Изобретение относится к радиотехнике и может быть использовано в системах пассивного радиоконтроля для идентификации, пеленгации и определения местоположения наземных и воздушных объектов по излучениям их ДКМВ передатчиков при использовании одной приемной станции.
Эффективность радиоконтроля ограничивается особенностями распространения ДКМВ, обуславливающими возможность прихода сигнала источника радиоизлучения в точку приема прямой волной, отраженной от ионосферы волной, и суммой этих волн, с одной стороны, а также априорной неопределенностью относительно местоположения источника этих волн в пространстве, с другой. Эти типы волн могут наблюдаться при размещении источника как на земном геоиде, так и в воздушном пространстве.
Известен способ радиоконтроля с использованием радиочастотной голографии [1]. Этот способ основан на цифровой регистрации радиочастотной голограммы радиосигналов, принимаемых антенной решеткой и восстановлении с помощью преобразования Фурье углового спектра многолучевого волнового поля. По максимумам восстановленного углового спектра определяются направления прихода основных и переотраженных лучей. Этот способ не обеспечивает идентификацию наземных и воздушных объектов и определение их координат.
Известен способ радиоконтроля [2], обеспечивающий по излучениям радиопередатчиков разделение объектов на наземные и воздушные, восстановление азимутального пеленга для наземных объектов, а также определение двумерного пеленга и дальности для воздушных, и принятый за прототип. Согласно этому способу:
1. Принимают сигналы источника радиоизлучения решеткой антенн.
2. Преобразуют принятые каждой антенной на заданной частоте сигналы в цифровые сигналы и их регистрацию на заданном временном интервале.
3. Восстанавливают с использованием цифровых сигналов пространственное радиоизображение источника (двумерный комплексный угловой спектр).
4. По максимумам восстановленного радиоизображения определяют азимутальный α и угломестный β пеленги на источник.
5. После сравнения угломестного пеленга β с порогом разделяют источники на наземные и воздушные и определяют наклонную дальность до источника по формуле R=Н/sinβ, где Н - известная высота полета цели.
Из приведенного описания следует, что способ-прототип обеспечивает низкую эффективность радиоконтроля в связи с наличием следующих существенных недостатков:
- высокая вероятность ошибки идентификации за счет пропуска низколетящих целей, угол места прихода прямого сигнала которых в точке приема близок к нулю;
- отсутствие возможности определения местоположения воздушных объектов, высота полета которых не известна, а также наземных объектов;
- наличие ошибок пеленгации, обусловленных сохраняющейся неопределенностью относительно типа приходящей в точку приема волны (прямая волна от воздушной цели или пространственная волна, отразившаяся от ионосферы).
Повышение эффективности радиоконтроля при использовании способа-прототипа может быть обеспечено несколькими известными путями:
1. Усреднением или гистограммной обработкой пеленгов для повышения точности пеленгации [3].
2. Измерением доплеровского смещения частоты для идентификации воздушных объектов [3].
3. Использованием информации о высоте ионосферы совместно с углом места для однопозиционного определения местоположения источника излучения [4].
Первый путь радикально не решает проблему, так как в общем случае многолучевого поля, характерного для сигналов в диапазоне ДКМВ, его эффективность ограничена.
Второй путь требует определенной взаимной ориентации объекта и станции радиоконтроля, а также очень больших интервалов наблюдения.
Третий путь может обеспечить возможность определения местоположения. Однако известные способы, реализующие этот путь, не устраняют аномально большие ошибки измерений. Эти ошибки обусловлены отсутствием учета горизонтальных градиентов электронной концентрации ионосферы, которые приводят к боковым и продольным отклонениям лучевой траектории. Как следствие, отклоняются измеряемые направление прихода излучения и дальность до его источника, однозначно связанные с этой траекторией.
Техническим результатом изобретения является повышение эффективности радиоконтроля наземных и воздушных объектов по излучениям их ДКМВ передатчиков при использовании одной приемной станции.
Повышение эффективности радиоконтроля объектов по излучениям их ДКМВ передатчиков достигается за счет использования дополнительной информации о тонкой структуре электромагнитного поля (число лучей и их параметры) в точке приема и среды распространения (параметры модельных траекторий распространения лучей сигнала в трехмерно неоднородной ионосфере) принимаемых сигналов.
Технический результат достигается тем, что в способе радиоконтроля, включающем прием решеткой из отдельных антенн на заданной частоте сигнала источника радиоизлучения, когерентный перенос принятых каждой антенной сигналов на более низкую частоту, синхронное преобразование этих сигналов в цифровые сигналы, согласно изобретению синхронно регистрируют цифровые сигналы на последовательных во времени интервалах приема, для каждого временного интервала восстанавливают по известным алгоритмам и запоминают число лучей и двумерные пеленги каждого луча принятого сигнала, определяют среднее число лучей, по которому идентифицируют сигнал источника как однолучевой или многолучевой, для сигнала источника, идентифицированного как однолучевой, преобразованием запомненных двумерных пеленгов определяют средний вектор угловой скорости, компоненты которого сравнивают с пороговым значением скорости, при превышении которого источник идентифицируют как воздушный и, используя запомненные угломестные пеленги однолучевого сигнала и известную высоту полета источника сигнала, определяют изменение во времени наклонной дальности до источника сигнала, при не превышении порога скорости источник идентифицируют как наземный, после чего, используя запомненные пеленги однолучевого сигнала, получают его усредненные пеленги, сравнивают с порогом усредненный угломестный пеленг источника, идентифицированного как наземный, при не превышении порога однолучевой сигнал наземного источника идентифицируют как поверхностную волну, описываемую усредненным азимутальным пеленгом, при превышении порога однолучевой сигнал наземного источника идентифицируют как пространственную волну, координаты предполагаемых точек излучения которой определяют, моделируя с привязкой к частоте и временному интервалу приема многоскачковую траекторию обратного распространения модельного сигнала через ионосферу в измеренных направлениях, для сигнала источника, классифицированного как многолучевой, используя запомненные пеленги, получают усредненные пеленги каждого луча и находят максимальную разность между усредненными угломестными пеленгами лучей, сравнивают максимальную разность с порогом, при не превышении порога многолучевой сигнал идентифицируют как пространственную волну, координаты точки излучения которой определяют, моделируя многоскачковые траектории лучей обратного распространения модельного сигнала через ионосферу в измеренных направлениях и выбирая общую точку их прихода на поверхность Земли, при превышении порога многолучевой сигнал идентифицируют как поверхностно-пространственную волну, обусловленную воздушным источником с азимутом, соответствующим азимуту луча с минимальным углом места, а дальность и высоту полета источника находят как точку пересечения односкачковой траектории модельного сигнала с плоскостью, образующей выбранный минимальный угол места с поверхностью Земли. На чертеже приведены:
Фиг.1. Структурная схема устройства, в котором реализуется предложенный способ.
Фиг.2. Модель трехскачковой траектории сигнала.
Фиг.3. Схема определения местоположения наземного источника.
Фиг.4. Схема определения местоположения воздушного источника.
Способ радиоконтроля осуществляется следующим образом:
1. Принимают на заданной частоте сигнал источника радиоизлучения решеткой из отдельных антенн. В состав решетки входят опорная антенна с номером n=0 и N антенн с номерами n=1...N.
2. Когерентно переносят принятые сигналы xn(t) на более низкую частоту, после чего синхронно преобразуют эти сигналы в цифровые сигналы xn(z), где z - номер временного отсчета сигнала.
3. Синхронно регистрируют цифровые сигналы xn(z) на последовательных во времени интервалах приема, то есть преобразуют цифровые сигналы xn(z) в сигналы xn(q, z), где q - номер временного отрезка, 1≤q≤Q, что эквивалентно делению входного сигнала на временные каналы.
4. Для каждого q-го временного интервала восстанавливают по известным алгоритмам преобразования зарегистрированных сигналов xn(q, z) и запоминают число лучей Lq и двумерные (азимут αl,q и угол места βl,q) пеленги каждого луча принятого сигнала, где l=1...L - текущий номер луча.
Число и параметры лучей могут быть восстановлены несколькими известными алгоритмами. Например, алгоритмом, разделяющим лучи по доплеровскому смещению частоты [3]. Кроме данного алгоритма, который требует длительных выборок сигнала, могут использоваться алгоритмы, основанные на восстановлении пространственного радиоизображения источника [1], включая алгоритмы с высоким разрешением [4].
5. Определяют среднее число лучей  , где [...] - целая часть, по которой идентифицируют сигнал источника как однолучевой при
, где [...] - целая часть, по которой идентифицируют сигнал источника как однолучевой при  или многолучевой при
или многолучевой при  .
.
6. Для сигнала источника, идентифицированного как однолучевой  , преобразованием запомненных двумерных пеленгов αq=αL=1,q и βq=βL=1,q, определяют средний вектор угловой скорости
, преобразованием запомненных двумерных пеленгов αq=αL=1,q и βq=βL=1,q, определяют средний вектор угловой скорости 
где tq - момент времени, соответствующий q-му интервалу, компоненты которого сравнивают с пороговым значением скорости.
7. При превышении порогового значения скорости источник идентифицируют как воздушный и, используя запомненные угломестные пеленги βL=1,q однолучевого сигнала, определяют изменение во времени наклонной дальности до источника по формуле Rq=H/sinβL=1,q, где Н - известная высота полета источника сигнала.
8. При не превышении порога скорости источник идентифицируют как наземный, после чего, используя запомненные пеленги αL=1,q и βL=1,q, однолучевого сигнала, получают его усредненные пеленги
9. Сравнивают с порогом усредненный угломестный пеленг  источника, идентифицированного как наземный.
источника, идентифицированного как наземный.
10. При не превышении порога однолучевой сигнал наземного источника идентифицируют как поверхностную волну, описываемую усредненным азимутальным пеленгом  .
.
11. При превышении порога однолучевой сигнал наземного источника идентифицируют как пространственную волну, координаты предполагаемых точек излучения которой определяют, моделируя с привязкой к частоте и временному интервалу приема многоскачковую траекторию обратного распространения модельного (идеального) сигнала через ионосферу в измеренных направлениях и .
Для этого выполняют следующие действия:
а) с привязкой к частоте  и временному интервалу приема (время, месяц, год) формируют модель ионосферы с использованием Международной справочной модели ионосферы IRI-2001 [5]. В результате вычисляют и запоминают пространственное распределение квадрата отношения плазменной частоты электронов fp=fp(ϕ,θ,r) в ионосфере к рабочей частоте принимаемого сигнала, которое необходимо для вычисления показателя преломления изотропной плазмы μ=μ(ϕ,θ,r):
и временному интервалу приема (время, месяц, год) формируют модель ионосферы с использованием Международной справочной модели ионосферы IRI-2001 [5]. В результате вычисляют и запоминают пространственное распределение квадрата отношения плазменной частоты электронов fp=fp(ϕ,θ,r) в ионосфере к рабочей частоте принимаемого сигнала, которое необходимо для вычисления показателя преломления изотропной плазмы μ=μ(ϕ,θ,r):
где (ϕ, θ) - сферические координаты точки на поверхности Земли, причем ϕ отсчитывается от нулевого меридиана, а θ от оси, проходящей из центра Земли через географический север, (ϕ, θ, r) - сферические координаты точки в пространстве.
Для ускорения процедуры вычислений плазменная частота электронов fp в ионосфере прогнозируется на трехмерной пространственной сетке и аппроксимируется кубической сплайн-функцией. Шаг пространственной сетки по координатам на земной поверхности не превышает 500 км, а по вертикальной координате составляет 2,5 км. После процедуры аппроксимации запоминают коэффициенты аппроксимирующей сплайн-функции в узлах пространственной сетки.
б) генерируют идеальные сигналы обратного излучения в измеренных направлениях прихода лучей. Идеальный сигнал описывается единичным волновым вектором  и рабочей частотой . Компоненты единичного вектора определяются по измеренному азимутальному
и рабочей частотой . Компоненты единичного вектора определяются по измеренному азимутальному  и угломестному
и угломестному  пеленгам луча и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0, θ0, r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх) имеют
пеленгам луча и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0, θ0, r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх) имеют 
Переход от локальной системы координат к глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан) для компонент вектора  осуществляется с помощью матрицы преобразования А:
осуществляется с помощью матрицы преобразования А:

где в качестве сферических координат ϕ и θ подставляются координаты пеленгатора ϕ0, θ0.
в) формируют траектории обратного многоскачкового распространения идеальных сигналов каждого луча в ионосфере. Для этого находят начальные значения сферических координат ϕ, θ, r луча, которые полагаются равными координатам точки входа луча в ионосферу ϕ1, θ1, r1, вычисляемым по формулам:

где x1x, x2y, x1z - элементы вектора  декартовых координат точки входа луча в ионосферу:
декартовых координат точки входа луча в ионосферу:

r0 - радиус Земли, h0 - начальная высота ионосферы,  - декартовые координаты точки излучения идеального сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор вычисляется по координатам пеленгатора:
- декартовые координаты точки излучения идеального сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор вычисляется по координатам пеленгатора:

Начальное значение волнового вектора  идеального сигнала на входе в ионосферу определяется по вектору
идеального сигнала на входе в ионосферу определяется по вектору  с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:
с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:

где в качестве сферических координат ϕ и θ подставляются значения ϕ1, θ1.
Для построения лучевой траектории идеального сигнала численно решается задача Коши для системы дифференциальных уравнений:



где kϕ, kθ, kr - значения элементов волнового вектора  идеального сигнала в ионосфере, ϕ, θ, r - координаты луча.
идеального сигнала в ионосфере, ϕ, θ, r - координаты луча.
г) находят вектор волновой нормали на выходе из ионосферы  , сферические ϕ2, θ2, r2 и глобальные декартовые координаты точки выхода из ионосферы
, сферические ϕ2, θ2, r2 и глобальные декартовые координаты точки выхода из ионосферы  луча идеального сигнала. В качестве значений сферических координат ϕ2, θ2, r2 иволнового вектора выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
луча идеального сигнала. В качестве значений сферических координат ϕ2, θ2, r2 иволнового вектора выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
д) находят сферические координаты прихода луча идеального сигнала на поверхность Земли (для первого скачка i=1):

где х3x, х3y, х3z - элементы вектора  декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:
декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:

Матрицу В вычисляют в точке с координатами ϕ2, θ2.
е) сферические координаты точки прихода последующих скачков лучевой траектории определяют повторением этапов б)-д) с использованием обновленных векторов  и
и  :
:
где матрица А и компоненты вектора  после отражения от поверхности Земли определяются с использованием координат
после отражения от поверхности Земли определяются с использованием координат  и
и  полученных на предыдущем скачке.
полученных на предыдущем скачке.
На фиг.2 представленная траектория трехскачкового распространения модельного сигнала из точки размещения ПС с координатами (ϕ0, θ0) внаправлении  Точки пересечения траектории с поверхностью земли с координатами
Точки пересечения траектории с поверхностью земли с координатами 
 соответствуют точкам, из которых мог быть излучен сигнал. Выбор точки, соответствующей однозначной оценке местоположения источника сигнала (см. фиг.2, на которой точка с координатами практически совпадает с точкой размещения радиопередатчика (РПД)), может быть выполнен с привлечением дополнительной априорной информации. Например, информации о не возможности размещения источника в области, занятой водной поверхностью.
соответствуют точкам, из которых мог быть излучен сигнал. Выбор точки, соответствующей однозначной оценке местоположения источника сигнала (см. фиг.2, на которой точка с координатами практически совпадает с точкой размещения радиопередатчика (РПД)), может быть выполнен с привлечением дополнительной априорной информации. Например, информации о не возможности размещения источника в области, занятой водной поверхностью.
Таким образом, в случае прихода в точку приема однолучевого сигнала наземного источника, идентифицируемого как пространственная волна, операции моделирования траектории распространения идеального сигнала позволяют оценить координаты предполагаемых точек излучения принятого сигнала. Информация о предполагаемых точках излучения сигнала существенно повышает информативность радиоконтроля, так как снижает неопределенность относительно местоположения от бесконечного числа точек, описываемых линией пеленга, до двух-трех точек на поверхности Земли.
12. Для сигнала источника, классифицированного как многолучевой, используя запомненные пеленги αl,q и βl,q, получают усредненные пеленги каждого луча  ,
,  и находят максимальную разность между усредненными угломестными пеленгами лучей
и находят максимальную разность между усредненными угломестными пеленгами лучей  , где l≠l', l'=1...L - текущий номер луча.
, где l≠l', l'=1...L - текущий номер луча.
13. Сравнивают максимальную разность Δ с порогом.
14. При не превышении порога многолучевой сигнал идентифицируют как пространственную волну, координаты точки излучения которой определяют, моделируя многоскачковые траектории лучей обратного распространения идеального сигнала через ионосферу в измеренных направлениях  ,
,  и выбирая общую точку их прихода на поверхность Земли.
и выбирая общую точку их прихода на поверхность Земли.
Для выбора общей точки могут быть использованы различные алгоритмы, например алгоритм, основанный на принципе центра масс. При этом для пары точек, идентифицированных как предполагаемые точки излучения, находят точку по принципу центра масс. Если расстояние от центра масс до каждой точки меньше заданного порога, то принимается решение об их совпадении и выборе центра масс в качестве местоположения передатчика. Значение порога выбирается исходя из эксплуатационной точности измерения координат. В результате несколько сопоставляемых точек заменяются одной точкой центра масс.
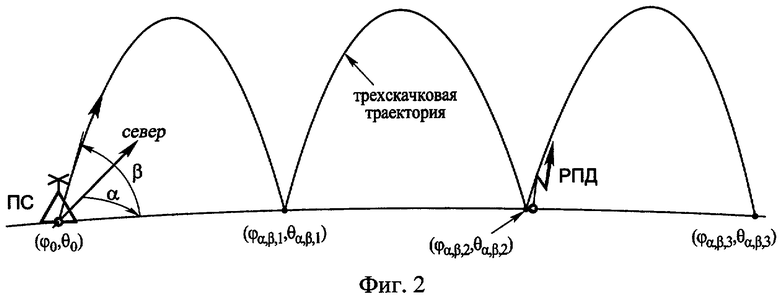
На фиг.3 показаны односкачковая и двухскачковая траектории распространения модельного сигнала с угломестными направлениями β1 и β2 соответственно. С целью упрощения азимутальные направления траекторий α1 и α2 не изображены. Приведены координаты точек прихода на поверхность Земли односкачковой траектории  и двухскачковой траектории
и двухскачковой траектории  и
и  Кроме того, показана общая точка прихода траекторий на поверхность Земли с координатами {ϕРПД, θРПД), которые идентифицированы как координаты передатчика (РПД). При этом использован упомянутый принцип центра масс.
Кроме того, показана общая точка прихода траекторий на поверхность Земли с координатами {ϕРПД, θРПД), которые идентифицированы как координаты передатчика (РПД). При этом использован упомянутый принцип центра масс.
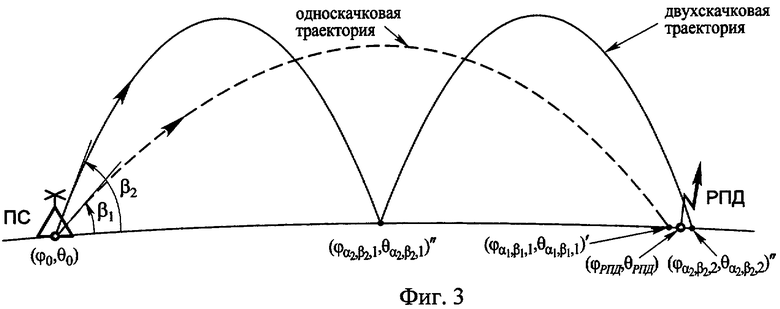
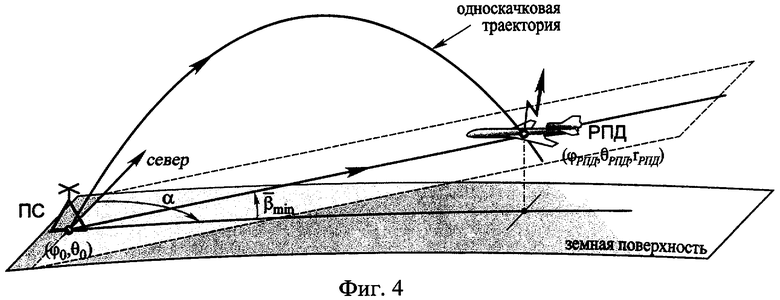
15. При превышении порога многолучевой сигнал идентифицируют как поверхностно-пространственную волну, обусловленную воздушным источником с азимутом, соответствующим азимуту луча с минимальным углом места  а дальность и высоту полета источника находят как точку пересечения односкачковой траектории идеального сигнала с плоскостью, образующей выбранный минимальный угол места
а дальность и высоту полета источника находят как точку пересечения односкачковой траектории идеального сигнала с плоскостью, образующей выбранный минимальный угол места  с поверхностью Земли.
с поверхностью Земли.
На фиг.4 представлена односкачковая траектория модельного сигнала и точка ее пересечения с плоскостью, образующей выбранный минимальный угол места с поверхностью Земли. Сферические координаты точки пересечения траектории и плоскости идентифицируются как сферические координаты (ϕРПД, θРПД, rРПД) РПД, однозначно описывающие дальность и высоту его полета.
Устройство, в котором реализуется предложенный способ (фиг.1), содержит последовательно соединенные антенную систему 1, многоканальное радиоприемное устройство (РПУ) 2, многоканальный аналого-цифровой преобразователь (АЦП) 3, вычислитель 4, блок идентификации сигналов 5, блок обработки однолучевых сигналов 6, блок ионосферного прогноза 7, блок обработки многолучевых сигналов 8, блок отображения 9. Выход вычислителя 4 дополнительно соединен со вторыми входами блока 6 и блока 8. Второй вход блока 9 подключен к выходу блока 6. Второй вход блока 8 соединен с выходом блока 5. Блок 7 и блок 9 имеют входы для подключения внешних систем.
Антенная система 1 содержит опорную антенну с номером n=0 и N антенн с номерами n=1...N, объединенных в решетку.
Многоканальное РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, соответствующей ширине спектра сигнала передатчика. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов, что является основным условием интерферометрической (топографической) регистрации комплексных сигналов передатчиков. Кроме этого РПУ 2 обеспечивает подключение опорной антенны (n=0) вместо всех антенн решетки для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Блок ионосферного прогноза 7 обеспечивает как долгосрочный прогноз параметров ионосферы, так и его корректировку по данным, поступающим от внешних систем вертикального или наклонного зондирования ионосферы.
Устройство работает следующим образом.
Сигналы xn(t), принимаемые на частоте  антеннами системы 1 когерентно преобразуются на более низкую частоту в многоканальном РПУ 2 с полосой приема, соответствующей ширине спектра принимаемого сигнала.
антеннами системы 1 когерентно преобразуются на более низкую частоту в многоканальном РПУ 2 с полосой приема, соответствующей ширине спектра принимаемого сигнала.
Полученные низкочастотные сигналы синхронно преобразуются многоканальным АЦП 3 в цифровые сигналы xn(z), где z - номер временного отсчета сигнала.
В вычислителе 4:
- цифровые сигналы xn(z) синхронно регистрируются на последовательных во времени интервалах приема, то есть цифровые сигналы xn(z) преобразуются в сигналы xn(q, z), где q - номер временного отрезка, 1≤q≤0, то есть входные сигналы разбиваются на смежные временные каналы;
- используя зарегистрированные цифровые сигналы xn(q, z), по известным алгоритмам для каждого q-го временного интервала восстанавливаются и запоминаются число лучей Lg и двумерные (по азимуту  и углу места
и углу места  пеленги каждого луча принятого сигнала, где l=1...L - текущий номер луча.
пеленги каждого луча принятого сигнала, где l=1...L - текущий номер луча.
В блоке идентификации сигналов 5, используя найденные в вычислителе 4 значения числа лучей Lq, определяется среднее значение числа лучей  , по которому идентифицируется сигнал источника как однолучевой при
, по которому идентифицируется сигнал источника как однолучевой при  или многолучевой при
или многолучевой при  .
.
В блоке обработки однолучевых сигналов 6 выполняются следующие действия:
- для сигнала источника, идентифицированного как однолучевой  , используя найденные двумерные пеленги αq=αL=1,q и βq=βL=1,q, определяется средний вектор угловой скорости;
, используя найденные двумерные пеленги αq=αL=1,q и βq=βL=1,q, определяется средний вектор угловой скорости;
- компоненты среднего вектора угловой скорости сравниваются с порогом скорости;
- при превышении порога скорости источник идентифицируется как воздушный;
- используя запомненные угломестные пеленги βL=1,q, определяется изменение во времени наклонной дальности до источника, идентифицированного как воздушный, по формуле Rq=H/sinβL=1,q, где Н - известная высота полета источника сигнала;
- при не превышении порога скорости источник идентифицируется как наземный;
- используя запомненные пеленги αL=1,q и βL=1,q, находятся усредненные пеленги  и
и  источника, идентифицированного как наземный;
источника, идентифицированного как наземный;
- сравнивается усредненный угломестный пеленг наземного источника с порогом;
- при не превышении порога однолучевой сигнал наземного источника идентифицируется как поверхностная волна, описываемая усредненным азимутальным пеленгом ;
- при превышении порога однолучевой сигнал наземного источника идентифицируется как пространственная волна;
- с использованием данных ионосферного прогноза, поступающих от блока 7, моделируется, с привязкой к частоте и временному интервалу приема, многоскачковая траектория обратного распространения идеального сигнала через ионосферу в измеренных направлениях и , по которой определяются координаты предполагаемых точек излучения пространственной волны.
В блоке обработки многолучевых сигналов 8 выполняются следующие действия:
- для сигнала источника, классифицированного как многолучевой, с использованием запомненных в вычислителе 4 пеленгов и  находятся усредненные пеленги каждого луча
находятся усредненные пеленги каждого луча  ,
,  и определяется максимальная разность между усредненными угломестными пеленгами лучей
и определяется максимальная разность между усредненными угломестными пеленгами лучей  где l≠l', l'=1...L;
где l≠l', l'=1...L;
- сравнивается найденная максимальная разность Δ с порогом;
- при не превышении порога многолучевой сигнал идентифицируется как пространственная волна;
- с использованием данных ионосферного прогноза, поступающих от блока 7, моделируются многоскачковые траекторий лучей обратного распространения идеального сигнала через ионосферу в измеренных средних направлениях 
 и выбирается общая точка их прихода на поверхность Земли, то есть определяются координаты точки излучения пространственной волны;
и выбирается общая точка их прихода на поверхность Земли, то есть определяются координаты точки излучения пространственной волны;
- при превышении порога, многолучевой сигнал идентифицируется как поверхностно-пространственная волна, обусловленная воздушным источником с азимутом, соответствующим азимуту луча с минимальным углом места 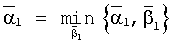 , а дальность и высота полета источника находятся - как точка пересечения односкачковой траектории идеального сигнала с плоскостью, образующей выбранный минимальный угол места поверхностью Земли.
, а дальность и высота полета источника находятся - как точка пересечения односкачковой траектории идеального сигнала с плоскостью, образующей выбранный минимальный угол места поверхностью Земли.
В блоке отображения 8 с использованием табличной формы, декартовых координат, полярных координат и картографического фона отображаются:
- направления, наклонные дальности и координаты источников излучения на Земном геоиде и в пространстве и их динамика;
- тип источника: воздушный или наземный;
- тип сигнала: однолучевой или многолучевой;
- тип волны сигнала: поверхностная, пространственная, поверхностно-пространственная;
- детальные параметры: среднее значение числа лучей, двумерные пеленги каждого луча, средний вектор угловой скорости источника и др.
Таким образом, предложенный способ радиоконтроля за счет использования дополнительной информации о тонкой структуре ДКМВ электромагнитного поля (число лучей и их параметры) в точке приема и среды распространения (параметры модельных траекторий распространения лучей сигнала в трехмерно неоднородной ионосфере) принимаемых сигналов обеспечивает:
- повышение надежности идентификации наземных и воздушных целей благодаря дополнительной информации, получаемой в результате измерения угловой скорости изменения двумерного пеленга источника (при удалении или приближении источника изменяется угломестный пеленг, а при боковом перемещении источника изменяется азимутальный пеленг);
- дополнительную возможность определения предполагаемых точек местоположения наземных источников благодаря идентификации однолучевого сигнала, приходящего в точку приема пространственной (ионосферной) волной после отражения от ионосферы, и моделированию траектории обратного распространения этого сигнала через ионосферу;
- дополнительную возможность определения местоположения наземных источников благодаря идентификации многолучевого сигнала, приходящего в точку приема пространственной (ионосферной) волной после отражения от ионосферы, и сопоставлению модельных траекторий распространения всех лучей принятого сигнала,
- дополнительную возможность определения местоположения воздушных объектов с неизвестной высотой полета благодаря идентификации многолучевого сигнала, приходящего в точку приема поверхностно-пространственной волной, и моделированию траектории обратного распространения этого сигнала через ионосферу, что в совокупности существенно повышает эффективность радиоконтроля.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US, патент 3887923, кл. G 01 S 5702, 1975 г.
2. RU, патент 2158002, кл. 7 G 01 S 3/14, 5/04, 2000 г.
3. Айфрамович Э.Л. Интерференционные методы радиозондирования ионосферы. М.: Наука. 1982.
4. Василенко Г.И., Тараторкин A.M. Восстановление изображений. - М.: Радио и связь, 1986. - 304 с.
5. Bilitza D. Ionospheric Models for Radio Propagation Studies // The review of radio science, 1999-2002 / Ed. W. Ross Stone, IEEE Press. 2002. PP.625-679.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2431864C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ РАДИОКОНТРОЛЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444753C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2429501C1 |
Изобретение относится к радиотехнике и может быть использовано в системах пассивного радиоконтроля для идентификации, пеленгации и определения местоположения наземных и воздушных объектов по излучениям их ДКМВ передатчиков при использовании одной приемной станции. Технический результат заключается в уменьшении ошибок пеленгации, обусловленных неопределенностью относительно типа приходящей в точку приема волны: прямая волна от воздушной цели; пространственная волна, отразившаяся от ионосферы; поверхностная волна; поверхностно-пространственная волна. Для этого определяют количество лучей, отразившихся от цели, и для однолучевого сигнала определяют наземный или воздушный объект по скорости объекта, для наземного объекта определяют тип приходящей волны сравнением с порогом усредненного угломестного пеленга, для многолучевого сигнала получают усредненные пеленги каждого луча и находят максимальную разность между усредненными пеленгами лучей, сравнивают максимальную разность с порогом и по результату определяют тип волны: поверхностно-пространственная волна или пространственная волна, и исходя из этого вычисляют координаты объекта. 4 ил.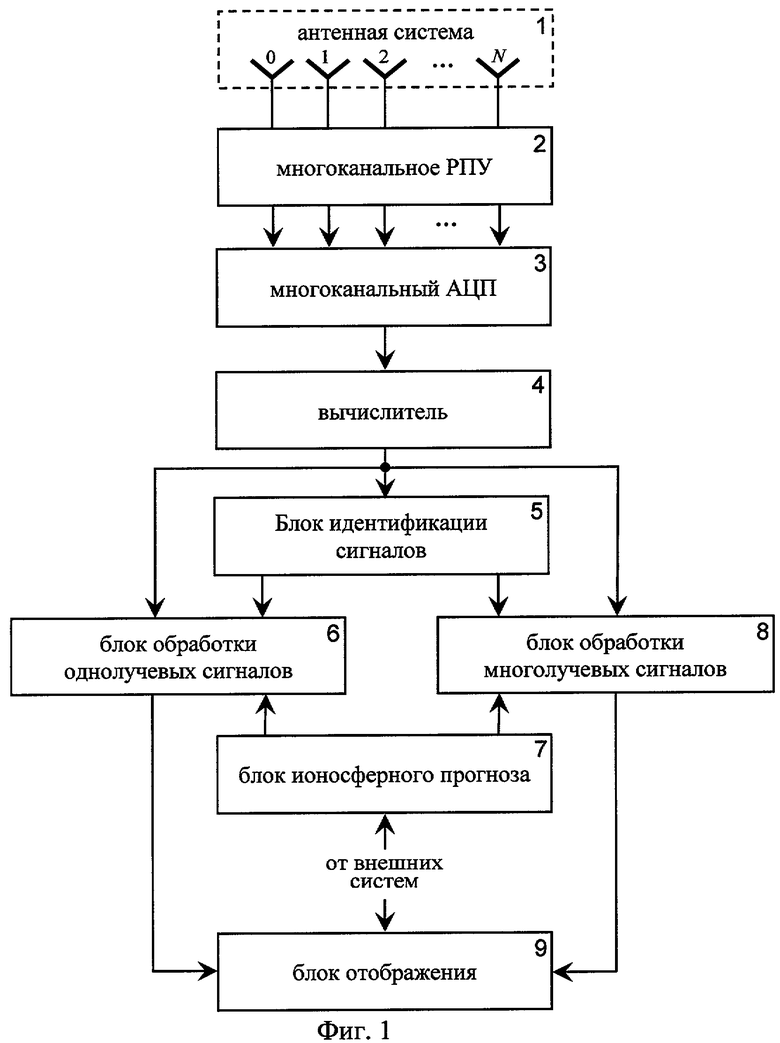
Способ радиоконтроля, включающий прием решеткой из отдельных антенн на заданной частоте сигнала источника радиоизлучения, когерентный перенос принятых каждой антенной сигналов на более низкую частоту, синхронное преобразование этих сигналов в цифровые сигналы, отличающийся тем, что синхронно регистрируют цифровые сигналы на последовательных во времени интервалах приема, для каждого временного интервала восстанавливают по известным алгоритмам и запоминают число лучей и двумерные пеленги каждого луча принятого сигнала, определяют среднее число лучей, по которому идентифицируют сигнал источника как однолучевой или многолучевой, для сигнала источника, идентифицированного как однолучевой, преобразованием запомненных двумерных пеленгов определяют средний вектор угловой скорости, компоненты которого сравнивают с пороговым значением скорости, при превышении которого источник идентифицируют как воздушный и, используя запомненные угломестные пеленги однолучевого сигнала и известную высоту полета источника сигнала, определяют изменение во времени наклонной дальности до источника сигнала, при не превышении порога скорости источник идентифицируют как наземный, после чего, используя запомненные пеленги однолучевого сигнала, получают его усредненные пеленги, сравнивают с порогом усредненный угломестный пеленг источника, идентифицированного как наземный, при не превышении порога однолучевой сигнал наземного источника идентифицируют как поверхностную волну, описываемую усредненным азимутальным пеленгом, при превышении порога, однолучевой сигнал наземного источника идентифицируют как пространственную волну, координаты предполагаемых точек излучения которой определяют, моделируя с привязкой к частоте и временному интервалу приема многоскачковую траекторию обратного распространения модельного сигнала через ионосферу в измеренных направлениях, для сигнала источника, классифицированного как многолучевой, используя запомненные пеленги, получают усредненные пеленги каждого луча и находят максимальную разность между усредненными угломестными пеленгами лучей, сравнивают максимальную разность с порогом, при не превышении порога, многолучевой сигнал идентифицируют как пространственную волну, координаты точки излучения которой определяют, моделируя многоскачковые траектории лучей обратного распространения модельного сигнала через ионосферу в измеренных направлениях и выбирая общую точку их прихода на поверхность Земли, при превышении порога, многолучевой сигнал идентифицируют как поверхностно-пространственную волну, обусловленную воздушным источником с азимутом, соответствующим азимуту луча с минимальным углом места, а дальность и высоту полета источника находят как точку пересечения односкачковой траектории модельного сигнала с плоскостью, образующей выбранный минимальный угол места с поверхностью Земли.
| US 3887923, 03.06.1975 | |||
| US 5341142, 23.08.1994 | |||
| US 2003156056 А1, 21.08.2003 | |||
| US 5160932, 03.11.1992 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СТЕНД ДЛЯ ИСПЫТАНИЯ ДЫХАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2256107C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |

