Изобретение относится к области автоматических систем управления и может быть использовано для решения задач приведения динамических систем в заданную точку фазового пространства за заданное время.
Наиболее близкими по технической сущности к заявленному изобретению являются решения, реализующие алгоритмы «мягкого» терминального управления в статье Разоренова Г.Н. «Метод синтеза законов «мягкого» и «сверхмягкого» управления конечным состоянием систем» /Г.Н. Разоренов //Изв. РАН. Теория и системы управления. – 2013. – №2. – С. 3 – 17. Их недостатком является эффект резкого увеличения управляющей силы в терминальной точке. Это связано с особенностью решения в конечный момент времени. Данное обстоятельство хорошо изучено и для борьбы с ним разработаны различные приемы устранения такой особенности. Однако непосредственное использование таких решений приводит к тому, что в конечный момент времени управляемая динамическая система находится в некоторой окрестности терминального состояния, что является недостатком.
Цель изобретения – повышение точности управления за счет устранения эффекта резкого возрастания управляющей силы в терминальной точке.
Техническим результатом является снижение ошибки управления в терминальной точке, что достигается устройством терминального управления, которое содержит блок отношения 1, блоки сумматоров 2, 5, 7, 6, 19, блоки умножения 3, 4, 8, 9, 10, 12, 13, 14, 15, 16, 17, 20, 21, 22, блок 11 вычисления производной, блок 18 линии задержки, вход эталонного сигнала, блок хранения констант 23.
Сущность изобретения поясняется фигурой 1, где представлено устройство терминального управления, при этом вход устройства соединен со входом блока 18 линии задержки и входом 2 блока 19 формирования суммы, выход блока 18 соединен со входом блока 11 формирования производной, выход блока 11 соединен со входом 1 блока 6 формирования суммы, выход которого соединен со входом 1 блока 3 формирования произведения, выход которого соединен со входом 1 блока 2 формирования суммы, выход которого соединен со входом 1 блока 1 формирования отношения, выход которого является выходом устройства, первый выход блока 23 хранения констант соединен со входом 1 блока 21 формирования произведения, выход которого соединен со входом 1 блока 19 формирования суммы, выход которого соединен со входом 2 блока 8 формирования произведения, выход которого соединен со входом 1 блока 5 формирования суммы, выход которого соединен со входом 2 блока 1 формирования отношения, выход 2 блока 23 соединен со входом 1 блока 14 формирования произведения, входом 2 блока 4 формирования произведения и входами 1, 2 блока 20 формирования произведения, выход которого соединен со входом 1 блока 13, выход которого соединен со входом 1 блока 8, выход 3 блока 23 соединен со входом 2 блока 14 и входом 2 блока 12 формирования произведения, выход 4 блока 23 соединен со входом 3 блока 14 и входом 2 блока 13 формирования произведения, выход 5 блока 23 соединен со входом 1 блока 9 формирования произведения, входом 1 и 2 блока 15 формирования произведения и входами 1, 2, 3 блока 16 формирования произведения, выход которого соединен со входом 2 блока 17 формирования произведения, выход которого соединен со входом 1 блока 7 формирования суммы, выход которого соединен со входом 2 блока 5, выход 6 блока 23 соединен со входом 1 блока 4 и входом 1 блока 22 формирования произведения, выход которого соединен со входом 1 блока 17 и входом 2 блока 10 формирования произведения, выход которого соединен со входом 3 блока 2, выход блока 4 соединен со входом 2 блока 3, выход 7 блока 23 соединен со входом 2 блока 22, входом 2 блока 21 и входом 1 блока 12, выход которого соединен со входом 2 блока 6, выход блока 14 соединен со входом 2 блока 2 и со входом 2 блока 9, выход которого соединен со входом 2 блока 7, выход блока 15 соединен со входом 1 блока 10.
Пояснить работу устройства позволят следующие выкладки.
Структура оптимального закона управления как функции обобщенных координат имеет вид:
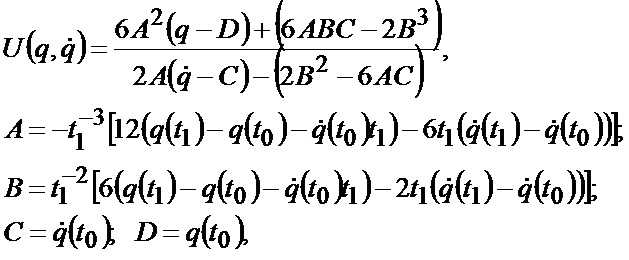
где 


Устройство работает следующим образом. В момент времени 









Заявленный технический результат достигается за счет выбора 
Рассмотрим конкретный пример решения задачи терминального управления. Результаты получены на основе математического моделирования.
Пусть 
тогда уравнения Аппеля записываются в следующей форме:
где 
Требуется синтезировать в аналитическом виде закон оптимального управления динамической системой (2), переводящий ее из начального состояния в состояние покоя из условия минимума целевого функционала:
пусть время задано в безразмерных единицах: 
В соответствии с (2), (3)
Решение этого уравнения имеет вид:

Постоянные интегрирования определяются из краевых условий (1). Исключение времени t1 из (6) позволяет получить структуру закона управления (1).
Оценка эффективности предлагаемого решения проводится на основе сравнения с оптимальным законом терминального «мягкого» управления
Эти решения имеют особенность в конечный момент времени.
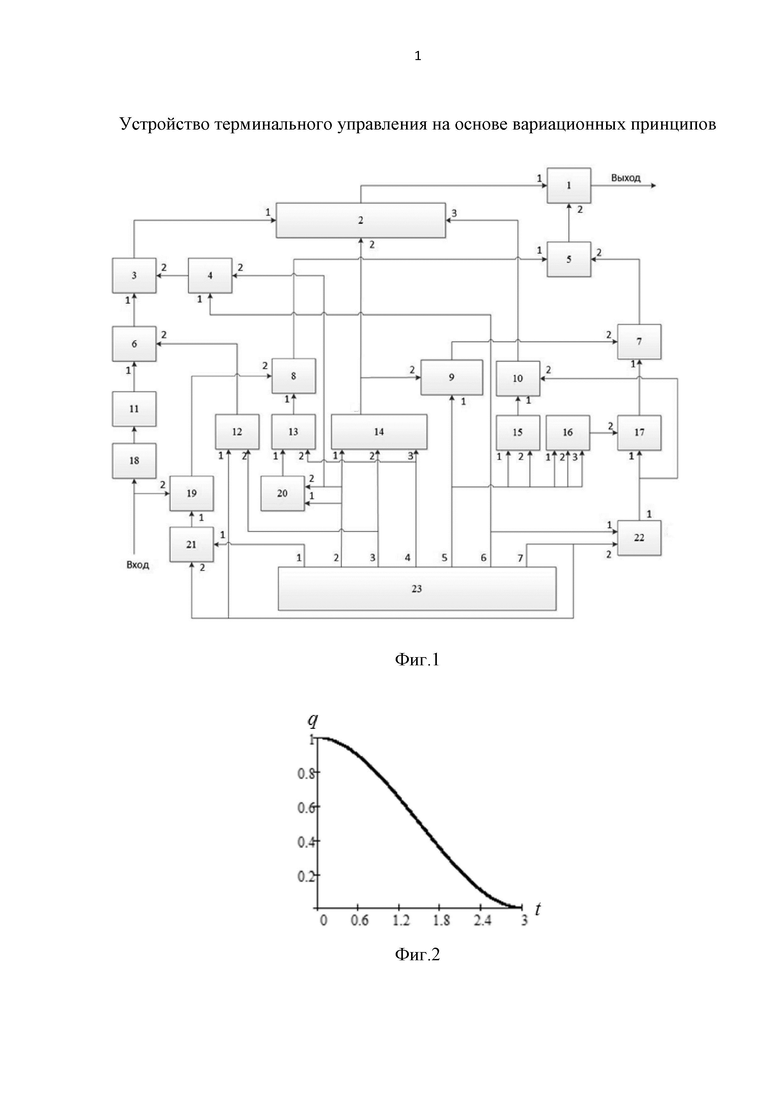
На фигуре 2 изображен закон изменения координаты, на фигуре 3 изображен закон изменения скорости. Решения формул (7) и (1) визуально совпадают.
На фигуре 4 приведены управляющие силы, где сплошной линией обозначены кривые, полученные с использованием формулы (1), а пунктирной линией - на основе формулы (7).
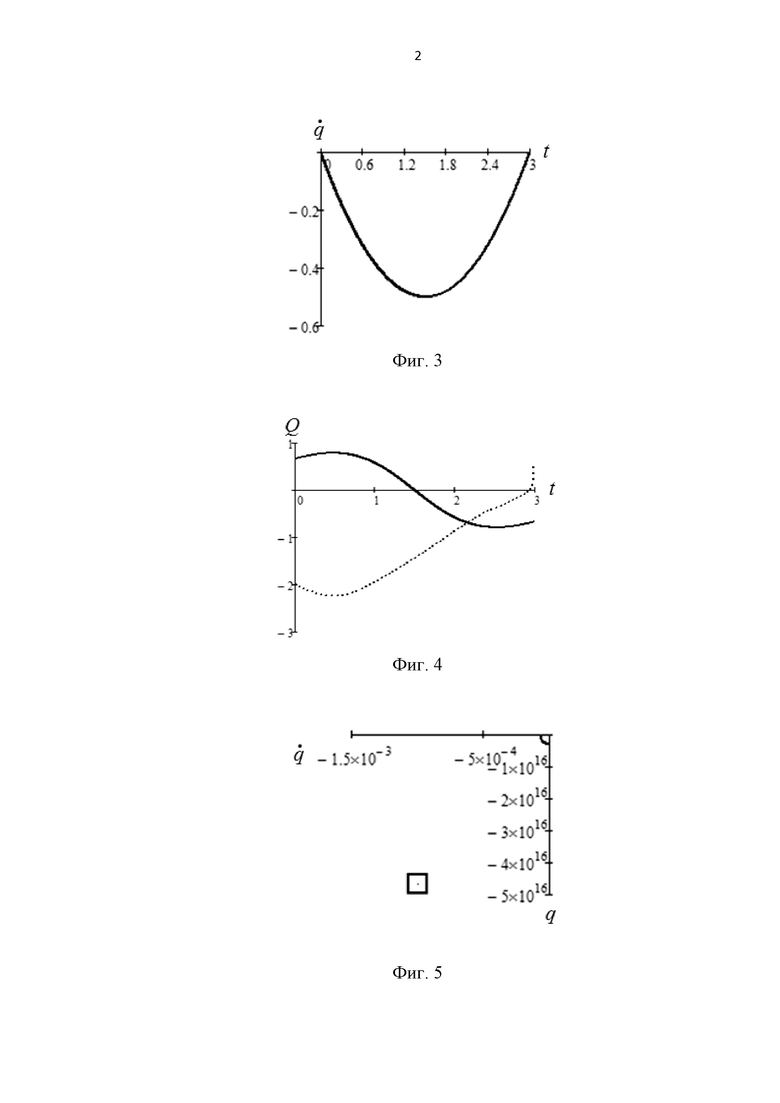
На фигуре 5 представлен фазовый портрет в конечный момент времени. Расчеты показали, что в конечный момент времени (1) обеспечивается точное попадание в точку 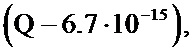

Результаты, приведенные в примере, позволяют сделать заключение о достижении заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления автоматическими системами при структурной неопределенности | 2018 |
|
RU2697728C1 |
| МНОГОРЕЖИМНОЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ С АДАПТАЦИЕЙ | 2019 |
|
RU2713726C1 |
| УСТРОЙСТВО АДАПТИВНОГО РЕГУЛИРОВАНИЯ НА ОСНОВЕ ОБЪЕДИНЁННОГО ПРИНЦИПА МАКСИМУМА | 2016 |
|
RU2646373C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МНОГОКАСКАДНЫЙ ФИЛЬТР | 2010 |
|
RU2436228C1 |
| Устройство синхронизации с нечетким контроллером | 2023 |
|
RU2810551C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2007 |
|
RU2357357C2 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИТЕРАТИВНЫЙ ФИЛЬТР | 2007 |
|
RU2362265C1 |
| ЦИФРОВОЙ МНОГОИТЕРАЦИОНАЛЬНЫЙ ФИЛЬТР | 2011 |
|
RU2452080C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ОБЪЕКТОМ СО СВОБОДНЫМ ВЫБОРОМ ПОВЕДЕНИЯ | 2014 |
|
RU2555234C1 |
| Устройство для приема обобщенного телеграфного сигнала | 1982 |
|
SU1163485A1 |
Устройство терминального управления на основе вариационных принципов содержит блок отношения, пять блоков сумматоров, четырнадцать блоков умножения, блок вычисления производной, блок линии задержки, вход эталонного сигнала, блок хранения констант, соединенных определенным образом. Обеспечивается повышение точности управления. 5 ил.
Устройство терминального управления на основе вариационных принципов содержит блок отношения 1, блоки сумматоров 2, 5, 7, 6, 19, блоки умножения 3, 4, 8, 9, 10, 12, 13, 14, 15, 16, 17, 20, 21, 22, блок 11 вычисления производной, блок 18 линии задержки, вход эталонного сигнала, блок хранения констант 23; при этом вход устройства соединен со входом блока 18 линии задержки и входом 2 блока 19 формирования суммы, выход блока 18, соединен со входом блока 11 формирования производной, выход блока 11 соединен со входом 1 блока 6 формирования суммы, выход которого соединен со входом 1 блока 3 формирования произведения, выход которого соединен со входом 1 блока 2 формирования суммы, выход которого соединен со входом 1 блока 1 формирования отношения, выход которого является выходом устройства, первый выход блока 23 хранения констант соединен со входом 1 блока 21 формирования произведения, выход которого соединен со входом 1 блока 19 формирования суммы, выход которого соединен со входом 2 блока 8 формирования произведения, выход которого соединен со входом 1 блока 5 формирования суммы, выход которого соединен со входом 2 блока 1 формирования отношения, выход 2 блока 23 соединен со входом 1 блока 14 формирования произведения, входом 2 блока 4 формирования произведения и входами 1, 2 блока 20 формирования произведения, выход которого соединен со входом 1 блока 13, выход которого соединен со входом 1 блока 8, выход 3 блока 23 соединен со входом 2 блока 14 и входом 2 блока 12 формирования произведения, выход 4 блока 23 соединен со входом 3 блока 14 и входом 2 блока 13 формирования произведения, выход 5 блока 23 соединен со входом 1 блока 9 формирования произведения, входом 1 и 2 блока 15 формирования произведения и входами 1, 2, 3, блока 16 формирования произведения, выход которого соединен со входом 2 блока 17 формирования произведения, выход которого соединен со входом 1 блока 7 формирования суммы, выход которого соединен со входом 2 блока 5, выход 6 блока 23 соединен со входом 1 блока 4 и входом 1 блока 22 формирования произведения, выход которого соединен со входом 1 блока 17 и входом 2 блока 10 формирования произведения, выход которого соединен со входом 3 блока 2, выход блока 4 соединен со входом 2 блока 3, выход 7 блока 23 соединен со входом 2 блока 22, входом 2 блока 21 и входом 1 блока 12, выход которого соединен со входом 2 блока 6, выход блока 14 соединен со входом 2 блока 2 и со входом 2 блока 9, выход которого соединен со входом 2 блока 7, выход блока 15 соединен со входом 1 блока 10.
| Устройство терминального управления | 1987 |
|
SU1548774A1 |
| Способ очистки лиственичной камеди | 1935 |
|
SU51941A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ОБЪЕКТОМ СО СВОБОДНЫМ ВЫБОРОМ ПОВЕДЕНИЯ | 2014 |
|
RU2555234C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |

