Область техники, к которой относится изобретение
Настоящее изобретение относится к системам помощи водителю и технологиям активной безопасности для транспортных средств, в частности к системе помощи при движении задним ходом с прицепом, которая имеет систему управления, выполненную с возможностью использования с прицепами, присоединяемыми с помощью стандартного шарового сцепного устройства, и с прицепами, присоединяемыми с помощью седельно-сцепного устройства.
Уровень техники
Для большинства водителей управление транспортным средством с прицепом при движении задним ходом является очень сложной задачей. В частности, это относится к водителям, не имеющим опыта управления транспортным средством с прицепом при движении задним ходом, например при редком вождении транспортного средства с прицепом (при аренде прицепа, редком использовании собственного прицепа и т.д.). Во-первых, эти сложности возникают из-за того, что при движении задним ходом на транспортных средствах с прицепом необходимо поворачивать руль в сторону, противоположную направлению поворота руля при движении задним ходом на транспортном средстве без прицепа, и/или из-за необходимости использования тормозов для стабилизации транспортного средства с прицепом до того, как произойдет складывание сцепки. Второй причиной является то, что небольшие ошибки рулевого управления транспортным средством с прицепом при движении задним ходом усиливаются, в результате чего прицеп значительно отклоняется от желаемой траектории.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения система помощи при движении задним ходом с прицепом включает в себя датчик сцепки, определяющий измеренное значение угла сцепки между транспортным средством и прицепом с дышлом. Система помощи при движении задним ходом с прицепом также включает в себя датчик рулевого управления, измеряющий угол поворота транспортного средства. Кроме того, система помощи при движении задним ходом с прицепом включает в себя модуль ввода, который принимает желаемое значение кривизны траектории движения прицепа с дышлом. Также система помощи при движении задним ходом с прицепом включает в себя контроллер, генерирующий команду на угол поворота транспортного средства в виде функции зависимости от измеренного угла сцепки, угла поворота и желаемой кривизны траектории движения.
В соответствии с другим аспектом настоящего изобретения предложена система помощи при движении задним ходом с прицепом, которая включает в себя датчик, определяющий измеренное значение угла сцепки между транспортным средством и прицепом. Система помощи при движении задним ходом с прицепом также включает в себя модуль ввода, который принимает желаемое значение кривизны траектории движения прицепа. Контроллер системы помощи при движении задним ходом с прицепом включает в себя регулятор кривизны траектории движения, который определяет желаемый угол сцепки на основании желаемой кривизны траектории движения и угла поворота транспортного средства. Контроллер системы помощи при движении задним ходом с прицепом также включает в себя регулятор угла сцепки, который генерирует команду рулевого управления на основании желаемого угла сцепки и измеренного угла сцепки.
В соответствии с другим аспектом настоящего изобретения предложен способ управления работой системы помощи при движении задним ходом с прицепом, который предполагает определение измеренного угла сцепки между транспортным средством и прицепом. Способ также предполагает определение угла поворота транспортного средства и прием желаемого значения кривизны траектории прицепа. Способ предполагает определение желаемого угла сцепки на основании желаемой кривизны и угла поворота. Кроме того, способ предполагает генерирование команды рулевого управления транспортного средства с помощью линеаризации обратной связи на основании желаемого угла сцепки и измеренного угла сцепки.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На данных чертежах представлено следующее.
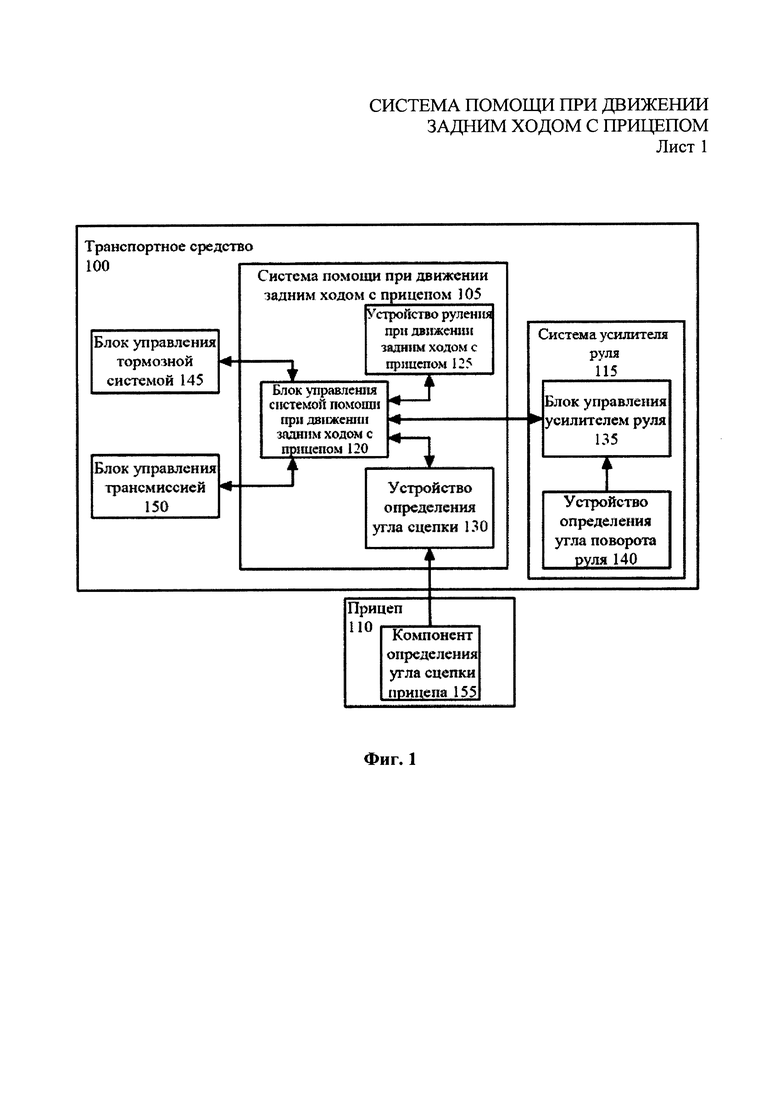
На Фиг. 1 представлена схема транспортного средства с прицепом, где транспортное средство выполнено с возможностью использования системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом.
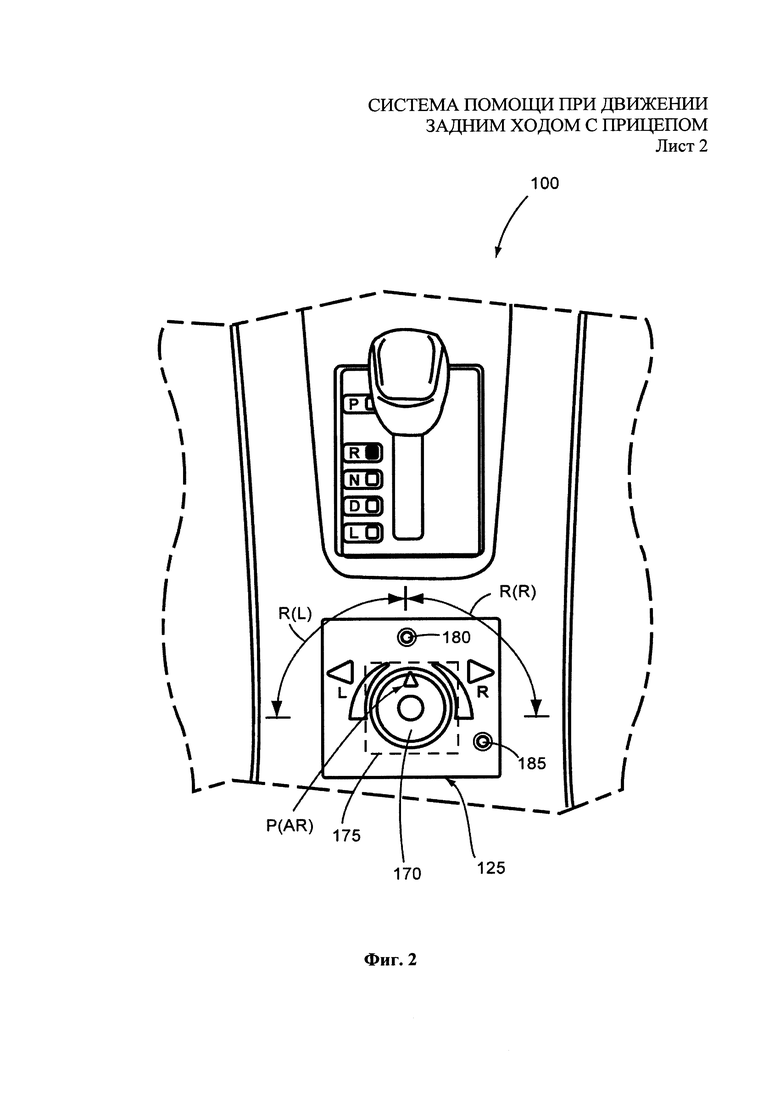
На Фиг. 2 представлен один вариант выполнения устройства руления при движении задним ходом с прицепом, описанного со ссылкой на Фиг. 1.
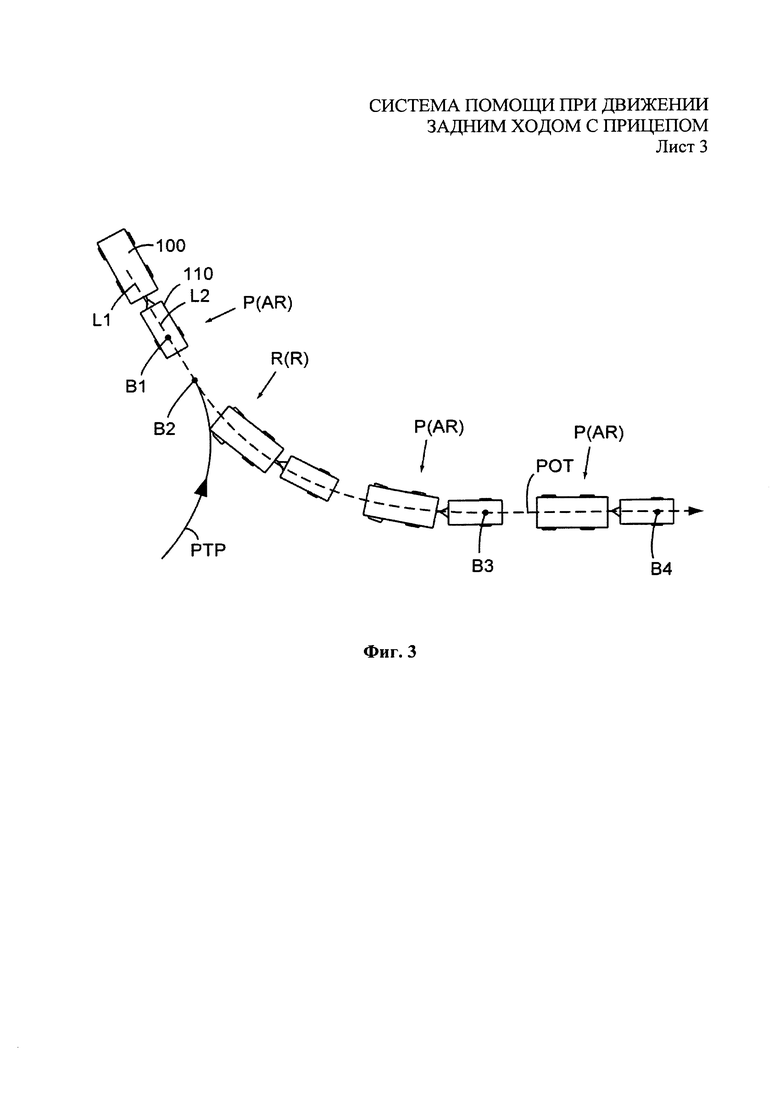
На Фиг. 3 представлен пример последовательности действий, выполняемых при движении задним ходом с прицепом устройством рулевого управления, описанным со ссылкой на Фиг. 2.
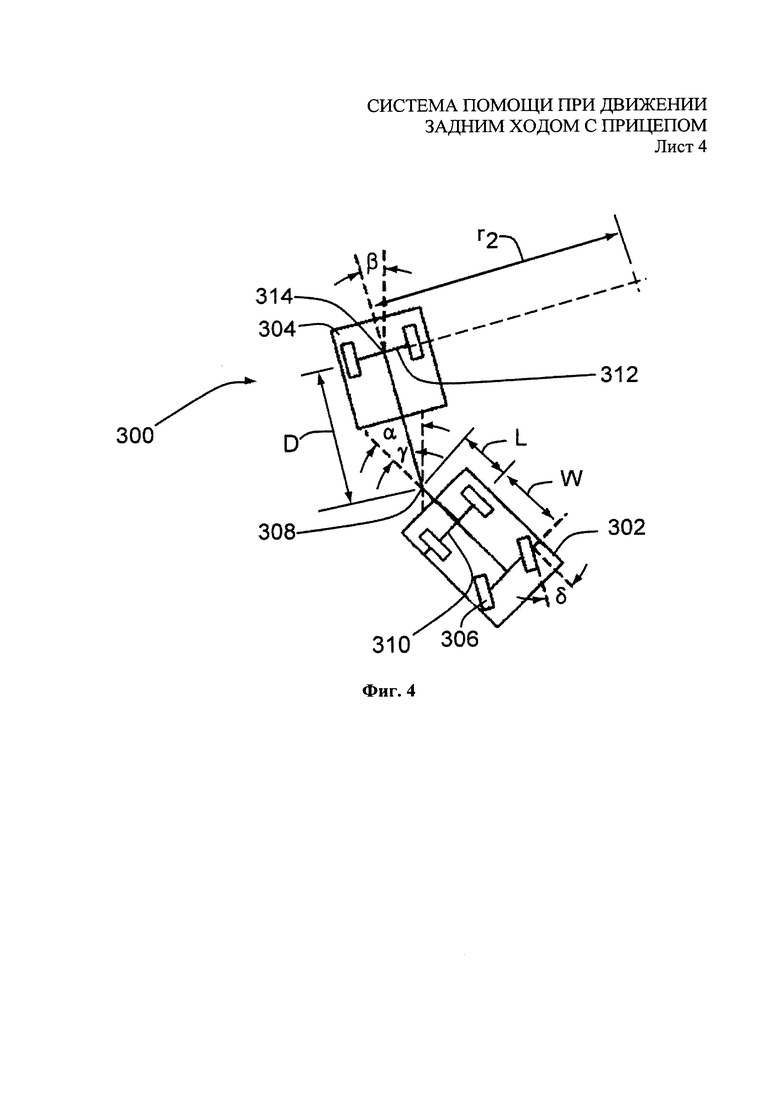
На Фиг. 4 представлено схематическое изображение кинематической модели, которая позволяет получить информацию, используемую во время работы системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом осуществления.
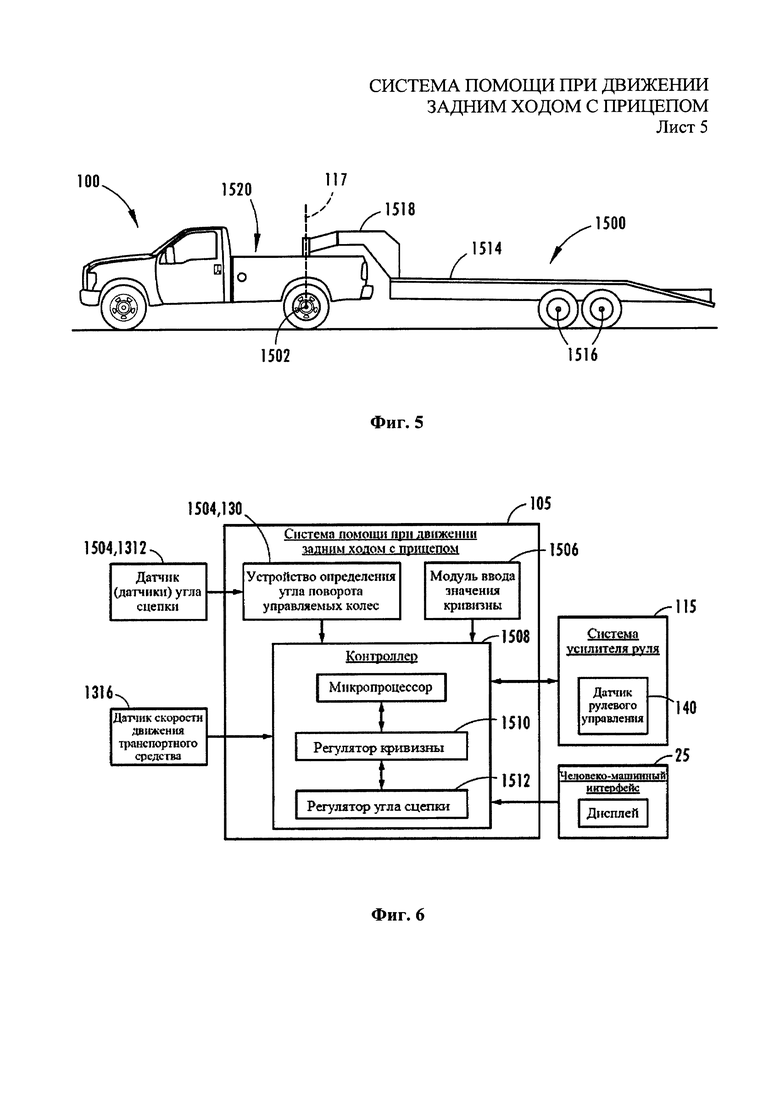
На Фиг. 5 представлена вертикальная проекция на виде сбоку прицепа с дышлом, присоединенного к транспортному средству, в соответствии с одним вариантом осуществления.
На Фиг. 6 представлена схематическая диаграмма одного варианта осуществления системы помощи при движении задним ходом с прицепом, включающей в себя контроллер для генерирования команды рулевого управления.
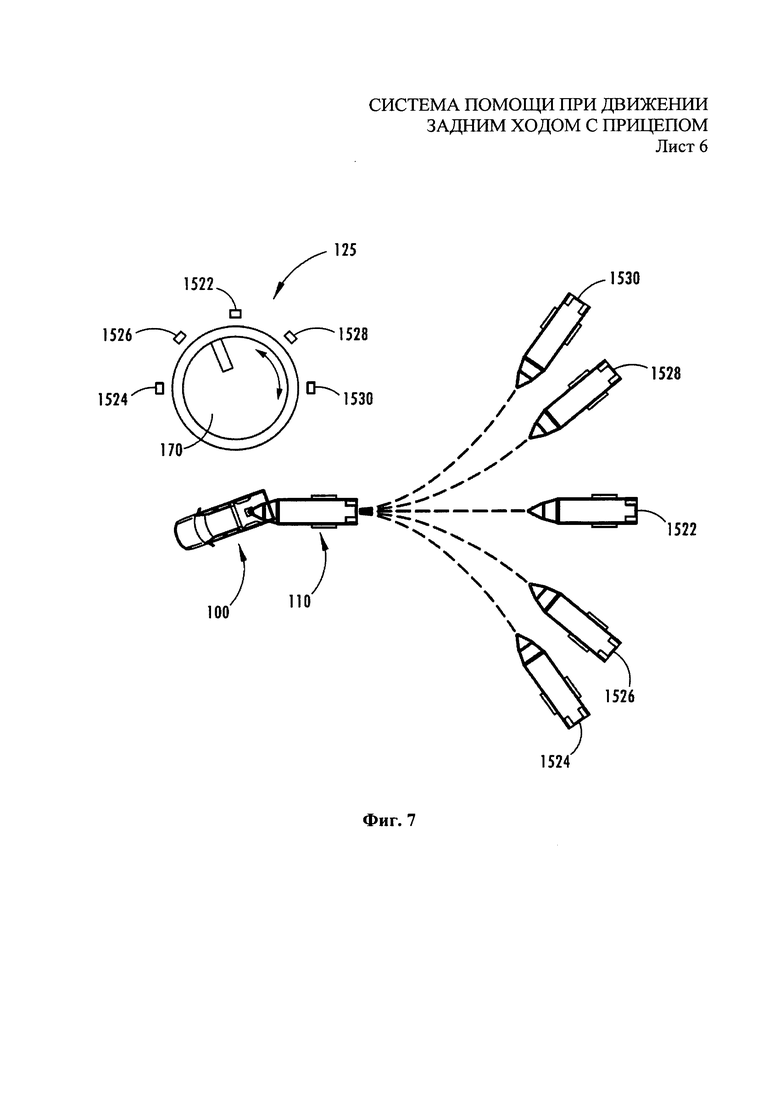
На Фиг. 7 представлено схематическое изображение, на котором показан один вариант осуществления поворотного устройства управления для указания кривизны траектории прицепа и вид сверху транспортного средства и прицепа с различными криволинейными траекториями движения прицепа, коррелирующими с желаемыми значениями кривизны.
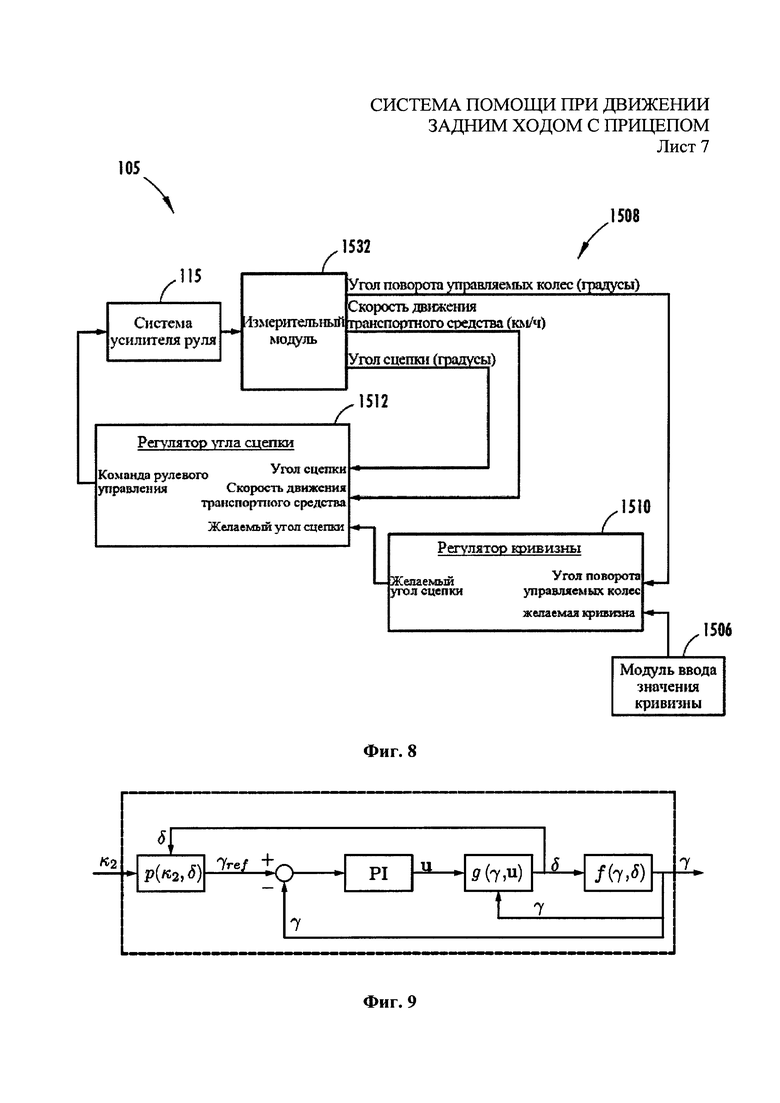
На Фиг. 8 представлено схематическое изображение элементов контроллера с Фиг. 6 и других компонентов системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом осуществления.
На Фиг. 9 представлена схематическая принципиальная схема контроллера с Фиг. 6, на которой изображена архитектура обратной связи и линия передачи сигнала контроллера, в соответствии с одним вариантом осуществления.
На Фиг. 10 представлена блок-схема способа работы системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом осуществления.
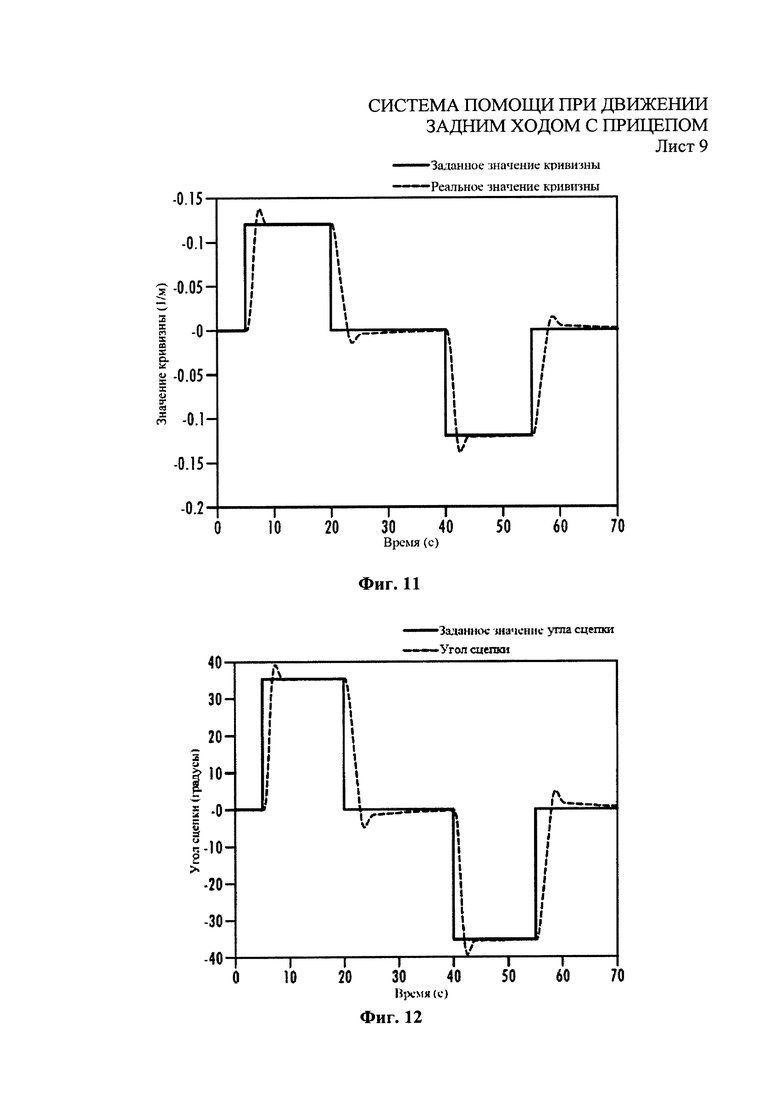
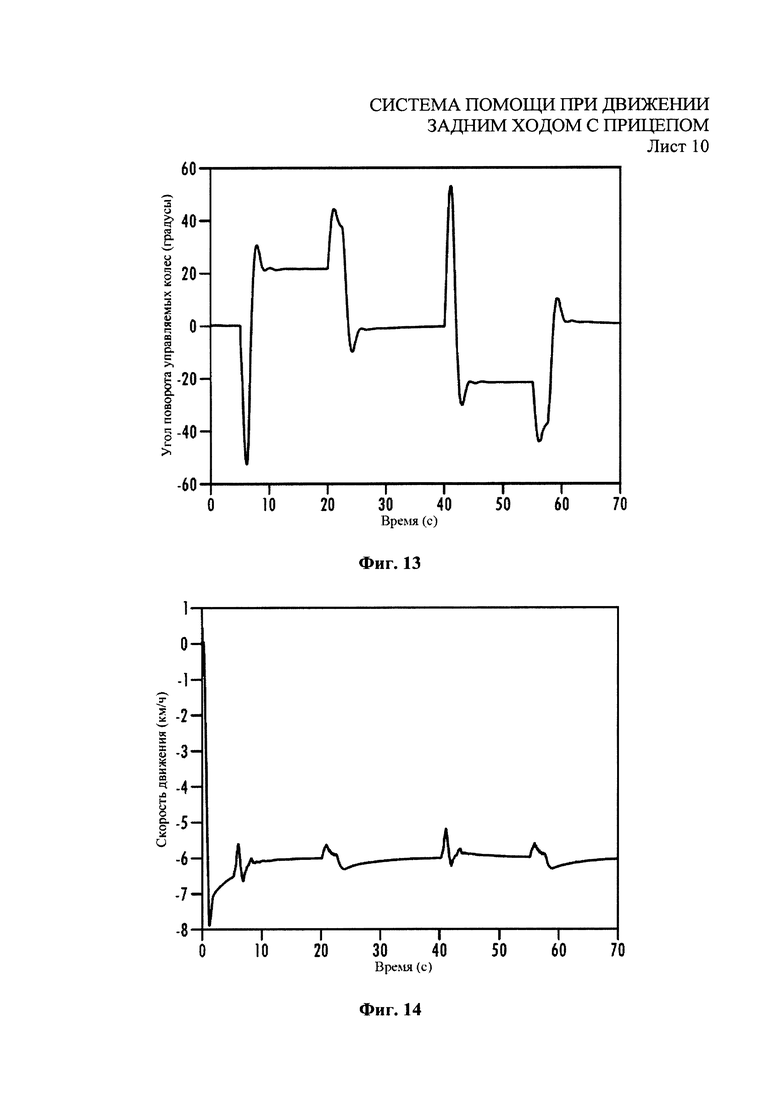
На Фиг. 11-14 представлены графики переменных системы, полученные при моделировании работы системы помощи при движении задним ходом с прицепом с Фиг. 6 с изогнутым дышлом.
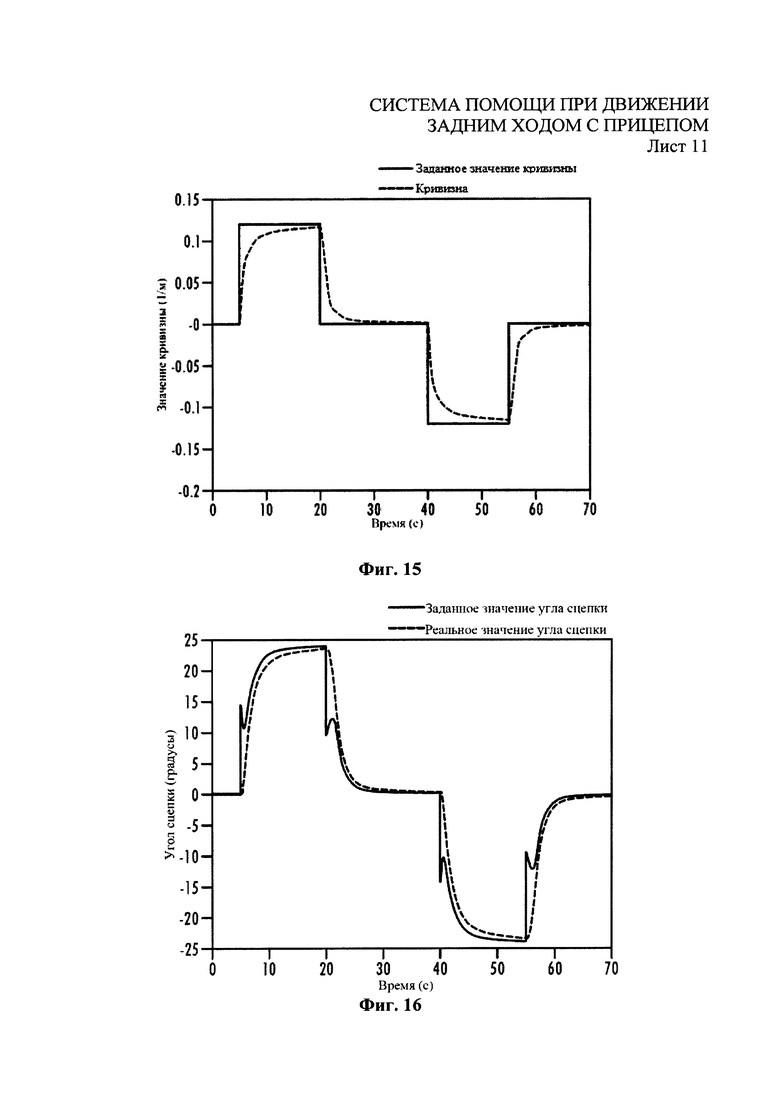
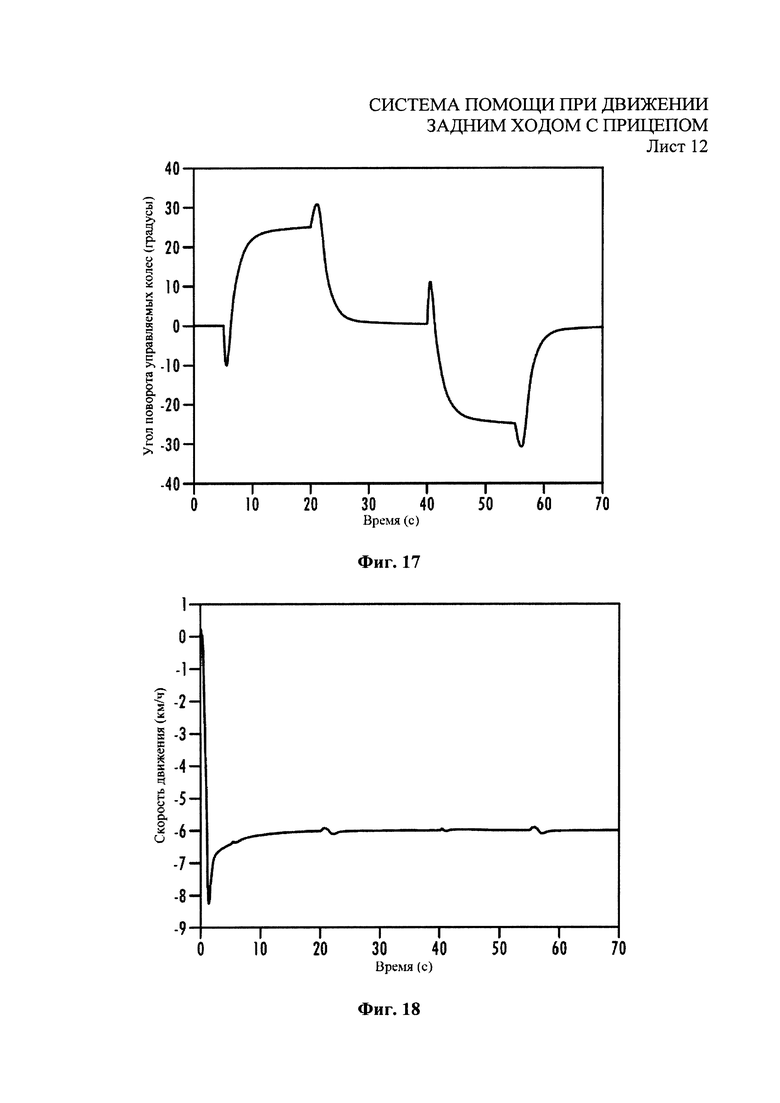
На Фиг. 15-18 представлены графики переменных системы, полученные при моделировании работы системы помощи при движении задним ходом с прицепом с Фиг. 6 со стандартным сцепным устройством.
Осуществление изобретения
Хотя в настоящем документе различные аспекты изобретения рассмотрены со ссылкой на конкретные варианты осуществления, сущность изобретения не ограничивается этими вариантами, в связи с чем возможно выполнение модификаций, изменение вариантов использования и осуществления без выхода за рамки сущности изобретения. На сопроводительных чертежах одинаковыми ссылочными позициями обозначены аналогичные компоненты. Специалистам в данной области техники понятно, что различные компоненты, рассмотренные в настоящем документе, могут быть изменены без выхода за рамки сущности изобретения.
Настоящее изобретение направлено на предоставление функционала помощи при движении задним ходом с прицепом, в такой форме, чтобы стоимость была относительно низкой, а пользовательский интерфейс интуитивно понятным. В частности, предлагаемый функционал помощи при движении задним ходом с прицепом позволяет контролировать кривизну траектории движения прицепа, присоединенного к транспортному средству (т.е. контроля кривизны траектории движения прицепа), за счет того, что он позволяет водителю транспортного средства указать желаемую траекторию прицепа путем ввода предпочтительного значения кривизны его траектории, когда транспортное средство движется задним ходом, а прицеп продолжает его движение. Хотя для контроля кривизны траектории движения прицепа можно использовать ручку управления, группу виртуальных кнопок или сенсорный экран, настоящее изобретение не ограничивается конкретной конфигурацией интерфейса, с помощью которого будет вводиться предпочтительное значение кривизны траектории движения прицепа. Кроме того, в тех случаях, где рулевое колесо может быть механически отсоединено от управляемых колес транспортного средства, оно также может быть использовано в качестве интерфейса для введения предпочтительного значения кривизны траектории прицепа. Как будет подробно обсуждаться ниже, кинематическая информация системы, образованной транспортным средством и прицепом, используется для расчета взаимосвязи (т.е. кинематики) между кривизной прицепа и углом поворота транспортного средства для определения изменений угла поворота транспортного средства с целью обеспечить движение прицепа по определенной траектории. Команды рулевого управления, соответствующие необходимому изменению угла поворота, используются для управления системой рулевого управления буксирующего транспортного средства (например, системой рулевого управления с электроусилителем (EPAS)) для реализации таких изменений угла поворота управляемых колес транспортного средства, которые позволят гарантировать движение прицепа по определенной траектории (например, приблизиться к данной траектории). Система помощи при движении задним ходом с прицепом автоматически направляет комбинацию транспортного средства и прицепа, когда водитель использует коробку передач, педаль газа и педаль тормоза транспортного средства так, чтобы направить транспортное средство задним ходом. Водитель вводит команду о предпочтительной кривизне траектории прицепа, используя устройство ввода, такое как ручку для руления прицепом.
Варианты осуществления объекта изобретения представляют собой систему помощи при движении задним ходом с прицепом, которая выполняет функции пользовательского интерфейса для системы, контролирующей кривизну траектории движения прицепа задним ходом вместе с транспортным средством. В частности, система помощи при движении задним ходом с прицепом, соответствующая вариантам осуществления настоящего изобретения, выполняет функцию контроля кривизны траектории движения прицепа, что позволяет водителю транспортного средства указать желаемую траекторию движения прицепа путем ввода предпочтительного значения кривизны траектории движения прицепа во время управления транспортным средством при движении задним ходом с прицепом. В соответствии с некоторыми вариантами осуществления в ответ на указанную водителем траекторию движения прицепа настоящее изобретение управляет системой усилителя руля (например, системой рулевого управления с электроусилителем (EPAS)) транспортного средства, изменяя угол поворота управляемых колес транспортного средства таким образом, чтобы прицеп двигался по указанной траектории. Кинематика транспортного средства и прицепа используется для определения величины изменения угла поворота управляемых колес, необходимого для движения прицепа по указанной траектории. Соответственно, варианты осуществления настоящего изобретения делают работу системы помощи при движении задним ходом с прицепом относительно простой и позволяют использовать интуитивный пользовательский интерфейс транспортного средства для контроля кривизны траектории движения прицепа.
В соответствии с одним вариантом осуществления система помощи при движении задним ходом с прицепом включает в себя контроллер, выполненный с возможностью управления системой помощи при движении задним ходом с прицепом независимо от прицепа, присоединенного к транспортному средству. В соответствии с данным вариантом осуществления система помощи при движении задним ходом с прицепом включает в себя датчик, определяющий измеренный угол сцепки между транспортным средством и прицепом. Система также включает в себя модуль ввода, который принимает значение кривизны траектории движения прицепа. Контроллер системы включает в себя устройство управления кривизной траектории движения, которое определяет желательное значение угла сцепки на основании предпочтительных значений кривизны траектории движения и угла поворота управляемых колес транспортного средства. Кроме того, контроллер системы включает в себя устройство управления углом сцепки, генерирующее команды рулевого управления на основании предпочтительного значения угла сцепки и измеренного угла сцепки, используя которые команда рулевого управления может корректировать угол поворота управляемых колес в соответствии со значением кривизны траектории движения.
На Фиг. 1 изображена схема транспортного средства 100, выполненного с возможностью реализации функционала помощи при движении задним ходом с прицепом. Система 105 помощи при движении задним ходом с прицепом, используемая в транспортном средстве 100, управляет кривизной траектории движения прицепа 110, присоединенного к транспортному средству 100. Подобное управление выполняется за счет взаимодействия системы 115 усилителя руля транспортного средства 100 и системы 105 помощи при движении задним ходом с прицепом. При работе системы 105 во время движения транспортного средства 100 задним ходом водитель иногда ограничен в способах подачи команд руления с помощью рулевого колеса транспортного средства 100. Это может быть связано с тем, что в некоторых транспортных средствах система 105 помощи при движении задним ходом с прицепом управляется системой 115 усилителя руля, которая напрямую соединена с рулевым колесом (т.е. рулевое колесо транспортного средства 100 поворачивается вместе с управляемыми колесами транспортного средства 100). Как более подробно описано ниже, для подачи команд на изменение кривизны траектории движения прицепа 110 может быть использован человеко-машинный интерфейс (HMI) системы 105 помощи при движении задним ходом с прицепом, например ручка, за счет чего такие команды могут вводиться независимо от рулевого колеса транспортного средства 100.
Система 105 помощи при движении задним ходом с прицепом включает в себя блок 120 управления системой помощи при движении задним ходом с прицепом, устройство 125 руления прицепом при движении задним ходом и устройство 130 определения угла сцепки. В настоящем изобретении раскрыто, что устройство 125 руления прицепом при движении задним ходом может быть соединено с блоком 120 управления системой помощи проводным или беспроводным образом. Блок 120 управления системой помощи при движении задним ходом с прицепом соединен с устройством 125 руления прицепом при движении задним ходом и устройством 130 определения угла сцепки с возможностью передачи данных между ними. Блок 120 управления системой помощи при движении задним ходом с прицепом соединен с блоком 135 управления усилителем руля системы 115 усиления рулевого управления с возможностью передачи данных между ними. Устройство 140 определения угла поворота в системе 115 усиления рулевого управления соединено с блоком 135 управления усилителем руля с возможностью передачи данных между ними. Система помощи при движении задним ходом с прицепом также соединена с блоком 145 управления тормозной системой и блоком 150 управления трансмиссией с возможностью передачи данных между ними. Система 105 помощи при движении задним ходом с прицепом, система 115 усиления рулевого управления, блок 145 управления тормозной системой, блок 150 управления трансмиссией и устройство переключения передач (PRNDL) представляют собой компоненты системы, управляющей движением задним ходом с прицепом в соответствии с одним вариантом осуществления настоящего изобретения.
Блок 120 управления системой помощи при движении задним ходом с прицепом, в варианте, показанном на Фиг. 1, предназначен для реализации логики (т.е. выполнения инструкций) для приема информации от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Блок 120 управления системой помощи при движении задним ходом с прицепом (например, его алгоритм кривизны траектории движения прицепа) генерирует информацию о рулевом управлении транспортным средством в виде функции зависимости от всех или некоторых данных, полученных от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Затем полученные данные о рулевом управлении транспортным средством предоставляются блоку 135 управления усилителем руля для обеспечения управления транспортным средством 100 системой 115 усиления рулевого управления в соответствии с заданной траекторией движения прицепа 110.
Устройство 125 руления прицепом при движении задним ходом предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные, задающие траекторию движения прицепа 110 (т.е. данные о рулении прицепом). Данные о рулении прицепом могут включать в себя данные, относящиеся к запрошенному изменению траектории движения (например, изменению радиуса кривизны траектории движения), и данные, указывающие на необходимость движения прицепа вдоль центральной оси прицепа (т.е. практически вдоль прямой). Как будет более подробно описано ниже, устройство 125 руления прицепом при движении задним ходом может включать в себя поворотное устройство управления, позволяющее водителю транспортного средства 100 взаимодействовать с устройством 125 руления прицепом при движении задним ходом и вводить команды прицепу на выполнение желаемых действий (например, команду на выполнение желаемого изменения радиуса траектории движения прицепа и/или команду двигаться по практически прямой траектории, определяемой продольной центральной осью прицепа). В одном примере поворотное устройство управления может представлять собой ручку, поворачивающуюся вокруг оси, проходящей через верхнюю/лицевую поверхность ручки. В других вариантах поворотное устройство управления может представлять собой ручку, поворачиваемую вокруг оси, проходящей практически параллельно верхней/лицевой поверхности ручки.
Устройство 130 определения угла сцепки в соответствии с вариантом осуществления с Фиг. 1 функционирует совместно с компонентом 155 определения угла сцепки прицепа 110 и передает на блок 120 управления системой помощи при движении задним ходом с прицепом данные об угле между транспортным средством 100 и прицепом 110 (т.е. данные об угле сцепки). В соответствии с одним вариантом осуществления устройство 130 определения угла сцепки представляет собой камеру, например камеру заднего обзора транспортного средства 100, которая захватывает изображения (т.е. визуально отслеживает) метки (т.е. компонента 155 определения угла сцепки), прикрепленной к прицепу 110, во время движения задним ходом транспортного средства 100 с прицепом 110. Компонент 155 определения угла сцепки может быть специально предназначенным для этого компонентом (например, элемент, прикрепленный или встроенный в поверхность прицепа 110 для указанной цели его распознавания устройством 130 определения угла сцепки). В качестве альтернативы устройство 130 определения угла сцепки может представлять собой устройство, которое физически устанавливается на компоненте сцепки транспортного средства 100 и/или на сопряженном компоненте сцепки прицепа 110 и позволяет определить угол между центральными продольными осями транспортного средства 100 и прицепа 110. Устройство 130 определения угла сцепки может быть выполнено с возможностью обнаруживать условие, допускающее складывание, и/или связанную с этим информацию.
В соответствии с вариантом осуществления с Фиг. 1 блок 135 управления усилением рулевого управления в системе, соответствующей варианту осуществления с Фиг. 1, предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные об угловом положении (например, об угле) рулевого колеса и/или угловом положении (например, об угле (углах) поворота) управляемых колес транспортного средства 100. В соответствии с некоторыми вариантами осуществления блок 120 управления системой помощи при движении задним ходом с прицепом может быть интегрированным компонентом системы 115 усиления рулевого управления. Например, блок 135 управления усилителем руля может включать в себя алгоритм помощи при движении задним ходом с прицепом, используемый для генерирования данных о рулевом управлении транспортным средством в виде функции зависимости от всех или некоторых данных, полученных от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией.
Блок 145 управления тормозной системой в соответствии с вариантом осуществления с Фиг. 1 предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные о скорости движения транспортного средства. Данные о скорости движения транспортного средства могут быть определены на основании скорости вращения каждого колеса, наблюдаемой с помощью блока 145 управления тормозной системой, или могут быть предоставлены блоком управления двигателем с проверкой достоверности сигнала. Скорость движения транспортного средства также может быть получена на основании данных от блока управления двигателем. В некоторых случаях значения скоростей вращения каждого колеса могут также быть использованы для определения скоростей рыскания, после чего полученное значение скорости рыскания может быть передано на блок 120 управления для определения данных о рулевом управлении транспортным средством. В соответствии с некоторыми вариантами блок 120 управления системой помощи при движении задним ходом с прицепом может предоставлять блоку 145 управления тормозной системой данные о торможении транспортного средства, на основании которых блок 120 управления системой помощи при движении задним ходом с прицепом сможет управлять тормозами транспортного средства 100 во время движения задним ходом с прицепом 110.
Со ссылкой на вариант осуществления с Фиг. 1, для регулировки скорости и ускорения транспортного средства 100 во время движения задним ходом с прицепом 110 блок 150 управления трансмиссией может обмениваться данными с блоком 120 управления системой помощи при движении задним ходом с прицепом. Как было упомянуто выше, управление скоростью движения транспортного средства 100 может ограничивать вероятность возникновения недопустимого состояния при движении задним ходом с прицепом, например условия складывания и динамического изменения угла движения прицепа.
На Фиг. 2 представлен один вариант осуществления устройства 125 руления прицепом при движении задним ходом, описанного со ссылкой на Фиг. 1. Поворачиваемый элемент управления в форме ручки 170 соединен с устройством 175 определения величины перемещения. Устройство 175 определения перемещения выполнено с возможностью измерения перемещения ручки 170 и выдачи соответствующего сигнала (т.е. сигнала о перемещении) на устройство 125 руления прицепом при движении задним ходом, изображенное на Фиг. 1. Ручка 170 может быть отклонена (например, с помощью возвратной пружины) в дежурное положение P(AR) между противоположными поворотными диапазонами перемещения R(R), R(L). Первый из противоположных поворотных диапазонов R(R) практически равен второму из противоположных поворотных диапазонов перемещения R(L), R(R). Сигнал о перемещении от устройства 175 генерируется как функция от величины поворота ручки 170 относительно дежурного положения P(AR), скорости перемещения ручки 170 и/или направления перемещения ручки 170 относительно дежурного положения P(AR). Для обеспечения тактильной индикации величины поворота ручки 170 сила, с которой ручка 170 смещается в сторону исходного положения P(AR), может увеличиваться (например, нелинейно) в виде функции от величины поворота ручки 170 относительно дежурного положения P(AR). Кроме того, ручка 170 может иметь фиксаторы положений, точно указывающие водителю приближение к дежурному положению P(AR) и позволяющие ощущать крайние положения противоположных диапазонов R(L), R(R) поворота ручки управления траекторией движения (например, с помощью нежестких ограничителей хода). Дежурное положение P(AR) ручки 170 соответствует сигналу от устройства определения величины перемещения, указывающему, что транспортным средством 100 нужно управлять таким образом, чтобы прицеп 110 двигался задним ходом по практически прямой траектории (команда движения прицепа по траектории с нулевой кривизной), соответствующей центральной продольной оси прицепа 110, а крайнее положение по часовой стрелке или против часовой стрелки ручки 170 (т.е. пределы противоположных диапазонов поворота движения R(R), R(L)), каждое, соответствует сигналу от устройства определения перемещения, указывающему на минимальный радиус кривизны (т.е. наиболее крутая траектория) траектории движения прицепа 110, который возможен без того, чтобы соответствующая информация для руления транспортным средством привела к складыванию. В соответствии с настоящим документом соотношение между указанной величиной кривизны траектории движения прицепа (например, радиусом траектории прицепа) и соответствующей величиной поворота ручки может изменяться (например, нелинейно) при перемещении в пределах противоположных диапазонов P(L), P(R) поворота ручки 170 управления траекторией движения. В соответствии с настоящим документом соотношение может зависеть от скорости движения транспортного средства, геометрии прицепа, геометрии транспортного средства, геометрии сцепки и/или нагрузки на прицеп.
Также предполагается, что система по изобретению может быть реализована с таким устройством управления, которое не является поворотным (т.е. неповоротное устройство управления). Аналогично поворотному устройству ввода, выполненному в соответствии с настоящим изобретением (например, ручка 170 и соответствующее устройство определения перемещения), неповоротное устройство ввода выполнено с возможностью выборочного предоставления сигнала, приводящего к движению прицепа по участку траектории, который является по существу прямым, и выборочного предоставления сигнала, приводящего к движению прицепа по участку траектории, который является изогнутым. Примерами таких неповоротных устройств ввода могут являться, не ограничиваясь этим, группа нажимных кнопок (например, кнопка поворота налево, кнопка поворота направо и кнопка движения по прямой), сенсорный экран, с помощью которого водитель может нарисовать или иным образом задать кривизну траектории движения, кнопку, перемещаемую вдоль оси, с помощью которой водитель может ввести команды по траектории движения, или джойстик и т.д.
На Фиг. 2 и 3 представлен пример использования устройства 125 руления прицепом при движении задним ходом для задания кривизны траектории движения (path of travel, РОТ) прицепа (т.е. прицепа 110 с Фиг. 1) при движении транспортного средства (т.е. транспортного средства 100 с Фиг. 1 и 2) задним ходом. Собираясь двигаться задним ходом с прицепом 110, водитель транспортного средства 100 направляет транспортное средство 100 вперед по прямой траектории (pull-thru path, РТР) для установки транспортного средства 100 и прицепа 110 в первое положение В1 для заднего хода. В первом положении В1 для заднего хода транспортное средство 100 и прицеп 110 выровнены вдоль продольной оси таким образом, чтобы продольная центральная ось L1 транспортного средства 100 была выровнена (например, была параллельна или совпадала) с продольной центральной осью L2 прицепа 110. В соответствии с настоящим документом такое выравнивание продольных осей L1, L2 перед задним ходом прицепа не является обязательным с точки зрения системы помощи при движении задним ходом с прицепом, соответствующей настоящему изобретению.
После активации системы 105 помощи при движении задним ходом с прицепом (например, до, после или во время движения вперед по прямой) водитель начинает двигать назад прицеп 110, направляя транспортное средство 100 назад из первого положения В1 заднего хода. Пока ручка 170 устройства 125 руления прицепом при движении задним ходом остается в исходном положении P(AR), система 105 помощи при движении задним ходом с прицепом будет управлять транспортным средством 100, направляя прицеп 110 назад по практически прямой траектории движения, совпадающей с продольной центральной осью L2 прицепа 110 в начале движения прицепа 110 задним ходом. Когда прицеп достигает второго положения В2 заднего хода, водитель поворачивает ручку 170, направляя прицеп 110 вправо (т.е. водитель поворачивает ручку по часовой стрелке в положение R(R)). Соответственно, система 105 помощи при движении задним ходом с прицепом направляет транспортное средство 100 таким образом, чтобы прицеп 110 переместился вправо в соответствии с величиной поворота ручки 170 относительно исходного положения P(AR), скоростью поворота ручки 170 и/или направлением поворота ручки 170 относительно исходного положения P(AR). Аналогичным образом при повороте ручки 170 влево прицеп 110 получит команду движения влево. Когда прицеп достигает положения В3 заднего хода, водитель дает ручке 170 вернуться в исходное положение P(AR), после чего система 105 помощи при движении задним ходом с прицепом начинает управлять транспортным средством 100 таким образом, чтобы прицеп 110 двигался задним ходом по практически прямой траектории, совпадающей с продольной центральной осью L2 прицепа 110, после возврата ручки 170 в исходное положение P(AR). После этого при необходимости система 105 помощи при движении задним ходом с прицепом направляет транспортное средство 100 таким образом, чтобы прицеп 110 двигался назад по практически прямой траектории в четвертое положение В4 заднего хода. В данном случае движение прицепа 110 по криволинейным участкам траектории РОТ управляется поворотом ручки 170, а движение по прямым участкам траектории движения РОТ определяется центральной продольной осью L2 прицепа, когда ручка 170 находится/возвращается в исходное положение P(AR).
Чтобы активировать систему помощи при движении задним ходом с прицепом, описанную выше со ссылкой на Фиг. 1-3, водитель взаимодействует с этой системой, которая, в свою очередь, взаимодействует с окружающей средой транспортного средства. Система помощи при движении задним ходом с прицепом автоматически выполняет рулевое управление при включении водителем передачи заднего хода транспортного средства. Как было сказано выше, водитель управляет траекторией движения прицепа путем ввода желаемой кривизны траектории движения прицепа с помощью ручки управления. Алгоритм помощи при движении задним ходом с прицепом определяет угол поворота управляемых колес транспортного средства для достижения желаемой кривизны траектории движения прицепа, при этом водитель управляет дросселем и тормозами, а система помощи при движении задним ходом с прицепом управляет направлением движения.
Параллельно с приемом сигнала данных о движении прицепа задним ходом выполняются такие операции, как определение данных о рулевом управлении транспортным средством, передача данных о рулевом управлении транспортным средством и определение состояния системы помощи при движении задним ходом с прицепом. При этом для обнаружения недопустимых условий при движении задним ходом с прицепом система помощи выполняет контроль данных о рулевом управлении прицепом. К примерам такого контроля можно отнести, не ограничиваясь этим, оценку угла сцепки для обнаружения превышения порогового значения, оценку скорости движения задним ходом для определения превышения порогового значения, оценку угла поворота управляемых колес транспортного средства для определения превышения порогового значения, оценку других рабочих параметров (например, продольного ускорения транспортного средства, скорости нажатия на педаль газа и скорости изменения угла сцепки) для определения превышения соответствующего порогового значения и т.д. При обнаружении недопустимого состояния при движении прицепа задним ходом может выполняться процедура блокировки продолжения движения по текущей траектории движения прицепа (например, остановка транспортного средства), после чего работа системы помощи завершается. В соответствии с настоящим документом до и/или одновременно с блокировкой движения прицепа по текущей траектории может быть выполнено одно или несколько действий (например, операций) для предоставления водителю сигнала обратной связи (например, предупреждения) о том, что достигнуто или скоро может быть достигнуто недопустимое значение угла сцепки. В соответствии с одним примером, если данный сигнал обратной связи позволяет предотвратить достижение недопустимого угла сцепки, способ может продолжить работу в режиме помощи. В противном случае способ может прекратить выполнение процедуры помощи. Для корректировки или ограничения вероятности возникновения условия складывания вместе с завершением выполнения процедуры помощи может быть выполнена определенная операция управления движением транспортного средства (например, изменение направления движения транспортного средства, замедление транспортного средства, ограничение амплитуды и/или скорости изменения кривизны траектории, запрашиваемой водителем, ограничения амплитуды и/или скорости изменения направления движения и/или аналогичного действия для предотвращения превышения угла сцепки).
Что касается кинематической модели, используемой для расчета взаимосвязи между кривизной траектории движения прицепа и углом поворота транспортного средства, буксирующего прицеп, то для системы помощи при движении задним ходом с прицепом, выполненной в соответствии с некоторыми вариантами осуществления настоящего изобретения, предпочтительным может быть использование кинематической модели низкого порядка. Для получения такой кинематической модели низкого порядка необходимо сделать несколько допущений, касающихся параметров, связанных с системой транспортного средства с прицепом. Примерами таких допущений могут являться, не ограничиваясь этим, движение транспортного средства с прицепом задним ходом с относительно низкой скоростью, пренебрежение проскальзыванием колес транспортного средства и прицепа, пренебрежение боковой податливостью шин транспортного средства, пренебрежение деформацией шин транспортного средства и прицепа, пренебрежение динамикой исполнительного механизма транспортного средства, пренебрежение движением крена или тангажа транспортного средства и прицепа.
Как показано на Фиг. 5, кинематическая модель 300 системы, включающей в себя транспортное средство 302 и прицеп 304, основана на различных параметрах транспортного средства 302 и прицепа 304. Эти параметры кинематической модели включают в себя:
δ: угол поворота управляемых передних колес 306 транспортного средства 302;
α: угол рыскания транспортного средства 302;
β: угол рыскания прицепа 304;
γ: угол сцепки (γ=β-α);
W: колесная база транспортного средства 302;
L: расстояние между точкой 308 сцепки и задней осью 310 транспортного средства 302;
D: расстояние между точкой 308 сцепки и осью 312 прицепа 304 (длина оси 312 может представлять собой эффективное или эквивалентное значение длины оси прицепа с несколькими осями);
r2: радиус кривизны для прицепа 304.
Кинематическая модель 300 с Фиг. 4 выявляет взаимосвязь между радиусом кривизны r2 траектории движения прицепа в средней точке 314 оси 312 прицепа 304, углом поворота δ управляемых колес 306 транспортного средства 302 и углом сцепки γ. Как показано в следующем уравнении, эта взаимосвязь может быть выражена для получения кривизны траектории κ2 движения прицепа таким образом, чтобы при заданном значении γ кривизну κ2 траектории движения прицепа можно быть контролировать на основании изменения угла поворота δ (где  - скорость рыскания прицепа, а
- скорость рыскания прицепа, а  - скорость прицепа).
- скорость прицепа).
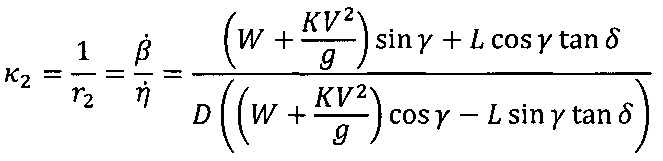
Или же эта взаимосвязь может быть выражена для получения угла поворота δ как функции кривизны κ2 траектории прицепа и угла сцепки γ.

Соответственно, для определенного сочетания транспортного средства и прицепа некоторые параметры кинематической модели (например, D, W и L) являются постоянными и считаются известными. V - продольная скорость транспортного средства, a g - ускорение свободного падения. K - параметр, зависящий от скорости, при этом, когда он равен нулю, расчет угла поворота не зависит от скорости транспортного средства. Кривизна κ2 траектории прицепа определяется из команд водителя, введенных через устройство руления прицепом при движении задним ходом. Используя данное уравнение для определения угла поворота, можно сгенерировать соответствующую команду рулевого управления для управления системой рулевого управления (например, ее исполнительным механизмом) транспортного средства.
Со ссылкой на Фиг. 4, в одном из вариантов осуществления желательно ограничить потенциальную возможность для транспортного средства 302 и прицепа 304 достигать угла складывания (т.е. такого состояния транспортного средства и прицепа, в котором создается условие складывания). Углом складывания γ(j) обозначен угол сцепки γ, который при движении задним ходом не может быть преодолен с помощью максимально возможного поворота руля, например, с помощью перемещения управляемых передних колес 306 транспортного средства 302 на максимальный угол δ с максимальной скоростью изменения угла поворота управляемых колес. Угол складывания γ(j) представляет собой функцию максимального угла поворота управляемого колеса 306 транспортного средства 302, колесной базы W транспортного средства 302, расстояния L между точкой сцепки 308 и задней осью 310 транспортного средства 302 и расстояния D между точкой сцепки 308 и эффективной осью 312 прицепа 304, когда прицеп имеет несколько осей. Эффективная ось 312 может представлять собой реальную ось для прицепа с одной осью или эффективное местоположение оси для прицепа с несколькими осями. Когда угол сцепки γ для транспортного средства 302 и прицепа 304 достигает или превышает угол складывания γ(j), транспортное средство 302 должно начать движение вперед для уменьшения угла сцепки γ.
На Фиг. 4 показано, что предельное значение угла поворота для передних управляемых колес 306 требует, чтобы угол сцепки γ не превышал угол складывания γ(j), также называемый критическим углом сцепки. Таким образом, с учетом того, что угол сцепки γ не может превышать угол складывания γ(j), угол складывания γ(j) представляет собой угол сцепки γ, обеспечивающий движение по кругу для транспортного средства с прицепом, когда управляемые колеса 306 повернуты на максимальный угол δ(max).
В соответствии с настоящим документом система 105 помощи при движении задним ходом с прицепом может быть использована для управления транспортным средством 100, присоединенным к прицепу 110, и контроля кривизны траектории движения прицепа 110 при движении задним ходом. Как было сказано выше, кинематические данные (Фиг. 4) транспортного средства с прицепом используются для вычисления соотношения между кривизной траектории движения прицепа и углом поворота управляемых колес транспортного средства для определения команды об угле поворота транспортного средства и обеспечения движения прицепа по желаемой траектории. В некоторых вариантах осуществления система управления может обеспечивать достижение менее желаемых результатов при использовании со сцепными устройствами прицепов с изогнутым дышлом (типа «гусиная шея»), таких как устройства, использующие для сцепки сцепной шар в платформе грузовика, или с пальцем седельно-сцепного устройства на транспортном средстве.
На Фиг. 5-18 представлена система 105 помощи при движении задним ходом с прицепом, которая может быть выполнена с возможностью функционировать вместе с прицепом 110, имеющим изогнутое дышло, называемым прицепом 1500 с «гусиной шеей», или другими прицепами, имеющими шарнирное соединение 117 с транспортным средством 100, которое находится рядом или на задней оси 1502 транспортного средства 100. В соответствии с одним таким вариантом осуществления система 105 помощи при движении задним ходом с прицепом включает в себя датчик сцепки 1504, который определяет измеренный угол сцепки γ(m) между транспортным средством 100 и прицепом 110. Датчик 140 рулевого управления также может определять угол δ поворота управляемых колес транспортного средства. Также система 105 помощи при движении задним ходом с прицепом может включать в себя модуль 1506 ввода кривизны, который принимает желаемую кривизну κ2 траектории движения прицепа 110. Кроме того, предусмотрен также контроллер 1508, предназначенный для генерирования команды угла поворота транспортного средства в зависимости от измеренного угла сцепки γ(m), угла δ поворота управляемых колес и желаемой кривизны κ2 траектории движения прицепа 1500 с изогнутым дышлом.
В соответствии с одним вариантом осуществления системы 105 помощи при движении задним ходом с прицепом контроллер 1508 может иметь регулятор 1510 кривизны и регулятор 1512 угла сцепки, с помощью которого регулятор 1510 кривизны определяет желаемый угол сцепки γ(d) на основании желаемой кривизны κ2 траектории движения и угла δ поворота управляемых колес. Во время работы регулятора 1510 кривизны регулятор 1512 угла сцепки генерирует команду угла поворота на основании желаемого угла сцепки γ(d), вычисленного с помощью регулятора 1510 кривизны, и измеренного угла сцепки γ(m), определенного с помощью датчика сцепки 1504. В соответствии с дополнительным вариантом выполнения контроллера 1508 может быть сделано допущение о том, что при использовании системы управления кривизной системы 105 помощи при движении задним ходом с прицепом продольное расстояние между шарнирным соединением 117 и задней осью 1502 транспортного средства 100 считается равным нулю, когда прицеп 1500 с изогнутым дышлом или другой аналогичный прицеп соединяется с транспортным средством 100 с помощью седельно-сцепного устройства или шара сцепного устройства. В соответствии с данным допущением шарнирное соединение с прицепом 110 считается практически выровненным относительно задней оси 1502. На основании данного допущения контроллер 108 может генерировать команду рулевого управления транспортного средства 100, не зависящую от расстояния L между шарнирным соединением 117 и задней осью 1502 транспортного средства 100. Эти и другие варианты выполнения контроллера 1508 для системы 105 помощи при движении задним ходом с прицепом будут более подробно описаны ниже.
На Фиг. 5 представлен пример варианта транспортного средства 100 с системой 105 помощи при движении задним ходом с прицепом, соединенной с одним примером прицепа 1500 с изогнутым дышлом. Прицеп 1500 с изогнутым дышлом имеет грузовое пространство 1514 с безбортовой платформой, поддерживаемое парой осей 1516, при этом дышло 1518 проходит вверх от грузового пространства 1514 с безбортовой платформой и вперед в кузов 1520 транспортного средства 100 для создания шарнирного соединения с транспортным средством 100 рядом с задней осью 1502 транспортного средства 100. Кузов транспортного средства может иметь сцепной шар, имеющий шарнирное соединение 117 с соответствующим узлом соединителя на дышле 1518 прицепа 1500 с изогнутым дышлом. В качестве альтернативы кузов 1520 транспортного средства 100 может иметь седельно-сцепное устройство, образующее шарнирное соединение 117 с пальцем на дышле 1518 прицепа 1500 с изогнутым дышлом. В представленном варианте осуществления шарнирное соединение 117 выровнено относительно задней оси 1502 транспортного средства 100, за счет чего продольное расстояние L между задней осью и шарнирным соединением 117 равно нулю. Подразумевается, что в соответствии с дополнительными вариантами осуществления шарнирное соединение 117 может иметь другие соединительные узлы для создания шарнира сцепки, проходящего вдоль практически вертикальной оси, которая выровнена относительно задней оси 1502 транспортного средства 100, при этом данный шарнир может находиться немного спереди или сзади относительно задней оси 1502. Также следует понимать, что прицеп 1500 с изогнутым дышлом описывается в настоящем документе со ссылкой на конфигурацию дышла, имеющего приподнятую часть и обеспечивающего соединение с транспортным средством 100 в месте, которое находится выше задней оси 1502, при этом другие варианты прицепа 1500 с изогнутым дышлом включают в себя закрытые грузовые пространства, жилые прицепы, прицепы для перевозки скота, прицепы для перевозки лошадей, низкорамные прицепы и другие подходящие прицепы с подобной конфигурацией дышла.
На Фиг. 6 представлен один вариант системы 105 помощи при движении задним ходом с прицепом, включающей в себя устройство 130 определения угла сцепки, которое может быть использовано по крайней мере вместе с одним датчиком 1312 угла сцепки для передачи данных об угле сцепки γ между транспортным средством и прицепом на контроллер 1508. Как было сказано выше, устройство 130 определения угла сцепки может включать в себя различные системы, в которые встроен один или несколько датчиков определения физических параметров транспортного средства 100 и/или прицепа 110 и других габаритов и характеристик транспортного средства и прицепа (т.е. кинематических данных) для определения измеренного угла сцепки γ(m) между транспортным средством 100 и прицепом 110. Аналогичным образом датчик 1312 угла сцепки может представлять собой датчики различных типов, включая систему датчиков изображений, систему магнитных датчиков, систему емкостных датчиков, систему индуктивных датчиков и/или другие подходящие датчики. Также датчик сцепки 1504, соответствующий данному варианту осуществления системы 105, представленный на Фиг. 6 и рассмотренный в настоящем разделе, может включать в себя устройство 130 определения угла сцепки и/или датчик 1312 угла сцепки для определения угла сцепки γ между транспортным средством 100 и прицепом 110.
Как показано на Фиг. 6, контроллер 1508 системы помощи при движении задним ходом с прицепом обменивается данными с системой 115 усилителя руля во время работы системы 105 помощи при движении задним ходом с прицепом, описанной в настоящем документе. В частности, устройство 140 определения угла поворота управляемых колес (или датчик рулевого управления) системы 115 усилителя руля может быть использовано для определения угла δ поворота управляемых колес 1302 (Фиг. 4) транспортного средства 100. Система 115 усилителя руля также может принимать команду угла поворота, сгенерированную контроллером 1508 для обеспечения автономного управления транспортным средством 100 или иного изменения угла δ поворота управляемых колес транспортного средства 100. Контроллер 1508 также принимает данные от датчика 1316 скорости движения транспортного средства, который может быть встроен в бортовую сенсорную систему транспортного средства 100 или дополнительное устройство, такое как портативное GPS-устройство или смартфон.
Как показано на Фиг. 6, иллюстративный пример системы 105 помощи при движении задним ходом с прицепом также включает в себя модуль 1506 ввода кривизны для предоставления контроллеру 1508 данных о желаемой или указанной траектории движения прицепа, например для предоставления данных о желаемой кривизне κ2 траектории движения прицепа 110. Желаемая кривизна κ2 может быть равна единице, деленной на радиус r2 (Фиг. 4) желаемой траектории движения назад от прицепа 110, при этом нулевой радиус соответствует примерно прямой траектории движения. Соответственно, данные от модуля 1506 ввода кривизны могут включать в себя данные об указанной величине изменения кривизны κ2 и данные, указывающие на то, что прицеп 110 должен двигаться по траектории, совпадающей с продольной центральной осью прицепа 110 (т.е. по практически прямой траектории движения). В соответствии с одним вариантом осуществления модуль 1506 ввода кривизны может выполнять функции планировщика траектории, генерирующего кривизну κ2 для прицепа, двигаясь по которой можно будет достичь желаемой точки, что более подробно будет описано ниже.
В соответствии с другим вариантом осуществления, изображенным на Фиг. 7, модуль 1506 ввода кривизны включает в себя устройство 125 руления прицепом при движении задним ходом, которое имеет поворотное устройство управления, которое позволяет водителю транспортного средства 100 управлять желаемым направлением движения прицепа. В соответствии с иллюстративным вариантом осуществления поворотное устройство управления представляет собой ручку 170 (Фиг. 2), способную поворачиваться вокруг центральной оси между средним положением 1522, соответствующим примерно прямой траектории движения (определяемой продольной центральной осью прицепа 110), и различными повернутыми положениями 1524, 1526, 1528, 1530 на противоположных сторонах от среднего положения 1522, управляющими кривизной κ2, соответствующей радиусу желаемой траектории движения прицепа 110 в повернутом положении. Также следует понимать, что модуль 1506 ввода кривизны может включать в себя несколько источников данных, таких как планировщик траектории, поворотное устройство управления и устройство перевода в ручной режим или любой другой источник, от которого на контроллер 1508 поступает значение кривизны κ2.
Один вариант осуществления контроллера системы 105 помощи при движении задним ходом с прицепом представлен на Фиг. 8, где показана общая архитектура одного варианта осуществления. В соответствии с представленной схемой модуль 1506 ввода кривизны передает значение кривизны κ2 на регулятор 1510 кривизны контроллера 1508. В соответствии с данным вариантом осуществления контроллера 1508 регулятор 1510 кривизны рассчитывает предпочтительное значение угла сцепки γ(d) на основании текущей желаемой кривизны κ2 и угла δ поворота управляемых колес, значения которых выдаются измерительным модулем 1532. Измерительный модуль 1532 может представлять собой отдельное запоминающее устройство или запоминающее устройство, встроенное в контроллер 1508, где хранятся данные от датчиков системы 105 помощи при движении задним ходом с прицепом, такие как данные от датчика 1504 угла сцепки, датчика 1316 скорости движения транспортного средства, датчика 140 угла поворота, при этом в качестве альтернативы измерительный модуль 1532 может передавать данные от датчиков напрямую без использования запоминающего устройства. Соответственно, измеренное значение угла δ поворота управляемых колес может быть выдано датчиком 140 угла поворота, как показано на Фиг. 6, или может представлять собой значение, полученное на основании функции, использующей другие кинематические данные транспортного средства.
Как показано на Фиг. 8, после вычисления устройством 1510 управления кривизной траектории движения предпочтительного значения угла γ(d) сцепки устройство 1512 управления углом сцепки генерирует команду рулевого управления на основании вычисленного предпочтительного значения угла сцепки γ(d), измеренного угла сцепки γ(m) и текущей скорости движения транспортного средства 100. Команда угла поворота подается в систему 115 усилителя руля транспортного средства 100, которая затем возвращается на измерительный модуль 1532 для повторной оценки изменения других характеристик транспортного средства после применения команды угла поворота или других изменений системы 105. Соответственно, регулятор 1510 кривизны и регулятор 1512 угла сцепки непрерывно обрабатывают данные от измерительного модуля 1532 для выдачи точных команд изменения направления движения для направления прицепа 110 по траектории с кривизной κ2 без значительного выбега или непрерывных колебаний относительно траектории с желательным значением кривизны κ2.
Как показано на Фиг. 9, один вариант осуществления контроллера 1508 представлен в виде принципиальной схемы системы управления. В частности, в систему управления вводится входное значение κ2, представляющее собой желаемую кривизну траектории движения прицепа 110 для регулятора 1510 кривизны. Регулятор кривизны может быть изображен в виде статической карты p(κ2, δ), которая в соответствии с одним вариантом осуществления может быть представлена следующим образом:

где
κ2 - желаемая кривизна траектории движения прицепа или 1/r2, как показано на Фиг. 3-6;
δ - угол поворота управляемых колес;
L - расстояние от задней оси транспортного средства до шарнира сцепки;
D - расстояние от шарнира сцепки до оси прицепа;
W - расстояние от задней оси до передней оси транспортного средства.
Как показано на Фиг. 9, выходное значение угла сцепки для p(κ2, δ) представляет собой опорный сигнал γref для остальной части системы управления, хотя значение угла δ поворота управляемых колес, используемое регулятором 1510 кривизны, представляет собой сигнал обратной связи из нелинейной функции регулятора 1512 угла сцепки. Как показано, регулятор 1512 угла сцепки использует линеаризацию обратной связи для определения закона управления с обратной связью следующим образом:

Как показано на Фиг. 9, закон управления с обратной связью g(u, γ, ν) используется в пропорционально-интегральном (PI) контроллере, что позволяет практически полностью исключить статическую ошибку слежения за счет интегральной составляющей. В частности, система управления с Фиг. 9 может быть представлена в виде следующих дифференциально-алгебраических уравнений:


Подразумевается, что коэффициент усиления пропорционально-интегрального контроллера может зависеть от длины D прицепа, т.е. динамические характеристики прицепов с меньшей длиной будут изменяться быстрее. Более того, регулятор 1512 угла сцепки может быть выполнен с возможностью предотвращения ситуаций, в которых предпочтительное значение угла сцепки γ(d) достигнет или превысит угол складывания γ(j), на основании расчетов контроллера или других способов определения с помощью системы 105 помощи при движении задним ходом с прицепом, что более подробно было рассмотрено выше.
На Фиг. 10 представлен способ работы системы 105 помощи при движении задним ходом с прицепом, соответствующий одному варианту осуществления. Способ включает в себя начальный этап 1534 определения измеренного угла сцепки γ(m) между транспортным средством 100 и прицепом 110. На этапе 1536, выполняемом до, после или во время определения измеренного угла сцепки γ(m), определяют угол δ поворота управляемых колес транспортного средства 100, например, с помощью датчика 140 угла поворота, изображенного на Фиг. 6. После присоединения прицепа 110 и его подготовки к движению задним ходом на этапе 1538 задают кривизну κ2 траектории движения прицепа 110. В соответствии с одним вариантом осуществления при генерировании траектории движения прицепа 110 для определения кривизны κ2 для прицепа 110 может быть использован планировщик траектории. На этапе 1540 на основании желаемой кривизны κ2 и угла δ поворота управляемых колес определяется желаемый угол сцепки γ(d). В соответствии с одним вариантом осуществления на этапе 1542 угол складывания γ(j) может быть определен на основании длины D прицепа 110, что было рассмотрено выше со ссылкой на Фиг. 4, после чего он будет использован для предотвращения возникновения ситуации, когда желаемый угол сцепки γ(d) будет больше угла складывания. Используя линеаризацию обратной связи, на этапе 1544 может быть сгенерирована команда угла поворота для транспортного средства на основании предпочтительного значения угла сцепки γ(d), измеренного угла сцепки γ(m) и скорости движения транспортного средства. На этапе 1544 использования контроллера может быть сгенерирована команда рулевого управления, соответствующая желаемой кривизне κ2 после присоединения прицепа 1500 с изогнутым дышлом к транспортному средству 100 таким образом, чтобы расстояние L, представляющее собой расстояние между задней осью 1502 транспортного средства 100 и шарнирным соединением 117 транспортного средства 100 с прицепом 110, было больше нуля или практически равно нулю. Соответственно, с помощью команд изменения направления движения, сгенерированных системой 105 помощи при движении задним ходом с прицепом, на этапе 1546 система 115 усилителя руля транспортного средства 100 изменяет направление движения транспортного средства 100 и обеспечивает движение прицепа 110 в соответствии с желаемой кривизной κ2.
Что касается работы системы 105 помощи при движении задним ходом с прицепом, на Фиг. 11-14 представлены данные о транспортном средстве, используемые системой 105 помощи при движении задним ходом с прицепом при управлении движением прицепа с изогнутым дышлом задним ходом в рамках одного маневра движения задним ходом при постоянном введенном значении кривизны. На Фиг. 11 представлен график кривизны κ2 и реальной кривизны во время выполнения маневра движения заднего хода, на котором показаны реальные значения кривизны, почти совпадающие с желаемой кривизной κ2 так же, как и значения измеренного угла сцепки γ(m) и заданные или предпочтительные значения угла сцепки γ(d) с Фиг. 12. Соответствующие значения угла δ поворота управляемых колес и скорости движения транспортного средства 100 для данных, изображенных на Фиг. 11-12, показаны для того же временного интервала, который показан на Фиг. 13-14. Кроме того, на Фиг. 15-18 представлен альтернативный набор экспериментальных данных о транспортном средстве, использующем систему 105 помощи при движении задним ходом с прицепом, при использовании стандартного прицепа. Аналогично результатам для прицепа с изогнутым дышлом, на Фиг. 15-18 показано, насколько точно наблюдаемая кривизна и измеренный угол сцепки γ(m) совпадают с желаемой кривизной κ2 и желаемым углом сцепки γ(d) во время реакции системы на изменения вводимого значения желаемой кривизны κ2 с Фиг. 15. Аналогичным образом значения угла δ поворота управляемых колес и скорости движения транспортного средства 100 для данных, изображенных на Фиг. 15-16, относятся к тому же временному интервалу, который показан на Фиг. 17-18, и практически полностью совпадают со значениями угла δ поворота управляемых колес и скорости движения транспортного средства 100 с Фиг. 13-14. Соответственно, из этих данных также видно, что контроллер 1508 (Фиг. 6) выдает практически одинаковые команды с помощью системы 105 помощи при движении задним ходом с прицепом для прицепов с изогнутым дышлом и для стандартных прицепов. Изображенные экспериментальные данные являются примером одного варианта работы системы 105 помощи при движении задним ходом с прицепом, при этом за счет регулировки другие варианты системы 105 помощи при движении задним ходом с прицепом могут обеспечить достижение более предпочтительных результатов.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения и что подобные концепции определены следующей формулой изобретения, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2575663C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2627219C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| Адаптивная система помощи при движении задним ходом автомобиля с прицепом | 2018 |
|
RU2702199C2 |

Группа изобретений относится к системе помощи при движении задним ходом с прицепом. Система помощи при движении задним ходом с прицепом содержит датчик сцепки, определяющий измеренное значение угла сцепки между транспортным средством и прицепом с дышлом, датчик рулевого управления, модуль ввода и контроллер. Контроллер содержит регулятор кривизны для определения желаемого динамического угла сцепки для направления прицепа задним ходом по вводимой водителем желаемой кривизне траектории движения на основе вводимой водителем желаемой кривизны траектории движения, угла поворота управляемых колес и кинематических данных о прицепе с дышлом и о транспортном средстве. Контроллер дополнительно содержит регулятор угла сцепки, который с помощью линеаризации обратной связи генерирует команду угла поворота для транспортного средства для руления транспортным средством и прицепом с желаемым динамическим углом сцепки на основе желаемого динамического угла сцепки, измеренного угла сцепки и скорости движения транспортного средства. Регулятор кривизны и регулятор угла сцепки функционируют совместно. Достигается повышение безопасности движения транспортного средства за счет обеспечения помощи водителю при движении задним ходом с прицепом. 3 н. и 17 з.п. ф-лы, 18 ил.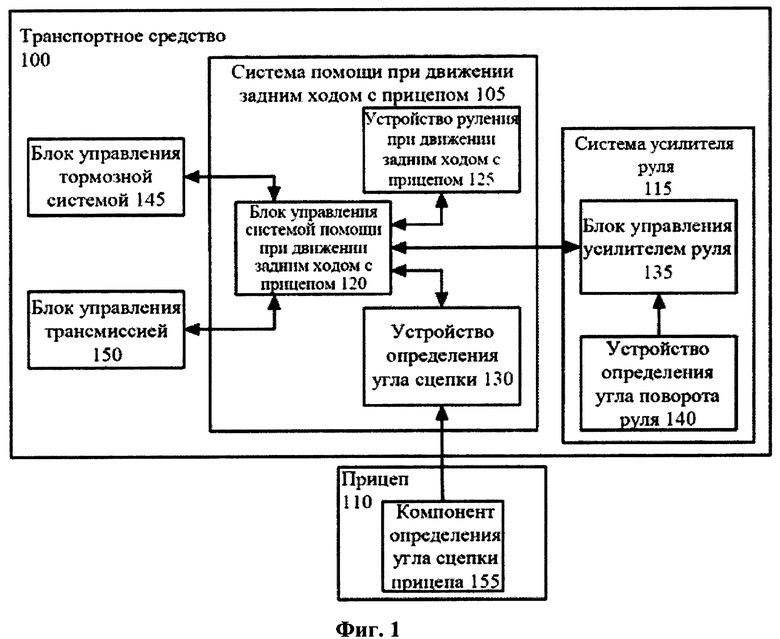
1. Система помощи при движении задним ходом с прицепом, содержащая:
датчик сцепки, определяющий измеренное значение угла сцепки между транспортным средством и прицепом с дышлом;
датчик рулевого управления, определяющий угол поворота управляемых колес транспортного средства;
модуль ввода, принимающий вводимую водителем желаемую кривизну траектории движения прицепа с дышлом; и
контроллер, содержащий регулятор кривизны для определения желаемого динамического угла сцепки для направления прицепа задним ходом по вводимой водителем желаемой кривизне траектории движения на основе вводимой водителем желаемой кривизны траектории движения, угла поворота управляемых колес и кинематических данных о прицепе с дышлом и о транспортном средстве, причем контроллер дополнительно содержит регулятор угла сцепки, который с помощью линеаризации обратной связи генерирует команду угла поворота для транспортного средства для руления транспортным средством и прицепом с желаемым динамическим углом сцепки на основе желаемого динамического угла сцепки, измеренного угла сцепки и скорости движения транспортного средства, при этом регулятор кривизны и регулятор угла сцепки функционируют совместно.
2. Система по п. 1, в которой регулятор угла сцепки выполнен с возможностью предотвращения ситуаций, когда желаемый динамический угол сцепки превысит угол складывания.
3. Система по п. 1, в которой модуль ввода включает в себя поворотное устройство управления, которое выполнено с возможностью поворота между первым положением, соответствующим первому значению кривизны траектории движения прицепа, и вторым положением, соответствующим второму значению кривизны траектории движения прицепа.
4. Система по п. 1, в которой между задней осью транспортного средства и шарнирным соединением транспортного средства с прицепом с дышлом имеется расстояние, причем, когда это расстояние по существу равно нулю, контроллер выполнен с возможностью генерирования команды угла поворота в соответствии с желаемой кривизной.
5. Система по п. 1, в которой прицеп с дышлом соединен с транспортным средством с помощью седельно-сцепного устройства рядом с задней осью транспортного средства, которое представляет собой шарнирное соединение, по существу выровненное относительно задней оси транспортного средства, причем контроллер выполнен с возможностью генерирования команды угла поворота независимо от расстояния между задней осью и шарнирным соединением.
6. Система по п. 1, в которой передние колеса транспортного средства являются управляемыми, причем управление передними колесами осуществляется на основе команды угла поворота.
7. Система помощи при движении задним ходом с прицепом, содержащая:
датчик, определяющий измеренное значение угла сцепки между транспортным средством и прицепом, причем транспортное средство имеет шарнирное соединение с прицепом, по существу выровненное относительно задней оси транспортного средства;
модуль ввода, который принимает вводимую водителем желаемую кривизну траектории движения прицепа; и
контроллер, содержащий:
- регулятор кривизны, выполненный с возможностью определения желаемого динамического угла сцепки для направления прицепа задним ходом по вводимой водителем желаемой кривизне траектории движения на основе вводимой водителем желаемой кривизны траектории движения и угла поворота управляемых колес транспортного средства, и
- регулятор угла сцепки, который с помощью линеаризации обратной связи генерирует команду угла поворота для руления транспортным средством и прицепом с желаемым динамическим углом сцепки на основе желаемого динамического угла сцепки, измеренного угла сцепки и скорости движения транспортного средства, при этом регулятор кривизны и регулятор угла сцепки функционируют совместно.
8. Система по п. 7, в которой регулятор угла сцепки включает в себя пропорционально-интегральный контроллер с коэффициентом усиления, зависящим от длины прицепа.
9. Система по п. 7, в которой регулятор угла сцепки выполнен с возможностью предотвращения ситуации, когда желаемый динамический угол сцепки превысит угол складывания.
10. Система по п. 7, в которой регулятор кривизны выполнен с возможностью определения желаемого динамического угла сцепки на основе кинематических данных о транспортном средстве и прицепе.
11. Система по п. 7, в которой регулятор кривизны выполнен с возможностью определения желаемого динамического угла сцепки на основе угла поворота управляемых колес, определенного с помощью регулятора угла сцепки.
12. Система по п. 7, в которой модуль ввода включает в себя планировщик траектории, генерирующий траекторию движения прицепа на основании желаемой кривизны для заданной траектории движения.
13. Система по п. 7, в которой дышло прицепа присоединено к транспортному средству вблизи задней оси транспортного средства, так что расстояние между задней осью транспортного средства и шарнирным соединением транспортного средства с прицепом по существу равно нулю.
14. Система по п. 7, в которой передние колеса транспортного средства являются управляемыми, причем управление передними колесами осуществляется на основе команды угла поворота.
15. Способ эксплуатации системы помощи при движении задним ходом с прицепом, при котором:
определяют измеренное значение угла сцепки между транспортным средством и прицепом;
определяют угол поворота управляемых колес транспортного средства;
вводят желаемую кривизну траектории движения прицепа;
определяют посредством регулятора кривизны желаемый динамический угол сцепки для направления прицепа задним ходом по вводимой желаемой кривизне траектории движения; и
генерируют посредством регулятора угла сцепки команду угла поворота для транспортного средства для руления транспортным средством и прицепом с желаемым динамическим углом сцепки с помощью линеаризации обратной связи и на основе желаемого динамического угла сцепки и измеренного угла сцепки, при этом регулятор кривизны и регулятор угла сцепки функционируют совместно.
16. Способ по п. 15, при котором команду угла поворота дополнительно генерируют на основе скорости движения транспортного средства.
17. Способ по п. 15, при котором дополнительно определяют угол складывания на основе длины прицепа и предотвращают превышение динамическим углом сцепки угла складывания.
18. Способ по п. 15, при котором желаемую кривизну траектории движения обеспечивают планировщиком траектории, генерирующим траекторию движения прицепа на основании желаемой кривизны для заданной траектории движения.
19. Способ по п. 15, при котором между задней осью транспортного средства и шарнирным соединением сцепного шара транспортного средства с дышлом прицепа имеется расстояние, причем, когда это расстояние по существу равно нулю, генерируют команду угла поворота в соответствии с желаемой кривизной.
20. Способ по п. 15, при котором транспортное средство имеет шарнирное соединение с прицепом, по существу выровненное относительно задней оси транспортного средства.
| US 2006103511 A1, 18.05.2006 | |||
| US 7195267 B1, 27.03.2007 | |||
| US 6854557 A1, 15.02.2005 | |||
| US 2006070774 A1, 06.04.2006. |

