Область техники, к которой относится изобретение
Настоящее изобретение относится к системам помощи водителю и технологиям активной безопасности для транспортных средств, в частности, к системе помощи при движении задним ходом с прицепом.
Уровень техники
Для большинства водителей управление транспортным средством с прицепом при движении задним ходом является очень сложной задачей. В частности, это относится к водителям, не имеющим опыта управления транспортным средством с прицепом при движении задним ходом, например, при редком вождении транспортного средства с прицепом (при аренде прицепа, редком использовании собственного прицепа и т.д.). Во-первых, эти сложности возникают из-за того, что при движении задним ходом на транспортных средствах с прицепом необходимо поворачивать руль в сторону, противоположную направлению поворота руля при движении задним ходом на транспортном средстве без прицепа, и/или из-за необходимости использования тормозов для стабилизации транспортного средства с прицепом до того, как произойдет складывание сцепки. Второй причиной является то, что небольшие ошибки рулевого управления транспортным средством с прицепом при движении задним ходом усиливаются, в результате чего прицеп значительно отклоняется от желаемой траектории.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения предложен способ калибровки системы помощи при движении задним ходом транспортного средства с прицепом. Способ предполагает движение транспортного средства вперед практически по прямой со скоростью, превышающей пороговое значение, измерение скорости рыскания транспортного средства и измерение угла сцепки прицепа. Способ также предполагает определение угловой скорости на основании измеренного значения угла сцепки. Способ также предполагает определение отклонения измеренного значения угла сцепки от фактического значения угла сцепки, когда скорость рыскания и скорость изменения угла практически равны нулю.
В соответствии с другим аспектом настоящего изобретения предложен способ калибровки системы помощи при движении задним ходом транспортного средства с прицепом. Способ предполагает движение транспортного средства вперед со скоростью, превышающей пороговое значение, направление транспортного средства по прямой и измерение угла сцепки прицепа. Способ также предполагает определение угловой скорости на основании измеренного значения угла сцепки. Способ также включает в себя определение отклонения измеренного значения угла сцепки от фактического значения угла сцепки, когда угловая скорость практически равна нулю.
В соответствии с еще одним аспектом настоящего изобретения предложена система калибровки системы помощи при движении задним ходом транспортного средства с прицепом. Система включает в себя датчик угла сцепки, который непрерывно измеряет угол сцепки для определения угловой скорости, и датчик рыскания, который непрерывно измеряет скорость рыскания транспортного средства. Система также включает в себя контроллер, который определяет отклонение измеренного значения угла сцепки, когда транспортное средство движется вперед со скоростью, превышающей пороговое значение, а скорость рыскания и угловая скорость практически равны нулю.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На данных чертежах представлено следующее.
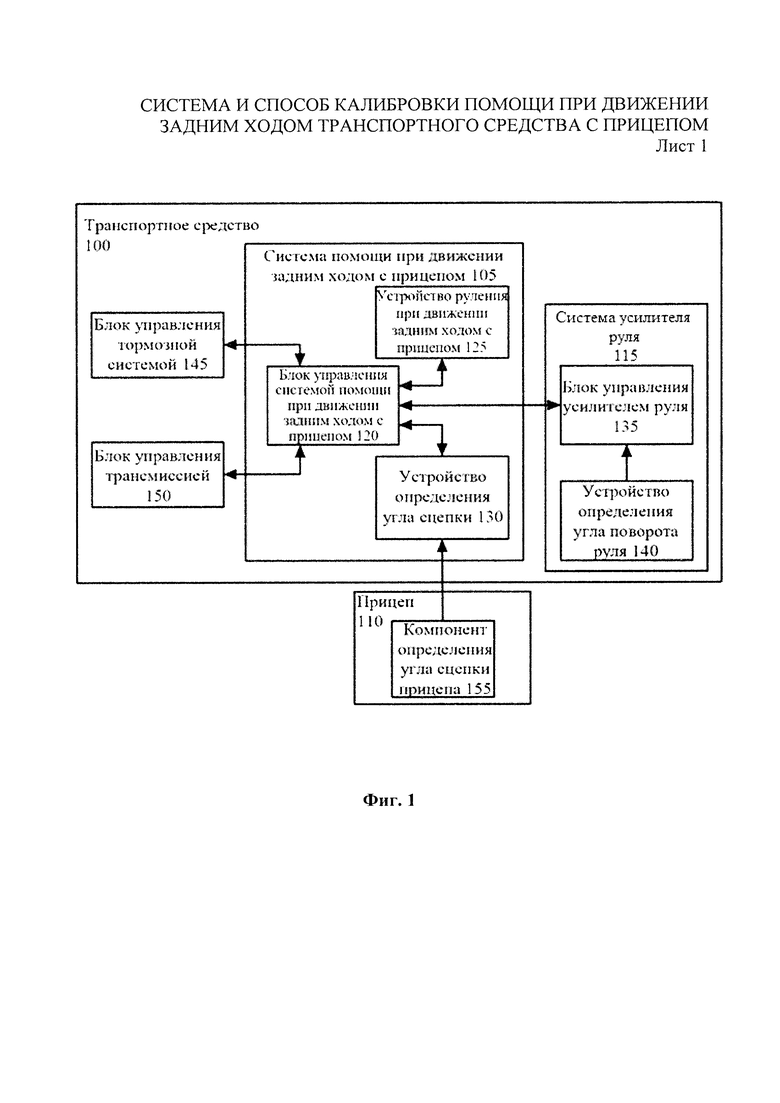
На Фиг. 1 представлена схема транспортного средства с прицепом, где транспортное средство выполнено с возможностью использования системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом.
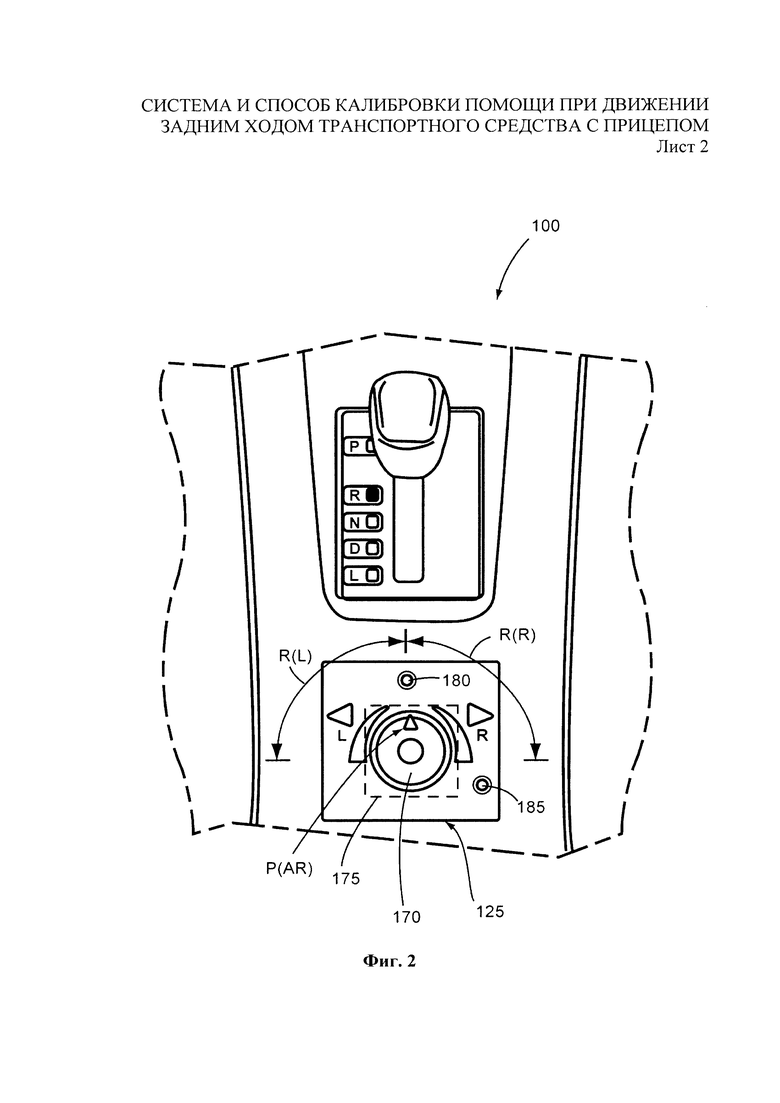
На Фиг. 2 представлен один вариант выполнения устройства руления при движении задним ходом с прицепом, описанного со ссылкой на Фиг. 1.
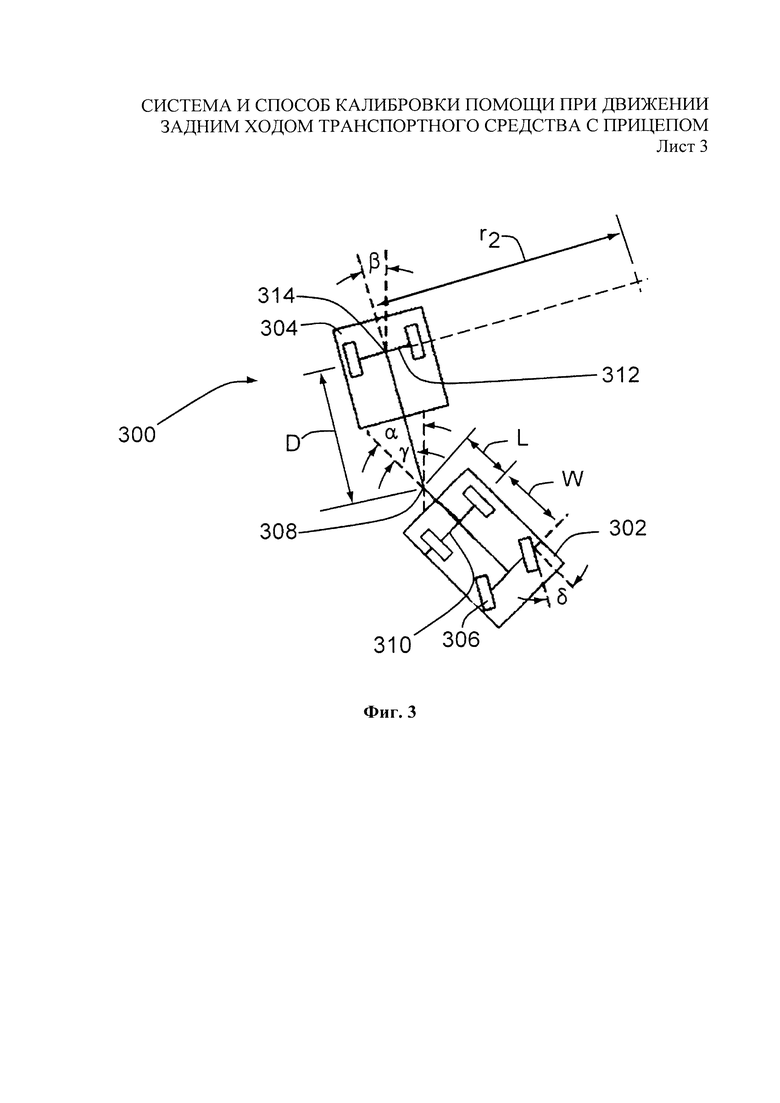
На Фиг. 3 представлено схематическое изображение кинематической модели, которая позволяет получить информацию, используемую во время работы системы помощи при движении задним ходом с прицепом в соответствии с одним вариантом осуществления.
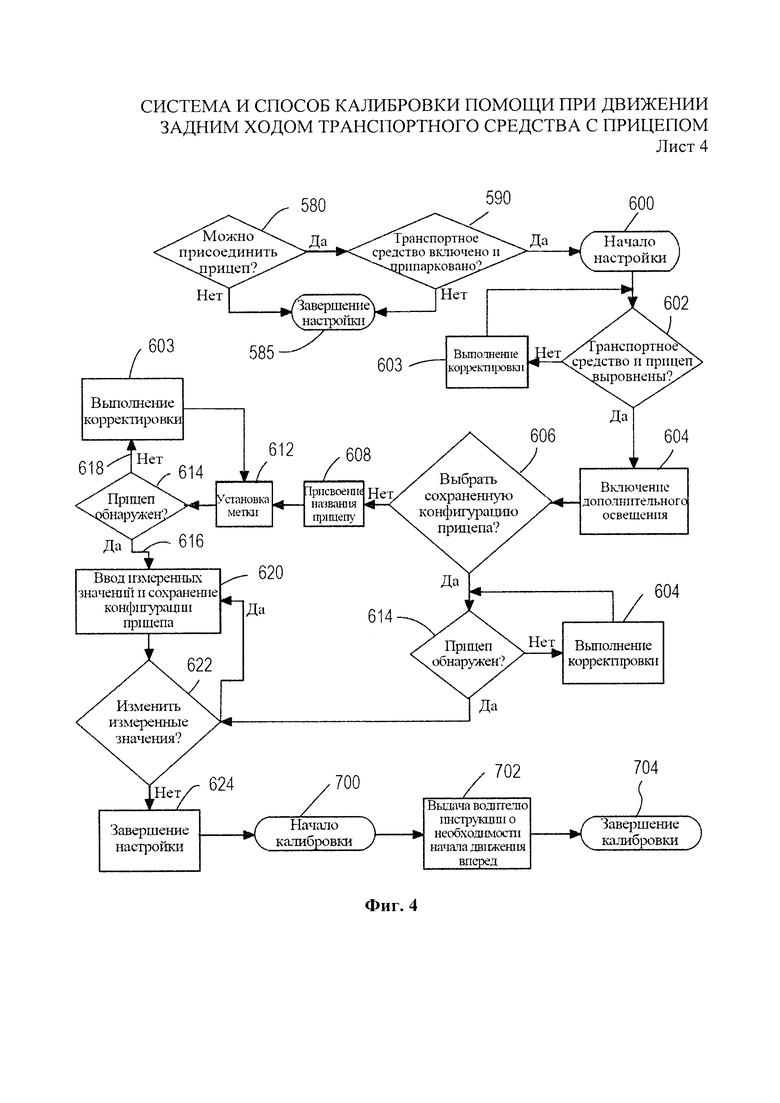
На Фиг. 4 представлена блок-схема способа работы системы помощи при движении задним ходом с прицепом.
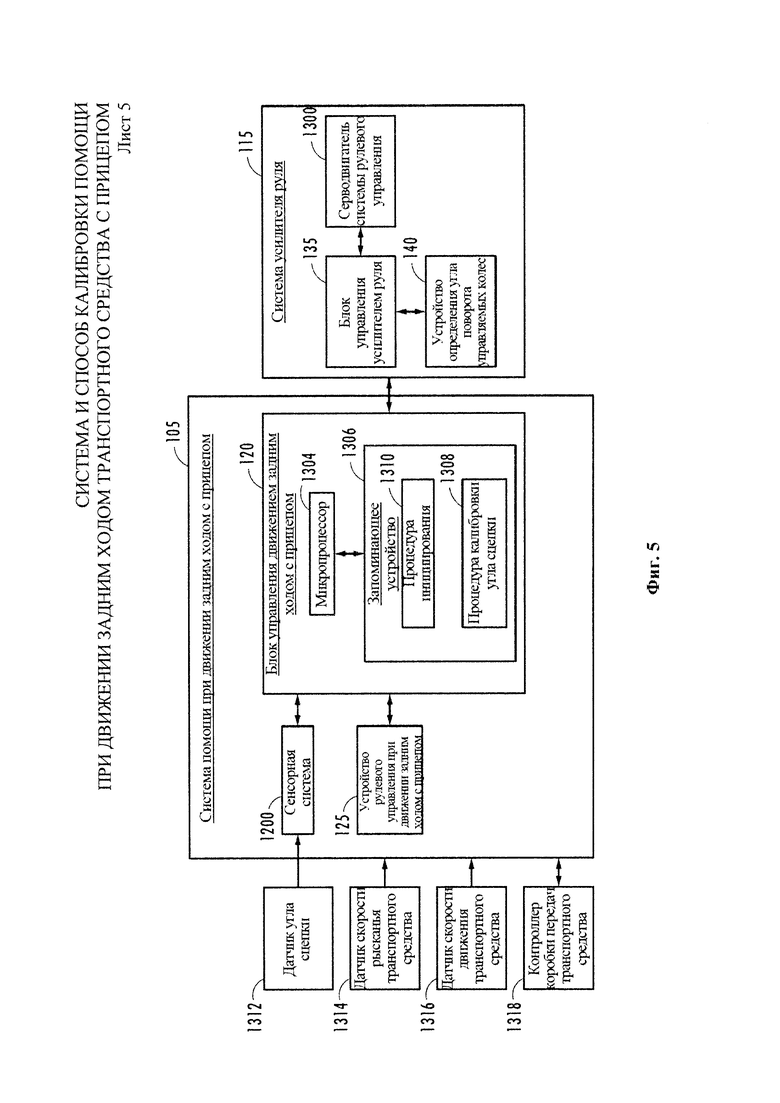
На Фиг. 5 представлена схема одного варианта выполнения системы помощи при движении задним ходом с прицепом, включающей в себя блок управления системой помощи при движении задним ходом с прицепом, использующий процедуру калибровки угла сцепки.
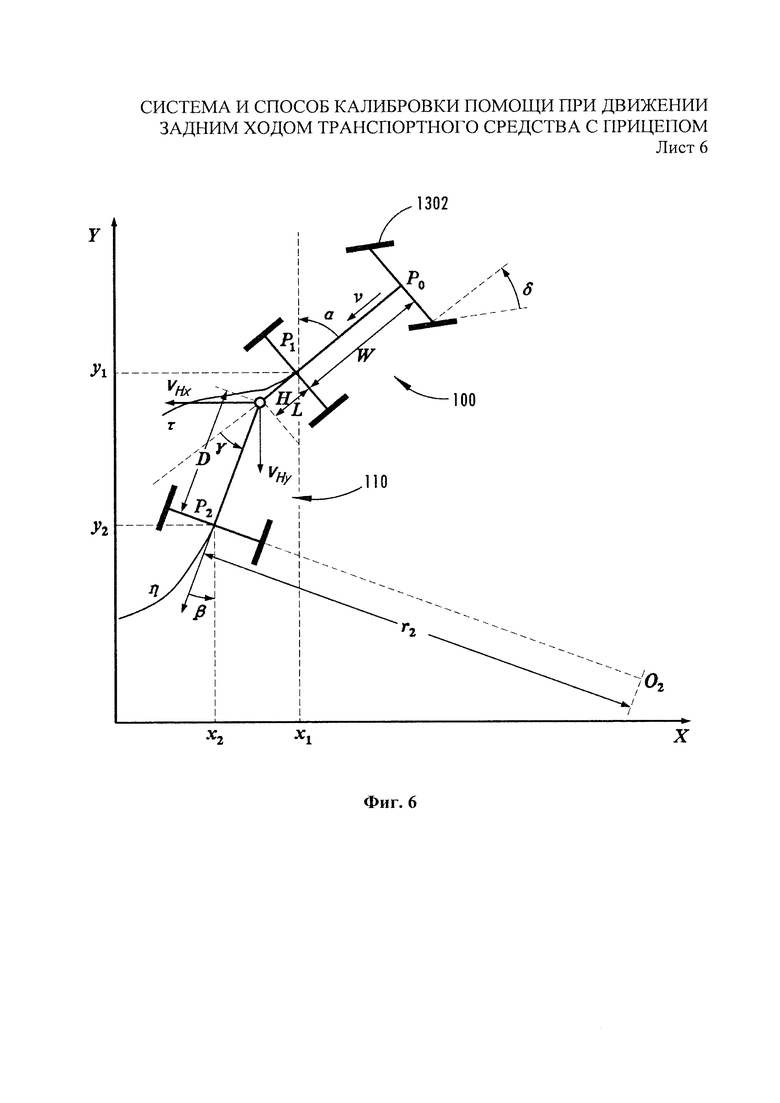
На Фиг. 6 представлена диаграмма, которая иллюстрирует геометрические параметры транспортного средства и прицепа в двухкоординатной системе х-у и переменные величины, используемые для расчета кинематических показателей системы транспортного средства и прицепа.
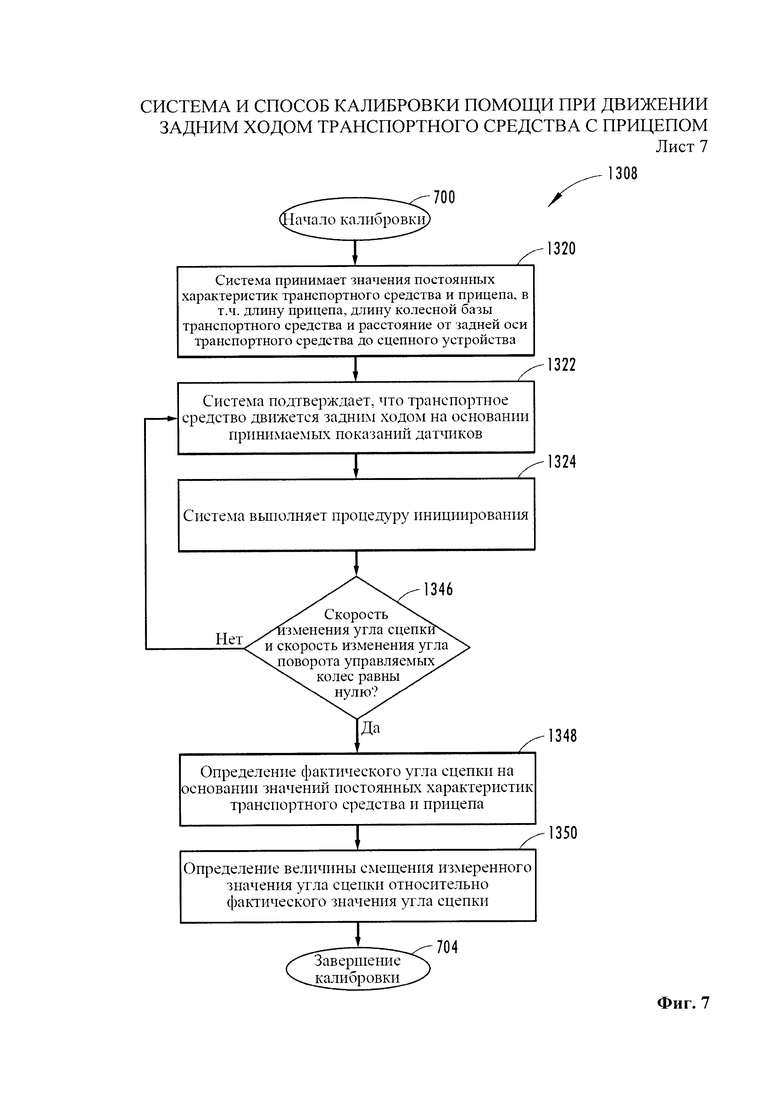
На Фиг. 7 представлена блок-схема одного варианта процедуры калибровки угла сцепки.
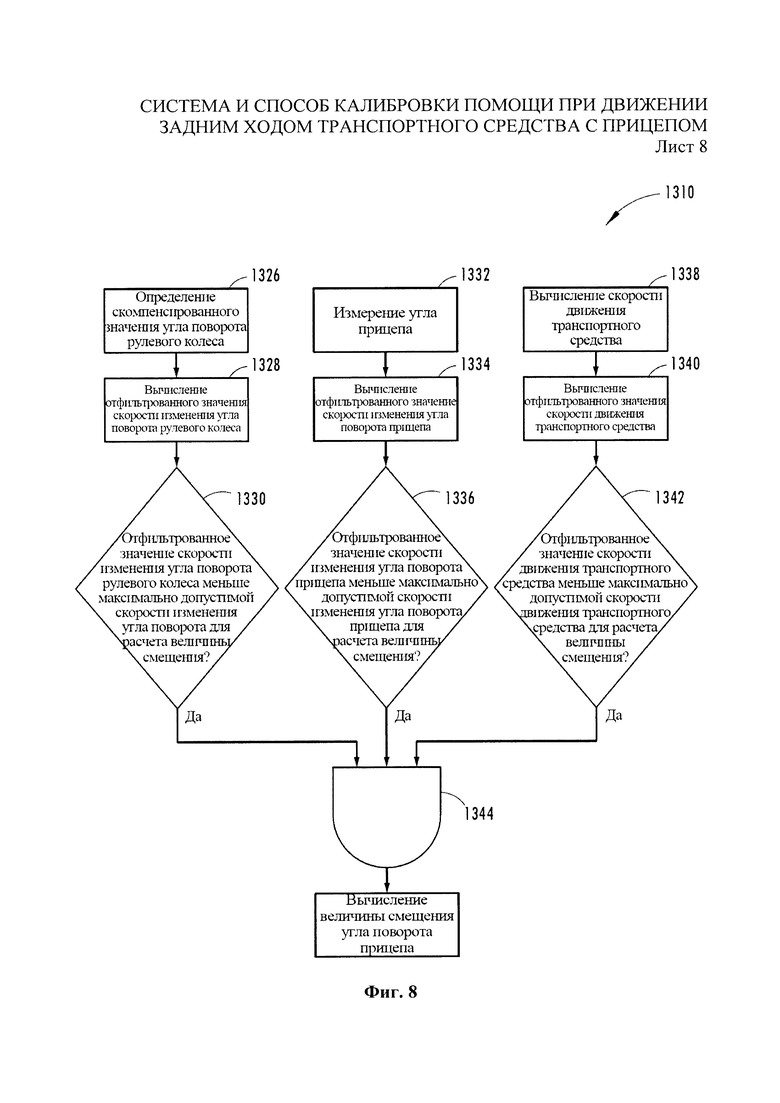
На Фиг. 8 представлена блок-схема процедуры инициирования, выполняемой перед расчетом отклонения угла прицепа в соответствии с одним вариантом осуществления изобретения.
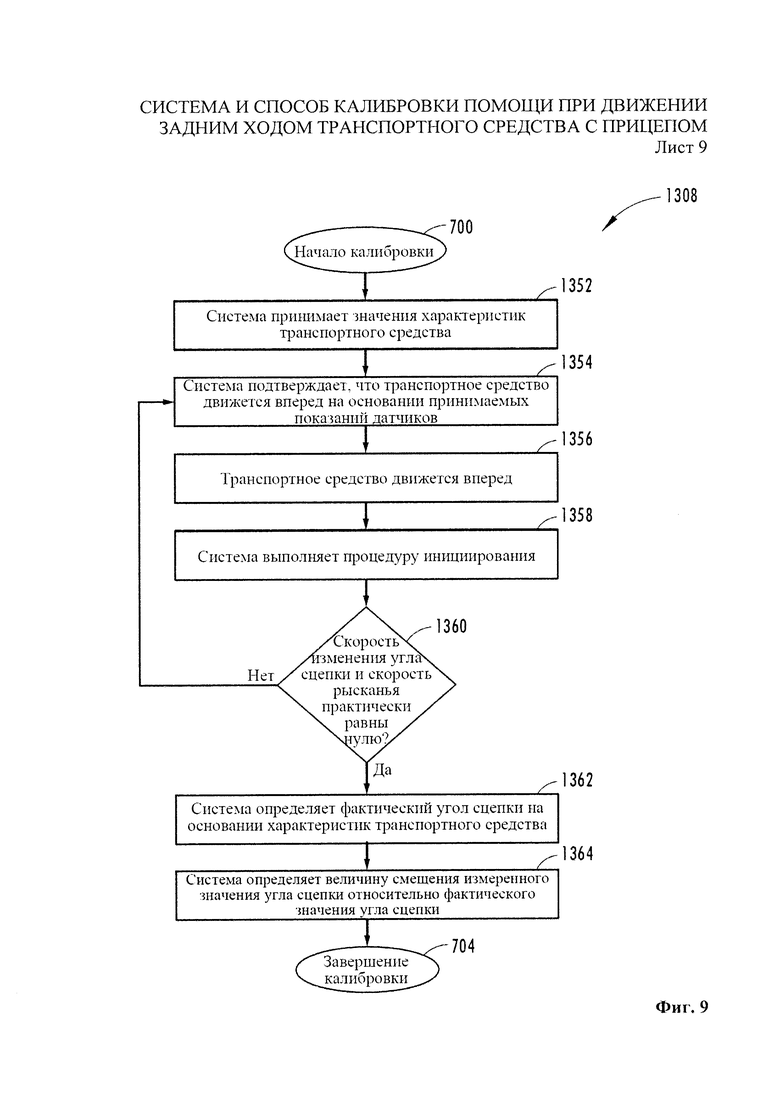
На Фиг. 9 представлена блок-схема дополнительного варианта процедуры калибровки угла сцепки.
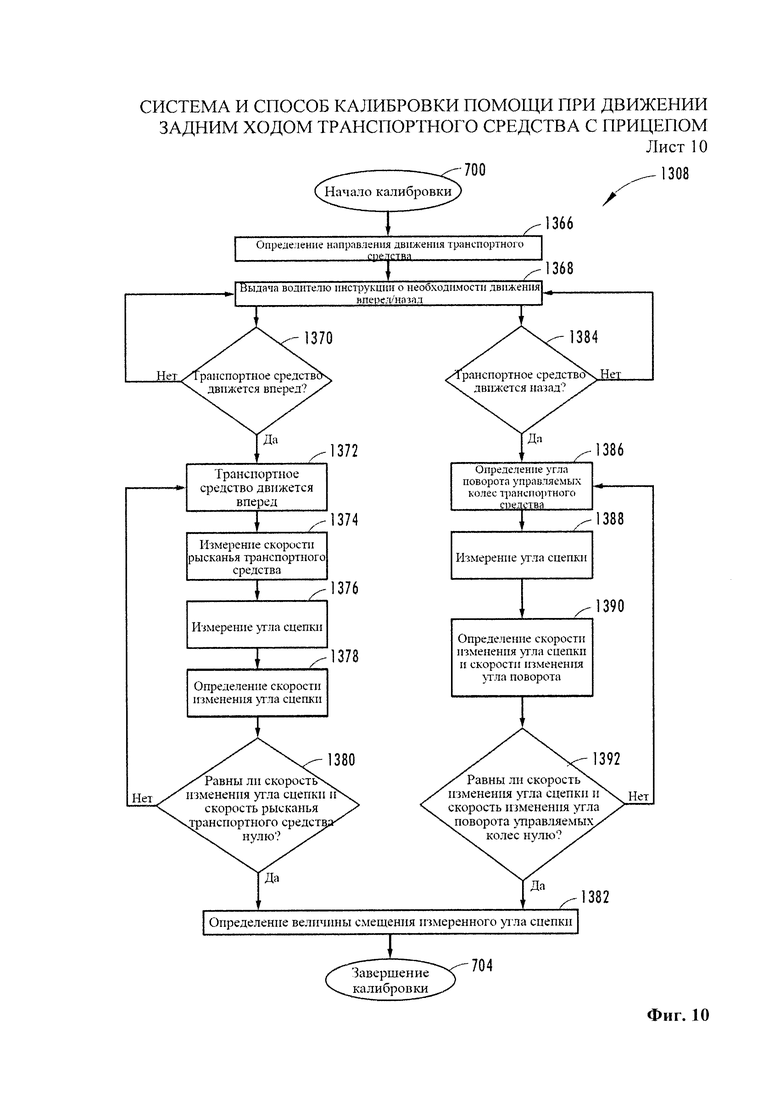
На Фиг. 10 представлена блок-схема способа калибровки системы помощи при движении задним ходом с прицепом, выполняемой до начала определения величины отклонения измеренного угла сцепки.
Осуществление изобретения
Хотя в настоящем документе различные аспекты изобретения рассмотрены со ссылкой на конкретные варианты осуществления, сущность изобретения не ограничивается этими вариантами, в связи с чем возможно выполнение модификаций, изменение вариантов использования и осуществления без выхода за рамки сущности изобретения. На сопроводительных чертежах одинаковыми ссылочными позициями обозначены аналогичные компоненты. Специалистам в данной области техники понятно, что различные компоненты, рассмотренные в настоящем документе, могут быть изменены без выхода за рамки сущности изобретения.
Настоящее изобретение направлено на предоставление функционала помощи при движении задним ходом с прицепом, в такой форме, чтобы стоимость была относительно низкой, а пользовательский интерфейс интуитивно понятным. В частности, предлагаемый функционал помощи при движении задним ходом с прицепом позволяет контролировать кривизну траектории движения прицепа, присоединенного к транспортному средству (т.е. контроля кривизны траектории движения прицепа), за счет того, что он позволяет водителю транспортного средства указать желаемую траекторию прицепа путем ввода предпочтительного значения кривизны его траектории, когда транспортное средство движется задним ходом, а прицеп продолжает его движение. Хотя для контроля кривизны траектории движения прицепа можно использовать ручку управления, группу виртуальных кнопок или сенсорный экран, настоящее изобретение не ограничивается конкретной конфигурацией интерфейса, с помощью которого будет вводиться предпочтительное значение кривизны траектории движения прицепа. Кроме того, в тех случаях, где рулевое колесо может быть механически отсоединено от управляемых колес транспортного средства, оно также может быть использовано в качестве интерфейса для введения предпочтительного значения кривизны траектории прицепа. Как будет подробно обсуждаться ниже, кинематическая информация системы, образованной транспортным средством и прицепом, используется для расчета взаимосвязи (т.е. кинематики) между кривизной прицепа и углом поворота транспортного средства для определения изменений угла поворота транспортного средства с целью обеспечить движение прицепа по определенной траектории. Команды рулевого управления, соответствующие необходимому изменению угла поворота, используются для управления системой рулевого управления буксирующего транспортного средства (например, системой рулевого управления с электроусилителем (EPAS)) для реализации таких изменений угла поворота управляемых колес транспортного средства, которые позволят гарантировать движение прицепа по определенной траектории (например, приблизиться к данной траектории). Система помощи при движении задним ходом с прицепом автоматически направляет комбинацию транспортного средства и прицепа, когда водитель использует коробку передач, педаль газа и педаль тормоза транспортного средства так, чтобы направить транспортное средство задним ходом. Водитель вводит команду о предпочтительной кривизне траектории прицепа, используя устройство ввода, такое как ручку для руления прицепом.
Кроме того, настоящее изобретение включает в себя варианты осуществления, позволяющие определить угол сцепки прицепа, присоединенного к транспортному средству. В соответствии с одним таким вариантом осуществления система помощи при движении задним ходом транспортного средства с прицепом может использовать метку, размещенную на прицепе, которая позволяет системе использовать информацию, получаемую путем формирования изображения и обработки метки. Метка представляет собой идентифицируемую визуальную метку, изображение которой может быть получено с помощью видеокамеры, распознано и обработано. В соответствии с одним вариантом осуществления изобретения метка может быть прикреплена к прицепу, предпочтительно в специальной области для размещения метки, таким образом, чтобы камера и устройство обработки изображения могли обнаружить метку и ее местоположение на прицепе, чтобы определить информацию, относящуюся к прицепу, такую как угол сцепки между прицепом и буксирующим транспортным средством.
В соответствии с некоторыми вариантами реализации системы помощи при движении задним ходом с прицепом предпочтительным может быть использование информации, характеризующей угол сцепки между транспортным средством и прицепом, присоединенным к данному транспортному средству. Настоящее изобретение включает в себя варианты осуществления, позволяющие оценить фактический угол сцепки прицепа, присоединенного к транспортному средству. Использование неточного значения угла сцепки может стать причиной неправильного или некорректного управления системой транспортного средства, особенно в том случае, когда информация об угле сцепки является важной для управления какой-либо системой транспортного средства, например, системой помощи при движении задним ходом с прицепом или контроллером тормозов прицепа.
Для обеспечения точности измеренного значения угла сцепки один из вариантов осуществления системы помощи при движении задним ходом с прицепом включает в себя процедуру калибровки угла сцепки для определения наличия любого отклонения измеренного значения угла сцепки от фактического значения угла сцепки на основании определенных характеристик транспортного средства и/или прицепа. В соответствии с одним вариантом осуществления способ предполагает измерение угла сцепки с помощью по крайней мере одного датчика угла сцепки, установленного на транспортном средстве, и измерение угла поворота управляемых колес транспортного средства. Способ также подразумевает направление транспортного средства задним ходом и, с помощью этого, определение отклонения измеренного значения угла сцепки от фактического значения угла сцепки, когда измеренное значение угла сцепки и угол поворота по большей части согласуются во время движения транспортного средства задним ходом. В другом варианте осуществления изобретения подразумевается направление транспортного средства вперед по существу прямо со скоростью, превышающей пороговое значение, с одновременным измерением скорости рыскания транспортного средства и измерением угла сцепки прицепа. Кроме того, способ подразумевает определение угловой скорости на основании измеренного значения угла сцепки, а затем определение величины отклонения измеренного значения угла сцепки от фактического значения угла сцепки при примерно нулевых значениях скорости рыскания и угловой скорости. Затем полученная величина отклонения может быть использована для более точной корректировки фактического угла сцепки за счет использования системы помощи при движении задним ходом с прицепом.
На Фиг. 1 изображена схема транспортного средства 100, выполненного с возможностью реализации функционала помощи при движении задним ходом с прицепом. Система 105 помощи при движении задним ходом с прицепом, используемая в транспортном средстве 100, управляет кривизной траектории движения прицепа 110, присоединенного к транспортному средству 100. Подобное управление выполняется за счет взаимодействия системы 115 усилителя руля транспортного средства 100 и системы 105 помощи при движении задним ходом с прицепом. При работе системы 105 во время движения транспортного средства 100 задним ходом водитель иногда ограничен в способах подачи команд руления с помощью рулевого колеса транспортного средства 100. Это может быть связано с тем, что в некоторых транспортных средствах система 105 помощи при движении задним ходом с прицепом управляется системой 115 усилителя руля, которая напрямую соединена с рулевым колесом (т.е. рулевое колесо транспортного средства 100 поворачивается вместе с управляемыми колесами транспортного средства 100). Для подачи команд на изменение кривизны траектории движения прицепа 110 может быть использован человеко-машинный интерфейс (HMI) системы 105 помощи при движении задним ходом с прицепом, например, ручка, за счет чего такие команды могут вводиться независимо от рулевого колеса транспортного средства 100. Однако в некоторых транспортных средствах с системой помощи при движении задним ходом с прицепом, соответствующей настоящему изобретению, может быть предусмотрена возможность выборочного отсоединения рулевого колеса от управляемых колес транспортного средства, что позволит использовать рулевое колесо для изменения кривизны траектории движения прицепа при движении задним ходом.
Система 105 помощи при движении задним ходом с прицепом, представленная на Фиг. 1, включает в себя блок 120 управления системой помощи при движении задним ходом с прицепом, устройство 125 руления прицепом при движении задним ходом и устройство 130 определения угла сцепки. Блок 120 управления системой помощи при движении задним ходом с прицепом соединен с устройством 125 руления прицепом при движении задним ходом и устройством 130 определения угла сцепки с возможностью передачи данных между ними. Блок 120 управления системой помощи при движении задним ходом с прицепом соединен с блоком 135 управления усилителем руля системы 115 усиления рулевого управления с возможностью передачи данных между ними. Устройство 140 определения угла поворота в системе 115 усиления рулевого управления соединено с блоком 135 управления усилителем руля с возможностью передачи данных между ними. Система помощи при движении задним ходом с прицепом также соединена с блоком 145 управления тормозной системой и блоком 150 управления трансмиссией с возможностью передачи данных между ними. Система 105 помощи при движении задним ходом с прицепом, система 115 усиления рулевого управления, блок 145 управления тормозной системой, блок 150 управления трансмиссией и устройство переключения передач (PRNDL) представляют собой компоненты системы, управляющей движением задним ходом с прицепом в соответствии с одним вариантом осуществления настоящего изобретения.
Блок 120 управления системой помощи при движении задним ходом с прицепом предназначен для реализации логики (т.е. выполнения инструкций) для приема информации от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Блок 120 управления системой помощи при движении задним ходом с прицепом (например, его алгоритм кривизны траектории движения прицепа) генерирует информацию о рулевом управлении транспортным средством в виде функции зависимости от всех или некоторых данных, полученных от устройства 125 руления прицепом при движении задним ходом, устройства 130 определения угла сцепки, блока 135 управления усилителем руля, блока 145 управления тормозной системой и блока 150 управления трансмиссией. Затем полученные данные о рулевом управлении транспортным средством предоставляются блоку 135 управления усилителем руля для обеспечения управления транспортным средством 100 системой 115 усиления рулевого управления в соответствии с заданной траекторией движения прицепа 110.
Устройство 125 руления прицепом при движении задним ходом предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные, задающие траекторию движения прицепа 110 (т.е. данные о рулении прицепом). Данные о рулении прицепом могут включать в себя данные, относящиеся к запрошенному изменению траектории движения (например, изменению радиуса кривизны траектории движения), и данные, указывающие на необходимость движения прицепа вдоль центральной оси прицепа (т.е. практически вдоль прямой). Устройство 125 руления прицепом при движении задним ходом может включать в себя поворотное устройство управления, позволяющее водителю транспортного средства 100 взаимодействовать с устройством 125 руления прицепом при движении задним ходом и вводить команды прицепу на выполнение желаемых действий (например, команду на выполнение желаемого изменения радиуса траектории движения прицепа и/или команду двигаться по практически прямой траектории, определяемой продольной центральной осью прицепа). Поворотное устройство управления может представлять собой ручку, поворачивающуюся вокруг оси, проходящей через верхнюю/лицевую поверхность ручки. В других вариантах поворотное устройство управления может представлять собой ручку, поворачиваемую вокруг оси, проходящей практически параллельно верхней/лицевой поверхности ручки.
В соответствии с вариантом осуществления с Фиг. 1 устройство 130 определения угла сцепки функционирует совместно с компонентом 155 определения угла сцепки прицепа 110 и передает на блок 120 управления системой помощи при движении задним ходом с прицепом данные об угле между транспортным средством 100 и прицепом 110 (т.е. данные об угле сцепки). В соответствии с одним вариантом осуществления устройство 130 определения угла сцепки представляет собой камеру, например, камеру заднего обзора транспортного средства 100, которая захватывает изображения (т.е. визуально отслеживает) метки (т.е. компонента 155 определения угла сцепки), прикрепленной к прицепу 110, во время движения задним ходом транспортного средства 100 с прицепом 110. В качестве альтернативы устройство 130 определения угла сцепки может представлять собой устройство, которое физически устанавливается на компоненте сцепки транспортного средства 100 и/или на сопряженном компоненте сцепки прицепа 110 и позволяет определить угол между центральными продольными осями транспортного средства 100 и прицепа 110.
Блок 135 управления усилением рулевого управления в системе, соответствующей варианту осуществления с Фиг. 1, предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные об угловом положении (например, об угле) рулевого колеса и/или угловом положении (например, об угле (углах) поворота) управляемых колес транспортного средства 100. В соответствии с некоторыми вариантами осуществления блок 120 управления системой помощи при движении задним ходом с прицепом может быть интегрированным компонентом системы 115 усиления рулевого управления. Блок 145 управления тормозной системой предоставляет блоку 120 управления системой помощи при движении задним ходом с прицепом данные о скорости движения транспортного средства. Данные о скорости движения транспортного средства могут быть определены на основании скорости вращения каждого колеса, наблюдаемой с помощью блока 145 управления тормозной системой или могут быть предоставлены блоком управления двигателем с проверкой достоверности сигнала. Скорость движения транспортного средства также может быть получена на основании данных от блока управления двигателем. В соответствии с некоторыми вариантами блок 120 управления системой помощи при движении задним ходом с прицепом может предоставлять блоку 145 управления тормозной системой данные о торможении транспортного средства, на основании которых блок 120 управления системой помощи при движении задним ходом с прицепом сможет управлять тормозами транспортного средства 100 во время движения задним ходом с прицепом 110. Для регулировки скорости и ускорения транспортного средства 100 во время движения задним ходом с прицепом 110 блок 150 управления трансмиссией может обмениваться данными с блоком 120 управления системой помощи при движении задним ходом с прицепом.
На Фиг. 2 представлен один вариант осуществления устройства 125 руления прицепом при движении задним ходом, описанного со ссылкой на Фиг. 1. Поворачиваемый элемент управления в форме ручки 170, соединен с устройством 175 определения величины перемещения. Ручка 170 отклонена (например, с помощью возвратной пружины) в дежурное положение P(AR) между противоположными поворотными диапазонами перемещения R(R), R(L). Первый из противоположных поворотных диапазонов R(R) практически равен второму из противоположных поворотных диапазонов перемещения R(L), R(R). Устройство 175 определения перемещения выполнено с возможностью измерения перемещения ручки 170 и выдачи соответствующего сигнала (т.е. сигнала о перемещении) на устройство 125 руления прицепом при движении задним ходом, изображенное на Фиг. 1. Сигнал о перемещении от устройства 175 генерируется как функция от величины поворота ручки 170 относительно дежурного положения P(AR), скорости перемещения ручки 170 и/или направления перемещения ручки 170 относительно дежурного положения P(AR). Дежурное положение P(AR) ручки 170 соответствует сигналу от устройства определения величины перемещения, указывающему, что транспортным средством 100 нужно управлять таким образом, чтобы прицеп 110 двигался задним ходом по практически прямой траектории (команда движения прицепа по траектории с нулевой кривизной), соответствующей центральной продольной оси прицепа 110, когда ручка 170 была возвращена в дежурное положение P(AR), а крайнее положение по часовой стрелке или против часовой стрелки ручки 170 (т.е. пределы противоположных диапазонов поворота движения R(R), R(L)) каждое соответствует сигналу от устройства определения перемещения, указывающему на минимальный радиус кривизны (т.е. наиболее крутая траектория) траектории движения прицепа 110 который возможен без того, чтобы соответствующая информация для руления транспортным средством привела к складыванию. В данном случае дежурное положение P(AR) представляет собой назначенное положение, подающее команду на движение с нулевой кривизной относительно противоположных диапазонов поворота движения R(R), R(L).
Также предполагается, что система по изобретению может быть реализована с таким устройством управления, которое не является поворотным (т.е. неповоротное устройство управления). Аналогично поворотному устройству ввода, выполненному в соответствии с настоящим изобретением (например, ручка 170 и соответствующее устройство определения перемещения), неповоротное устройство ввода выполнено с возможностью выборочного предоставления сигнала, приводящего к движению прицепа по участку траектории, который является по существу прямым, и выборочного предоставления сигнала, приводящего к движению прицепа по участку траектории, который является изогнутым. Примерами таких неповоротных устройств ввода могут являться, не ограничиваясь этим, группа нажимных кнопок (например, кнопка поворота налево, кнопка поворота направо и кнопка движения по прямой), сенсорный экран, с помощью которого водитель может нарисовать или иным образом задать кривизну траектории движения, кнопку, перемещаемую вдоль оси, с помощью которой водитель может ввести команды по траектории движения, или джойстик и т.д.
Что касается кинематической модели, используемой для расчета взаимосвязи между кривизной траектории движения прицепа и углом поворота транспортного средства, буксирующего прицеп, то для системы помощи при движении задним ходом с прицепом, выполненной в соответствии с некоторыми вариантами осуществления настоящего изобретения, предпочтительным может быть использование кинематической модели низкого порядка. Для получения такой кинематической модели низкого порядка необходимо сделать несколько допущений, касающихся параметров, связанных с системой транспортного средства с прицепом. Примерами таких допущений могут являться, не ограничиваясь этим, движение транспортного средства с прицепом задним ходом с относительно низкой скоростью, пренебрежение проскальзыванием колес транспортного средства и прицепа, пренебрежение боковой податливостью шин транспортного средства, пренебрежение деформацией шин транспортного средства и прицепа, пренебрежение динамикой исполнительного механизма транспортного средства, пренебрежение движением крена или тангажа транспортного средства и прицепа.
Как показано на Фиг. 3, кинематическая модель 300 системы, включающей в себя транспортное средство 302 и прицеп 304, основана на различных параметрах транспортного средства 302 и прицепа 304. Эти параметры кинематической модели включают в себя:
δ: угол поворота управляемых передних колес 306 транспортного средства 302;
α: угол рыскания транспортного средства 302;
β: угол рыскания прицепа 304;
γ: угол сцепки (γ=β-α);
W: колесная база транспортного средства 302;
L: расстояние между точкой 308 сцепки и задней осью 310 транспортного средства 302;
D: расстояние между точкой 308 сцепки и осью 312 прицепа 304 (длина оси 312 может представлять собой эффективное или эквивалентное значение длины оси прицепа с несколькими осями);
r2: радиус кривизны для прицепа 304.
Кинематическая модель 300 с Фиг. 3 выявляет взаимосвязь между радиусом кривизны r2 траектории движения прицепа в средней точке 314 оси 312 прицепа 304, углом поворота δ управляемых колес 306 транспортного средства 302 и углом сцепки γ. Как показано в следующем уравнении, эта взаимосвязь может быть выражена для получения кривизны траектории κ2 движения прицепа таким образом, чтобы при заданном значении γ кривизну κ2 траектории движения прицепа можно быть контролировать на основании изменения угла поворота δ (где  - скорость рыскания прицепа, а
- скорость рыскания прицепа, а  - скорость прицепа).
- скорость прицепа).
Или же эта взаимосвязь может быть выражена для получения угла поворота δ как функции кривизны κ2 траектории прицепа и угла сцепки γ.

Кривизна κ2 траектории прицепа определяется из команд водителя, введенных через устройство руления прицепом при движении задним ходом. Используя данное уравнение для определения угла поворота, можно сгенерировать соответствующую команду рулевого управления для управления системой рулевого управления (например, ее исполнительным механизмом) транспортного средства.
Со ссылкой на Фиг. 3, в одном из вариант осуществления может быть желательным ограничить потенциальную возможность для транспортного средства 302 и прицепа 304 достигать угла складывания (т.е. такого состояния транспортного средства и прицепа, в котором достигается условие складывания). Угол складывания γ(j) относится к углу сцепки γ, который при движении задним ходом не может быть выправлен с помощью максимального управляющего входного сигнала, например, перемещения управляемых передних колес 306 транспортного средства 302 на максимальный угол поворота δ с максимальной скоростью изменения угла поворота.
Для реализации принципов управления одного варианта системы помощи при движении задним ходом с прицепом, водитель должен взаимодействовать с системой 105 для ее настройки. Транспортное средство 100 может иметь человеко-машинный интерфейс (HMI) 102, с помощью которого водитель, использующий человеко-машинный интерфейс 102, может управлять системой помощи при движении задним ходом с прицепом. Например, на человеко-машинном интерфейсе 102 водителю может быть отображено несколько меню 104, которые помогают водителю управлять различными модулями, которые настраивают (этап 600), калибруют (этап 700) и активируют (этап 800) систему 105 помощи при движении задним ходом с прицепом. Система 105 будет выдавать водителю подсказки о действиях, необходимых для подключения прицепа, ввода измеренных параметров прицепа, таких как горизонтальное расстояние от задней части транспортного средства до центра шара сцепного устройства, а также проверки совместимости прицепа и исправности датчика угла сцепки.
После завершения настройки 600 на этапе 624, калибровка предназначена для калибровки алгоритма управления кривизной на основании измеренных параметров прицепа и калибровки системы помощи при движении задним ходом с прицепом для любой возможной величины отклонения угла сцепки. После завершения настройки 600 начинается калибровка 700, где на этапе 702 водителю предлагается тянуть транспортное средство с прицепом вперед по прямой, пока не завершится калибровка датчика угла сцепки. Человеко-машинный интерфейс может уведомить водителя, с помощью всплывающего сообщения или окна, что для завершения калибровки транспортного средства с прицепом необходимо переместить транспортное средство с прицепом вперед. После завершения калибровки человеко-машинный интерфейс может на этапе 704 уведомить водителя. Любое значение отклонения угла сцепки сохраняется на запоминающем устройстве, и доступ к нему осуществляется по мере необходимости во время выполнения алгоритма управления кривизной траектории движения, после чего этапом 704 завершается выполнение процесса калибровки 700. Следует отметить, что, хотя в выше описана калибровка, которая может выдавать водителю информацию о движении вперед, в рамках настоящего изобретения также могут быть использованы и другие способы калибровки угла сцепки.
Система помощи при движении транспортного средства с прицепом задним ходом может использовать метку, установленную на прицепе, которая используется в качестве компонента 155 определения угла сцепки. В этом случае, в соответствии с одним вариантом осуществления изобретения, система помощи при движении задним ходом с прицепом может использовать информацию, полученную с помощью захвата и обработки изображения метки, для обеспечения работы устройства 130 определения угла сцепки. В соответствии с другими вариантами осуществления метка может быть использована для идентификации смены присоединенного прицепа, присоединения и отсоединения прицепа и другой информации, относящейся к прицепу. Метка представляет собой идентифицируемую визуальную метку, которая может быть захвачена на изображении видеокамеры, детектирована и обработана с помощью обработки изображений. В соответствии с одним вариантом осуществления изобретения метка может представлять собой наклеиваемую метку, также известную как стикер, которую можно приклеить на прицеп с помощью клея с одной стороны, предпочтительно в пределах области для метки, где камера и устройство обработки изображения смогут обнаружить метку и ее местоположение на прицепе для определения информации, относящейся к прицепу, например, угла между прицепом и буксирующим транспортным средством.
Как было сказано выше со ссылкой на Фиг. 4 в рамках описания процесса взаимодействия водителя с человеко-машинным интерфейсом (HMI) 102, после завершения выполнения настройки 600 прицепа на этапе 620 в ходе калибровки 700, в соответствии с одним вариантом осуществления изобретения, калибруется алгоритм контроля кривизны траектории движения на основании измеренных параметров прицепа и калибруется система помощи при движении задним ходом с прицепом для любой возможной величины отклонения угла сцепки. В соответствии с одним вариантом осуществления во время выполнения калибровки 700 водителю может быть предложено направить транспортное средство с прицепом вперед по прямой до тех пор, пока не завершится калибровка датчика угла сцепки, например, с помощью человеко-машинного интерфейса 102. В зависимости от ошибок, возникающих в результате измерений параметров прицепа или потенциальной неспособности транспортного средства двигаться вперед, в настоящем документе предусмотрены дополнительные или альтернативные варианты калибровки системы помощи при движении задним ходом с прицепом.
На Фиг. 5 изображена система 105 помощи при движении задним ходом транспортного средства с прицепом, включающая в себя блок 120 управления системой помощи при движении задним ходом с прицепом, соединенный с сенсорной системой 1200, и устройство 125 руления прицепом при движении задним ходом, являющееся частью системы 105 помощи при движении задним ходом с прицепом. В соответствии с представленным вариантом осуществления система 105 помощи при движении задним ходом с прицепом может принимать информацию от датчика 1312 угла сцепки, датчика 1314 скорости рыскания транспортного средства и/или датчика 1316 скорости движения транспортного средства, а также может связываться с другими подходящими датчиками транспортного средства 100 или прицепа 110. В соответствии с одним примером, представленный вариант осуществления системы 105 помощи при движении задним ходом с прицепом также связывается с контроллером 1318 коробки передач транспортного средства, которая может передавать данные о включенной передаче. Кроме того, блок 120 управления системой помощи при движении задним ходом с прицепом также напрямую соединен с системой 115 усиления рулевого управления, включающей в себя блок 135 управления усилителем руля, который позволяет обмениваться данными с устройством 140 определения угла поворота и серводвигателем 1300 системы рулевого управления для задействования управляемых колес 1302 буксирующего транспортного средства 100 (Фиг. 6). Изображенный вариант осуществления блока 120 управления системой помощи при движении задним ходом с прицепом включает в себя микропроцессор 1304, выполняющий одну или несколько процедур, сохраненных на соответствующем запоминающем устройстве 1306 блока 120 управления системой помощи при движении задним ходом с прицепом. В соответствии с одним вариантом осуществления запоминающее устройство включает в себя процедуру 1308 калибровки угла сцепки и процедуру 1310 инициирования. Следует понимать, что блок 120 управления системой помощи при движении задним ходом с прицепом может представлять собой отдельный специализированный контроллер или контроллер совместного доступа, встроенный в другие системы управления, например, в систему 1200 датчиков, устройство 125 руления прицепом при движении задним ходом, или другие системы буксирующего транспортного средства.
На Фиг. 6 схематическая иллюстрация транспортного средства и прицепа наложена на двухкоординатную систему х-у, демонстрируя кинематические переменные и углы, включая угол поворота δ, длину D прицепа и угол сцепки γ, на которые может влиять динамика транспортного средства 100 с прицепом 110, и могут быть представлены в кинематических уравнениях, как было аналогичным образом сказано выше со ссылкой на Фиг. 3.
На Фиг. 7-8 представлен способ расчета фактического угла сцепки γ(а) между транспортным средством 100 и прицепом 110 в соответствии с одним вариантом осуществления изобретения. Способ включает в себя измерение угла сцепки γ(m) с помощью по крайней мере одного датчика 1312 угла сцепки (Фиг. 5), установленного на транспортном средстве 100, и измерение угла поворота 8 управляемых колес 1302 (Фиг. 6) транспортного средства 100, Способ также предусматривает движение задним ходом транспортного средства 100 для определения величины отклонения γ(о) измеренного значения угла сцепки γ(m) от фактического значения угла сцепки γ(а), когда измеренное значение угла сцепки γ(m) и значение угла поворота δ во время движения транспортного средства 100 задним ходом являются практически постоянными.
Как отражено в блок-схеме с Фиг. 6, при постоянных значениях угла сцепки γ и угла поворота δ скорость рыскания транспортного средства 100 является практически постоянной и равной скорости рыскания прицепа 110. Это взаимодействие позволяет сформулировать кинематические уравнения, решение которых позволит определить величину отклонения γ(о) измеренного значения угла сцепки γ(m) от фактического значения угла сцепки γ(а). В частности, скорость рыскания транспортного средства 100, измеренная датчиком 1314 скорости рыскания транспортного средства (Фиг. 5) или другим подходящим бортовым датчиком транспортного средства, который позволяет определить скорость рыскания, можно представить в виде следующего уравнения:
Кроме того, скорость рыскания прицепа может быть представлена в виде следующего уравнения:
где
δ - угол поворота передних колес,
D - расстояние от сцепки до оси прицепа,
W - база транспортного средства (расстояние между осями),
L - расстояние от задней оси транспортного средства до сцепки,
γ - угол сцепки.
Соответственно, когда скорости рыскания транспортного средства 100 и прицепа 110 становятся равными, фактический угол сцепки γ(а) скорее всего будет постоянным, таким образом, предпочтительное значение угла сцепки, выдаваемое устройством 125 руления прицепом при движении задним ходом, например, описанным выше поворотным устройством управления с Фиг. 2, также будет постоянным или практически постоянным. Например, предпочтительное значение угла сцепки от устройства 125 руления прицепом при движении задним ходом может быть постоянным при намерении водителя направить транспортное средство 100 с прицепом 110 по прямой линии (т.е. при подаче команды движения по траектории с нулевой кривизной) или при повороте ручки управления на максимальную величину. Используя получившееся постоянное значение угла сцепки, можно составить следующее уравнение:
с=a cosγ + b sinγ
Данное уравнение может быть переписано следующим образом:

Указанное выше уравнение может быть решено как квадратное уравнение для угла сцепки γ. После этого при разбитии угла сцепки γ на измеренный угол сцепки γ(m) и угловое отклонение γ(о) уравнение приобретает следующий вид:

где
Соответственно, величина отклонения γ(о) угла сцепки может быть определена как функция зависимости от длины D прицепа 110, длины W колесной базы транспортного средства 100 и расстояния L от задней оси транспортного средства 100 до прицепа 110, как показано на Фиг. 6, при этом для использования данного уравнения необходимо, чтобы выполнялись указанные выше условия. В частности, к таким условиям обычно относится движение транспортного средства 100 и прицепа 110 задним ходом и примерно постоянные значения измеренного угла сцепки γ(m) и угла поворота δ во время движения задним ходом в течение, по крайней мере, порогового времени или при перемещении на пороговое расстояние.
На Фиг. 7 представлена блок-схема процесса калибровки 700, во время которого выполняется один вариант осуществления процедуры 1308 калибровки угла сцепки, для выполнения способа в соответствии со следующими этапами. На этапе 1320 система принимает значения в целом фиксированных характеристик транспортного средства 100 и прицепа 110, включая длину D прицепа, длину W колесной базы транспортного средства и расстояние L от задней оси транспортного средства до сцепного устройства. Данные фиксированные характеристики отнесены к таковым, поскольку размеры транспортного средства 100 и прицепа 110 могут быть заранее загружены или считаны из таблицы технических характеристик транспортного средства, а в том случае, если данные размеры неизвестны или уже определены системой, они могут быть измерены и записаны на запоминающее устройство 1306 или другое запоминающее устройство транспортного средства до начала работы транспортного средства 100 под управлением системы 105 помощи при движении задним ходом с прицепом. Процедура 1308 калибровки угла сцепки, показанная на Фиг. 7, также включает в себя выполнение этапа 1322, на котором подтверждается, что транспортное средство 100 движется задним ходом, когда датчики сенсорной системы 1200 непрерывно производят измерения параметров транспортного средства 100 и прицепа 110. В частности, система может подтверждать, что транспортное средство 100 движется задним ходом, на основании данных от направленных датчиков скорости, положения рычага переключения передач от контроллера 1318 коробки передач, данных GPS-системы или других индикаторов направления движения транспортного средства 100.
На этапе 1324 система выполняет процедуру 1310 инициирования, которая позволяет подтвердить, что транспортное средство 100 с прицепом 110 находится в состоянии, позволяющем определить отклонение γ(о) между измеренным значением угла сцепки γ(m) и фактическим значением угла сцепки γ(а). Как показано на Фиг. 8, в соответствии с одним вариантом осуществления перед расчетом отклонения процедура 1310 инициирования включает в себя определение скомпенсированного угла 1326 поворота рулевого колеса, вычисление отфильтрованного значения скорости изменения угла 1328 поворота рулевого колеса и последующее определение на этапе 1330 того, меньше ли отфильтрованное значение скорости изменения угла поворота рулевого колеса, чем максимально допустимая скорость изменения угла поворота. Также во время выполнения процедуры 1310 инициирования на этапе 1332 считывается значение измеренного угла γ(m) прицепа, а на этапе 1334 вычисляется отфильтрованное значение скорости изменения угла поворота прицепа в течение определенного периода времени. Перед расчетом величины отклонения на этапе 1336 процедуры инициирования определяется, меньше ли отфильтрованное значение скорости изменения угла прицепа, чем с максимально допустимая скорость изменения угла поворота прицепа. Также в рамках процедуры 1310 инициирования на этапе 1338 выполняется считывание измеренного или полученного иным образом значения скорости движения транспортного средства, а на этапе 1340 выполняется вычисление отфильтрованного значения скорости движения транспортного средства. Перед расчетом величины отклонения на этапе 1342 выполняется обработка отфильтрованного значения скорости движения транспортного средства, на основании которого можно будет определить, меньше ли оно максимально допустимого значения скорости движения транспортного средства. Если на этапе 1344 будет определено, что условия, проверяемые при выполнении процедуры 1310 инициирования, выполняются, система 105 помощи при движении задним ходом с прицепом переходит к определению значения отклонения γ(о), используемого в процедуре 1308 калибровки угла сцепки.
Как показано на Фиг. 7, после завершения выполнения процедуры 1310 инициирования процедура калибровки угла сцепки на этапе 1346 определяет, равны ли скорость изменения угла сцепки и скорость изменения угла поворота нулю, другими словами, являются ли угол сцепки и углы поворота практически постоянными. Если скорость изменения угла сцепки и скорость изменения угла поворота не равны нулю, процедура 1308 калибровки угла сцепки переходит к выполнению этапа 1324 процедуры 1310 и продолжает выполнять измерения с помощью сенсорной системы 1200 до тех пор, пока скорость изменения угла сцепки и скорость изменения угла поворота не станет примерно равной нулю. Когда оба значения будут практически равны нулю, на этапе 1348 процедура 1308 калибровки угла сцепки определит фактический угол сцепки на основании значений постоянных характеристик транспортного средства 100 и прицепа 110, указанных в предыдущих уравнениях. Используя значение фактического угла сцепки γ(а), на этапе 1350 процедура 1308 калибровки угла сцепки может определить величину отклонения γ(о) измеренного значения угла сцепки γ(m) от фактического значения угла сцепки γ(а). После определения величины отклонения γ(о) выполнение модуля калибровки завершается, а система 105 помощи при движении задним ходом с прицепом продолжает работу.
В соответствии с дополнительным вариантом осуществления процедуры 1308 калибровки угла сцепки, изображенной на Фиг. 9, способ позволяет выполнить калибровку системы 105 помощи при движении задним ходом с прицепом 110, присоединенным к транспортному средству 100, на основании которой можно будет направить транспортное средство 100 вперед практически по прямой со скоростью, превышающей пороговое значение. Способ также включает в себя измерение скорости рыскания транспортного средства 100 и измерение угла сцепки γ(m) прицепа 110. Кроме того, способ предусматривает определение скорости изменения угла на основании измеренного значения угла сцепки γ(m) и последующее определение величины отклонения γ(о) измеренного значения угла сцепки γ(m) от фактического значения угла сцепки γ(а) при примерно нулевых значениях скорости рыскания и скорости изменения угла.
В соответствии с описанным выше вариантом осуществления процедуры 1308 калибровки угла сцепки со ссылкой на Фиг. 7, транспортное средство 100 движется задним ходом, следовательно, он подходит для ситуаций, когда транспортное средство 100 не может переместиться вперед на расстояние, достаточное для завершения калибровки системы 105 помощи при движении задним ходом с прицепом. Однако при наличии необходимого расстояния перед транспортным средством 100 может быть использован альтернативный способ, позволяющий определить величину отклонения γ(о) измеренного значения угла сцепки γ(m) от фактического значения угла сцепки γ(а), которое не зависит от точности измеренных или иным образом определенных геометрических параметров и размеров прицепа. В частности, при настройке прицепа 110 с транспортным средством 100 в соответствии с одним вариантом осуществления пользователю может быть предложено измерить различные размеры прицепа 110, включая длину D прицепа. С другой стороны, размеры транспортного средства 100 могут быть достаточно точно измерены после сборки транспортного средства или иным образом введены в систему 105 помощи при движении задним ходом с прицепом, например, с помощью справочной таблицы, поставляемой производителем транспортного средства.
На Фиг. 9 показано, что на этапе 700 система 105 помощи при движении задним ходом с прицепом снова начинает калибровку системы для прицепа 110, присоединенного к транспортному средству 100. На этапе 1352 система принимает значения характеристик транспортного средства, включая размеры и эксплуатационные характеристики транспортного средства 100, такие как включенная передача коробки передач. Затем на основании показаний датчиков сенсорной системы 1200 и других значений на этапе 1354 система подтверждает, что транспортное средство движется вперед. Следует отметить, что в соответствии с представленным вариантом осуществления к используемым датчикам можно отнести датчик определения скорости рыскания транспортного средства, такой как бортовой датчик 1314 скорости рыскания или отдельный датчик, выполненный с возможностью определения скорости рыскания транспортного средства. Также датчики, используемые в соответствии с представленным вариантом осуществления процедуры калибровки угла сцепки, включают в себя по крайней мере один датчик 1312 угла сцепки, как было сказано выше со ссылкой на сенсорную систему 1200.
На Фиг. 9 показано, что на этапе 1356 управляемые колеса 1302 транспортного средства 100 вращаются вперед, перемещая транспортное средство 100 вперед. Подразумевается, что в соответствии с одним вариантом осуществления пользователю может быть предложено направить транспортное средство вперед путем поворота рулевого колеса в ручном режиме. В соответствии с дополнительным вариантом осуществления транспортное средство 100 может двигаться вперед в автоматическом режиме, используя систему 115 усиления рулевого управления. В частности, система 105 помощи при движении задним ходом с прицепом может регулировать положение управляемых колес 1302 транспортного средства 100 с помощью серводвигателя 1300 системы рулевого управления и устройства 140 определения угла поворота управляемых колес.
В соответствии с изображенным вариантом осуществления процедуры 1308 калибровки угла сцепки после получения показаний датчика и направления транспортного средства вперед по прямой на этапе 1358 выполняется переход к процедуре 1310 инициирования. В соответствии с настоящим изобретением процедура 1310 инициирования, аналогичная процедуре инициирования с Фиг. 8, позволяет вычислить отфильтрованные значения скорости изменения угла поворота рулевого колеса, скорости изменения угла сцепки и скорости движения транспортного средства. Также отфильтрованные значения могут быть сравнены с пороговыми значения, что позволит проверить соблюдение условий до начала выполнения процедуры калибровки угла сцепки. В частности, отфильтрованное значение скорости изменения угла поворота может быть меньше максимально допустимой скорости изменения угла поворота, скорость изменения угла поворота прицепа может быть меньше максимально допустимой скорости изменения угла поворота прицепа, а отфильтрованное значение скорости движения транспортного средства может быть меньше максимально допустимой скорости движения транспортного средства, например, 10 миль/ч, 15 миль/ч или другого подходящего порогового значения скорости. После выполнения этих или других условий система может перейти на следующий этап процедуры калибровки угла сцепки.
На Фиг. 9 также показано, что на этапе 1360 процедура 1308 калибровки угла сцепки определяет, равны ли скорость изменения угла сцепки и скорость рыскания нулю. В частности, значение практически равно нулю в том случае, когда значение становится почти равным нулю и/или когда значение остается равным или почти равным нулю в течение заранее заданного времени. Подразумевается, что приращение времени может быть пропорционально отфильтрованному значению скорости транспортного средства, так что при увеличении скорости транспортного средства происходит уменьшение приращения времени, в течение которого измеренное значение угла сцепки γ(m) и угол поворота должны оставаться практически постоянными, чтобы определить отклонение γ(о). Также подразумевается, что отклонение может быть определено, когда измеренное значение угла сцепки и значение угла поворота являются практически постоянными во время движения транспортного средства с прицепом задним ходом на пороговое расстояние, при этом расстояние больше половины длины окружности управляемого колеса транспортного средства или другого подходящего значения расстояния. Когда система обнаруживает, что оба значения практически равны нулю, на этапе 1362 система может определить фактический угол сцепки γ(а) на основании характеристик транспортного средства. В соответствии с одним вариантом осуществления при выполнении упомянутых выше условий фактический угол сцепки γ(а) становится равным нулю. Однако при соблюдении данных условий некоторые характеристики транспортного средства, такие как место смещения сцепки, могут привести к тому, что фактический угол сцепки γ(а) будет отклоняться от нуля. Для управления работой системы 105 помощи при движении задним ходом с прицепом на этапе 1364 система определяет величину отклонения γ(о) фактического значения угла сцепки γ(а) от измеренного значения угла сцепки γ(m). На этапе 704 система 105 помощи при движении задним ходом с прицепом может уведомлять водителя о завершении калибровки и сохранять значение отклонения угла сцепки на запоминающем устройстве, соответствующем присоединенному прицепу 110.
На Фиг. 10 показан дополнительный вариант осуществления процедуры 1308 калибровки угла сцепки, с помощью которой можно определить направление движения транспортного средства или возможное направление движения до выбора способа определения отклонения γ(о) для измеренного значения угла сцепки γ(m). Направление движения транспортного средства может быть определено на основании включенной передачи коробки передач, например включения передачи переднего или заднего хода для автоматических коробок передач. Возможное направление движения транспортного средства, однако, может зависеть от доступного пространства перед и за транспортным средством с прицепом. На этапе 1366, если транспортное средство 100 движется вперед или назад, система может определить имеется ли достаточно пространства для продолжения перемещения транспортного средства 100 в данном направлении и завершения калибровки системы 105 помощи при движении задним ходом с прицепом. При отсутствии достаточного пространства процедура 1308 калибровки угла сцепки, соответствующая представленному варианту осуществления, может предлагать водителю направить транспортное средство 100 в противоположном или другом направлении, при движении в котором можно будет завершить калибровку. Если транспортное средство 100 неподвижно, система может определить предпочтительное направление движения транспортного средства 100 и прицепа 110 (на основании возможности перемещения транспортного средства 100 на необходимое расстояние), при движении в котором можно будет завершить калибровку системы 105 помощи при движении задним ходом с прицепом. На этапе 1368 система может предложить водителю, например, через человеко-машинный интерфейс, проехать вперед или назад в зависимости от результатов выполнения этапа 1366. В соответствии с данным вариантом осуществления, на основании выбранного направления движения транспортного средства процедура 1308 калибровки угла сцепки может использовать один из двух альтернативных способов определения фактического угла сцепки γ(а) для завершения калибровки. В частности, если транспортное средство 100 движется вперед на этапе 1370, то на этапе 1372 система будет обеспечивать рулевое управление так, что транспортное средство движется вперед, одновременно измеряя скорость рыскания транспортного средства на этапе 1374, и скорость изменения угла сцепки на этапе 1376. Измеренное значение угла сцепки γ(m) будет использоваться системой для определении скорости изменения угла сцепки на этапе 1378, после чего будет выполнен этап 1380, на котором будет определено, равны ли нулю скорость изменения угла сцепки и скорость рыскания транспортного средства, как было описано выше со ссылкой на вариант осуществления с Фиг. 9. Когда скорость изменения угла сцепки и скорость рыскания транспортного средства станут практически равны нулю, на этапе 1380 процедуры 1308 калибровки угла сцепки может быть определено, что значение фактического угла сцепки γ(а) практически равно нулю, которое используется вместе с измеренным значением угла сцепки γ(m) при определении величины отклонения γ(о) на этапе 1382.
В качестве альтернативы, если на этапе 1384 транспортное средство 100 движется задним ходом или ему предложено двигаться задним ходом, как только такое движение начинается, система переходит к определению угла δ поворота транспортного средства 100 на этапе 1386 и определению угла сцепки γ(m) на этапе 1388, на основании которых на этапе 1390 может быть определено значение скорости изменения угла сцепки и значение скорости изменения угла поворота. На этапе 1392 система определяет, равны ли нулю скорость изменения угла сцепки и скорость изменения угла поворота. Когда оба значения практически равны нулю, процедура 1308 калибровки угла сцепки может включать в себя определение величины отклонения γ(о) для измеренного значения угла сцепки γ(m) на основании длины D прицепа 110, длины W колесной базы транспортного средства 100 и расстояния L от задней оси транспортного средства 100 до прицепа 110 в соответствии с описанием процедуры 1308 калибровки угла сцепки со ссылкой на Фиг. 7 и 8. В соответствии с вариантом осуществления с Фиг. 10 после определения величины отклонения γ(о) угла сцепки на этапе 1382 процедура калибровки переходит на этап 704 и может выдать водителю уведомление, например, на человеко-машинный интерфейс или другое устройство оповещения.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения и что подобные концепции определены следующей формулой изобретения, если явно не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2627219C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2575663C1 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ДВИЖУЩЕЙ СИЛЫ И УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДВИЖУЩЕЙ СИЛЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 2019 |
|
RU2786284C1 |
Представлены система и способ калибровки комплекта помощи при движении задним ходом с прицепом, присоединенным к транспортному средству. Способ включает в себя движение транспортного средства вперед практически по прямой со скоростью, превышающей пороговое значение, измерение скорости рыскания транспортного средства и измерение угла сцепки прицепа. Для определения угловой скорости на основании измеренного значения угла сцепки датчик рыскания непрерывно измеряет скорость рыскания транспортного средства, а датчик угла сцепки непрерывно измеряет значение угла сцепки. Также контроллер определяет отклонение измеренного значения угла сцепки от фактического угла сцепки при практически нулевых значениях скорости рыскания и угловой скорости, или если они остаются неизменными. Технический результат - предоставление экономичной и интуитивно понятной функциональной помощи при движении задним ходом транспортного средства с прицепом. 3 н.и 17 з.п. ф-лы, 10 ил.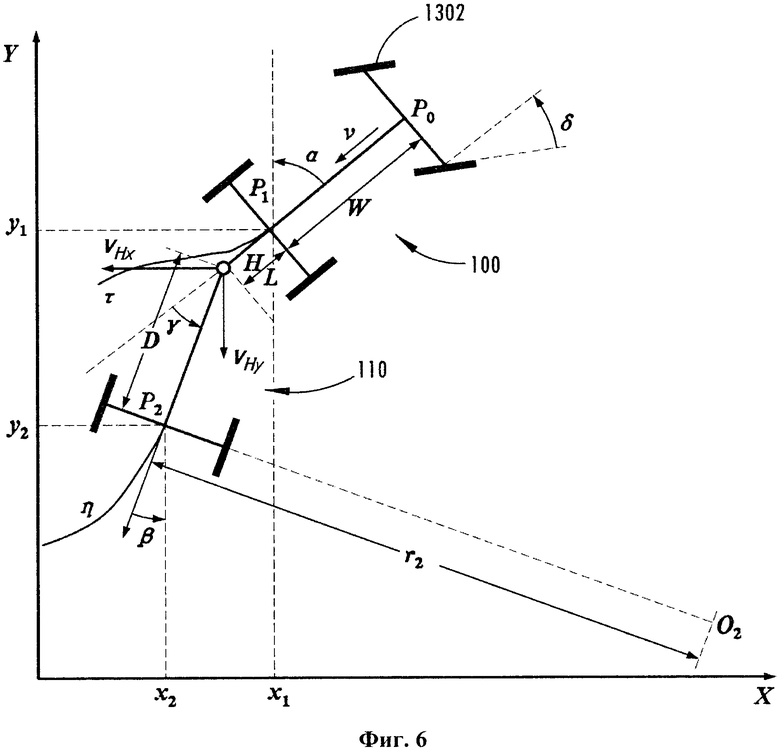
1. Способ калибровки датчика угла сцепки для системы помощи при движении задним ходом транспортного средства с прицепом, в котором:
осуществляют движение транспортного средства вперед практически по прямой со скоростью, превышающей пороговое значение;
измеряют скорость рыскания транспортного средства датчиком рыскания;
измеряют угол сцепки прицепа датчиком угла сцепки;
определяют угловую скорость на основании измеренного угла сцепки; и
определяют отклонение измеренного значения угла сцепки от фактического значения угла сцепки, когда скорость рыскания и угловая скорость практически равны нулю.
2. Способ по п. 1, в котором дополнительно выполняют руление транспортным средством с практически постоянным углом поворота, чтобы транспортное средство двигалось практически по прямой.
3. Способ по п. 1, в котором отклонение определяют, когда скорость рыскания и угловая скорость являются практически равными нулю в течение порогового периода времени.
4. Способ по п. 1, в котором датчик угла сцепки включает в себя видеокамеру транспортного средства, которая контролирует метку на прицепе.
5. Способ по п. 1, в котором определение отклонения выполняют независимо от значений размеров транспортного средства и прицепа.
6. Способ по п. 1, в котором отклонение определяют, когда фактическое значение угла сцепки является практически нулевым.
7. Способ по п. 6, в котором на основании длины прицепа и измеренного значения угла сцепки дополнительно определяют примерное расстояние, которое транспортному средству необходимо проехать вперед практически по прямой для того, чтобы фактический угол сцепки стал равен нулю.
8. Способ по п. 7, в котором движение транспортного средства вперед практически по прямой осуществляют на расстояние, превышающее примерное значение расстояния, которое используется для определения отклонения.
9. Способ калибровки датчика угла сцепки для системы помощи при движении задним ходом транспортного средства с прицепом, в котором:
осуществляют движение транспортного средства вперед со скоростью, превышающей пороговое значение;
направляют транспортное средство по прямой;
измеряют угол сцепки прицепа датчиком угла сцепки;
определяют угловую скорость на основании измеренного угла сцепки;
определяют отклонение измеренного значения угла сцепки от фактического значения угла сцепки, когда угловая скорость практически равна нулю.
10. Способ по п. 9, в котором дополнительно измеряют угловые изменения транспортного средства с помощью инерционного датчика на транспортном средстве, а определение отклонения выполняют, когда эти изменения являются практически нулевыми.
11. Способ по п. 9, в котором отклонение определяют, когда скорость рыскания и угловая скорость остаются практически равными нулю в течение порогового периода времени, в то время как транспортное средство движется вперед со скоростью, превышающей пороговое значение.
12. Способ по п. 11, в котором датчик угла сцепки включает в себя видеокамеру транспортного средства, которая контролирует метку на прицепе.
13. Способ по п. 9, в котором дополнительно выполняют руление транспортным средством с использованием практически постоянного угла поворота, чтобы транспортное средство двигалось практически по прямой, отклонение определяют, когда фактическое значение угла сцепки практически равно нулю.
14. Способ по п. 13, в котором на основании длины прицепа и измеренного значения угла сцепки дополнительно определяют примерное расстояние, которое транспортному средству необходимо проехать вперед практически по прямой для того, чтобы фактический угол сцепки стал равен нулю.
15. Способ по п. 14, в котором в котором движение транспортного средства вперед практически по прямой осуществляют на расстояние, превышающее примерное значение расстояния, которое используется для определения отклонения.
16. Система для калибровки датчика угла сцепки для системы помощи при движении задним ходом транспортного средства с прицепом, которая включает в себя:
датчик угла сцепки, который непрерывно измеряет угол сцепки для определения угловой скорости;
датчик рыскания, который непрерывно измеряет скорость рыскания транспортного средства;
контроллер, который выполнен с возможностью определять отклонение измеренного значения угла сцепки, когда транспортное средство движется вперед со скоростью, превышающей пороговое значение, и когда скорость рыскания и угловая скорость практически равны нулю.
17. Система по п. 16, в которой определение отклонения измеренного значения угла сцепки от фактического угла сцепки выполняется, когда фактический угол сцепки равен нулю.
18. Способ по п. 16, в котором контроллер выполнен с возможностью определять угловую скорость на основании изменений измеренного значения угла сцепки во времени, а датчик угла сцепки включает в себя видеокамеру транспортного средства, которая контролирует метку на прицепе.
19. Система по п. 16, в которой скорость рыскания транспортного средства практически равна нулю, когда транспортное средство движется по прямой, и в которой определение отклонения выполняется во время движения транспортного средства вперед со скоростью, превышающей пороговое значение, когда угловая скорость практически равна нулю в течение порогового периода времени.
20. Система по п. 16, в которой контроллер на основании длины прицепа и измеренного значения угла сцепки определяет примерное расстояние, которое транспортному средству необходимо проехать вперед практически по прямой для того, чтобы фактический угол сцепки стал равен нулю, и в которой определение отклонения выполняется, когда угловая скорость является практически постоянной, пока транспортное средство перемещается прямо вперед на расстояние за пределами указанного примерного расстояния.
| US 20050206226 A1, 22.09.2005 | |||
| US 0007950751 B2, 31.05.2011 | |||
| WO 2012103193 A1, 02.08.2012 | |||
| Рулевое управление многозвенного транспортного средства | 1982 |
|
SU1044534A1 |

