Изобретение относится к космической технике и может быть использовано в системах управления движением (СУД) вокруг центра масс космических аппаратов (КА).
Известно, что при использовании только информации о направлении на Солнце можно обеспечить ориентацию в пространстве одной из осей связанной системы координат космического аппарата (см. Солодов А.В. Инженерный справочник по космической технике. Изд. 2-е. М., Воениздат, 1977, стр.55), по которой ориентировано поле обзора прибора, измеряющего это направление. Такую ориентацию называют «солнечной» ориентацией. Две другие оси связанной системы координат КА будут занимать в пространстве неизвестное положение. Этот факт значительно сужает возможность переориентации в пространстве осей связанной системы координат КА. Известен способ ориентации в пространстве осей связанной системы координат КА по осям системы, использующей направление от центра Земли и направление движения центра масс КА в плоскости орбиты (см. Солодов А.В. Инженерный справочник по космической технике. Изд. 2-е. М., Воениздат, 1977, стр.54), называемой орбитальной (подвижной) системой координат (ОСК) и задающей следующую ориентацию осей:
- ось ХОСК лежит в плоскости орбиты и направлена в сторону линейного движения КА по орбите;
- ось YОСК лежит в плоскости орбиты на линии, соединяющей центр Земли с центром масс КА, и направлена от центра Земли (зенит);
- ось ZОСК дополняет оси ХОСК и YОСК до правой системы координат.
Из патентной литературы известны различные способы ориентации трех осей связанной системы координат КА в орбитальную систему координат (ОСК), использующие информацию как приборов ориентации на Землю (ПОЗ) и на Солнце (ПОС), так и информацию от других измерительных приборов (см., например, авт.св. № 1655842, кл. В64G 1/00 от 02.12.1988 г.).
Известен способ ориентации трех осей связанной системы координат КА в ОСК, использующий только информацию о направлении на Солнце от прибора, измеряющего это направление (см., например, RU 2247684 С2, кл. В64G 1/24 от 25.03.2003 г.).
Однако при жестко закрепленных на корпусе КА панелях солнечных батарей (СБ) совмещение осей связанной системы координат космического аппарата с орбитальной системой координат (ОСК) позволяет использовать за виток только часть солнечной энергии для заряда бортовых батарей (ББ) из-за того, что ось связанной системы координат космического аппарата, ориентированная по оси YОСК, сохраняя направление на Землю, отворачивает рабочую поверхность солнечных батарей от Солнца.
Задачей данного изобретения является создание способа ориентации осей связанной системы координат космического аппарата в пространстве для достижения технического результата - используя направление на Солнце, плоскость орбиты космического аппарата и направление вектора линейной скорости движения КА по орбите, задать такую ориентацию осям связанной системы координат космического аппарата, которая обеспечит условия для максимального использования солнечной энергии космическим аппаратом с жестко закрепленными на нем солнечными батареями, создаст возможность для непосредственной переориентации осей связанной системы координат КА в любую другую прямоугольную декартовую систему координат, уменьшая при этом энергозатраты космического аппарата, как на ориентацию осей связанной системы координат КА по сравнению с его ориентацией из «солнечной» одноосной ориентации или неориентированного в пространстве положения, так и на коррекцию параметров орбиты (апогей, перигей).
Эта задача решается тем, что в способе ориентации в пространстве осей связанной системы координат космического аппарата - XКА, YКА, ZКА эти оси совмещают с осями солнечно-орбитальной системы координат - ХСОСК, YСОСК, ZСОСК, у которой для орбит полета к планетам Солнечной системы:
- ось ХСОСК лежит в плоскости орбиты КА и направлена в сторону линейного движения КА по орбите;
- ось YСОСК направлена на Солнце;
- ось ZСОСК дополняет оси ХСОСК и YСОСК до правой, прямоугольной системы координат, квазиинерциальной по отношению к Солнцу,
а для околоземных орбит:
- ось ХСОСК лежит в плоскости орбиты КА и одну часть витка, начиная от точки орбиты над экватором Земли, через которую проходит направленная в надир отвесная линия, направлена в сторону линейного движения КА по орбите, а другую часть витка, начиная из точки орбиты над экватором Земли, через которую проходит отвесная линия, направленная в зенит, направлена в противоположную сторону;
- ось YСОСК направлена на Солнце;
- ось ZСОСК дополняет оси ХСОСК и YСОСК до правой, прямоугольной системы координат, квазиинерциальной по отношению к Солнцу.
Далее изобретение поясняется с использованием чертежей, изображающих расположение осей связанной с космическим аппаратом системы координат, ориентацию осей солнечно-орбитальной и орбитальной систем координат в пространстве.
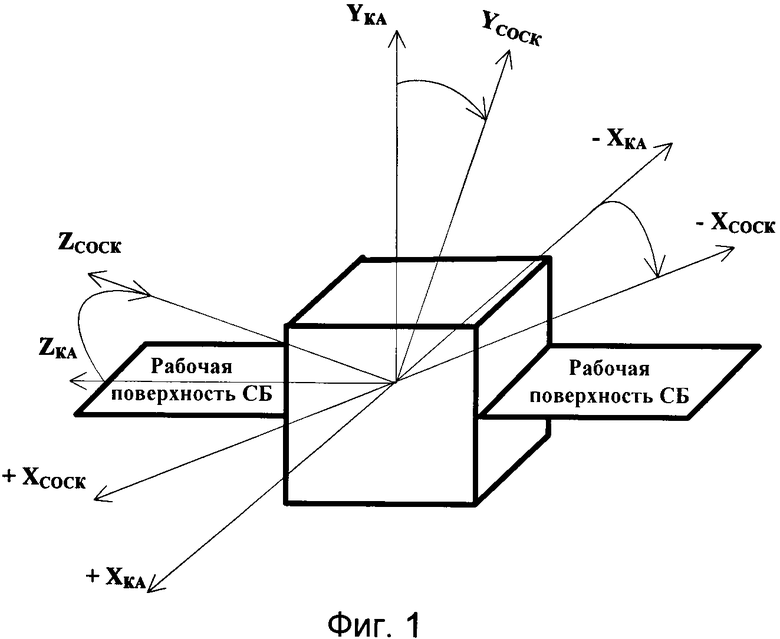
На фиг.1 изображен пример расположения осей связанной системы координат космического аппарата на КА и направление их перемещения в пространстве для совмещения с осями солнечно-орбитальной системы координат.
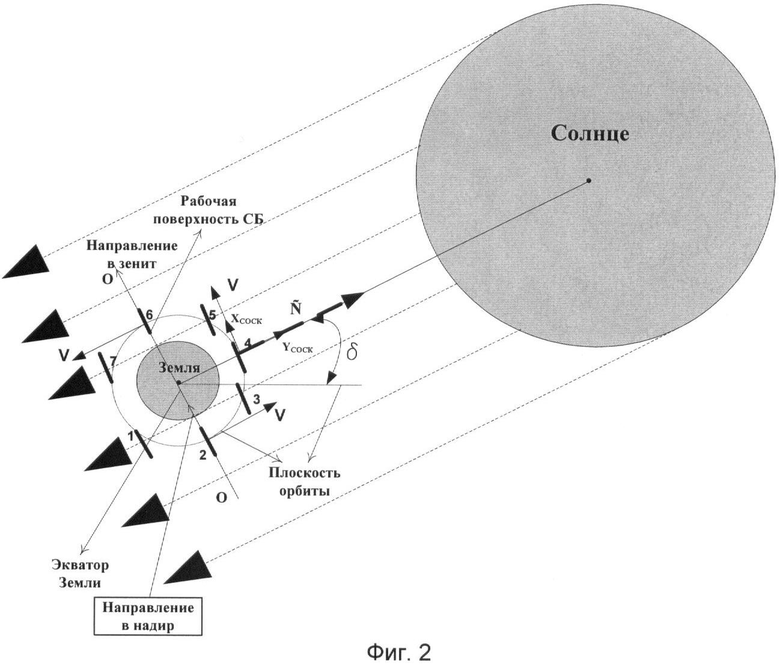
На фиг.2 изображено положение рабочих поверхностей солнечных батарей космического аппарата и перпендикуляра к ним в пространстве для семи точек орбиты, отклоненной на угол δ по отношению к направлению на Солнце. Изображена отвесная линия, которая пересекается с поверхностью небесной сферы в точках, называемых зенит (над головой наблюдателя), и в прямо противоположной точке, называемой надиром (см. Солодов А.В. Инженерный справочник по космической технике. Изд. 2-е. М., Воениздат, 1977, стр.17). Показано направление вектора линейной скорости движения центра масс КА по орбите, вектора нормали к рабочей поверхности солнечных батарей КА, направленного на Солнце, а также направление осей ХСОСК, YСОСК по отношению к этим векторам. Указаны семь точек орбиты, в которых показана постоянная ориентация рабочих поверхностей солнечных батарей на Солнце.
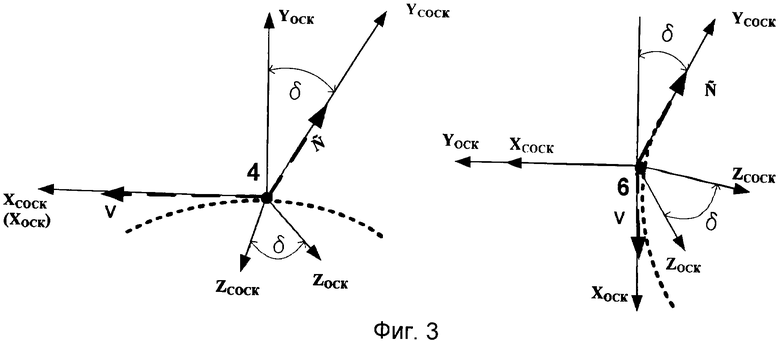
На фиг.3 изображена для точек 4 и 6 фиг.2 взаимная ориентация осей солнечно-орбитальной и орбитальной систем координат в пространстве. Также показана ориентация вектора линейной скорости движения центра масс космического аппарата на орбите и вектора нормали к рабочей поверхности солнечных батарей КА, направленного на Солнце.
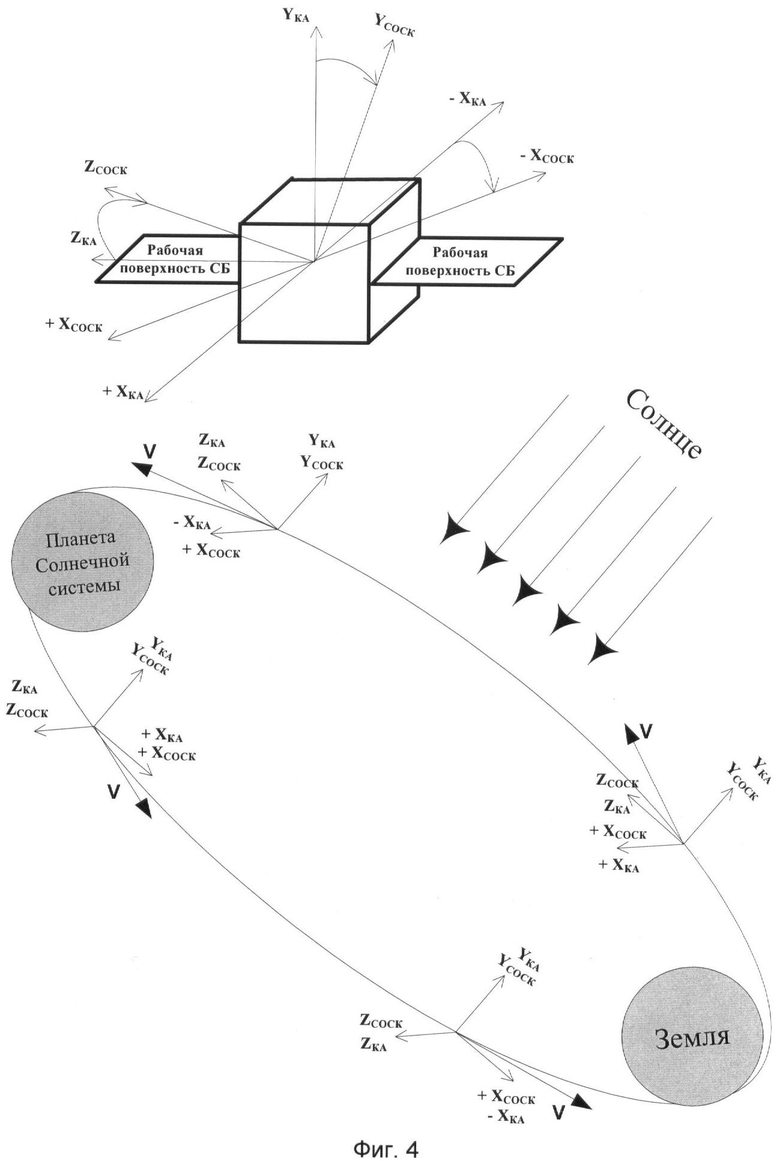
На фиг.4 изображена взаимная ориентация осей связанной системы координат космического аппарата и осей солнечно-орбитальной системы координат в разных точках орбиты полета космического аппарата к планетам Солнечной системы. В этих точках орбиты также показано направление вектора линейной скорости движения центра масс космического аппарата по орбите.
На фиг.1, 2, 3, 4 использованы следующие обозначения:
XКА, YКА, ZКА - взаимно перпендикулярные оси связанной системы координат космического аппарата (оси КА);
ХСОСК, YСОСК, ZСОСК - взаимно перпендикулярные оси солнечно-орбитальной системы координат, с которыми необходимо совместить оси связанной с космическим аппаратом системы координат при ориентации КА в COCK,
ХОСК, YОСК, ZОСК - оси орбитальной (подвижной) системы координат;
δ - угол между плоскостью орбиты КА и направлением на Солнце;
 - вектор нормали к рабочей поверхности солнечных батарей КА,
- вектор нормали к рабочей поверхности солнечных батарей КА,
направленный на Солнце;
О - отвесная линия;
V - вектор линейной скорости движения центра масс КА по орбите;
1÷7 - точки орбиты, в которых показана постоянная ориентация рабочих поверхностей солнечных батарей на Солнце.
Из описания солнечно-орбитальной системы координат (COCK) видно, что это правая, прямоугольная (или декартовая, или ортогональная) система координат (см. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. 13-е изд. исправленное. - М., Наука, Гл. ред. физ.-мат. лит., 1986 г., стр. 387, 197), квазиинерциальная по отношению к Солнцу, т.к. направление на Солнце для околоземных орбит практически неизменно, а ее оси попарно перпендикулярны. Понятие: - «в сторону линейного движения КА по орбите» обозначает то, что одна из осей связанной системы координат космического аппарата и вектор линейной скорости центра масс КА находятся в одной полусфере, ограниченной плоскостью, перпендикулярной этой оси.
Точка орбиты 2 на фиг.2 - это точка, через которую проходит отвесная (или вертикальная) линия, направленная в надир, над экватором Земли, а через точку 6 проходит отвесная (вертикальная) линия, направленная в зенит, над экватором Земли (см. Солодов А.В. Инженерный справочник по космической технике. Изд. 2-е. М., Воениздат, 1977 стр.17).
Ось ХСОСК лежит на линии пересечения плоскости орбиты и плоскости рабочей поверхности солнечных батарей. Вектор линейной скорости движения центра масс КА по орбите в точке 2 направлен от рабочей поверхности солнечных батарей, а в точке 6 он развернут на 180°. В точках 2 и 6 вектора линейной скорости перпендикулярны оси ХСОСК.
В точке 4 вектор линейной скорости движения центра масс КА по орбите лежит в плоскости рабочей поверхности солнечных батарей и направлен в ту же сторону, что и ось ХСОСК.
Таким образом, ось ХСОСК лежит в плоскости орбиты КА и одну часть витка, начиная из точки орбиты над экватором Земли, через которую проходит отвесная линия, направленная в надир, направлена в сторону линейного движения КА по орбите, а другую часть витка, начиная из точки орбиты над экватором Земли, через которую проходит отвесная линия, направленная в зенит, в противоположную сторону. Описанная ориентация оси ХСОСК - положительная (+ХСОСК), как показано на фиг.1. Противоположная ориентация оси ХСОСК - отрицательная (-ХСОСК), как показано на фиг.1.
В качестве примера, для совмещения осей связанной системы координат космического аппарата, ориентированных в солнечно-орбитальной системе координат, с осями орбитальной систем координат необходимо в общем случае сделать два разворота космического аппарата, как показано на фиг.3:
- вокруг оси XКА, исходно совмещенной с осью ХСОСК на угол δ для приведения оси YКА (YСОСК) в плоскость орбиты;
- вокруг оси ZКА на угол, зависящий от точки орбиты, для совмещения осей XКА и ХОСК.
В частном случае для точки 4 околоземной орбиты, как показано на фиг.3, достаточно сделать один разворот вокруг оси XКА, исходно совмещенной с осью ХСОСК, на угол δ.
Для возврата к ориентации осей XКА, YКА, ZКА в солнечно-орбитальную систему координат из орбитальной системы координат в общем случае необходимо сделать два разворота.
Знаки углов разворотов вокруг осей связанной системы координат космического аппарата определяет конструкция космического аппарата, а именно как ориентированы его связанные оси - ХКА, YКА, ZКА по отношению к осям солнечно-орбитальной системы координат - XСОСК, YСОСК, ZСОСК и орбитальной системе координат - ХОСК, YОСК, ZОСК.
Аналогично описанному примеру ориентации осей связанных системы координат космического аппарата - XКА, YКА, ZКА из солнечно-орбитальной системы координат в орбитальную систему координат и обратно можно ориентировать эти оси из солнечно-орбитальной системы координат в любую другую известную систему координат, причем как инерциальную, так и подвижную.
Для перехода из COCK в любую другую трехосную систему координат и обратно достаточно не более двух разворотов вокруг осей связанной системы координат космического аппарата, что требует меньшего расхода рабочего тела или кинетического момента его исполнительными органами по сравнению с ориентацией осей связанной системы координат космического аппарата из неориентированного в пространстве положения или из «солнечной» одноосной ориентации.
Направление оси ХСОСК в пространстве, как показано на фиг.1 и фиг.4, может быть как положительное +ХСОСК, так и отрицательное -ХСОСК. Система, использующая положительное направление оси ХСОСК, называется солнечно-орбитальной системой координат (COCK), а использующая отрицательное направление оси ХСОСК называется развернутой солнечно-орбитальной системой координат (РСОСК).
Если по оси связанной системы координат космического аппарата, например +XКА, которая будет совмещена с осью +ХСОСК, как показано на фиг.4, установить двигатель, управляющий движением центра масс КА по орбите, то его можно использовать для увеличения линейной скорости движения КА по орбите (разгона). Этот же двигатель можно использовать и для уменьшения линейной скорости движения КА по орбите (торможения), если ось -XКА связанной системы координат космического аппарата совместить с осью +ХСОСК, как показано на фиг.4.
Для реализации этой ориентации достаточно сделать разворот на 180° вокруг оси связанной системы координат космического аппарата, например +YКА, которая совмещена с осью YСОСК солнечно-орбитальной системы координат.
Ось+ХСОСК и вектор линейной скорости движения центра масс КА, как показано на фиг.4, лежат в плоскости орбиты, направлены в одну сторону, но в общем случае не совпадают по направлению. В таких случаях для получения максимально возможного изменения модуля вектор линейной скорости движения центра масс КА по орбите при минимальном расходе рабочего тела двигательной установкой, обычно:
- поддерживается имеющаяся ориентация осей связанной системы координат космического аппарата и включается на непродолжительное время двигатель, управляющий линейным движением центра масс КА по орбите;
- проводится измерение ускорения линейного движения центра масс КА по орбите соответствующим прибором, установленным на КА, и расчет величины приращения модуля вектор линейной скорости движения центра масс ΔVИЗМ за время работы двигателя;
- вычисляется косинус угла θ между вектором линейной скорости движения центра масс (V) и осью связанной системы координат космического аппарата, по которой ориентирован двигатель, управляющий линейным движением центра масс КА по орбите, и прибор, измеряющий ускорение, по формуле:
cos (θ)=ΔVИЗМ/ΔVРАСЧ,
где: ΔVРАСЧ - расчетное значение приращения модуля вектор линейной скорости движения центра масс КА по орбите, при условии совмещения вектора V и оси связанной системы координат космического аппарата, по которой ориентирован двигатель, управляющий линейным движением центра масс КА, полученное исходя из массово-инерциальных характеристик КА, параметров имеющейся орбиты, времени включения и тяги двигателя,
и через arcos вычисляется значение угла θ;
- выполняется разворот на угол θ вокруг оси связанной системы координат космического аппарата, перпендикулярной плоскости орбиты, для совмещения вектора V и оси связанной системы координат космического аппарата, по которой ориентирован двигатель, управляющий линейным движением центра масс КА;
- поддерживается полученная ориентация осей связанной системы координат космического аппарата и включается двигатель, управляющий линейным движением центра масс КА для коррекции апогея или перигея орбиты.
Все сказанное справедливо как для орбит полета к планетам Солнечной системы, так и для околоземных орбит, при условии совмещения осей связанной системы координат космического аппарата с осями солнечно-орбитальной системы координат.
Тот факт, что ось ХСОСК солнечно-орбитальной системы координат лежит в плоскости орбиты, позволяет экономить энергетику космического аппарата не только при управлении движением вокруг центра масс, но и при управлении движением самого центра масс.
Изобретение позволяет:
1. В технически обоснованных случаях исключать из состава космического аппарата привода и системы управления поворотом солнечных батарей, уменьшая общую массу КА и создавая условия для прецизионной ориентации осей связанной системы координат космического аппарата в пространстве.
2. Во время полета обеспечивать условия для максимального использования солнечной энергии космическим аппаратом с жестко закрепленными на корпусе солнечными батареями.
3. В случае установки на КА аппаратуры, которой при работе необходимы низкие температуры, создавать условия для ее естественного захолаживания за счет постоянного затенения солнечными батареями, экономя электроэнергию КА на ее искусственное захолаживание.
4. Корректировать параметры орбиты (апогей, перигей) космического аппарата в солнечно-орбитальной системе координат без использования других систем координат, экономя энергетику КА, как на переориентацию осей связанной системы координат космического аппарата, так и на выдачу самого корректирующего импульса.
5. В случае необходимости переориентировать оси связанной системы координат космического аппарата из солнечно-орбитальной системы координат в любую известную систему координат, используя минимальное количество разворотов (не более двух) вокруг осей связанной системы координат космического аппарата и экономя энергетику КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2396189C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ СОБСТВЕННОГО ВРАЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЕГО ЦЕНТРА МАСС | 2009 |
|
RU2396188C1 |
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2414392C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2680356C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными | 2015 |
|
RU2613097C1 |
| Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата | 2018 |
|
RU2724216C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
Изобретение относится к управлению движением космического аппарата (КА) вокруг его центра масс. Способ заключается в том, что оси связанной системы координат КА (XKA, YKA, ZKA) совмещают с осями солнечно-орбитальной системы координат (ХСОСК, YCOCK, ZCOCK). При этом ось YCOCK направлена на Солнце, а совмещаемая с ней ось YKA перпендикулярна к рабочей поверхности солнечных батарей КА. Оси ХСОСК и XKA лежат в плоскости орбиты КА и характеризуют общее (на определенном полувитке орбиты) направление движения КА. Ось ZCOCK дополняет систему осей координат до правой прямоугольной. Солнечно-орбитальная система координат является квазиинерциальной по отношению к Солнцу. Ось YCOCK задается на борту КА датчиком направления на Солнце. Линейная скорость движения КА и плоскость его орбиты определяются известными методами и средствами. Техническим результатом изобретения являются обеспечение условий для максимального использования КА солнечной энергии, а также снижение энергозатрат для переориентации осей связанной системы координат КА в другие системы координат (напр., орбитальную). 4 ил.
Способ ориентации в пространстве осей связанной системы координат космического аппарата (КА): ХKA, YKA, ZKA, заключающийся в том, что эти оси совмещают с осями солнечно-орбитальной системы координат: ХСОСК, YCOCK, ZCOCK, в которой для орбит полета к планетам Солнечной системы:
ось ХСОСК лежит в плоскости орбиты КА и направлена в сторону линейного движения КА по орбите,
ось YCOCK направлена на Солнце,
ось ZCOCK дополняет оси ХСОСК и YCOCK до правой прямоугольной системы координат, квазиинерциальной по отношению к Солнцу,
а для околоземных орбит:
ось ХCOCK лежит в плоскости орбиты КА и одна часть витка, начиная от точки орбиты над экватором Земли, через которую проходит направленная в надир отвесная линия, направлена в сторону линейного движения КА по орбите, а другая часть витка, начиная из точки орбиты над экватором Земли, через которую проходит отвесная линия, направленная в зенит, направлена в противоположную сторону,
ось YCOCK направлена на Солнце,
ось ZCOCK дополняет оси ХCOCK и YCOCK до правой прямоугольной системы координат, квазиинерциальной по отношению к Солнцу.
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| US 6142422 A, 07.11.2000 | |||
| US 4759517 A, 26.07.1988 | |||
| Космический аппарат с пассивной системой ориентации и стабилизации | 1988 |
|
SU1655842A1 |

