Изобретение относится к области космической техники и может быть использовано для ориентации орбитального космического аппарата (КА) с одновременной ориентацией батарей солнечных (БС) на Солнце. Способ предназначен для КА с БС, которые допускают одноосное программно-управляемое вращение панелей и ось вращения которых расположена произвольно в конструктиве КА, кроме того, изобретение ограничивается классом КА, для которых достаточно иметь ориентацию только по местной вертикали.
Известны способы управления ориентацией КА в орбитальной системе координат (ОСК) с программно-управляемыми панелями БС, см. например, [1÷5]. В цитируемых источниках КА ориентируется либо нормалями к панелям БС на Солнце и теряет при этом орбитальную ориентацию, либо находится в ориентированном относительно орбитальной системы координат (ОСК) положении, при этом панели БС поворачивают в сторону Солнца на максимально возможный угол. Во втором случае нормали к панелям БС не совпадают с направлением на Солнце, что существенно снижает их эффективность, которая зависит от косинуса угла между нормалью к панелям БС и направлением на Солнце.
Известен, например, способ ориентации КА (см. патент США 6293502 (MПК7 B64G 1/24 Hughes Electronics Corp., Fowell Richard A. №09/368202; заявлен 04.08.99; опубликован 25.09.2001, НПК 244/164), в котором реализуется точная ориентация панелей БС на Солнце в течение всего срока службы КА при ориентации одной из осей КА на центр Земли и вращении крыльев БС относительно двух ортогональных осей. Недостатком способа является сложное двухосевое вращение панелей БС.
Наиболее близким является техническое решение, в котором рассматривается управление ориентацией орбитального КА с управляемыми панелями БС (RU 2535979). Способ включает ориентацию КА по местной вертикали, вращение КА относительно местной вертикали (по курсу) до момента попадания Солнца в поле зрения датчика Солнца (ДС) и определение с помощью ДС направления на Солнце. К недостаткам способа следует отнести усложненную - двухосную кинематику поворота панелей БС и неавтономность управления БС вследствие необходимости расчета положения Солнца в ССК (с использованием плоскости Земля - Солнце - КА), т.к. при этом необходимо получать от внешней системы текущие значения угла склонения Солнца над плоскостью орбиты.
Целью изобретения является устранение указанных недостатков, а именно использовать только одноосный привод БС и добиться полной автономности (т.е. без использования навигационных данных о положении Солнца - склонения и восхождения) и непрерывности ориентации нормали к панелям БС на Солнце.
С этой целью, в отличие от известного способа, включающего ориентацию КА по местной вертикали, вращение КА относительно местной вертикали (по курсу) до момента попадания Солнца в поле зрения ДС и определение в осях ДС направления на Солнце, выполняют следующие операции.
По показаниям ДС определяют угловое положение Солнца относительно ССК и по известному угловому положению оси вращения БС относительно ССК рассчитывают относительный программный угол поворота КА по курсу - ψПР, при котором ось вращения БС составит прямой угол с направлением на Солнце. После этого рассчитывают угол поворота панелей БС - θ, при котором нормаль к панелям БС совпадет с направлением на Солнце, после чего поворачивают КА и панели БС на расчетное значение углов, добиваясь совмещение нормали к панелям БС с направлением на Солнце. В дальнейшем продолжают ориентировать КА по местной вертикали, при этом непрерывно поворачивают КА относительно местной вертикали по курсу и вращают БС, удерживая направление нормали к панели БС совпадающим с направлением на Солнце в течение всего времени полета.
В соответствии с п. 2 формулы изобретения на момент перехода КА на неосвещенную Солнцем сторону орбиты запоминают значения угловой скорости поворота КА относительно местной вертикали -  и скорости поворота панелей БС -
и скорости поворота панелей БС -  относительно собственной оси вращения. Указанные скорости вводят в систему управления КА и контур привода панелей БС с последующим вращением с запомненными скоростями КА по курсу и панелей БС относительно собственной оси вращения до выхода КА на освещенный участок орбиты.
относительно собственной оси вращения. Указанные скорости вводят в систему управления КА и контур привода панелей БС с последующим вращением с запомненными скоростями КА по курсу и панелей БС относительно собственной оси вращения до выхода КА на освещенный участок орбиты.
Ниже приведен пример практической реализации предлагаемого способа.
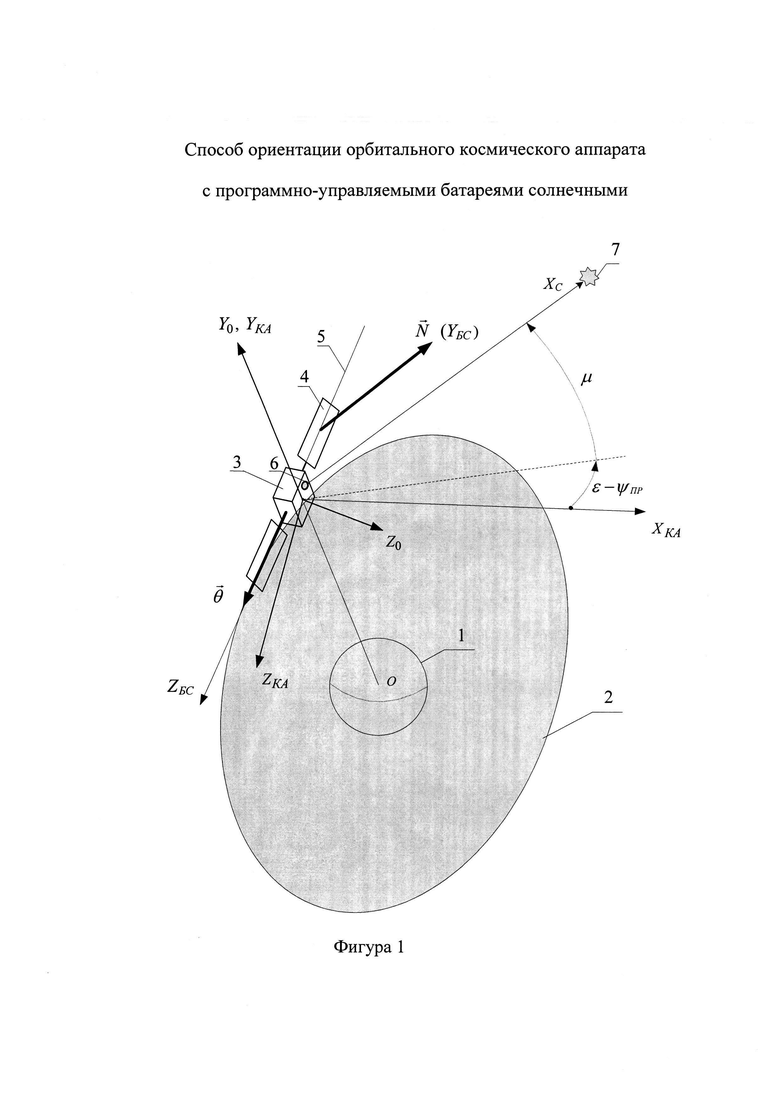
На фигуре 1 обозначено:
1 - Земля с центром "О";
2 - плоскость орбиты;
3 - КА;
4 - панели БС с осью вращения 5;
6 - ДС;
7 - Солнце;
μ, (ε-ψПР) - угловое положение Солнца относительно КА;
ψПР - относительный программный угол поворот КА;
 - вектор угла поворота (θ) БС относительно корпуса КА;
- вектор угла поворота (θ) БС относительно корпуса КА;
 - нормаль к панелям БС, совпадает с осью YБС;
- нормаль к панелям БС, совпадает с осью YБС;
X0Y0Z0 - ОСК (ось Х0 не показана для упрощения чертежа);
XКАYKAZKA - ССК КА.
На фигуре 2 показано положение Солнца относительно ССК, где обозначено:
 - вектор, направленный на Солнце;
- вектор, направленный на Солнце;
 - вектор нормали к панелям БС;
- вектор нормали к панелям БС;
XCYCZC - оси, связанные с направлением на Солнце, оси YCZC не показаны с целью упрощения и большей наглядности чертежа;
XKAYKAZКА - ССК КА;
XБСYБСZБС - система координат, связанная с панелями и осью вращения БС;
μ, (ε-ψПР) - угловое положение Солнца относительно ССК;
ψПР - относительный программный угол поворота КА;
α0, β0 - угловое положение оси поворота БС в теле КА относительно ССК;
 ,
,  - вектор угла и угловой скорости поворота БС относительно собственной оси ZБС.
- вектор угла и угловой скорости поворота БС относительно собственной оси ZБС.
На фигуре 3 показано положение одноосной БС относительно ССК КА в общем случае, где обозначено:
XБСYБСZБС - система координат, связанная с панелями и осью вращения БС;
 - вектор нормали к плоскости панелей БС, совпадает в примере с осью YБС;
- вектор нормали к плоскости панелей БС, совпадает в примере с осью YБС;
 ,
,  - вектор угла и угловой скорости поворота БС относительно собственной оси ZБС.
- вектор угла и угловой скорости поворота БС относительно собственной оси ZБС.
α0, β0 - углы установки БС относительно ССК КА.
Угловое положение Солнца в координатах ССК КА определяется следующим образом (см. фиг. 2):

МПр, МКр - матрица положения приборных осей ДС относительно установочного кронштейна и матрица установочного кронштейна ДС относительно ССК, для простоты приравнены единичной матрице.

Угловое положение панелей БС в координатах КА определяется следующим образом (см. фиг. 1, 3):


Из (1) и (2) вычисляются относительный угол поворота КА - ψПР вокруг местной вертикали и угол поворота БС - θ для совмещения нормали -  панелей БС с направлением на Солнце.
панелей БС с направлением на Солнце.
Удобный способ расчета заключается в следующем.
Так как нормаль  к панелям БС должна совпасть с осью ХС, которая, в свою очередь, должна совпасть с направлением на Солнце -
к панелям БС должна совпасть с осью ХС, которая, в свою очередь, должна совпасть с направлением на Солнце -  , то это означает, что оси ZБС и ХБС должны быть ортогональны к оси ХС, направленной на Солнце. Следовательно, можно составить два скалярных уравнения:
, то это означает, что оси ZБС и ХБС должны быть ортогональны к оси ХС, направленной на Солнце. Следовательно, можно составить два скалярных уравнения:


(4)
или


Решение (1-6) дает значения ψПР и θ. Например, для случая β0=0 (ось вращения панелей конструктивно повернута только вокруг вертикальной оси YKA космического аппарата на угол α0, получим:


Таким образом, для точной ориентации нормали к панелям БС на Солнце, необходимо от исходного положения КА повернуть КА вокруг местной вертикали по курсу на угол ψПР=ε-α0 и повернуть панели БС на угол
 .
.
В частности, когда sinμ=0 поворот БС должен производиться на угол: - 90°.
Указанные выше движения КА автоматически совершает в течение всего времени полета следующее:
- ориентируется по местной вертикали таким образом, что ось YKA в процессе всего времени полета направлена на центр Земли «О» (см. фиг. 1) и совпадает с осью YO ОСК;
- непрерывно вращается по курсу относительно местной вертикали (той же оси YO ОСК) на расчетный угол ψПР(t);
- поворачивает панели БС на Солнце на угол θ(t).
В процессе этих движений направление нормали  к панелям БС удерживается совпадающим с направлением на Солнце в течение сколь угодно длительного времени, в том числе заданного.
к панелям БС удерживается совпадающим с направлением на Солнце в течение сколь угодно длительного времени, в том числе заданного.
Такому КА подходит название «танцующий спутник» - «кружит и непрерывно смотрит панелями БС на Солнце».
Для КА, периодически пересекающих терминатор Земли, на теневой стороне Земли Солнце исчезает из поля зрения ДС и управление по п. 1 становится невозможным. Если остановить процесс ориентации БС, то через половину витка ошибка ориентации панелей на Солнце может достигнуть 180°. Это возможно, если, например, плоскость орбиты КА перпендикулярна плоскости терминатора, а панели БС ориентированы в теле КА собственной осью вращения, совпадающей с осью тангажа КА (ZКА). Очевидно, что угловая скорость поворота панелей БС совпадет с орбитальной угловой скоростью. Следовательно, при «замерших» панелях при выходе КА на освещенную сторону орбиты ошибка направления нормали на Солнце составит ~180°.
Для исключения этих ошибок в соответствии с п. 2 формулы на момент перехода КА на неосвещенную Солнцем сторону орбиты, запоминают скорость поворота КА относительно местной вертикали - и скорость поворота панелей  а после выхода на освещенный участок орбиты повторяют операции по п. 1. В этом случае после перехода КА на освещенный участок орбиты ошибки ориентации нормали БС на Солнце будут минимальны и будут быстро устранены выполнением операций по п. 1.
а после выхода на освещенный участок орбиты повторяют операции по п. 1. В этом случае после перехода КА на освещенный участок орбиты ошибки ориентации нормали БС на Солнце будут минимальны и будут быстро устранены выполнением операций по п. 1.
ЛИТЕРАТУРА
1. Елисеев А.С. Техника космических полетов. - М.: Машиностроение, 1983.
2. Крошкин М.Г. Физико-технические основы космических исследований. - М.: Машиностроение, 1969.
3. Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. - М.: Наука, 1984.
4. Инженерный справочник по космической технике. - М.: Изд-во МО СССР, 1969.
5. Е.Н. Якимов, В.А. Раевский, М.В. Лукьяненко. Синтез системы управления ориентацией космического аппарата на высокоэллиптической орбите, ОАО «Информационные спутниковые системы» имени академика М.Ф. Решетнева, г. Красноярск, Сибирский аэрокосмический университет им. академика М.Ф. Решетнева, с. 153-159.
6. Патенты RU: 2021173, 2021174, 2361788, 2368545, 2457158, 2535979; US: 4031444.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| СПОСОБ КОМПЕНСАЦИИ ОШИБОК ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597017C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ | 2014 |
|
RU2562904C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2014 |
|
RU2569999C2 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКОЙ | 2015 |
|
RU2604268C2 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814307C1 |


Изобретение относится к управлению относительным движением космических аппаратов (КА), преимущественно с одноосно вращающимися панелями солнечных батарей (СБ). В процессе полета ориентированный по местной вертикали КА непрерывно вращается по курсу, а панели СБ синхронно и непрерывно поворачиваются нормалью к Солнцу. Алгоритм такого управления КА и СБ реализуется по полученным в конечном виде математическим зависимостям. Для сохранения ориентации СБ на Солнце на теневых участках орбиты запоминаются и сохраняются угловые скорости вращения КА и СБ в момент входа в тень. Техническим результатом изобретения является упрощение и повышение автономности средств управления КА и СБ. 1 з.п. ф-лы, 3 ил.
1. Способ ориентации орбитального космического аппарата (КА) с программно-управляемыми батареями солнечными (БС), включающий ориентацию КА по местной вертикали, вращение КА относительно местной вертикали по курсу до момента попадания Солнца в поле зрения датчика Солнца (ДС) и определение в осях ДС направления на Солнце, отличающийся тем, что по показаниям ДС определяют угловое положение Солнца относительно связанной системы координат (ССК) КА, а также по известному конструктивному положению оси вращения БС относительно ССК рассчитывают относительный угол (ψПР) поворота КА по курсу, при котором ось вращения БС составит прямой угол с направлением на Солнце, и угол (θ) поворота панелей БС, при котором нормаль к панелям БС совпадет с направлением на Солнце, после чего поворачивают КА и панели БС на расчетные значения указанных углов, добиваясь совмещения нормали к панелям БС с направлением на Солнце, в дальнейшем продолжают ориентировать КА по местной вертикали, при этом непрерывно поворачивают КА относительно местной вертикали по курсу и вращают БС, удерживая направление нормали к панели БС совпадающим с направлением на Солнце в течение всего времени полета.
2. Способ по п.1, отличающийся тем, что на момент перехода КА на неосвещенную Солнцем сторону орбиты запоминают значения угловой скорости ( ) поворота КА относительно местной вертикали и угловой скорости (
) поворота КА относительно местной вертикали и угловой скорости ( ) поворота панелей БС относительно собственной оси вращения, которые вводят в систему управления КА и контур привода панелей БС с последующим вращением с запомненными угловыми скоростями КА по курсу и панелей БС относительно собственной оси вращения, до выхода КА на освещенный участок орбиты.
) поворота панелей БС относительно собственной оси вращения, которые вводят в систему управления КА и контур привода панелей БС с последующим вращением с запомненными угловыми скоростями КА по курсу и панелей БС относительно собственной оси вращения, до выхода КА на освещенный участок орбиты.
| СИСТЕМА ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2012 |
|
RU2535979C2 |
| СПОСОБ ОРИЕНТАЦИИ СОЛНЕЧНОЙ БАТАРЕИ ИСЗ | 2007 |
|
RU2350522C2 |
| СПОСОБ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ОСЕЙ СВЯЗАННОЙ СИСТЕМЫ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2428361C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| US 6293502 B1, 25.09.2001 | |||
| US 6142422 A, 07.11.2000. | |||

