Изобретение относится к области систем автоматического управления и предназначено для управления динамическими системами, терминальное (конечное) состояние которых описывается k координатами (,2, . „.) , а время достижения этого состояния фиксировано или ограничено.
Цель изобретения - повышение качества управления объектом.
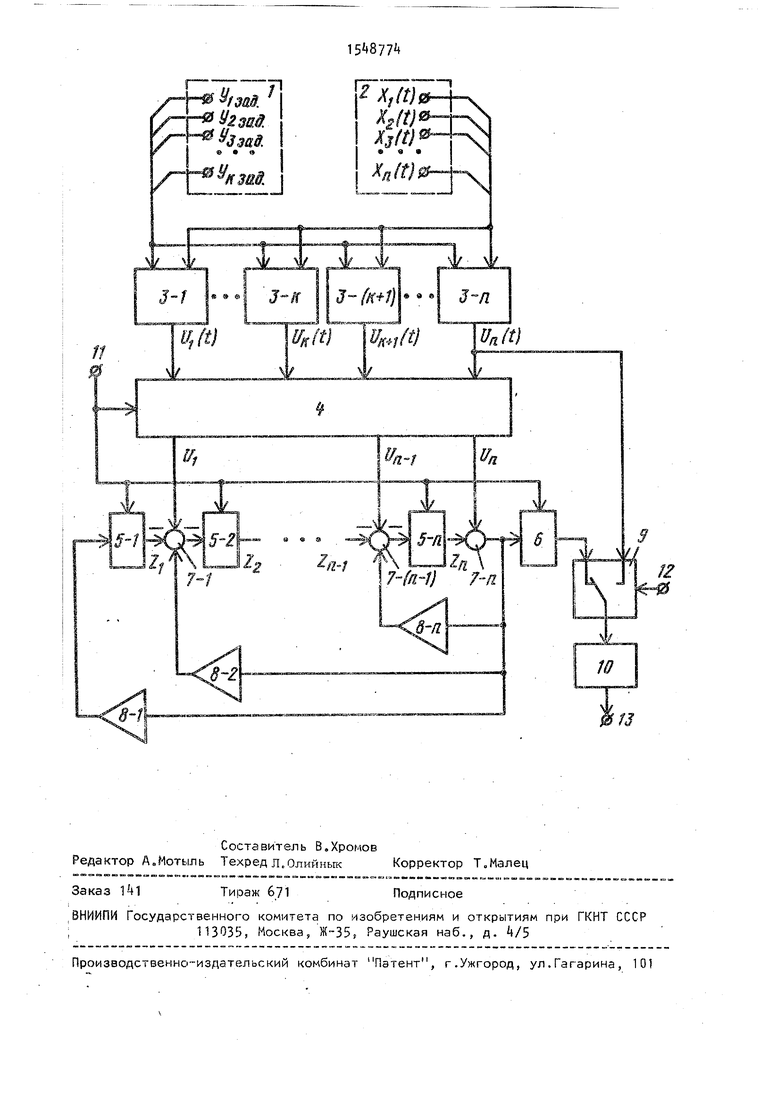
На чертеже представлена функциональная схема устройства терминального управления.
Устройство терминального управления содержит блок 1 k задатчиков, блок 2 п шин координат объекта управ ления, п суммирующих усилителей 3-1, 3-2,...,3-п, блок k элементов выборки-хранения, п интеграторов, 5-1, 5-2,...,5-п, снабженных схемой сброса, ключ 6, п сумматоров 7-1,7-2,..., 7-n, n масштабных усилителей 8-1, 8-2,...,8-п, коммутатор 9, инвертор 10, шину 11 Старт-стоп, шину 12 переключения режимов работы и выходную шину 13 устройства.
Устройство терминального управления работает следующим образом.
Объект управления представлен в форме фазовой переменной
x(t)Ax(t)+BU(t), (1)
y(t)-Cx(t),(2)
где x(t) -n-мерный вектор состояния
(координат объекта); U(t) - скалярное управление; y(t) - k-мерный выходной вектор (выходные координаты объекта) ; А,В,С - числовые матрицы вида:
сл
Ј 00
4ь
А ..о: В- ; 0 (3)
ч
где Z( t)Z1(t),Z2(t ),..., , U{0) U ,(0),иг(0 ),..., Un(0).
Для величин U,(0), ,2,...,n получают
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство терминального управления | 1986 |
|
SU1332262A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2000 |
|
RU2179736C2 |
| Амплитудно-фазовый анализатор гармоник | 1985 |
|
SU1272272A2 |
| Способ получения цветоделенных изображений и устройство для его осуществления | 1985 |
|
SU1264129A1 |
| Анализатор импульсных моментовлиНЕйНыХ СиСТЕМ АВТОМАТичЕСКОгОРЕгулиРОВАНия | 1979 |
|
SU847283A1 |
| Устройство для моделирования линейных динамических систем | 1978 |
|
SU742974A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ПЕРЕНОСНОЙ ЦИФРОВОЙ ИЗМЕРИТЕЛЬ БОЛЬШИХ ПОСТОЯННЫХ ТОКОВ | 1996 |
|
RU2131128C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КИНООПЕРАТОРА | 1991 |
|
RU2032200C1 |
Изобретение относится к области систем автоматического управления и предназначено для управления динамическими системами, терминальное (конечное) состояние которых описывается K координатами, а время достижения этого состояния фиксировано. Целью изобретения является повышение качества управления объектом. Устройство терминального управления содержит блок K задатчиков, блок N шин координат объекта управления, N суммирующих усилителей, блок элементов выборки-хранения, N интеграторов, снабженных схемой сброса, ключ, N сумматоров, N масштабных усилителей, коммутатор, инвертор, шину "Старт-стоп", шину переключения режимов работы и выходную шину устройства. 1 ил.
В соотношениях (3) с(; -коэффициенты характеристического полинома o/,+cLS+
,, П-1 , „ Иi
и.(о) ZF, х,(о)+ Ј с
/.1 I
; jyj5.
(7)
+S ; С - числовая матрица
+ ...+o(l,SI полного ранга k.
Целью управления является перевод объекта (1) из произвольного состоя- ния х(0) в условно начальный момент времени 10щО в такое конечное состояние х(Т), чтобы выходной вектор у(Т) в момент времени Т принял заданное значение у Зо,д
y(T)Cx(T)(T)y3e(At (А)
ю
где коэффициенты передач F ,.., G .. заранее рассчитываются и устанавливаются по соответствующим входам суммирующих усилителей , ,-,...,n на основании следующего.
Коэффициенты усиления масштабных 1$ усилителей 8-1,8-2,...,8-п устанавливаются равными соответствующим коэффициентам о/, , о(г
o(h характеристического полинома объекта (1), так что в соответствии с чертежом для
при этом управление U(t), реализующее 2Q вектора Z(t )CZ ,(t ),Z a(t),... ,Zh(t) ,
. 30
этот перевод, имеет минимальную норму
т
Jji 2 (t )dt0 Это основной режим работы
устройства терминального управления, в котором коммутатор 9 управляющим 25 сигналом с шины 12 через первый вход (подключает выходной сигнал ключа 6 через инвертор 10 к выходной шине устройства 13. Е другом режиме, когда .Управление формируется через второй вход коммутатора, реализуется обычный Јакон управления с обратной связью. 0 этом случае время перевода строго не фиксировано, а время Т определяет требуемую по физическим соображениям Честкость управляющего воздействия.
В исходном состоянии по команде Стоп с шины 11 интеграторы , $-2,.„„,5-п разряжаются, блок 4 работает в режиме слежения за выходными сигналами U,(t), U4(t ),.„., Un(t) n суммирующих усилителей ,,, с выходов блоков 1 и 2 поступают сигналы с заданном У,-,ИЛ, i ,2, „.. ,k
определяющего состояние интеграторов, получают
Z(t) -ATZ(t) - ATU(C.(8)
Совокупность соотношений (1), (6) и (8) можно представить в следующем компактном виде:
x(t)(t)+B tU(0),
fx(t) -ВВТ
и:
где x(t)
Z(c)
АЧ.О
-А
В
-ввт
-АГ
(Ю)
35
Определяют такой постоянный на отрезке времени О,Т вектор U(0), чтобы выходной вектор y(t) системы (9)
с
(t))+DU(0)
О I о
40
Гх(О
° |U(0) О ъ
- n-fc
(ft)
и текущем х ,-, j 1,2,0..,n состоянии
5«Л
(
объекта управления, ключ б разомкнут и на выходной шине 13 сигнал управления отсутствует. По команде Старт с шины 11 в условно начальный момент времени блоком фиксируются значения U/0), U й(0)... s Uh(0), интеграторы переводятся в режим интег- 1рирования, ключ 6 замыкается и на айне 13 формируется сигнал управления
U(t) -CZn(t) + Uh(0), (5) где Z (t) - выходной сигнал интегратора Учитывая (3), выражение (5) можно представить в виде
U(t)(t)n-U(0)3, (6)
45
|LZ(t )j L и ; J-h-fcj в момент времени -Т, принимая следующее заданное значение,
У(Т)
Гуз«.1
1о J
зад
12)
50
55
В соотношении (11) через I обозначена единичная матрица размерности n-k,
Из соотношений (9)™(12) и условия постоянства U(0) следует, что
и(о)(т„о) (т оь(о)+
+ (T,0)+D - y3eiA,(13)
где Ф(Т,0)ехр(), H(TS0)
f exp().
и.(о) ZF, х,(о)+ Ј с
/.1 I
; jyj5.
(7)
ю
где коэффициенты передач F ,.., G .. заранее рассчитываются и устанавливаются по соответствующим входам суммирующих усилителей , ,-,...,n на основании следующего.
Коэффициенты усиления масштабных усилителей 8-1,8-2,...,8-п устанавливаются равными соответствующим коэффициентам о/, , о(г
o(h характеристического полинома объекта (1), так что в соответствии с чертежом для
вектора Z(t )CZ ,(t ),Z a(t),... ,Zh(t)
определяющего состояние интеграторов, получают
Z(t) -ATZ(t) - ATU(C.(8)
Совокупность соотношений (1), (6) и (8) можно представить в следующем компактном виде:
x(t)(t)+B tU(0),
fx(t) -ВВТ
и:
30
5
где x(t)
Z(c)
АЧ.О
-А
В
-ввт
-АГ
(Ю)
Определяют такой постоянный на отрезке времени О,Т вектор U(0), чтобы выходной вектор y(t) системы (9)
с
(t))+DU(0)
О I о
- n-fc
Гх(О
° |U(0) О ъ
(ft)
|LZ(t )j L и ; J-h-fcj в момент времени -Т, принимая следующее заданное значение,
Гуз«.1
1о J
зад
12)
В соотношении (11) через I обозначена единичная матрица размерности n-k,
Из соотношений (9)™(12) и условия постоянства U(0) следует, что
и(о)(т„о) (т оь(о)+
+ (T,0)+D - y3eiA,(13)
где Ф(Т,0)ехр(), H(TS0)
f exp().
Так как переменные Z,,Z-,...,&„ предварительно обнуляются сбрасываются в нулевое состояние интеграторы 5-1,5-2,.оо,5-п), то с учетом (12) соотношение (13) равносильно следующему
U(0)Fx(0) + Gy3M,
блока элементов выборки-хранения, вторые входы - с соответствую, ши выходами k-1 интеграторов, нам ая с второго интегратора, а трет-.- входы -i с соответствующими выходами k-1 масштабных усилителей, начиная с второго масштабного усилителя, выход первого масштабного усилителя соединен с инв котором подматрицы F, G являются блоками соответствующих матриц в (13)- 10 Формациэнным входом первого интегра- Элементы Fr , G ,j подматрицы F, G тора, выход ключа подключен к первому используются в качестве коэффициен- информационному входу коммутатора, ,тов передач в (7), устанавливаемых по соответствующим входам суммирующих
к управляющему входу которого подключена шина переключения режимов рабоусилителей 3-1, 3-2,...,3-п.15 ты отличающееся тем,
Таким образом, выражение (6) обес- что с мелью повышения каиества уп- печивает выполнение терминального условия (12)г котооое включает исходное терминальное условие (k), и кроме торавления объектом, в него дополнительно введены n-k суммирующих усиу.- телей, n-k+1 сумматоров, n-k+1 20 раторов, n-k+1 масштгСных усилителей и инвертор, выход которого соединен с выходной шиной ус свойства, а вход - с выходом ключа, первая группа из k входов n-k суммирующих усилителей 25 подключена к k выходам блока k задат- чиков, к второй группе из п входов подключены п шин координат объекта управления, выходы n-k суммирующих ус(-т;ителей соединены с соответствую
Устройство терминального управле- 30 щими n-k информационными входами блока элементов выборки-хранения, выход последнего n-го суммирующего усилителя связан также с вторым информационным входом коммутатора, n-k выходов 3 блока элементов выборки-хранения соединены с первыми входами соответствующих n-k сумматоров, вторые входы которых связаны с выходами соответствующих n-k интеграторов, третьи входы ционному входу блока элементов выбор- 40 сумматоров соединены с выходами ки-хранения, управляющий вход которо- соответствующих n-k масштабных усили- го соединен с шиной Старт-стоп, с телей, входы п масштабных усилителей входами установки нуля k-1 интеграто- соединены с выходом последнего п-го ров и управляющим входом ключа, k-1 сумматора, входы установки нуля n-k сумматоров, первые входы которых свя- 45 интеграторов и управляющий вход ключа эаны с соответствующими, k-1 выходами соединены с шиной Старт-стоп.
го имеет минимальную нормуJU2(t)dt,
о
так как вектор Z(t)+U(0).B виде соотношения (8) и условия Z(0)0 равносилен решению сопряженной системы, а условие (12) включает условие трансверсальности.,
Формула изобретения
ния, содержащее блок из k задатчиков, k выходов которого подключены соответственно к первым группам из k входов каждого из k суммирующих усилите- пей, к вторым группам из п входов, каждому из кбторых подключены п шин координат объекта управления, выход каждого из k суммирующих усилителей подключен к соответствующему информаы
блока элементов выборки-хранения, вторые входы - с соответствую, ши выходами k-1 интеграторов, нам ая с второго интегратора, а трет-.- входы -i с соответствующими выходами k-1 масштабных усилителей, начиная с второго масштабного усилителя, выход первого масштабного усилителя соединен с ин3)- 10 Формациэнным входом первого интегра- тора, выход ключа подключен к первому информационному входу коммутатора, х
Формациэнным входом первого интегра- тора, выход ключа подключен к первому информационному входу коммутатора,
к управляющему входу которого подключена шина переключения режимов рабо- У2эай
f$3&d,
о
ЬзвА j
f
s-i
J™ (К+Ц
Vw
ж
,m
XЈft)
/j//;«H-v
seej
xam
Ж.
3-П
(К+Ц
Vwlt)
Un№
w
W
7-fa-lJ 7-n
| Устройство терминального управления | 1986 |
|
SU1332262A1 |
| ( УСТРОЙСТВО ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | |||
