропуска тягового тросика и большая полость диаметром 1,57 мм для пропуска катетера для картирования и удаления. Направляющий катетер (11) изготовлен из 3 видов термопластичного полиуретана, каждый из которых обладает разной твердостью; материал на дистальном конце направляющего катетера самый мягкий, материал в средней части направляющего катетера обладает средней твердостью, а материал ближнего конца самый твердый. Твердость этих трех частей соответственно составляет от 90А до 40D, от 40D до 70D и от 70D до 80D по шкале твердости Шора. Эти три типа материалов сплавляются встык.
[64] В одном из вариантов осуществления изобретения, катетер для картирования и удаления (12) имеет наружный диаметр 1,1 мм; его дистальный конец изготавливается из тканого полиимида, а его ближний конец - из нержавеющей стали.
[65] На рис. 2-1 показан дистальный конец катетера для картирования и удаления в том же варианте осуществления, что и на рис. 1-1. Изгиб дистального конца катетера для картирования и удаления удерживается тяговыми тросиками (24), где один конец тягового тросика (24) крепится к дистальному концу катетера для картирования и удаления (12), а другой - к нержавеющей стали или никель-титановому сплаву в рукояти (13). Когда катетер для картирования и удаления втягивается в направляющий катетер, дистальный конец закрепляется на месте и натягивает тяговый тросик (24), в то время как пружина сжимается. Когда дистальный конец катетера для картирования и удаления (12) выдвигается из направляющего катетера (11), он открепляется, а сжатая пружина естественным образом разжимается и тянет тяговый тросик (24), изгибающий дистальный конец катетера. В одном варианте осуществления изобретения, катетер для картирования и удаления оснащен электродом (22) и датчиками температуры и сопротивления (23).
[66] В еще одном варианте осуществления изобретения, электрод (22) представляет собой круглый электрод, изготовленный из платиново-иридиевого сплава с диаметром 2,33 мм. Электрод может подавать как электрическую, так и радиочастотную энергию.
[67] На рис. 2-2 показан механизм герметизации на дистальном конце того же варианта осуществления изобретения, что и на рис. 1-1. В одном варианте осуществления изобретения, механизм герметизации между кончиком катетера для картирования и удаления (12) и направляющим катетером (11) формируется гладкой поверхностью круглого электрода (22), плотно прилегающей к гладкому краю открытого конца направляющего катетера (11). Тяговый тросик (24) катетера для картирования и удаления и тяговый тросик (26) направляющего катетера изготовлены из нержавеющей стали или никель-титанового сплава.
В следующем варианте осуществления изобретения, управляющие компоненты в рукояти (13) включают три ручки управления (16, 17, 18), ползун (31), структурный компонент (33), блок вращения и фиксации (34), шестерни или комплект шестерен (35) и фиксирующий блок (36).
[69] В одном варианте, первая ручка управления (16) приводит в движение ползун (31) с механизмом винтовой резьбы; вращение первой ручки управления (16) линейно двигает ползун (31) по направляющей (32). Один конец тягового тросика крепится к ползуну (31), а другой конец соединяется с кончиком направляющего катетера (12). При натяжении тягового тросика дистальный конец (11) направляющего катетера изгибается.
[70] В другом варианте осуществления изобретения, вторая ручка управления (17) входит в зацепление с блоком вращения и фиксации (34) через структурный компонент (33); блок вращения и фиксации (34) имеет кольцо с канавкой в точке контакта со структурным компонентом (33), обеспечивая отсутствие вращения последнего вместе с блоком вращения и фиксации. При нажатии второй ручки управления (17), блок вращения и фиксации (34) движется вперед и назад через структурный компонент (33). Электрод (22) на кончике катетера крепится относительно блока вращения и фиксации (34) так, чтобы двигаться вместе с ним. В результате, при движении второй ручки управления (17) вперед и назад, катетер для картирования и удаления (12) выдвигается из направляющего катетера (11) или втягивается в него. В одном из вариантов осуществления изобретения, выверенные отметки на второй ручке (17) позволяют точно контролировать длину катетера для картирования и удаления, выдвинутого из направляющего катетера или втянутого в него так, чтобы расстояние между точками удаления составляло, к примеру, не менее 5 мм.
[71] В одном из вариантов осуществления изобретения, третья ручка управления (18) входит в зацепление с блоком вращения и фиксации (34) через комплект шестерен (35), внешняя поверхность блока (34) изготовлена с зубцами так, чтобы передавать движение от шестерен или их комплекта (35). Катетер для картирования и удаления (12) крепится относительно блока вращения и фиксации (34) так, чтобы двигаться вместе с ним. Под действием винта, фиксирующий блок (36) закрепляет катетер для картирования и удаления (12) путем прижима к ближнему концу катетера (например, к трубке из нержавеющей стали). Вращение третьей ручки управления (18) передает это движение на шестерни или их комплект (35), который, в свою очередь, вращает блок вращения и фиксации (34) так, чтобы катетер для картирования и удаления (12) вращался вокруг центральной оси открытого конца направляющего катетера (11). В одном из вариантов осуществления изобретения, выверенные отметки на третьей ручке управления (18) обеспечивают точное управление вращением катетера для картирования и удаления, к примеру, на 15° при каждом повороте.
[72] Катетер для картирования и удаления (12) по одному варианту осуществления изобретения может вращаться в двух режимах. В первом режиме, дистальный конец катетера (12) при вращении выдвигается из направляющего катетера (11), в то время как во втором режиме дистальный конец катетера для картирования и удаления (12) при вращении полностью втягивается в направляющий катетер (11).
ПРИМЕР 2
[73] В настоящем примере, вторая (17) и третья (18) ручки управления являются одной и той же частью (19) (рис. 3-1), т.е. одна и та же ручка управления (19) может контролировать выдвижение, втягивание и вращение катетера для картирования и удаления; однако, блокировочное устройство обеспечивает невозможность вращения при нажатии или вытягивании ручки управления. С другой стороны, при вращении этой ручки управления выдвинуть или втянуть катетер для картирования и удаления невозможно. В одном варианте, движение одной ручки управления вперед и назад выдвигает катетер для картирования и удаления (12) из направляющего катетера (11) или втягивает его внутрь (рис. 3-3); вращение одной и той же ручки управления (19) приводит к вращению катетера для картирования и удаления (12) вокруг центральной оси открытого конца направляющего катетера (11) (рис. 3-4).
[74] На рис. с 3-2 по 3-4 показано внутреннее устройство изобретения из примера 2. Управляющие компоненты в рукояти (13) включают две ручки управления (16, 19), ползун (31), структурный компонент (33), блок вращения и фиксации (34), шестерни или комплект шестерен (35) и фиксирующий блок (36).
[75] В другом варианте осуществления изобретения, первая ручка управления (16) приводит в движение ползун (31) с механизмом винтовой резьбы; вращение первой ручки управления (16) приводит к линейному движению ползуна (31) по направляющей (32). Так как один конец тягового тросика закрепляется на ползуне (31), а второй соединен с кончиком (12) направляющего катетера, при натяжении тягового тросика направляющий катетер (11) изгибается (рис. 3-1).
[76] В следующем варианте, вторая ручка управления (19) входит в зацепление с блоком вращения и фиксации (34) через структурный компонент (33), а сам блок вращения и фиксации (34) имеет кольцо с канавкой на точке контакта со структурным компонентом (33), обеспечивая отсутствие вращения последнего вместе с блоком вращения и фиксации. При нажатии второй ручки управления (19), блок вращения и фиксации (34) движется вперед и назад через структурный компонент (33). Электрод (22) на кончике катетера крепится на блоке вращения и фиксации (34) так, чтобы двигаться вместе с ним. В результате, при движении второй ручки управления (19) вперед и назад, катетер для картирования и удаления (12) выдвигается из направляющего катетера (11) или втягивается в него. Выверенные отметки на второй ручке (19) позволяют точно контролировать длину катетера для картирования и удаления, выдвинутого из направляющего катетера или втянутого в него так, чтобы расстояние между точками удаления составляло, к примеру, не менее 5 мм.
[77] В одном из вариантов осуществления изобретения, вторая ручка управления (19) входит в зацепление с блоком вращения и фиксации (34) через комплект шестерен (35), внешняя поверхность блока (34) изготовлена с зубцами так, чтобы передавать движение от шестерен или их комплекта (35). Катетер для картирования и удаления (12) крепится относительно блока вращения и фиксации (34) так, чтобы двигаться вместе с ним. Под действием винта, фиксирующий блок (36) закрепляет катетер для картирования и удаления (12) путем прижима к ближнему концу катетера (например, к трубке из нержавеющей стали). Вращение второй ручки управления (19) передает это движение на шестерни или комплект шестерен (35), который, в свою очередь, вращает блок вращения и фиксации (34) так, чтобы катетер для картирования и удаления (12) вращался вокруг центральной оси открытого конца направляющего катетера (11). Выверенные отметки на второй ручке управления (19) обеспечивают точное управление вращением катетера для картирования и удаления, к примеру, на 15° при каждом повороте. По всем остальным аспектам данный пример идентичен первому.
ПРИМЕР 3
В данном примере, изгиб дистального конца катетера для картирования и удаления поддерживается с помощью никель-титанового сплава с памятью формы с заданной формой (25) так, чтобы дистальный конец мог сохранять заданный изгиб после установки на катетер. По всем остальным аспектам данный пример идентичен первому.
ПРИМЕР 4
[79] В данном примере, направляющий катетер (11) изготавливается из трех видов термопластичного полиуретана с разной твердостью; дистальный конец самый мягкий, средняя часть обладает средней твердостью, а ближний конец самый твердый. В одном из вариантов осуществления изобретения, твердость этих трех частей соответственно составляет от 90А до 40D, от 40D до 70D и от 70D до 80D по шкале твердости Шора. Эти три типа материалов сплавляются встык. По всем остальным аспектам данный пример идентичен первому.
ПРИМЕР 5
[80] В данном примере, датчик на головке катетера для картирования и удаления (12) является датчиком сопротивления. По всем остальным аспектам данный пример идентичен первому.
ПРИМЕР 6
[81] В данном примере, на кончике катетера для картирования и удаления (12) имеются датчик сопротивления и датчик температуры (23). По всем остальным аспектам данный пример идентичен первому.
ПРИМЕР 7
[82] В варианте осуществления настоящего изобретения, где применяются любые из перечисленных выше устройств, чтобы установить электрод на головке катетера для картирования и удаления с электрической энергией, необходимой для стимуляции нервов, и радиочастотной энергией для их удаления, разъем (15) соединяется с внешним контроллером картирования и удаления.
[83] В одном из вариантов осуществления изобретения, способ картирования и удаления почечных нервов с помощью любого из вышеописанных устройств включает:
(1) Введение дистального конца катетера в брюшную аорту через прокол в бедренной артерии;
(2) Изгиб дистального конца устройства путем вращения первой ручки управления (16) для адаптации под структуру почечной артерии и соответствующее положение между почечной артерией и аортой для более легкого доступа к первой;
(3) Выдвижение катетера для картирования и удаления (12) из направляющего катетера (11) путем нажатия второй ручки управления (17 или 19), а также установление хорошего контакта между электродом (22) на кончике катетера для картирования и удаления (12) и стенкой почечной артерии;
(4) Подача электрической энергии в точку контакта с электродом (22) для стимуляции подлежащих нервов и одновременный контроль физиологической реакции в виде частоты сердечных сокращений, кровяного давления и/или ЭКГ. Стимулируемая точка считается подходящей для удаления подлежащего симпатического нерва, если кровяное давление, частота сердечных сокращений и/или вариабельность ритма сердца по ЭКГ увеличились. Удаление не выполняется в стимулируемой точке с подлежащим парасимпатическим нервом, если кровяное давление, частота сердечных сокращений и/или вариабельность ритма сердца по ЭКГ снизились, либо отдельно уменьшается частота сердечных сокращений;
(5) Подача радиочастотной энергии в определенную точку удаления через электрод (22) на кончике катетера для картирования и удаления нерва, в то время как кончик катетера для картирования и удаления (12) остается неподвижным;
(6) Контроль физиологической реакции в виде частоты сердечных сокращений, кровяного давления и/или ЭКГ во время удаления; кровяное давление и частота сердечных сокращений поднимутся, если радиочастотная энергия успешно подействует на симпатический нерв;
(7) Повторная подача электрической энергии в точку контакта с электродом (22) для стимуляции подлежащего нерва после удаления. Подлежащий нерв успешно удален, если кровяное давление и частота сердечных сокращений остаются неизменными;
(8) Вращение третьей (18) или второй (19) ручки управления для поворота катетера для картирования и удаления (12), чтобы перевести электрод (22) на его кончике в другое положение на стенке почечной артерии, и, при необходимости, повторение этапов (1)-(8) в новом положении контакта.
ИСТОЧНИКИ
1. Брандт М.К., Махфуд Ф., Реда С. и соавт. Почечная симпатическая денервация сокращает гипертрофию левого желудочка и улучшает сердечную функцию у пациентов, страдающих устойчиво высоким кровяным давлением. Журнал Американского колледжа кардиологов. 2012, 59: 901-909.
2. Бринкман Дж., Хойсер К., Шмидт Б.М. и соавт. Удаление почечного нерва с помощью катетера и центрально генерируемая симпатическая активность у сложно контролируемых пациентов-гипертоников: серия проспективных случаев болезни. Журнал Hypertension. 2012; 60: 1485-1490.
3. Тинуси М., Идзуми Д., Идзима К. и соавт. Кровяное давление и автономные реакции на стимуляцию электрическим током почечных нервов, расположенных в почечной артерии, до и после ее удаления. Журнал Hypertension. 2013 (61): 450-456.
4. Д'Агроза Л.С. Сердечные аритмии симпатического происхождения у собак. Американский журнал физиологии. Сердце и физиология кровообращения. 1977, 233 (5): Н535-Н540.
5. Дасгупта И., Уоткин Р., Фридман Дж. и соавт. Почечная симпатическая денервация при устойчивой к лечению гипертонии у пациентов, страдающих тяжелой ХБП: первый доклад в журнале Journal of Human Hypertension 2012, 26 (10): 639.
6. Эслер М.Д., Крум Г., Соботка П.А. и соавт. Почечная симпатическая денервация у пациентов, страдающих устойчивой к лечению гипертонией (Simplicity HTN-2): контролируемое исследование методом случайной выборки. Журнал Lancet. 2010, 376: 1903~1909.
7. Эслер М. Автономная нервная система и сердечные аритмии. Клинические автономные исследования, 1992, 2 (2): 133-135.
8. Геринг Д., Махфуд Ф., Уолтон А.С. и соавт. Почечная денервация при средней и тяжелой ХБП. Журнал Американского общества нефрологов. 2012, 23 (7): 1250 1257.
9. Геринг Д., Уолтон А.С., Крум Г. и соавт. Удаление почечного симпатического нерва при средней и тяжелой хронической почечной недостаточности: краткосрочное пробное исследование по безопасности и эффективности. Журнал Hypertension. 2012, 60 (2): 502.
10. Крум Г., Шляйх М., Уитборн Р. и соавт. Почечная денервация с помощью катетера при устойчивой к лечению гипертонии: многоцентровое и контрольно-проверочное клиническое когортное исследование. Журнал Lancet. 2009, 373: 1275~1281.
11. Махфуд Ф., Шляйх М., Киндерман И. и соавт. Влияние почечной симпатической денервации на метаболизм глюкозы у пациентов, страдающих устойчивой гипертонией: пробное исследование. Журнал Circulation. 2011, 123: 1940~1946.
12. Садовский Дж.; Бартус К.; Капелак Б. и соавт. Почечная денервация с помощью катетера при устойчивой гипертонии: устойчивость уменьшения кровяного давления в течение 24 месяцев. Журнал Hypertension. 2011, 57: 911~917.
13. Шляйх М.П., Сократус Ф., Хеннебри С. и соавт. Симпатическая активация при хронической почечной недостаточности. Журнал Американского общества нефрологов. 2009, 20 (5): 933-939.
14. Соботка П.А., Крум Г., Бом М. и соавт. Роль почечной денервации в лечении сердечной недостаточности. Журнал Current Cardiology Reports. 2012, 14 (3): 285 292.
15. Витковский А., Прейбиш А., Флорчак Е., и соавт. Влияние почечной симпатической денервации на кровяное давление, лечение апноэ во время сна и гликемический контроль у пациентов, страдающих устойчивой гипертонией и апноэ во время сна. Журнал Hypertension. 2011, 58: 559~565.




Изобретение относится к медицинской технике. Устройство для картирования и удаления почечных нервов, расположенных в почечной артерии, содержит направляющий катетер, катетер для картирования и удаления, рукоять и разъем. Направляющий катетер имеет полости и дистальный конец с регулируемым изгибом. Катетер для картирования и удаления находится в одной из полостей направляющего катетера и имеет дистальный конец, включающий электроды и датчики. В качестве электродов служат электроды для подачи радиочастотной энергии. Дистальный конец катетера для картирования и удаления изогнут и выдвигается из направляющего катетера или задвигается в него и вращается по центральной оси открытого конца направляющего катетера. Изгиб дистального конца катетера для картирования и удаления обеспечивается тяговым тросиком, один конец которого крепится к дистальному концу катетера для картирования и удаления, а другой - к пружине внутри рукояти. Когда дистальный конец катетера для картирования и удаления втягивается в направляющий катетер, он закрепляется на месте и тянет тяговый тросик, сжимая пружину. Когда дистальный конец катетера для картирования и удаления выдвигается из направляющего катетера, его дистальный конец открепляется, пружина естественным образом разжимается и тянет тяговый тросик, изгибая дистальный конец катетера. Также используют никель-титановый сплав с памятью формы с заданной формой так, чтобы дистальный конец мог сохранять заданный изгиб после установки на катетер. Рукоять соединяет направляющий катетер и катетер для картирования и удаления и включает управляющие компоненты, которые предназначены для контроля движения направляющего катетера и катетера для картирования и удаления. Разъем предназначен для подачи энергии на электрод. Достигается повышение точности, эффективности и безопасности операции по удалению почечного нерва. 8 з.п. ф-лы, 3 ил.
1. Устройство для картирования и удаления почечных нервов, расположенных в почечной артерии, включающее направляющий катетер, катетер для картирования и удаления, рукоять и разъем, отличающееся тем, что:
направляющий катетер имеет как минимум одну полость и дистальный конец с регулируемым изгибом;
катетер для картирования и удаления находится в одной из полостей направляющего катетера и имеет дистальный конец, включающий один или несколько электродов, а также один или несколько датчиков, при этом в качестве электродов служат электроды для подачи радиочастотной энергии, причем дистальный конец катетера для картирования и удаления изогнут и выполнен с возможностью выдвижения из направляющего катетера или задвижки в него и вращения по центральной оси открытого конца направляющего катетера, при этом изгиб дистального конца катетера для картирования и удаления обеспечивается: тяговым тросиком, один конец которого крепится к дистальному концу катетера для картирования и удаления, а другой - к пружине внутри рукояти, причем, когда дистальный конец катетера для картирования и удаления втягивается в направляющий катетер, он закрепляется на месте и тянет тяговый тросик, сжимая пружину; когда дистальный конец катетера для картирования и удаления выдвигается из направляющего катетера, его дистальный конец открепляется, и пружина естественным образом разжимается и тянет тяговый тросик, изгибая дистальный конец катетера; или
путем использования никель-титанового сплава с памятью формы с заданной формой так, чтобы дистальный конец мог сохранять заданный изгиб после установки на катетер, рукоять соединяет направляющий катетер и катетер для картирования и удаления и включает один или несколько управляющих компонентов, которые предназначены для контроля движения направляющего катетера и катетера для картирования и удаления; и
разъем предназначен для подачи энергии на электрод.
2. Устройство по п. 1, отличающееся тем, что рукоять дополнительно включает сосуд жидкостного обмена, соединенный с направляющим катетером для контроля жидкости, входящей и выходящей из направляющего катетера.
3. Устройство по п. 1, отличающееся тем, дополнительно включает в себя датчики температуры и сопротивления.
4. Устройство по п. 1, отличающееся тем, что между катетером для картирования и удаления и направляющим катетером выполнен механизм герметизации для контроля входящей и выходящей жидкости.
5. Устройство по п. 1, отличающееся тем, что материал на дистальном конце направляющего катетера самый мягкий, материал в средней части направляющего катетера обладает средней твердостью, а материал ближнего конца самый твердый, обладая твердостью материалов от 90А до 80D по шкале твердости Шора.
6. Устройство по п. 1, отличающееся тем, что управляющие компоненты включают ручку управления, отвечающую за изгиб дистального конца катетера.
7. Устройство по любому из пп. 1-5, отличающееся тем, что управляющие компоненты включают ручку управления, отвечающую за выдвижение дистального конца катетера для картирования и удаления из направляющего катетера или втягивание в него.
8. Устройство по любому из пп. 1-5, отличающееся тем, что управляющие компоненты включают ручку управления, отвечающую за вращение дистального конца катетера для картирования и удаления.
9. Устройство по любому из пп. 1-5, отличающееся тем, что управляющие компоненты включают ручку управления, отвечающую за выдвижение дистального конца катетера для картирования и удаления из направляющего катетера или втягивание в него, а также за вращение дистального конца катетера для картирования и удаления.
| US 2002082594 A1, 27.06.2002 | |||
| CN 102551874 A, 11.07.2012 | |||
| WO 2012068471 A1, 24.05.2012 | |||
| CN 102125460 A, 20.07.2011 | |||
| СПОСОБ ЛЕЧЕНИЯ РАКА ЛЕВОЙ ПОЧКИ С ТРОМБОМ, ПРОРАСТАЮЩИМ В КРОВЕНОСНЫЙ СОСУД | 2010 |
|
RU2445013C1 |
| СПОСОБ РАДИОЧАСТОТНОЙ КАТЕТЕРНОЙ АБЛАЦИИ ЛЕВОСТОРОННИХ ДОПОЛНИТЕЛЬНЫХ ПУТЕЙ АТРИОВЕНТРИКУЛЯРНОГО ПРОВЕДЕНИЯ | 2010 |
|
RU2438569C1 |
| US 2011264011 A1, 27.10.2011. | |||

