Область техники, к которой относится изобретение
Настоящее изобретение относится к системам помощи водителю и технологиям активной безопасности для транспортных средств, в частности к узлу датчика угла сцепки, который может использоваться вместе с системой помощи при движении задним ходом с прицепом.
Уровень техники
Для большинства водителей управление транспортным средством с прицепом при движении задним ходом является очень сложной задачей. В частности, это относится к водителям, не имеющим опыта управления транспортным средством с прицепом при движении задним ходом, например при редком вождении транспортного средства с прицепом (при аренде прицепа, редком использовании собственного прицепа и т.д.). Во-первых, эти сложности возникают из-за того, что при движении задним ходом на транспортных средствах с прицепом необходимо поворачивать руль в сторону, противоположную направлению поворота руля при движении задним ходом на транспортном средстве без прицепа, и/или из-за необходимости использования тормозов для стабилизации транспортного средства с прицепом до того, как произойдет складывание сцепки. Второй причиной является то, что небольшие ошибки рулевого управления транспортным средством с прицепом при движении задним ходом усиливаются, в результате чего прицеп значительно отклоняется от желаемой траектории.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения узел датчика угла сцепки включает в себя разделитель, который выполнен с возможностью фиксации между шаром сцепного устройства и установочной поверхностью на транспортном средстве. С разделителем соединен компонент с возможностью поворота вокруг оси шара сцепного устройства. Этот компонент прикреплен к прицепу с помощью соединительного элемента. С разделителем соединен датчик приближения, который воспринимает перемещение указанного компонента для определения угла сцепки.
В соответствии с другим аспектом настоящего изобретения узел датчика угла сцепки включает в себя корпус, неподвижно соединенный с шаром сцепного устройства и компонентом, прикрепленным к прицепу. Компонент может поворачиваться относительно корпуса вокруг вертикальной оси шара сцепного устройства и имеет магнитную часть, форма которой изменяется в радиальном направлении относительно вертикальной оси. Для восприятия магнитной части, чтобы определить угол сцепки, с корпусом соединен датчик Холла.
В соответствии с еще одним аспектом настоящего изобретения узел датчика угла сцепки для прицепа, присоединенного к транспортному средству, включает в себя разделитель, зафиксированный между шаром сцепного устройства и установочной поверхностью на транспортном средстве. С разделителем соединен компонент с возможностью поворота вокруг вертикальной оси шара сцепного устройства. Этот компонент прикреплен к прицепу с помощью соединительного элемента. С компонентом соединен магнит, имеющий дугообразную форму и образующий промежуток до вертикальной оси, который увеличивается между его противоположными концами. Для определения величины поворота компонента с разделителем соединен датчик Холла, который воспринимает положение магнита.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На чертежах представлено следующее.
На Фиг. 1 представлена схема транспортного средства с прицепом, где транспортное средство выполнено с возможностью использования системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом.
На Фиг. 2 представлено схематическое изображение кинематической модели, которая позволяет получить информацию, используемую во время работы системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом осуществления.
На Фиг. 3 представлен общий вид сзади транспортного средства и прицепа, имеющего узел датчика угла сцепки, согласно одному варианту осуществления.
На Фиг. 4 представлен увеличенный общий вид области IV с Фиг. 3, на котором показан один вариант осуществления узла датчика угла сцепки, установленного между транспортным средством и прицепом.
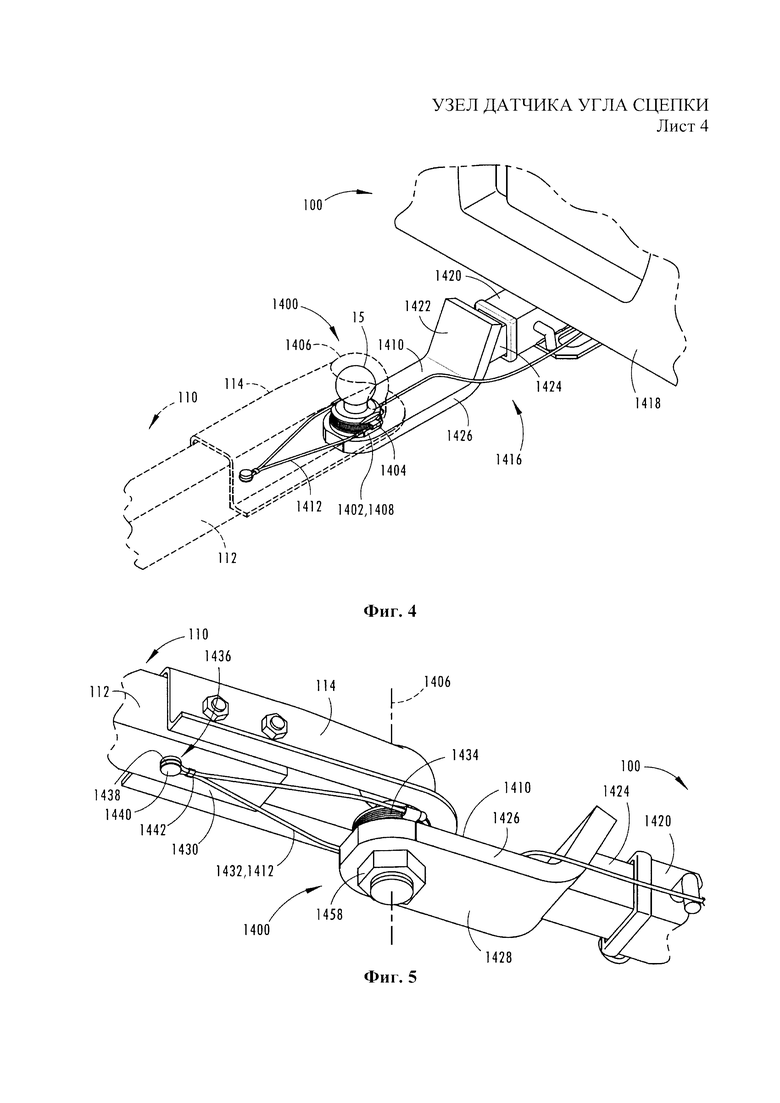
На Фиг. 5 представлен общий вид снизу узла датчика угла сцепки, изображенного на Фиг. 4.
На Фиг. 6 представлен общий вид сверху узла датчика угла сцепки с Фиг. 4.
На Фиг. 7 представлен общий вид сверху узла датчика угла сцепки с Фиг. 4 в разобранном виде.
На Фиг. 8 представлен вид сверху узла датчика угла сцепки, на котором показано транспортное средство и прицеп, выровненные вдоль прямой линии, согласно одному варианту осуществления.
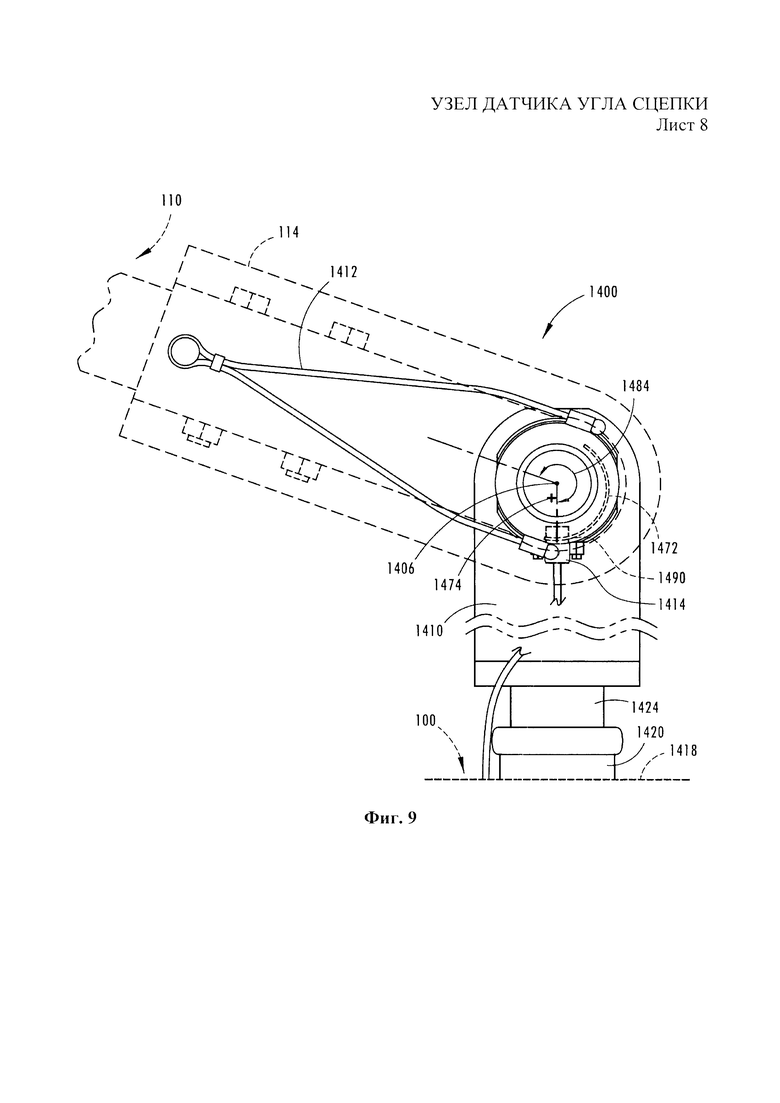
На Фиг. 9 представлен вид сверху узла датчика угла сцепки, на котором показан прицеп, расположенный под первым углом сцепки, согласно одному варианту осуществления.
На Фиг. 10 представлен вид сверху узла датчика угла сцепки, на котором показан прицеп, расположенный под вторым углом сцепки, согласно одному варианту осуществления.
Осуществление изобретения
Хотя в настоящем документе различные аспекты изобретения рассмотрены со ссылкой на конкретные варианты осуществления, сущность изобретения не ограничивается этими вариантами, в связи с чем возможно выполнение модификаций, изменение вариантов использования и осуществления без выхода за рамки сущности изобретения. На сопроводительных чертежах одинаковыми ссылочными позициями обозначены аналогичные компоненты. Специалистам в данной области техники понятно, что различные компоненты, рассмотренные в настоящем документе, могут быть изменены без выхода за рамки сущности изобретения.
Настоящее изобретение направлено на предоставление функционала помощи при движении задним ходом с прицепом, в такой форме, чтобы стоимость была относительно низкой, а пользовательский интерфейс интуитивно понятным. В частности, предлагаемый функционал помощи при движении задним ходом с прицепом позволяет контролировать кривизну траектории движения прицепа, присоединенного к транспортному средству (т.е. контроля кривизны траектории движения прицепа), за счет того, что он позволяет водителю транспортного средства указать желаемую траекторию прицепа путем ввода предпочтительного значения кривизны его траектории, когда транспортное средство движется задним ходом, а прицеп продолжает его движение. Хотя для контроля кривизны траектории движения прицепа можно использовать ручку управления, группу виртуальных кнопок или сенсорный экран, настоящее изобретение не ограничивается конкретной конфигурацией интерфейса, с помощью которого будет вводиться предпочтительное значение кривизны траектории движения прицепа. Кроме того, в тех случаях, где рулевое колесо может быть механически отсоединено от управляемых колес транспортного средства, оно также может быть использовано в качестве интерфейса для введения предпочтительного значения кривизны траектории прицепа. Как будет подробно обсуждаться ниже, кинематическая информация системы, образованной транспортным средством и прицепом, используется для расчета взаимосвязи (т.е. кинематики) между кривизной прицепа и углом поворота транспортного средства для определения изменений угла поворота транспортного средства с целью обеспечить движение прицепа по определенной траектории. Команды рулевого управления, соответствующие необходимому изменению угла поворота, используются для управления системой рулевого управления буксирующего транспортного средства (например, системой рулевого управления с электроусилителем (EPAS)) для реализации таких изменений угла поворота управляемых колес транспортного средства, которые позволят гарантировать движение прицепа по определенной траектории (например, приблизиться к данной траектории). Система помощи при движении задним ходом с прицепом автоматически направляет комбинацию транспортного средства и прицепа, когда водитель использует коробку передач, педаль газа и педаль тормоза транспортного средства так, чтобы направить транспортное средство задним ходом. Водитель вводит команду о предпочтительной кривизне траектории прицепа, используя устройство ввода, такое как ручку для руления прицепом.
В соответствии с некоторыми вариантами реализации системы помощи при движении задним ходом с прицепом предпочтительным может быть использование информации, характеризующей угол сцепки между транспортным средством и прицепом, присоединенным к данному транспортному средству. Настоящее изобретение включает в себя варианты осуществления, позволяющие оценить фактический угол сцепки прицепа, присоединенного к транспортному средству. Использование неточного значения угла сцепки может стать причиной неправильного или некорректного управления системой транспортного средства, особенно в том случае, когда информация об угле сцепки является важной для управления какой-либо системой транспортного средства, например системой помощи при движении задним ходом с прицепом или контроллером тормозов прицепа. В соответствии с одним вариантом осуществления узел датчика угла сцепки включает в себя разделитель, неподвижно установленный между шаром сцепного устройства и установочной поверхностью на транспортном средстве. Узел датчика угла сцепки также имеет компонент, соединенный с разделителем с возможностью поворота вокруг вертикальной оси шара сцепного устройства. Этот компонент прикреплен к прицепу с помощью соединительного элемента. С компонентом соединен магнит, который имеет дугообразную форму с промежутком до вертикальной оси, который увеличивается между его противоположными концами. С разделителем соединен датчик Холла, который воспринимает магнит для определения величины поворота компонента, таким образом определяя угол сцепки. Эти и другие варианты выполнения узла датчика угла сцепки могут быть использованы отдельно или вместе с другими датчиками или системами определения угла сцепки для оценки угла сцепки между транспортным средством и прицепом, что может быть эффективно использовано во время работы системы помощи при движении транспортного средства задним ходом с прицепом.
На Фиг. 1 изображена схема транспортного средства 100, выполненного с возможностью реализации функционала помощи при движении задним ходом с прицепом. Система 105 помощи при движении задним ходом с прицепом, используемая в транспортном средстве 100, управляет кривизной траектории движения прицепа 110, присоединенного к транспортному средству 100. Подобное управление выполняется за счет взаимодействия системы 115 усилителя руля транспортного средства 100 и системы 105 помощи при движении задним ходом с прицепом. При работе системы 105 во время движения транспортного средства 100 задним ходом водитель иногда ограничен в способах подачи команд руления с помощью рулевого колеса транспортного средства 100. Для подачи команд на изменение кривизны траектории движения прицепа 110 может быть использован человеко-машинный интерфейс (HMI) системы 105 помощи при движении задним ходом с прицепом, например ручка, за счет чего такие команды могут вводиться независимо от рулевого колеса транспортного средства 100. В одном варианте, представленном на Фиг. 1, система 105 помощи при движении задним ходом с прицепом включает в себя блок 120 управления системой помощи при движении задним ходом с прицепом, устройство 125 руления прицепом при движении задним ходом и устройство 130 определения угла сцепки. Блок 120 управления системой помощи при движении задним ходом с прицепом соединен с устройством 125 руления прицепом при движении задним ходом и устройством 130 определения угла сцепки с возможностью передачи данных между ними. Блок 120 управления системой помощи при движении задним ходом с прицепом предназначен для реализации логики (т.е. выполнения инструкций) для приема информации от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Блок 120 управления системой помощи при движении задним ходом с прицепом (например, его алгоритм кривизны траектории движения прицепа) генерирует информацию о рулевом управлении транспортным средством в виде функции зависимости от всех или некоторых данных, полученных от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Затем полученные данные о рулевом управлении транспортным средством предоставляются блоку 135 управления усилителем руля для обеспечения управления транспортным средством 100 системой 115 усиления рулевого управления в соответствии с заданной траекторией движения прицепа 110.
Как показано в варианте осуществления с Фиг. 1, устройство 125 руления прицепом при движении задним ходом предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные, задающие траекторию движения прицепа 110 (т.е. данные о рулении прицепом). Данные о рулении прицепом могут включать в себя данные, относящиеся к запрошенному изменению траектории движения (например, изменению радиуса кривизны траектории движения), и данные, указывающие на необходимость движения прицепа вдоль центральной оси прицепа (т.е. практически вдоль прямой). Устройство 125 руления прицепом при движении задним ходом может включать в себя поворотное устройство управления, позволяющее водителю транспортного средства 100 взаимодействовать с устройством 125 руления прицепом при движении задним ходом и вводить команды прицепу на выполнение желаемых действий (например, команду на выполнение желаемого изменения радиуса траектории движения прицепа и/или команду двигаться по практически прямой траектории, определяемой продольной центральной осью прицепа).
В соответствии с вариантом осуществления с Фиг. 1 устройство 130 определения угла сцепки, которое функционирует совместно с компонентом 155 определения угла сцепки прицепа 110, передает на блок 120 управления системой помощи при движении задним ходом с прицепом данные об угле между транспортным средством 100 и прицепом 110 (т.е. данные об угле сцепки), в частности об угле между центральными продольными осями транспортного средства 100 и прицепа 110. Устройство 130 определения угла сцепки может быть выполнено с возможностью обнаружения условия опасности складывания и/или соответствующей информации (например, когда угол сцепки меньше порогового значения).
Что касается кинематической модели, используемой для расчета взаимосвязи между кривизной траектории движения прицепа и углом поворота транспортного средства, буксирующего прицеп, то для системы помощи при движении задним ходом с прицепом, выполненной в соответствии с некоторыми вариантами осуществления настоящего изобретения, предпочтительным может быть использование кинематической модели низкого порядка. Для получения такой кинематической модели низкого порядка необходимо сделать несколько допущений, касающихся параметров, связанных с системой транспортного средства с прицепом. Примерами таких допущений могут являться, не ограничиваясь этим, движение транспортного средства с прицепом задним ходом с относительно низкой скоростью, пренебрежение проскальзыванием колес транспортного средства и прицепа, пренебрежение боковой податливостью шин транспортного средства, пренебрежение деформацией шин транспортного средства и прицепа, пренебрежение динамикой исполнительного механизма транспортного средства, пренебрежение движением крена или тангажа транспортного средства и прицепа.
Как показано на Фиг. 2, кинематическая модель 300 системы, включающей в себя транспортное средство 302 и прицеп 304, основана на различных параметрах транспортного средства 302 и прицепа 304. Эти параметры кинематической модели включают в себя:
δ: угол поворота управляемых передних колес 306 транспортного средства 302;
α: угол рыскания транспортного средства 302;
β: угол рыскания прицепа 304;
γ: угол сцепки (γ=β-α);
W: колесная база транспортного средства 302;
L: расстояние между точкой 308 сцепки и задней осью 310 транспортного средства 302;
D: расстояние между точкой 308 сцепки и осью 312 прицепа 304 (длина оси 312 может представлять собой эффективное или эквивалентное значение длины оси прицепа с несколькими осями);
r2: радиус кривизны для прицепа 304.
Кинематическая модель 300 с Фиг. 2 выявляет взаимосвязь между радиусом кривизны r2 траектории движения прицепа в средней точке 314 оси 312 прицепа 304, углом поворота δ управляемых колес 306 транспортного средства 302 и углом сцепки γ. Как показано в следующем уравнении, эта взаимосвязь может быть выражена для получения кривизны траектории κ2 движения прицепа таким образом, чтобы при заданном значении γ кривизну κ2 траектории движения прицепа можно было контролировать на основании изменения угла поворота δ (где 

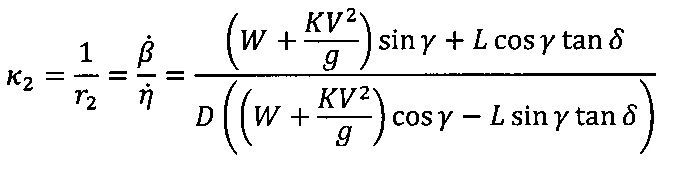
Или же эта взаимосвязь может быть выражена для получения угла поворота δ как функции кривизны κ2 траектории прицепа и угла сцепки γ.

Соответственно, для определенного сочетания транспортного средства и прицепа некоторые параметры кинематической модели (например, D, W и L) являются постоянными и считаются известными. V - продольная скорость транспортного средства, a g - ускорение свободного падения. K - параметр, зависящий от скорости, при этом, когда он равен нулю, расчет угла поворота не зависит от скорости транспортного средства. Например, параметры кинематической модели, зависящие от транспортного средства, могут быть заранее заданы в системе электронного управления транспортного средства, а параметры кинематической модели, зависящие от прицепа, могут быть введены водителем транспортного средства. Кривизна κ2 траектории прицепа определяется из команд водителя, введенных через устройство руления прицепом при движении задним ходом. Используя данное уравнение для определения угла поворота, можно сгенерировать соответствующую команду рулевого управления для управления системой рулевого управления (например, ее исполнительным механизмом) транспортного средства.
Со ссылкой на Фиг. 2, в одном из вариантов осуществления может быть желательным ограничить потенциальную возможность для транспортного средства 302 и прицепа 304 достигать угла складывания (т.е. такого состояния транспортного средства и прицепа, в котором создается условие складывания). Углом складывания γ(j) обозначен угол сцепки γ, который при движении задним ходом не может быть преодолен с помощью максимально возможного поворота руля, например с помощью перемещения управляемых передних колес 306 транспортного средства 302 на максимальный угол δ с максимальной скоростью изменения угла поворота управляемых колес. Угол складывания γ(j) представляет собой функцию максимального угла поворота управляемого колеса 306 транспортного средства 302, колесной базы W транспортного средства 302, расстояния L между точкой сцепки 308 и задней осью 310 транспортного средства 302 и расстояния D между точкой сцепки 308 и эффективной осью 312 прицепа 304, когда прицеп имеет несколько осей. Эффективная ось 312 может представлять собой реальную ось для прицепа с одной осью или эффективное местоположение оси для прицепа с несколькими осями. Когда угол сцепки γ для транспортного средства 302 и прицепа 304 достигает или превышает угол складывания γ(j), транспортное средство 302 должно начать движение вперед для уменьшения угла сцепки γ. Таким образом, для ограничения вероятности достижения транспортным средством с прицепом угла складывания предпочтительно контролировать угол рыскания прицепа и поддерживать угол сцепки транспортного средства с прицепом относительно небольшим.
В соответствии с приведенным описанием желательно использовать информацию, характеризующую угол сцепки между транспортным средством и прицепом, присоединенным к транспортному средству, который также может быть обозначен как фактический угол сцепки γ(а) или угол прицепа. Например, система 105 помощи при движении задним ходом с прицепом и другие подходящие системы транспортного средства могут использовать информацию об угле сцепки в качестве входных данных. В соответствии с предыдущим вариантом осуществления оценочное значение угла сцепки γ может быть определено на основании информации, полученной от одного или нескольких датчиков транспортного средства, одного или нескольких датчиков прицепа, устройства 130 определения угла сцепки транспортного средства 100, компонента 155 определения угла сцепки прицепа 110 или других подходящих сенсорных систем.
На Фиг. 3-9 представлен один вариант выполнения узла 1400 датчика угла сцепки, позволяющего определить угол сцепки γ между прицепом 110 и транспортным средством 100, к которому он присоединен. Узел 1400 датчика угла сцепки включает в себя корпус 1402, зафиксированный на шаре 15 сцепного устройства транспортного средства 100, а компонент 1404, присоединенный к прицепу 110, способен поворачиваться относительно корпуса 1402 вокруг оси 1406 шара 15 сцепного устройства. В соответствии с другим вариантом осуществления узла 1400 датчика угла сцепки корпус 1402 представляет собой разделитель 1408, зафиксированный между шаром 15 сцепного устройства и установочной поверхностью 1410 на транспортном средстве 100. Компонент 1404 может быть соединен с разделителем 1408 с возможностью поворота вокруг оси 1406 шара сцепного устройства 15. Соединительный элемент 1412 может прикреплять компонент 1404 к прицепу 110 для обеспечения поворота компонента 1404 одновременно с угловым перемещением прицепа 110. Датчик приближения 1414, соединенный с разделителем 1408, воспринимает перемещение компонента 1404 для определения угла сцепки. Подразумевается, что в соответствии с другими вариантами осуществления для обеспечения поворота компонента 1404 относительно датчика при угловом перемещении прицепа 110 компонент 1404 может быть прикреплен к прицепу 110 другим образом. Более подробно эти и другие варианты выполнения узла 1400 датчика угла сцепки будут рассмотрены ниже.
Как показано в вариантах осуществления с Фиг. 3-4, транспортное средство 100 имеет сцепное устройство 1416 транспортного средства, которое включает в себя сцепной шар 15, соединенный с установочной поверхностью 1410 на транспортном средстве 100, которая обычно выровнена по центру транспортного средства 100 в его задней части 1426 и находится рядом с брусом 1418 буфера. В соответствии с представленным вариантом осуществления прицеп 110 имеет дышло 112, которое изображено в виде проходящей в продольном направлении балки, с соединительным узлом 114, расположенным на его переднем конце. Для обеспечения шарнирного соединения 117 между транспортным средством 100 и прицепом 110 соединительный узел 114 крепится к сцепному шару 15. Однако следует понимать, что прицеп 110 может иметь и другой соединительный узел 114, а транспортное средство 100 может иметь другое сцепное устройство, например седельно-сцепное устройство, сцепной шар европейского типа или другие конфигурации, подходящие для обеспечения шарнирного соединения 117 между транспортным средством 100 и прицепом 110.
Как также показано на Фиг. 4, транспортное средство 100 имеет приемное устройство 1420 с продольно ориентированным отверстием, в которое вставляется крепление 1422 сцепки. По существу, крепление 1422 сцепки включает в себя соединительный элемент 1424, имеющий в целом квадратное поперечное сечение, который вставляется в отверстие приемного устройства 1420. Задняя часть 1426 крепления 1422 сцепки неразъемно соединена с соединительным элементом 1424 и имеет по существу плоскую установочную поверхность 1410 с примерно горизонтальной ориентацией. В соответствии с дополнительными вариантами осуществления приемное устройство 1420 сцепки может быть выполнено таким образом, чтобы установочная поверхность 1410 располагалась на более высоком или более низком уровне, что обычно называют перепадом сцепки, который является индивидуальным для каждого прицепа 110. Установочная поверхность 1410 крепления 1422 также может иметь форму или изгиб, отличные от изображенных. Кроме того, подразумевается, что установочная поверхность 1410 может иметь нижнюю поверхность 1428 (Фиг. 5) крепления 1422 сцепки, расположенную примерно горизонтально непосредственно на брусе 1418 буфера, или в другом подходящем для буксировки месте на транспортном средстве 100. В соответствии с представленным вариантом осуществления сцепной шар 15 соединен с установочной поверхностью 1410 крепления 1422 рядом с задним концом крепления 1422.
В соответствии с вариантом осуществления с Фиг. 4 и 5 соединительный элемент 1412 соединен с нижней поверхностью 1430 дышла 112 прицепа 110, на расстоянии в продольном направлении от сцепного шара 15. В соответствии с представленным вариантом осуществления соединительный элемент 1412 содержит шнур 1432, концы 1434 которого соединены с компонентом 1404 датчика угла сцепки на противоположных сторонах сцепного шара 15. Шнур 1432 проходит назад от концов 1434, соединяясь с прицепом 110 в центральной части 1436 шнура 1432. В частности, в соответствии с представленным вариантом, в центральной части 1436 шнура 1432 сформирована петля 1438, которая проходит вокруг цилиндрического магнита 1440, выполненного с возможностью магнитного прикрепления к ферромагнитной части дышла 112 прицепа 110. Петля 1438 шнура закреплена вокруг цилиндрического магнита 1440 с помощью стяжки 1442, соединяющей противоположные части шнура с двух сторон от цилиндрического магнита 1440. Шнур 1432 может быть изготовлен из эластомерного материала, что позволяет прикрепить цилиндрический магнит 1440 к прицепам различных типов в разных местах. Подразумевается, что в качестве альтернативы или дополнения соединительный элемент 1412 может включать в себя в целом неупругие или жесткие элементы, проходящие между компонентом 1404 узла 1400 датчика угла сцепки и прицепом 110.
В варианте осуществления с Фиг. 5 показано, что разделитель 1408 жестко прикреплен между нижней поверхностью 1444 сцепного шара 15 и установочной поверхностью 1410. В частности, в представленном варианте выполнения сцепной шар 15 имеет верхнюю часть 1446 сферической формы («голова»), которая соединена с нижней частью 1448 примерно дискообразной формы («плечи») с помощью промежуточной части 1450, находящейся между ними («шейка»). Промежуточная часть 1450 имеет примерно цилиндрическую форму с центральной осью 1452, которая задает вертикальную ось 1406 сцепного шара 15. По существу, промежуточная часть 1450 расположена на одной оси с нижней частью 1448, а верхняя часть 1446 имеет центральную точку примерно на вертикальной оси 1406. Поверхность дна 1444 сцепного шара 15 задана обращенной вниз поверхностью нижней части 1448, которая стыкуется с установочной поверхностью 1410 крепления 1422 сцепки. В соответствии с представленным вариантом осуществления узла 1400 датчика угла сцепки, разделитель 1408 зафиксирован между поверхностью дна 1444 и установочной поверхностью 1410 таким образом, чтобы верхняя часть 1446 и промежуточная часть 1450 сцепного шара 15 не контактировали с узлом 1400 датчика угла сцепки во время использования транспортного средства 100 и прицепа 110.
На Фиг. 7 показан сцепной шар 15, который имеет резьбовую крепежную область 1454 цилиндрической формы, проходящую вниз от нижней поверхности 1444 в направлении оси промежуточной части 1450 сцепного шара 15. Специалистам в данной области понятно, что резьбовой элемент имеет такие размеры, чтобы проходить сквозь крепежное отверстие 1456 аналогичного размера в креплении 1422 сцепки. В соответствии с представленным изображением крепежное отверстие 1456 в креплении 1422 сцепки имеет примерно цилиндрическую форму и ориентировано вертикально, чтобы проходить между установочной поверхностью 1410 и нижней поверхностью 1428 крепления 1422 сцепки. В соответствии с представленным вариантом для резьбового соединения с резьбовым элементом предусмотрена гайка 1458, которая находится в непосредственном контакте с нижней поверхностью 1428 крепления 1422 сцепки, чтобы обеспечить силу сжатия между поверхностью дна 1444 сцепного шара 15 и установочной поверхностью 1410, для повышения эффективности надежного и фиксированного соединения разделителя 1408 между сцепным шаром 15 и креплением 1422 сцепки.
Как показано на Фиг. 7, разделитель 1408 имеет изогнутый канал 1460 вокруг оси 1406 сцепного шара 15 в примерно горизонтальной плоскости, параллельной установочной поверхности 1410. В соответствии с представленным вариантом осуществления изогнутый канал 1460 сформирован вокруг верхней части 1462 разделителя 1408, чтобы обеспечить достаточную высоту нижней части 1464 разделителя 1408 для размещения в ней датчика приближения 1414. Также, в соответствии с представленным вариантом осуществления, для выравнивания относительно крепежного отверстия 1456 в креплении 1422 сцепки через верхнюю и нижнюю части вертикально сформировано центральное отверстие 1466. Для противодействия нагрузке и силам сжатия, возникающим между сцепным шаром 15 и установочными поверхностями 1410, вдоль внутренней поверхности 1470 центрального отверстия 1466 между верхней поверхностью разделителя 1408 и нижней поверхностью разделителя 1408 образована вертикальная опорная секция 1468. В частности, вертикальная опорная секция 1468 рядом с верхней частью 1462 имеет толщину стенки и прочность при сжатии, достаточные для противостояния силам, которые возникают между сцепным шаром 15 и установочной поверхностью 1410, что позволяет избежать деформации или коробления разделителя 1408. Разделитель 1408 может быть изготовлен из различных материалов с описанными выше качествами, таким образом, в соответствии с одним вариантом осуществления он может быть изготовлен из металла или металлического сплава, в частности из обработанной стали.
На Фиг. 7 показано, что для эффективной способности компонента 1404 поворачиваться относительно разделителя 1408 вокруг оси 1406 сцепного шара 15 компонент 1404 соединен с возможностью скольжения с каналом в верхней части разделителя 1408. В соответствии с представленным вариантом осуществления компонент 1404 имеет кольцеобразную форму с ушками 1472, выступающими на противоположных боковых сторонах компонента 1404 для зацепления концов 1434 соединительного элемента 1412. Компонент 1404 также может быть изготовлен из разных материалов; однако в соответствии с предпочтительным вариантом компонент 1404 изготавливают из полимерного материала, в частности из пластикового материала с низким коэффициентом трения, за счет чего достигается скользящее вращение по изогнутому каналу 1460 разделителя 1408.
Как показано в варианте осуществления с Фиг. 8, компонент 1404 имеет магнитную часть 1472, с помощью которой датчик приближения 1414 может воспринять положение поворота компонента 1404, которое соответствует углу сцепки между прицепом 110 и транспортным средством 100. В соответствии с представленным вариантом осуществления магнитная часть 1472 имеет дугообразную форму, центральная точка 1474 которой смещена относительно оси 1406 сцепного шара 15, в результате чего дуга имеет различное радиальное расстояние до оси 1406. В частности, дугообразная форма магнитной части 1472 имеет расстояние до оси 1406, которое непрерывно увеличивается от одного конца 1475 магнита до другого конца 1475. Подразумевается, что в соответствии с другими вариантами осуществления дугообразная форма магнитной части 1472 может не иметь круговую форму, чтобы задать центральную точку, но расстояние от магнитной части 1472 до вертикальной оси 1406 по-прежнему должно быть неодинаковым, что обеспечит обратную связь для датчика приближения 1414, характеризующую угол сцепки. Также в соответствии с представленным вариантом осуществления магнитная часть 1472 содержит пластинчатый магнит 1476, имеющий первую сторону 1478, направленную в сторону от вертикальной оси 1406, и вторую сторону 1480, направленную к оси 1406, таким образом, что первая сторона 1478 и вторая сторона 1480 имеют противоположные полярности. В соответствии с одним вариантом осуществления на первой стороне 1478 пластинчатого магнита 1476 расположен южный полюс, направленный от вертикальной оси 1406, а на второй стороне 1480 расположен северный полюс, направленный к вертикальной оси 1406. Подразумевается, что в соответствии с альтернативными вариантами осуществления полярность может быть обращена, а пластинчатый магнит 1476 может состоять из отдельных магнитов, расположенных в виде магнитной сборки Халбаха или других конфигурациях, позволяющих создать магнитное поле, которое будет варьироваться по датчику приближения 1414 при повороте компонента 1404 относительно разделителя 1408.
Соответственно, как показано в варианте осуществления с Фиг. 8, датчик приближения 1414 включает в себя датчик 1482 магнитного поля, в частности линейный датчик Холла, который располагается в плоскости, в целом параллельной горизонтальной плоскости, в которой компонент 1404 поворачивается вокруг разделителя 1408. Однако подразумевается, что датчик 1482 магнитного поля может быть расположен в других местах или ориентациях относительно разделителя 1408, чтобы обеспечить варьируемые и различимые выходные сигналы напряжения при повороте компонента 1404 относительно разделителя 1408.
На Фиг. 7 и 9 показано, что прицеп 110 поворачивается относительно примерно линейного положения, показанного на Фиг. 8, в правостороннюю ориентацию, показанную на Фиг. 9 с первым углом 1484 сцепки, и левостороннюю ориентацию, показанную на Фиг. 10, со вторым углом 1486 сцепки. Как показано на Фиг. 9, соединительный элемент 1412 поворачивает компонент 1404 при изменении угла прицепа 110 относительно транспортного средства 100. После поворота на первый угол 1484 сцепки магнитная часть 1472 компонента 1404 перемещается из положения, в котором она пересекается с центральной областью 1488 датчика 1482 магнитного поля (Фиг. 8), в положение, в котором она пересекается с передней областью 1490 датчика 1482 магнитного поля. В передней области 1490 датчик 1482 магнитного поля выдает меньшее напряжение, чем в центральной области 1488, так что разницу можно измерить и преобразовать в значение первого угла 1484 сцепки, которое достаточно точно соответствует углу сцепки γ между транспортным средством 100 и прицепом 110.
На Фиг. 10 изображен альтернативный вариант, в соответствии с которым при повороте до второго угла 1486 сцепки магнитная часть 1472 компонента 1404 оказывается повернутой и пересекается с датчиком приближения 1414 в задней области 1492. В соответствии с представленным вариантом осуществления линейный датчик Холла выполнен с возможностью воспринимать место пересечения магнитной части 1472 в горизонтальной плоскости датчика Холла. Соответственно, линейный датчик Холла выдает более низкое напряжение в правосторонней ориентации по сравнению с левосторонней ориентацией, соответствующее малому выходному значению, как показано на Фиг. 10, и большее выходное значение, как показано на Фиг. 9, за счет чего контроллер узла 1400 датчика угла сцепки сопоставляет выходное значение, которое больше, чем при линейной ориентации с Фиг. 8, с правосторонней ориентацией прицепа 110, а выходное значение, которое меньше, чем при линейной ориентации, с левосторонней ориентацией прицепа 110. Соответственно, датчик магнитного поля воспринимает силу магнитного поля магнита, которая соответствует положению поворота компонента 1404 относительно корпуса 1402, за счет чего положение поворота используется для определения угла сцепки γ между прицепом 110 и транспортным средством 100. Также следует понимать, что в соответствии с дополнительными вариантами осуществления узла 1400 датчика угла сцепки, датчик приближения 1414 может включать в себя потенциометр, емкостный датчик, индуктивный датчик или другой подходящий датчик, известный из уровня техники.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения и что подобные концепции определены следующей формулой изобретения, если явно не указано иное.







Группа изобретений относится к системам помощи водителю и технологиям активной безопасности для транспортных средств, в частности к узлу датчика угла сцепки, который может использоваться вместе с системой помощи при движении задним ходом с прицепом. Узел датчика угла сцепки содержит разделитель, выполненный с возможностью фиксации между сцепным шаром и установочной поверхностью на транспортном средстве, компонент, имеющий магнитную часть и соединенный с разделителем с возможностью поворота вокруг оси, образованной сцепным шаром, соединительный элемент для прикрепления компонента к прицепу и датчик магнитного поля, соединенный с разделителем и определяющий положение поворота компонента для определения угла сцепки. Магнитная часть имеет дугообразную форму, имеющую по существу постоянную ширину и центральную точку, смещенную относительно указанной оси, образованной сцепным шаром. Достигается повышение точности управления транспортным средством с прицепом при движении задним ходом. 3 н. и 16 з.п. ф-лы, 10 ил.
1. Узел датчика угла сцепки, содержащий:
разделитель, выполненный с возможностью фиксации между сцепным шаром и установочной поверхностью на транспортном средстве;
компонент, имеющий магнитную часть и соединенный с разделителем с возможностью поворота вокруг оси, образованной сцепным шаром, причем магнитная часть имеет дугообразную форму, имеющую по существу постоянную ширину и центральную точку, смещенную относительно указанной оси, образованной сцепным шаром;
соединительный элемент для прикрепления компонента к прицепу; и
датчик магнитного поля, соединенный с разделителем и определяющий положение поворота компонента для определения угла сцепки.
2. Узел по п. 1, в котором датчик магнитного поля представляет собой линейный датчик Холла, а поворот компонента приводит к перемещению магнитной части относительно датчика магнитного поля.
3. Узел по п. 2, в котором в первом положении поворота магнитная часть пересекается с линейным датчиком Холла в первой области, а во втором положении поворота магнитная часть пересекается с линейным датчиком Холла во второй области, находящейся радиально на расстоянии от первой области.
4. Узел по п. 2, в котором компонент установлен в изогнутом канале с возможностью скольжения.
5. Узел по п. 1, в котором разделитель содержит изогнутый канал вокруг оси в по существу горизонтальной плоскости.
6. Узел по п. 1, в котором соединительный элемент представляет собой шнур, концы которого соединены с компонентом на противоположных сторонах от сцепного шара, а центральная часть соединена с дышлом прицепа.
7. Узел по п. 1, в котором разделитель имеет верхнюю поверхность, контактирующую с нижней поверхностью сцепного шара, причем вниз от нижней поверхности сцепного шара сквозь установочную поверхность проходит резьбовой крепежный стержень.
8. Узел по п. 7, в котором компонент выполнен с возможностью вращения вокруг резьбовой крепежной детали в по существу горизонтальной плоскости между верхней поверхностью и поверхностью установки.
9. Узел датчика угла сцепки, содержащий:
корпус, прикрепленный к сцепному шару;
компонент, прикрепленный к прицепу и выполненный с возможностью поворота относительно корпуса вокруг вертикальной оси сцепного шара, причем компонент имеет магнитную часть с дугообразной формой по существу постоянной ширины, смещенной относительно указанной вертикальной оси, которая имеет различное расстояние в радиальном направлении от вертикальной оси; и
датчик Холла для восприятия магнитной части с целью определения угла сцепки.
10. Узел по п. 9, в котором датчик Холла представляет собой линейный датчик Холла, а поворот компонента приводит к линейному перемещению магнитной части относительно датчика Холла.
11. Узел по п. 9, в котором датчик Холла определяет силу магнитного поля магнитной части, которая соответствует положению поворота компонента относительно корпуса, причем положение поворота используется для определения угла сцепки.
12. Узел по п. 11, в котором магнитная часть представляет собой пластинчатый магнит, первая сторона которого направлена в целом от вертикальной оси, а вторая сторона направлена в целом к вертикальной оси и имеет полярность, противоположную полярности первой стороны.
13. Узел по п. 12, в котором пластинчатый магнит имеет дугообразную форму с центральной осью, смещенной относительно вертикальной оси таким образом, что, когда компонент находится в первом положении поворота, пластинчатый магнит пересекается с датчиком Холла в первой области, а во втором положении пластинчатый магнит пересекается с датчиком Холла во второй области, находящейся радиально на расстоянии от первой области.
14. Узел по п. 9, в котором корпус расположен вокруг вертикальной оси и зафиксирован между нижней поверхностью сцепного шара и установочной поверхностью транспортного средства.
15. Узел по п. 9, в котором корпус имеет изогнутый канал вокруг вертикальной оси в практически горизонтальной плоскости, причем компонент установлен в изогнутом канале с возможностью скольжения.
16. Узел по п. 9, дополнительно содержащий соединительный элемент, концы которого соединены с компонентом на противоположных сторонах от сцепного шара, а центральная часть выполнена с возможностью соединения с дышлом прицепа.
17. Узел датчика угла сцепки для прицепа, присоединенного к транспортному средству, содержащий:
разделитель, зафиксированный между сцепным шаром и установочной поверхностью на транспортном средстве;
компонент, соединенный с разделителем с возможностью поворота вокруг вертикальной оси, образованной сцепным шаром,
соединительный элемент для прикрепления компонента к прицепу;
магнит, соединенный с компонентом и имеющий дугообразную форму с промежутком до вертикальной оси, который увеличивается между его противоположными концами, причем дугообразная форма имеет по существу постоянную ширину и центральную ось, смещенную относительно вертикальной оси; и
датчик Холла, соединенный с разделителем и воспринимающий магнит с целью определения положения поворота компонента.
18. Узел по п. 17, в котором датчик Холла определяет силу магнитного поля магнита, которая соответствует положению поворота компонента относительно корпуса, причем положение поворота используется для определения угла сцепки между прицепом и транспортным средством.
19. Узел по п. 17, в котором магнит представляет собой пластину, имеющую первую сторону с южным полюсом, направленную в целом от вертикальной оси, и вторую сторону с северным полюсом, направленную в целом к вертикальной оси.
| US 5558350 A, 24.09.1996 | |||
| US 6124709 A, 26.09.2000 | |||
| US 2010207616 A1, 19.08.2010 | |||
| US 2004130441 A1, 08.07.2004. |

